Результат интеллектуальной деятельности: СПОСОБ ПРИЦЕЛИВАНИЯ КРЫЛАТЫХ РАКЕТ НА САМОХОДНОЙ ПУСКОВОЙ УСТАНОВКЕ
Вид РИД
Изобретение
Изобретение относится к военной технике и может найти применение для прицеливания крылатых ракет (далее - КР), размещаемых на самоходной пусковой установке.
Необходимым условием выведения изделия в заданный район (расчетную точку) для последующего самонаведения КР на цель является прицеливание КР, т.е. определение начального азимутального положения осей инерциального блока (далее - ИБ) изделия относительно направления истинного меридиана, до начала проведения режима предстартовой подготовки КР.
Погрешность прицеливания КР складывается из целого ряда погрешностей, с которыми изготовлены КР, пусковая установка (далее - ПУ) и др. Например, при установке КР на самоходной пусковой установке (СПУ) погрешность прицеливания зависит от погрешности положения ИБ относительно внешних узлов КР, стыкуемых с ПУ, погрешности установки ПУ на СПУ и погрешности установки навигационного комплекса СПУ.
В настоящее время известны способы последовательного измерения угловых рассогласований между элементами конструкции КР и СПУ в процессе их изготовления и ближайшим аналогом является способ прицеливания крылатых ракет, базирующихся на самоходной пусковой установке (патент на изобретение №2549215, заявка №2014103975 от 06.02.2014).
В существующем способе по результатам измерения взаимного положения промежуточных элементов рассчитывается величина углового рассогласования между ИБ КР и маршрутно-навигационной системой топопривязки и ориентирования (МНСТО) СПУ.
Измерения и предстартовая подготовка проводятся при горизонтальном положении элементов комплекса, входящих в точностную цепочку, а пуск проводится после перевода КР в вертикальное положение.
