Результат интеллектуальной деятельности: ПРОГРАММИРУЕМЫЙ ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ И СПОСОБ ИЗМЕРЕНИЯ СДВИГА С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ
Вид РИД
Изобретение
Изобретение относится к контрольно-измерительной технике, а именно к датчикам линейного перемещения элементов конструкции различных механизмов и узлов, в том числе станков с ЧПУ, узлов роботов-манипуляторов, а так же к медицинской технике.
В настоящее время широко известны и успешно применяются устройства и методы оптической регистрации перемещений, основанные на определении разницы между текущим кадром (изображением), полученным с оптического детектора, и опорным кадром, хранящимся в памяти регистрирующего устройства. Такие методы регистрации перемещений применяются в промышленном оборудовании в датчиках линейных перемещений, а также широко используются в компьютерной технике в указывающих устройствах (манипулятор типа «мышь» с оптическим датчиком).
Считывающее устройство оптического датчика перемещения описано в патенте US 4751505 А. Изображение рабочей поверхности, подсвеченное источником света, через фокусирующую линзу поступает на матрицу фотодетекторов, встроенную в интегральную схему. В патенте США US 005644139 А описан способ определения перемещений оптического датчика относительно сканируемого объекта. В патенте RU№2328768 С1 предложен способ повышения разрешающей способности оптического датчика перемещения за счет устранения компонентов изображения с пространственной длиной волны меньше удвоенного размера оптической ячейки фотодетектора.
Наиболее близким к заявляемому изобретению является патент США US 006433780 В1, в котором описаны конструкция и способ определения сдвига оптической мыши, содержащей осветитель с фокусирующей линзой для подсветки рабочей поверхности, изображение которой через вторую фокусирующую линзу поступает на матрицу фотоприемников, встроенную в интегральную микросхему. Состояние матрицы циклически считывается, и производится расчет корреляционной функции между полученным кадром и опорным кадром. В том случае, если функция имеет выраженный минимум, его координаты характеризуют перемещение в плоскости.
Однако все известные способы не лишены недостатка, состоящего в накоплении ошибки при смене опорного кадра в случае отсутствия выраженного минимума корреляционной функции между текущим и опорным кадрами, что негативно сказывается на суммарной погрешности измерения оптического датчика при увеличении длины измеряемых перемещений. Таким образом, для известных способов вычисления сдвига в датчиках перемещений, погрешность измерения перемещения есть функция от длины траектории перемещения.
Техническим результатом настоящего изобретения является снижение погрешности измерения сдвига.
Указанный технический результат достигается за счет того, что в известном устройстве, содержащем осветитель с фокусирующей линзой, вторую фокусирующую линзу и матрицу фотоприемников, встроенную в интегральную микросхему, предложено:
- разместить постоянное запоминающее устройство, в которое могут быть записаны (запрограммированы) шаблоны изображений (маркеры) и соответствующие им позиции датчика;
- разместить цифровой сигнальный процессор, осуществляющий сравнение каждого полученного датчиком кадра с шаблонами, хранящимися в постоянном запоминающем устройстве;
- разместить интерфейсный блок, осуществляющий передачу данных от цифрового сигнального процессора к управляющей системе и от управляющей системы в постоянное запоминающее устройство;
- при подготовке рабочей поверхности, по которой будет перемещаться датчик, автоматизированным способом нанести маркеры.
В известном способе, содержащем функции расчета корреляционной функции между опорным кадром и текущим кадром, используя известные методы машинного зрения, позволяющие выделять в анализируемом изображении существенные признаки [1], применяемые в системах машинного зрения и дополненной реальности [2], внести:
- функции сравнения получаемых на каждой итерации кадров с шаблонами изображений (маркерами), запрограммированными в постоянном запоминающем устройстве;
- функции сравнения расчетного положения датчика на основании измеренных сдвигов с положением маркера на рабочей поверхности и автокоррекции показаний;
- функции оповещения управляющей системы об обнаружении расхождений.
Проведенные патентные исследования показали, что в литературе отсутствует указание на использование вышеперечисленной совокупности отличительных признаков для снижения погрешности вычисления сдвига в датчике перемещения, что подтверждает новизну данного изобретения.
Рассмотрим более подробно суть предложенного изобретения.
