Результат интеллектуальной деятельности: СПОСОБ ПОЛУЧЕНИЯ ТРЁХМЕРНОГО ИЗОБРАЖЕНИЯ В РАДАРЕ ПЕРЕДНЕБОКОВОГО ОБЗОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ
Вид РИД
Изобретение
Изобретение относится к системам радиовидения и может быть использовано для получения трехмерного радиолокационного изображения объектов сцены при переднебоковом обзоре с высокой разрешающей способностью, как по дальности, так и по углу азимута, независимо от метеоусловий и уровня освещенности. Получение высокого разрешения по дальности обеспечивается использованием широкополосных сигналов с линейно-частотной модуляцией. Получение высокого разрешения по азимуту реализуется с помощью синтезирования апертуры антенны во время движения радара при наблюдении за объектами сцены в течение продолжительного времени с разных ракурсов. Оценка высоты объектов осуществляется с помощью частотного сканирования лучом в вертикальной плоскости, что в итоге позволяет построить трехмерное радиолокационное изображение. В качестве платформы радара используется наземный транспорт либо низколетящие беспилотные аппараты. Объектами сцены являются окружающие транспорт объекты (тротуары, кусты, деревья, люди, здания, другие транспортные средства и т.д.).
В [1] известен способ построения радиолокационного изображения в устройстве автомобильного радара непрерывного излучения с синтезированием апертуры. Оно ориентировано на обнаружение препятствий вокруг автомобиля и может быть использовано для парковки. Однако при этом изображение строится на плоскости в координатах дальность-азимут, без возможности извлечения информации о высоте объекта, а значит восстановление трехмерной картины сцены не предусмотрено.
В статье [2] и патентах [3, 4] представлен способ частотного сканирования лучом диаграммы направленности антенны в миллиметровом радаре с непрерывным частотно-модулированным сигналом. Но при этом не затрагивается вопрос синтезирования апертуры и построения итогового трехмерного изображения высокого разрешения.
В [5] известен способ формирования трехмерного изображения в радаре с синтезированной апертурой. Он основан на том, что при синтезе используется несколько приемных антенных элементов, разнесенных по высоте. Недостаток этого метода в том, что при этом усложняется структура системы, увеличивается ее стоимость и габариты.
Наиболее близким к заявляемому изобретению является способ построения радиолокационного изображения, приведенный в описании изобретения под названием «Устройство радиолокационной станции с непрерывным линейно-частотно-модулированным сигналом и синтезом апертуры» [6] и заключающийся в использовании радиолокационных станций (РЛС) с непрерывным линейно-частотно-модулированным сигналом для повышения скрытности работы РЛС с одновременным упрощением процедуры компенсации миграции сигнала цели по дальности и фазе в алгоритме синтезирования апертуры антенны. Указанный результат (построение радиолокационного изображения) достигается за счет приема отраженного сигнала с получением сигнала биений отраженного сигнала с зондирующим, демодуляции сигнала биений с помощью эталонного опорного сигнала, компенсирующего миграцию сигналов сцены по дальности и фазе на интервале синтеза апертуры, после которой выполняются сжатие сигналов по дальности и селекция сигналов элементов сцены в равномерной сетке доплеровских частот. Недостатком прототипа является отсутствие варианта построения алгоритма обработки сигнала, предназначенного для формирования трехмерного радиолокационного изображения объектов сцены.
Задача, на решение которой направлено предлагаемое техническое решение, - увеличение информативности радиолокационного изображения путем построения высотного профиля окружающих объектов (осуществление трехмерного картографирования) с сохранением относительной простоты устройства радара, малых габаритов и дешевизны для возможности массового использования в автомобильных системах и на базе беспилотных летательных средств, где габариты и стоимость имеют важное значение.
