Результат интеллектуальной деятельности: ТРУБОГИБОЧНЫЙ СТАНОК
Вид РИД
Изобретение
Изобретение относится к области обработки металлов давлением и может быть использовано для гибки труб по схеме наматывания на шаблон.
В серийном производстве гибка труб осуществляется, как правило, на специальном оборудовании - трубогибочных станках автоматического или полуавтоматического типа. Как правило, трубогибочные станки включают станину, устройство для закрепления и подачи заготовки в зону гибки, гибочное устройство и систему управления. Придание заготовке заданной пространственной формы происходит по командам системы управления согласованными срабатываниями устройства для закрепления и подачи заготовки в зону гибки и гибочного устройства.
Устройство для закрепления и подачи заготовки в зону гибки обеспечивает поступательное перемещение и, при необходимости, разворот заготовки. Необходимость обеспечения размеров изогнутой трубы в пределах заданных допусков требует точного отслеживания положения исполнительных устройств в каждый момент выполнения операции. Обычно это достигается применением на станках следящих систем с линейными датчиками обратной связи, например, в виде координатных оптических или магнитных линеек, имеющих высокую стоимость. К особенностям линейных датчиков обратной связи относится так же зависимость их размеров и, соответственно, стоимости от габаритных размеров заготовки: чем длиннее заготовка - прямая труба, устанавливаемая на станок - тем больше должна быть линейка и тем дороже он становится.
Гибочное устройство выполняет сгибание заготовки на заданный угол. Система управления оперирует, как минимум, с тремя характерными параметрами: линейным перемещением, углом поворота плоскости гиба и углом гиба.
Известны трубогибочные станки серии TBRE-MRE производства компании CSM, включающие (URL: http://www.tubebender.ru/products/item/9/7/ (Дата обращения: 15.05.2019)). В процессе гибки устройство для закрепления и подачи заготовки в зону гибки принудительно поступательно перемещается из исходного положения в направлении к гибочному устройству. Принудительное поступательное движение устройства для закрепления и подачи заготовки в зону гибки обеспечивается специальным ползуном с гидравлическим приводом, действующим по командам системы управления. Переналадка станка для изготовления трубы, имеющей отличную пространственную форму, состоит во введении в систему управления новой программы через сенсорный экран для программирования.
К недостаткам известных трубогибочных станков относятся наличие в конструкции гидравлической системы и связанное с этим усложнение системы управления, а также необходимость ручного введения при переналадке станка всех координат будущих гибов, как линейных, так и угловых, что подразумевает существенные затраты времени.
Известен способ гибки труб и станок для осуществления способа, предусматривающие выполнение устройства для закрепления и подачи заготовки в зону гибки в виде цангового зажима с возможностью осевого возвратно-поступательного перемещения по направляющим станины, (пат. RU 2422229, опубл. 27.06.2011. Бюл. №18). Гибочное устройство, по известному решению, включает гидроцилиндры, в которых величина выдвижения штоков определяется командами системы управления. По командам системы управления происходят поступательное перемещение устройства закрепления и подачи заготовки в зону гибки и одновременное срабатывание гибочного устройства.
К недостаткам известного способа и станка для его осуществления относится неоправданная сложность схемы работы, обусловленная выполнением линейных и угловых перемещений заготовки управляемыми гидроцилиндрами, для каждого из которых необходимо предварительное задание величины выдвижения штока. Недостатком является так же наличие в конструкции станка гидростанции, необходимой для работы гидроцилиндров. Переналадка станка в известном решении происходит в автоматическом режиме, что также усложняет систему управления и, в конечном счете, удорожает изготовление изделий.
