Результат интеллектуальной деятельности: СПОСОБ ОЦЕНКИ ВНЕШНЕЙ СИЛЫ, ДЕЙСТВУЮЩЕЙ НА ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к способу оценки внешней силы, действующей на электрогидростатический привод, а также к программируемому блоку управления для осуществления такого способа.
Уровень техники
На летательных аппаратах рули позволяют изменять поток окружающего воздуха на поверхности летательного аппарата, чтобы управлять ориентацией летательного аппарата в пространстве.
На самолете рули управления полетом включают в себя, например, первичные рули, приводимые в действие в фазах полета, и вторичные рули (отклоняемые предкрылки, закрылки), приводимые в действие только в некоторых фазах на низкой скорости, в частности, в фазах взлета и приземления.
Среди первичных рулей элероны, находящиеся на концах крыльев самолета, позволяют контролировать движение крена самолета.
Эти рули установлены с возможностью поворота относительно конструкции крыла самолета, и каждый руль приводят в действие механически при помощи одного или нескольких приводов, установленных в крыле самолета.
На некоторых самолетах приводы, используемые для приведения в действие рулей, являются электрогидростатическими приводами или ЕНА (“Electro-Hydrostatic Actuator”). Как правило, эти приводы содержат электрический двигатель, специальный насос и гидроцилиндр, а также автономный запас текучей среды. Гидравлический двигатель приводит в действие насос, который нагнетает текучую среду в камеры гидроцилиндра для перемещения поршня.
Приводом этого типа управляют при помощи электрического командного сигнала, генерируемого электронным блоком управления. Электрический командный сигнал позволяет регулировать скорость вращения двигателя.
Во время работы гидроцилиндр подвергается действию внешних сил, создаваемых, в частности, аэродинамическими усилиями, действующими на аэродинамическую поверхность. Следовательно, скорость вращения электрического двигателя необходимо регулировать в реальном времени, чтобы гидроцилиндр мог создавать силу реакции, противодействующую внешним силам, действию которых подвергается гидроцилиндр, чтобы удерживать руль в заданном положении.
Однако чтобы избежать повреждения конструкции самолета и/или руля, может возникнуть необходимость в ограничении силы реакции, создаваемой гидроцилиндром. Сила реакции, создаваемая гидроцилиндром, не должна превышать заранее определенное предельное значение, как правило, устанавливаемое конструкторами летательных аппаратов.
Известное решение для ограничения силы реакции состоит в коррекции электрического командного сигнала, поступающего на электрический двигатель, когда разность давлений, обнаруживаемая в камерах гидроцилиндра (эта разность давлений по существу отражает силу реакции, создаваемую гидроцилиндром) приближается к заранее определенному пороговому значению. При этом электрическим двигателем управляют таким образом, чтобы разность давлений в камерах гидроцилиндра оставалась ниже этого порогового значения.
Для осуществления такой коррекции необходимо измерять давление в камерах гидроцилиндра при помощи датчиков давления. Можно также предусмотреть непосредственное измерение внешней силы, действующей на гидроцилиндр, при помощи датчика усилия. Однако в обоих случаях необходимо предусматривать специальные датчики, что увеличивает габарит и массу привода и предполагает использование дополнительного электронного оборудования для обработки сигналов измерения, поступающих от этих датчиков.
Раскрытие изобретения
Настоящее изобретение призвано предложить решение для определения внешней силы, действующей на электрогидростатический привод, не прибегая к использованию датчиков, измеряющих разность давлений в камерах гидроцилиндра или внешнюю силу.
В рамках настоящего изобретения эта задача решается при помощи способа оценки внешней силы, действующей на электрогидростатический привод, при этом привод содержит гидроцилиндр, включающий в себя первую камеру, вторую камеру и поршень, находящийся между первой камерой и второй камерой; насос, выполненный с возможностью нагнетания текучей среды в камеры для управления перемещением поршня; и электрический двигатель, приводящий в действие насос; при этом внешняя сила является осевой силой, действующей на гидроцилиндр,
при этом способ содержит этапы, на которых:
- при помощи по меньшей мере одного наблюдателя состояния оценивают динамическую составляющую и статическую составляющую эквивалентной разности давлений текучей среды между первой камерой и второй камерой на основании скорости вращения электрического двигателя, положения поршня и тока питания электрического двигателя,
- при помощи модуля пост-обработки оценивают внешнюю силу как комбинацию оценочных динамической составляющей и статической составляющей разности давлений текучей среды.
Предложенный способ основан на оценке, с одной стороны, динамической составляющей эквивалентной разности давлений и, с другой стороны, статической составляющей эквивалентной разности давлений.
Две составляющие разности давлений оценивают раздельно на основании скорости вращения электрического двигателя, положения поршня и тока питания электрического двигателя, причем эти три переменные, как правило, уже определены для автоматического регулирования положения привода, что позволяет избежать использования дополнительных датчиков давления или силы. (Вместе с тем, такие датчики можно, в случае необходимости, использовать для повышения достоверности измерений).
Затем внешнюю силу, действующую на привод, просто реконструируют, комбинируя две составляющие, полученные при помощи наблюдателя состояния.
Согласно возможному варианту осуществления изобретения, способ содержит этапы, на которых:
- при помощи первого наблюдателя состояния оценивают динамическую составляющую эквивалентной разности давлений текучей среды между первой камерой и второй камерой и скорость перемещения поршня на основании скорости вращения электрического двигателя и положения поршня, и
- при помощи второго наблюдателя состояния оценивают статическую составляющую эквивалентной разности давлений текучей среды между первой камерой и второй камерой на основании скорости перемещения поршня, оцененной при помощи первого наблюдателя, скорости вращения электрического двигателя и тока питания электрического двигателя.
