Результат интеллектуальной деятельности: МОТОРНЫЙ ТРАНСПОРТНЫЙ СКУТЕР
Вид РИД
Изобретение
Перекрестная ссылка на родственные заявки
В рассматриваемой заявке испрашивается приоритет по и заявлены все преимущества предварительной заявки на патент США № 62/311,594, поданной 22 марта 2016 года, которая включена в данный документ в полном объеме посредством ссылки.
Уровень техники
Для городских условий характерны различные виды транспорта: общественный транспорт, в том числе метро и автобусы; такси, в том числе традиционные такси и транспорт с подсадкой пассажиров; программы общего пользования велосипедами; личные автомобили или другие транспортные средства и личные велосипеды. Все эти виды транспорта имеют некоторые недостатки или негативные стороны.
Автомобильные транспортные средства, такие как такси, личные автомобили и грузовые автомобили или фургоны, могут быть дорогими по сравнению с другими вариантами перевозок и способствовать образованию дорожных заторов. Такси как правило стоит значительно дороже других вариантов перевозки, а за стоянку личных автомобилей и грузовых транспортных средств в местах назначения необходимо платить. Такси и автомобили занимают значительное место на дорогах по сравнению, например, с пешеходами или велосипедами, и требуют места для парковки, когда не используются.
Общественный транспорт может уменьшить загрязнение окружающей среды и дорожные заторы по сравнению с автомобильным транспортом, но у общественного транспорта есть проблемы с перевозкой пассажиров, имеющих при себе груз или детей, и с зоной охвата. Пассажиры могут перевозить объемные или многочисленные предметы, создающие сложности с погрузкой и выгрузкой, а также с укладкой в переполненном автобусе или вагоне метро. Пассажиры также могут быть родителями или опекунами, перевозящими детей, которые могут создавать аналогичные проблемы. Зона охвата общественного транспорта как правило не распространяется на весь путь до места назначения пассажира, что приводит к тому, что называется проблемой последней мили. К тому же, в некоторых городах и в некоторых районах в пределах городов доступ к общественному транспорту ограничен.