Существенным недостатком указанного технического решения является большое количество измерений и проведение начальной выставки ИБ КР в режиме предстартовой подготовки только в горизонтальном положении КР на СПУ, что, в свою очередь:
- снижает точность определения взаимного положения осей ИБ КР и МНСТО СПУ и требует применения специальной оснастки для каждого этапа измерений;
- усложняет технологию контроля, увеличивает время сборки КР;
- не учитывает влияние деформаций конструкции КР и шасси СПУ на взаимное положение ИБ КР и МНСТО СПУ;
- увеличивает бесполетное время работы ИБ КР в инерциальном режиме.
Технической задачей изобретения является устранение этих недостатков.
Указанная техническая задача достигается тем, что в процессе штатных электрических проверок при горизонтальном положении подъемной стрелы с ракетами и МНСТО проводят измерения углового рассогласования по крену между инерциальном блоком ракеты и МНСТО и после перевода стрелы СПУ в вертикальное стартовое положение используют результаты измерений для расчета поправки к азимутальному углу, измеренному МНСТО.
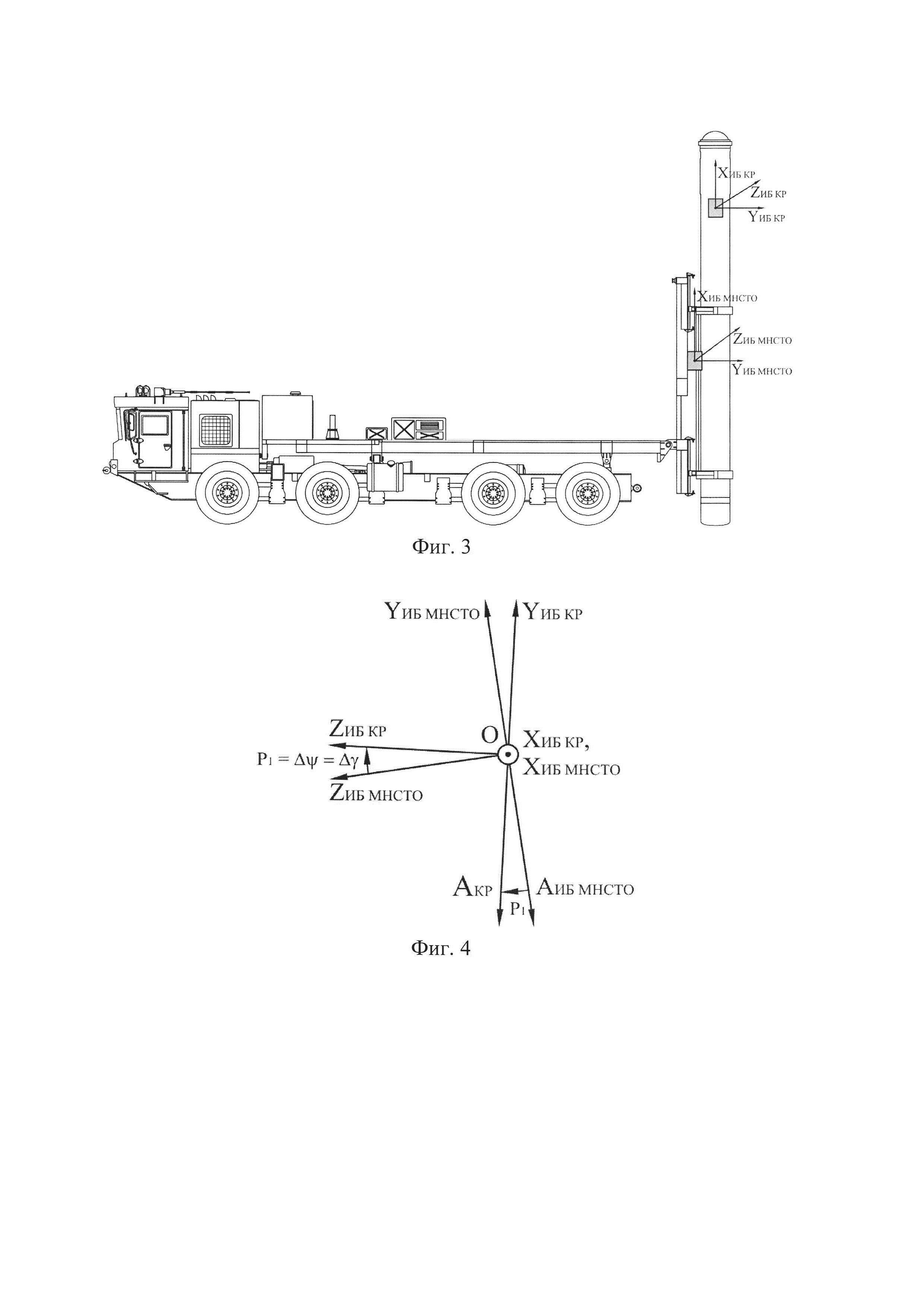
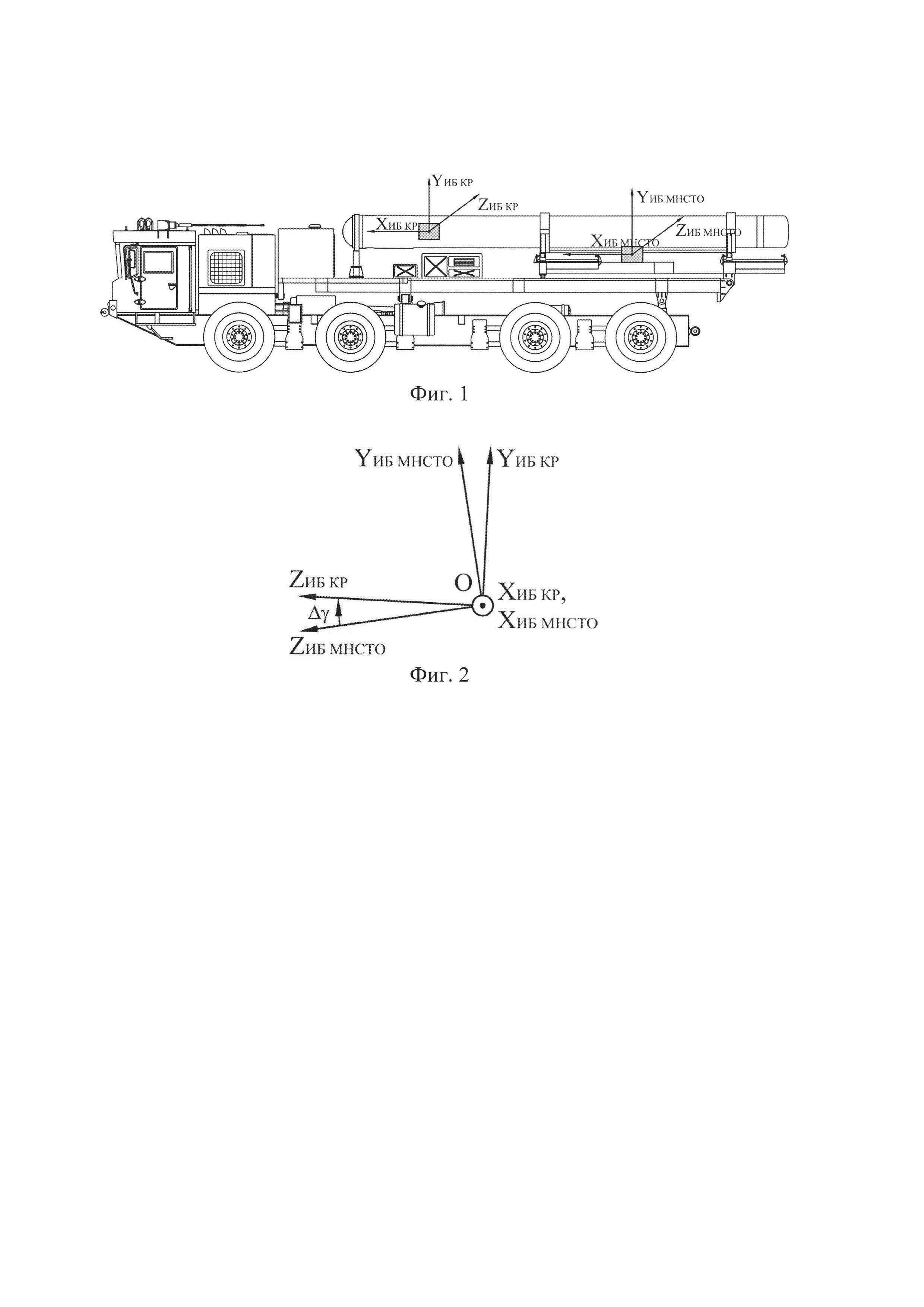
После установки КР в ракето-места на подъемной стреле СПУ, проводятся штатные электрические проверки систем ракеты при горизонтальном положении подъемной стрелы (фиг. 1). В процессе электрических проверок определяется взаимное рассогласование по крену (Δγ) вокруг продольной оси ОХ между осями чувствительности ИБ КР и МНСТО СПУ (фиг. 2). Погрешность определения углов отклонения ИБ КР и МНСТО от плоскости горизонта определяется точностными характеристиками, а именно, смещением нуля, акселерометров, применяемых в данных приборах. На сегодняшний день смещение нуля акселерометров составляет порядка 1-10-4g, что, в свою очередь, приводит к погрешности измерения отклонения от плоскости горизонта в ±20 угл. сек. Таким образом, суммарная погрешность измерения взаимного рассогласования по крену между осями чувствительности ИБ КР и МНСТО СПУ не превысит ±40 угл. сек.