Известно устройство для гибки труб (пат. RU 2434703, опубл. 27.11.2011. Бюл. №33), устанавливаемое на станину трубогибочного станка и включающее устройство для закрепления и подачи заготовки в зону гибки и гибочное устройство. Управление устройством для гибки труб обеспечивается системой управления с ЧПУ станка. Устройство для закрепления и подачи заготовки в зону гибки выполнено в виде цангового зажима, гибочное устройство оснащено планшайбой, установленной на полый вал с возможностью поворота. Гибочный элемент представляет собой ролик, размещенный на коромысле, имеющем возможность поворота. После установки на станок заготовка фиксируется в устройстве для закрепления и подачи для исключения возможности ее осевого вращения и продольного перемещения. После этого она подается в зону гибки по каналу внутри вала. Для уменьшения контактного трения в стенки канала в известном устройстве установлены шарики. Перемещение заготовки и гибка осуществляются при помощи гидроцилиндров.
К недостаткам известного решения относится сложность конструкции, обусловленная применением гидроцилиндров, для которых необходимо наличие гидростанции, и наличие протяженного канала, по которому заготовка подается в зону гиба. Применение в конструкции шариков для уменьшения контактного трения усложняет конструкцию. В то же время конструкция планшайбы не позволяет сократить длину вала и определяет линейный размер, меньше которого заготовка иметь не может. Это ограничивает габаритные размеры будущего изделия. Линейные координаты гибов обеспечиваются работой гидроцилиндров, что весьма сложно и имеет ограничения по точности. Переналадка станка в известном решении происходит в автоматическом режиме, что также усложняет систему управления и, в конечном счете, удорожает изготовление изделий.
Известна конструкция станков, в которых система управления обеспечивает фиксированные дискретные заданные движения рабочего органа, создавая определенные положения составных частей конечного изделия в пространстве. Примером таких составных частей могут служить нити определенного цвета в ткани, примером рабочего органа - челнок, примером оборудования - станки Жаккарда, а примером управляющего элемента - перфокарта или перфолента (URL: https://ru.wikipedia.org/wiki/Жаккардовый_тарцкий_станок (Дата обращения: 17.05.2019)).
К недостаткам известных конструкций относится, в частности, неизменяемость -перфокарту, практически, невозможно изменить - и дискретность регулировок - одной перфокарте соответствует один прокид челнока в ткацком станке.
Наиболее близким по совокупности существенных признаков - прототипом заявляемого изобретения - является машина для гибки труб (пат. RU №20267, опубл. 27.10.2001. Бюл. №30). Известная конструкция включает устройство для закрепления и подачи заготовки в зону гибки, называемое авторами решения задней бабкой и установленное на балке станка, устройство-переключатель значений углов гибов заготовки с регулировочными упорами, обеспечивающими фиксацию ряда заданных значений углов гибов заготовки, и систему управления. Балка имеет фасонный профиль, разметочную шкалу для линейного выдвижения заготовки и снабжена набором регулируемых упоров-фиксаторов ряда линейных выдвижений заготовки с замками. Привод выполнен в виде пневматической системы, обеспечивающей автоматическое выполнение ряда рабочих операций. Фиксация ряда заданных значений обеспечивается фасонным профилем балки и набором необходимого количества регулируемых упоров-фиксаторов, размещенных вдоль балки и имеющих замки, управляемые пневмосистемой, а фиксация поворотов плоскости гиба заготовки в пространстве на заданные углы обеспечивается зажатием трубы в задней бабке и фиксацией заданных пространственных углов замком стопоров на задней бабке. Фиксаторы углов гиба трубы, линейного перемещения (выдвижения) трубы и поворота плоскости гиба - трех характерных координат, определяющих пространственную форму трубы - устанавливаются вручную перед началом гибки. После установки и закрепления заготовки в устройстве для закрепления и подачи заготовки в зону гибка, оно вручную перемещается до упора фиксатора первого гиба и устанавливается в нужной плоскости. Устройство-переключатель устанавливается в положение первого гиба. Последующие операции выполняются автоматически по командам оператора с панели органов управления.
