Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области космической техники и может быть использовано на космических аппаратах (КА) для управления в режиме проведения коррекции (РПК).
Известен способ ориентации космического аппарата на высокоэллиптической орбите, при работе по целевому назначению включающий ориентацию первой оси космического аппарата на Землю путем разворотов относительно второй и третьей осей КА, ориентацию панелей солнечных батарей (СБ) на Солнце разворотом космического аппарата вокруг первой оси до совмещения второй оси КА с плоскостью Солнце - космический аппарат (объект) - Земля (СОЗ) и разворот панелей СБ вокруг оси, параллельной третьей оси КА, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце, установку вектора тяги двигателя коррекции по второй оси КА. При проведении коррекции орбиты, ориентация вектора тяги двигателя коррекции осуществляется по вектору линейной скорости КА разворотом относительно первой и третьей осей КА, при этом ориентация панелей СБ на Солнце не проводится, [Космические вехи: сборник научных трудов, посвященный 50-летию создания АО «ИСС» имени академика М.Ф. Решетнёва. - Красноярск: ИП Суховольская Ю.П., 2009. с. 132].
Представленный способ ориентации КА предполагает установку вектора тяги двигателя коррекции по второй оси КА. При проведении коррекции орбиты осуществляется совмещение второй оси КА по направлению линейной скорости КА в плоскости орбиты и удержание второй оси КА в плоскости орбиты при сохранении ориентации первой оси на Землю. Ориентация КА в режиме РПК осуществляется по информации с прибора ориентации на Землю (ПОЗ) и информации с блока измерения скорости (БИС) или только с БИС.
Описанный способ принят за прототип изобретения.
Недостатки прототипа:
1. При ориентации второй оси по вектору линейной скорости, путем разворота КА вокруг первой и третьей осей КА до совмещения второй оси с вектором линейной скорости, происходит отклонение панелей СБ от направления на Солнце, угол отклонения зависит от знака проведения коррекции орбиты. Угол разворота КА вокруг первой оси может быть от 0 до 180 градусов.
2. При установке вектора тяги двигателя коррекции по второй оси КА обычно происходит взаимодействие струи двигателя коррекции с элементами конструкции КА, таких как панели солнечных батарей и антенн. При больших габаритах антенн и панелей СБ возмущающие моменты от взаимодействия струи двигателя коррекции с конструкциями могут оказаться больше, чем моменты, создаваемые реактивными двигателями, предназначенными для парирования возмущающих моментов.
Выход из сложившейся ситуации может быть следующим.
Обычно, более свободной зоной от элементов конструкции является зона со стороны первой оси КА, которая не ориентирована на Землю. При установке вектора тяги двигателя коррекции по первой оси, противоположной от направления на Землю, возмущающие моменты от струи двигателя коррекции малы. Установка вектора тяги двигателя коррекции по первой оси и ориентация первой оси КА, в режиме проведения коррекции, по вектору линейной скорости КА предоставляет возможность ориентировать панели СБ на Солнце разворотом КА вокруг первой оси до совмещения второй оси КА с плоскостью, проходящей через вектор линейной скорости и направлением на Солнце и разворотом СБ вокруг оси, параллельной третьей оси до совмещения нормали к поверхности СБ с направлением на Солнце.
В основу настоящего изобретения положена задача создания способа ориентации КА, при котором осуществляется:
1. Уменьшение возмущающих моментов от взаимодействия струи двигателя коррекции с элементами конструкции;
2. Обеспечение ориентации панелей солнечных батарей на Солнце на всем временном интервале проведения РПК.
Поставленная задача решается следующим образом.
Способ ориентации КА на высокоэллиптической орбите, включающий развороты КА относительно его осей, ориентацию панелей солнечных батарей на Солнце путем их разворота вокруг оси, параллельной третьей оси КА, до совмещения нормали к поверхности солнечных батарей с направлением на Солнце, установку вектора тяги двигателя коррекции при проведении коррекции орбиты по вектору линейной скорости КА, отличающийся тем, что вектор тяги двигателя коррекции устанавливают по первой оси КА, ориентируемой по вектору линейной скорости КА разворотами КА вокруг его второй и третьей осей, а панели солнечных батарей ориентируют на Солнце разворотом КА относительно его первой оси до совмещения второй оси с плоскостью, проходящей через вектор линейной скорости КА и направлением на Солнце, и последующим разворотом панелей вокруг оси, параллельной третьей оси КА.
