Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЁМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ
Вид РИД
Изобретение
Изобретение относится к аэрокосмической технике и может быть использовано для определения орбиты космического аппарата (КА), снабженного аппаратурой для съемки подстилающей поверхности.
Известен способ определения параметров движения КА при проведении траекторных измерений (патент РФ 2555247 С1; МПК B64G 3/00 (2006.01) G01S 13/58 (2006.01); Опубликовано: 10.07.2015 Бюл. №19), согласно которому при обмене информацией с КА по радиоканалу станции слежения (СС) производит измерение дальности до КА и скорости ее изменения. Основная и дополнительные антенны СС принимают ответный сигнал с КА и передают его в блок интерферометрических измерений (БИИ), имеющий фазовый пеленгатор. В БИИ определяются углы азимута и места КА и скорости их изменения. Для раскрытия неоднозначности угловых измерений они дополнительно производятся на частоте, излучаемой с борта КА и равной 1/4 основной. Это позволяет не применять на СС антенн, создающих укороченные базы. Все шесть измеренных параметров (расстояние, углы и скорости их изменения) передаются в баллистический центр, где по ним определяется траектория и прогноз движения КА. Данный способ обеспечивает упрощение сети слежения за полетом КА при одновременном определении шести параметров движения КА при проведении траекторных измерений одной станцией слежения.
Известен способ определения орбиты и ориентации КА в пространстве (патент РФ 2542599 С2; МПК G01C 21/02 (2006.01); Опубликовано: 20.02.2015 Бюл. №5), согласно которому осуществляют формирование оценок оскулирующих элементов орбиты и углов ориентации КА относительно осей текущей орбитальной системы координат. Эти оценки определяются на основе анализа геоцентрических годографов осей КА, полученных на основе обработки результатов измерений в жестко закрепленном на корпусе КА оптико-электронном приборе координат звезд и их звездных величин. Полученные оценки используются в качестве априорной информации при решении задачи навигации и ориентации на борту КА. При этом восстанавливается возможность функционирования системы автономной навигации и ориентации при аварийном пуске КА, либо при возникновении других нештатных ситуаций, связанных с потерей априорной (опорной) информации. Тем самым повышаются степень автономности и уровень надежности функционирования бортового комплекса управления, повышается степень боевой устойчивости и вероятности выполнения полетного задания. Данный способ обеспечивает расширение функциональных возможностей при автономном определении орбиты и ориентации КА в пространстве при отсутствии априорной информации.
В качестве способа-прототипа выбран способ определения и прогнозирования движения КА (патент РФ 2463223 С1; МПК B64G 3/00 (2006.01); Опубликовано: 10.10.2012 Бюл. №28), согласно которому измеряют траекторные параметры КА на мерном интервале и записывают их в массив исходных измерений на заданном мерном интервале. Выполняют адаптивное уточнение среднего значения баллистического коэффициента нормированного среднеквадратического отклонения и интервала корреляции его вариаций. Массив априорных данных включает в себя число измерений на мерном интервале, значения среднеквадратических погрешностей компонентов вектора измерений, массив средних значений индексов солнечной и геомагнитной активности, а также массив заданных пользователем интервалов прогнозирования. Осуществляют расчет статистических характеристик погрешностей прогнозирования движения на мерном интервале и расчет весовой матрицы методом максимального правдоподобия. Вычисляют оценку вектора состояния КА на момент времени последнего измерения без учета атмосферного торможения. На основе остаточных невязок между измеренными и расчетными значениями параметров орбиты вычисляют оценки текущих и прогнозных значений баллистического коэффициента на основе остаточных невязок и на основе корреляции его вариации. Прогнозируют движение КА с учетом обращения к стандартным модулям интегрирования уравнений движения и расчета статистических характеристик погрешностей при прогнозировании движения. Способ обеспечивает определение и прогнозирование орбит КА, подверженных влиянию торможения в атмосфере.
К недостаткам способа-прототипа относится, в частности, то, что он предусматривает определение текущих параметров орбиты КА как расчетных параметров, вычисляемых на основе массива априорных данных, получаемых на мерных интервалах зон траекторных измерений, и не предусматривает возможности оперативного уточнения параметров орбиты КА вне зон проведения траекторных измерений.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение расширения функциональных возможностей при решении задачи определения орбиты КА.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении определения (уточнения) параметров текущей орбиты КА, снабженного аппаратурой для съемки подстилающей поверхности, при нахождении КА вне зон траекторных/навигационных измерений.