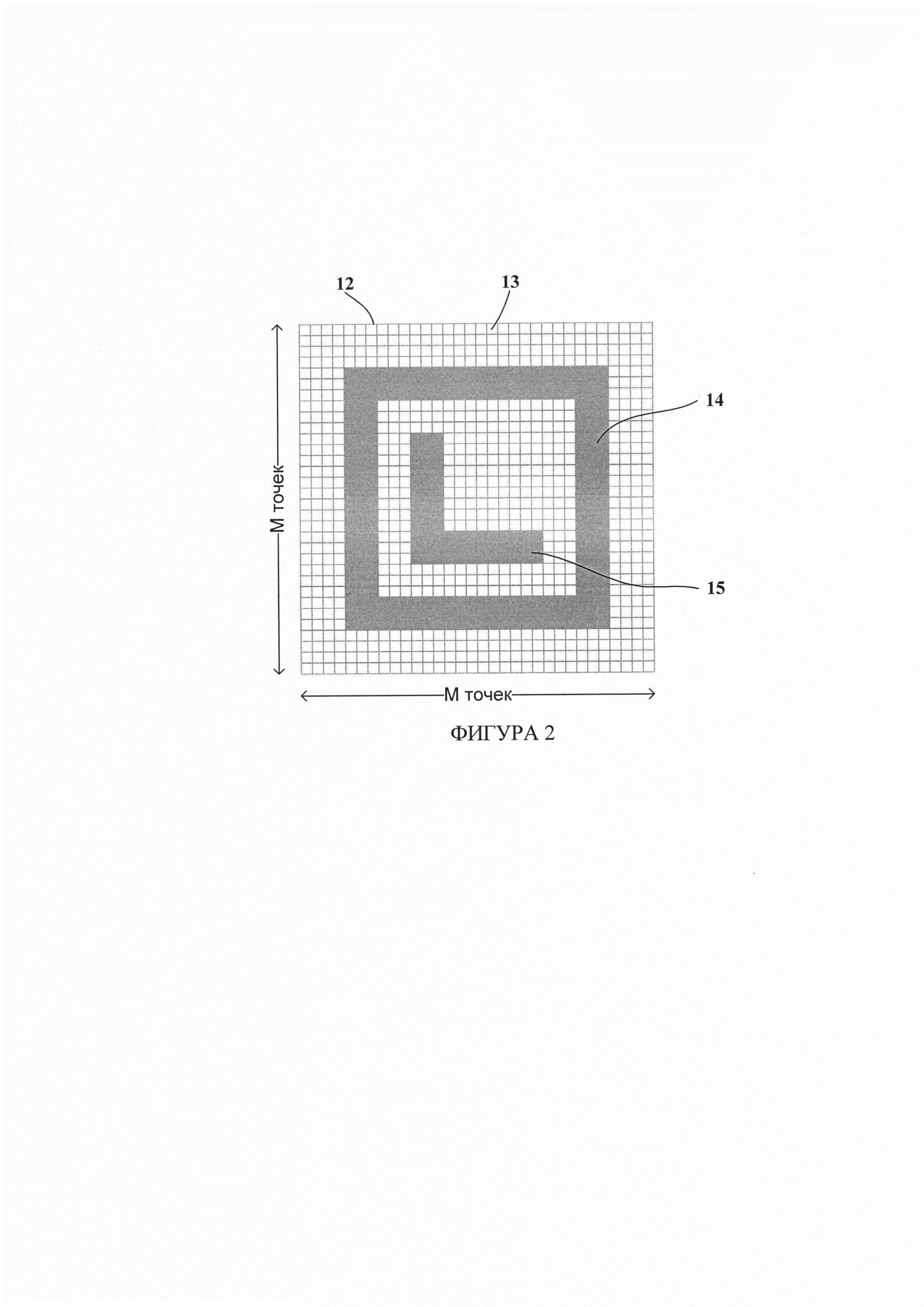
Снижение погрешности измерения сдвига достигается за счет автоматической коррекции показаний датчика в процессе работы либо принудительной калибровки перемещением датчика до ближайшего маркера. Для этого на рабочую поверхность нанесены маркеры, удовлетворяющие следующим требованиям:
- каждый маркер представляет собой точечный рисунок, выполненный без зазоров между соседними точками;
- каждый маркер имеет разрешение, равное разрешению матрицы детекторов;
- каждый маркер заключен в квадратный контур со стороной не более 80% от площади рабочей области датчика - проекции матрицы фотодетекторов датчика на рабочую поверхность;
- контур маркера должен иметь равные зазоры со всех сторон;
- толщина линий контура маркера и самого маркера, а также зазоры между линиями не должны быть менее 2 точек.
Количество возможных вариантов маркеров обусловлено разрешением матрицы фотодетекторов. Маркеры могут быть запрограммированы в постоянное запоминающее устройство датчика перемещения, а каждому из них поставлена в соответствие либо абсолютная, либо относительная позиция.
