Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ И АНАЛИЗА ХАРАКТЕРНЫХ ДАННЫХ ДЛЯ ПРОДУКТОВ ПИЩЕВОЙ ПРОМЫШЛЕННОСТИ, УСТАНОВКА, СОДЕРЖАЩАЯ ТАКОЕ УСТРОЙСТВО, И СПОСОБ ОБРАБОТКИ ПРОДУКТОВ ПИЩЕВОЙ ПРОМЫШЛЕННОСТИ
Вид РИД
Изобретение
Изобретение относится к устройству, предназначенному и выполненному для получения и анализа характерных данных для продуктов пищевой промышленности и содержащему конвейер, который не имеет зазоров в плоскости транспортирования и предназначен для транспортирования отдельных продуктов в направлении Т транспортирования от загрузочного конца к разгрузочному концу, рентгеновский блок, содержащий по меньшей мере один рентгеновский источник и по меньшей мере одну рентгеновскую камеру или по меньшей мере один детектор рентгеновского излучения для получения характерных данных продуктов, причем рентгеновский источник и рентгеновская камера связаны с конвейером таким образом, что продукты могут быть направлены между указанными источником и камерой, при этом устройство также содержит блок управления, который присоединен к рентгеновскому блоку и спроектирован и выполнен с возможностью приема и анализа характерных данных продуктов, образующих первый набор данных и полученных указанным рентгеновским блоком.
Изобретение также относится к установке, предназначенной и выполненной для обработки продуктов пищевой промышленности и содержащей устройство, спроектированное и выполненное с возможностью получения и анализа характерных данных продуктов, и обрабатывающую станцию, расположенную ниже по потоку от указанного устройства в направлении Т транспортирования продуктов и содержащую конвейер для транспортирования указанных продуктов в направлении Т транспортирования от загрузочного конца к разгрузочному концу, и по меньшей мере одну оптическую камеру, с помощью которой могут быть получены характерные данные продуктов, транспортируемых на конвейере обрабатывающей станции, причем оптическая камера присоединена к блоку управления, который спроектирован и выполнен с возможностью приема и анализа характерных данных, полученных оптической камерой, при этом обрабатывающая станция также содержит режущий блок, спроектированный и выполненный с возможностью разрезания и удаления нежелательных участков продуктов и/или разделения продуктов на порции, причем указанный режущий блок присоединен к блоку управления для управления режущим блоком на основании ранее полученных характерных данных.
Кроме того, изобретение относится к способу обработки продуктов пищевой промышленности, включающему этапы: транспортирования продуктов с помощью первого конвейера от загрузочного конца к разгрузочному концу в направлении Т транспортирования; получения характерных данных, относящихся к каждому продукту на первом конвейере, с помощью рентгеновского блока, причем полученные данные, образующие первый набор данных, поступают в блок управления, который анализирует их с обеспечением определения траекторий резания для вырезания нежелательных участков и/или для разделения на порции; перемещения продуктов от первого конвейера к нижнему по потоку конвейеру, с помощью которого выполняют транспортировку продуктов в направлении Т транспортирования от загрузочного конца к разгрузочному концу; получения характерных данных, относящихся к каждому продукту на нижнем по потоку конвейере, с помощью оптической камеры, причем полученные данные, образующие четвертый набор данных, поступают в блок управления, который анализирует их с обеспечением идентификации каждого продукта; сопоставления и анализа принятых и проанализированных наборов данных с помощью блока управления для вычисления относительных местоположений каждого продукта на указанных двух конвейерах; и разрезания продуктов по указанным траекториям резания, определенным ранее и присвоенным соответствующему продукту, с помощью режущего блока, управление которым осуществляют при помощи блока управления.
Такие устройства используются, в частности, в пищевой промышленности. Для множества продуктов для их дальнейшей обработки в расположенной ниже по потоку станции, например, для сортировки, упаковки и, в частности, разрезания для удаления нежелательных участков и/или разделения на порции, важно получить характерные для продуктов данные. Получение характерных данных и информации может включать, среди прочего, получение информации о внешнем контуре, геометрической форме, наружных размерах по длине и ширине, весе и толщине, а также получение информации о дефектах, например, в виде пятен крови, костей, костных остатков, костных участков, и их местоположении внутри продукта, в дополнение к структуре ткани и т.д. Получение данных может быть выполнено путем обнаружения, определения, сканирования, регистрации и т.п. В ранее известных устройствах обобщенного типа, которые настроены исключительно на получение характерных данных продуктов, для получения указанных данных используется рентгеновский блок. Рентгеновский блок предоставляет первый набор данных для блока управления, например компьютера для обработки изображений (называемого также центральным процессором). Блок управления используется для того, чтобы исходя из этого набора данных (в примерном случае обработки продуктов резанием), например, создать траектории резания для соответствующего продукта, например, для костного участка, подлежащего вырезанию. Кроме того, набор данных, определенный рентгеновским блоком и направленный к блоку управления, может использоваться, например, для определения внешнего контура продукта, подлежащего обработке. Затем, исходя из внешнего контура и траекторий резания, создается набор данных, например, для отправки к нижней по потоку станции. Другими словами, блок управления обеспечивает рентгеновское изображение, например, в виде сообщения, содержащего информацию, касающуюся внешнего контура продукта и местоположений траекторий резания.
При использовании рентгеновского блока требуется конвейер, который является по возможности гладким, не текстурированным, не имеющим зазоров и пропускающим рентгеновское излучение, для достижения оптимального качества изображения. В частности, конвейер должен быть закрытым и не иметь зазоров в плоскости транспортирования. Это означает, что, в частности, в плоскости транспортирования конвейера, поперечной направлению Т транспортирования, зазор, который в обрабатывающих продукты устройствах, не относящихся к рассматриваемой классификации, предназначен для удерживания режущего средства, например лезвия и, в частности, режущего водяного сопла, отсутствует для обеспечения непрерывной опоры по всей поверхности для продуктов на конвейере устройства, предназначенного для получения и анализа характерных данных продуктов во время транспортировки от загрузочного конца к разгрузочному концу. В частности, анализ также включает вычисление, преобразование и т.д.
Дополнительная обработка, в частности сопоставление рентгеновского изображения, предоставляемого устройством в виде набора данных, с помощью других оптических систем, например оптической камеры нижней по потоку обрабатывающей станции, является сложной и неточной вследствие разных способов построения изображений. Другая проблема известных устройств заключается в том, что обнаружение не просто твердой ткани, например костей, костных остатков, сухожилий и т.д., в нежелательных участках, а, например, пятен крови, прожилок жира, паразитов, в продуктах и определение очертаний, контуров и т.п. при использовании рентгеновского блока может быть выполнено лишь неточно или не выполнено вообще. Другими словами, область применения существующих устройств с рентгеновским блоком и информационное содержимое рентгеновского изображения ограничены.
Эта проблема особенно актуальна для установок и способов в пищевой промышленности, где используют такие устройства вышеописанного типа. В продуктах, подлежащих обработке, например в филе птицы или, в частности, филе рыбы, с помощью таких установок и способов вышеописанного типа отдельные части, такие как внутренние кости, рыбные кости, костные участки ит.п., вырезают из продукта. Кроме того, также могут быть удалены другие дефекты, такие как пятна крови, прожилки жира и т.п. В дополнение к отрезанию нежелательных частей от продукта или их вырезанию из него, обработка продуктов также включает разделение их на порции. Для обнаружения дефектов, в частности компонентов с твердой тканью, таких как кости и т.п., предусмотрен рентгеновский блок, который используется для идентификации этих дефектов внутри продуктов. Для работы рентгеновского блока необходимо, как указано выше, наличие конвейера, в котором используется конвейерная лента, являющаяся по возможности гладкой и не текстурированной, для достижения оптимального качества изображения. Для обработки продуктов, в частности резания с помощью водоструйного блока, подходящей для использования в качестве конвейерной ленты является металлическая сетчатая лента, выдерживающая напряжения, создаваемые водоструйным блоком, однако она непригодна для рентгеновского блока. Вследствие противоречивых требований к конвейерам, известные установки и установки обобщенного типа содержат по меньшей мере два конвейера, приведенные в соответствие с указанными отдельными требованиями, а именно первый конвейер для устройства и второй конвейер для обрабатывающей станции. Это означает, что известные установки выполняют по меньшей мере одну передачу продуктов с первого конвейера на нижний по потоку конвейер. Эта передача может приводить к изменениям, смещениям, скручиваниям и т.д. в ориентации/положении продуктов на конвейере и, в частности, также к сжатию и растягиванию продуктов. Несмотря на эту проблему, после передачи на конвейер обрабатывающей станции необходимо обеспечить идентификацию и сопоставление продуктов с точки зрения их относительных местоположений на конвейерах, так, чтобы обработка продуктов, в частности их разрезание, могла быть выполнена по отдельности и надлежащим образом. Другими словами, траектории резания, определенные в отношении продукта на первом конвейере, при необходимости регулируются для этого же продукта на втором конвейере, или режущий блок должен быть при необходимости отрегулирована в соответствии с измененным местоположением/ориентацией продуктов и, соответственно, также должны быть скорректированы траектории резания.
С одной стороны, в случае известных установок и способов необходимо отслеживать продукты во время транспортировки на конвейерах с обеспечением возможности идентификации продуктов или с возможностью присвоения наборов данных, полученных блоком управления. С другой стороны, наборы данных, созданные рентгеновским блоком, должны быть подвергнуты сопоставлению с наборами данных, созданными оптической камерой обрабатывающей станции. В известных установках и способах, например, рентгеновская камера или датчик рентгеновского блока передает свои визуальные данные в блок управления в виде полос изображений. Во время процесса использования рентгеновского излучения каждый продукт транспортируют на конвейере между рентгеновским источником и рентгеновской камерой. В блоке управления полученные полосы изображений проверяются на предмет наличия продуктов. Когда на полосах изображений имеется продукт или часть продукта, при составлении полос изображений вместе получают полное рентгеновское изображение продукта в целом. Участок продукта на составленном рентгеновском изображении проверяют на наличие костей или другой твердой ткани. В запоминающем средстве блока управления собираются структуры данных с использованием координат линий, которые представляют предполагаемые кости. На основании указанных линейчатых данных оценивается костный участок, и исходя из этого вычисляется траектория резания. Эта траектория резания, также собранная из линейных сегментов, сохраняется, т.е. записывается в координатах относительно рентгеновского изображения и относительно местоположения на конвейере. Блок управления дополнительно используется для определения, в том же рентгеновском изображении, внешнего контура продукта, который также сохраняется в виде линейных сегментов. Затем создается сообщение, т.е. первый набор данных, в виде передаточного изображения, основанного на внешнем контуре и указанной или каждой траектории резания. Этот первый набор данных направляется в блок управления нижней по потоку обрабатывающей станции, который также может быть блоком управления установки.
