Результат интеллектуальной деятельности: СИСТЕМЫ ДЛЯ СТАБИЛИЗАЦИИ И СПОСОБ ДЛЯ СТАБИЛИЗАЦИИ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе для стабилизации транспортного средства согласно ограничительной части пункта 1 формулы изобретения. Изобретение также относится к способу для стабилизации транспортного средства согласно ограничительной части пункта 14 формулы изобретения и транспортного средства согласно пункту 11 формулы изобретения.
УРОВЕНЬ ТЕХНИКИ
Сегодня, транспортные средства, в частности, наземные транспортные средства, часто перемещаются по неровной земле и могут сталкиваться с препятствиями разных типов. Чтобы справляться с такими неровностями и препятствиями, в то же время сохраняя комфорт и без опрокидывания транспортного средства, важно, чтобы обеспечивался достаточный контакт между колесами транспортного средства и землей. Транспортные средства, следовательно, часто спроектированы с колесными тележками, которые побуждают колеса следовать неровностям земли. Колесная тележка является вспомогательным шасси, которое может вращаться относительно главных шасси или рамы транспортного средства. Колесная тележка обычно содержит четыре колеса, которые посредством поддерживающих колеса маятниковых плечей распределяют нагрузку транспортного средства по большему количеству осей и снижают давление на ось, увеличивают несущую способность и улучшают управляемость транспортного средства во время поворотов. Колесная тележка допускает вращение вокруг оси, которая параллельна продольному направлению транспортного средства и, в частности, в случае наземных транспортных средств, в комбинации с возможностью вращаться вокруг оси, которая перпендикулярна продольному направлению транспортного средства. Маятниковые плечи могут, в качестве одной альтернативы, быть по отдельности установлены с возможностью вращения, то есть, присоединены на подшипниках в одном из концов, или они могут относиться к жесткому, центрально установленному типу, состоящему из маятникового плеча, такого как, например, маятниковый вал, спроектированный с возможностью вращения вокруг вращательного подшипника, расположенного в центре маятникового вала.
Наземные транспортные средства, такие как лесотехнические машины, содержат кран со стрелой крана, которая может быть вытянута далеко от транспортного средства, и на свободном конце которой может быть прикреплен инструмент, такой как захватное устройство или жатка. Кран и его нагрузка, которая расположена на самом далеком вытяжении стрелы, составляют существенную часть транспортного средства и воздействуют на положение его центра тяжести, когда стрела крана вытянута из транспортного средства. Это приводит к крутящему моменту, который воздействует на транспортное средство в разных направлениях в зависимости от вращательного положения крана в горизонтальной плоскости и его вытяжения из транспортного средства. Таким образом, если кран направлен вперед, крутящий момент создается в переднем направлении, а если кран повернут в одну сторону, крутящий момент создается в направлении этой стороны. Чтобы предотвратить опрокидывание транспортного средства в результате возникающего крутящего момента, указанный крутящий момент должен быть подвергнут противодействию и уравновешен, что осуществляется посредством стабилизирующего устройства. Такое стабилизирующее устройство является особенно важным, когда транспортное средство является шарнирно-сочлененным транспортным средством. Шарнирно-сочлененное транспортное средство содержит две части шасси, которые объединены друг с другом шарнирным образом, переднюю раму и заднюю раму, которые могут вращаться посредством установки под углом посредством сочлененной суженной части, что делает транспортное средство гибким и простым в маневрировании. Один из недостатков шарнирно-сочлененных транспортных средств, тем не менее, состоит в том, что транспортное средство является менее стабильным, когда оно движется по кривой, так как одновременно смещается центр тяжести транспортного средства.
Один из недостатков стабилизирующих устройств уровня техники состоит в том, что они спроектированы, главным образом, для использования, когда транспортное средство неподвижно. Дополнительный недостаток стабилизирующих устройств уровня техники состоит в том, что они основаны на статических расчетах, основанных на группах параметров, которые были определены заранее, например, на основании вращательного положения крана в горизонтальной плоскости. Так как смещение центра тяжести транспортного средства подвергается воздействию сил и крутящих моментов, которые являются не только статическими, но и динамическими, противодействующие силы, которые рассчитаны, чтобы уравновешивать транспортное средство, не всегда будут соответствовать реальному или правильному крутящему моменту, который возникает на транспортном средстве из-за смещения центра тяжести, который имеет место. Последнее является особенно полезным, когда транспортное средство находится в движении и подвергается воздействию динамических и более или менее непредсказуемых сил и крутящих моментов, которые не обязательно зависят от вращательного положения крана.
Документ SE 532683 описывает систему для стабилизации транспортного средства, содержащую приводы, которые формируют опорную силу на маятниковом валу, чтобы противодействовать вращению и неустойчивости транспортного средства, которые возникают во время вращения крана транспортного средства. Опорная сила, которая требуется, чтобы противодействовать вращению, определяется на основании расчетов, основанных на вращательном положении крана в горизонтальной плоскости. Документ WO2013178886 описывает систему для стабилизации лесотехнической машины, в которой определяется крутящий момент, который действует на часть шасси, после чего определяются величина и направление противодействующего крутящего момента.
Несмотря на решения уровня техники в данной технической области, требуется получить систему для стабилизации транспортных средств, которая является эффективной и безопасной, которая может применяться во время движения транспортного средства, и которая минимизирует риск опрокидывания транспортного средства.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Одна из целей настоящего изобретения состоит в том, чтобы предложить систему для стабилизации транспортного средства, которая является эффективной и безопасной, и которая минимизирует риск опрокидывания транспортного средства.
Еще одна цель изобретения состоит в том, чтобы предложить систему для стабилизации транспортного средства, которая может применяться во время движения транспортного средства.
Еще одна цель настоящего изобретения состоит в том, чтобы предложить способ для стабилизации транспортного средства, который является эффективным и безопасным, и который минимизирует риск опрокидывания транспортного средства.
Еще одна цель изобретения состоит в том, чтобы предложить способ для стабилизации транспортного средства, который может применяться во время движения транспортного средства.
Некоторые из этих целей достигаются с помощью системы для стабилизации транспортного средства согласно пункту 1 формулы изобретения. Другие цели достигаются с помощью транспортного средства согласно пункту 11 формулы изобретения. Другие цели достигаются с помощью способа согласно пункту 14 формулы изобретения. Преимущественные варианты осуществления определены в зависимых пунктах формулы изобретения.
Согласно одному из аспектов изобретения, предложена система для стабилизации транспортного средства, содержащая заднюю колесную тележку, расположенную на шасси транспортного средства, при этом задняя колесная тележка содержит маятниковый вал, который может вращаться вокруг оси, которая продолжается параллельно продольному направлению транспортного средства; опрокидывающее устройство, расположенное на шасси, на котором расположен кран, при этом опрокидывающее устройство содержит вращающийся диск, расположенный на вращательных подшипниках, с тем чтобы вращающийся диск, и, таким образом, также и кран могли вращаться вокруг вертикальной оси; и гидравлическое стабилизирующее устройство, содержащее два стабилизирующих привода, расположенных на задней колесной тележке. Опрокидывающее устройство дополнительно содержит два гидравлических опрокидывающих привода, расположенных в соединении с вращающимся диском, с тем чтобы вращающийся диск мог вращаться вокруг горизонтальной оси относительно шасси, при этом стабилизирующие приводы расположены в соединении по текучей среде с опрокидывающими приводами, и, таким образом, расположены для управления на основании давления в опрокидывающих приводах.
Здесь, термин "вертикальная ось" используется, чтобы обозначать ось, которая продолжается по существу перпендикулярно земле, по которой движется транспортное средство. Здесь, термин "горизонтальная ось" используется, чтобы обозначать ось, которая продолжается по существу параллельно земле, по которой движется транспортное средство. Таким образом, вертикальная ось продолжается по существу перпендикулярно горизонтальной оси. Горизонтальная ось может являться осью, которая продолжается параллельно продольной или главной оси транспортного средства.
