Результат интеллектуальной деятельности: СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области авиационной техники, а именно, к системам несущих винтов летательных аппаратов.
Известны системы соосных несущих винтов, служащие для создания подъемной силы и для управления летательным аппаратом, реализованные на вертолетах Ка-26, Ка-32 и описанные в руководствах по технической эксплуатации этих вертолетов, изданных фирмой «Камов».
Наиболее близким из известных конструкторских решений является система соосных несущих винтов вертолета Ка-32, содержащая редуктор с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов.
Также система соосных несущих винтов вертолета Ка-32 содержит цепи управления каждым из несущих винтов, включающие два автомата перекоса -нижний и верхний, две ползушки - нижнюю и верхнюю, механизм общего и дифференциального шага и тяги, связывающие эти агрегаты, причем автомат перекоса нижний - нижнего несущего винта -установлен неподвижно на верхней части редуктора и связан с осевыми шарнирами лопастей нижнего несущего винта тягами через качалки нижней ползушки, а автомат перекоса верхний - верхнего несущего винта - установлен на валу редуктора, в пространстве между верхним и нижним несущими винтами, и связан с нижним автоматом перекоса тягами, обеспечивающими параллельность наклонов верхнего и нижнего автоматов перекоса.
Автомат перекоса верхний связан тягами, через качалки верхней ползушки, с осевыми шарнирами лопастей верхнего несущего винта. Ползушки - верхняя и нижняя - установлены на валу верхнего несущего винта, в пространстве между верхним и нижним винтами, и связаны посредством болтов в прорезях вала и тяг, пропущенных внутри вала, с установленным в нижней части редуктора рычажно-винтовым механизмом, управляющим общим и дифференциальным шагом несущих винтов.
У прототипа - несущей системы вертолета Ка-32 - так же, как и у других известных несущих систем вертолетов с шарнирным креплением лопастей к втулке, в полете, в результате так называемого «косого» обтекания несущего винта, имеет место боковой завал конуса несущего винта. У соосных вертолетов несущие винты вращаются в противоположных направлениях, поэтому в полете боковые завалы конусов верхнего и нижнего несущих винтов также имеют диаметрально противоположные направления, что приводит к сближению с одной стороны вертолета концов лопастей верхнего и нижнего несущих винтов. На малой скорости полета сближение лопастей происходит сзади - слева от вертолета, по мере роста скорости конусы несущих винтов вначале выравниваются, а при больших скоростях полета начинают заваливаться в противоположную сторону, что приводит к сближению концов лопастей верхнего и нижнего несущих винтов спереди - справа.
Сближение лопастей приводит к летным ограничениям, снижает безопасность полета.
У прототипа - системы соосных несущих винтов вертолета Ка-32 - наружные вращающиеся кольца верхнего и нижнего автоматов перекоса связаны между собой тягами для передачи, через плоскость вращающегося нижнего винта, управляющего воздействия от нижнего автомата перекоса, связанного с ручкой управления, к верхнему автомату перекоса. Такое конструктивное решение не позволяет устранять встречные боковые завалы конусов верхнего и нижнего несущих винтов путем корректирующих наклонов верхнего и нижнего автоматов перекоса в диаметрально противоположных направлениях.
Целью предполагаемого изобретения является создание системы двух соосных несущих винтов, не имеющих сближения концов лопастей несущих винтов, на всех азимутах во всем диапазоне скоростей поступательного полета вертолета.
Указанная цель в предлагаемой соосной несущей системе достигается применением двух, не связанных между собой непосредственно автоматов перекоса - автомата перекоса верхнего винта и автомата перекоса нижнего винта, и применением в цепях продольного и поперечного управлений дополнительного дифференциального управления циклическим шагом лопастей верхнего и нижнего несущих винтов, которое для устранения завалов конусов несущих винтов в поступательном полете вертолета наклоняет автоматы перекоса верхнего и нижнего несущих винтов в диаметрально противоположных направлениях на одинаковую величину.