После передачи продукта с первого конвейера на нижний по потоку конвейер обрабатывающей станции, с помощью оптической камеры получают характерные данные продуктов. Полученные данные образуют четвертый набор данных. Непосредственно после идентификации и регистрации продукта обрабатывающей станцией все первые наборы данных, полученные ранее и еще не обработанные, исследуют с помощью блока управления. Затем выбирают первый набор данных с наилучшим совпадением. Четвертый набор данных и первый набор данных сопоставляют и анализируют для идентификации продуктов и вычисления относительных местоположений каждого продукта на двух конвейерах. Нумерация набора данных не имеет логического или существенного значения, а служит исключительно для идентификации набора данных с точки зрения их происхождения.
Недостаток известных установок и способов заключается в том, что идентификация, а также сопоставление и оценка наборов данных выполняются на основании различных процессов построения изображений, а именно с помощью рентгеновского изображения (первый набор данных) в устройстве, с одной стороны, и оптического изображения (четвертый набор данных) в обрабатывающей станции, с другой стороны. Другими словами, сопоставление осуществляют путем сравнения оптического изображения от оптической камеры обрабатывающей станции с рентгеновским изображением от рентгеновской камеры устройства. С одной стороны, этот процесс сопоставления является весьма сложным вследствие различных процессов построения изображений. С другой стороны, отсутствует необходимая точность во время этого сопоставления. Другими словами, при известном сопоставлении отсутствует требуемая и необходимая точность. Другой недостаток заключается в том, что рентгеновский блок не может идентифицировать все нежелательные участки, подлежащие вырезанию, или может идентифицировать их лишь неудовлетворительно. Другими словами, для рентгеновского блока является сложной идентификация дефектов за пределами костей, костных участков и другой твердой ткани. Еще один недостаток заключается в необходимости отслеживания продуктов во время транспортировки через установку, что является дорогостоящим процессом, с одной стороны, и приводит к неточным результатам, с другой стороны.
Таким образом, целью изобретения является создание простого устройства, с помощью которого может быть создан набор данных с более полным и точным содержимым. Кроме того, цель заключается в создании усовершенствованной установки для обработки продуктов, которая обеспечивает возможность выполнения более легкой и точной идентификации, а также сопоставления и оценки полученных наборов данных. Целью также является создание соответствующего способа.
Данная цель достигается с помощью устройства, которое имеет вышеописанные особенности и в котором с одним и тем же конвейером между его загрузочным концом и разгрузочным концом связана по меньшей мере одна оптическая камера, с помощью которой, в дополнение к рентгеновскому блоку, могут быть получены характерные данные продуктов, транспортируемых на конвейере, при этом оптическая камера присоединена к блоку управления, спроектированному и выполненному с возможностью приема и анализа характерных данных, образующих второй набор данных, полученных оптической камерой. Благодаря этому варианту выполнения согласно изобретению устройство может обеспечивать более точные и, прежде всего, более значащие данные для возможной дополнительной обработки. В результате использования рентгеновского блока, с одной стороны, и по меньшей мере одной оптической камеры, с другой стороны, имеется возможность создания большего объема данных и, прежде всего, также более точных данных, которые могут быть обработаны в виде отдельных, разобщенных наборов данных или в виде набора данных, составленного из отдельных наборов данных, связанных вместе. При использовании устройства согласно изобретению становится возможной более правильная и более точная регистрация изображения, которая также, в частности, лучше отображает неравномерно распределенные уплотнения/растяжения внутри продуктов.
Предпочтительно по меньшей мере одна оптическая камера расположена над конвейером. Это означает, например, что лучи света, освещающие продукт, падают на конвейер под углом сверху или на продукт, лежащий на конвейере, так, что камера может принимать отраженные лучи света. Проще говоря, термин «над» означает, что камера и предпочтительно по меньшей мере один источник света направлены наклонно или вертикально на продукт сверху. Конфигурация, при которой оптическая камера расположена по вертикали выше конвейера так, что с ее помощью обеспечен вид на продукт сверху, является особенно преимущественной. Разумеется, расположение ниже конвейера также является возможным.
Предпочтительный вариант устройства отличается тем, что с конвейером связаны по меньшей мере две оптические камеры, в которых предусмотрены разные процессы построения изображений. Особенно преимущественный аспект этого варианта выполнения заключается в том, что, для получения полного изображения (фотоснимка) продукта для регистрации изображения, например внешнего контура (в качестве характерных данных продуктов), может использоваться, например, простая оптическая камера, например камера с изображением в градациях серого, а для получения информации о нежелательных участках (в качестве характерных данных продуктов), таких как пятна крови, прожилки жира и т.п., также может использоваться специальная камера, например многоспектральная камера.
Преимущественно по меньшей мере одна оптическая камера является, соответственно, многоспектральной или гиперспектральной камерой. При использовании такой камеры в дополнение к характерным данным, обнаруживаемым рентгеновским блоком, может быть получена информация о дополнительных нежелательных участках, которые рентгеновский блок, в частности, может обнаруживать только неудовлетворительно или вообще не обнаруживать, для оптимизации качества получаемых характерных данных.
Соответственно, по меньшей мере одна оптическая камера предпочтительно выполнена в виде камеры с изображением в градациях серого, и/или RGB-камеры (камеры с цветовой моделью RGB - «красный, зеленый, синий»), и/или инфракрасной камеры, и/или ультрафиолетовой камеры. Этот предпочтительный вариант выполнения существенно улучшает полосу пропускания для получаемых характерных данных продуктов и упрощает возможное сопоставление с оптическими изображениями от оптических камер, расположенных в нижних по потоку станциях.
Конвейер предпочтительно представляет собой приводимую во вращение рентгеновскую конвейерную ленту, изготовленную из пластмассы и малотекстурированную на транспортирующей поверхности, и содержит подающую ленту в качестве верхней ветви и возвратную ленту в качестве нижней ветви. Продукты опираются на транспортирующую поверхность. С одной стороны, эта транспортирующая поверхность является настолько гладкой, т.е. выполненной, в частности, без зазоров, отверстий и т.п., что рентгеновские изображения могут быть получены без какого-либо препятствия. С другой стороны, транспортирующая поверхность имеет небольшую шероховатость в миллиметровом диапазоне для предотвращения скольжения/смещения продуктов на конвейере. Соответственно, транспортирующая поверхность выполнена малотекстурированной. Как указано выше, в плоскости транспортирования конвейер имеет транспортирующую поверхность без зазоров. Это означает, что продукты на транспортирующей поверхности поддерживаются по всей поверхности в любой момент времени и во всех местоположениях. Другими словами, конвейер с транспортирующей поверхностью подающей ветви образует непрерывную опорную поверхность для продуктов. В результате может быть обеспечено оптимизированное рентгеновское изображение.
Предпочтительный вариант отличается тем, что конвейер присоединен к блоку управления, спроектированному и выполненному с возможностью приема и анализа данных о перемещении указанного конвейера. Присоединение конвейера к блоку управления упрощает соотнесение с отдельными продуктами. Другими словами, заявленное решение обеспечивает возможность улучшенного и более точного соотнесения характерных данных, полученных рентгеновским блоком и каждой оптической камерой, с продуктом. Поскольку рентгеновская камера и оптическая камера расположены над одним и тем же конвейером и, соответственно, находятся очень близко друг к другу, визуальные данные, то есть наборы данных, могут быть наложены друг на друга без какого-либо сопоставления, непосредственно на основании временной разницы, которая зависит от скорости конвейера.
В предпочтительном варианте выполнения рентгеновский источник расположен над подающей лентой, а рентгеновская камера расположена между подающей лентой и возвратной лентой. Это дает возможность получения особенно четкого и значимого рентгеновского изображения, что улучшает идентификацию или получение характерных данных продуктов, например, об ориентации и местоположении костей, костных участков и т.п. внутри продукта.
Особенно предпочтительный вариант данного изобретения отличается тем, что рентгеновский блок и каждая оптическая камера, а также конвейер присоединены к блоку управления для приема и анализа наборов данных, при этом блок управления снабжен по меньшей мере одним процессором, выполненным с возможностью внедрения/введения по меньшей мере частей характерных данных продуктов, полученных рентгеновским блоком, в оптическое изображение от оптической камеры, относящееся к тому же продукту, для создания оптического передаточного изображения, образующего третий набор данных. Изображения или визуальные данные, созданные рентгеновским блоком и каждой оптической камерой, поступают в блок управления в виде наборов данных и подвергаются анализу. Особенно предпочтительно первый набор данных (полученный рентгеновским блоком) внедряется/вводится во второй набор данных (полученный оптической камерой) так, что образуется третий набор данных. Этот третий набор данных является оптическим передаточным изображением. Особенно предпочтительно информация об ориентации/местоположении/прохождении костей, костных участков и других участков твердой ткани (в виде характерных данных продуктов, полученных рентгеновским блоком, то есть первого набора данных) накладывается на оптическое изображение (то есть второй набор данных), которое, например, отображает продукт в целом или его внешний контур, так что в результате создается оптическое изображение (то есть третий набор данных), а именно передаточное изображение. Это оптическое изображение в виде третьего набора данных соответственно предоставляет данные о форме/виде продукта, например о внешнем контуре и о дефектах, например костных участках и т.д., подлежащих удалению. Данный вариант выполнения обеспечивает облегчение и упрощение возможной дополнительной обработки характерных данных продуктов. Вследствие того, что рентгеновский блок и/или каждая оптическая камера устройства связаны с одним конвейером, можно обойтись без сопоставления изображений, а именно рентгеновских изображений и изображений от оптических камер. Другими словами, соотнесение характерных данных с продуктом обеспечивается простым и точным образом, в частности, если местоположение отдельных продуктов может быть определено на основании данных о перемещении конвейера. Дополнительная оптическая камера, как вариант, также может предоставлять данные о дефектах, которые могут быть получены и проанализированы с помощью блока управления.
Особенно предпочтительно указанный вариант отличается тем, что блок управления с процессором выполнен с возможностью определения траекторий резания исходя из характерных данных, полученных оптической камерой, и характерных данных, полученных рентгеновским блоком, при этом указанные траектории резания определяются исходя из характерных данных продуктов, полученных рентгеновским блоком, непосредственно с помощью оптического изображения от оптической камеры, относящегося к тому же продукту, таким образом, что блок управления обеспечивает оптическое изображение от оптической камеры, а именно передаточное изображение, для дополнительной обработки. В случае, когда в дополнение к рентгеновскому блоку выполнена только одна оптическая камера, указанный рентгеновский блок при помощи блока управления может обеспечить, например, информацию только о траекториях резания, тогда как оптическая камера при помощи блока управления может обеспечить информацию о продукте в целом или его внешнем контуре и, при необходимости, о дополнительных траекториях резания, которые повышают качество траекторий резания, полученных из рентгеновского изображения. Эти данные (траектории резания и фотоснимки продуктов и/или внешний контур) затем могут быть объединены друг с другом для создания общего третьего набора данных, а именно основанного на оптическом изображении. В случае, когда в дополнение к рентгеновскому блоку выполнены две оптические камеры, указанный рентгеновский блок при помощи блока управления может обеспечить, например, информацию только о траекториях резания, тогда как вторая оптическая камера при помощи блока управления обеспечивает фотоснимок продукта в целом и/или информацию о внешнем контуре, при этом вторая оптическая камера при помощи блока управления обеспечивает информацию о траекториях резания.