Предпочтительно, чтобы опрокидывающие приводы были расположены так, чтобы вращающийся диск мог вращаться вокруг горизонтальной оси, параллельной продольному направлению транспортного средства, и/или карданным образом вокруг горизонтальной оси, по существу перпендикулярной продольному направлению транспортного средства. Предпочтительно, чтобы опрокидывающее устройство содержало опрокидывающую плиту, которая расположена на опрокидывающем соединении. Вращающийся диск и вращательные подшипники расположены на опрокидывающей плите.
С помощью крана, расположенного на опрокидывающем устройстве, содержащем вращающийся диск на вращательных подшипниках, возможно поворачивать кран вокруг вертикальной оси наружу в стороны относительно центральной линии транспортного средства. Таким образом, положение крана может быть определено углом поворота относительно нормального положения, параллельного центральной линии транспортного средства. Является подходящим, если положение прямо впереди в главном направлении движения транспортного средства, параллельном центральной линии транспортного средства, составляет нормальное положение и, таким образом, угол поворота 0°. Таким образом, когда кран направлен прямо назад, он расположен под углом поворота 180°. Таким образом, когда кран направлен прямо в сторону, он расположен под углом поворота 90° или 270°, справа или слева относительно центральной линии транспортного средства. Крутящий момент, который воздействует на опрокидывающее устройство, возникает в зависимости от положения крана относительно центральной линии транспортного средства. Возникающий крутящий момент зависит от нагрузки и положения крана. Крутящий момент приводит к повороту опрокидывающего устройства вокруг горизонтальной оси, посредством чего гидравлические опрокидывающие приводы и их давление подвергаются воздействию. Так как стабилизирующие приводы находятся в соединении по текучей среде с опрокидывающими приводами, давление в стабилизирующих приводах также будет меняться при изменении давления в опрокидывающих приводах. Таким образом, стабилизирующие приводы управляются на основании давления в опрокидывающих приводах, которое вызвано краном. Таким образом, получено адаптивное и чувствительное к нагрузке гидравлическое стабилизирующее устройство, которое распознает реальные возникающие крутящие моменты. Таким образом, достигается система для стабилизации транспортного средства, которая является эффективной и безопасной, и которая может использоваться во время движения транспортного средства.
Благодаря тому факту, что настоящая система является использует опрокидывающее устройство, которое распознает реальное или настоящее смещение центра тяжести посредством измерения сил и крутящих моментов, которые возникают во вращающемся диске, то есть, на границе между верхней частью, которая поддерживает кабину водителя, и краном, который может свободно вращаться относительно нижней рамы или шасси, достигнуто несколько существенных преимуществ по сравнению с технологией уровня техники. В то время как технология уровня техники, как описано, например, в SE 532683, использует противодействующую силу в стабилизирующих приводах, которая была определена заранее и которая основана на статических расчетах, основанных на вращательном положении крана, стоит понимать, что, вместо этого, настоящее изобретение работает активным и динамическим образом. Более точно, настоящее изобретение отличается тем, что оно распознает реальный или правильный крутящий момент, который возникает на указанной границе из-за происходящего смещения центра тяжести. Таким образом, получена стабилизирующая система, которая может уравновешивать транспортное средство посредством создания противодействующей силы также и в случаях, в которых кран расположен в своем нормальном положении под 0°, например, если транспортное средство накреняется во время движения на местности.