К недостаткам известного решения относятся применение пневмосистемы, требующей наличия источника сжатого воздуха и дискретность возможного диапазона углов поворота плоскостей гиба, обусловленная конструкцией револьверного устройства-переключателя. Недостатком является большой объем работ при переналадке машины на новое изделие: требуется замена устройства-переключателя значений углов гибов заготовки с регулировочными упорами и переустановка упоров-фиксаторов на балке. Может потребоваться изменение количества упоров-фиксаторов (при изменении количества гибов на новом изделии, по сравнению с предыдущим).
Технической задачей, на решение которой направлено предлагаемое изобретение, является устранение недостатков прототипа - упрощение конструкции трубогибочного станка и сокращение продолжительности переналадки при переходе на изготовление изделия, отличающегося пространственной формой гибки.
Поставленная задача решается за счет того, что в устройстве для закрепления и подачи заготовки в зону гиба введен упругий элемент, а одна из задаваемых координат - линейное перемещение заготвоки - определяется расположением датчиков положения на сменном элементе трубогибочного станка, установочной штанге, и может быть установлена без затрат операционного времени.
Новизной в предложенном трубогибочном станке является:
- конструкция устройства для закрепления и подачи, включающая упругий элемент, и совмещенная с устройством для поворота заготовки в нужную плоскость гиба;
- применение в системе управления сменной штанги с установленными в определенном порядке датчиками положения вместо линейных датчиков обратной связи.
Указанные признаки являются новыми, существенными, неочевидными и промышленно выполнимыми и направлены на решение поставленной изобретением технической задачи.
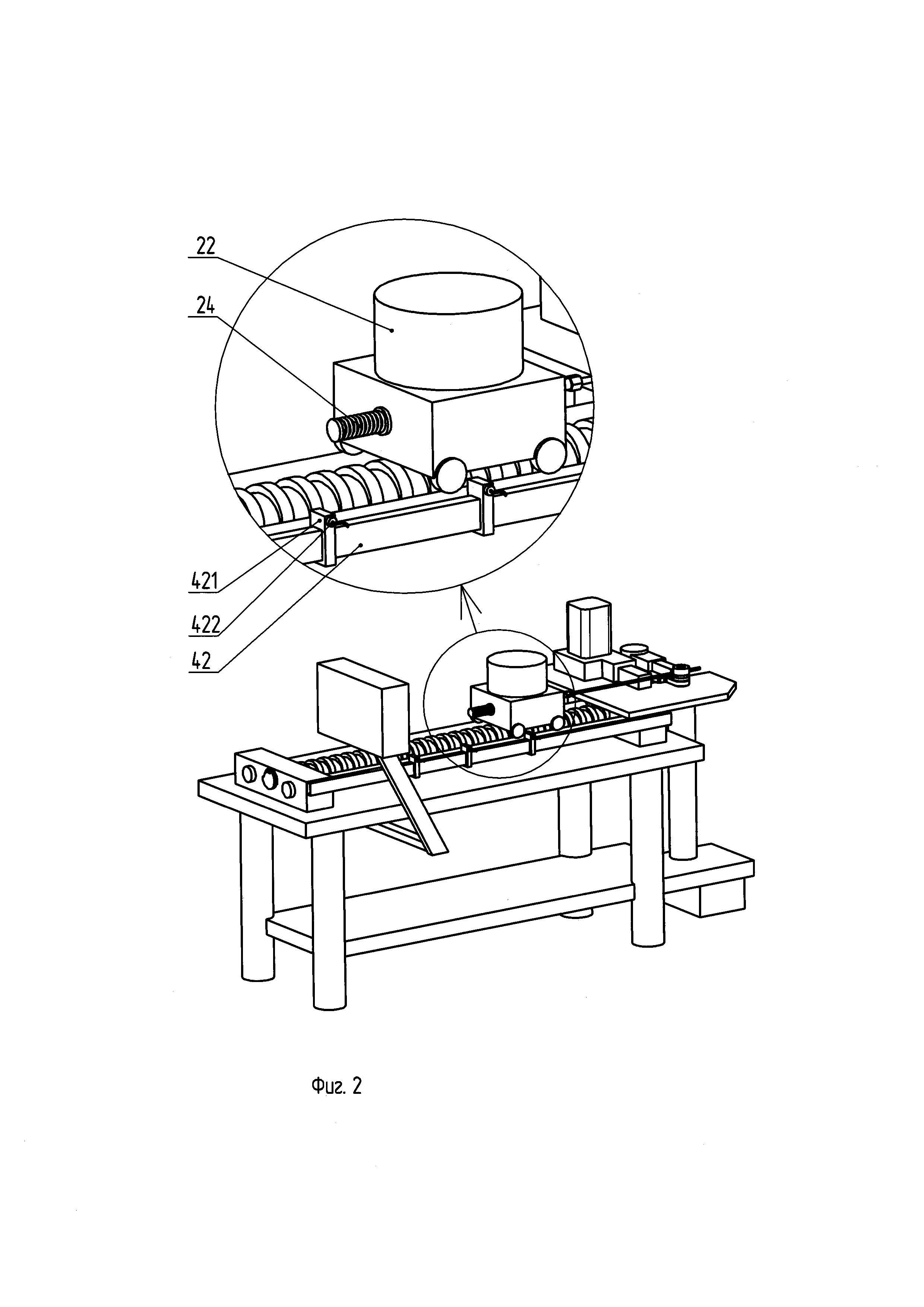