Во время работы, при каждом успешном расчете перемещения, в соответствии с направлением, изменяются внутренние счетчики ХТ и YТ датчика, где ХТ=ХТ+ΔХ - суммарное зафиксированное перемещение от предыдущего маркера по оси X, YT=YT+ΔY - суммарное зафиксированное перемещение от предыдущего маркера по оси Y. Знак сдвигов ΔХ и ΔY зависит от направления сдвига: положительный в прямом направлении и отрицательный в обратном. В том случае, если корреляционная функция не имеет выраженного минимума, и датчик не сможет определить перемещение, счетчики ХТ и YT не будут изменены. Несмотря на то, что датчик фактически изменил свое положение, минимальное значение погрешности при этом составит εX,εY≥±L, где L - длина стороны проекции фото детектора на рабочую поверхность. В том случае, если в ходе измерений значение накопленной погрешности εХ или εY превысит установленный порог НХ или НY, управляющей системе будет выдана индикация низкой достоверности показаний датчика и необходимости калибровки.
Калибровка осуществляется либо в процессе работы датчика при прохождении над маркером, либо в принудительном порядке. При прохождении над маркером производится автоматическая коррекция абсолютной позиции датчика относительно некоторой точки отсчета, установленной в системе координат датчика. В качестве точки отсчета может быть использована также одна из меток. Маркеры и соответствующие им позиции являются программируемыми, в соответствие каждому маркеру может быть установлена:
- абсолютная позиция;
- промежуточная позиция.
Перечень графических материалов, иллюстрирующих заявляемое изобретение.
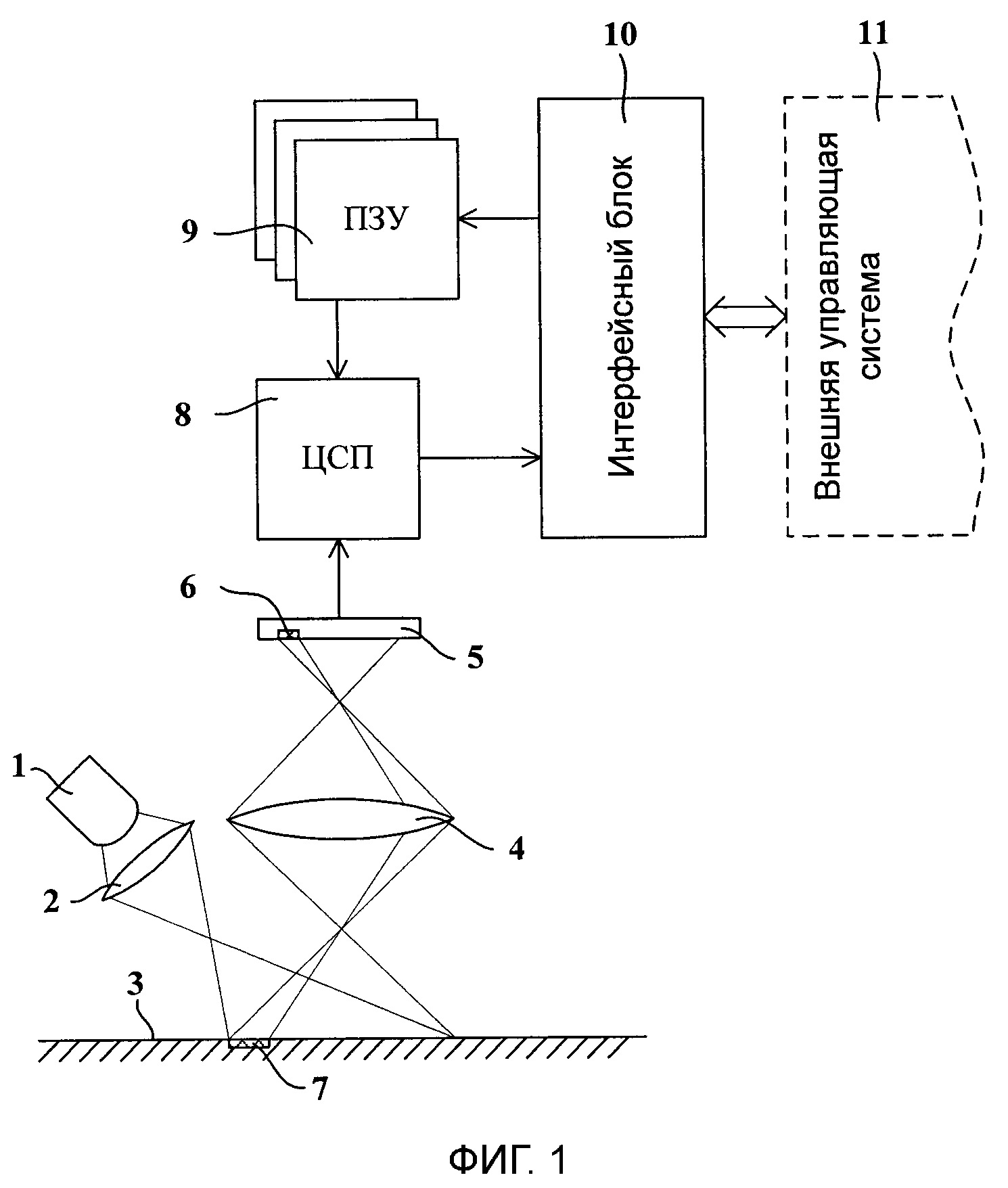
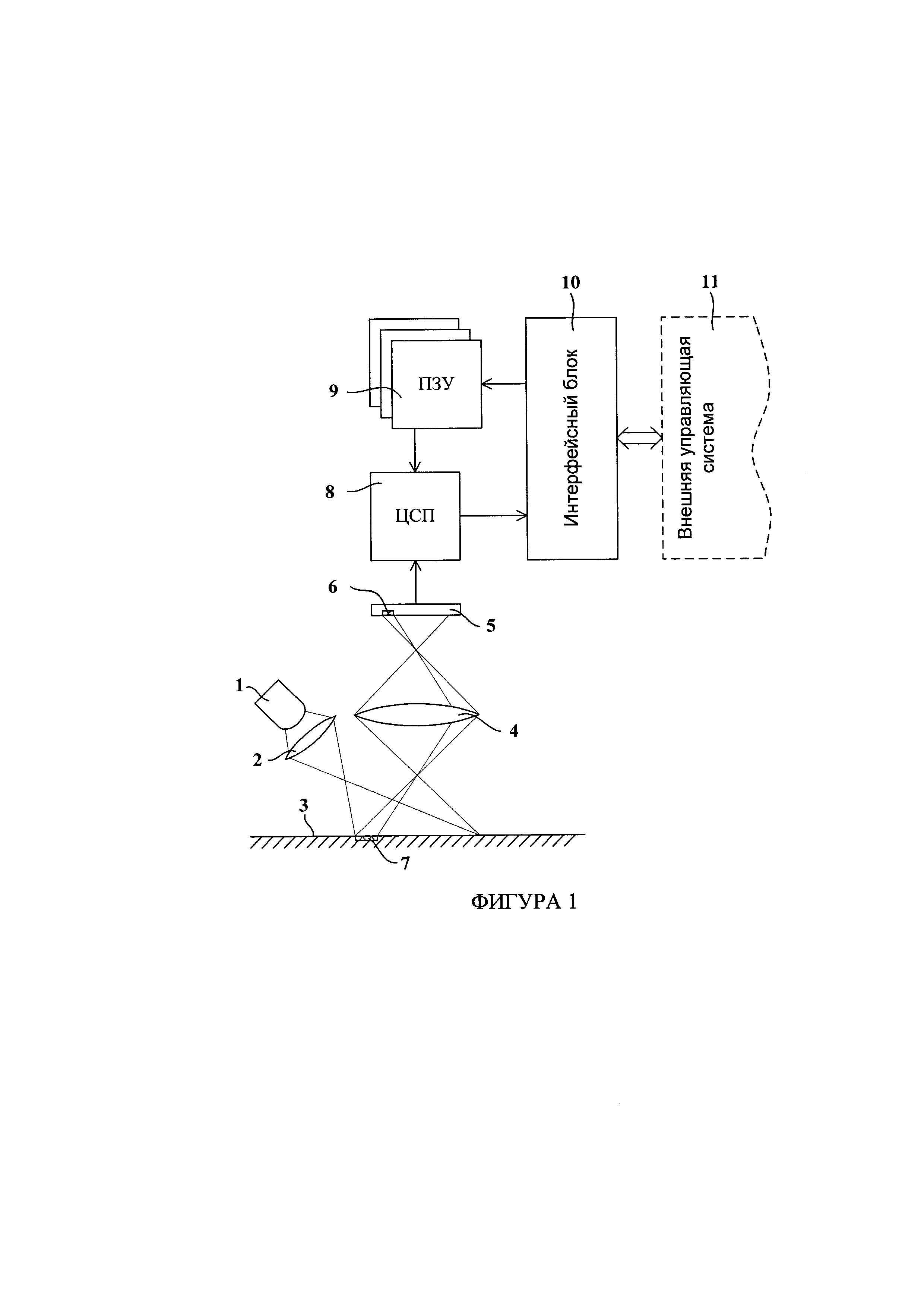
- Фиг. 1 Структурная схема программируемого датчика перемещения с автоматической коррекцией.