Хотя велосипеды могут уменьшить расходы, загрязнение окружающей среды и дорожные заторы, велосипеды имеют ограниченную грузоподъемность, они способны перевозить лишь одного ездока и небольшие предметы, такие как портфель, одну или две хозяйственные сумки. Велосипеды не могут перевозить детей без специального оборудования, которое как правило не предусмотрено в программах общего пользования велосипедами. Программы общего пользования велосипедами могут иметь такую же проблему последней мили, как общественный транспорт.
Краткое описание графических материалов
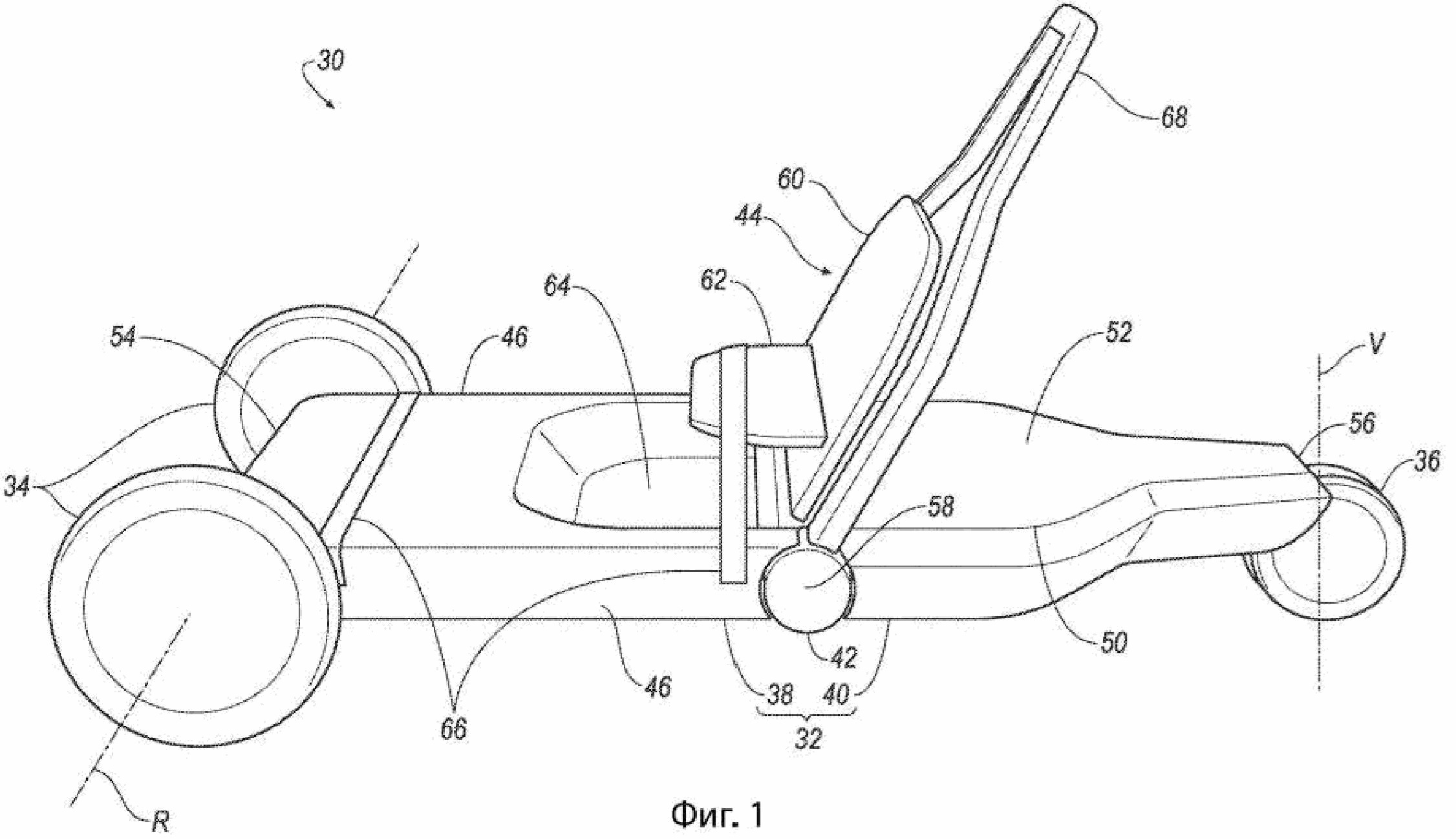
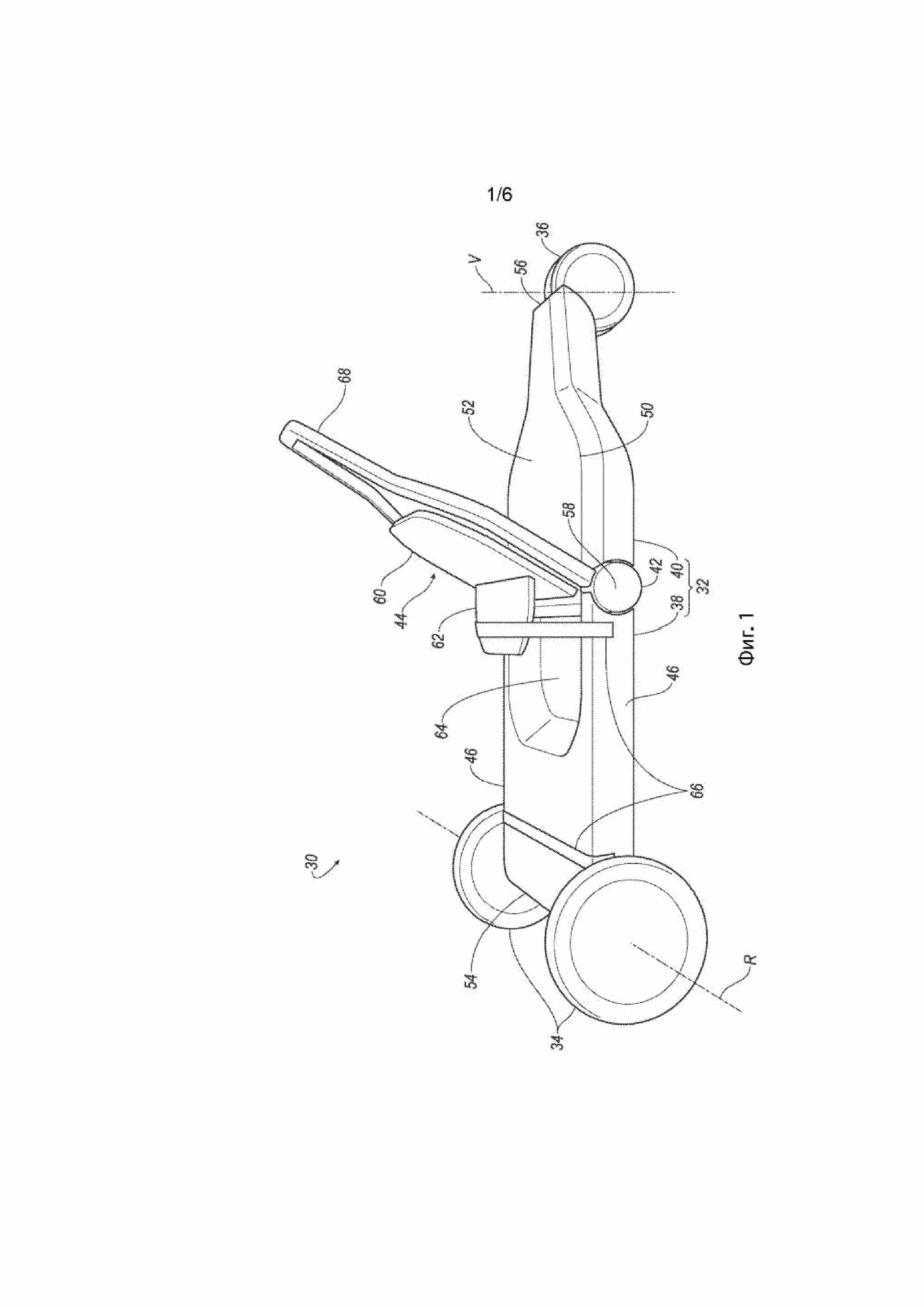
Фиг. 1 представляет собой вид сбоку в перспективе скутера в пассажирском положении.
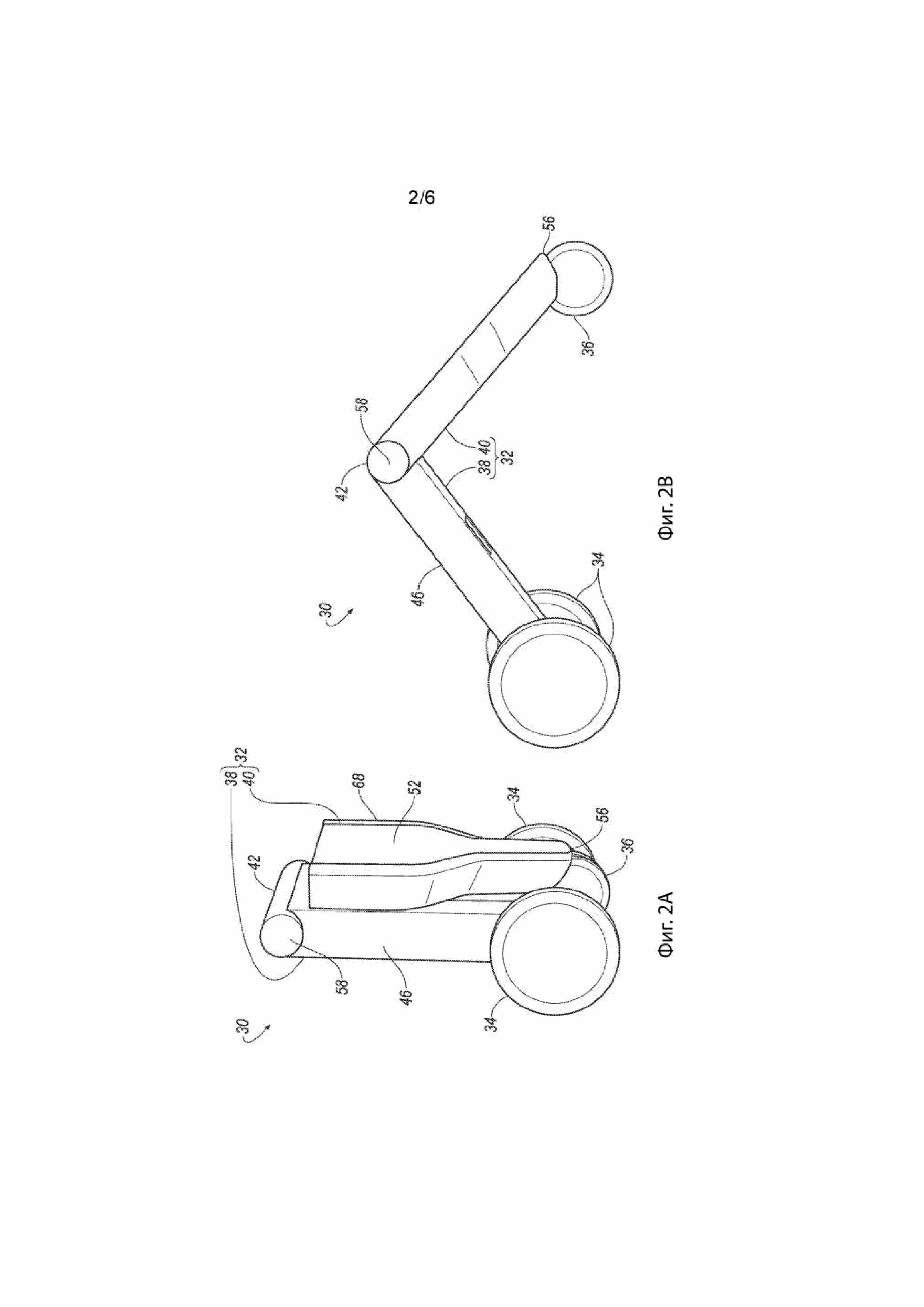
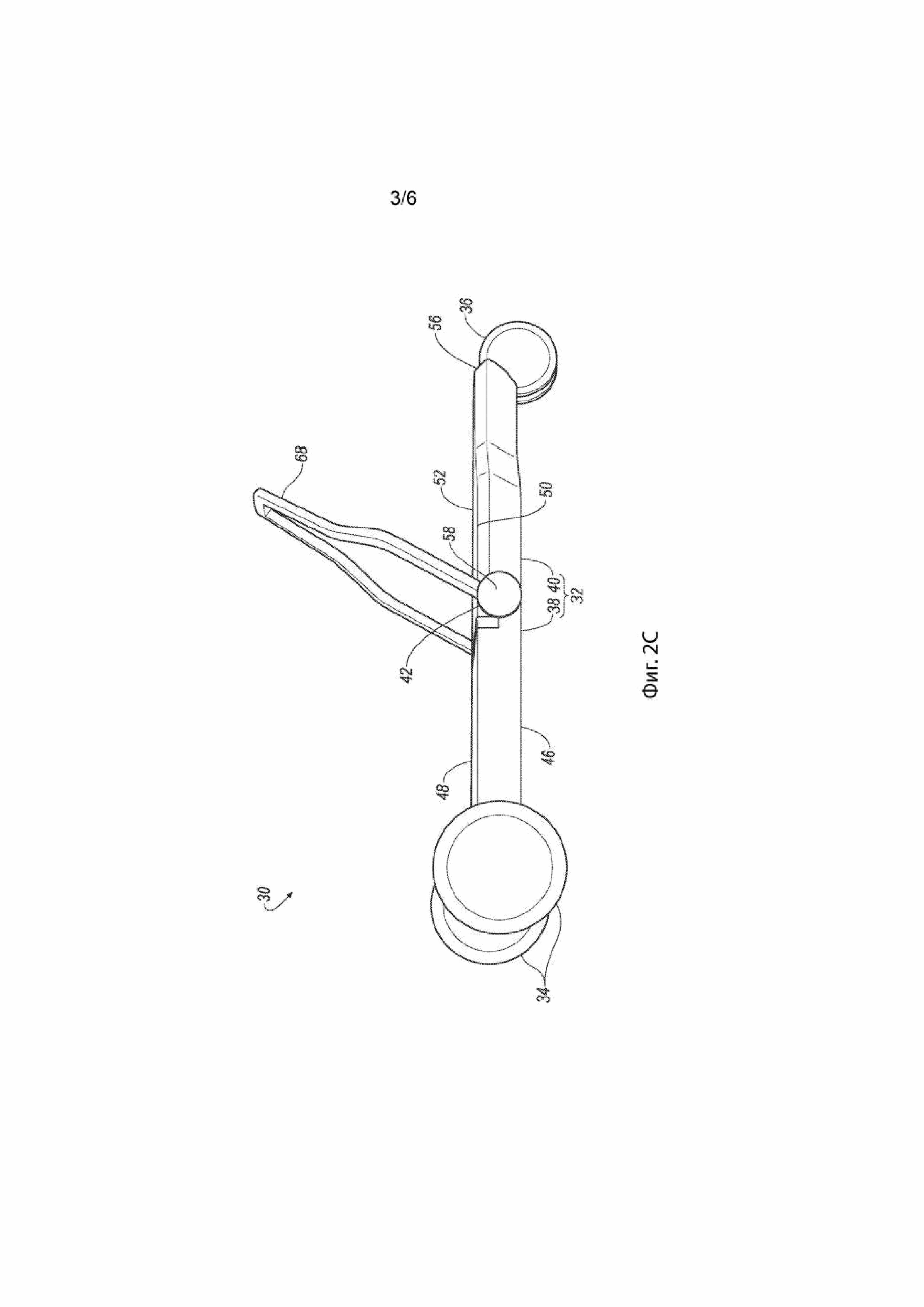
Фиг. 2A–C представляют собой виды сбоку скутера по фиг. 1 в сложенном положении, переходном из сложенного положения в грузовое положение, и в грузовом положении, соответственно.