Сущность изобретения.
Рассматриваемый способ ориентации КА при проведении коррекции орбиты включает ориентацию первой оси космического аппарата по вектору линейной скорости, путем разворотов относительно второй и третьей осей КА, ориентацию панелей СБ на Солнце путем разворота КА вокруг первой оси до совмещения с плоскостью, проходящей через вектор линейной скорости космического аппарата и направление на Солнце и разворота панелей СБ относительно оси, параллельной третьей оси КА, до совмещения нормали к поверхности СБ с направлением на Солнце.
Реализация предполагаемого способа ориентации при проведении коррекции орбиты КА может проводиться на любых участках высокоэллиптической орбиты. Наиболее эффективным является способ проведения коррекции орбиты в районе перигея, так как на данном участке орбиты тяга создаваемая двигателем коррекции является наиболее эффективной в части изменения периода обращения КА, а работа КА по целевому назначению на перигейном участке не проводится. Поэтому ориентация первой оси КА по линейной скорости КА при проведении коррекции не накладывает никаких ограничений на работу КА по целевому назначению.
Для подтверждения работоспособности предлагаемого способа ориентации при проведении коррекции проводилось моделирование процессов при проведении коррекции орбиты.
Система уравнений, описывающих движение КА при моделировании, имеет вид:
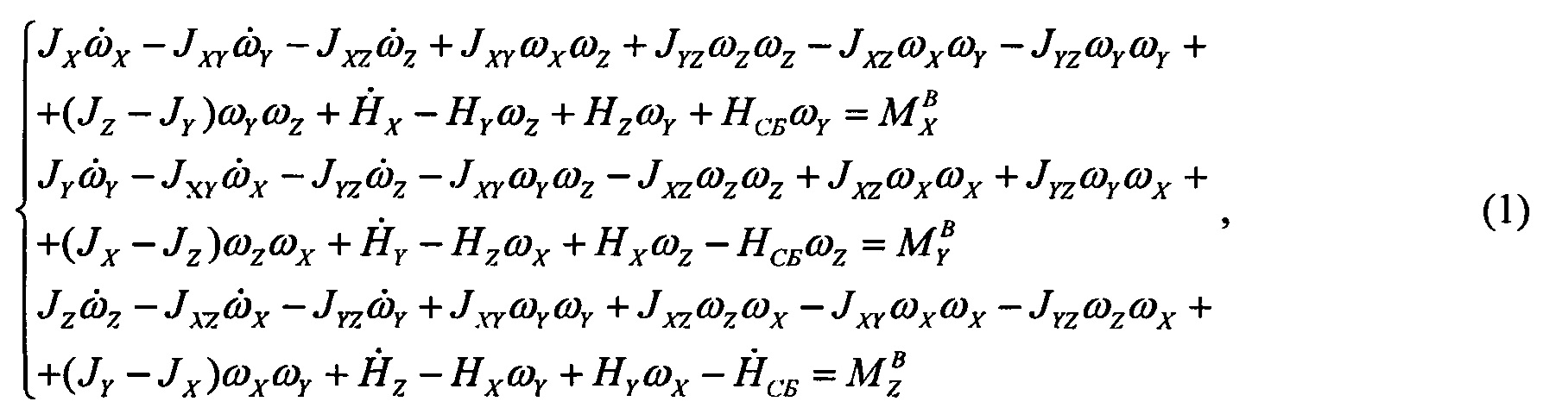
Кинематические соотношения:




Орбитальные уравнения и переменные имеют вид:



где: ОХ - первая ось КА, OY - вторая ось КА, OZ - третья ось КА;
О - центр масс космического аппарата;
HX, HY, HZ - проекции суммарного вектора кинетического момента управляющих двигателей маховиков (УДМ) на оси связанной системы координат;
JX, JY, JZ - моменты инерции КА;
JXY, JXZ, JYZ - центробежные моменты инерции КА;
К - коэффициент момента сопротивления, зависящего от величины кинетического момента УДМ по осям OX, OY, OZ, соответственно;
 ,
,  ,
,  - проекции вектора момента внешних сил на оси связанной системы координат;
- проекции вектора момента внешних сил на оси связанной системы координат;
МЭМ.Х, МЭМ.Y, МЭМ.Z - управляющий электромагнитный момент на УДМ по осям OX, OY, OZ, соответственно;
МСТ.Х, МСТ.Y, МСТ.Z - момент сухого трения на валу УДМ по осям OX, OY, OZ;
ψ, ϕ, θ - углы ориентации по каналам рыскания, крена и тангажа соответственно;


 - скорости по каналам рыскания, крена и тангажа соответственно;