Устройство согласно изобретению может использоваться автономным образом. Однако предпочтительно устройство присоединено к нижней по потоку обрабатывающей станции. Это означает, что сведения, данные, информация и т.д., полученные от вышеописанного устройства, могут быть использованы для дополнительной обработки в обрабатывающей станции.
Эта дополнительная обработка может включать сортировку, упаковку и, в частности, резание для удаления нежелательных участков и/или разделения на порции.
Соответственно, указанная цель также достигается с помощью установки, которая имеет вышеописанные особенности и в которой указанное устройство, спроектированное и выполненное с возможностью приема и анализа характерных данных продуктов, выполнено в соответствии с одним из пунктов формулы изобретения, приведенной в данном документе. Возникающие при этом преимущества описаны выше в отношении устройства, поэтому для исключения повторений сделана ссылка на соответствующие разделы. Тот факт, что оптические изображения от оптических камер могут быть наложены одно на другое для идентификации продуктов, является особенно преимущественным. Другими словами, сопоставление оптических изображений выполняется с использованием одного и того же процесса построения изображений или по меньшей мере аналогичных процессов построения изображений, так что процесс сопоставления упрощается и улучшается с точки зрения качества.
Особенно предпочтительный вариант, соответственно, отличается тем, что все блоки управления указанной установки функционально соединены друг с другом, при этом по меньшей мере один блок управления содержит процессор, выполненный с возможностью наложения оптических изображений от оптических камер устройства, с одной стороны, и обрабатывающей станции, с другой стороны, друг на друга таким образом, что идентификация продуктов и сопоставление относительных местоположений каждого продукта на двух конвейерах устройства, с одной стороны, и обрабатывающей станции, с другой стороны, происходит на основании только оптических изображений от оптических камер.
В особенно преимущественном варианте устройство и обрабатывающая станция присоединены к блоку управления, который содержит процессор, выполненный с возможностью наложения оптического передаточного изображения, образованного из оптического изображения от оптической камеры устройства и дополненного характерными данными, полученными рентгеновским блоком указанного устройства, и оптического изображения от оптической камеры обрабатывающей станции друг на друга таким образом, что возможно управление режущим блоком при помощи блока управления для каждого продукта на основании определенных по отдельности траекторий резания. Другими словами, для сопоставления используется третий набор данных и четвертый набор данных.
Режущий блок предпочтительно содержит водоструйный блок, содержащий по меньшей мере одно сопло. Этот вариант выполнения может использоваться для выполнения особенно быстрых и точных отделяющих или отсекающих разрезов для удаления нежелательных участков и/или для разделения на порции.
Особенно предпочтительно по меньшей мере одна оптическая камера как в устройстве, с одной стороны, так и в обрабатывающей станции, с другой стороны, предусматривает один и тот же процесс построения изображений, что дополнительно упрощает сопоставление.
Предпочтительно по меньшей мере один блок управления содержит по меньшей мере одно запоминающее средство, по меньшей мере одно средство ввода и по меньшей мере одно средство вывода.
Указанная цель также достигается с помощью способа, который включает вышеописанные этапы технологического процесса и в котором на первом конвейере в дополнение к характерным данным продуктов, полученным с помощью рентгеновского блока, получают характерные данные, относящиеся к каждому продукту, с помощью оптической камеры, причем данные, полученные оптической камерой, связанной с первым конвейером, и образующие второй набор данных, принимают и анализируют с помощью блока управления, при этом идентификацию продуктов, а также сопоставление и анализ наборов данных осуществляют на основании двух наборов данных, созданных оптическими камерами, а именно второго набора данных и четвертого набора данных. Возникающие при этом преимущества описаны выше в отношении установки, поэтому для исключения повторений сделана ссылка на соответствующие разделы.
Указанный способ дополнительно отличается тем, что первый набор данных, содержащий информацию о траекториях резания, созданную рентгеновским блоком, внедряют/вводят во второй набор данных, а именно в оптическое изображение, созданное оптической камерой, связанной с первым конвейером, так, что в блок управления направляют оптическое передаточное изображение в виде третьего набора данных для сопоставления и анализа, при этом идентификацию продуктов, а также сопоставление и анализ наборов данных осуществляют на основании третьего и четвертого наборов данных.
Предпочтительно в оптическое изображение от оптической камеры, связанной с первым конвейером, внедряют/вводят информацию о местоположениях нежелательных участков, созданную рентгеновским блоком, в виде векторных данных, растровых данных и т.п. и выполняют сопоставление и анализ на основании оптического изображения от оптической камеры, связанной с первым конвейером, и оптического изображения от оптической камеры, связанной со вторым конвейером. Как вариант, в оптическое изображение, используемое для сопоставления, также может быть внедрена/введена информация о нежелательных участках, созданная дополнительной оптической камерой устройства, в виде векторных данных, растровых данных и т.п..
Преимущественно для идентификации продуктов каждое оптическое изображение, полученное с помощью оптической камеры, связанной с нижним по потоку конвейером, сравнивают с оптическими изображениями от оптической камеры, связанной с первым конвейером, которые хранят в запоминающем средстве блока управления, и выбирают изображение с наибольшими совпадениями.
Особенно предпочтительно способ выполняют с использованием установки в соответствии с одним из пунктов формулы изобретения, приведенной в данном документе.
Дополнительные предпочтительные и/или преимущественные особенности и усовершенствования, а также предпочтительные этапы технологического процесса следуют из зависимых пунктов формулы изобретения и подробного описания. Особенно предпочтительные варианты выполнения устройства и установки в дополнение к способу более подробно объяснены со ссылкой на прилагаемые чертежи. На чертежах:
фиг. 1 изображает схематический вид первого варианта выполнения устройства согласно изобретению с рентгеновским блоком и оптической камерой,