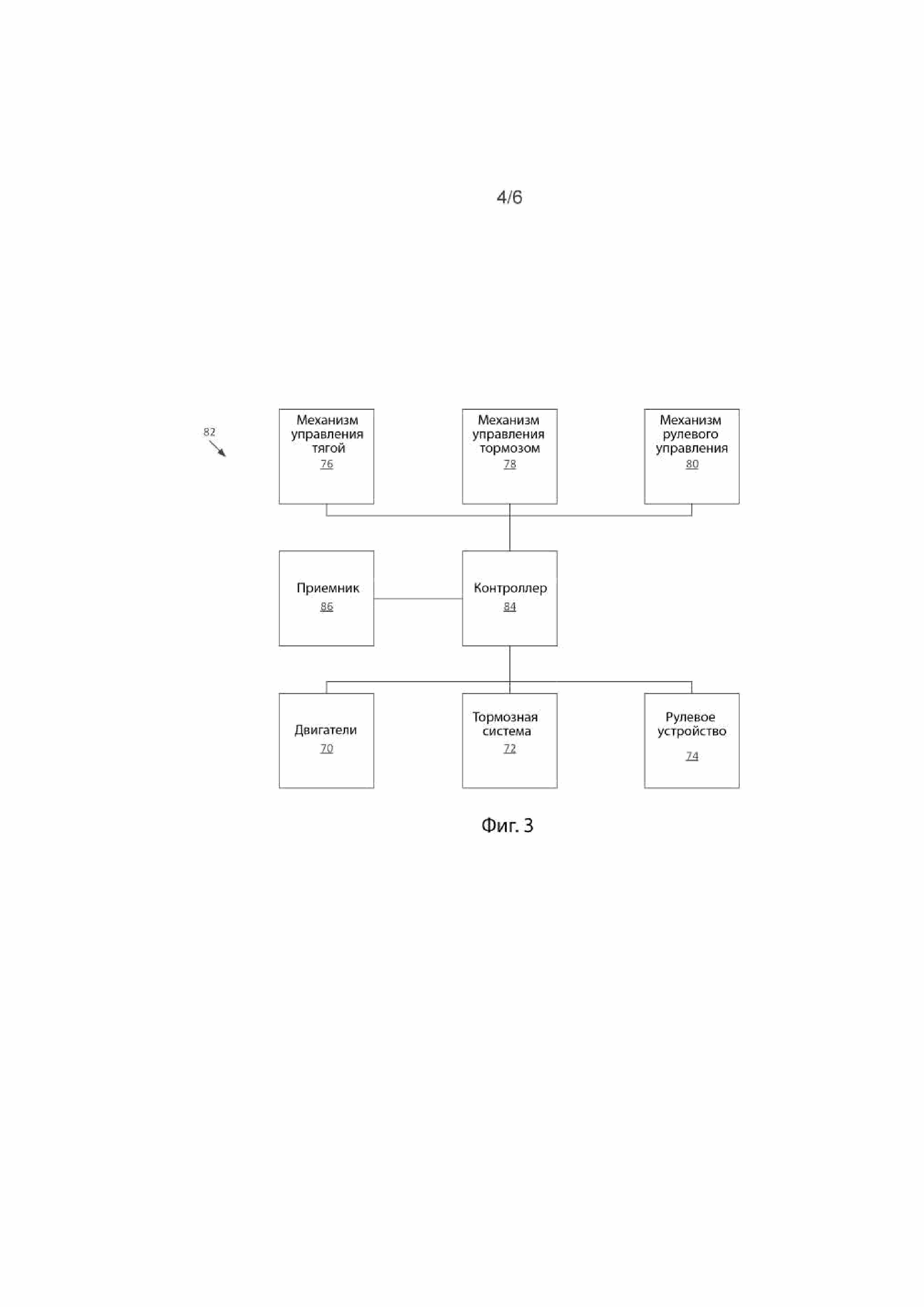
Фиг. 3 представляет собой структурную схему системы управления скутера по фиг. 1.
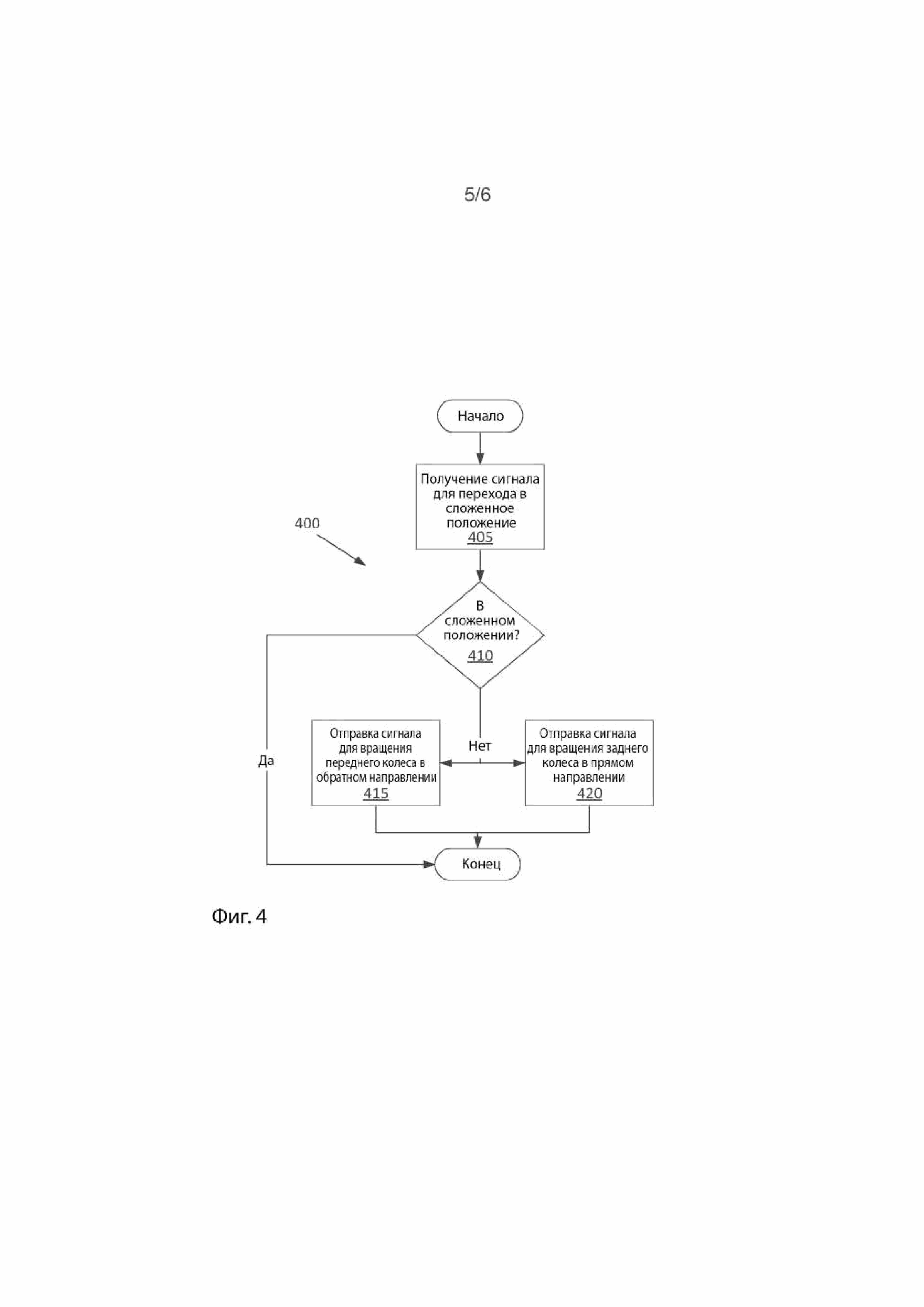
Фиг. 4 представляет собой блок-схему процесса перехода скутера по фиг. 1 в сложенное положение.