Технический результат достигается тем, что в способе определения орбиты космического аппарата с аппаратурой для съемки подстилающей поверхности, включающем определение параметров, характеризующих орбиту космического аппарата, и прогнозирование по ним значений времени и координат местоположений космического аппарата, дополнительно в течение заданного интервала времени и при нахождении космического аппарата над областью подстилающей поверхности с измеренными значениями пространственных координат точек местности выполняют съемку с космического аппарата подстилающей поверхности при последовательно меняющих знак изменениях угла между нормалью к плоскости орбиты и проекцией оси визирования съемочной аппаратуры на плоскость, перпендикулярную вектору скорости космического аппарата, на моменты выполнения снимков, по ортотрансформированным снимкам определяют географические координаты точек поверхности планеты, соответствующих задаваемым точкам снимка, и определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры, определяют комбинацию точек, в которую входят по одной точке из определенных наборов точек, через которые проходят линии, составляющие между собой углы, сумма которых минимальна, через задаваемое время повторяют вышеописанные действия, после чего за определяемую текущую орбиту космического аппарата принимают прогнозируемые значения координат местоположений космического аппарата, составляющие линию, проходящую с задаваемой точностью в моменты выполнения снимков через точки найденных упомянутых комбинаций точек.
Изобретение поясняется фиг. 1 и 2.
На фиг. 1 представлена схема выполнения снимка фотографируемой подстилающей поверхности, поясняющая получение точек в пространстве, координаты которых в связанной с планетой системе координат с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, задаваемые определяемыми значениям географических координат и соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры.
На фиг. 2 представлена схема, поясняющая определение точек, из которых производилась съемка.
На фиг. 1 обозначено:
Р - подстилающая поверхность;
В - точка центра снимка;
АВ, ВС - расстояния от точки В до краев снимка;
α - угол полураствора поля зрения съемочной аппаратуры;
K1, K2 - точки в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированному снимку.
На фиг. 2 обозначено:
М - линия орбиты КА;
Р - подстилающая поверхность;
Т - линия трассы КА на подстилающей поверхности;
V - вектор скорости КА;
Z - направление в зенит;
Q - направление в надир;
N - вектор нормали к плоскости орбиты КА;
W - направление видимого с КА бега местности подстилающей поверхности;
γ - угол между нормалью к плоскости орбиты и проекцией оси визирования съемочной аппаратуры на плоскость, перпендикулярную вектору скорости КА;
Fi, i=1,3 - центральные точки выполненных с КА снимков;
Kij, i=1,3; j=1,2 - точки в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированным снимкам;
Hi, i=1,3 - наборы точек в пространстве, координаты которых с задаваемой точностью определены по ортотрансформированным снимкам;
D - комбинация точек, в которую входят по одной точке из упомянутых наборов точек, через которые проходят линии, составляющие между собой углы, сумма которых минимальна.
Опишем действия предлагаемого способа.
Рассматриваем орбитальный КА, обращающийся вокруг Земли или другой планеты (Луна, Марс) с измеренными значениями пространственных координат точек поверхности планеты, снабженный аппаратурой для съемки подстилающей поверхности.
Считаем, что съемка подстилающей поверхности выполняется установленной на КА съемочной аппаратурой, для которой заданы такие характеристики как угол поля зрения, фокусное расстояние, размер матрицы прибора с зарядовой связью и т.д.
Считаем, что ось визирования съемочной аппаратуры при выполнении съемки может отклонятся от направления в надир (от направления от КА в подспутниковую точку), при этом, учитывая, что точка пересечения оси визирования съемочной аппаратуры с подстилающей поверхностью перемещается по поверхности планеты в направлении видимого с КА бега местности, наведение оси визирования съемочной аппаратуры на снимаемые объекты, задаваемые на поверхности планеты, выполняется поворотом оси визирования съемочной аппаратуры в направлении, перпендикулярном видимому с КА бегу местности (в плоскости, перпендикулярной вектору скорости КА).
В предлагаемом способе для определения орбиты КА, снабженного аппаратурой для съемки подстилающей поверхности, используют результаты решения задачи определения по выполненным с КА снимкам подстилающей поверхности точек местоположений КА, из которых производилась съемка. Исходными данными для решения задачи определения местоположений КА, из которых производилась съемка, служат опознанные и координатно привязанные (ортотрансформированные) цифровые снимки - снимки, для которых рассчитаны географические координаты каждого пикселя изображения. При решении задачи на снимках анализируются «особые» пиксели - центральный пиксель снимка и пиксели, лежащие на окружности, вписанной в прямоугольник снимка. Поскольку координаты каждого пикселя после ортотрансформирования становятся известны, рассчитывается множество значений расстояний от центрального пикселя снимка до всех лежащих на окружности пикселей. Затем выбираются два противолежащих от центральной точки пикселя, расстояние между которыми является наибольшим.