- скорости по каналам рыскания, крена и тангажа соответственно;
ωX, ωY, ωZ - проекции вектора угловой скорости КА на оси связанной системы координат;


 - проекции вектора углового ускорения КА на оси связанной системы координат;
- проекции вектора углового ускорения КА на оси связанной системы координат;
cij - направляющие косинусы матрицы перехода от связанной системы координат к инерциальной;
 - производные направляющих косинусов матрицы перехода от связанной системы координат к инерциальной;
- производные направляющих косинусов матрицы перехода от связанной системы координат к инерциальной;
 - производная кинетического момента панелей СБ, обусловленная их вращением;
- производная кинетического момента панелей СБ, обусловленная их вращением;
JСБ - момент инерции панелей СБ;
ωСБ - угловая скорость вращения панелей СБ относительно оси OZ;
 - угловая орбитальная скорость;
- угловая орбитальная скорость;
Е - истинная аномалия;
μ - гравитационная постоянная;
p - фокальный параметр;
е - эксцентриситет орбиты;
RA, RП - радиусы орбиты в апогее и перигее, соответственно.
Моделирование проводилось при следующих параметрах орбиты:
- орбита высокоэллиптическая;
- аргумент широты перигея 270 градусов;
- наклонение орбиты 63 градуса;
- радиусы орбиты в апогее (RA) 46370 километров;
- радиусы орбиты в перигее (RП) 7020 километров.
Начальные условия при моделировании:
- угол между направлением на Солнце и плоскостью орбиты равен 0 градусов;
- угол между проекцией направления на Солнце на плоскость орбиты и радиус-вектором из центра Земли в точку перигея равен 90 градусов.
- истинная аномалия (Е) 223 градуса.
Параметры КА:
JX=50000 кг м2, JY=35000 кг м2, JZ=40000 кг м2, МСТ=0,002 Нм, 
 К1x=21 Нм/рад, К2х=850 Нмс/рад, К1у=20 Нм/рад, К2у=800 Нмс/рад, К1z=20 Нм/рад, К2z=800 Нмс/рад, знак коррекции - отрицательный.
К1x=21 Нм/рад, К2х=850 Нмс/рад, К1у=20 Нм/рад, К2у=800 Нмс/рад, К1z=20 Нм/рад, К2z=800 Нмс/рад, знак коррекции - отрицательный.
Был выбран 3-х часовой вариант проведения режима коррекции: 60 минут на совмещение оси ОХ КА с вектором линейной скорости, 60 мин на выдачу импульса коррекции и 60 минут на восстановление ориентации оси ОХ на Землю. РПК включается за 90 минут до прохождения точки перигея, выключение РПК происходит через 30 минут после прохождения точки перигея. Середина интервала на выдачу импульса коррекции находится в точке перигея.