Является подходящим, если кабина расположена на опрокидывающем устройстве. Кабина и кран будут, таким образом, перемещаться вместе в одинаковом направлении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вариант осуществления изобретения будет более подробно описан ниже со ссылкой на прилагаемые чертежи, на которых:
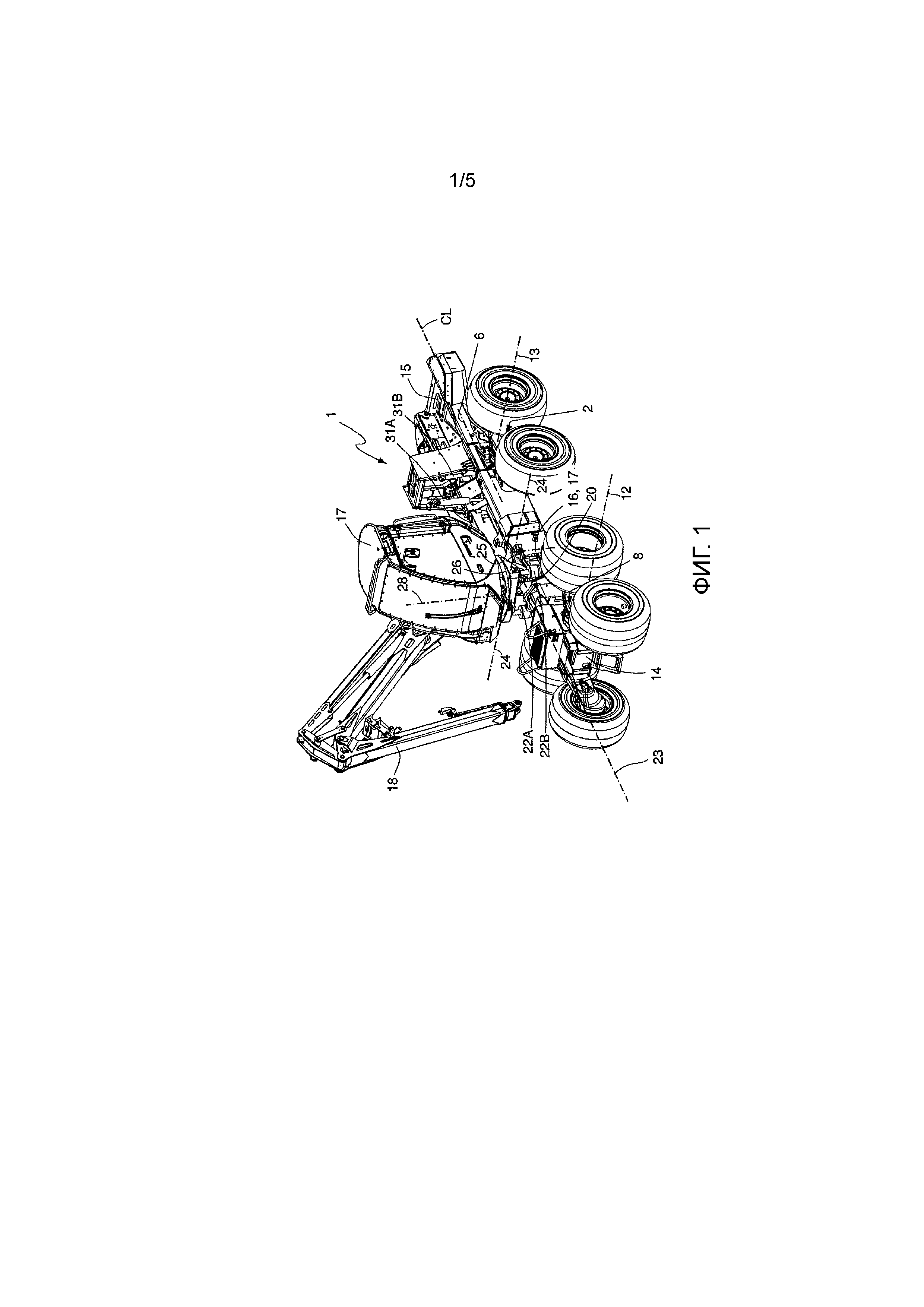
Фигура 1 показывает вид в перспективе транспортного средства, оборудованного краном и содержащего систему для стабилизации согласно изобретению;
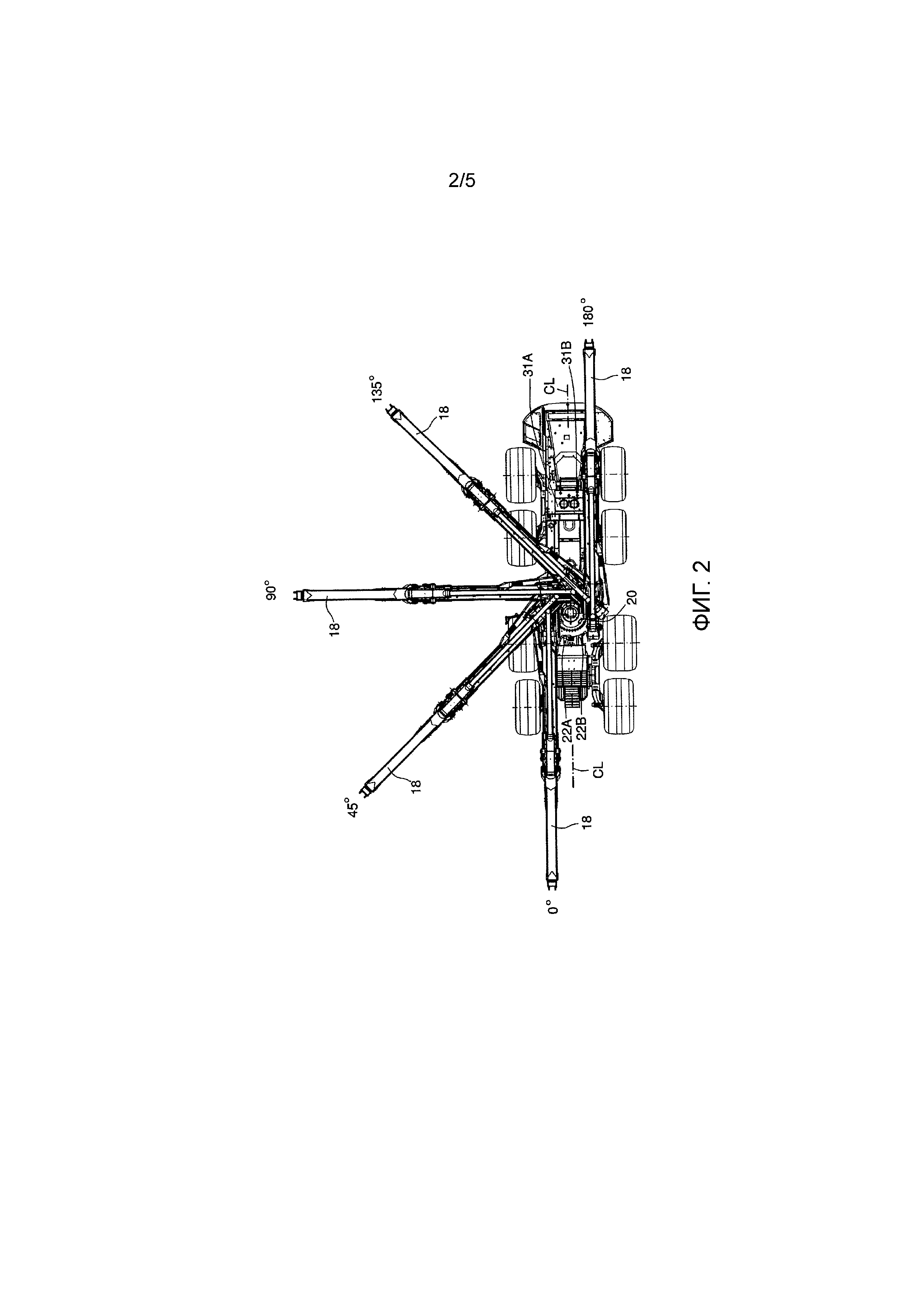
Фигура 2 показывает вид сверху транспортного средства по фигуре 1 с краном, который является компонентом транспортного средства, установленным в несколько вращательных положений в горизонтальной плоскости;
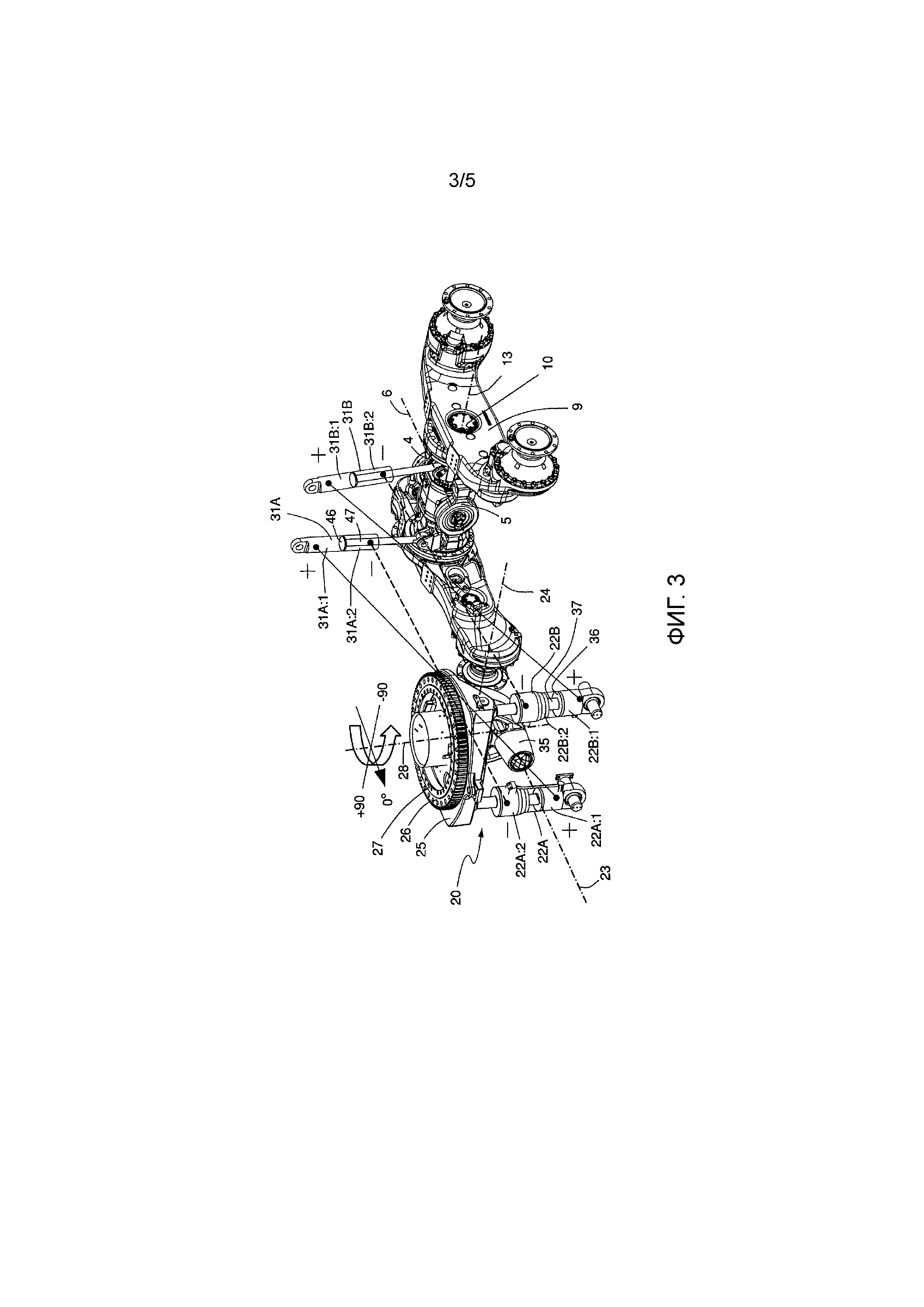
Фигура 3 схематически показывает гидравлическую схему для стабилизации транспортного средства согласно изобретению, посредством чего кран был повернут в первое вращательное положение под 0° относительно главной оси транспортного средства, и, таким образом, направлен прямо вперед в нормальном направлении движения транспортного средства; и
Фигура 4 схематически показывает гидравлическую схему, соответствующую фигуре 3, но в положении, в котором кран был повернут во второе вращательное положение 270° относительно главной оси транспортного средства, и, таким образом, направлен перпендикулярно влево в виде в нормальном направлении движения транспортного средства; и
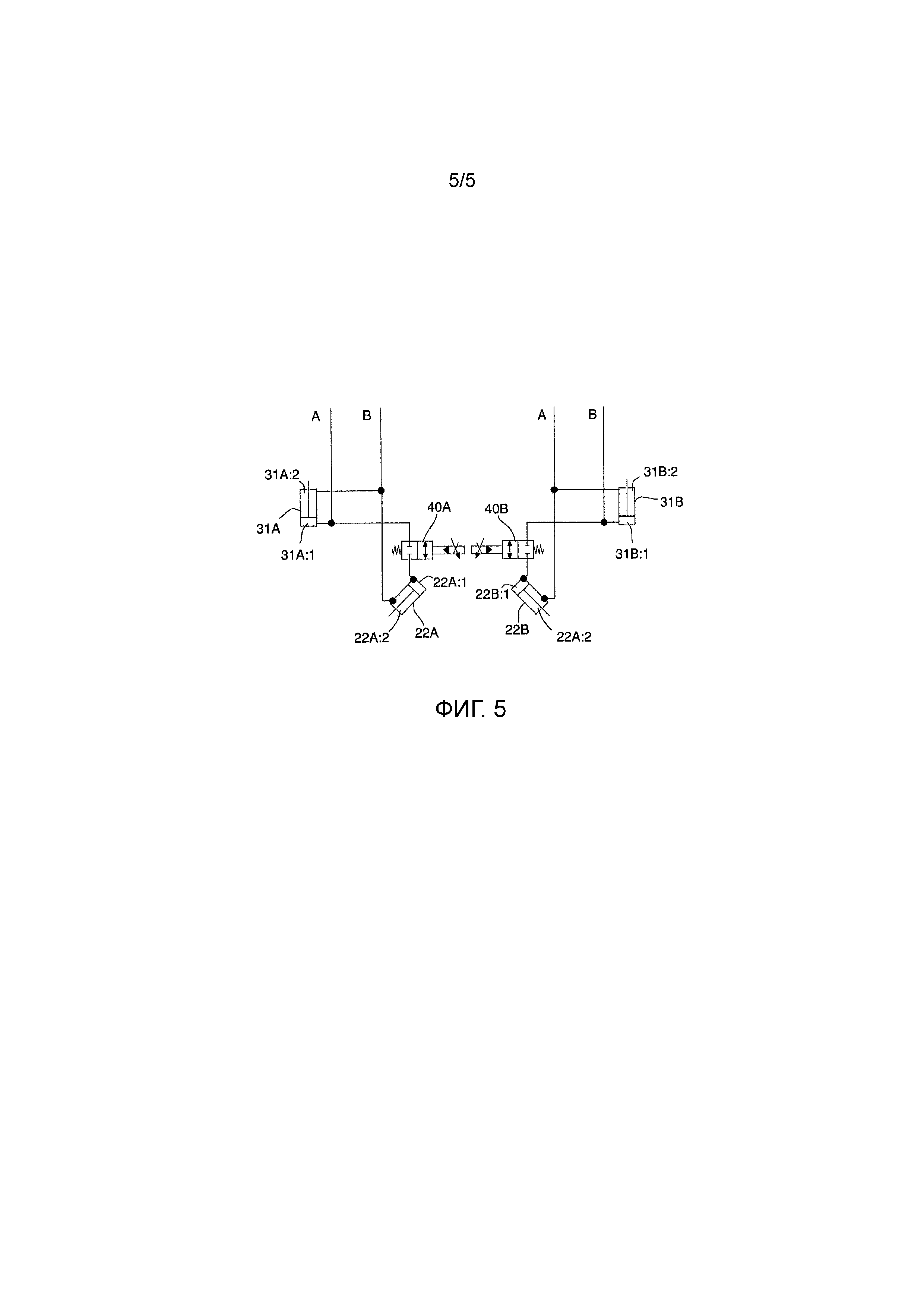
Фигура 5 показывает гидравлическую схему системы согласно изобретению для стабилизации транспортного средства.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фигура 1 схематически показывает транспортное средство, содержащее систему для стабилизации согласно одному из вариантов осуществления настоящего изобретения. Транспортное средство является поворотным и содержит шасси, которое в целом обозначено ссылочной позицией 1. Также со ссылкой на фигуры 3 и 4, система содержит заднюю колесную тележку 2, расположенную на шасси 1, при этом задняя колесная тележка 2 содержит жесткий, центрально установленный маятниковый вал 4, спроектированный для вращения вокруг вращательных подшипников 5, расположенных в центре маятникового вала, с тем чтобы маятниковый вал мог колебаться вокруг оси 6, которая продолжается параллельно продольному направлению главной оси, обозначенной "CL", транспортного средства. Транспортное средство также содержит переднюю колесную тележку 8, расположенную на шасси. Две пары колес расположены на каждой колесной тележке, с каждой стороны от продольной оси транспортного средства. Передняя колесная тележка 8 и задняя колесная тележка 2 могут вращаться, посредством их соответствующих плечей 9 тележки (корпусов тележки) и вращательного сочленения 10, расположенного в центре этого плеча, вокруг соответствующей горизонтальной оси 12, 13, которая продолжается по существу