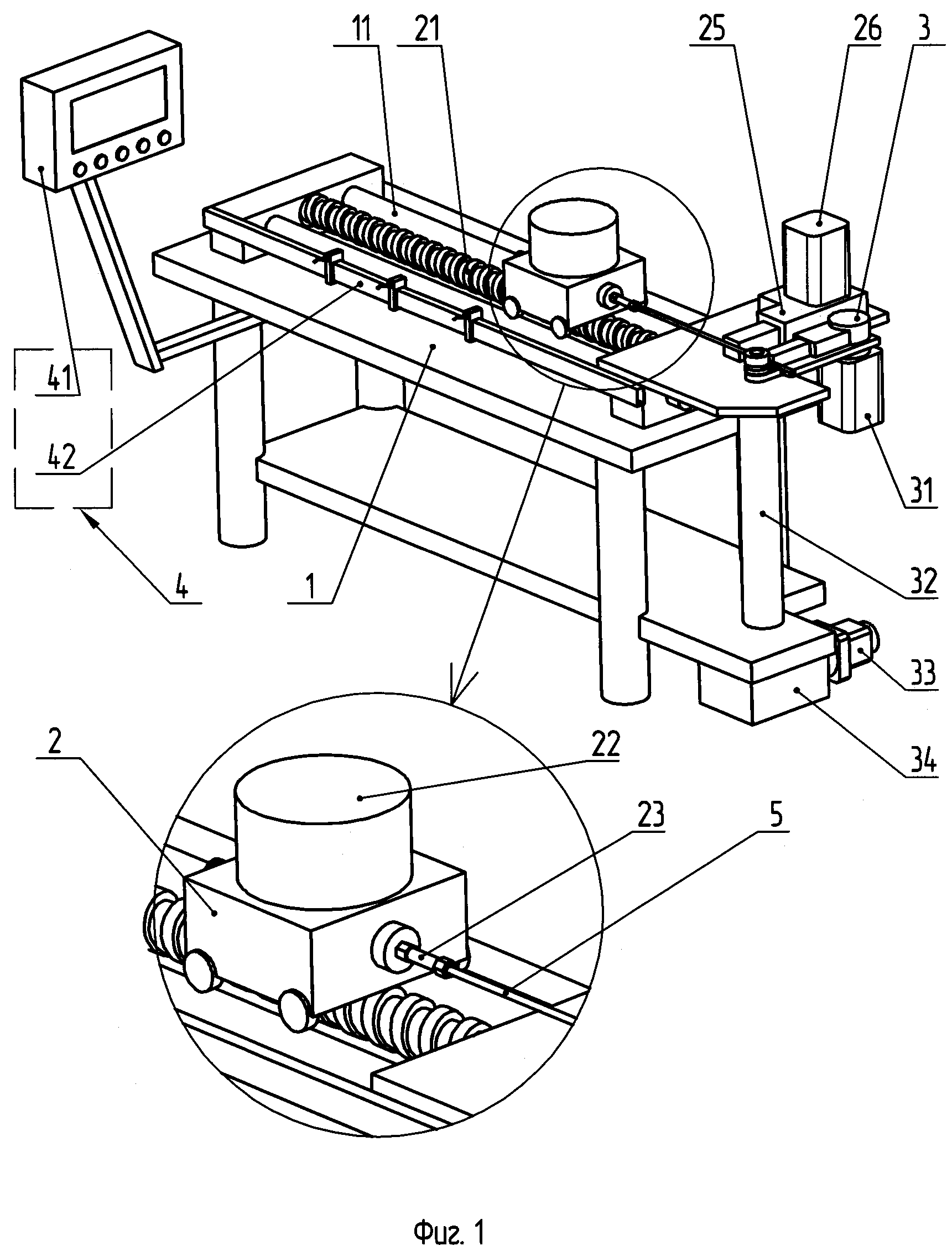
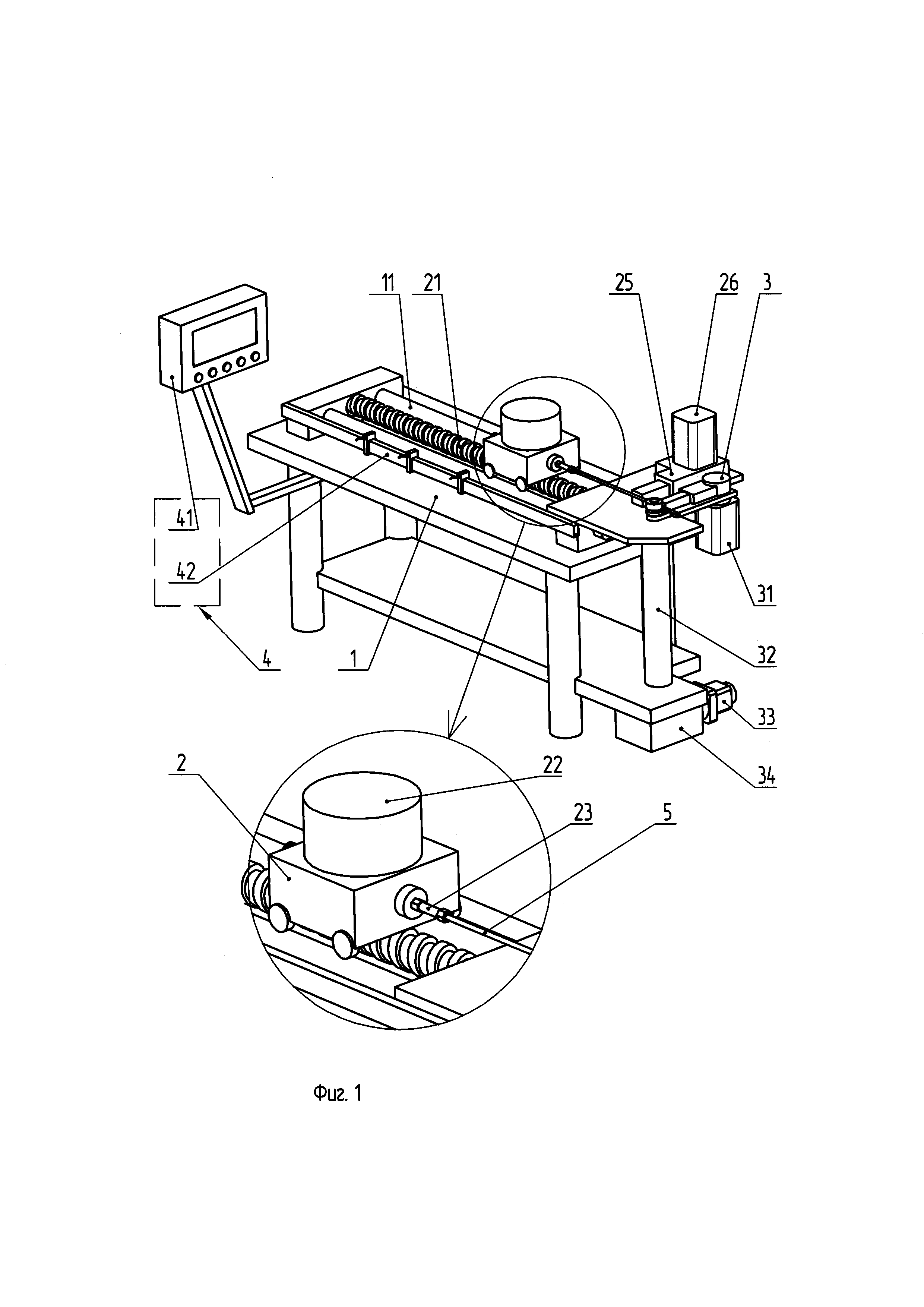
Предлагаемый в качестве изобретения трубогибочный станок поясняется чертежами (фиг. 1, 2, 3) и включает станину 1, устройство 2 для закрепления и подачи заготовки в зону гиба, гибочное устройство 3, систему управления 4. Основными компонентами системы управления 4 (фиг. 1) являются пульт управления 41, сменная штанга 42 и жгуты соединяющих проводов (на фиг. не показаны). Сменная штанга 42 устанавливается и закрепляется на станине 1 любым известным способом таким образом, что ее линейная координата - смещение вдоль продольной оси -выдерживается с жестким допуском. Обеспечение указанного требования производится любым известным способом и не является предметом патентной охраны. На сменной штанге 42 в кронштейнах 421 размещены датчики положения 422, количество и расположение которых соответствует необходимому количеству и расположению гибов.
На станине 1 размещены направляющие 11, по которым посредством привода 21 перемещается устройство 2 для закрепления и подачи заготовки в зону гиба. Привод 21 может быть выполнен любым известным способом, например, зубчатым ремнем или шарико-винтовой парой и не является предметом патентной охраны. Устройство 2 для закрепления и подачи заготовки в зону гиба включает сервопривод 22 и штангу 23. Штанга 23 установлена в корпусе устройства 2 для закрепления и подачи заготовки в зону гиба параллельно направлению движения устройства 2 для закрепления и подачи заготовки в зону гиба и выступает из него с двух сторон. На конце штанги 23, ближнем к гибочному устройству 3, выполнена наружная резьба. На противоположном конце штанги 23 установлен упругий элемент 24 (фиг. 2). Штанга 23 связана с сервоприводом 22 таким образом, что имеет возможность осевого вращения, которое сообщает ей сервопривод 22, и продольного перемещения.