Решение поставленной задачи достигается тем, что в способе построения радиолокационного изображения в радиолокационных системах с синтезированной апертурой антенны переднебокового обзора, заключающимся в том, что излучается широкополосный непрерывный сигнал с линейно частотной модуляцией, принимается отраженный сигнал от цели, он перемножается с опорным сигналом на смесителе, проходит полосовой фильтр для выделения сигнала биений, оцифровывается в аналого-цифровом преобразователе и поступает в блок цифровой обработки синтезирования апертуры антенны, дополнительно осуществляется разделение принятого сигнала на различные каналы по углу места согласно закону частотного сканирования лучом антенной системы в вертикальной плоскости. В каждом канале но углу места выполняется раздельная обработка сигнала: осуществляется наложение на сигнал оконной функции по дальности и азимуту, реализуется двумерное преобразование Фурье, осуществляется цифровое диаграммообразование по азимуту для переднебокового обзора. Затем полученные сигналы в каждом канале по углу места умножаются на экспоненциальный множитель для устранения остаточной видеофазы, после этого выполняется устранение миграции по дальности и умножение на двумерную опорную функцию по азимуту для устранения ЛЧМ модуляции, обусловленной движением радара. Затем реализуется обратное преобразование Фурье по азимуту для получения сфокусированного изображения в каждом канале по углу места. На завершающем этапе выполняется объединение каналов по углу места путем соответствующего проецирования полученных точек в единую декартовую систему координат. Для этого, зная наклонную дальность и положение цели по азимуту (координата Y), рассчитывается угол азимута на цель, затем путем умножения наклонной дальности на косинус угла места и косинус угла азимута оценивается дальность до цели вдоль поверхности Земли (координата X), умножением наклонной дальности на синус угла места оценивается высота объекта (координата Z). В результате формируется трехмерное изображение окружающего пространства в координатах XYZ для наземных или низколетящих радиолокационных платформ, в котором интенсивность цвета изображения пропорциональна отражательной способности целей.