перпендикулярно продольному направлению транспортного средства. Благодаря тележке, способность транспортного средства справляться с неровностями на земле, по которым движется транспортное средство, улучшается. Шасси 1 содержит переднюю раму и заднюю раму 14, 15, соединенные через шарнирное сочленение 16. Шарнирное сочленение 16 вращается вокруг вертикальной оси. Передняя рама 14 и задняя рама 15, таким образом, могут вращаться в боковом направлении относительно друг друга. Транспортное средство содержит цилиндры управления (не показаны на чертежах), которые активны на шарнирном сочленении. Передняя колесная тележка 8 расположена на передней раме 14, а задняя колесная тележка 2 расположена на задней раме 15. Кабина 17 и кран 18 расположены на опрокидывающем устройстве 20 на передней раме 14 шасси. Опрокидывающее устройство 20 содержит первый и второй гидравлические опрокидывающие приводы 22A, 22B, которые позволяют поворачивать кабину 17 и 18 вокруг горизонтальной оси 23, параллельной продольному направлению транспортного средства, и, в варианте осуществления, описанном здесь, также вокруг горизонтальной оси 24, по существу перпендикулярной продольному направлению транспортного средства. Опрокидывающее устройство 20, которое расположено на передней раме 14, также содержит вращающийся диск 26 на вращательных подшипниках 27, что позволяет поворачивать кран 18 и кабину 17 вокруг вертикальной оси 28. Гидравлическое стабилизирующее устройство 30, содержащее первый и второй гидравлические стабилизирующие приводы 31A, 31B, расположено на задней колесной тележке 2. Первый и второй стабилизирующие приводы 31A, 31B следуют движениям маятникового плеча и, таким образом, улучшают комфорт, когда транспортное средство движется по неровной земле. Первый и второй стабилизирующие приводы 31A, 31B находятся в соединении по текучей среде с указанными первым и вторым гидравлическими опрокидывающими приводами 22A, 22B, и, таким образом, расположены, чтобы управляться на основании давления в опрокидывающих приводах. Является подходящим, если опрокидывающие приводы 22A, 22B параллельны и расположены по одному с каждой стороны от центральной линии или продольной оси транспортного средства. Является подходящим, если первый и второй стабилизирующие приводы 31A, 31B расположены параллельным образом по одному с каждой стороны от главной оси транспортного средства. Стабилизирующие приводы 31A, 31B расположены в соединении по текучей среде с соответствующими опрокидывающими приводами 22A, 22B с одной стороны от центральной главной оси транспортного средства. Иными словами, первый стабилизирующий привод 31A находится в переносящем текучую среду соединении с соответствующим первым опрокидывающим приводом 22A с одной стороны, и, соответствующим образом, второй стабилизирующий привод 31B находится в переносящем текучую среду соединении со вторым опрокидывающим приводом 22B с другой стороны. Или, другими словами, указанный первый стабилизирующий привод 31A и первый опрокидывающий привод 22A расположены в соединении по текучей среде, в то время как указанный второй стабилизирующий привод 31B и второй опрокидывающий привод 22B расположены в соединении по текучей среде, посредством чего стабилизирующие приводы управляются на основании давления в опрокидывающих приводах. Опрокидывающее устройство 20 и стабилизирующее устройство 30 более подробно описаны в связи с фигурами 2, 3 и 4.