фиг. 2 изображает схематический вид другого варианта выполнения устройства согласно изобретению с рентгеновским блоком и двумя оптическими камерами,
фиг. 3 изображает схематический вид первого варианта выполнения установки согласно изобретению,
фиг. 4 изображает схематический вид другого варианта выполнения установки согласно изобретению, и
фиг. 5 изображает схематический вид еще одного варианта выполнения установки согласно изобретению.
Устройство, изображенное на чертеже, выполнено с возможностью получения и анализа характерных данных для филе рыбы. Соответственно, изображенная установка выполнена с возможностью обработки, а именно разрезания филе рыбы. Однако аналогичным образом устройство и установка выполнены с возможностью получения и анализа характерных данных и обработки других продуктов пищевой промышленности, таких как мясо, домашняя птица.
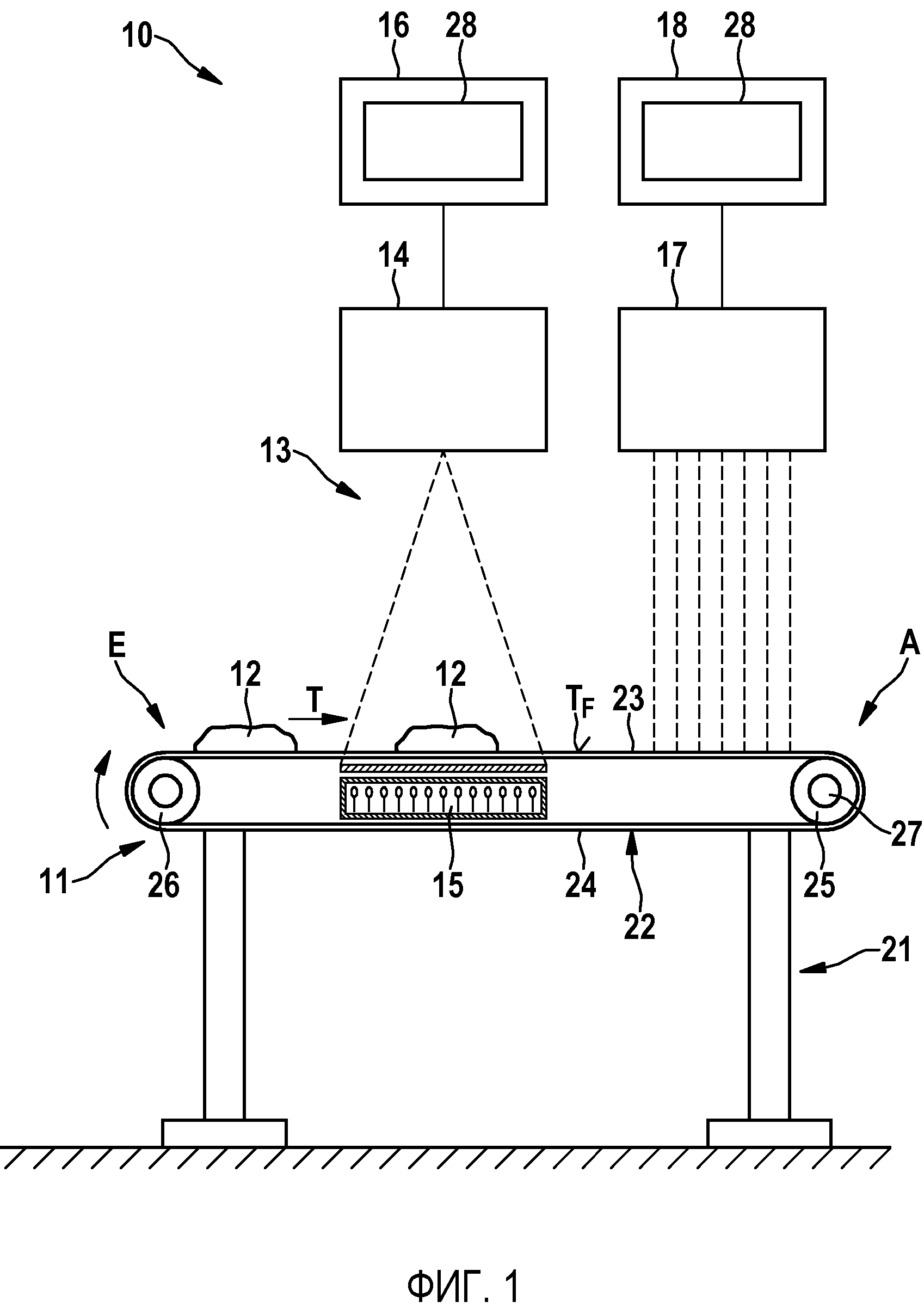
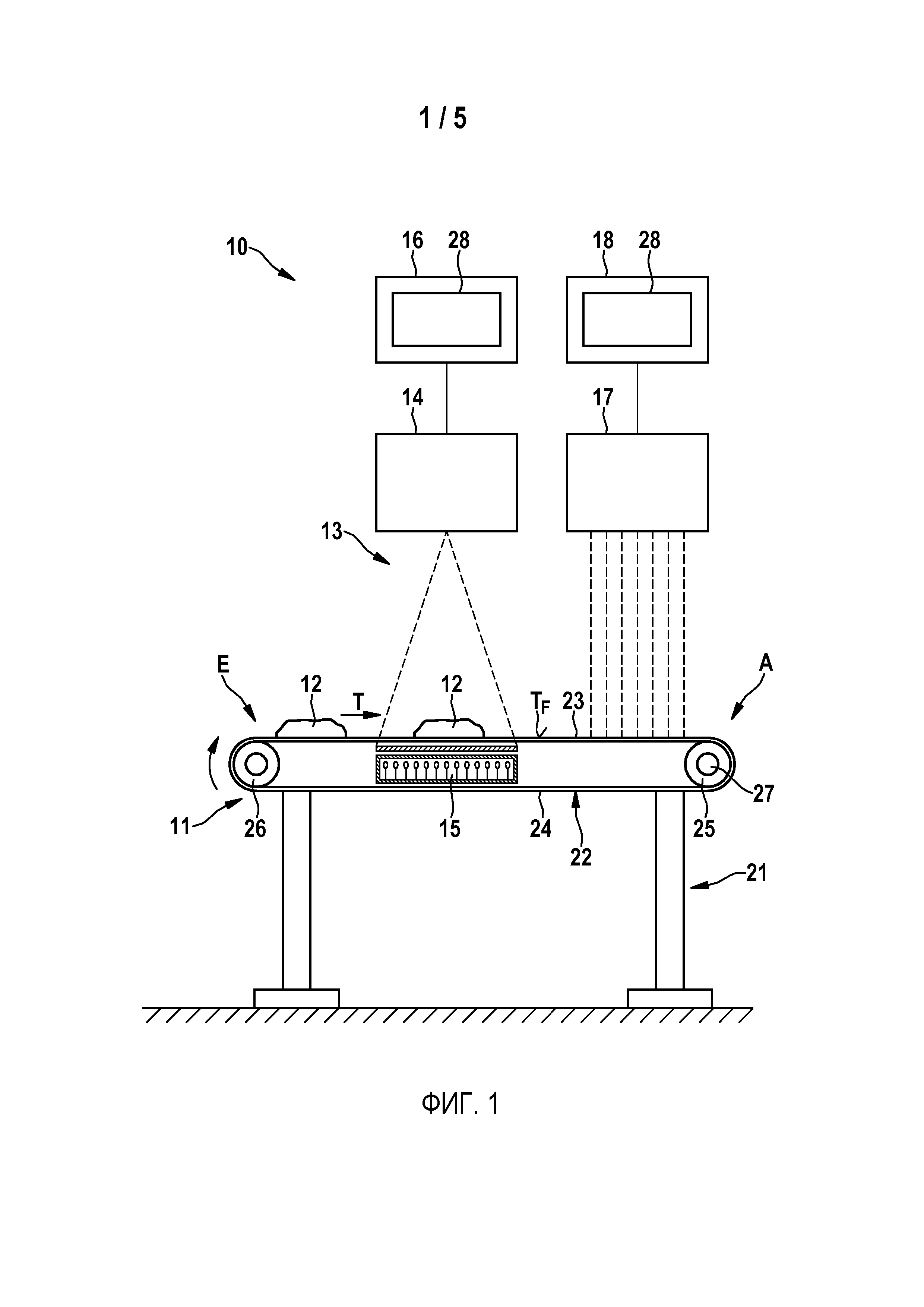
На фиг. 1 изображено устройство 10, спроектированное и выполненное с возможностью получения и анализа характерных данных продуктов и содержащее конвейер 11, не имеющий зазоров в плоскости транспортирования и предназначенный для транспортирования разрозненных продуктов 12 в направлении Т транспортирования от загрузочного конца Е к разгрузочному концу А, рентгеновский блок 13, содержащий по меньшей мере один рентгеновский источник 14 и по меньшей мере одну рентгеновскую камеру 15 или по меньшей мере один детектор рентгеновского излучения для получения характерных данных продуктов, причем рентгеновский источник 14 и рентгеновская камера 15 связаны с конвейером 11 таким образом, что продукты 12 могут быть направлены между источником 14 и камерой 15. Устройство 10 также содержит блок 16 управления, который присоединен к блоку 13 и спроектирован и выполнен с возможностью приема и анализа характерных данных продуктов, образующих первый набор данных и полученных рентгеновским блоком 13.
Таким образом, блок 13 передает информацию/данные в блок 16 управления.
С помощью блока 16 управления характерные данные или их части, такие как информация об ориентации/местоположении костей, костных участков, получаемые рентгеновским блоком 13, анализируются и представляются в виде набора данных. Соединение между рентгеновским блоком 13 и блоком 16 управления может быть выполнено различными способами, а именно, например, с использованием проводов/кабелей или беспроводной связи, например, с помощью интерфейсов радиосвязи или беспроводной связи Bluetooth и т.п.
Согласно изобретению устройство 10 отличается тем, что с одним и тем же конвейером 11 между его загрузочным концом Е и разгрузочным концом А связана по меньшей мере одна оптическая камера 17, с помощью которой, в дополнение к рентгеновскому блоку 13, могут быть получены характерные данные продуктов 12, транспортируемых на конвейере 11, при этом камера 17 присоединена к блоку 18 управления, спроектированному и выполненному с возможностью приема и анализа характерных данных, образующих второй набор данных и полученных камерой 17.
С помощью блока 18 управления характерные данные, полученные оптической камерой 17, например, среди прочего, о размере и форме продукта, его внешнем контуре, длине, ширине, толщине, профиле, весе, объеме, а также о дефектах, например, среди прочего, пятнах крови, прожилках жира, или их части анализируются и представляются в виде второго набора данных. Соединение между камерой 17 и блоком 18 может быть выполнено различными способами, а именно, например, с использованием проводов/кабелей или беспроводной связи, например, с помощью интерфейсов радиосвязи или беспроводной связи Bluetooth и т.п.
Взятые по отдельности или в комбинации друг с другом, особенности и усовершенствования, а также этапы технологического процесса, описанные ниже, иллюстрируют предпочтительные варианты выполнения. Следует специально отметить, что особенности и этапы технологического процесса, кратко изложенные в формуле изобретения, и/или в описании, и/или на чертежах, или описанные для обычного варианта выполнения, могут обеспечить дополнительное усовершенствование вышеописанного устройства, а также нижеописанных установки и способа функционально независимым образом.
Оптическая камера 17 может быть расположена в направлении Т транспортирования продуктов 12 выше по потоку от рентгеновского блока 13, или, как показано на фиг. 1, ниже по потоку от рентгеновского блока 13. Как блок 13, так и камера 17 могут быть присоединены к отдельному блоку 16, 18 управления. В других вариантах выполнения, например, в соответствии с фиг. 2, рентгеновский блок 13 и оптическая камера 17 также могут быть присоединены к общему блоку 19 управления.
Местоположение блока 13 и/или камеры 17 может изменяться относительно конвейера 11. В дополнение к расположению блока 13 и/или камеры 17 ниже конвейера 11, предпочтительным является расположение над конвейером 11. На фиг. 1 в качестве примера изображен такой вариант выполнения, в котором над конвейером 11 расположен не только рентгеновский блок 13, но и оптическая камера 17. В данном контексте термин «над» означает, что излучение рентгеновского источника 14 и свет от источника оптической камеры 17 падают на продукт 12 сверху. Это может происходить под непрямым углом, но предпочтительно вертикально сверху для получения вида на продукт 12 сверху.
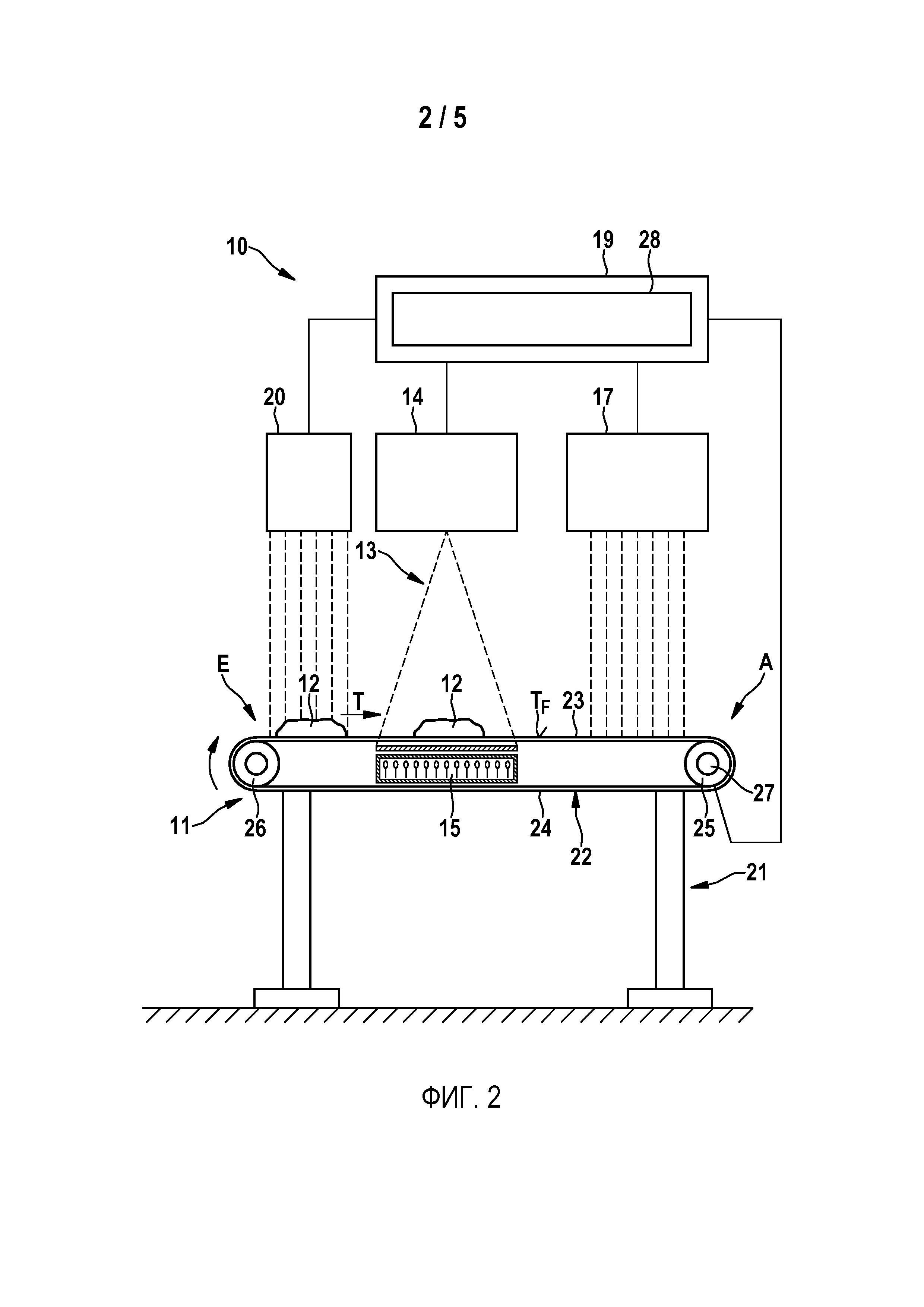
В предпочтительном варианте выполнения, как показано на фиг. 2, с конвейером 11 связаны по меньшей мере две оптические камеры 17, 20. В указанных двух камерах 17, 20 может быть предусмотрен один и тот же процесс построения изображений. Однако предпочтительно в двух камерах 17, 20 предусмотрены различные процессы построения изображений. Оптические камеры в контексте изобретения могут представлять собой камеры/датчики с изображением в градациях серого, RGB-камеры/датчики и инфракрасные или ультрафиолетовые камеры/датчики. Например, каждая оптическая камера может быть выполнена в виде камеры со строчно-кадровой разверткой или камеры с однострочной разверткой. В случае камер или датчиков с изображением в градациях серого фотоактивные компоненты, например фотодиод, фототранзистор, преобразуют электромагнитные волны видимого диапазона в электрические сигналы в датчике. В случае RGB-камер или датчиков свет разделяется на красный/зеленый/синий канал в зависимости от местоположения путем предварительной фильтрации поступающих световых волн перед элементами растра. В инфракрасных или ультрафиолетовых камерах или датчиках, благодаря выбору фотоактивных элементов, чувствительность смещена в диапазон с большей длиной волн (ИК) или меньшей длиной волн (УФ) по сравнению с видимым излучением.