Величина и направления дифференциальных наклонов автоматов перекоса в цепях продольного и поперечного управлений может осуществляться вручную, либо автоматически - по специальной программе, отстроенной в зависимости от скорости полета вертолета, либо автоматически - в зависимости от сигналов, получаемых от датчиков (например, индукционных у расположенных на концах лопастей), измеряющих расстояние между лопастями верхнего и нижнего несущих винтов в полете. Таким образом, выдерживается одинаковое расстояние между лопастями верхнего и нижнего винтов на всех азимутах, во всем диапазоне скоростей, чем исключается возможность их сближения и схлестывания в полете.
При этом наложение на автоматы перекоса дополнительного дифференциального управления циклическим шагом, при котором оба автомата перекоса наклоняются в диаметрально противоположных направлениях на одинаковую величину, не вносит каких-либо ограничений в обычное продольно - поперечное управление вертолетом, при котором оба автомата перекоса наклоняются в одну сторону на одинаковую величину.
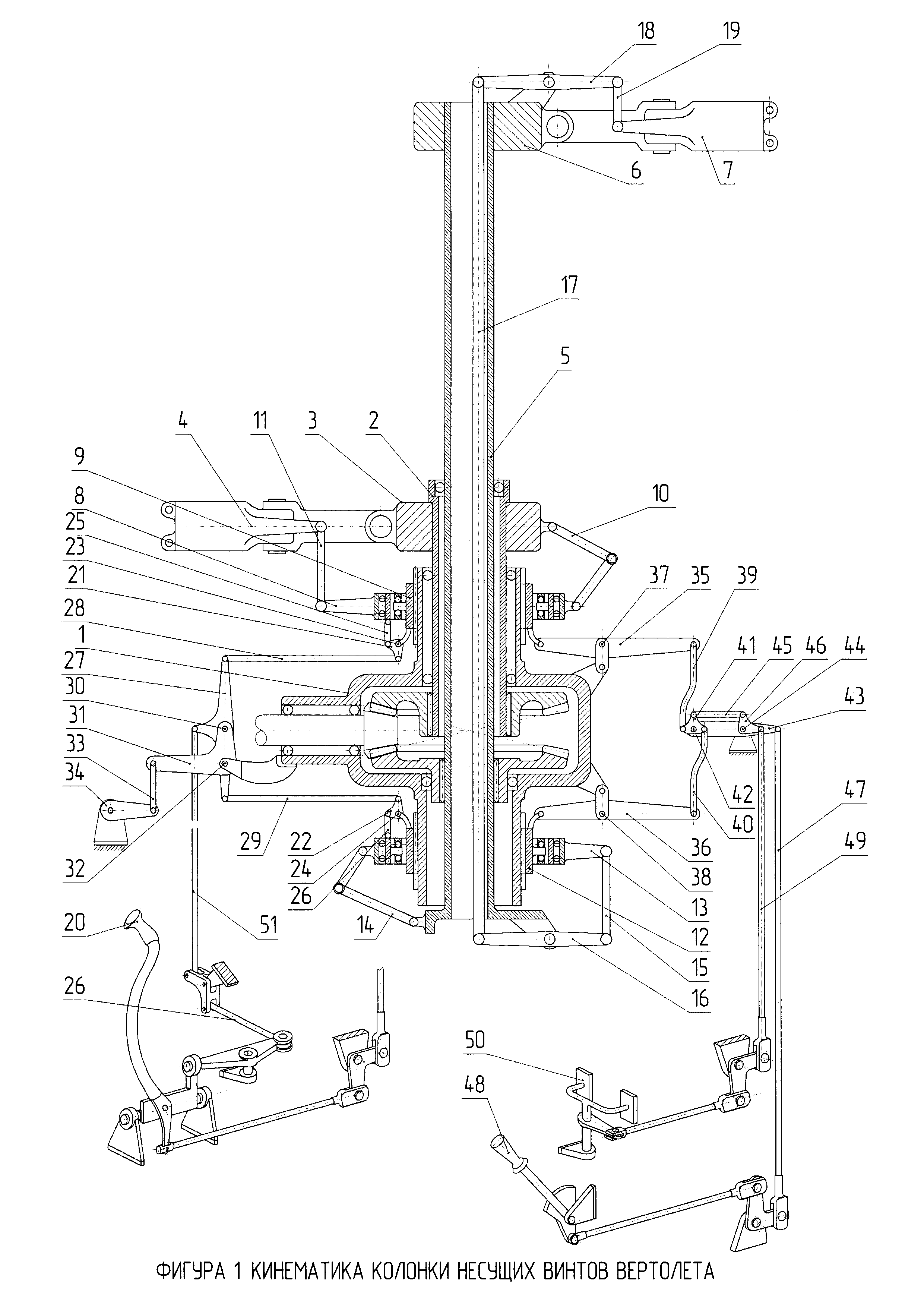
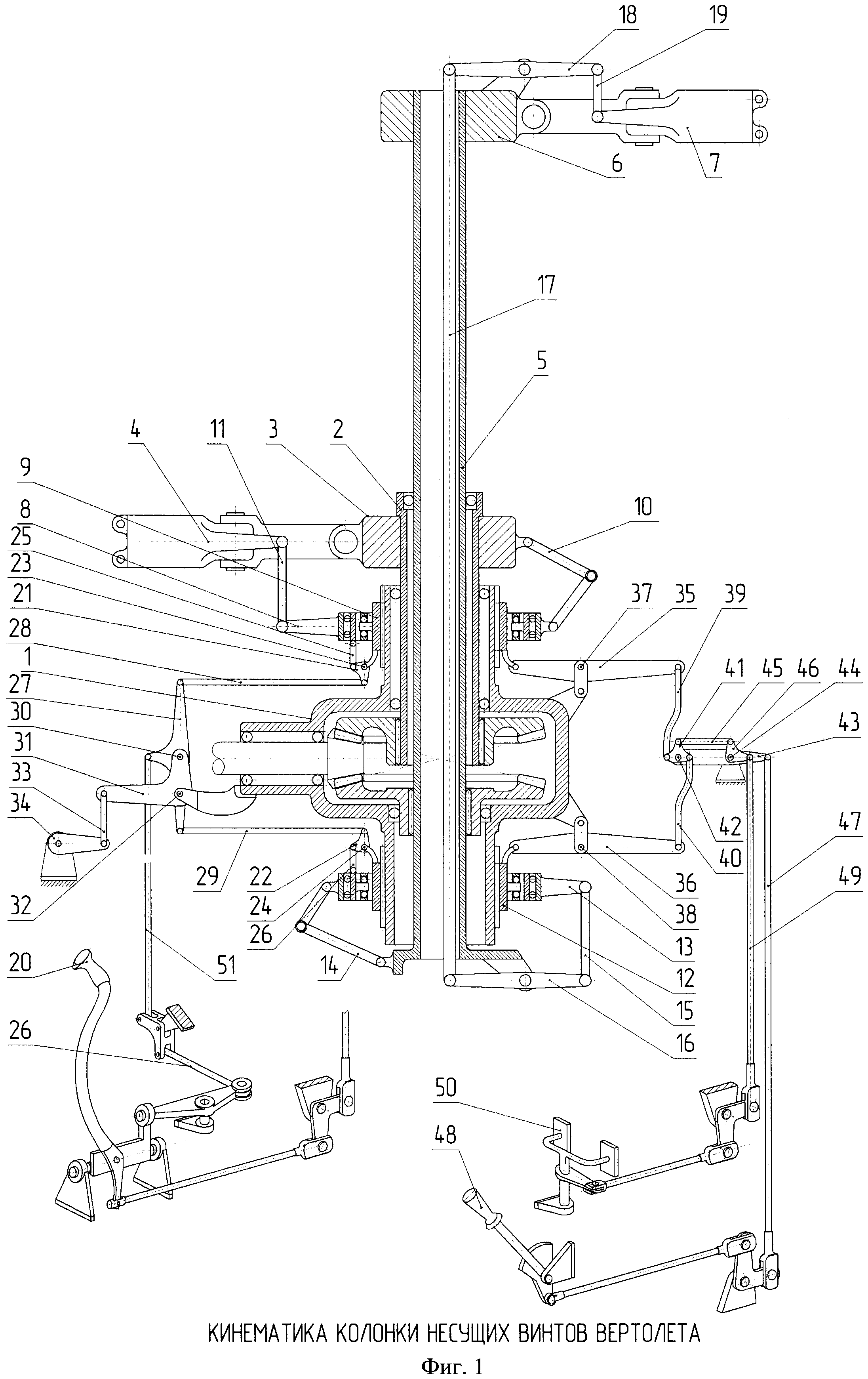