Так как воображаемая окружность, вписанная в снимок, преобразуется на поверхности планеты в фигуру (пересечение сферы с конусом), близкую к эллипсу, то искомая точка съемки, лежащая в плоскости главного вертикала снимка, оказывается лежащей в плоскости, проходящей через центр снимка В, две найденные точки А и С «большой полуоси» этого «эллипса» (точки А и С определяются как точки, соответствующие максимальному расстоянию между ними) и центр планеты (обозначим его как О).
Таким образом, пространственная задача сводится к плоской задаче, показанной на фиг. 1. При решении математической задачи известны расстояния АВ и ВС; угол полураствора снимка (определяется как угол α полураствора поля зрения съемочной аппаратуры с учетом фокусного расстояния и размера матрицы прибора с зарядовой связью); угол между векторами АВ и ВС, учитывающий сферичность поверхности планеты. По результатам анализа всех известных углов и расстояний вычисляется расстояние от искомой точки съемки (обозначим ее как S) до центра снимка В.
При переходе от решения плоской задачи к решению пространственной задачи учитывается, что вектора ОВ и BS лежат в одной плоскости с векторами АВ и ВС и угол между ними известен. Используем систему координат OXYZ с центром в точке О, ось Y проходит через ОВ, ось X лежит в плоскости ОАВ и ось Z дополняет систему координат до правой. В системе OXYZ вектор BS имеет нулевую компоненту по координате Z, а компоненты по координатам X и Y определяются как проекции BS на ОВ и направление, перпендикулярное ОВ.
Географические координаты точки В в результате ортотрансформирования снимка известны. Поэтому координаты радиус-вектора ОВ могут быть вычислены в некоторой базовой системе координат с началом в центре планеты. Таким образом, можно составить матрицу перехода от базовой системы координат к выбранной выше системе OXYZ и получить радиус-вектор OS (и, таким образом, искомое пространственное положение точки S) в базовой системе координат, связанной с положением центра масс планеты. В общем случае будет построено два положения точки S симметрично относительно линии ОВ. Определение истинного варианта положения точки съемки S осуществляют с применением предложенных в настоящем способе действий.
В предлагаемом способе в течение заданного интервала времени (в течение интервала времени менее задаваемой продолжительности ΔT) и при нахождении КА над областью подстилающей поверхности с измеренными значениями пространственных координат точек местности выполняют съемку с КА подстилающей поверхности при последовательно меняющих знак изменениях угла γ между нормалью к плоскости орбиты и проекцией оси визирования съемочной аппаратуры на плоскость, перпендикулярную направлению полета (вектору скорости) КА, на моменты выполнения снимков.
А именно, съемку выполняют при различных значениях угла γ с разными знаками изменения указанного угла между последовательными снимками (последовательно между первым и вторым, вторым и третьим и т.д. снимками) - знак изменения угла γ между i-ым и (i+1)-ым (первым и следующим за ним вторым) снимками отличается от знака изменения угла γ между (i+1)-ым и (i+2)-ым (вторым и следующим за ним третьим) снимками:
(γ2-γ1)(γ3-γ2)<0 или (γi+1-γi)(γi+2-γi+1)<0,
где γk - значение угла γ на момент выполнения k-го снимка.
(γk+1-γk) - изменение угла γ между двумя последовательными снимками (снимками k и k+1).
Определение текущего направления полета (направления вектора скорости) КА, необходимое для обеспечения контроля различия значений угла γ на моменты выполнения снимков, может быть осуществлено, например, по направлению видимого с КА бега местности подстилающей поверхности.
В результате выполнения съемки получают, например, 3 снимка с центральными точками Fi, i=1,3.
По ортотрансформированным снимкам определяют географические координаты точек поверхности планеты, соответствующих задаваемым точкам снимка, и определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры.
Например, по ортотрансформированным снимкам определяют географические координаты точек поверхности планеты, соответствующих центральному пикселю снимка и пикселям, лежащим на вписанной в снимок окружности, и определяют наборы Hi, i=1,3 точек в пространстве Kij, j=1,2, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины кругового конуса с углом раствора, равным углу поля зрения съемочной аппаратуры, лучи конуса проходят через определенные точки поверхности планеты, соответствующие пикселям, лежащим на вписанной в снимок окружности, а ось конуса проходит через определенную точку поверхности планеты, соответствующую центральному пикселю снимка.