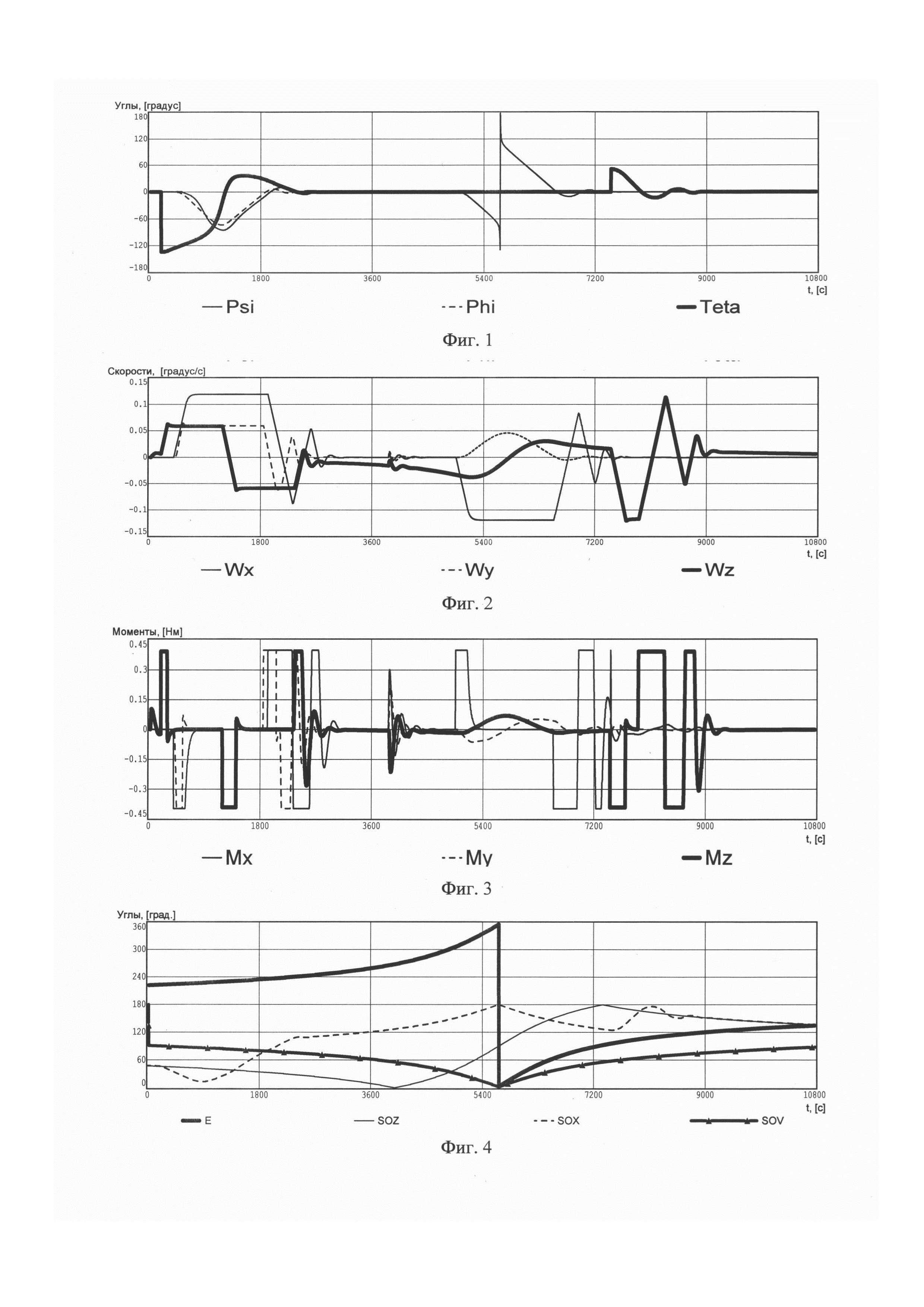
На фиг. 1-6 представлен 3-х часовой вариант моделирования проведения режима коррекции.
На фиг. 1 представлены углы ориентации КА от времени, где:
Psi, Phi, Teta - углы ориентации по каналам OX, OY и OZ соответственно;
ОХ - первая ось КА, OY - вторая ось КА, OZ - третья ось КА;
О - центр масс космического аппарата;
t - время.
На фиг. 2 представлены скорости КА по каналам ориентации от времени, где:
WX, WY, WZ - скорость изменения углов по каналам OX, OY и OZ соответственно;
ОХ - первая ось КА, OY - вторая ось КА, OZ - третья ось КА;
О - центр масс космического аппарата;
t - время.
На фиг. 3 представлены управляющие моменты КА по каналам ориентации от времени, где:
Мх, My, Mz - сформированный управляющий момент по каналам OX, OY и OZ;
ОХ - первая ось КА, OY - вторая ось КА, OZ - третья ось КА;
О - центр масс космического аппарата;
t - время.
На фиг. 4 представлены изменения углов КА по каналам ориентации от времени, где:
Е - истинная аномалия;
SOZ - угол Солнце - космический аппарат - Земля;
SOX - угол между осью +ОХ и направлением на Солнце;
SOV - угол между вектором линейной скорости и направлением на Солнце;
ОХ - первая ось КА;
О - центр масс космического аппарата;
t - время.