На чертеже (Фиг. 1) изображен общий вид предложенной системы двух соосных несущих винтов летательного аппарата, причем цепь продольного управления, ввиду ее идентичности с поперечным управлением, для упрощения чертежа условно не показана.
В редукторе 1 на подшипниковых опорах установлен полый вал 2, на котором сверху закреплена втулка 3 нижнего несущего винта с осевыми шарнирами 4 лопастей нижнего несущего винта. На валу 2 закреплено колесо с зубчатым коническим зацеплением, которое связано с конической шестерней редуктора. Внутри вала 2 на подшипниковых опорах установлен полый вал 5, на котором сверху закреплена втулка 6 верхнего несущего винта с осевыми шарнирами 7. На валу 5 закреплено колесо с зубчатым коническим зацеплением связанное с конической шестерней редуктора. На верхней части корпуса редуктора, на ползушке 9, установлен автомат перекоса 8 нижнего несущего винта с возможностью его осевого перемещения, наружное кольцо автомата перекоса соединено шлиц-шарниром 10 с втулкой 3 нижнего несущего винта и связано тягами 11 с осевыми шарнирами 4 лопастей втулки нижнего несущего винта. На нижней части корпуса редуктора, на ползушке 12 с возможностью осевого перемещения установлен автомат перекоса 13 верхнего несущего винта, наружное кольцо которого соединено шлиц-шарниром 14 с валом 5, наружное кольцо тягами 15 через качалки 16 и далее тяги 17, проведенные внутри вала 5, через качалки 18 и тяги 19 связано с осевыми шарнирами 7 лопастей втулки верхнего несущего винта.
Внутренние кольца (кольца управления) автоматов перекоса нижнего и верхнего несущих винтов связаны с ручкой управления циклическим шагом 20, в канале поперечного управления качалками 21, 22, на осях 23, 24, тягами 25, 26, трехплечей качалкой 27, тягами 28, 29 и тягой 51; в канале продольного управления аналогичными качалками и тягами (на фиг. 1 канал продольного управления условно не показан).
Внутренние кольца автоматов перекоса верхнего и нижнего несущих винтов также связаны и с механизмом дифференциального управления циклическим шагом - в канале поперечного управления - посредством трехплечей качалки 27, закрепленной своей осью 30 на верхнем плече двуплечей качалки 31 механизма дифференциального управления циклическим шагом, которая в свою очередь закреплена на оси 32 неподвижной опоры и вторым своим плечом связана тягой 33 с исполнительным механизмом 34 (или ручным приводом).
В канале продольного управления кинематическая связь автоматов перекоса с механизмом дифференциального управления циклическим шагом аналогичная, поэтому на чертеже условно не показана.