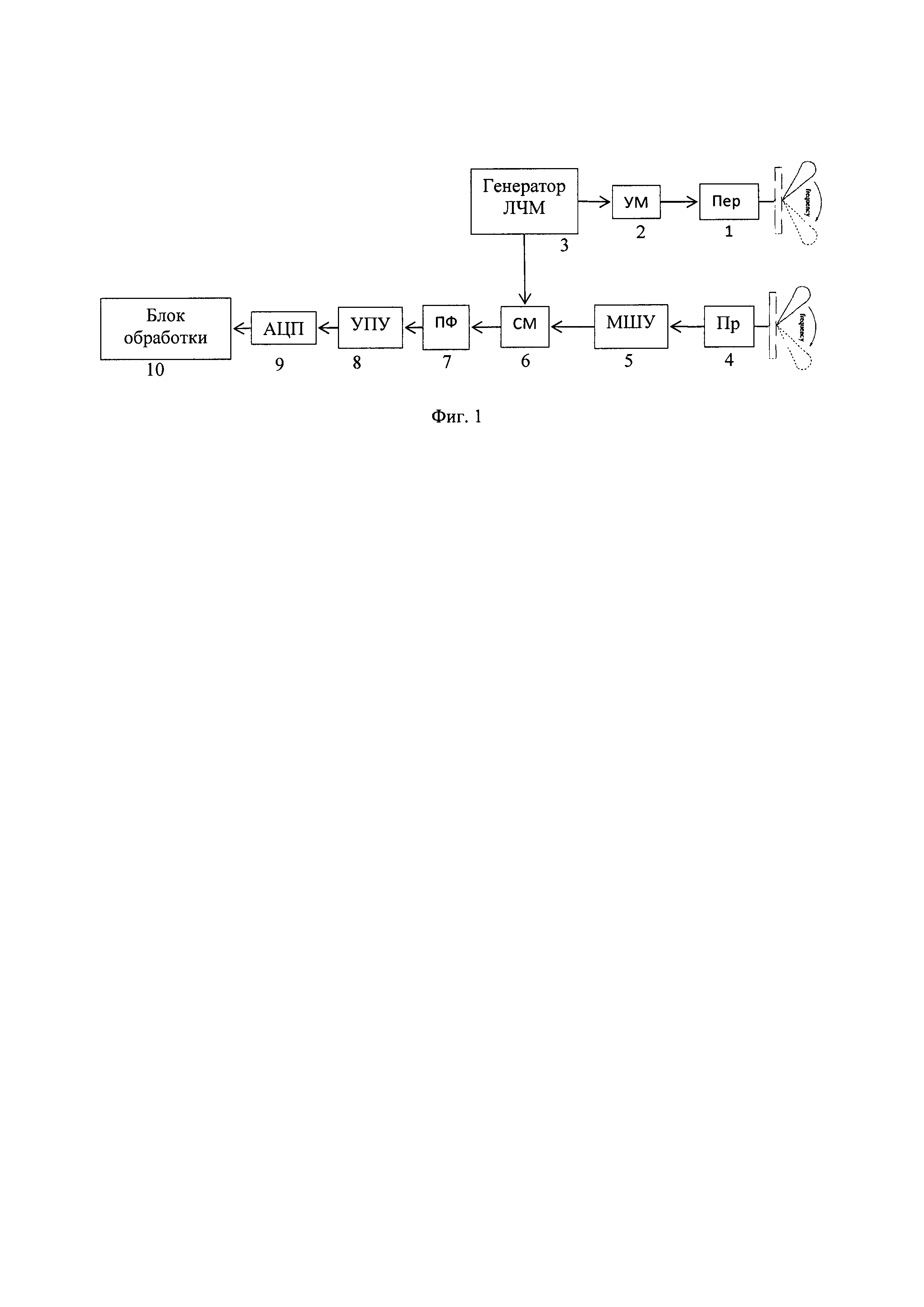
Структурная схема радара с частотным сканированием луча приведена на фиг. 1, на которой приняты следующие обозначения: 1 - передающая антенна (Пер); 2 - усилитель мощности (УМ); 3 - генератор сигнала с линейно-частотной модуляцией (Генератор ЛЧМ); 4 - приемная антенна (ПР); 5 - малошумящий усилитель мощности (МШУ); 6 - смеситель (СМ); 7 - полосовой фильтр (ПФ); 8 - усилитель с переменным усилением (УПУ); 9 - аналого-цифровой преобразователь (АЦП); 10 - Блок цифровой обработки сигнала (Блок обработки).
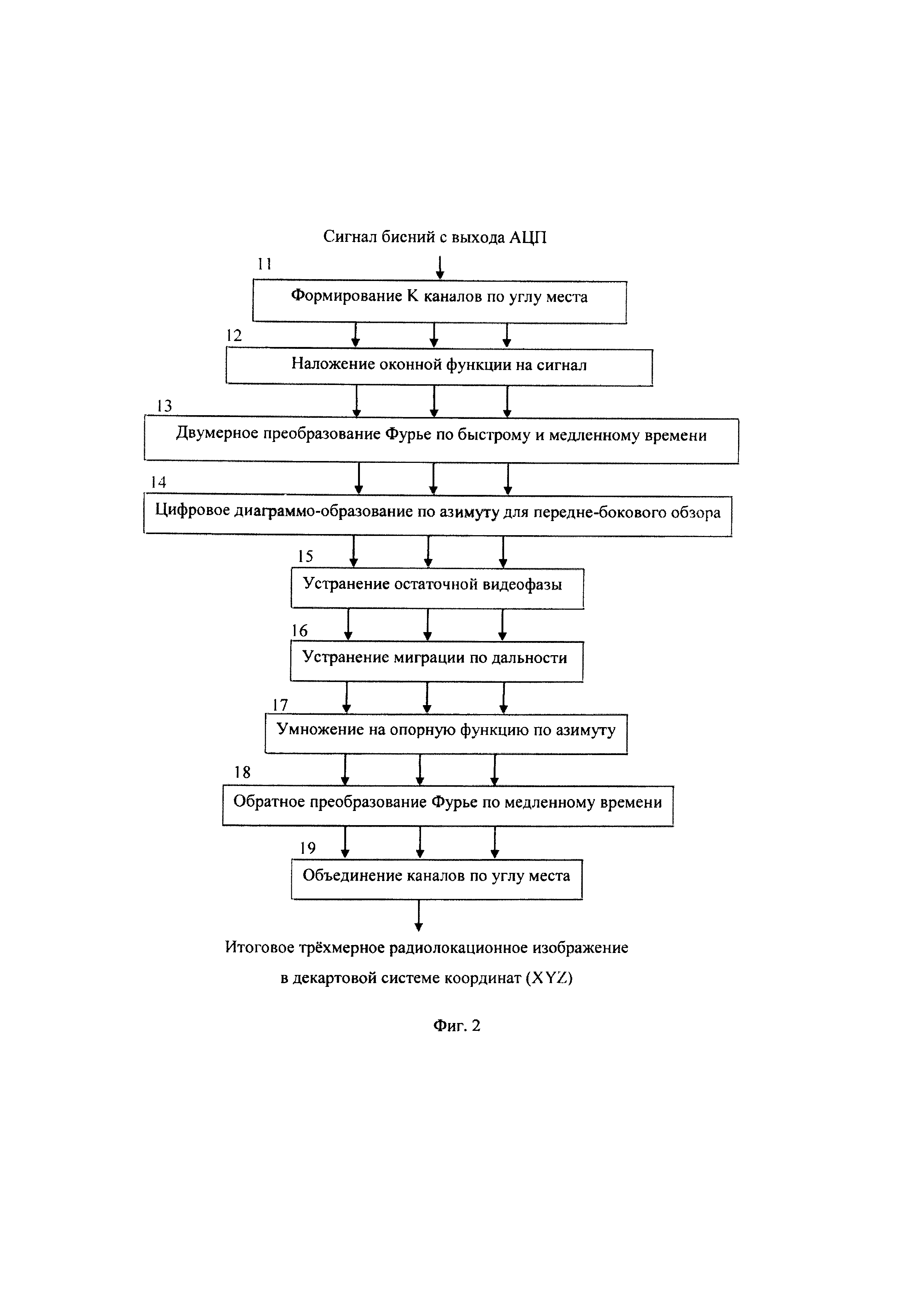
Блок схема алгоритма обработки сигнала представлена на фиг. 2, на которой обозначено: 11 - формирование K каналов принятого сигнала по углу места; 12 - наложение на сигнал оконной функции по дальности и азимуту; 13 - двумерное преобразование Фурье по быстрому (вдоль дальности) и медленному (вдоль азимута) времени; 14 - цифровое диаграммообразование в азимутальной плоскости для передне-бокового обзора; 15 - устранение остаточной видеофазы; 16 - устранение миграции по дальности; 17 - умножение сигнала на опорную функцию по азимуту; 18 - обратное преобразование Фурье по медленному времени; 19 - объединение каналов по углу места для формирования итогового трехмерного радиолокационного изображения.
Подробное описание способа.
В основе способа лежит идея извлечения информации о высоте объектов в радаре непрерывного излучения с синтезированной апертурой за счет частотного сканирования лучом (ЧКЛ) диаграммы направленности. Принцип ЧКЛ основан на том, что с изменением частоты опорного генератора эквивалентно изменяется электрическое расстояние между излучателями. Это приводит к изменению фазовых сдвигов между ними и, как следствие, к формированию определенного наклона фазового фронта антенной решетки. В результате главный лепесток ДН антенны отклоняется на заданный угол.