По меньшей мере одна из оптических камер 17, 20 является многоспектральной или гиперспектральной камерой. По меньшей мере одна из камер 17, 20 выполнена в виде камеры с изображением в градациях серого, и/или RGB-камеры, и/или инфракрасной камеры, и/или ультрафиолетовой камеры. В варианте выполнения, изображенном на фиг. 2, одна из оптических камер, например камера 17, является простой камерой, а именно камерой с изображением в градациях серого. С помощью этой камеры 17 в качестве характерных данных продуктов может быть получена и направлена в блок 19 управления, например, информация о внешнем контуре. Другая оптическая камера 20 может представлять собой сложную камеру, а именно гиперспектральную камеру. С помощью камеры 20 может быть получена и направлена в блок 19 в качестве характерных данных продуктов информация о нежелательных участках, например дефектах в виде пятен крови, кости (костных остатков), хряща, жира, а также об инородных частицах, например стекле, пластмассе и т.д. Количество камер/датчиков и их местоположение вдоль конвейера 11 могут изменяться.
Конвейер 11 устройства 10 содержит раму 21 для поддержания подающей ленты. Подающая лента предпочтительно представляет собой приводимую во вращение рентгеновскую конвейерную ленту 22, изготовленную из пластмассы и малотекстурированную на транспортирующей поверхности TF, и содержит подающую ленту 23 в качестве верхней ветви и возвратную ленту 24 в качестве нижней ветви. Конвейерная лента 22 с направленной вверх транспортирующей поверхностью TF не имеет отверстий, проемов, зазоров и т.п. Другими словами, поверхность TF выполнена закрытой по всей длине и ширине. Рентгеновская конвейерная лента 22, предпочтительно выполненная бесконечной, состоящая из резины, пластмассы или другого синтетического материала и прозрачная для рентгеновского излучения, направляется вокруг по меньшей мере двух отклоняющих элементов 25, 26, один из которых, элемент 25 или 26, выполнен в виде приводного ролика, а другой элемент, 26 или 25, выполнен в виде отклоняющего ролика. В частности, в области приводного ролика, который может быть приведен в действие приводным средством, как вариант, может быть расположен кодовый датчик 27, с помощью которого может быть определено или проконтролировано местоположение ленты 22 вдоль длины конвейера 11 и, соответственно, может быть определено или проконтролировано местоположение продукта 12 на конвейере 11. Транспортирующая поверхность TF ленты 22, направленная к продуктам 12, выполнена малотекстурированной. Это означает, что закрытая поверхность TF имеет небольшую шероховатость. Однако также возможно использование совершенно гладких транспортирующих поверхностей.
В вариантах выполнения, изображенных на чертежах, рентгеновский источник 14 расположен над конвейером 11 и над подающей лентой 23. Рентгеновская камера 15 расположена между подающей лентой 23 и возвратной лентой 24. Как вариант, камера 15 также может быть расположена под возвратной лентой 24. Также возможны конфигурации с другим расположением источника 14 и камеры 15 относительно подающей ленты 23 или возвратной ленты 24.
Как вариант, конвейер 11 присоединен к блоку 19 управления, спроектированному и выполненному с возможностью приема и анализа данных о перемещении конвейера 11. В варианте выполнения, изображенном на фиг. 2, конвейер 11 или кодовый датчик 27 присоединен к общему блоку 19 управления, к которому также присоединены рентгеновский блок 13 и оптические камеры 17, 20. Однако также возможно присоединение к отдельному блоку управления, который функционально соединен с другими блоками 16, 18 управления.
Один или каждый блок 16, 18, 19 управления содержит по меньшей мере один процессор (центральный процессор, ЦП) 28. Предпочтительно рентгеновский блок 13 и каждая камера 17, 20, а также конвейер 11 присоединены к общему или главному блоку 19 управления для приема и анализа набора данных, при этом блок 19 снабжен по меньшей мере одним процессором (ЦП) 28, который выполнен с возможностью внедрения/введения по меньшей мере частей характерных данных, полученных блоком 13, в оптическое изображение от камеры 17, 20, относящееся к одному и тому же продукту, для создания оптического передаточного изображения, образующего третий набор данных. Этот предпочтительный вариант выполнения изображен на фиг. 2. В других вариантах выполнения к общему блоку 19 управления могут быть присоединены только рентгеновский блок 13, и/или отдельные оптические камеры 17, 20, и/или конвейер 11. Блок 19 управления и при необходимости также каждый другой блок 16, 18 управления, как вариант, в дополнение к указанному по меньшей мере одному процессору 28 содержит запоминающее средство, средство ввода, средство вывода и интерфейс. Кроме того, имеется возможность присоединения устройства 10 с помощью блока 19 к сети, которая может быть внутренней сетевой структурой (интрасетью) или внешней сетевой структурой (Интернет). Рентгеновский блок 13, оптические камеры 17, 20 и конвейер 11 также могут быть присоединены к отдельным блокам 16, 18 управления, которые, в свою очередь, взаимодействуют с главным блоком управления.
Все блоки 16, 18, 19 управления и, в частности, блок 19 управления, то есть промышленный контроллер, компьютер и т.п., содержат, как указано выше, один процессор 28 (ЦП), спроектированный и выполненный с возможностью получения наборов данных от рентгеновского блока 13 и каждой камеры 17, 20. Выбранные характерные данные продуктов, полученные с помощью блока 13, например информацию об ориентации ряда межмышечных костей в филе рыбы (например первый набор данных), предпочтительно вводят/внедряют с помощью процессора 28 в оптическое изображение от камеры 17, 20, которая отображает внешний контур продукта 12 (например второй набор данных). Другими словами, используемые характерные данные продуктов, полученные от блока 13, накладывают на оптическое изображение от камеры 17, 20. Полученное передаточное изображение (например третий набор данных) является, в конечном счете, пакетом данных со всеми данными, необходимыми для последующей обработки и полученными от блока 13 и каждой камеры 17, 20, при этом передаточное изображение является оптическим изображением.
Особенно предпочтительно блок 19 с процессором 28 выполнен с возможностью определения траекторий резания исходя из характерных данных, полученных камерой 17, 20, и характерных данных, полученных рентгеновским блоком 13, при этом траектории резания определяются исходя из характерных данных продукта 12, полученных блоком 13 непосредственно с помощью оптического изображения от камеры 17, 20, относящегося к тому же продукту 12, таким образом, что блок 19 управления обеспечивает оптическое изображение от камеры 17, 20, а именно передаточное изображение, для дополнительной обработки. Также могут быть предусмотрены отдельные наборы данных для дополнительной обработки, причем указанные наборы данных могут обрабатываться блоком управления нижней по потоку обрабатывающей станции.
Два возможных варианта выполнения, основанные на фиг. 1 и 2, объяснены более подробно исключительно в качестве примера. В случае устройства 10 согласно фиг. 1, например, внешний контур продукта 12 может быть воссоздан или отображен с помощью оптической камеры 17 и присоединенного блока 18 управления (например второй набор данных), тогда как траектории резания для участков, подлежащих удалению из продукта 12, могут быть созданы с помощью рентгеновского блока 13 и присоединенного блока 16 управления (например первый набор данных). Путем наложения первого набора данных на второй набор данных, т.е. без какого-либо сопоставления, создается или отображается третий набор данных в виде оптического изображения. Наложение может происходить, например, на основании исключительно определенной временной разницы между созданием рентгеновского изображения и оптического изображения, т.е. в зависимости от скорости транспортирования конвейером 11.
В случае устройства 10 согласно фиг. 2, например, внешний контур продукта 12 может быть воссоздан или отображен с помощью оптической камеры 17, например камеры с изображением в градациях серого, и присоединенного блока 19 управления. При помощи оптической камеры 20, например камеры с изображением в градациях серого, и присоединенного блока 19 управления могут быть созданы или отображены траектории резания для дефектов, которые не были надежно и точно идентифицированы ни простой оптической камерой 17, ни рентгеновским блоком 13, а именно пятна крови, изменения цвета, разрезы и т.п., и которые подлежат удалению из продукта 12. Из этих наборов данных блок 19 формирует передаточное изображение в виде третьего набора данных. Передаточное изображение может быть создано на основе оптического изображения от камеры с изображением в градациях серого и/или на основе оптического изображения от гиперспектральной камеры, которая в дополнение к траекториям резания также может, среди прочего, воссоздавать или отображать внешний контур продукта 12. Передаточное изображение, как вариант, дополненное набором данных, предоставленным рентгеновским блоком, затем может использоваться для возможного сопоставления с оптическими изображениями нижних по потоку оптических камер. Однако набор данных, обеспеченный рентгеновским блоком, также может быть представлен для дополнительной обработки отдельно и независимо от набора данных, обеспеченных указанной или каждой камерой.