Ползушки, 12 - автомата перекоса нижнего несущего винта и 9 - автомата перекоса верхнего несущего винта, подвижные в осевом направлении на направляющих верхнего и нижнего корпусов редуктора связаны при помощи рычагов 35, 36 на оси 37, 38 и тяг 39, 40 с трехплечей качалкой 41 рычажного параллелограммно-суммирующего механизма управляющего общим и дифференциальным шагом обоих несущих винтов. Трехплечая качалка 41 своей осью 42 закреплена на рычаге 43, который в свою очередь своей осью 44 закреплен на неподвижной опоре. Трехплечая качалка 41 тягой 45 связана с двуплечей качалкой 46, которая закреплена на оси 44. Рычаг 43 тягой 47 связан с рычагом «шаг-газ» 48 управления общего шага несущих винтов. Двуплечая качалка 46 тягой 49 связана с педалями 50 путевого управления.
Предлагаемая система двух соосных несущих винтов работает следующим образом.
Ведущая коническая шестерня редуктора, вращаемая двигателем, вращает связанные с ней конические зубчатые колеса в противоположных направлениях. Соосные валы редуктора, связанные с коническими зубчатыми колесами, также вращаются в противоположных направлениях и вращают в противоположных направлениях закрепленные на них втулки верхнего и нижнего несущих винтов.
Общий шаг несущих винтов изменяется перемещением рычага «шаг-газ» 48, при этом тяга 47 перемещаясь, поворачивает рычаг 43 на оси 44, перемещая этим трехплечую качалку 41 параллелограммно-суммирующего механизма параллельно самой себе, соответственно тяги 39 и 40 переместятся обе в одну сторону и на одинаковую величину. Тяги 39 и 40 перемещаясь поворачивают рычаги 35 и 36 соответственно на осях 37 и 38, перемещая этим автоматы перекоса 13, 8 - нижнего и верхнего несущих винтов по направляющим верхнего и нижнего корпусов редуктора в осевом направлении в одну и ту же сторону на одинаковую величину. Перемещение автомата перекоса 8 (например, вверх) через тягу 11 поводок осевого шарнира 4 вызовет изменение (увеличение) общего шага нижнего несущего винта. Перемещение автомата перекоса 13 (так же вверх) через тягу 15 качалку 16 тягу 17 качалку 18 тягу 19 поводок осевого шарнира 7 вызовет изменение (так же увеличение) общего шага верхнего несущего винта соответствующее изменению общего шага нижнего винта.
Изменение дифференциального шага вызывается перемещением педалей 50 (например, «дана правая нога»), при этом тяга 49 перемещаясь (поднимаясь), поворачивает на оси 44 двуплечую качалку 46 (против часовой стрелки) и через тягу 45 поворачивает на оси 42 трехплечую качалку 41 параллелограммно-суммирующего механизма (так же против часовой стрелки). Трехплечая качалка 41 поворачиваясь на оси, перемещает тяги 39 и 40 в противоположных направлениях (40 вверх, 39 вниз) на одинаковую величину - так как эти плечи у качалки 41 одинаковые. Перемещение тяг 39, 40 вызывает поворот рычагов 35 и 36 на осях 37 и 38 соответственно, перемещая этим автоматы перекоса в противоположных направлениях 8 (вверх) и 13 (вниз) на одинаковую величину. Перемещение автомата перекоса 8 через тягу 11 поводок осевого шарнира 4 вызовет изменение (увеличение) общего шага нижнего несущего винта, перемещение же автомата перекоса 13 в противоположном направлении (вниз) через тягу 15, качалку 16, тягу 17, качалку 18, тягу 19, поводок осевого шарнира 7, вызовет изменение общего шага верхнего несущего винта в направлении противоположном по отношению к изменению общего шага нижнего винта (т.е. вызовет уменьшение шага). Неуравновешенный реактивный момент несущих винтов будет поворачивать вертолет в сторону противоположную вращению более загруженного винта, т.е. вправо (учитывая, что в рассматриваемом варианте верхний винт вращается по часовой стрелке при виде на вертолет сверху).