Использование двух наблюдателей состояния в виде каскада позволяет оценивать последовательно динамическую составляющую эквивалентной разности давлений и статическую составляющую эквивалентной разности давлений, что позволяет преодолеть трудности оценки эквивалентной разности давлений при помощи только одного наблюдателя состояния.
Кроме того, предложенный способ может иметь следующие признаки:
- первый наблюдатель использует скорость вращения электрического двигателя в качестве входных данных и положение поршня в качестве измеренных выходных данных,
- второй наблюдатель использует скорость вращения электрического двигателя и ток питания электрического двигателя в качестве входных данных, а переменную, комбинирующую скорость перемещения поршня и скорость вращения электрического двигателя, в качестве измеренных выходных данных,
- динамическую составляющую эквивалентной разности давлений текучей среды оценивают при помощи первого наблюдателя на основании первой математической модели привода, в которой внешняя сила, действующая на привод, является нулевой,
- первая математическая модель имеет следующий вид:

где  является оценочным положением поршня,
является оценочным положением поршня,  является оценочной скоростью поршня,
является оценочной скоростью поршня,  является оценочной динамической составляющей эквивалентной разности давлений,
является оценочной динамической составляющей эквивалентной разности давлений,  является скоростью вращения электрического двигателя,
является скоростью вращения электрического двигателя,  является измеренным положением поршня,
является измеренным положением поршня,  ,
,  ,
,  являются постоянными параметрами модели, и
являются постоянными параметрами модели, и  ,
,  ,
,  являются коэффициентами усиления первого наблюдателя, регулирующими динамику и стабильность первого наблюдателя,
являются коэффициентами усиления первого наблюдателя, регулирующими динамику и стабильность первого наблюдателя,
- вторую статическую составляющую давления текучей среды оценивают при помощи второго наблюдателя на основании второй математической модели привода, в которой статическая составляющая эквивалентной разности давлений считается пропорциональной внешней силе,
- вторая математическая модель имеет следующий вид:
 ,
,
где  является переменной состояния, определяемой как
является переменной состояния, определяемой как  , и
, и
 является оценочной переменной состояния
является оценочной переменной состояния  ,
,  является оценочной статической составляющей эквивалентной разности давлений,
является оценочной статической составляющей эквивалентной разности давлений,  является измеренной переменной состояния
является измеренной переменной состояния  ,
,  является скоростью вращения электрического двигателя,
является скоростью вращения электрического двигателя,  является током питания электрического двигателя,
является током питания электрического двигателя,  ,
,  ,
,  и
и  являются постоянными параметрами модели, и
являются постоянными параметрами модели, и  и
и  являются коэффициентами усиления второго наблюдателя, регулирующими динамику и стабильность второго наблюдателя,
являются коэффициентами усиления второго наблюдателя, регулирующими динамику и стабильность второго наблюдателя,
- наблюдатель является наблюдателем детерминистского или схоластического типа,
- привод является приводом руля летательного аппарата.
Объектом изобретения является также способ управления электрогидростатическим приводом, при этом привод содержит гидроцилиндр, включающий в себя первую камеру, вторую камеру и поршень, находящийся между первой камерой и второй камерой; насос, выполненный с возможностью нагнетания текучей среды в камеры для управления перемещением поршня; и электрический двигатель, приводящий в действие насос, при помощи блока управления, осуществляющего этапы, на которых:
- блок управления генерирует командный сигнал для управления электрическим двигателем,
- блок управления оценивает внешнюю силу, действующую на электрогидростатический привод, при помощи описанного выше способа оценки,
- блок управления определяет переменную коррекции командного сигнала в зависимости от оценочной внешней силы, и
- блок управления применяет переменную коррекции командного сигнала таким образом, чтобы ограничить давление текучей среды в камерах гидроцилиндра.
Объектом изобретения является также блок управления электрогидростатическим приводом, при этом привод содержит гидроцилиндр, включающий в себя первую камеру и вторую камеру; насос, выполненный с возможностью нагнетания текучей среды в камеры для управления перемещением поршня; и электрический двигатель, приводящий в действие насос; при этом блок управления выполнен с возможностью генерировать командный сигнал для управления электрическим двигателем, оценивать внешнюю силу, действующую на электрогидростатический привод, при помощи описанного выше способа оценки, определять переменную коррекции командного сигнала в зависимости от оценочной внешней силы и применять переменную коррекции к командному сигналу таким образом, чтобы ограничивать давление текучей среды в камерах гидроцилиндра.
Объектами изобретения являются также электрогидростатический привод и соответствующий блок управления, при этом блок управления соответствует приведенному выше определению.