Функциональная схема радара представлена на фиг. 1. Генератор сигнала с линейно-частотной модуляцией формирует непрерывный широкополосный сигнал малой длительности с периодическим линейным изменением частоты (односторонняя пила). Пройдя усилитель мощности (УМ) он излучается передающей антенной (Пер). Передающая антенна представляет собой антенную решетку, которая формирует узкий луч в вертикальной плоскости и широкий в горизонтальной. При этом за счет изменения частоты сигнала ЛЧМ луч передающей антенны меняет свою ориентацию в вертикальной плоскости, осуществляя сканирование в заданном секторе углов по вертикали. Излученный сигнал с периодом модуляции T и полосой Δƒ записывается в виде функции от времени
где  k=Δƒ/T - крутизна ЛЧМ модуляции, ƒ0 - несущая частота.
k=Δƒ/T - крутизна ЛЧМ модуляции, ƒ0 - несущая частота.
Сигнал, отраженный от цели на дальности R0, поступает на вход приемной антенны (Пр) и описывается следующим выражением:

где σ характеризует отражательные характеристики цели,  - временная задержка сигнала.
- временная задержка сигнала.
Принятый сигнал проходит малошумящий усилитель мощности (МШУ) и поступает на смеситель (СМ). В смесителе осуществляется перемножение излученного и принятого сигналов, на выходе получается сигнал разностной и суммарных частот. С выхода смесителя сигнал поступает на полосовой фильтр (ПФ), который выполняет фильтрацию сигнала разностной частоты. Получаем сигнал биений:

где А - эквивалентный амплитудный множитель.
Этот сигнал усиливается в усилителе с переменным усилением (УПУ), оцифровывается аналого-цифровым преобразователем (АЦП) с частотой ƒs и поступает в блок обработки. Отсчеты оцифрованного сигнала записываются в виде

где Δt=1/ƒs - шаг дискретизации по времени.