Как указано выше, устройство 10 может использоваться в виде отдельного мобильного устройства для получения и анализа характерных данных продуктов. Однако предпочтительно устройство 10 является частью установки 29 для обработки продуктов 12 пищевой промышленности (см., в частности, фиг. 3). В частности, обработка продуктов 12 в дополнение к сортировке и упаковке также включает резание, причем резание включает удаление нежелательных участков продукта 12, с одной стороны, и/или разбивку/разделение продуктов 12 на порции, с другой стороны.
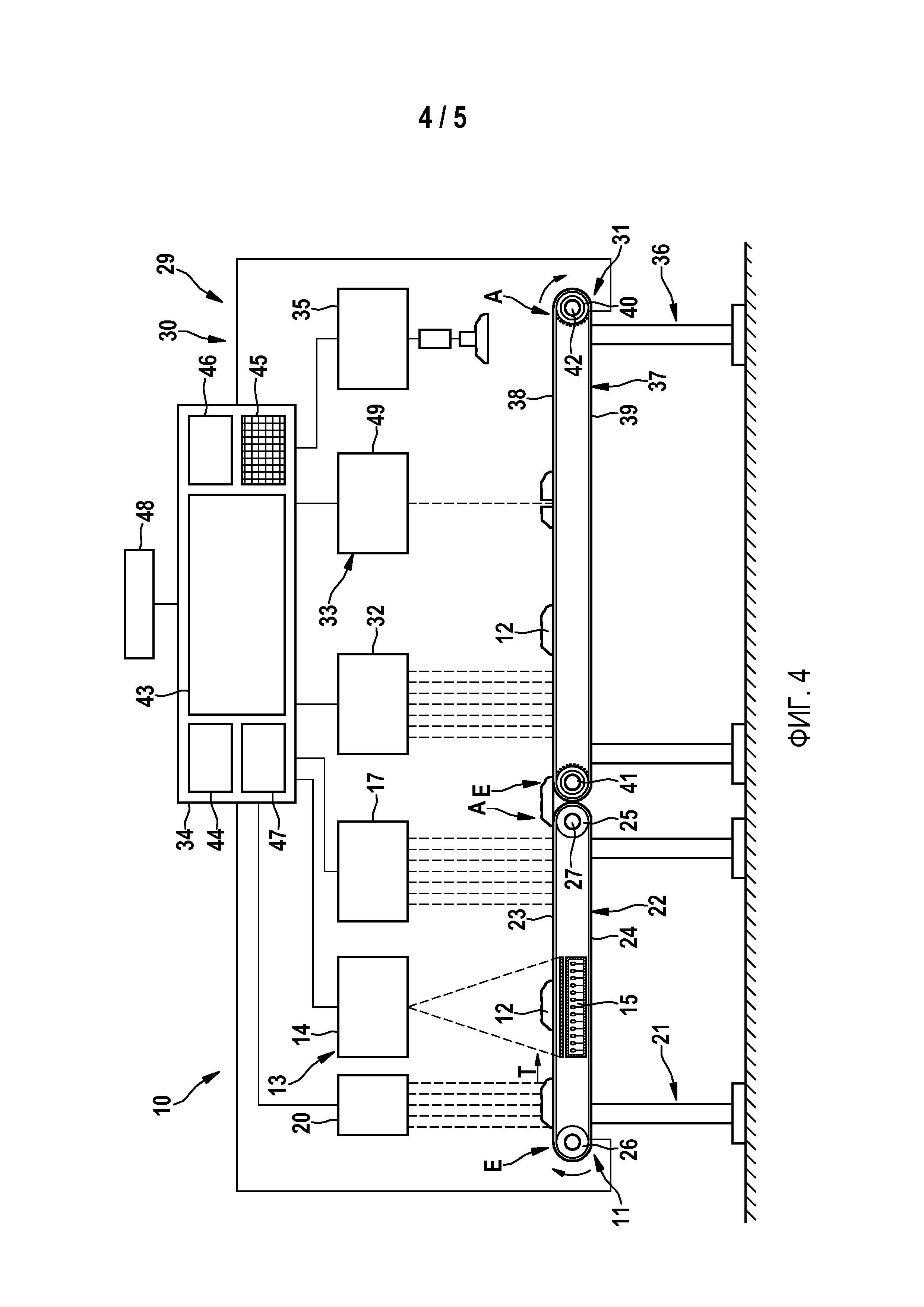
Установка 29 содержит устройство 10, спроектированное и выполненное с возможностью анализа характерных данных продуктов 12, а также обрабатывающую станцию 30, расположенную ниже по потоку от устройства 10 в направлении Т транспортирования продуктов 12 и содержащую конвейер 31 для транспортирования продуктов 12 в направлении Т от загрузочного конца Е к разгрузочному концу А, по меньшей мере одну оптическую камеру 32, с помощью которой могут быть получены характерные данные продуктов 12, транспортируемых на конвейере 31 обрабатывающей станции 30, а также режущий блок 33.
Оптическая камера 32 присоединена к блоку 34 управления, который спроектирован и выполнен с возможностью приема и анализа указанных характерных данных, полученных камерой 32. Режущий блок 33 спроектирован и выполнен с возможностью разрезания и удаления нежелательных участков продуктов 12 и/или разделения продуктов 12 на порции и присоединен к блоку 34 управления для управления блоком 33 на основании ранее полученных и проанализированных характерных данных продуктов.
Данная установка 29 согласно изобретению отличается тем, что устройство 10, спроектированное и выполненное с возможностью анализа характерных данных продуктов 12, или один из вариантов выполнения реализованы так, как описано выше.
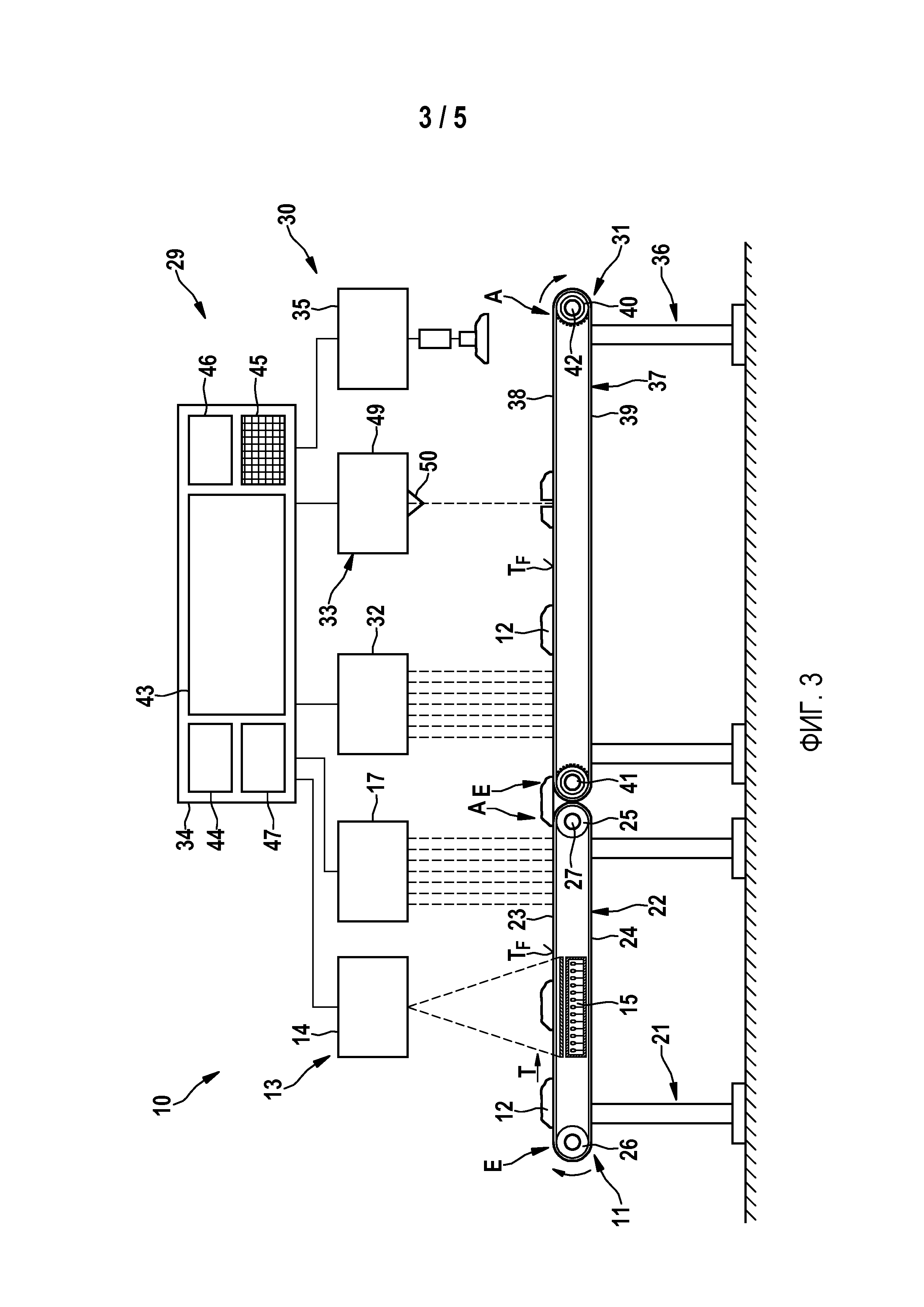
На фиг. 3 изображен первый вариант выполнения установки 29. В дополнение к конвейеру 11 устройство 10 содержит рентгеновский блок 13 и оптическую камеру 17. Блок 13 и камера 17 в данном варианте выполнения присоединены к блоку 34 управления. Как вариант, конвейер 11 также может быть присоединен к блоку 34 управления (см., например, фиг. 4). Все кабельные/сигнальные соединения в установке 29 могут быть реализованы различными способами, а именно, например, с использованием проводов/кабелей или беспроводной связи, например, с помощью интерфейсов радиосвязи или беспроводной связи Bluetooth и т.п. Обрабатывающая станция 30 в дополнение к конвейеру 31 содержит оптическую камеру 32 и режущий блок 33. Как вариант, станция 30 также содержит станцию 35 для удаления, предназначенную для удаления продуктов 12 или их частей с конвейера 31. Оптическая камера 32, режущий блок 33 и станция 35 в данном варианте выполнения присоединены к блоку 34 управления. Как вариант, конвейер 31 также может быть присоединен к блоку 34 управления (см., например, фиг. 4). Все компоненты также могут быть присоединены к отдельным блокам управления, которые функционально присоединены к главному блоку управления. Также имеется возможность связывания отдельных или всех компонентов устройства 10 с блоком управления, который, в свою очередь, функционально соединен с блоком управления обрабатывающей станции 30.