Описание чертежей
Другие признаки и преимущества будут более очевидны из нижеследующего описания, представленного исключительно в качестве иллюстративного и не ограничительного примера со ссылками на прилагаемые фигуры, на которых:
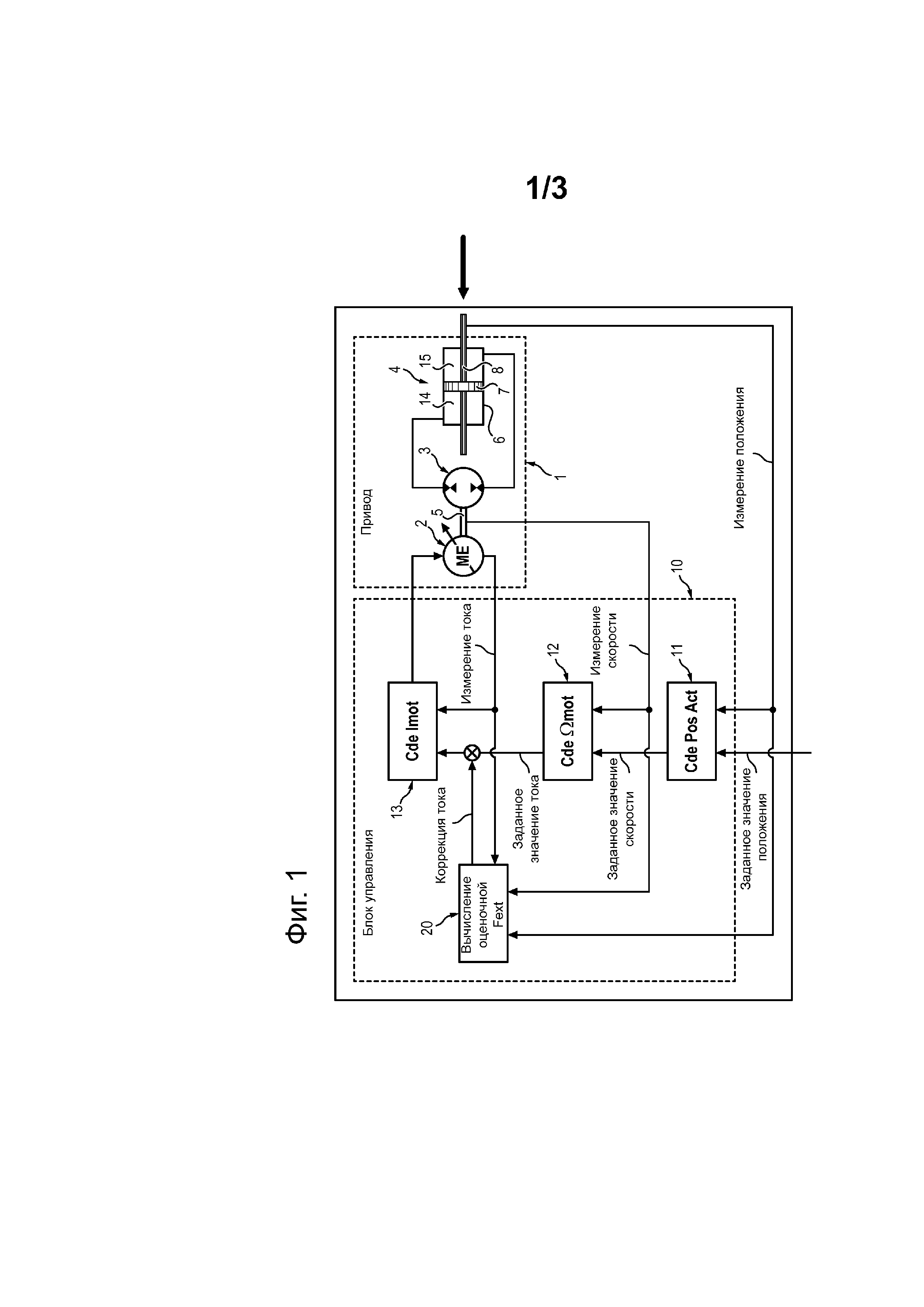
фиг. 1 - схема электрогидростатического привода и блока управления согласно варианту выполнения изобретения;
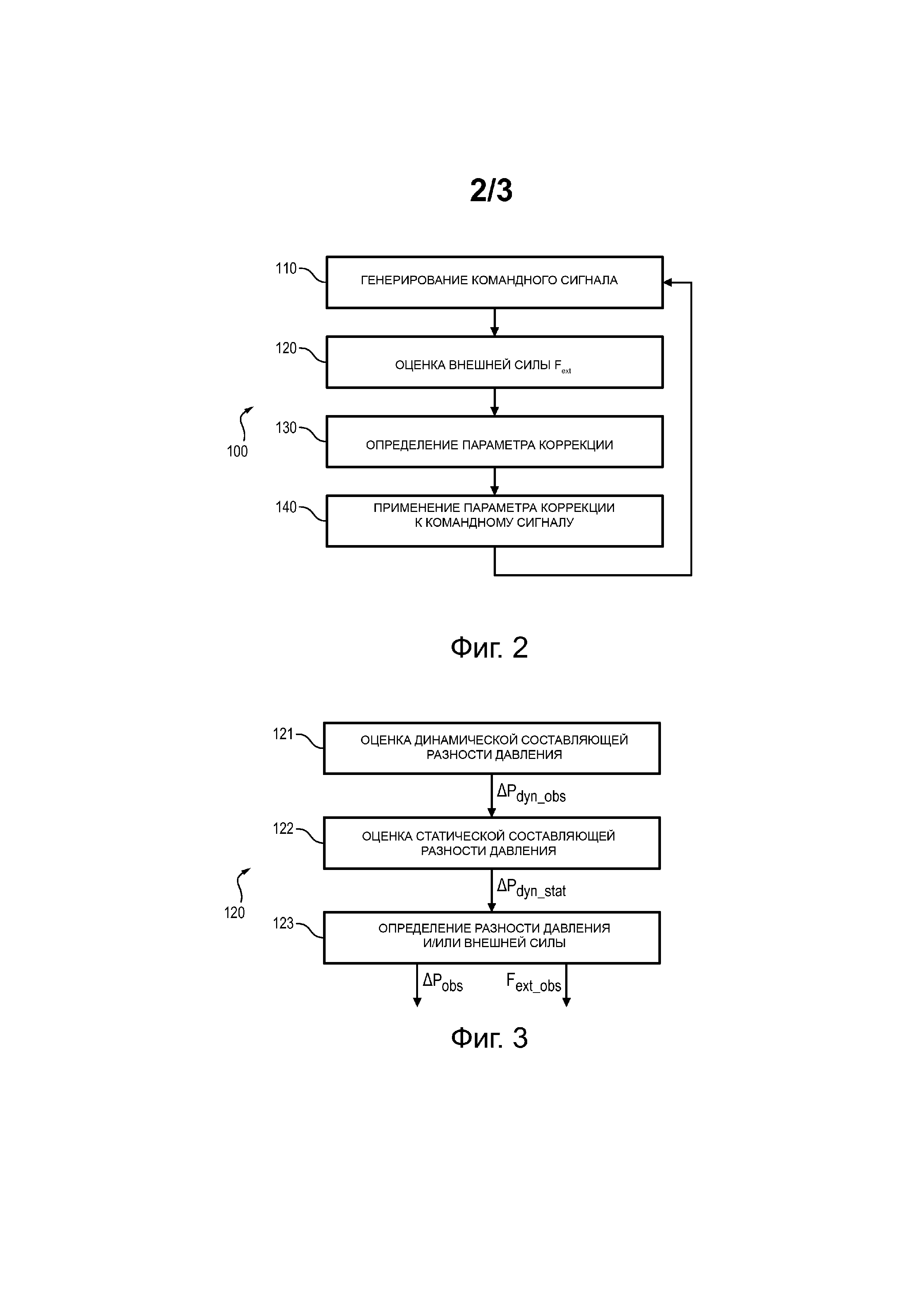