Фигура 2 схематически показывает транспортное средство 1, содержащее систему 100 для стабилизации согласно одному из вариантов осуществления настоящего изобретения. Транспортное средство показано в виде сверху. Транспортное средство спроектировано, как описано на фигуре 1. С помощью крана 18, расположенного на опрокидывающем устройстве 20, содержащем вращающийся диск 26 на вращательных подшипниках 27, возможно поворачивать кран вокруг вертикальной оси 28 наружу в стороны относительно центральной линии CL транспортного средства. Таким образом, положение крана 18 может быть определено углом поворота относительно нормального положения, параллельного центральной линии CL транспортного средства. Положение прямо впереди в главном направлении движения транспортного средства, параллельном центральной линии CL транспортного средства, может быть названо, как составляющее нормальное положение, и, таким образом, имеющее угол поворота 0°. Таким образом, когда кран 18 направлен прямо назад, он расположен под углом поворота 180°. Таким образом, когда кран 18 направлен в сторону, прямо вправо или влево относительно центральной линии CL транспортного средства, он расположен под углом поворота 90° или 270° (-90°). Крутящий момент, который влияет на опрокидывающее устройство 20, генерируется в зависимости от положения крана 18 относительно центральной линии CL транспортного средства, с тем чтобы опрокидывающее устройство поворачивалось либо вокруг горизонтальной оси 23, параллельной центральной линии транспортного средства, либо вокруг горизонтальной оси 24, по существу перпендикулярной центральной линии транспортного средства. Возникающий крутящий момент зависит от нагрузки и положения крана. Если крутящему моменту, который генерируется краном 18, не оказывается противодействие, то есть, если он не уравновешивается противодействующей силой, транспортное средство стремится опрокинуться в направлении крутящего момента. Чем дальше от транспортного средства будет вытянут кран, тем выше будет получаемый крутящий момент, и тем выше будет риск опрокидывания транспортного средства, если крутящему моменту не оказывается противодействие. Таким образом, крутящий момент приводит к повороту опрокидывающего устройства 20 вокруг горизонтальной оси 23, посредством чего гидравлические опрокидывающие приводы 22A, 22B и их внутреннее давление подвергаются воздействию. Так как стабилизирующие приводы 31A, 31B находятся в соединении по текучей среде с опрокидывающими приводами 22A, 22B, давление в стабилизирующих приводах также будет меняться при изменении давления в опрокидывающих приводах. Таким образом, стабилизирующие приводы 31A, 31B управляются на основании давления в опрокидывающих приводах, которое вызвано краном. Стабилизирующие приводы 31A, 31B находятся в соединении по текучей среде с опрокидывающими приводами 22A, 22B, с тем чтобы давление в стабилизирующих приводах приводило к силе, которая противодействует возникшему крутящему моменту. Таким образом, получено гидравлическое чувствительное к нагрузке стабилизирующее устройство, которое генерирует противодействующую силу, которая прямо пропорциональна возникшему крутящему моменту. Таким образом, получена стабилизирующая система для транспортного средства, которая является эффективной и безопасной, и которая может использоваться во время движения транспортного средства. Благодаря тому факту, что настоящая система является чувствительной к нагрузке посредством гидравлики и использует опрокидывающее устройство 20, которое распознает реальное или настоящее смещение центра тяжести, который образуется в результате вращательного положения крана 18, и измеряет силы и крутящие моменты, которые возникают во вращающемся диске 26 и вращательных подшипниках 27, то есть, на границе между верхней частью, поддерживающей кабину водителя, и краном, который может свободно вращаться относительно нижней рамы или шасси на транспортном средстве, достигнуты существенные преимущества по сравнению с технологией уровня техники. Создаваемый опрокидывающий крутящий момент крана 18 и противодействие маятниковой тележки 2 прямо пропорциональны опрокидывающему крутящему моменту (нагрузке) крана. Система является чувствительной к нагрузке посредством гидравлики. Если кран 18 повернут в противоположном направлении, противодействие и давление будут противоположными.
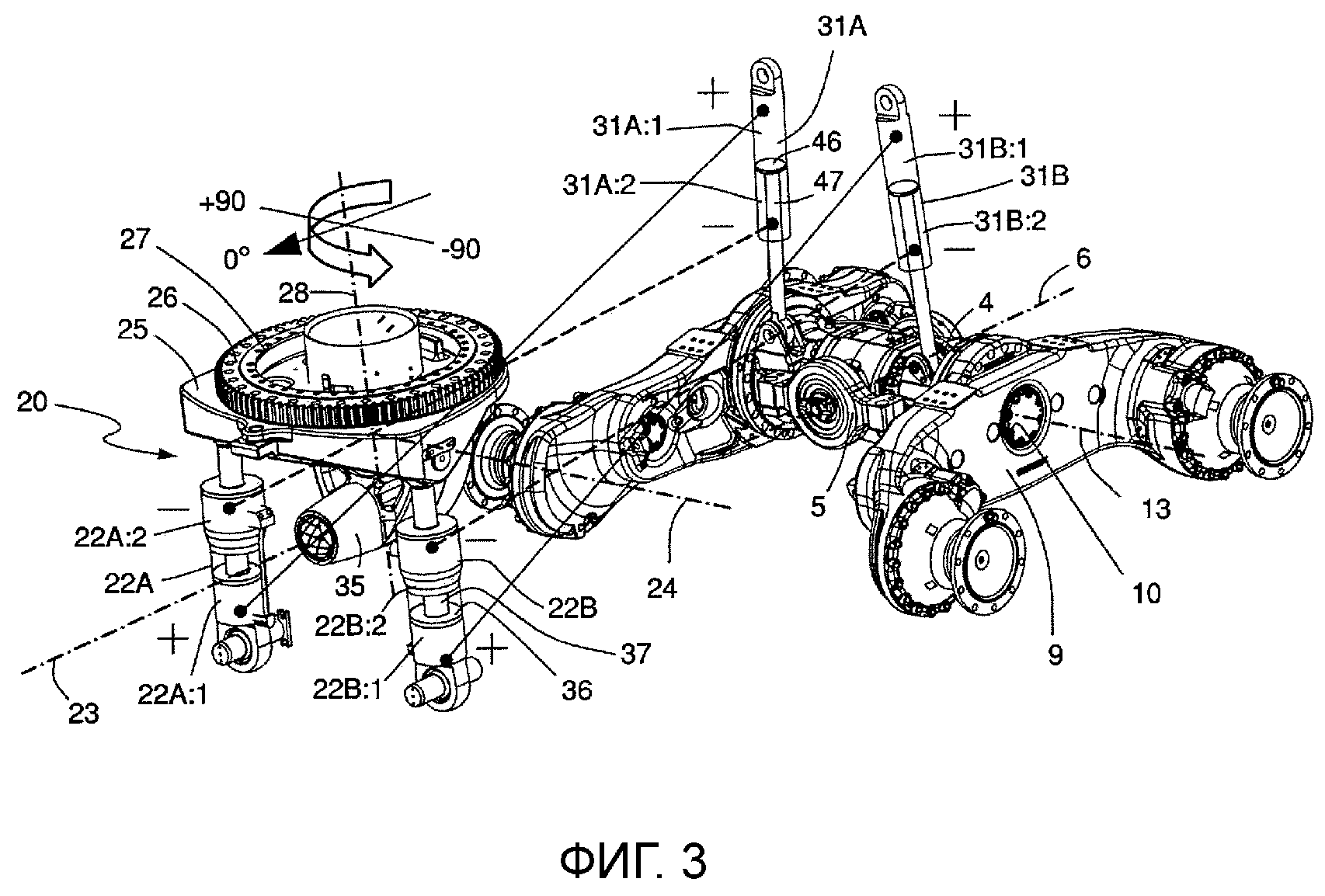
Фигура 3 схематически показывает систему для стабилизации транспортного средства согласно настоящему изобретению. Транспортное средство 1 спроектировано образом, который описан на фигурах 1 и 2, посредством чего кран 18 расположен прямо впереди в главном направлении движения транспортного средства. Таким образом, кран 18 имеет положение с углом поворота 0°, который проиллюстрирован на чертеже стрелкой. Опрокидывающее устройство 20 содержит опрокидывающую плиту 25, которая расположена на опрокидывающем соединении 35, включающем в себя блок, с помощью которого опрокидывающая плита 25 подвешена карданным образом и выполнена с возможностью вращательного перемещения вокруг двух перпендикулярных осей, включающих в себя указанную горизонтальную ось 23, параллельную продольному направлению транспортного средства, и указанную горизонтальную ось 24, перпендикулярную продольному направлению транспортного средства. Указанный вращающийся диск 26 и вращательные подшипники 27 расположены на опрокидывающей плите 25. Первый и второй опрокидывающие приводы 22A, 22B, таким образом, позволяют, посредством опрокидывающего соединения 35, опрокидывающей плите 25 вращаться вокруг указанной горизонтальной оси 23, параллельной продольному направлению транспортного средства, и вокруг указанной горизонтальной оси 24, перпендикулярной продольному направлению транспортного средства.