Далее определяют комбинацию D точек, в которую входят по одной точке из определенных для снимков упомянутых наборов Hi, i=1,3 точек, через которые проходят линии, составляющие между собой углы, сумма которых минимальна:

где βnkp - сумма углов между тремя линиями: линией, проходящей через точки K1n, K2k; линией, проходящей через точки K1n, K3p; линией проходящей через точки K2k, K3p.
Точки данной комбинации D точек принимают за местоположения КА на моменты выполнения снимков.
Через задаваемое время (через интервал времени более задаваемой продолжительности ΔР) повторяют вышеописанные действия, начиная с выполнения съемки подстилающей поверхности.
А именно: в течение заданного интервала времени (в течение интервала времени менее задаваемой продолжительности ΔT) и при нахождении КА над областью подстилающей поверхности с измеренными значениями пространственных координат точек местности выполняют съемку с КА подстилающей поверхности при последовательно меняющихся знаках изменения угла γ на моменты выполнения снимков. В результате выполнения съемки получают снимки с центральными точками Fi*, i=1,3.
По ортотрансформированным снимкам определяют географические координаты точек поверхности планеты, соответствующих задаваемым точкам снимка, и определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры.
Например, по ортотрансформированным снимкам с центральными точками Fi*, i=1,3 определяют географические координаты точек поверхности планеты, соответствующих центральному пикселю снимка и пикселям, лежащим на вписанной в снимок окружности, и определяют наборы Hi*, i=1,3 точек в пространстве Kij*, j=1,2, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины кругового конуса с углом раствора, равным углу поля зрения съемочной аппаратуры, лучи конуса проходят через определенные точки поверхности планеты, соответствующие пикселям, лежащим на вписанной в снимок окружности, а ось конуса проходит через определенную точку поверхности планеты, соответствующую центральному пикселю снимка.
Определяют комбинацию D* точек, в которую входят по одной точке из определенных для снимков с центральными точками Fi*, i=1,3 упомянутых наборов Hi*, i=1,3 точек, через которые проходят линии, составляющие между собой углы, сумма которых минимальна:

где βnkp* - сумма углов между тремя линиями: линией, проходящей через точки K1n*, K2k*; линией, проходящей через точки K1n*, K3p*; линией проходящей через точки K2k*, K3p*.
Точки данной комбинации D* точек принимают за местоположения КА на моменты выполнения снимков с центральными точками Fi*, i=1,3.
Определяемую текущую орбиту КА определяют как значения времени и значения координат местоположений КА, которые удовлетворяют уравнениям движения КА в связанной с планетой системе координат и составляют линию, проходящую с задаваемой точностью в моменты выполнения снимков через точки найденных упомянутых комбинаций точек D и D*.
В предлагаемом способе условие выполнения съемки подстилающей поверхности при последовательно меняющихся знаках изменения угла γ на моменты выполнения снимков гарантирует единственность получения искомых точек съемки - единственность каждой искомой комбинации D и D* точек, определяемой соотношениями, соответственно, (1) и (2) и удовлетворяющей двум требованиям:
- содержит по одной точке из наборов точек Hi, i=1,3 или Hi*, i=1,3;
- линии, проходящие через точки данной комбинации точек, составляют между собой углы, сумма которых минимальна.
Наиболее явно указанная многозначность определения положения точки съемки S проявляется при отличных от 90° значениях указанного угла γ.
В предлагаемом способе условие выполнения съемки подстилающей поверхности в течение интервалов времени менее задаваемой продолжительности ΔT обеспечивает необходимый уровень близости точек съемки, который гарантирует, что линии, проходящие через искомые точки, из которых производилась съемка, составляют между собой углы, сумма которых заведомо меньше суммы углов между линиями любой другой комбинации линий, проходящих через три точки, одна из которых водит в один, вторая - в другой, а третья - в оставшийся (третий) из наборов точек Hi, i=1,3 и Hi*, i=1,3. Величина ΔT может быть рассчитана в зависимости от прогнозируемой скорости полета КА и прогнозируемого отличия значений углов γ, при которых будет выполняться съемка.