- Фиг. 2 Примеры меток.
- Фиг. 3 Блок-схема способа вычисления сдвига с функцией определения контура маркера.
- Фиг. 4 Блок-схема способа автоматической коррекции накопленной погрешности.
На фиг. 1 показаны осветитель 1 с фокусирующей линзой 2, которые обеспечивают засветку области рабочей поверхности 3. Свет, отраженный от рабочей поверхности 3, через вторую фокусирующую линзу 4 поступает на матрицу 5 фотодетекторов 6. Каждый фотодетектор 6 матрицы 5 имеет проекцию 7 с размерами L×L на рабочую поверхность. Длина стороны проекции 7 (L) является разрешающей способностью датчика. Состояние матрицы фотодетекторов 5 считывается цифровым сигнальным процессором 8, выполняющим расчет корреляционной функции, нахождение ее минимума (сдвига), а также функции выделения меток и их распознавания. Шаблоны меток хранятся в постоянном запоминающем устройстве 9 и могут быть считаны или перезаписаны внешней управляющей системой 11. Интерфейсный блок 10 передает рассчитанные цифровым сигнальным процессором 8 параметры сдвига во внешнюю управляющую систему 11.
На фиг. 2 показан пример маркера, представляющего собой точечный рисунок 12 размерностью М×М точек 13, которая соответствует размерности матрицы фотодетектора датчика. Точечный рисунок маркера состоит из контура маркера 14 и самого маркера 15.
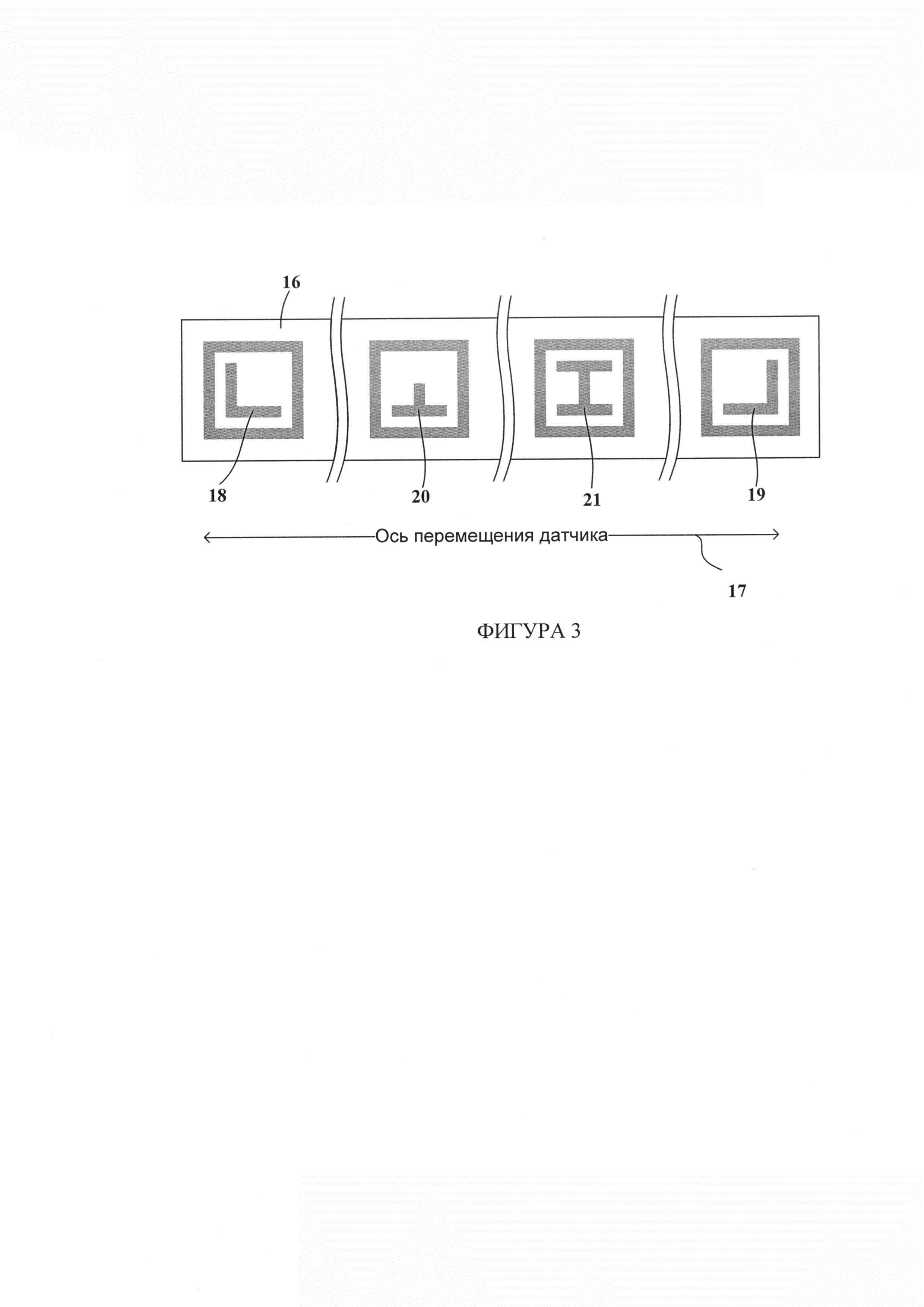