Измеренное рассогласование по крену Ау между осями чувствительности ИБ КР и МНСТО СПУ записывается в постоянное запоминающее устройство из состава системы управления оружием (СУО) СПУ в виде параметра P1 и хранится до пуска этой КР.
После перевода подъемной стрелы в вертикальное положение (фиг. 3) угловое рассогласование по крену Δγ, измеренное в горизонтальном положении, является угловым рассогласованием по азимуту Δψ (фиг. 4).
Перед началом предстартовой подготовки из МНСТО в СУО СПУ передается азимутальный угол АМНСТО, измеренный МНСТО. Рассчитанный в СУО СПУ по формуле (1) азимутальный угол АКР передается в бортовую цифровую вычислительную машину КР. После этого выполняется предстартовая подготовка и пуск ракеты.

С учетом того, что точность определения азимута средствами современных МНСТО СПУ лежит в диапазоне 6-12 угл. мин, можно сделать вывод, что использование предложенного способа определения взаимного рассогласования углового положения ИБ КР и МНСТО СПУ позволит повысить точность прицеливания КР практически до точности МНСТО СПУ.
Таким образом, можно констатировать, что данное изобретение позволит:
- исключить проведение трудоемких операций поэтапного контроля систем и блоков изделия и СПУ, сократить время сборки;
- учесть влияние возможных деформаций на взаимное угловое рассогласование ИБ КР и МНСТО СПУ;
- повысить точность начальной выставки ИБ КР за счет исключения промежуточных измерений между элементами комплекса;
- повысить точность выведения КР в расчетную точку за счет сокращения бесполетного времени работы ИБ КР в инерциальном режиме.
Представляется, что данный способ найдет применение как во вновь разрабатываемых изделиях, так и при модернизации существующих изделиях.