Приемная антенная решетка в вертикальной плоскости формирует узкий луч, положение которого меняется по углу места с изменением частоты сигнала. В горизонтальной плоскости она имеет М каналов. Таким образом, в блок обработки поступает М сигналов биений, которые можно представить матрицей данных размером [М, N], где N - количество точек оцифрованного сигнала биений за один период модуляции сигнала. Следует отметить, что значение М обычно мало, поскольку по азимуту необходимо обеспечить широкую ДН для возможности синтезирования апертуры большого размера. В блоке обработки каждый период принятого сигнала биений делится на K временных отрезка. При этом получается, что каждый отрезок из P=N/K точек соответствует определенному положению луча в вертикальной плоскости (по углу места). Выбор значения K зависит от компромисса между относительной постоянности положения луча по углу места за длительность одного парциального отрезка времени, равного τ=N/(K⋅ƒs), и желаемым сохранением приемлемого разрешения по дальности, которое равно δr≈K⋅c/(2Δƒ). В результате получаем трехмерную матрицу значений оцифрованного сигнала размерностью [M,P,K]. На эту сигнальную матрицу накладывается оконная функция для снижения уровня боковых лепестков отклика сигнала. Далее в каждом из K каналов по углу места выполняется преобразование Фурье по времени (вдоль М строк сигнальной матрицы) и по азимуту (вдоль Р столбцов). В результате для каждого из K срезов по высоте (по углу места) получается радиолокационное изображение с хорошим разрешением по дальности и относительно плохим по азимуту.
При получении пачки из S таких радиолокационных сигналов (изображений), с целью улучшения разрешения по азимуту, осуществляется синтез апертуры антенны для каждого канала по углу места. В качестве алгоритма синтезирования используется Range Doppler Algorithm (RDA) с адаптацией к работе в условиях больших углов скоса. Поскольку при этом обрабатывается сразу пачка импульсов, то сигнал биений описывается двумерной функцией (1.1). Для упрощения математических выкладок огибающая сигнала по азимуту полагается прямоугольной формы с амплитудным уровнем равным единице.

где t - время по дальности (быстрое время), η - время по азимуту (медленное время), ηc - время наступления нулевого доплера; Ta - время синтезирования.
Задержка сигнала зависит от медленного времени и рассчитывается по формуле:
где R(η) - мгновенная наклонная дальность; R0 - кратчайшая дальность между радаром и целью ν - скорость радара.
Геометрия системы представлена на фиг. 3.
Последняя экспонента в (1.1) известна как остаточная видеофаза (RVP). Ее необходимо устранить путем умножения на соответствующий экспоненциальный множитель. После устранения остаточной видеофазы получаем выражение

В алгоритме RDA на первом шаге выполняется преобразование Фурье вдоль быстрого времени, получается сигнал вида

где 
Затем выполняется преобразование Фурье вдоль медленного времени и получается двумерный сигнал в частотной области

Из (1.2) видно, что изображение по дальности сжато, при этом пик функции Котельникова меняет свое положение от азимута (от азимутальной частоты ƒn). Зависимость сдвига по дальности от азимута называется миграцией по дальности (RCM - Range cell migration) и он равен:

где 
При работе в передне-боковом режиме, для которого характерны большие углы скоса (отсчитываемые от бокового направления), пренебрегать миграцией по дальности нельзя. Ее необходимо устранить, используя соотношение (1.3).
Для сжатия сигнала по азимуту, его нужно пропустить через согласованный фильтр, который при работе в условиях больших углов скоса имеет следующую частотную характеристику:
Опорная функция учитывает нелинейное изменение дальности до цели путем разложения в ряд Тейлора и сохранения первых трех слагаемых [7].
В результате получаем сигнал вида:

Обратное преобразование Фурье вдоль медленного времени дает итоговое изображение i-й точечной цели:

Выражение (1.4) характеризует двумерный отклик, который представляет собой произведение двух функций Котельникова. Положение максимума двумерной функции вдоль оси X пропорционально наклонной дальности до цели, а вдоль оси Y - положению, при котором фиксировался нулевой доплер (радар был напротив цели). Последняя экспонента имеет постоянную фазу, но она не влияет на абсолютное значение отклика.
Получая набор двумерных изображений «дальность - азимут» для каждого положения ДН по углу места, формируется итоговое трехмерное изображение «дальность-азимут-высота». При этом проекция наклонной дальности осуществляется с учетом знаний о центральном угловом положении каждого луча, а высота отраженных объектов приравнивается высоте центра луча для каждой дальности:

где R0 - оценка кратчайшей наклонной дальности до цели; Y - оценка положения цели по азимуту, полученная по сжатому после синтеза апертуры изображению; γ - центр оси ДН по углу места при текущей ориентации луча в вертикальной плоскости; Z - высота объекта.