Конвейер 31 обрабатывающей станции 30 содержит раму 36 для поддержания подающей ленты. Подающая лента предпочтительно представляет собой приводимую во вращение рентгеновскую конвейерную ленту 37, имеющую открытую или сетчатую структуру. Лента 37 предпочтительно изготовлена из нержавеющей стали или другого прочного нержавеющего материала. Лента 37 содержит подающую секцию 38 в качестве верхней ветви и возвратную секцию 39 в качестве нижней ветви. Конвейерная лента 37 с направленной вверх транспортирующей поверхностью TF имеет отверстия, проемы и т.п.Другими словами, поверхность TF предпочтительно выполнена проницаемой, в частности, для воды по всей длине и ширине. Предпочтительно бесконечная конвейерная лента 37 направляется вокруг по меньшей мере двух отклоняющих элементов 40, 41, один из которых, элемент 40 или 41, выполнен в виде приводного ролика, а другой элемент, 41 или 40, выполнен в виде отклоняющего ролика. В частности, в области приводного ролика, который может быть приведен в действие приводным средством, как вариант, может быть расположен кодовый датчик 42, с помощью которого может быть определено или проконтролировано местоположение ленты 37 вдоль длины конвейера 31 и, соответственно, может быть определено или проконтролировано местоположение продукта 12 на конвейере 31.
Установка 29 согласно фиг. 4 сопоставима с установкой 29 согласно фиг. 3, поэтому для обозначения одинаковых компонентов используются одинаковые номера позиций. В дополнение к установке 29, показанной на фиг. 3, установка 29, показанная на фиг. 4, для устройства 10 содержит вторую оптическую камеру 20, которая также присоединена к блоку 34 управления. Кроме того, как указано выше, к блоку 34 управления присоединены конвейеры 11, 31.
Предпочтительно в одном или каждом варианте выполнения все блоки управления установки 29 функционально соединены друг с другом или образуют общий блок 34 управления. Этот блок 34 содержит по меньшей мере один процессор 43, выполненный с возможностью наложения оптических изображений от камер 17, 20, 32 устройства 10, с одной стороны, и обрабатывающей станции 30, с другой стороны, друг на друга таким образом, что идентификация продуктов 12 и сопоставление относительных местоположений каждого продукта 12 на двух конвейерах 11, 31 устройства 10, с одной стороны, и обрабатывающей станции 30, с другой стороны, происходит на основании только оптических изображений от камер 17, 20, 32. Как вариант, блок 34 управления в дополнение к указанному по меньшей мере одному процессору 43 содержит запоминающее средство 44, средство 45 ввода, средство 46 вывода и интерфейс 47. Кроме того, имеется возможность присоединения установки 29 с помощью блока 34 к сети 48, которая может быть внутренней сетевой структурой (интрасетью) или внешней сетевой структурой (Интернет). Таким образом, с помощью блока 34 управления и процессора 43 визуальные данные оптических изображений от устройства 10, с одной стороны, и обрабатывающей станции 30, с другой стороны, могут быть подвергнуты сравнению для идентификации и могут быть сопоставлены и проанализированы для определения относительных местоположений каждого продукта 12 на двух конвейерах 11, 31. С помощью блока 34 управления благодаря конфигурации процессора 43 также можно выполнять преобразования визуальных данных.
В предпочтительном варианте выполнения устройство 10 и обрабатывающая станция 30 присоединены к блоку 34 управления, который содержит процессор 43, выполненный с возможностью наложения оптического передаточного изображения, образованного из по меньшей мере одного оптического изображения от камеры 17 и/или 20 устройства 10 и дополненного характерными данными продуктов, полученными рентгеновским блоком 13 устройства 10, и оптического изображения от камеры 32 обрабатывающей станции 30 друг на друга таким образом, что возможно управление режущим блоком 33 при помощи блока 34 управления для каждого продукта 12 на основании определенных по отдельности траекторий резания.
В предпочтительном варианте выполнения режущий блок 33 содержит водоструйный блок 49 с по меньшей мере одним соплом 50. Указанное или каждое сопло 50, как вариант, является свободно управляемым в пространстве так, что оно может следовать по любым траекториям резания. Вместо водоструйного блока 49 также возможно управление другими режущими средствами, такими как отсекающие ножи, лезвия, ленточные ножи и т.п. Для этого режущий блок 33 может содержать один нож или несколько ножей.
Предпочтительно по меньшей мере одна оптическая камера 17, 20, 32 соответственно в устройстве 10, с одной стороны, и в обрабатывающей станции 30, с другой стороны, предусматривает один и тот же процесс построения изображений. Особенно предпочтительным является вариант выполнения, в котором устройство 10 содержит простую оптическую камеру 17, например камеру с изображением в градациях серого для регистрации внешнего контура, и сложную оптическую камеру 20, например гиперспектральную камеру для регистрации дефектов, а обрабатывающая станция 30 содержит простую оптическую камеру 32, например камеру с изображением в градациях серого. При этом соотнесение между двумя одинаковыми системами построения изображений может быть выполнено особенно простым образом (методом градаций серого). В этом случае оптическое изображение от камеры 17 устройства 10 образует основу для передаточного изображения (третий набор данных), в которую внедряют данные (траектории резания) рентгеновского блока 13 и второй оптической камеры 20 устройства 10. Сопоставление также может быть выполнено исключительно на основании, например, оптического изображения от камеры 17, тогда как наборы данных от рентгеновского блока 13 и другой камеры 20 накладывают непосредственно на оптическое изображение от камеры 32 обрабатывающей станции 30 для отображения траекторий резания.
В другом варианте выполнения, не показанном на чертежах, в зоне перехода от конвейера 11 устройства 10 к конвейеру 31 обрабатывающей станции 30 может быть расположена дополнительная оптическая камера. Указанная оптическая камера одновременно регистрирует данные с разгрузочного конца конвейера 11 устройства 10 и загрузочного конца конвейера 31 станции 30. Предпочтительно эта оптическая камера также присоединена к блоку 34 управления. При использовании такой оптической камеры можно обойтись без сопоставления двух видов визуальных данных (т.е. визуальных данных от камеры 32 станции 30 и от камеры 17 и/или 20 устройства 10) и рассчитать алгоритм преобразования путем наблюдения перемещения продукта во время передачи с одного конвейера 11 к нижнему по потоку конвейеру 31 при помощи указанной оптической камеры.
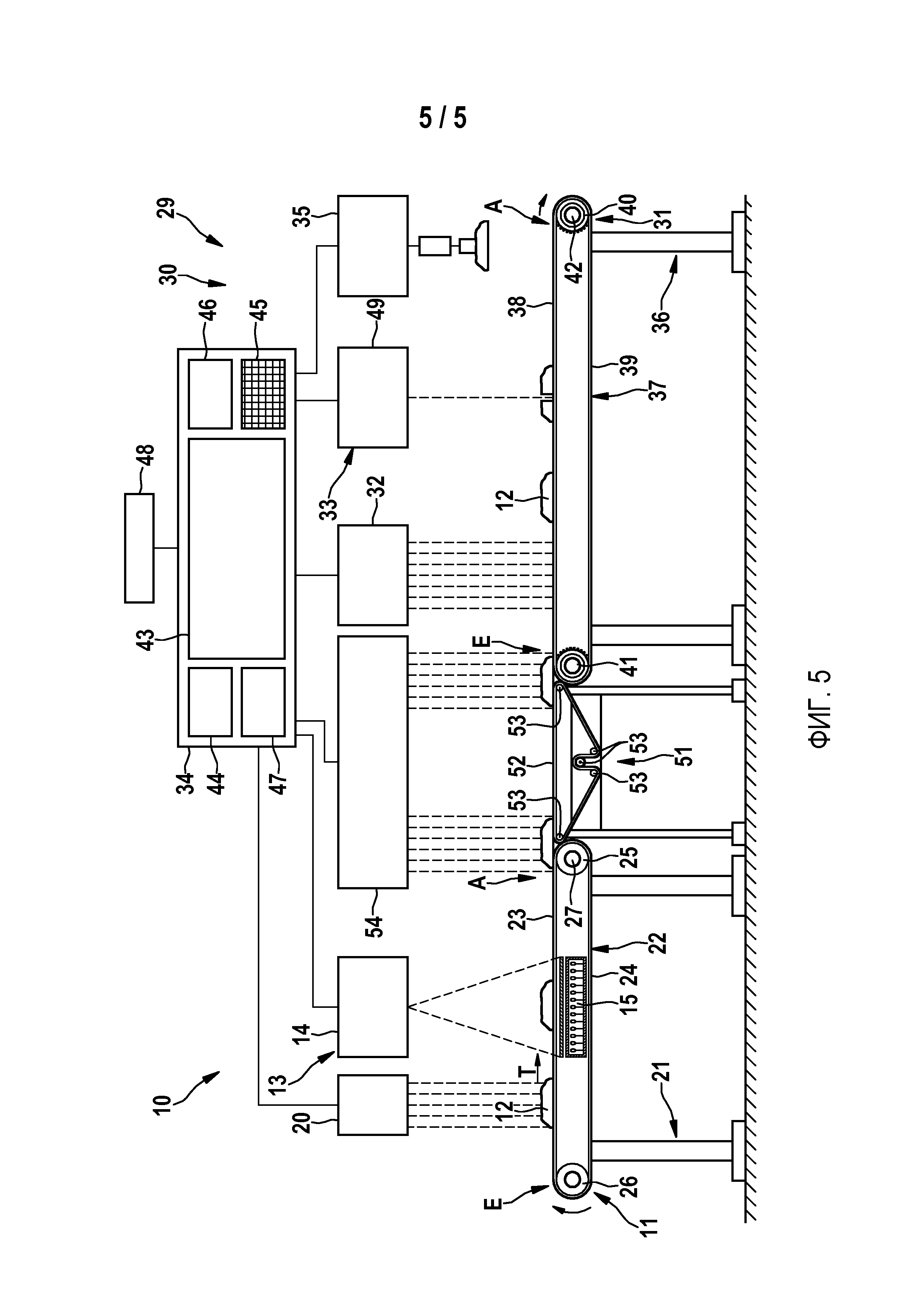
На фиг. 5 изображен еще один вариант выполнения установки 29, которая по существу аналогична с точки зрения конфигурации вариантам выполнения, показанным на фиг. 3 и 4. Однако установка 29 в варианте выполнения согласно фиг. 5 содержит промежуточный конвейер 51, расположенный между конвейером 11 устройства 10 и конвейером 31 обрабатывающей станции 30, для оптимизации передачи продуктов 12 от устройства 10 к станции 30. Промежуточный конвейер 51 содержит бесконечную конвейерную ленту 52, которая направляется вокруг более чем двух отклоняющих элементов 53. По меньшей мере один отклоняющий элемент 53 выполнен в виде приводного ролика, а другие отклоняющие элементы 53 используются для регулирования натяжения ленты 52. Отклоняющие элементы 53, расположенные у загрузочного конца Е и разгрузочного конца А промежуточного конвейера 51, представляют собой отклоняющие ролики, наружный диаметр которых значительно меньше по сравнению с наружными диаметрами отклоняющих элементов 25, 41 смежных конвейеров 11, 31. В результате зазор между конвейерной лентой 52 и подающей лентой 23, с одной стороны, и подающей лентой 38, с другой стороны, уменьшен так, что конвейер 11 устройства 10, промежуточный конвейер 51 и конвейер 31 обрабатывающей станции образуют почти непрерывную и не имеющую зазоров транспортирующую поверхность. Все конвейеры 11, 31 и промежуточный конвейер 51 предпочтительно приводятся в действие с одинаковой скоростью. Промежуточный конвейер 51, как вариант, также может компенсировать имеющееся различие по высоте между конвейером 11 устройства 10 и конвейером 31 станции 30.