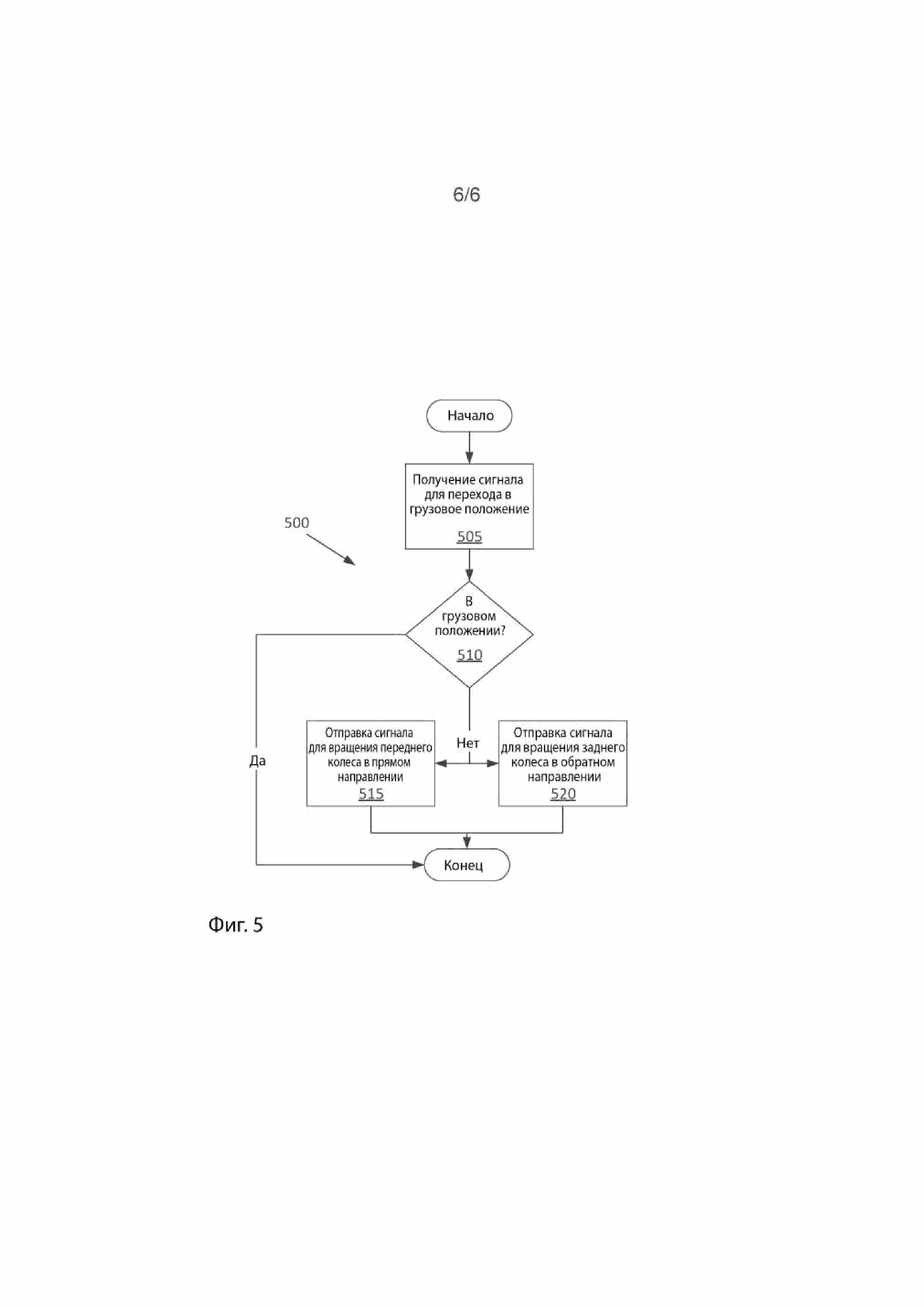
Фиг. 5 представляет собой блок-схему процесса перехода скутера по фиг. 1 в грузовое положение.
Подробное описание сущности изобретения
Согласно фигурам, на которых одинаковые числовые обозначения указывают одинаковые элементы на нескольких видах, скутер 30 содержит платформу 32, два передних колеса 34, соединенных с передним концом платформы 32, и по меньшей мере одно заднее колесо 36, соединенное с задним концом платформы 32. Платформа 32 содержит переднюю платформу 38 и платформу 40 водителя, соединенные с возможностью вращения шарниром 42. Конкретно, передняя платформа 38 шарнирно соединена с платформой 40 водителя. Передняя платформа 38 может содержать складное сиденье 44, имеющее открытое положение (показанное на фиг. 1) и закрытое положение (показанное на фиг. 2A–C). Передняя платформа 38 имеет плоскую поверхность 48, а платформа водителя имеет плоскую поверхность 52. Скутер 30 выполнен с возможностью перемещения из сложенного положения, в котором плоские поверхности 48, 52 по существу параллельны друг другу, и грузового положения, в котором плоские поверхности 48, 52 расположены в одной плоскости. Конкретно, скутер 30 может перемещаться между сложенным положением, в котором передняя платформа и платформа водителя 38, 40 ориентированы в вертикальном направлении и по существу параллельны друг другу (как показано на фиг. 2A); грузовым положением, в котором передняя платформа и платформа водителя 38, 40 выровнены в горизонтальном направлении, а складное сиденье 44 находится в закрытом положении (как показано на фиг. 2C); и пассажирским положением, в котором передняя платформа и платформа водителя 38, 40 выровнены в горизонтальном направлении и выровнены друг с другом в осевом направлении, а складное сиденье 44 находится в открытом положении (как показано на фиг. 1).
Скутер 30 демонстрирует универсальность, эффективно действуя в многочисленных ситуациях в городских условиях. В пассажирском положении скутер 30 может перевозить пассажиров более рентабельно и энергетически эффективно чем, например, такси. Например, родители могут перевозить своих детей общественным транспортом, а затем проехать «последнюю милю» на скутере 30. Скутер 30 может перевозить, например, одного водителя и одного взрослого пассажира или двоих детей. В грузовом положении скутер 30 может перевозить грузы более рентабельно, более эффективно и с меньшим загрязнением окружающей среды чем, например, грузовой фургон. Скутер 30 в грузовом положении имеет большую грузоподъемность чем, например, велосипед. Скутер 30 может перевозить поддон, загруженный, например, вилочным погрузчиком, или может перевозить несколько небольших предметов, например, приобретенных водителем. В сложенном положении скутер 30 занимает значительно меньше места чем такси, грузовой фургон или велосипед, например, прокатный или находящийся в общем пользовании велосипед.