Изменение циклического шага вызывается наклонами ручки управления 20 в продольном или поперечном направлениях. Наклон ручки 20 в поперечном направлении (например, вправо) вызовет перемещение тяги 51 (вверх), что в свою очередь вызовет поворот (по часовой стрелке) трехплечей качалки 27 на оси 30. Поворот трехплечей качалки 27 через тягу 28 вызовет поворот (против часовой стрелки) качалки 21. Качалка 21 поворачиваясь на своей оси 23 через тягу 25 связанную с кольцом управления автомата перекоса вызовет наклон автомата перекоса 8 в сторону отклонения ручки 20. Поворот качалки 27 через тягу 29 вызовет поворот (по часовой стрелке) качалки 22. Качалка 22 поворачиваясь на своей оси 24 через тягу 26 связанную с кольцом управления автомата перекоса вызовет наклон автомата перекоса 13 также в сторону отклонения ручки 20. Наклон в одну сторону на одинаковую величину обоих автоматов перекоса вызовет на связанных с ними осевых шарнирах циклическое изменение шага лопастей верхнего и нижнего несущих винтов, что вызовет наклон равнодействующей аэродинамической силы и соответственно наклон вертолета в сторону наклона ручки управления.
При поступательном полете вертолета возникает так называемое «косое» обтекание воздушным потоком несущих винтов, что приводит к боковым завалам конусов несущих винтов в диаметрально противоположных направлениях. При поступлении сигнала с датчиков о величине и азимуте начала сближения концов лопастей верхнего и нижнего несущих винтов, исполнительные механизмы дифференциального управления циклическим шагом несущих винтов, в каналах поперечного и продольного управлений, поворачивает двуплечие качалки 31 на оси 32 на углы, соответствующие поступившему сигналу (на фиг.1 ввиду идентичности показано дифференциальное управление циклическим шагом лопастей несущих винтов только в канале поперечного управления). При повороте двуплечей качалки 31 на оси 32 трехплечая качалка 27 вместе с тягами 25, 26 перемещается вправо или влево при этом связанные с тягами качалки 21, 22 поворачиваясь в противоположных направлениях, наклоняют автоматы перекоса 8 и 13 на одинаковые углы, но в разных направлениях. Соответственно, несущие винты верхний и нижний, получив каждый от своего автомата перекоса корректирующее управляющее воздействие на связанные с ними осевые шарниры, дифференциально изменят управление циклическим шагом и тем самым устранятся завалы конусов и восстановится первоначальное расстояние между концами лопастей верхнего и нижнего несущих винтов.
Система двух соосных несущих винтов вертолета, содержащая редуктор с двумя соосными валами, вращающимися в противоположных направлениях, на которых закреплены втулки несущих винтов, содержащая также цепи управления каждым из несущих винтов, включающие два автомата перекоса, кинематически связанные с поводками лопастей верхнего и нижнего несущих винтов, отличающаяся тем, что, с целью исключения сближения и исключения возможного схлестывания концов лопастей верхнего и нижнего несущих винтов в полете, вращающиеся кольца автоматов перекоса нижнего и верхнего несущих винтов выполнены не связанными между собой, при этом автоматы перекоса верхнего и нижнего несущих винтов в цепях управления общим и дифференциальным шагом лопастей выполнены с возможностью осевого перемещения и кинематически связаны между собой посредством параллелограммно-суммирующего механизма, а в цепях продольного и поперечного управлений автоматами перекоса верхнего и нижнего несущих винтов применен механизм дифференциального управления циклическим шагом, чем обеспечивается одинаковое расстояние на всех азимутах между концами лопастей верхнего и нижнего несущих винтов при поступательном полете вертолета, что позволяет уменьшить расстояние между винтами и увеличить максимальную скорость полета вертолета.