В предлагаемом способе условие повторения через задаваемое время (через интервал времени более задаваемой продолжительности ΔР) описанных действий начиная с выполнения съемки подстилающей поверхности в течение заданного интервала времени (в течение интервала времени менее задаваемой продолжительности ΔT) обеспечивает необходимый уровень удаленности вдоль орбиты искомых точек съемки, который гарантирует, что найденная описанная комбинация D точек местоположений КА на моменты выполнения первой серии снимков удалена от найденной описанной комбинации D* точек местоположений КА на моменты выполнения выполненной дополнительной (повторной) серии снимков на расстояние, которое достаточно для учета криволинейности искомой линии орбиты КА. Отметим, что для более точного учета указанной криволинейности искомой линии орбиты КА возможно неоднократное повторение через задаваемое время (через интервал времени более задаваемой продолжительности ΔР) описанных действий по выполнению съемки подстилающей поверхности в течение заданного интервала времени (в течение интервала времени менее задаваемой продолжительности ΔT) при описанных значениях угла γ.
К упомянутым точностям/погрешностям задания параметров съемочной аппаратуры можно отнести, например, неточность изготовления и установки объектива, несовпадение истинного фокусного расстояния с реальным (например, при номинале 800 мм, истинное значение фокусного расстояния может быть на несколько мм больше или меньше номинала), неточность установки отсчета времени в аппаратуре (например, при синхронизации времени вручную) и т.п.
Опишем технический эффект предлагаемого изобретения.
Предложенное техническое решение обеспечивает определение (уточнение) параметров текущей орбиты КА, снабженного аппаратурой для съемки подстилающей поверхности при нахождении КА вне зон траекторных/навигационных измерений, при этом предлагаемый способ не требует наличия на этапе обработки снимков априорных данных о движении КА (данных о положении орбиты КА или другой баллистической / навигационной информации об изменяющемся во времени местоположении КА). В качестве планеты обращения КА может рассматриваться как Земля, так и Луна и Марс.
Достигаемый технический результат существенно расширяет функциональные возможности решения задачи определения орбиты КА.
Особенно важность указанного положительного эффекта проявляется при применении предлагаемого технического решения в условиях, когда возможности использования штатных технических средств траекторных/навигационных измерений орбиты КА ограничены или недоступны.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