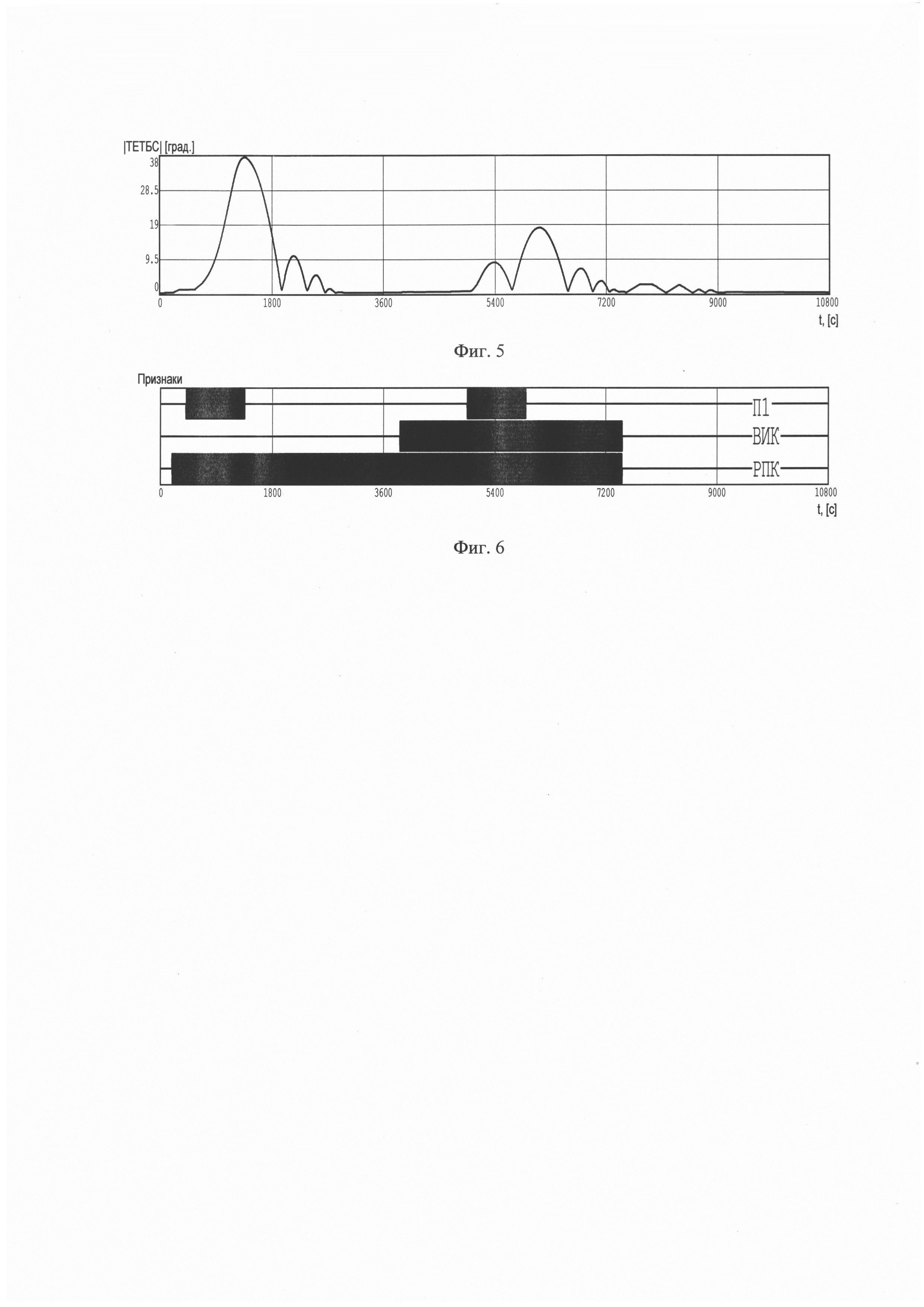
На фиг. 5 представлена ошибка ориентации нормали панелей БС на Солнце, где:
ТЕТБС - угол между нормалью к активной поверхности панелей СБ и направлением на Солнце;
t - время.
На фиг. 6 представлено формирование признаков КА по времени, где:
П1 - признак упреждающего разворота;
ВИК - признак выдачи импульса коррекции орбиты;
РПК - признак включения режима проведения коррекции;
t - время.