фиг. 2 - блок-схема этапов способа управления электрогидростатическим приводом, осуществляемого блоком управления;
фиг. 3 - блок-схема этапов способа оценки внешней силы, действующей на электрогидростатический привод;
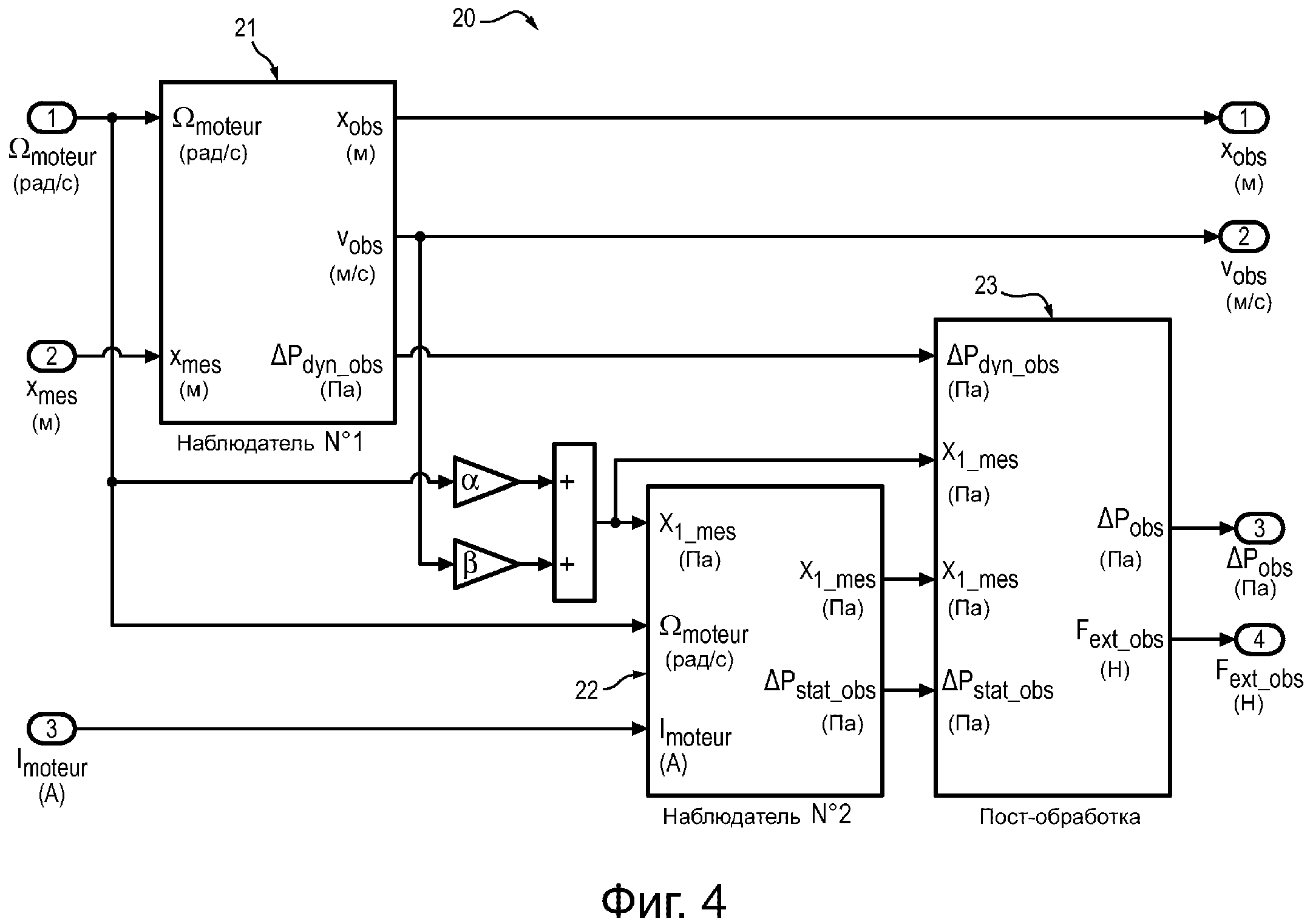
фиг. 4 - диаграмма, схематично иллюстрирующая способ оценки, представленный на фиг. 3.
Подробное описание варианта выполнения
Показанный на фиг. 1 электрогидростатический привод 1 содержит электрический двигатель 2, гидравлический насос 3 и гидроцилиндр 4.