Каждый опрокидывающий привод 22A, 22B состоит из гидравлического цилиндра двойного действия, содержащего поршень 36 и шток 37 поршня, при этом первые и вторые камеры 22A:1, 22B:1; 22A:2, 22B:2, соответственно, образованы с каждой стороны от поршня 36. Первая камера и вторая камера имеют переменные объемы, которые зависят от положения поршня в цилиндре. Опрокидывающие приводы 22A, 22B расположены так, что вторая камера 22A:2; 22B:2, камера штока поршня, расположена ближе всех к крану 18, в то время как первая камера 22A:1; 22B:1, камера поршня, расположена ближе всех к земле, по которой движется транспортное средство. Опрокидывающие приводы 22A, 22B также могут быть известны, как "опрокидывающие цилиндры". Когда опрокидывающий привод 22A, 22B сжимается или сдавливается в убранное состояние, поршень 36 перемещается в таком направлении, чтобы первая камера 22A:1; 22B:1 уменьшалась, а вторая камера 22A:2; 22B:2 расширялась. Когда первая камера 22A:1; 22B:1 уменьшается, высокое давление достигается в первой камере относительно давления во второй камере 22A:2; 22B:2, которое, таким образом, становится ниже. Соответственно, первая камера 22A:1; 22B:1 расширяется, а вторая камера 22A:2; 22B:2 уменьшается, когда опрокидывающий цилиндр принимает вытянутое состояние. Высокое давление, таким образом, образуется во второй камере 22A:2; 22B:2 относительно давления в первой камере 22A:1; 22B:1.
Схожим образом, каждый стабилизирующий привод 31A, 31B состоит из гидравлического цилиндра двойного действия, содержащего поршень 46 и шток 47 поршня, при этом первая камера 31A:1, 31B:1, то есть, камера поршня, образована с первой стороны поршня, а вторая камера 31A:2, 31B:2, заключающая шток поршня, то есть, камера штока поршня, образована со второй стороны поршня. Первая камера 31A:1, 31B:1 и вторая камера 31A:2, 31B:2 имеют переменные объемы, которые зависят от положения поршня 46 в цилиндре. Стабилизирующие приводы 31A, 31B расположены так, что их вторые камеры 31A:2, 31B:2 расположены ближе всех к земле, по которой движется транспортное средство. Стабилизирующие приводы также могут быть известны, как "стабилизирующие цилиндры". Стабилизирующие приводы 31A, 31B расположены так, что, когда стабилизирующий привод сжимается или сдавливается в убранное состояние, первая камера 31A:1, 31B:1 уменьшается, а вторая камера 31A:2, 31B:2 расширяется. Соответственно, первая камера 31A:1; 31B:1 расширяется, а вторая камера уменьшается, когда стабилизирующий цилиндр принимает вытянутое состояние.
Площади поперечного сечения цилиндров стабилизирующих приводов 31A, 31B существенно меньше, чем площади цилиндров опрокидывающих приводов 22A, 22B. Площади поршней стабилизирующих приводов 31A, 31B, как следствие, существенно меньше, чем площади поршней опрокидывающих приводов 22A, 22B. Вследствие этого, движение на опрокидывающем устройстве 20 будет меньше, чем движение на стабилизирующем устройстве 30. Изменение в давлении в опрокидывающих приводах 22A, 22B, таким образом, приводит к более сильному смещению поршня 46 и штока 47 поршня на соответствующем стабилизирующем приводе 31A, 31B, чем эффект, который изменение в давлении в стабилизирующих приводах 31A, 31B оказывает на поршень 36 и шток 37 поршня опрокидывающих приводов.
Первая камера 31A:1, 31B:1 на каждом стабилизирующем приводе 31A, 31B расположена в соединении по текучей среде с первой камерой 22A:1; 22B:1 на опрокидывающем приводе 22A, 22B, который расположен с той же стороны от центральной линии транспортного средства, в то время как вторая камера 31A:2, 31B:2 на каждом стабилизирующем приводе 31A, 31B расположена в соединении по текучей среде со второй камерой 22A:2; 22B:2 на опрокидывающем приводе 22A, 22B, расположенном с той же стороны.
Как показано на фигуре 5, первый и второй стабилизирующие клапаны 40A, 40B расположены в соединении по текучей среде с опрокидывающим приводом 22A и стабилизирующим приводом 31A, в то время как второй стабилизирующий клапан 40B расположен в соединении по текучей среде со вторым опрокидывающим приводом 22B. Стабилизирующий клапан 40A, 40B может быть расположен в соединении с первой камерой 22A:1; 22B:1; 31A:1, 31B:1 на соответствующем опрокидывающем приводе 22A, 22B и стабилизирующем приводе 31A, 31B. Является подходящим, если стабилизирующие клапаны 40A, 40B являются электрически управляемыми клапанами. Они показаны на чертеже в своем не приведенном в действие, не проводящем ток состоянии. Является подходящим, если блок управления (не показан на чертежах) расположен в соединении со стабилизирующими клапанами, при этом блок управления может переключать стабилизирующие клапаны между их открытым состоянием и их закрытым состоянием. Когда транспортное средство движется по транспортной дороге, стабилизирующие клапаны 40A, 40B надлежащим образом установлены в проводящее ток открытое состояние. Таким образом, первая камера 22A:1; 22B:1; 31A:1, 31B:1 на соответствующем стабилизирующем приводе 31A, 31B находится в соединении по текучей среде с первой камерой на соответствующем опрокидывающем приводе 22A, 22B во время движения, при этом стабилизирующие приводы непрерывно управляются на основании давления в опрокидывающих приводах 22A, 22B. Стабилизирующие приводы 31A, 31B, таким образом, непрерывно формируют силу, которая противодействует крутящему моменту, который вызван краном 18.