На фиг. 3 показан пример расположения маркеров на рабочей поверхности 16 при линейном перемещении датчика вдоль оси 17. На рабочей поверхности нанесены маркеры абсолютной позиции 18 и 19, соответствующие началу и концу траектории соответственно, а также маркеры относительной позиции 20 и 21. Разница между маркерами абсолютной позиции и промежуточной позиции состоит в том, что для маркеров 18 и 19 их координаты в плоскости (в данном случае линейные) жестко заданы, а для промежуточных маркеров действует правило: промежуточный маркер N равноудален от любого другого промежуточного маркера такого же шаблона на расстояние SN-N. Соответствие между шаблоном маркера и его позицией (абсолютной или относительной) может быть установлено произвольно при программировании датчика.
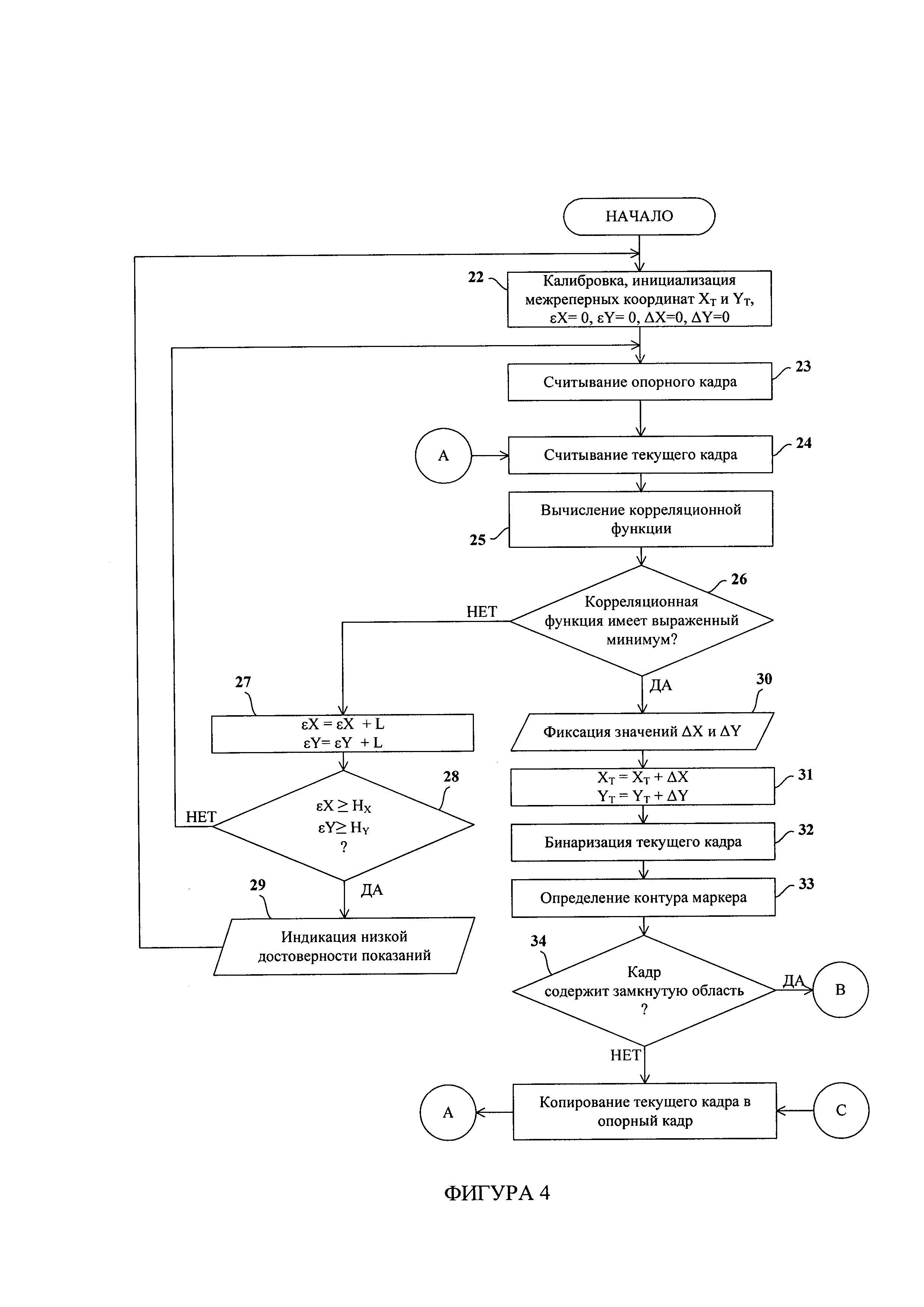
На фиг. 4 представлена блок-схема предлагаемого способа определения сдвига. В начале работы датчика должна быть выполнена процедура 22 начальной калибровки и инициализации межреперных координат. Процедура заключается в установке датчика на место одного из маркеров с абсолютной позицией, при этом сбрасываются встроенные интегрирующие счетчики погрешности εХ=0, εY=0 и сдвига ΔХ=0, ΔY=0, а также текущие координаты датчика ХТ и YT. После инициализации выполняется процесс считывания опорного кадра 23 и текущего кадра 24. Для обоих кадров производится вычисление корреляционной функции 25. Необходимым условием определения сдвига является наличие выраженного минимума корреляционной функции, определяемое в блоке 26. В том случае, если корреляционная функция не имеет выраженного минимума, выполняется наращивание интегрирующих счетчиков погрешности εХ и εY 27, при этом величина погрешности составляет не менее |L|, где L - длина стороны