Способ определения орбиты космического аппарата с аппаратурой для съемки подстилающей поверхности, включающий определение параметров, характеризующих орбиту космического аппарата, и прогнозирование по ним значений времени и координат местоположений космического аппарата, отличающийся тем, что в течение заданного интервала времени и при нахождении космического аппарата над областью подстилающей поверхности с измеренными значениями пространственных координат точек местности выполняют съемку с космического аппарата подстилающей поверхности при последовательно меняющих знак изменениях угла между нормалью к плоскости орбиты и проекцией оси визирования съемочной аппаратуры на плоскость, перпендикулярную вектору скорости космического аппарата, на моменты выполнения снимков, по ортотрансформированным снимкам определяют географические координаты точек поверхности планеты, соответствующих задаваемым точкам снимка, и определяют наборы точек, координаты которых с задаваемой точностью удовлетворяют уравнениям определения вершины конуса, лучи и ось которого проходят через точки поверхности планеты, соответствующие задаваемым точкам снимка, а угол раствора равен углу поля зрения съемочной аппаратуры, определяют комбинацию точек, в которую входят по одной точке из определенных наборов точек, через которые проходят линии, составляющие между собой углы, сумма которых минимальна, через задаваемое время повторяют вышеописанные действия, после чего за определяемую текущую орбиту космического аппарата принимают прогнозируемые значения координат местоположений космического аппарата, составляющие линию, проходящую с задаваемой точностью в моменты выполнения снимков через точки найденных упомянутых комбинаций точек.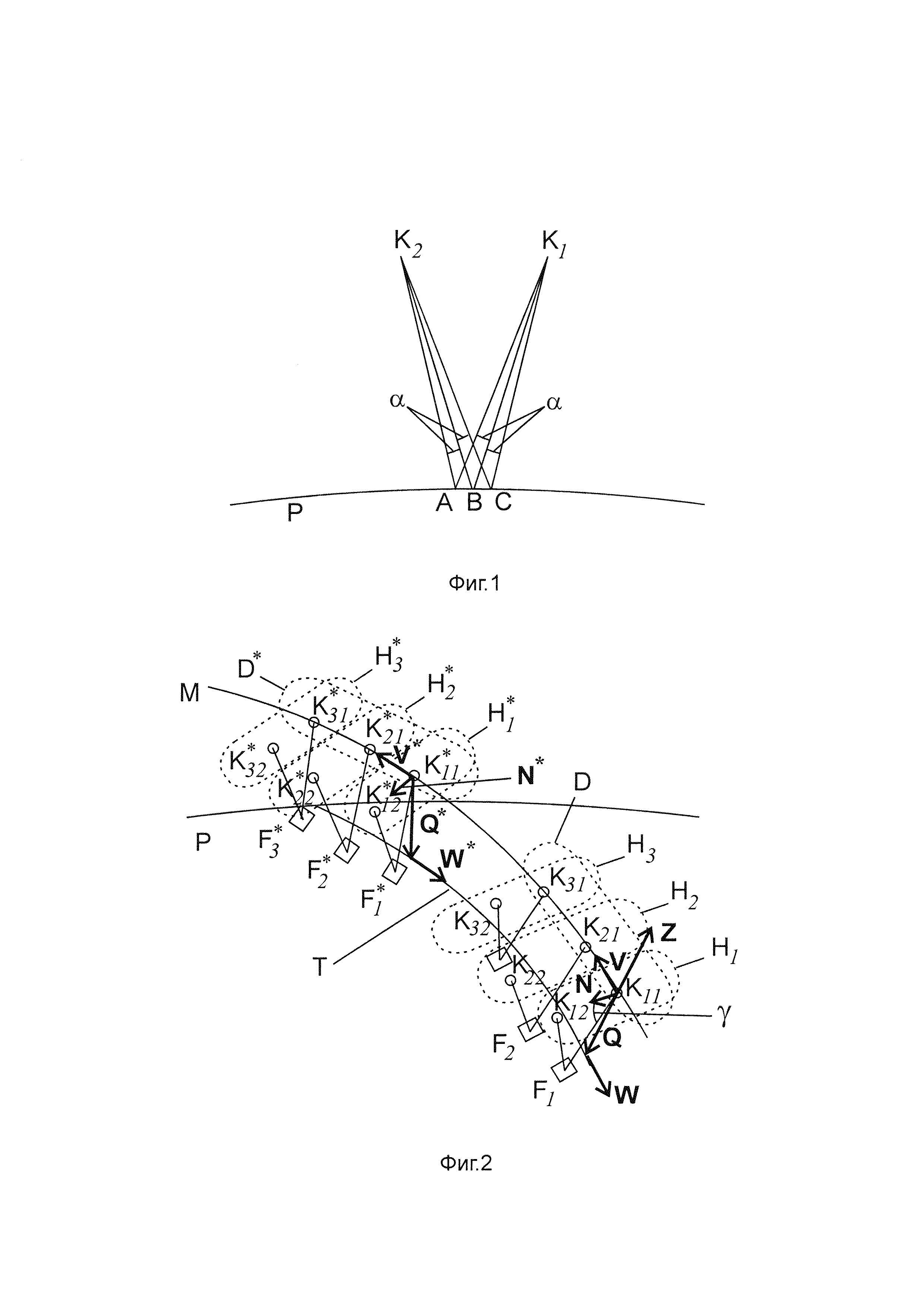
Электронасосный агрегат
Устройство деления потока жидкости
Способ оценки эффективности солнечных панелей системы электропитания космического аппарата
Система электроснабжения космического корабля ракетно-космического комплекса
Индуктивно-емкостной энергетический элемент (варианты)
Устройство управления размещенной на космическом корабле переносной аппаратурой наблюдения
Герметизированное устройство
Способ изготовления теплопроводящей прокладки для отвода тепла от электронных компонентов печатных плат
Способ управления транспортной системой при выполнении перелёта на высокоэнергетическую орбиту
Способ управления движением космического объекта при сближении с другим космическим объектом
Способ определения магнитной помехи на космическом аппарате в полете
Способ определения трехосной ориентации космического аппарата
Способ поддержания трехосной ориентации космического аппарата с силовыми гироскопами и целевой нагрузкой
Способ управления положением солнечных батарей космического аппарата и система для его осуществления
Планшет для выбора объектов наблюдения с орбитального космического аппарата
Планшет для выбора объектов наблюдения с орбитального космического аппарата
Способ определения деформации корпуса объекта преимущественно космического аппарата
Устройство для ориентирования перемещаемой на борту пилотируемого корабля аппаратуры наблюдения
Система ориентирования перемещаемой на борту пилотируемого корабля аппаратуры
Способ ориентирования перемещаемой на борту пилотируемого корабля аппаратуры