На фигуре 3 проиллюстрировано состояние, в котором кран 18 находится под углом поворота 0°, в то время как транспортное средство движется вперед или назад. Положение и нагрузка крана 18 приводит, в данном случае, к формированию крутящего момента, как можно понять при изучении фигуры 2. Крутящий момент воздействует на опрокидывающее устройство 20, с тем чтобы опрокидывающая плита 25 повернулась вперед вокруг горизонтальной оси 24, которая по существу перпендикулярна центральной линии CL транспортного средства. Когда опрокидывающая плита 25 поворачивается вокруг горизонтальной оси 24 в направлении крутящего момента, опрокидывающие приводы 22A, 22B сжимаются. Таким образом, первая камера 22A:1,22B:1 на соответствующем опрокидывающем приводе 22A, 22B подвергается давлению и уменьшается в объеме, при этом высокое давление достигается в соответствующей первой камере. Это проиллюстрировано символом плюс на чертеже. В то же время, вторая камера 22A:2, 22B:2 на соответствующем опрокидывающем приводе 22A, 22B расширяется, при этом сравнительно низкое давление достигается в соответствующей второй камере. Это проиллюстрировано символом минус на чертеже. Так как первая камера 31A:1; 31B:1 на соответствующем стабилизирующем приводе 31A, 31B находится в соединении по текучей среде с первой камерой 22A:1; 22B:1 на опрокидывающих приводах 22A, 22B, высокое давление достигается также в первых камерах стабилизирующих приводов. Это схожим образом проиллюстрировано символом плюс на чертеже. Когда давление в первой камере 31A:1, 31B:1 в соответствующем стабилизирующем приводе 31A, 31B становится высоким, давление воздействует на поршень 46, и первая камера 31A:1, 31B:1 в указанном стабилизирующем приводе расширяется. Это соединение по текучей среде, которое работает со сравнительно высоким давлением и лежит между указанными опрокидывающими приводами 22A, 22B и стабилизирующими приводами 31A, 31B, проиллюстрировано на чертеже сплошной линией. Когда транспортное средство движется по неровной земле, маятниковый вал 4 будет вращаться вокруг вращательных подшипников 5 и горизонтальной оси 6, параллельной центральной линии транспортного средства. Когда первые камеры 31A:1, 31B:1 стабилизирующих приводов 31A, 31B подвержены схожему высокому давлению, задняя колесная тележка 2 будет следовать земле плавным и гибким образом. Так как кран 18 направлен прямо вперед в главном направлении движения транспортного средства, шасси не подвергается воздействию в боковом направлении, и, таким образом, никакая противодействующая сила, стоящая упоминания, не достигается на стабилизирующих приводах 31A, 31B.
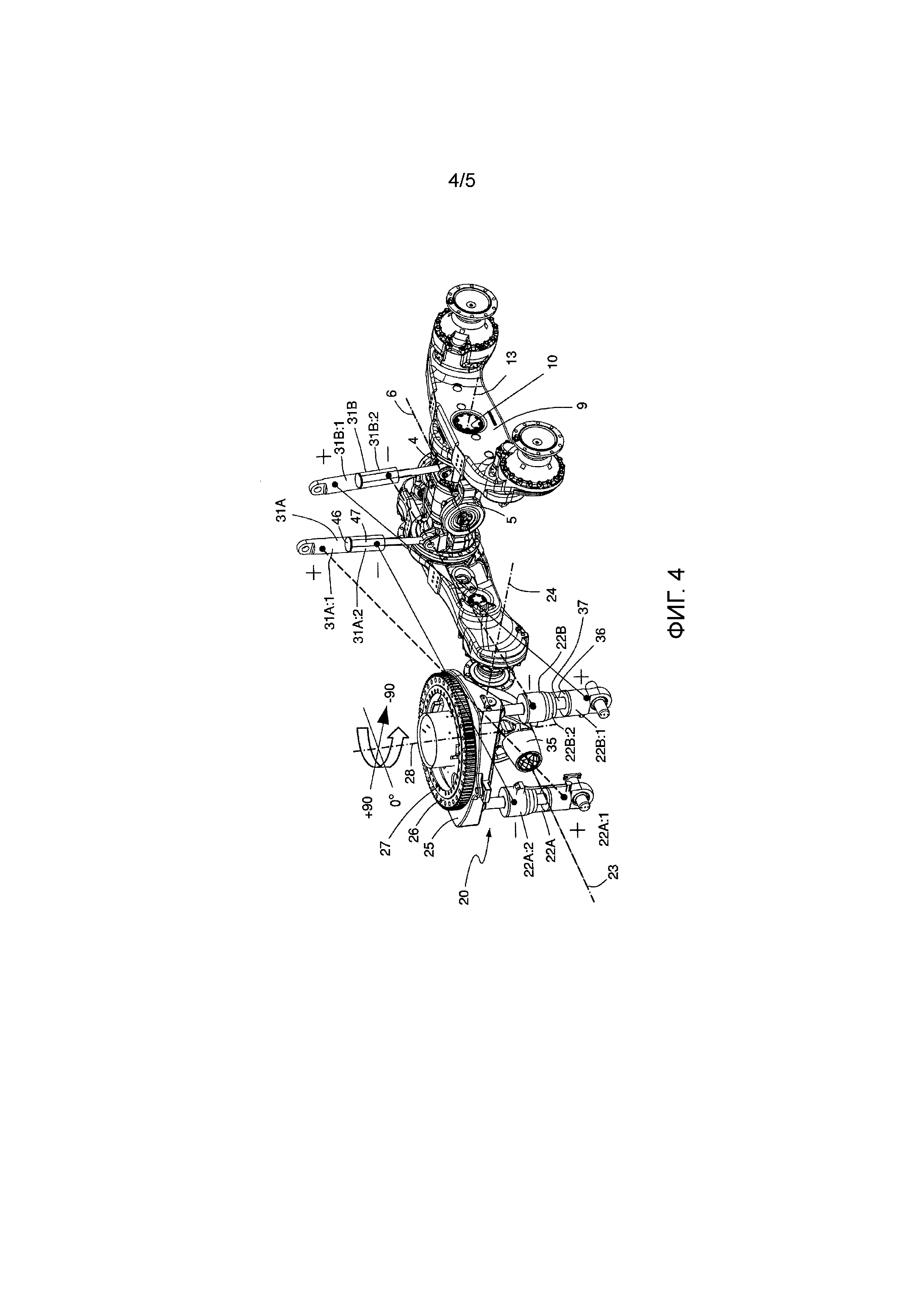
Фигура 4 схематически иллюстрирует состояние, в котором кран 18 расположен прямо сбоку относительно центральной линии CL транспортного средства. Таким образом, кран 18 был повернут в положение по существу 90° слева относительно центральной линии транспортного средства. Когда транспортное средство движется вперед или назад, и кран повернут на 90° относительно центральной линии транспортного средства, кран формирует крутящий момент, который направлен в том же направлении, что и кран, что можно понять при изучении фигуры 2. Крутящий момент воздействует на опрокидывающее устройство 20, с тем чтобы опрокидывающая плита 25 повернулась вокруг горизонтальной оси 23, параллельной центральной линии CL транспортного средства. Опрокидывающее устройство 20, таким образом, наклонено влево в виде в нормальном переднем направлении движения транспортного средства. Опрокидывающий привод 22B, который расположен с левой стороны от центральной линии CL, таким образом, сжимается в то же время, когда опрокидывающий привод 22A с правой стороны от центральной линии достигает вытянутого состояния. Первая камера 22B:1 в левом опрокидывающем приводе 22B, таким образом, уменьшается и достигает сравнительно высокого давления. В то же время, объем второй камеры 22A:2 в правом опрокидывающем приводе 22A уменьшается и достигает высокого давления. Так как давление в первой камере 22B:1 в левом опрокидывающем приводе 22B высокое, первая камера 31B:1 в левом стабилизирующем приводе 31B подвергается высокому давлению. Когда давление в первой камере 31B:1 в левом стабилизирующем приводе 31B возрастает, давление воздействует на поршень, и первая камера 31B:1 расширяется. Таким образом, создается сила, которая противодействует силе, которая воздействует на левый опрокидывающий привод 22B. Так как давление во второй камере 22A:2 в правом опрокидывающем приводе 22A высокое, вторая камера 31A:2 в правом стабилизирующем приводе 31A будет, таким образом, подвергаться высокому давлению. Давление во второй камере 31A:2 в правом стабилизирующем приводе 31A воздействует на поршень 46, с тем чтобы первая камера 31A:1 уменьшалась. Это соединение по текучей среде, которое работает со сравнительно высоким давлением и лежит между противоположными камерами указанных опрокидывающих приводов 22A, 22B и стабилизирующих приводов 31A, 31B, проиллюстрировано на чертеже сплошной линией. Таким образом, создается сила, которая противодействует силе, которая воздействует на правый опрокидывающий привод 22A. Противодействующие силы, возникающие в стабилизирующих приводах 31A, 31B, противодействуют крутящему моменту, который воздействует на опрокидывающее устройство 20. Противодействующие силы стабилизирующих приводов 31A, 31B прямо пропорциональны крутящему моменту и, таким образом, обеспечивают, чтобы транспортное средство не опрокидывалось в направлении крана.