Например, электрический двигатель 2 является синхронным двигателем с постоянным магнитами. Электрическим двигателем 2 управляет командный сигнал, позволяющий регулировать силу тока питания, протекающего в двигателе 2. В случае синхронного двигателя с постоянными магнитами ток питания является синусоидальным трехфазным током.
Гидравлический насос 3 является, например, насосом с фиксированным рабочим объемом. Насос 3 соединен с ротором электрического двигателя 2 через вал 5 насоса, при этом вал 5 насоса приводится во вращение электрическим двигателем 2.
Гидроцилиндр 4 содержит цилиндр 6, поршень 7, выполненный с возможностью перемещения в осевом направлении внутри цилиндра, и шток 8 поршня, установленный неподвижно на поршне. Цилиндр 6 и шток 7 поршня предназначены, например, для соединения соответственно с конструкцией летательного аппарата и с рулем летательного аппарата с целью перемещения руля относительно конструкции летательного аппарата.
Поршень 7 ограничивает внутри цилиндра 6 первую камеру 14 и вторую камеру 15, при этом обе камеры расположены внутри цилиндра 6 с двух сторон от поршня 7.
Когда электрический двигатель 2 приводит насос 3 во вращение, насос 3 нагнетает текучую среду внутрь первой камеры 14 и/или второй камеры 15 таким образом, чтобы перемещать поршень 7 внутри цилиндра 6 и регулировать, таким образом, положения руля относительно конструкции крыла.
Текучая среда, содержащаяся в первой камере 14, находится под первым давлением  , а текучая среда, содержащаяся во второй камере 15, находится под вторым давлением
, а текучая среда, содержащаяся во второй камере 15, находится под вторым давлением  .
.
Разность давлений текучей среды между двумя камерами 14 и 15 определяют как линейную комбинацию первого давления и второго давления .
В случае симметричного гидроцилиндра разность давлений  определяют как разность между первым давлением и вторым давлением :
определяют как разность между первым давлением и вторым давлением :
В случае несимметричного гидроцилиндра рассматриваемая разность давлений является эквивалентной разностью давлений  , вычисляемой следующим образом:
, вычисляемой следующим образом:
где  является сечением гидроцилиндра со стороны первой камеры 14, и
является сечением гидроцилиндра со стороны первой камеры 14, и  является сечением гидроцилиндра со стороны второй камеры 15.
является сечением гидроцилиндра со стороны второй камеры 15.
Кроме того, как показано на фиг. 1, электрогидростатический привод 1 подвергается действию внешней силы. В частности, внешняя сила  действует на шток 8 гидроцилиндра 4. Эту внешнюю силу создают, в частности, аэродинамические усилия, действующие на руль. Внешняя сила
действует на шток 8 гидроцилиндра 4. Эту внешнюю силу создают, в частности, аэродинамические усилия, действующие на руль. Внешняя сила  является осевой силой, то есть силой, направление которой параллельно направлению перемещения поршня 7 относительно цилиндра 6.
является осевой силой, то есть силой, направление которой параллельно направлению перемещения поршня 7 относительно цилиндра 6.
Электрическим двигателем 2 управляет блок 10 управления.
Блок 10 управления выполнен с возможностью принимать на входе сигнал заданного положения, сигнал измерения положения, сигнал измерения скорости вращения электрического двигателя (или вращения вала насоса) и сигнал измерения электрического тока питания электрического двигателя и генерировать на выходе командный сигнал напряжения для управления электрическим двигателем 2.
Сигнал заданного положения, принятый блоком 10 управления, характеризует искомое положение штока (или поршня), причем это положение определяет, например, пилот летательного аппарата.
Сигнал измерения положения, принятый блоком 10 управления, характеризует измеренное положение штока (или поршня). Сигнал измерения положения генерирует датчик положения, встроенный в гидроцилиндр 4, например, такой как датчик на эффекте Холла.
Сигнал измерения скорости вращения электрического двигателя, принятый блоком 10 управления, характеризует скорость вращения ротора электрического двигателя (или вала 5 насоса). Сигнал измерения скорости вращения генерирует датчик скорости, связанный с валом 5 насоса или с ротором электрического двигателя 2, например, такой как инкрементный кодер.
Сигнал измерения электрического тока, принятый блоком 10 управления, характеризует силу электрического тока, питающего статор электрического двигателя. В случае синхронного двигателя с постоянными магнитами ток является трехфазным, и сила электрического тока является эффективным значением одной из фаз тока.
Блок 10 управления содержит первый модуль 11 управления, второй модуль 12 управления, третий модуль 13 управления и четвертый модуль 20 управления. Модули 11-13 и 20 могут быть физическими модулями, связанными друг с другом через соответствующие средства связи. В альтернативном варианте модули 11-13 и 20 могут быть блоками команд компьютерных программ, выполненными с возможностью взаимодействовать друг с другом, когда их исполняет процессор. Эти модули могут в этом случае образовать вместе компьютерную программу, исполняемую по меньшей мере одним процессором.
Первый модуль 11 управления выполнен с возможностью генерировать сигнал заданной скорости в зависимости от сигнала заданного положения и от сигнала измерения положения.
Второй модуль 12 управления выполнен с возможностью генерировать сигнал заданного тока в зависимости от сигнала заданной скорости и от сигнала измерения скорости.
Третий модуль 13 управления выполнен с возможностью генерировать сигнал напряжения для управления электрическим двигателем в зависимости от сигнала заданного тока и от сигнала измерения тока.
Четвертый модуль 20 управления выполнен с возможностью генерировать сигнал коррекции, чтобы корректировать сигнал заданного тока, в зависимости от сигнала измерения положения, от сигнала измерения скорости и от сигнала измерения тока.
Сигнал коррекции применяют к сигналу заданного тока при помощи умножителя.