Геометрия расположения цели показана на фиг. 4.
Таким образом, имея после синтеза апертуры оценки наклонной дальности R0 до цели и ее положения по азимуту Y, восстанавливается ее координата по оси X и высота Z. В результате от каждого отражателя получаем точку в трехмерном координатном пространстве XYZ, амплитуда которой пропорциональна отражательной характеристике объекта.
Предлагаемый способ увеличивает информативность радиолокационного изображения, по сравнению с системой, описанной в способе - прототипе, поскольку подразумевает применение антенн с частотным сканированием луча с последующей обработкой принятых сигналов, позволяющее извлечь информацию о высотном профиле окружающих объектов, а значит построить трехмерное изображение. Повышение информативности достигается за счет объединения парциальных сигналов, полученных при разных положениях ДН антенны по мере частотного сканирования луча и добавления к плоскому изображению азимут-дальность дополнительной оси по высоте по сравнению со способом-прототипом, который обеспечивает построение только в плоскости азимут-дальность.
ЛИТЕРАТУРА
1. Патент ЕС №3264131 А1, МПК G01S 13/34. A vehicle radar for environmental detection.
2. Шишанов С.В., Мякиньков А.В. Возможности применения метода частотного качания луча диаграммы направленности антенны в автомобильном радаре // Информационные системы и технологии: доклады международной научно-технической конференции, 2014 г. - С. 42-43.
3. Патент США №8362946, МПК G01S 13/89. Millimeter wave surface imaging radar system.
4. Патент США №7019682, МПК G01S 13/89. Imaging millimeter wave radar system.
5. Патент США №6741202, МПК G01S 13/90. Techniques for 3-dimensional synthetic aperture radar.
6. Патент РФ №266450, МПК G01S 13/90. Устройство радиолокационной станции с непрерывным линейно-частотно-модулированным сигналом и синтезом апертуры.
7. Авиационные системы радиовидения. Монография. / Под ред. Г.С. Кондратенкова. - М.: «Радиотехника», 2015.
Способ построения радиолокационного изображения в радиолокационных системах с синтезированной апертурой антенны переднебокового обзора, заключающийся в том, что излучается широкополосный непрерывный сигнал с линейно-частотной модуляцией, принимается отраженный сигнал от цели, он перемножается с опорным сигналом на смесителе, проходит полосовой фильтр для выделения сигнала биений, оцифровывается в аналого-цифровом преобразователе и поступает в блок