Согласно фиг. 1 и 2C, передняя платформа 38 может быть расположена горизонтально на высоте оси вращения R передних колес 34, когда скутер 30 находится в грузовом или пассажирском положении. Передняя платформа 38 содержит боковые кромки 46 и плоскую поверхность 48, обращенную вверх и расположенную между боковыми кромками 46. Передняя платформа 38 поддерживает груз или пассажиров сверху плоской поверхности 48.
Плоская поверхность 48 передней платформы 38 длиннее параллельно оси вращения шарнира 42 чем толщина передней платформы 38, перпендикулярная плоской поверхности 48. Плоская поверхность 48 передней платформы 38 длиннее перпендикулярно оси вращения шарнира 42 чем толщина передней платформы 38. Конкретно, плоская поверхность 48 передней платформы 38 может иметь ширину (параллельную оси вращения R передних колес 34) 800 миллиметров и длину (в направлении вперед по ходу скутера 30) 1200 миллиметров, что соответствует размерам поддона EUR, представляющим собой стандартизированные размеры поддона, утвержденные Европейской ассоциацией производителей поддонов. В альтернативном варианте плоская поверхность 48 передней платформы 38 может иметь размеры, соответствующие другому стандартизированному поддону, часто перевозимому грузу или другие размеры, достаточные для размещения груза.
Платформа 40 водителя может быть расположена горизонтально на высоте оси вращения R передних колес 34, когда скутер 30 находится в грузовом или пассажирском положении. Платформа 40 водителя может содержать кромку 50 платформы водителя, ограничивающую плоскую поверхность 52, обращенную вверх.
Плоская поверхность 52 платформы 40 водителя длиннее параллельно оси вращения шарнира 42 чем толщина платформы 40 водителя, перпендикулярная плоской поверхности 52. Плоская поверхность 52 платформы 40 водителя длиннее перпендикулярно оси вращения шарнира 42 чем толщина платформы 40 водителя. Плоская поверхность 52 может поддерживать водителя скутера 30, стоящего на плоской поверхности 52.
Шарнир 42 соединяет с возможностью вращения переднюю платформу 38 и платформу 40 водителя. Конкретно, шарнир 42 соединен с возможностью вращения с передней платформой 38, и соединен с возможностью вращения с платформой 40 водителя. Передняя платформа 38 имеет диапазон поворота по меньшей мере 90° вокруг шарнира 42, и платформа 40 водителя имеет диапазон поворота по меньшей мере 90° вокруг шарнира 42. Ось вращения шарнира 42 параллельна по меньшей мере одной из оси вращения R передних колес 34 и оси вращения задних колес 36.
Согласно фиг. 1, скутер 30 может содержать фонари видимости 54, 56, 58, такие как фары 54, тормозные фонари 56 и габаритные фонари 58. Фары 54 могут быть расположены на переднем конце передней платформы 38 и направлены вперед. Фары 54 могут быть освещены, когда так решил водитель или постоянно, когда скутер 30 находится в грузовом или пассажирском положении. Тормозные фонари 56 могут быть расположены на заднем конце платформы 40 водителя и направлены назад. Тормозные фонари 56 могут быть освещены, когда транспортное средство тормозит или постоянно, когда транспортное средство находится в грузовом или пассажирском положении. Если тормозные фонари 56 освещены постоянно, когда скутер 30 находится в грузовом или пассажирском положении, тормозные фонари 56 могут быть освещены более ярко, когда скутер 30 тормозит. Габаритные фонари 58 могут быть расположены на шарнире 42, или на боковых кромках 46 передней платформы 38, или на кромке 50 платформы водителя. Габаритные фонари 58 могут быть освещены постоянно, когда скутер 30 находится в грузовом или пассажирском положении.
Также согласно фиг. 1, передняя платформа 38 может содержать складное сиденье 44. Сиденье 44 соединено с передней платформой 38. Складное сиденье 44 может содержать спинку 60 складного сиденья, соединенную с возможностью вращения с шарниром 42, и дно 62 складного сиденья, соединенное с возможностью вращения со спинкой 60 сиденья. Складное сиденье 44 выполнено с возможностью перемещения из закрытого положения в открытое положение; конкретно, складное сиденье 44 выполнено с возможностью перемещения относительно передней платформы 38 из закрытого положения в открытое положение. Складное сиденье 44 имеет открытое положение, в котором пассажир может сидеть на складном сиденье 44; и закрытое положение, в котором складное сиденье 44 сложено на передней платформе 38. Складное сиденье 44 в закрытом положении может быть заподлицо с плоской поверхностью 48 передней платформы 38.
Спинка 60 складного сиденья может быть соединена с возможностью вращения с шарниром 42; в альтернативном варианте спинка 60 складного сиденья может быть соединена с возможностью вращения с передней платформой 38. Спинка 60 складного сиденья может поворачиваться из положения, параллельного передней платформе 38, в вертикальное положение, перпендикулярное передней платформе 38. В вертикальном положении спинка 60 складного сиденья может быть поднята вверх, предоставляя поддержку спины пассажиру, сидящему на складном сиденье 44.
Дно 62 складного сиденья может быть соединено с возможностью вращения со спинкой 60 складного сиденья. Когда спинка 60 складного сиденья находится в вертикальном положении, дно 62 складного сиденья может поворачиваться из положения, параллельного спинке 60 в горизонтальное положение, соединяясь одним концом со спинкой 60 складного сиденья. В горизонтальном положении дно 62 складного сиденья может предоставлять поддержку пассажиру, сидящему на складном сиденье 44.
Передняя платформа 38 может содержать углубление 64 в плоской поверхности 48. Углубление 64 может иметь размеры, позволяющие принимать складное сиденье 44 в закрытом положении. Глубина углубления 64 может быть по существу такой же как толщина складного сиденья 44 в закрытом положении. Складное сиденье 44 может быть заподлицо с плоской поверхностью 48 передней платформы 38, когда складное сиденье 44 находится в закрытом положении в углублении 64.
Ремень 66 может быть расположен поперек передней платформы 38. Конкретно, ремень 66 может быть расположен поперек плоской поверхности 48 передней платформы 38, когда складное сиденье 44 находится в закрытом положении, и может быть расположен поперек дна 62 сиденья, когда сиденье 44 находится в открытом положении. Ремень 66 или несколько ремней 66 могут быть закреплены на боковых кромках 46 передней платформы 38 или могут втягиваться в переднюю платформу 38 на боковых кромках 46. Каждый ремень 66 может содержать храповой натяжной механизм и/или пряжку и зажим. Ремни 66 могут быть выполнены из ткани.