Применение сигнала коррекции позволяет ограничивать разность давлений текучей среды между камерами 14 и 15 гидроцилиндра 4, когда внешняя сила  , действующая на электрогидростатический привод 1, становится слишком большой.
, действующая на электрогидростатический привод 1, становится слишком большой.
На фиг. 2 показана блок-схема этапов способа 100 управления электрогидростатическим приводом, при этом способ 100 осуществляет блок 10 управления.
На первом этапе 110 модуль 13 управления генерирует командный сигнал для управления электрическим двигателем 2.
На втором этапе 120 модуль 20 управления оценивает внешнюю силу  , действующую на электрогидростатический привод 1, в зависимости от скорости
, действующую на электрогидростатический привод 1, в зависимости от скорости  вращения электрического двигателя, от положения х поршня и от тока питания
вращения электрического двигателя, от положения х поршня и от тока питания  электрического двигателя, при этом скорость вращения электрического двигателя, положение поршня и ток питания двигателя измеряют датчики.
электрического двигателя, при этом скорость вращения электрического двигателя, положение поршня и ток питания двигателя измеряют датчики.
На третьем этапе 130 в зависимости от значения силы  , оцененной на втором этапе, модуль 20 управления определяет переменную коррекции командного сигнала. В частности, вычисленная переменная коррекции может быть такой, что, если внешняя сила меньше порогового значения, переменная коррекции равна 1, если внешняя сила имеет значение между первым пороговым значением и вторым пороговым значением, переменная коррекции линейно уменьшается между 0 и 1, и, если внешняя сила превышает второе пороговое значение, переменная коррекции равна 0.
, оцененной на втором этапе, модуль 20 управления определяет переменную коррекции командного сигнала. В частности, вычисленная переменная коррекции может быть такой, что, если внешняя сила меньше порогового значения, переменная коррекции равна 1, если внешняя сила имеет значение между первым пороговым значением и вторым пороговым значением, переменная коррекции линейно уменьшается между 0 и 1, и, если внешняя сила превышает второе пороговое значение, переменная коррекции равна 0.
На четвертом этапе 140 модуль 20 управления применяет переменную коррекции к командному сигналу таким образом, чтобы ограничить разность давлений текучей среды между камерами 14 и 15 гидроцилиндра и, следовательно, силу реакции, генерируемую электрогидростатическим приводом.
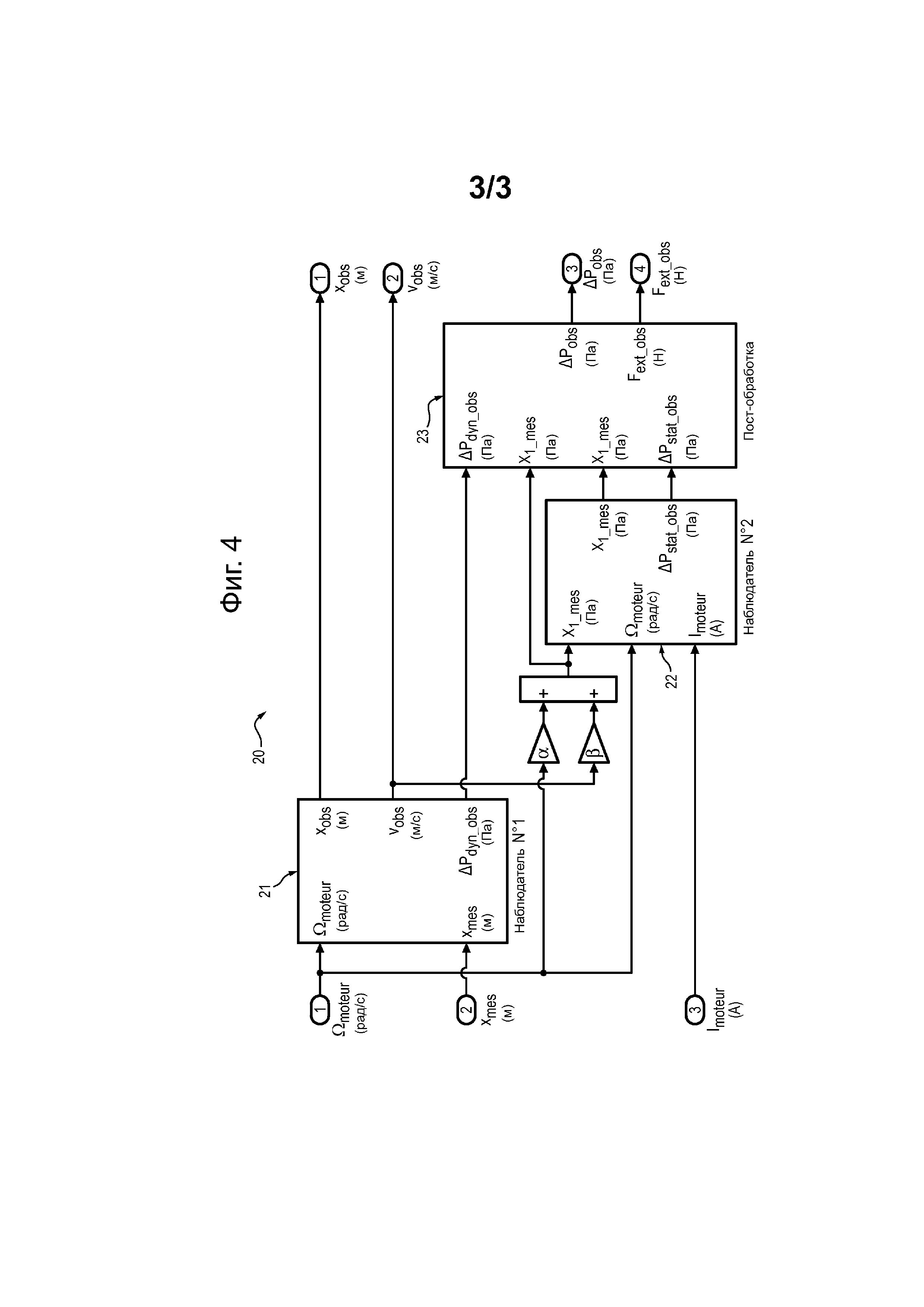
На фиг. 3 и 4 схематично представлен способ оценки внешней силы  , осуществляемый модулем 20 управления на втором этапе 120.