цифровой обработки синтезирования апертуры антенны, отличающийся разделением принятого сигнала на различные каналы по углу места согласно закону частотного сканирования лучом антенной системы в вертикальной плоскости, в каждом канале по углу места осуществляется наложение на сигнал оконной функции по дальности и азимуту, выполняется двумерное преобразование Фурье, осуществляется цифровое диаграммообразование по азимуту для переднебокового обзора, затем полученные сигналы в каждом канале по углу места умножаются на экспоненциальный множитель для устранения остаточной видеофазы, после этого выполняется устранение миграции по дальности и умножение на двумерную опорную функцию по азимуту для устранения ЛЧМ модуляции, обусловленной движением радара, затем реализуется обратное преобразование Фурье по азимуту для получения сфокусированного изображения в каждом канале по углу места, на завершающем этапе выполняется объединение каналов по углу места путем соответствующего проецирования полученных точек в единую декартовую систему координат, для этого, зная наклонную дальность и положение цели по азимуту (координата Y), рассчитывается угол азимута на цель, затем путем умножения наклонной дальности на косинус угла места и косинус угла азимута оценивается дальность до цели вдоль поверхности Земли (координата X), умножением наклонной дальности на синус угла места оценивается высота объекта (координата Z), в результате формируется трехмерное изображение окружающего пространства в координатах XYZ для наземных или низколетящих радиолокационных платформ, в котором интенсивность цвета изображения пропорциональна отражательной способности целей.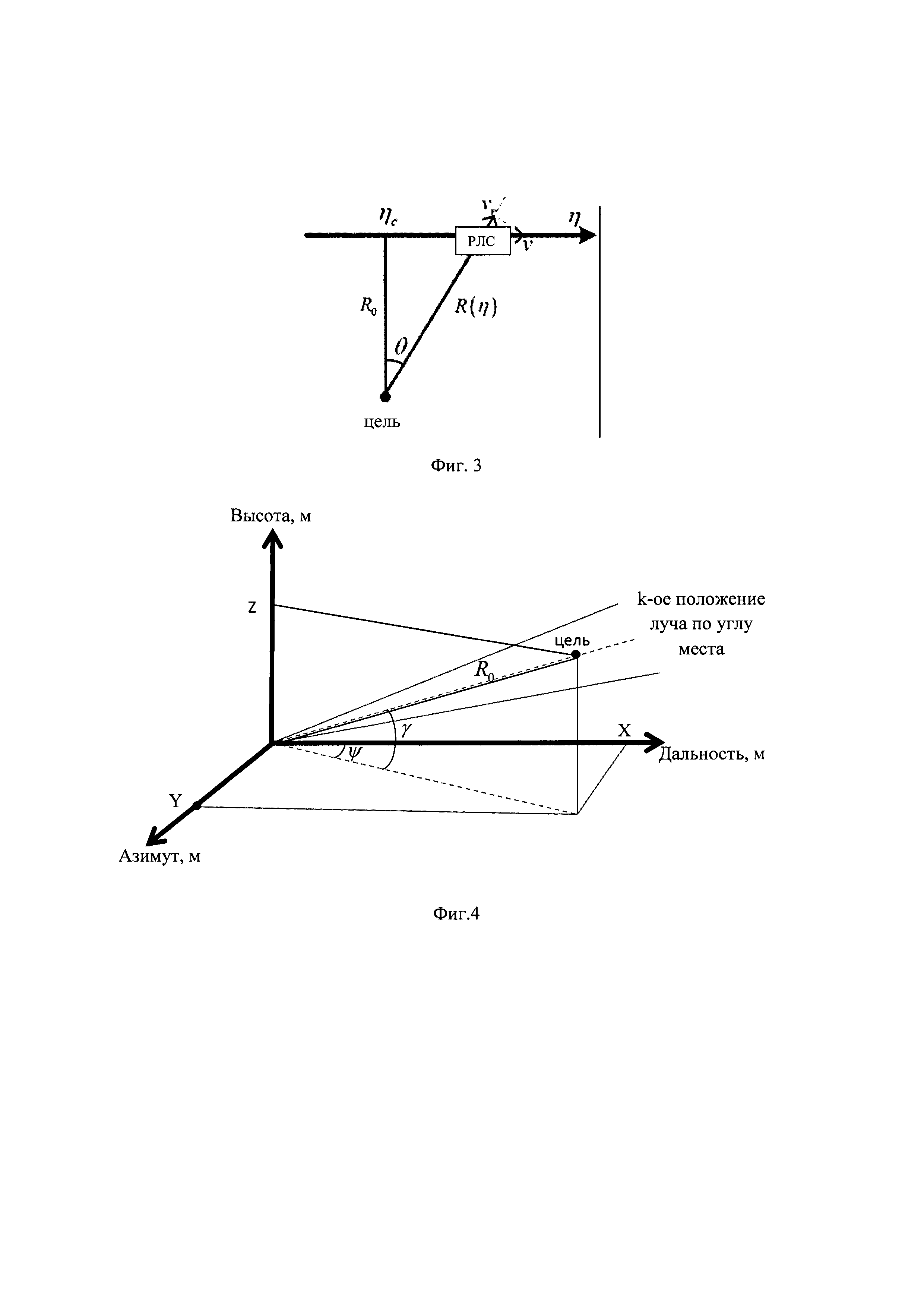
Способ получения трёхмерного изображения в радаре бокового обзора с синтезированием апертуры антенны
Многоканальная антенная решетка
Способ получения перфторэтилизопропилкетона
Способ определения нелинейных искажений преобразования полосовых сигналов объектом
Способ определения модуля упругости однородного покрытия
Способ пассивного обнаружения воздушных объектов
Способ автоматического регулирования уровня выходного сигнала и система для его осуществления
Способ получения трёхмерного изображения в радаре бокового обзора с синтезированием апертуры антенны
Способ динамического изменения ширины полосы захвата в радаре непрерывного излучения с синтезированием апертуры антенны
Антенная решетка
Многоканальная антенная решетка