Руль 68 может быть соединен с возможностью вращения с шарниром 42; в альтернативном варианте руль 68 может быть соединен с возможностью вращения с платформой 40 водителя. Руль 68 выполнен с возможностью перемещения из сложенного положения, прилегающего к кромке платформы 40 водителя (как показано на фиг. 2A–B) в положение готовности, перпендикулярное платформе 40 водителя (как показано на фиг. 1 и 2C). Руль 68 поворачивается между сложенным положением, прилегающим к кромке 50 платформы водителя, и положением готовности, перпендикулярным платформе 40 водителя. В сложенном положении руль 68 может быть заподлицо с плоской поверхностью 52. В положении готовности руль 68 может подниматься приблизительно до высоты талии водителя.
Передние колеса 34 соединены с возможностью вращения с передней платформой 38, конкретно, с передним концом передней платформы 38. Передние колеса 34 могут быть расположены на боковых кромках 46 передней платформы 38. Передние колеса 34 могут быть зафиксированы в обращенном вперед направлении, то есть, быть неуправляемыми.
Задние колеса 36 соединены с возможностью вращения с задним концом платформы 40 водителя. Платформа 40 водителя может иметь одно или два задних колеса 36, соединенных с возможностью вращения с платформой 40 водителя. Задние колеса 36 могут быть центрированы в боковом направлении относительно скутера 30. Задние колеса 36 могут поворачиваться относительно вертикальной оси V, то есть, управлять скутером 30. Задние колеса 36 могут иметь меньший диаметр чем передние колеса 34.
Двигатель 70 расположен в одном из передних колес 34 и задних колес 36 и соединен с ним с возможностью привода. Двигатель 70 может быть расположен также в другом из передних колес 34 и задних колес 36, и соединен с ним с возможностью привода. В альтернативном варианте по меньшей мере одно переднее колесо 34 и по меньшей мере одно заднее колесо 36 может иметь двигатель 70, расположенный в нем. В дополнительном альтернативном варианте каждое из передних и задних колес 34, 36 может иметь двигатель 70, расположенный в нем. Первый двигатель 70 расположен в переднем колесе 34 и соединен с ним с возможностью привода, а второй двигатель 70 расположен в заднем колесе 36 и соединен с ним с возможностью привода. Двигатели 70 соединены с возможностью вращения с передними колесами 34 и передней платформой 38, или с задними колесами 36 и платформой 40 водителя. Двигатели 70 вращают колеса 34, 36 относительно платформ 38, 40. Двигатели 70 могут представлять собой электрические двигатели.
По меньшей мере некоторые из колес 34, 36 могут быть оборудованы тормозами 72 (не изображены). Тормоза 72 могут быть любого подходящего типа, в том числе фрикционными тормозами, такими как ленточные, барабанные или дисковые тормоза; электромагнитными тормозами или регенеративными тормозами.
Согласно фиг. 3, рулевое устройство 74 может быть соединено с задними колесами 36 и с платформой 40 водителя. Рулевое устройство 74 может представлять собой любой подходящий механизм, поворачивающий задние колеса 36 относительно вертикальной оси V, например, линейный привод или пару линейных приводов.
Руль 68 может содержать механизм 76 управления тягой. Механизм 76 управления тягой может иметь форму манжеты и вращаться относительно руля 68, указывая желаемое ускорение или скорость. Механизм 76 управления тягой может быть соединен с двигателями 70.
Руль 68 может содержать механизм 78 управления тормозом. Механизм 78 управления тормозом может представлять собой, например, рычаг или зажимную рукоятку. Водитель может, например, сжимать механизм 78 управления тормозом, указывая, что желает затормозить. Механизм 78 управления тормозом может быть соединен с тормозами 72.
Руль 68 может содержать механизм 80 рулевого управления. Часть руля 68 может перемещаться относительно руля 68 или может регистрировать обратную связь по давлению, например от рук водителя, определяющую желаемый угол поворота. Механизм 80 рулевого управления может быть соединен с рулевым устройством 74.
Также согласно фиг. 3, скутер 30 может содержать систему 82 управления. Система 82 управления содержит контроллер 84, соединенный с механизмом 76 управления тягой, механизмом 78 управления тормозом, механизмом 80 рулевого управления, приемником 86, двигателями 70, тормозами 72, и рулевым устройством 74. Компоненты системы 82 управления могут быть соединены через сеть 88 передачи данных.
Контроллер 84 может представлять собой контроллер на основе микропроцессора. Контроллер 84 может содержать процессор, запоминающее устройство и т.п. Запоминающее устройство контроллера 84 может хранить команды, исполняемые процессором. Контроллер 84 соединен с двигателями 70, например, с первым двигателем 70 и вторым двигателем 70.
Приемник 86 принимает радиосигналы. Указанные сигналы могут передаваться в любом приемлемом стандарте, таком как Wi-Fi, Bluetooth или стандарт сигналов сотовой связи, такой как 4G LTE. В альтернативном варианте приемник 86 может представлять собой соединитель линии передачи данных, используемый для связи со станцией проката (описано ниже). Приемник 86 может представлять собой первый соединитель линии передачи данных. Приемник 86 соединен с контроллером 84.
Система 82 управления может передавать сигналы через сеть 88 передачи данных, такую как шина локальной сети контроллера (CAN), Ethernet и/или любая другая проводная или беспроводная сеть передачи данных.
Контроллер 84 запрограммирован для управления двигателями 70, например, первым двигателем 70 и вторым двигателем 70, перемещающими скутер из сложенного положения, в котором передняя платформа и платформа водителя 38, 40 по существу параллельны друг другу, в грузовое положение, в котором передняя платформа и платформа водителя 38, 40 выровнены друг с другом в осевом направлении. Контроллер 84 может быть запрограммирован отдавать команду двигателям 70 на вращение передних колес 34 и задних колес 36 в противоположных направлениях для перемещения скутера 30 между сложенным положением и грузовым положением.
Согласно фиг. 2A–C, когда водитель желает перевести скутер 30 из грузового положения (показанного на фиг. 2C) в сложенное положение (показанное на фиг. 2A), сначала он поворачивает руль 68 из положения готовности в сложенное положение. Затем водитель отправляет сигнал в приемник 86, соединенный с контроллером 84. Контроллер 84 отдает команду двигателям 70 для вращения передних колес 34 в обратном направлении, а задних колес 36 в прямом направлении. Как показано на фиг. 2B, по мере уменьшения расстояния между передними колесами 34 и задними колесами 36 шарнир 42 поднимается, а передняя платформа и платформа водителя 38, 40 поворачиваются вокруг шарнира 42 из горизонтального в вертикальное положение. Когда платформы 38, 40 ориентированы вертикально, как показано на фиг. 2C, контроллер 84 отдает команду двигателям 70 остановить вращение колес 34, 36. Передняя платформа 38 имеет по существу такую же длину, как платформа 40 водителя, поэтому, когда скутер 30 находится в сложенном положении, передняя платформа и платформа водителя 38, 40 ориентированы вертикально, а передние и задние колеса 36 касаются земли.