, осуществляемый модулем 20 управления на втором этапе 120.
В рамках способа оценки внешней силы  используют первый наблюдатель 21 состояния, второй наблюдатель 22 состояния и модуль 23 пост-обработки.
используют первый наблюдатель 21 состояния, второй наблюдатель 22 состояния и модуль 23 пост-обработки.
Наблюдатели 21 и 22 состояния и модуль 23 пост-обработки могут быть физическими модулями, связанными друг с другом через соответствующие средства связи, или блоками команд компьютерных программ, выполненными с возможностью взаимодействовать друг с другом, когда их исполняет процессор. Наблюдатели 21, 22 состояния и модуль 23 пост-обработки могут в этом случае образовать вместе компьютерную программу, исполняемую по меньшей мере одним процессором.
Для получения информации о наблюдателях состояния можно обратиться к публикации «Прикладная автоматика», Филипп де Лармина, 2-е издание, 2009, Гермес Сьянс Пюбликасьон, глава 8.3 - Наблюдатели LTI, стр. 209 и далее.
Можно напомнить, что наблюдатель состояния позволяет реконструировать не измеряемое состояние системы при помощи математической модели системы и измерений других величин. Например, предположим, что система имеет вход  , выход (измеряемый)
, выход (измеряемый)  и состояние (не измеряемое)
и состояние (не измеряемое)  , которое необходимо оценить.
, которое необходимо оценить.
Наблюдатель динамического состояния имеет вид:
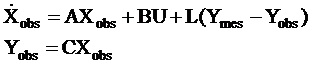
где  является измерением выхода
является измерением выхода  ,
,  является оценкой выхода
является оценкой выхода  , произведенной при помощи наблюдателя,
, произведенной при помощи наблюдателя,  ,
,  ,
,  являются матрицами параметров математической модели системы, и
являются матрицами параметров математической модели системы, и  является матрицей коэффициента усиления, выбираемой таким образом, чтобы погрешность состояния
является матрицей коэффициента усиления, выбираемой таким образом, чтобы погрешность состояния  стремилась к нулю 0.
стремилась к нулю 0.
Наблюдатель может быть записан следующим образом:

Наблюдатели 21 и 22 состояния могут быть наблюдателями детерминистского или схоластического типа. Примером наблюдателя состояния детерминистского типа является наблюдатель Люенбергера. Примером наблюдателя состояния схоластического типа является наблюдатель Калмана.
На первом этапе 121 модуль 20 управления оценивает при помощи первого наблюдателя 21 состояния динамическую составляющую  разности давлений между камерами 14 и 15 гидроцилиндра 4 и скорость
разности давлений между камерами 14 и 15 гидроцилиндра 4 и скорость  перемещения поршня 7 на основании измеренной скорости вращения
перемещения поршня 7 на основании измеренной скорости вращения  электрического двигателя и измеренного положения
электрического двигателя и измеренного положения  поршня 7.
поршня 7.
Первый наблюдатель 21 использует скорость вращения  электрического двигателя в качестве входа системы и положение
электрического двигателя в качестве входа системы и положение  поршня в качестве выхода.
поршня в качестве выхода.
Динамическую составляющую  разности давлений оценивают при помощи первого наблюдателя на основании первой математической модели.
разности давлений оценивают при помощи первого наблюдателя на основании первой математической модели.
Поскольку на этом этапе оценивают только динамическую составляющую  разности давлений, первая математическая модель основана на предположении, что внешняя сила
разности давлений, первая математическая модель основана на предположении, что внешняя сила  , действующая на привод, является нулевой.
, действующая на привод, является нулевой.
Таким образом, первая детерминистская математическая модель имеет следующий вид:

где  является оценочным положением поршня, является оценочной скоростью поршня,
является оценочным положением поршня, является оценочной скоростью поршня,  является оценочной динамической составляющей разности давления,
является оценочной динамической составляющей разности давления,  является скоростью вращения электрического двигателя,
является скоростью вращения электрического двигателя,  является измеренным положением поршня,
является измеренным положением поршня,  ,
,  ,
,  являются постоянными параметрами модели, и
являются постоянными параметрами модели, и  ,
,  ,
,  являются коэффициентами усиления первого наблюдателя.
являются коэффициентами усиления первого наблюдателя.
Параметры  ,
,  ,
,  можно, например, получить при помощи методов параметрической идентификации на основании реальных испытаний на приводе.
можно, например, получить при помощи методов параметрической идентификации на основании реальных испытаний на приводе.
Коэффициенты усиления  ,
,  ,
,  получают при помощи методов расположения полюсов в случае детерминистской модели или при помощи методов оптимизации функции напряжения в случае схоластической модели.
получают при помощи методов расположения полюсов в случае детерминистской модели или при помощи методов оптимизации функции напряжения в случае схоластической модели.
Первую математическую модель можно увеличить, чтобы учитывать дополнительные переменные, например, такие как утечки насоса.
Этот первый этап 121 позволяет получить оценочное значение  динамической составляющей разности давлений между двумя камерами 14 и 15 гидроцилиндра.
динамической составляющей разности давлений между двумя камерами 14 и 15 гидроцилиндра.