На фиг. 1 в начальный момент времени t=0 с. и до t=170 с. КА находится в режиме ориентацию на Землю, управляющие углы по каналам ориентации вычисляются в солнечно-земной системе координат, угол Psi показывает отклонение плоскости XOY КА от плоскости СОЗ, Phi и Teta - углы отклонения оси ОХ КА от местной вертикали (направления на Землю).
В момент времени t=170 с. происходит включение режима проведения коррекции, выставляется признак РПК, соответственно меняется формирование управляющих углов Psi, Phi, Teta. Угол Psi теперь показывает угол между проекцией направления на Солнце на плоскость YOZ и осью OY, а углы Phi и Teta показывают отклонение оси ОХ КА от направления вектора линейной скорости КА. На момент включения РПК из фиг. 1 видно, что угол Teta составляет 130 градусов, это соответствует углу отклонения оси ОХ от вектора линейной скорости. Для приведения оси ОХ к вектору линейной скорости формируются управляющие моменты Мх, My, Mz по трем каналам ориентации КА. В момент включения РПК и приведения оси ОХ КА к вектору линейной скорости, угол SOX стремится к нулю, для удержания плоскости XOY в направлении Солнца, в момент времени t=400 с. формируется признак П1, происходит набор поисковых скоростей Wx, Wy и разворот КА вокруг оси ОХ. Формирование признака П1, а также ограничение поисковых скоростей относительно осей OY и OZ, позволяет уменьшить погрешность ориентации панелей СБ на Солнце (параметр ТЕТБС). На фиг. 5 видно, что значение ТЕТБС не превышает 40 градусов. Приведение оси ОХ по вектору линейной скорости завершается в момент t=3000 с.
После переходного процесса за 30 минут до прохождения точки перигея формируется ВИК, при моделировании формируются возмущающие моменты от двигателя коррекции t=3920 с. Парирования возмущающих моментов на цикле управления осуществляется реактивными двигателями, возмущающий момент становится равен импульсу разгрузки, в связи с этим угол ориентации практически не меняется. Выдача импульса коррекции завершается спустя 30 минут после прохождения точки перигея.
При приближении к точке перигея Е=360 градусов при выбранных параметрах моделирования, угол между вектором линейной скорости (оси минус ОХ) и направлением на Солнце стремится к нулю, для уменьшения погрешности ориентации панелей СБ на Солнце до точки перигея формируется признак П1, происходит набор поисковой скорости и разворот КА вокруг оси ОХ. Разворот КА вокруг оси ОХ обеспечивает ориентацию нормали к активной поверхности панелей СБ на Солнце (параметр ТЕТБС) в пределах 19 градусов.
Отключение режима РПК и восстановление ориентации на Землю формируется через 30 минут после прохождения перигейного участка орбиты. Углы Phi и Teta - показывают отклонение оси ОХ КА от местной вертикали (направления на Землю). Угол Psi показывает угол между проекцией направления на Солнце на плоскость YOZ и осью OY.
Таким образом, техническим результатом, обеспечиваемым приведенной совокупностью признаков, является обеспечение ориентации панелей СБ в режиме РПК на всем временном интервале, уменьшения воздействия возмущающих моментов действующих на КА в процессе взаимодействия струи двигателя коррекции с элементами конструкции.
Данный способ может использоваться для космических аппаратов, работающих на высокоэллиптических орбитах, например, на орбитах типа «Молния» и «Тундра».
Многофункциональная командно-штабная машина
Устройство обнаружения шумовых гидроакустических сигналов на основе квадратурного приемника
Гидроакустический способ контроля скорости потока жидких сред в трубопроводах
Транспортное средство для перевозки суперконтейнеров с разрядными и экологически опасными грузами
Импульсный источник напряжения
Способ бесстробового автоматического сопровождения подвижной цели
Способ передачи информации в сдв диапазоне
Способ роботизированного обеспечения применения высокоточного оружия
Устройство управления резервированной с выбором среднего арифметического значения выходных параметров системой
Система телеуправления подводным аппаратом
Способ изготовления статора электрической машины
Способ изготовления ротора электрической машины
Способ ориентации навигационного космического аппарата
Способ снижения интенсивности эффекта распыления материала в вакуумной камере при испытаниях электрореактивных двигателей и комплекс для его реализации
Способ ориентации космического аппарата
Способ ориентации космического аппарата
Способ уменьшения погрешности прогнозирования движения центра масс навигационного космического аппарата