Когда водитель желает перевести скутер 30 из сложенного положения в грузовое положение, водитель отправляет сигнал в приемник 86, соединенный с контроллером 84. Контроллер 84 отдает команду двигателям 70 в передних колесах 34 для вращения передних колес 34 в прямом направлении, и отдает команду двигателям 70 в задних колесах 36 для вращения задних колес 36 в обратном направлении. По мере увеличения расстояния между передними колесами 34 и задними колесами 36 шарнир 42 опускается, а передняя платформа и платформа водителя 38, 40 поворачиваются вокруг шарнира 42 из вертикального в горизонтальное положение. Когда платформы 38, 40 расположены горизонтально, контроллер 84 отдает команду двигателям 70 остановить вращение колес 34, 36. Затем руль 68 поворачивается из сложенного положения в положение готовности.
Согласно фиг. 1, когда водитель желает перевести скутер 30 из грузового положения в пассажирское положение, водитель вытягивает спинку 60 складного сиденья из положения, параллельного передней платформе 38, в вертикальное положение. Затем водитель опускает дно 62 сиденья из положения, параллельного спинке 60 складного сиденья в горизонтальное положение. Когда водитель желает перевести скутер 30 из пассажирского положения в грузовое положение (возможно, для перехода в сложенное положение), водитель выполняет эти этапы в обратном порядке.
Фиг. 4 представляет собой блок-схему процесса, иллюстрирующую типовой процесс 400 перехода скутера 30 в сложенное положение. Процесс 400 начинается в блоке 405, в котором контроллер 84 получает сигнал от приемника 86, отдающего команду для перехода скутера 30 в сложенное положение. Приемник 86 может предоставлять сигнал контроллеру 84 в ответ на получение приемником 86, например, сигнала от водителя.
Далее, в блоке 410 принятия решения контроллер 84 определяет, не находится ли скутер 30 уже в сложенном положении. Если скутер 30 находится в сложенном положении, то процесс 400 завершается.
Если скутер 30 не находится в сложенном положении, далее, в блоке 415, контроллер 84 отправляет сигнал двигателю 70, соединенному с передним колесом 34, для вращения переднего колеса 34 в обратном направлении на предварительно установленное расстояние. Одновременно в блоке 420 контроллер 84 отправляет сигнал двигателю 70, соединенному с задним колесом 36, для вращения заднего колеса 34 в прямом направлении на предварительно установленное расстояние. Указанные предварительно установленные расстояния могут быть одинаковыми и могут составлять приблизительно половину длины скутера 30. В альтернативном варианте контроллер 84 может отправлять сигнал двигателю 70, соединенному с одним из переднего колеса 34 и заднего колеса 36 для вращения этого колеса назад или вперед, соответственно, на предварительно установленное расстояние, составляющее приблизительно полную длину скутера 30, и контроллер 84 одновременно может отправлять сигнал тормозам 72, соединенным с другим из переднего колеса 34 и заднего колеса 36 для остановки вращения этого колеса. После блоков 415 и 420 процесс 400 завершается.
Фиг. 5 представляет собой блок-схему процесса, иллюстрирующую типовой процесс 500 перехода скутера 30 в грузовое положение. Процесс 500 начинается в блоке 505, в котором контроллер 84 получает сигнал от приемника 86, отдающего команду для перехода скутера 30 в грузовое положение.
Далее, в блоке 510 принятия решения контроллер 84 определяет, не находится ли скутер 30 уже в грузовом положении. Если скутер 30 находится в грузовом положении, то процесс 500 завершается.
Если скутер 30 не находится в грузовом положении, далее, в блоке 515, контроллер 84 отправляет сигнал двигателю 70, соединенному с передним колесом 34, для вращения переднего колеса 34 в прямом направлении на предварительно установленное расстояние. Одновременно в блоке 520 контроллер 84 отправляет сигнал двигателю 70, соединенному с задним колесом 36, для вращения заднего колеса 34 в обратном направлении на предварительно установленное расстояние. Указанные предварительно установленные расстояния могут быть одинаковыми и могут составлять приблизительно половину длины скутера 30. В альтернативном варианте контроллер 84 может отправлять сигнал двигателю 70, соединенному с одним из переднего колеса 34 и заднего колеса 36 для вращения этого колеса вперед или назад, соответственно, на предварительно установленное расстояние, составляющее приблизительно полную длину скутера 30, и контроллер 84 одновременно может отправлять сигнал тормозам 72, соединенным с другим из переднего колеса 34 и заднего колеса 36 для остановки вращения этого колеса. После блоков 515 и 520 процесс 500 завершается.
Скутер 30 может быть совместим со станциями проката (не показано). Станция проката может содержать интерфейс пользователя, на котором водитель может выбрать опции и предоставить информацию и/или оплату для того, чтобы одолжить или арендовать скутер 30.
Каждая станция проката может содержать ряд механизмов блокировки. Механизмы блокировки выполнены с возможностью зацепления с множеством скутеров 30. Механизм блокировки может иметь возможность перехода между заблокированным положением, зацепленным со скутером 30, и разблокированным положением, расцепленным со скутером 30.
Станция проката содержит второй соединитель линии передачи данных. Станция проката может содержать множество соединителей линии передачи данных для соединения со скутерами 30, зацепленными с механизмами блокировки на станции проката. Первый соединитель линии передачи данных имеет коммуникационное соединение со вторым соединителем линии передачи данных, когда механизм блокировки находится в заблокированном положении.
Описание данного изобретения имеет иллюстрационный характер, и следует понимать, что используемая терминология предназначена для обозначения соответствия характеру слов описания, а не для ограничения. Возможны многие модификации и вариации данного изобретения в свете изложенных выше принципов, и данное изобретение может быть реализовано на практике другим способом, отличающимся от конкретно описанных.
Скутер с возможностью скрытой переноски
Складной самокат
Транспортные микротележки
Переносное электрическое транспортное средство с шарнирными колесами
Тележка с изменяемой конфигурацией
Универсальное городское электрическое транспортное устройство и система