На втором этапе 122 модуль 20 управления оценивает при помощи второго наблюдателя 22 состояния статическую составляющую разности давлений между двумя камерами 14 и 15 на основании скорости перемещения поршня  , ранее оцененной при помощи первого наблюдателя, скорости вращения
, ранее оцененной при помощи первого наблюдателя, скорости вращения  электрического двигателя и тока питания
электрического двигателя и тока питания  электрического двигателя.
электрического двигателя.
Второй наблюдатель 22 использует скорость вращения  электрического двигателя и ток питания
электрического двигателя и ток питания  электрического двигателя в качестве входных переменных и переменную состояния
электрического двигателя в качестве входных переменных и переменную состояния  , комбинирующую скорость
, комбинирующую скорость  перемещения поршня и скорость вращения
перемещения поршня и скорость вращения  двигателя, в качестве измеренной переменной.
двигателя, в качестве измеренной переменной.
Статическую составляющую  разности давлений текучей среды оценивают при помощи второго наблюдателя 22 на основании второй математической модели привода.
разности давлений текучей среды оценивают при помощи второго наблюдателя 22 на основании второй математической модели привода.
Поскольку на этом этапе оценивают только статическую составляющую  разности давлений, вторая математическая модель основана на предположении, что внешняя сила
разности давлений, вторая математическая модель основана на предположении, что внешняя сила  , действующая на электрогидростатический привод, меняется медленно, и, следовательно, ее можно считать постоянной силой. В состоянии квази-статики (при слабых ускорения поршня) разность давлений между камерами 14 и 15 гидроцилиндра пропорциональная внешней силе
, действующая на электрогидростатический привод, меняется медленно, и, следовательно, ее можно считать постоянной силой. В состоянии квази-статики (при слабых ускорения поршня) разность давлений между камерами 14 и 15 гидроцилиндра пропорциональная внешней силе  .
.
Таким образом, детерминистская математическая модель имеет следующий вид:
 ,
,
при  ,
,
где  является оценочной переменной состояния
является оценочной переменной состояния  ,
,  является оценочной статической составляющей разности давлений,
является оценочной статической составляющей разности давлений,  является измеренной переменной состояния
является измеренной переменной состояния  ,
,  является скоростью вращения электрического двигателя,
является скоростью вращения электрического двигателя,  является током питания электрического двигателя,
является током питания электрического двигателя,  ,
,  ,
,  и
и  являются постоянными параметрами модели, и
являются постоянными параметрами модели, и  и
и  являются коэффициентами усиления второго наблюдателя.
являются коэффициентами усиления второго наблюдателя.
Параметры  ,
,  ,
,  и
и  можно, например, получить при помощи методов параметрической идентификации на основании реальных испытаний на приводе.
можно, например, получить при помощи методов параметрической идентификации на основании реальных испытаний на приводе.
Коэффициенты усиления  и
и  получены при помощи методов расположения полюсов в случае детерминистской модели или при помощи методов оптимизации функции напряжения в случае схоластической модели.
получены при помощи методов расположения полюсов в случае детерминистской модели или при помощи методов оптимизации функции напряжения в случае схоластической модели.
Вторую математическую модель можно тоже увеличить, чтобы учитывать дополнительные переменные, например, такие как утечки насоса.
На третьем этапе 123 модуль 20 управления определяет через модуль 23 пост-обработки оценочную разность давлений  между камерами привода. Оценочную разность давлений
между камерами привода. Оценочную разность давлений  определяют как сумму динамической составляющей, оцененной при помощи первого наблюдателя, и статической составляющей, оцененной при помощи второго наблюдателя:
определяют как сумму динамической составляющей, оцененной при помощи первого наблюдателя, и статической составляющей, оцененной при помощи второго наблюдателя:

Модуль 20 управления определяет также внешнюю силу  , действующую на привод, на основании оценочной разности давлений.
, действующую на привод, на основании оценочной разности давлений.
В случае симметричного гидроцилиндра внешнюю силу определяют следующим образом:

где  является оценочной внешней силой,
является оценочной внешней силой,  является оценочной разностью давлений, и
является оценочной разностью давлений, и  является площадью поперечного сечения гидроцилиндра.
является площадью поперечного сечения гидроцилиндра.
В случае несимметричного гидроцилиндра внешнюю силу определяют следующим образом:

при 
где  является сечением гидроцилиндра со стороны камеры 14, и
является сечением гидроцилиндра со стороны камеры 14, и  является сечением гидроцилиндра со стороны камеры 15.
является сечением гидроцилиндра со стороны камеры 15.
Иначе говоря, внешнюю силу  оценивают как линейную комбинацию динамической составляющей разности давлений, оцененной при помощи первого наблюдателя 21, и статической составляющей разности давлений, оцененной при помощи второго наблюдателя 22.
оценивают как линейную комбинацию динамической составляющей разности давлений, оцененной при помощи первого наблюдателя 21, и статической составляющей разности давлений, оцененной при помощи второго наблюдателя 22.
Таким образом, внешнюю силу, действующую на привод, реконструируют, просто комбинируя две составляющие, полученные при помощи двух наблюдателей состояния 21 и 22.



























Способ навигации беспилотного аппарата в присутствии постороннего летательного аппарата и беспилотный аппарат для осуществления способа
Способ обеспечения автоматической посадки летательного аппарата
Двухканальная архитектура с избыточными линиями связи ccdl
Способ контроля электромеханической приводной системы
Вооруженная оптоэлектронная турель
Устройство управления полетом летательного аппарата
Система для дистанционно управляемых систем
Способ проверки неразрывности передачи данных между главным входным блоком и главным выходным блоком
Устройство ручки управления полетом летательного аппарата с возвратным усилием, содержащее резервный канал
Двухканальная архитектура