проекции фотодетектора на рабочую поверхность. Значения величин εХ и εY являются оценочными, но позволяют прогнозировать суммарную погрешность, накопленную с момента последнего прохода маркера. Если при сравнении 28 прогнозируемое значение погрешности выше установленных порогов НX и НY, осуществляется индикация внешней управляющей системе о низкой достоверности показаний датчика 29, на основании чего система может принять решение о необходимости принудительной калибровки датчика по процедуре 22. Если значение интегрирующих счетчиков погрешности не выходит за пределы установленных порогов, осуществляется повторное считывание опорного кадра 23.
Если корреляционная функция имеет выраженный минимум, то фиксируются значения сдвига ΔХ и ΔY как координаты этого минимума 30. На величину сдвига изменяется значение текущих координат датчика 31, при этом знак сдвига обусловлен направлением перемещения датчика и может быть как положительным (в прямом направлении), так и отрицательным (в обратном направлении).
Операция 32 осуществляет приведение изображения с матрицы фотодетекторов к монохромному представлению, что необходимо для определения контура маркера процессом 33. Если при выполнении проверки 34 определяется наличие в обработанном кадре замкнутой области, характерной для рамки маркера (признак наличия маркера в кадре), то осуществляется переход на процедуру обработки маркера. Если рамка маркера не обнаружена, то выполняется замена 35 опорного кадра текущим и переход на начало следующей итерации определения сдвига на блок 24.