Способ прицеливания крылатых ракет на самоходной пусковой установке - СПУ, включающий определение азимутального угла инерциального блока ракеты по известному азимутальному углу маршрутно-навигационной системы топопривязки и ориентирования - МНСТО самоходной пусковой установки, отличающийся тем, что в процессе штатных электрических проверок при горизонтальном положении подъемной стрелы с ракетами и МНСТО проводят измерения углового рассогласования по крену между инерциальном блоком ракеты и МНСТО и после перевода стрелы СПУ в вертикальное стартовое положение используют результаты измерений для расчета поправки к азимутальному углу, измеренному МНСТО.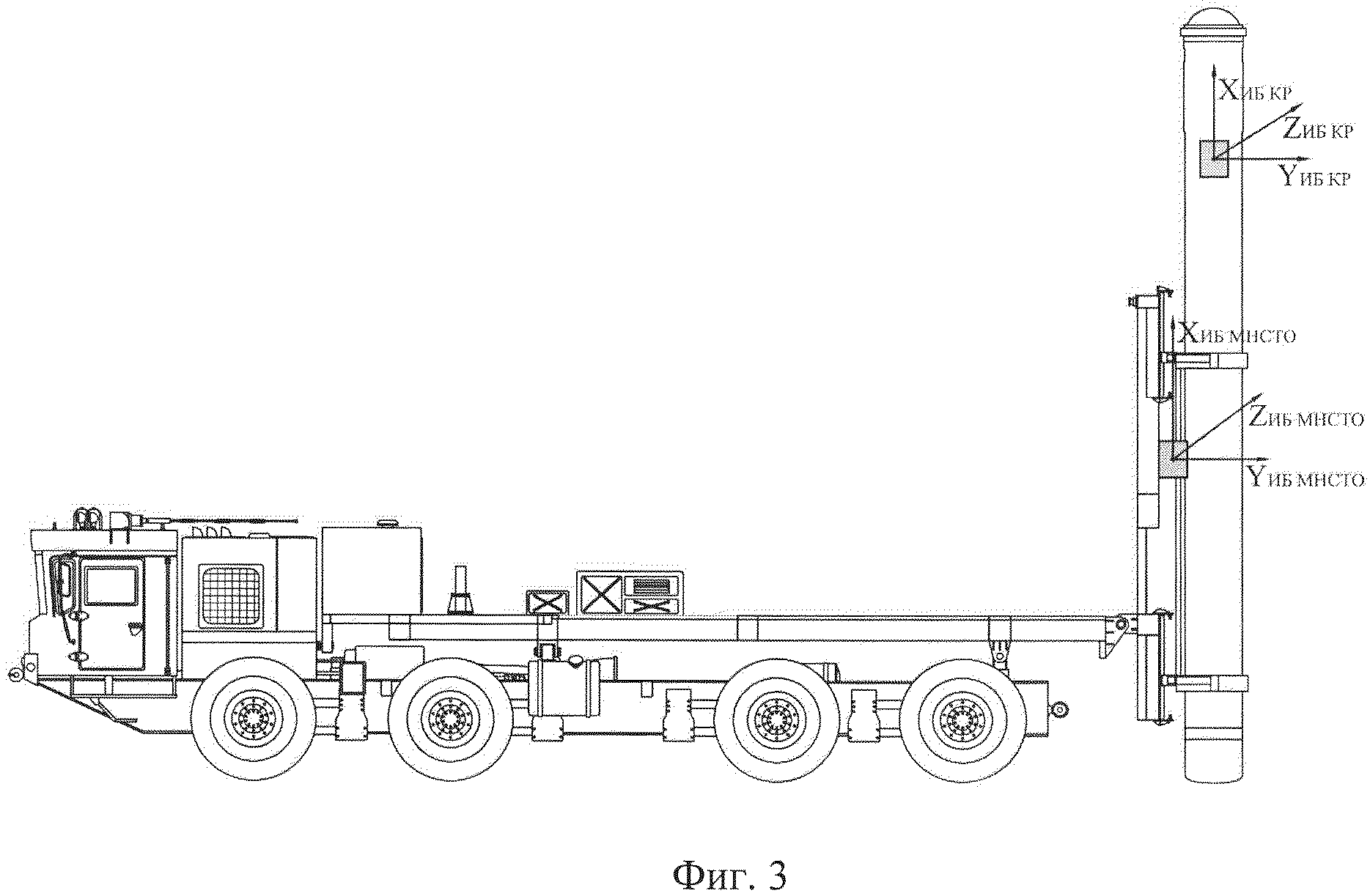
Способ формирования сигнала стабилизации продольного углового движения беспилотного летательного аппарата
Способ и устройство непрерывной сублимационной сушки жидких продуктов
Стенд тарировки телесистем
Способ выработки топлива из бака летательного аппарата
Способ крепления плоского защитного стекла иллюминатора
Тепловая защита негерметичного отсека двигательной установки летательного аппарата
Способ обеспечения теплового режима приборного отсека летательного аппарата
Композиционный материал для замещения костной ткани
Комплекс оружия для поражения наземных береговых объектов и способ его применения с подводных носителей
Способ управления автономной системой электропитания космического аппарата
Способ прицеливания крылатых ракет, базирующихся на самоходной пусковой установке
Система спутниковой навигации передвижного ракетного комплекса
Способ изменения режима полета воздушного судна в запретной зоне
Модульная многоместная корабельная пусковая установка вертикального пуска
Способ прицеливания крылатых ракет в вертикальных пусковых установках
Способ прицеливания крылатых ракет наклонного старта