Настоящее изобретение также относится к способу для стабилизации транспортного средства, который содержит систему для стабилизации транспортного средства типа, который описан на фигурах 3 и 4.
Способ содержит этап a) управления двумя стабилизирующими приводами 31A, 31B на основании давления в двух опрокидывающих приводах 22A, 22B на опрокидывающем устройстве 20 посредством обеспечения того, чтобы стабилизирующие приводы находились в соединении по текучей среде с опрокидывающими приводами, при этом опрокидывающие приводы расположены в соединении с опрокидывающей плитой 25, с тем чтобы опрокидывающая плита могла вращаться относительно шасси вокруг горизонтальной оси 23, 24.
Является подходящим, если способ касается способа для стабилизации транспортного средства, в котором транспортное средство содержит шасси 1 с передней колесной тележкой 8 и задней колесной тележкой 2. Транспортное средство дополнительно содержит кран, который расположен на опрокидывающем устройстве 20. Является подходящим, если транспортное средство дополнительно оборудовано кабиной 17, которая также расположена на опрокидывающем устройстве 20. Шасси 1 транспортного средства может быть образовано из передней рамы 14 и задней рамы 15, при этом передняя колесная тележка расположена на передней раме, а задняя колесная тележка расположена на задней колесной тележке. Является подходящим, если опрокидывающее устройство 20 расположено на передней раме 14 шасси, и если стабилизирующее устройство 30, таким образом, расположено на задней раме 15.
Каждый опрокидывающий привод 22A, 22B может состоять из цилиндра двойного действия, содержащего поршень 36 и шток 37 поршня, так, что первая камера 22A:1, 22B:1 образована с первой стороны поршня, а вторая камера 22A:2, 22B:2, которая заключает шток 37 поршня, образована со второй стороны поршня. Каждый стабилизирующий привод 31A, 31B может, таким же образом, состоять из цилиндра двойного действия, содержащего поршень 46 и шток 47 поршня, так, что первая камера 31A:1, 31B:1 образована с первой стороны поршня, а вторая камера 31A:2, 31 B:2, которая заключает шток поршня, образована со второй стороны поршня.
Согласно способу, первая камера 31A:1; 31B:1 на соответствующем стабилизирующем приводе 31A, 31B может быть размещена в соединении по текучей среде с первой камерой 22A:1, 22B:1 на соответствующем опрокидывающем приводе 22A, 22B, а вторая камера 31A:2, 31B:2 - на соответствующем стабилизирующем приводе 31A, 31B в соединении по текучей среде со второй камерой 22A:2; 22B:2 на соответствующем опрокидывающем приводе 22A, 22B. Таким образом, обеспечивается, чтобы первая камера 31A:1 на одном из стабилизирующих приводов 31A находилась в соединении по текучей среде с первой камерой 22A:1 на одном из опрокидывающих приводов 22A, и чтобы первая камера 31B:1 на втором стабилизирующем приводе 31B находилась в соединении по текучей среде с первой камерой 22B:1 на втором опрокидывающем приводе 22B. Указанные взаимодействующие стабилизирующие приводы 31A и 31B и опрокидывающие приводы 22A и 22B расположены для каждого контура, по одному с каждой стороны от центральной линии транспортного средства и в соединении по текучей среде друг с другом.
Способ также может содержать установку двух, первого и второго, стабилизирующих клапанов 40A, 40B в открытое состояние, при этом каждый стабилизирующий клапан расположен в соединении по текучей среде с соответствующим стабилизирующим приводом 31A, 31B и соответствующим опрокидывающим приводом 22A, 22B. Является подходящим, если каждый стабилизирующий клапан 40A, 40B расположен, когда он находится в своем проводящем ток состоянии, в соединении по текучей среде с первой камерой 31A:1, 31B:1 на стабилизирующем приводе 31A, 31B и опрокидывающем приводе 22A, 22B. Является подходящим, если вторая камера 31A:2, 31B:2 на соответствующем стабилизирующем приводе 31A, 31B всегда находится в соединении по текучей среде с опрокидывающим приводом 22A, 22B, без необходимости открывать стабилизирующий клапан 40A, 40B. Можно представить, в качестве альтернативы, что стабилизирующие клапаны 40A, 40B расположены в соединении по текучей среде с соответствующими вторыми камерами 22A:2, 22B:2; 31A:2, 31B:2 стабилизирующих приводов 31A, 31B и опрокидывающих приводов 22A, 22B. Является подходящим, если стабилизирующие клапаны управляются электронным блоком управления.
Способ может содержать этап b) блокировки стабилизирующего устройства 30 посредством остановки соединения по текучей среде между первыми камерами 31A:1, 31B:1 и/или вторыми камерами стабилизирующих приводов 31A, 31B и первыми камерами 22A:1, 22B:1 и/или вторыми камерами опрокидывающих приводов 22A, 22B. Может быть желательно, в конкретных рабочих условиях, например, когда транспортное средство является неподвижным или выключено, блокировать стабилизирующее устройство 30, чтобы поддерживать противодействующую силу со стороны стабилизирующих приводов. Посредством остановки соединения по текучей среде между либо первыми камерами, либо вторыми камерами стабилизирующих приводов 31A, 31B и опрокидывающих приводов 22A, 22B, давление в камерах стабилизирующих приводов поддерживается, и противодействующая сила стабилизирующих приводов блокируется, с тем чтобы обмен посредством потока не происходил через стабилизирующий клапан 40A, 40B. Является подходящим, если стабилизирующее устройство блокируется посредством блока управления, устанавливающего клапаны в нормальное состояние, в котором не протекает ток, как показано на фигуре 5, когда транспортное средство выключено.
Устройство для уменьшения воздействия транспортного средства на землю и транспортное средство, содержащее упомянутое устройство
Конструкция дополнительных колес для транспортного средства и транспортное средство
Конструкция дополнительных колес для транспортного средства и транспортное средство
Устройство направления шланга для кранового инструмента
Гусеничный узел и транспортное средство с гусеничным приводом, оборудованное таким гусеничным узлом
Гусеничный узел и транспортное средство с гусеничным приводом, оборудованное таким гусеничным узлом