Промежуточный конвейер 51 предпочтительно также присоединен к блоку 34 управления. В модификации этого варианта выполнения с промежуточным конвейером 51 может быть связана по меньшей мере одна оптическая камера 54. На фиг. 5 изображен вариант, в котором оптическая камера 54 регистрирует данные с обеих зон перехода: от конвейера 11 к промежуточному конвейеру 51 и от промежуточного конвейера 51 к конвейеру 31. Также возможны другие расположения и конфигурации оптических камер.
Разумеется, в дополнение к подробно рассмотренным оптическим камерам установки 29, служащим в качестве системы построения изображений, также могут использоваться трехкоординатные (3D) системы и другие системы построения изображений.
Ниже со ссылкой на чертеж приведено более подробное объяснение принципа предложенного способа. Указанный способ используется для обработки продуктов 12 пищевой промышленности и описан с точки зрения разрезания филе рыбы. Однако данный способ также может использоваться аналогичным образом для разрезания других продуктов 12, таких как куриное филе и т.п., а также для сортировки или упаковки в соответствии с характерными данными продуктов.
Продукты 12 сначала транспортируют с помощью первого конвейера 11 от загрузочного конца Е к разгрузочному концу А в направлении Т транспортирования. При помощи рентгеновского блока 13 получают характерные данные, в частности, о дефектах в виде костей, костных участков и другой твердой ткани, относящиеся к каждому продукту 12 на первом конвейере 11, при этом полученные данные, образующие первый набор данных, поступают в блок 34 управления, который анализирует их с обеспечением определения траекторий резания для вырезания нежелательных участков из продуктов 12, например из филе рыбы, и/или для разделения продуктов 12 на порции. Затем продукты 12 направляют от первого конвейера 11 к нижнему по потоку конвейеру 31, с помощью которого продукты 12 транспортируют в направлении Т от загрузочного конца к разгрузочному концу. Характерные данные продуктов получают на нижнем по потоку конвейере 31 с помощью оптической камеры 32, при этом полученные данные, в частности, о внешнем контуре, образующие четвертый набор данных, поступают в блок 34 управления, который анализирует их для обеспечения идентификации каждого продукта. Согласно изобретению на первом конвейере 11 в дополнение к характерным данным, полученным рентгеновским блоком 13, получают конкретные данные, относящиеся к каждому продукту 12, с помощью по меньшей мере одной оптической камеры 17 и/или 20, при этом данные, полученные камерой 17 и/или 20, связанной с первым конвейером 11, и образующие второй набор данных, поступают в блок 34 управления, который анализирует их. Кроме того, принятые наборы данных сопоставляют и анализируют с помощью блока 34 управления для вычисления относительных местоположений каждого продукта 12 на двух конвейерах 11, 31. Наконец, продукты 12 разрезают по предварительно определенным и присвоенным соответствующему продукту 12 траекториям резания с помощью режущего блока 33, который регулируется блоком 34 управления. Принятые наборы данных также используются для выполнения возможных преобразований, обусловленных смещениями, перемещениями, скручиванием и т.п.продуктов 12 во время передачи продуктов 12 от одного конвейера 11 к другому конвейеру 31.
Как указано выше, существует несколько вариантов для идентификации, а также сопоставления и анализа собранной информации. Идентификация продуктов и сопоставление могут происходить, например, исключительно на основании изображения от одной из оптических камер 17, 20 устройства 10 и на основании изображения от оптической камеры 32 обрабатывающей станции 30. Если продукт 12 идентифицирован и известна его ориентация/местоположение на втором конвейере 31, то при необходимости после преобразования траектории резания, созданные исходя из наборов данных от рентгеновского блока 13 и одной из камер 17, 20 устройства 10, могут быть внедрены/введены в изображение от оптической камеры 32 обрабатывающей станции 30. Перед проведением сравнения/сопоставления изображения от одной из камер 17, 20 устройства 10 с изображением от камеры 32 станции 30 траектории резания, созданные исходя из набора данных от блока 13 и одной из камер 17, 20 устройства 10, могут быть внедрены/введены в изображение от другой камеры 17, 20 устройства 10.
Идентификация продуктов 12, а также сопоставление и анализ наборов данных происходят на основании наборов данных, созданных оптическими камерами 17 и/или 20 и 32, а именно предпочтительно на основании второго набора данных и четвертого набора данных. Принятые наборы данных, соответственно, также используются для отображения участков, подлежащих удалению из продукта 12, и/или линий резания для разделения продуктов 12 на порции для соответствующего продукта 12, прошедшего идентификацию и лежащего на конвейере 31 обрабатывающей станции 30, для обеспечения управления режущим блоком 33.
Другими словами, в соответствии с изобретением оптическое изображение передают от устройства 10 к блоку 34 управления для выполнения сопоставления, и это оптическое изображение от устройства 10 сопоставляют с оптическим изображением от обрабатывающей станции 30. Это означает, что после обработки всех визуальных данных (рентгеновского изображения и оптического изображения), полученных от продуктов 12 на первом конвейере 11, указанные данные передают в блок 34 управления (ЦП) для прохождения процесса сопоставления. Эти визуальные данные, отдельные для каждого продукта 12, предпочтительно сохраняют в списке. После считывания данных с каждого продукта 12 на втором конвейере оптической камерой 32 оптическое изображение от камеры 32 сравнивают с визуальными данными из указанного списка. Из списка выбирают изображение или изображения, показывающие наибольшие совпадения. После успешного сопоставления оптического изображения от камеры 32 с изображением/визуальными данными из списка, это изображение/эти визуальные данные удаляют из списка. Другими словами, для идентификации продуктов 12 каждое оптическое изображение, полученное при помощи камеры 32, связанной с нижним по потоку конвейером 31, сравнивают с оптическими изображениями от камеры 17 и/или 20, связанной с первым конвейером 11, которые сохранены в запоминающем средстве 44 (также называемом списком) блока 34 управления, и выбирают изображение с наибольшими совпадениями. После успешной идентификации и, при необходимости, после проведения сопоставления и анализа соответствующее оптическое изображение удаляют из запоминающего средства.
Если в списке или, соответственно, в запоминающем средстве 44 отсутствует (соответствующее) изображение/(соответствующие) визуальные данные или если ни одно изображение/визуальные данные из запоминающего средства 44 не показывают надлежащего результата по совпадению, то продукт 12 может быть пропущен в процессе обработки и направлен, например, на обработку вручную. Если изображение/визуальные данные остаются в запоминающем средстве 44 дольше, чем это допустимо, то, как вариант, они могут быть удалены из указанного средства 44 автоматически.
Предпочтительно первый набор данных, содержащий информацию о траекториях резания, созданную рентгеновским блоком 13, внедряют/вводят во второй набор данных, а именно в оптическое изображение, созданное оптической камерой 17, 20, связанной с первым конвейером 11, так, что в блок 34 управления направляют оптическое передаточное изображение в виде третьего набора данных для сопоставления и анализа, при этом идентификация продуктов 12, а также сопоставление и анализ наборов данных происходит на основании третьего и четвертого наборов данных. Это означает, что визуальные данные от камеры 17 или 20 (вместе с данными, полученными от блока 13) передаются в блок 34 управления. Кроме того, блок 34 получает визуальные данные от оптической камеры 32 и обрабатывает все визуальные данные после присвоения их продукту 12 для управления режущим блоком 33. Как вариант, данные от блока 13, визуальные данные от камеры 17 или 20 и визуальные данные от камеры 32 могут быть переданы в блок 34 по отдельности. Затем данные от блока 13 могут быть наложены на визуальные данные от камеры 32 обрабатывающей станции 30. После этого может быть выполнено сравнение визуальные данных от камеры 17 или 20 устройства 10 с визуальными данными от камеры 32 обрабатывающей станции 30 для гарантии того, что продукт 12 является тем же самым продуктом. Затем при необходимости может иметь место преобразование данных рентгеновского блока 13 и/или оптической камеры 17, 20 устройства 10, например, путем поступательного перемещения по осям X-Y, поворота, сдвига по осям X-Y, смещения по осям X-Y и т.п., из оптического изображения от камеры 17 или 20 устройства 10 в оптическое изображение камеры 32 обрабатывающей станции 30. Последовательность данных этапов может изменяться.
Само сопоставление может быть выполнено, например, как изложено ниже. В оптических изображениях камеры 17 или 20 и 32 находят отличительные точки и на основании их относительной взаимной ориентации присваивают их с обеспечением наилучшего возможного отображения относительных ориентаций/ близостей. В этом случае определяют функцию преобразования, которая соотносит прямоугольную сетку поверх оптического изображения от камеры 17 или 20 устройства 10 со сплайн-сеткой поверх оптического изображения от камеры 32 обрабатывающей станции 30. С помощью функции преобразования каждой точке в системе координат оптического изображения от камеры 17 или 20 устройства 10 присваивают однозначную точку в системе координат оптического изображения от камеры 32 станции 30. Результат сопоставления определяют через подобие всех визуальных данных продукта 12 в визуальных данных от камер 17 или 20 и 32, при этом функцию преобразования используют для соотнесения точек друг с другом. Термин «подобие» в данном случае следует понимать в смысле наименьших возможных отклонений в отношении соответствующего процесса построения изображений.
Предпочтительно в оптическое изображение от камеры 17, 20, связанной с первым конвейером 11, внедряют/вводят информацию о местоположениях нежелательных участков, созданную рентгеновским блоком 13 и/или дополнительной оптической камерой 17, 20, в виде векторных данных, растровых данных и т.п., при этом сопоставление и анализ выполняют на основании оптического изображения от камеры 17, 20, связанной с первым конвейером 11, и оптического изображения от камеры 32, связанной со вторым конвейером 31. Таким образом, в дополнение к идентификации (например, по внешнему контуру продукта), оптическое изображение также может использоваться для создания траекторий резания.
Особенно предпочтительным является осуществление описанного способа с помощью установки 29, такой как описанная выше.
Устройство и способ обработки рыбы
Транспортировочная установка, способ транспортировки рыбы поперечно ее продольной протяженности в направлении транспортирования и рыбообрабатывающая машина, содержащая такую транспортировочную установку
Устройство для удаления межмышечных костей из рыбного филе
Устройство для срезания рыбного филе с боковых костей, филетировочная машина, содержащая такое устройство, и способ срезания рыбного филе с боковых костей