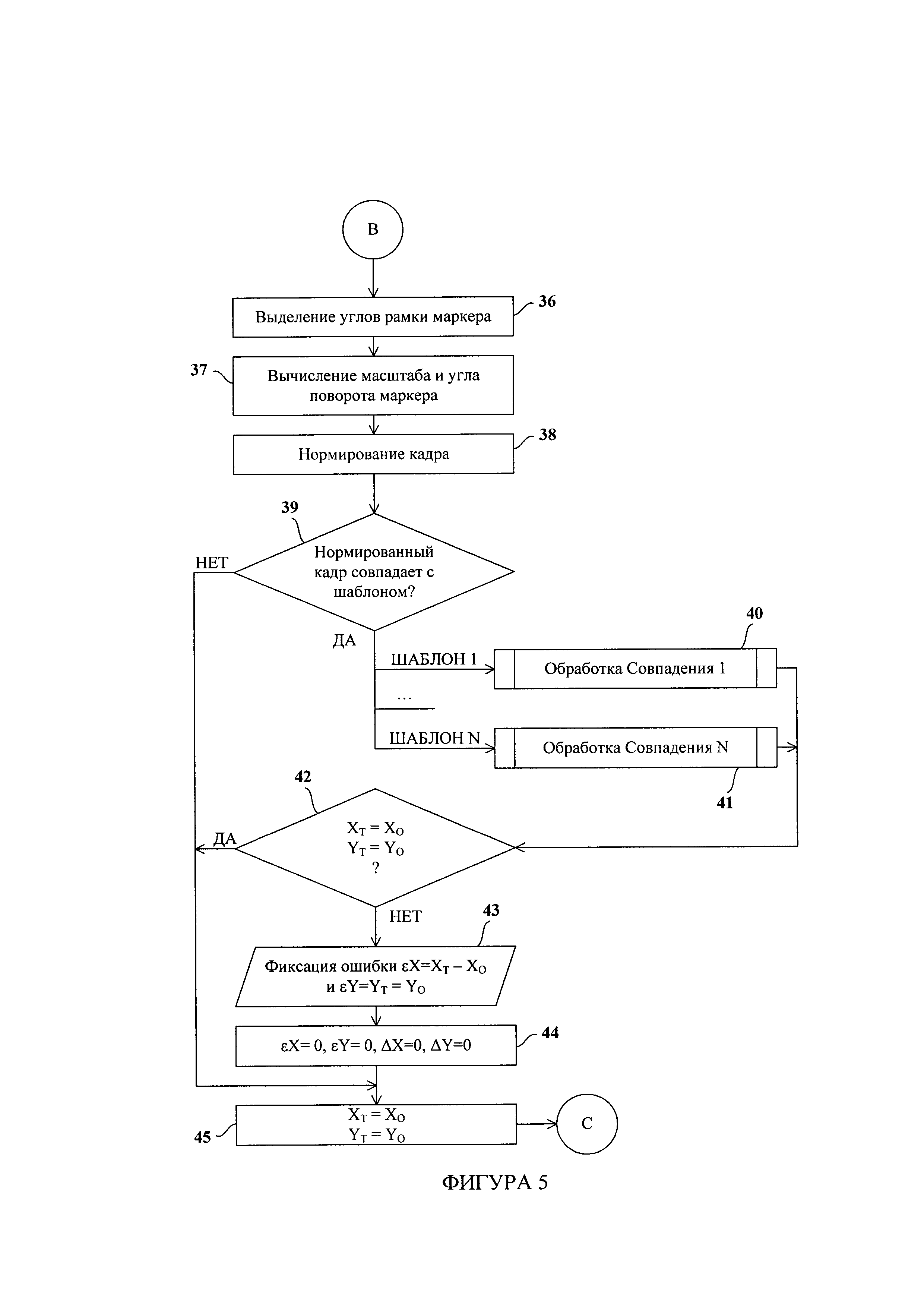
Если в операции 34 поиск рамки маркера завершился успешно, то применяется способ сравнения маркера с шаблоном, описанный на фиг. 5. В блоке 36 выполняется процедура поиска углов рамки маркера с использованием известных алгоритмов, после чего вычисляется масштаб и угол поворота маркера 37. При этом масштаб, отличный от 1, и угол поворота, отличный от 0°, свидетельствуют о нарушениях в механической системе объекта измерения. После нормирования кадра 38, которое заключается в приведении ориентации и размера маркера на полученном кадре к размерам шаблонов маркеров, содержащихся в постоянном запоминающем устройстве датчика, выполняется операция 39 поиска совпадения маркера в кадре с шаблоном. При совпадении маркера с шаблоном выполняются соответствующие процедуры 40…41, которые могут быть дополнительно запрограммированы в датчик для каждого из маркеров. При нахождении маркера проверяется соответствие текущей позиции датчика 42, рассчитанной по способу на фиг. 4 и позиции, соответствующей маркеру. При несовпадении фиксируется ошибка εХ=ХТ-ХO, εY=YT-YO. После фиксации ошибки значения счетчиков сбрасываются операцией 44, а текущие координаты датчика приводятся в соответствие с позицией маркера процедурой 45, в чем и состоит суть способа автоматической коррекции.
Литература
1. Гонсалес Р. Цифровая обработка изображений / Р. Гонсалес, Р. Вудс - М.: Техносфера, 2005. - 1072 с.
2. Vipul P. Chauhan. Object Detection and Pose Tracking In Augmented Reality / Vipul P. Chauhan, Dr. Manish M. Kayasth. // International Journal of Science and Research (IJSR), pp. 2623-2629.