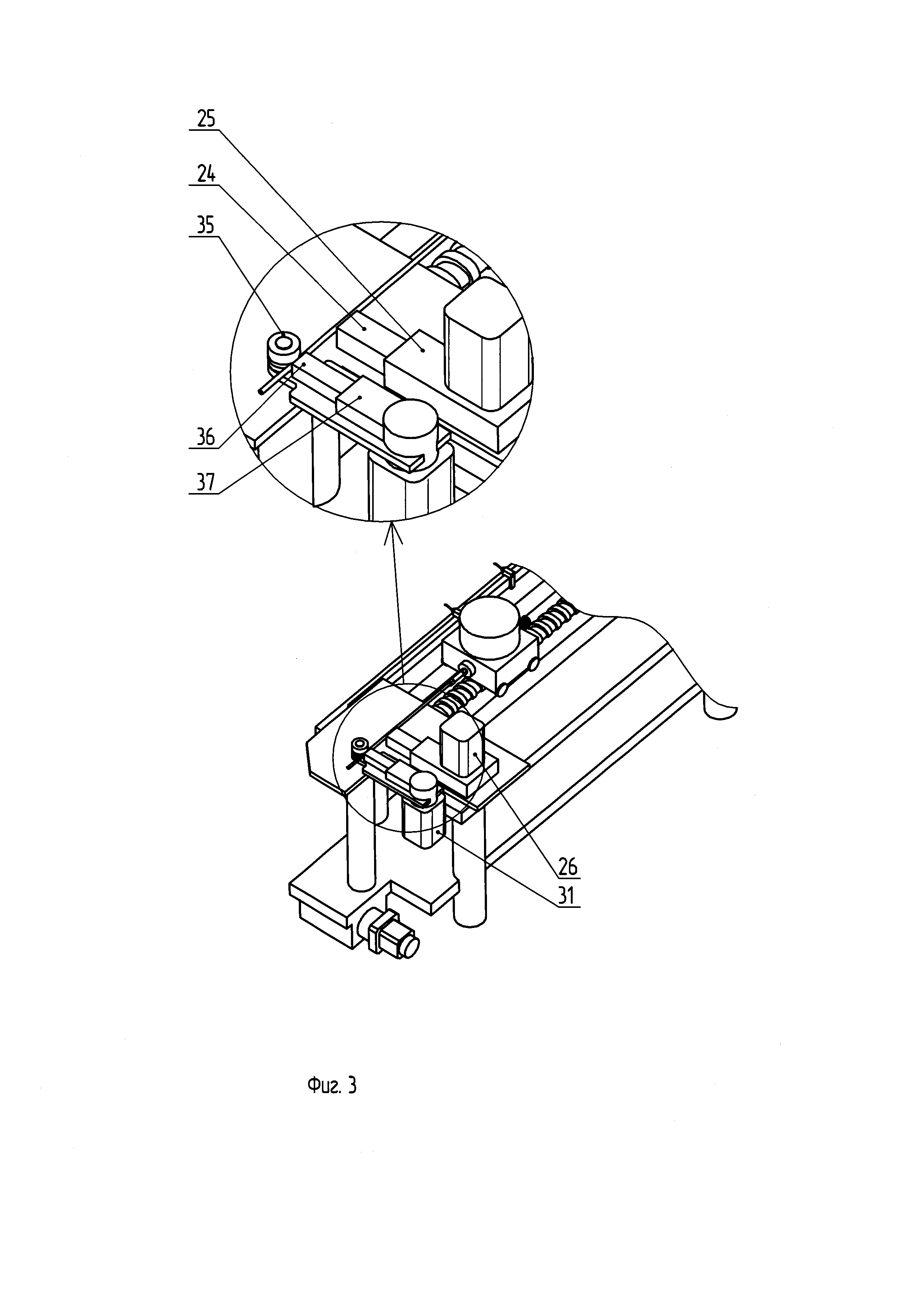
Гибочное устройство 3 расположено на станине 1 с возможностью осевого вращения и связано валом 32 через редуктор 34 с двигателем 33. Гибочное устройство 3 включает оправку 35, жестко связанную с валом 32, и подвижный упор 36, установленный с возможностью его перемещения приводом 31 в направляющей 37 для прижатия заготовки 5 к оправке 35.
Трубогибочный станок работает следующим образом.
Предварительно на сменной штанге 42 устанавливают кронштейны 421 с датчиками положения 422, размещая их в соответствии с количеством и расположением гибов на будущем изделии. Провода от датчиков формируют в общий жгут соединяющих проводов. Собранную сменную штангу 42 устанавливают и закрепляют на станине 1. Жгут соединяющих проводов (на фиг. не показан) подключают к пульту управления 41 известным способом, например, через разъем (на фиг. не показан). С пульта управления 41 вводят угловые координаты поворота вала 32.
Заготовку 5 (фиг. 1), имеющую сформированные на концах соединительные головки и накидные гайки, устанавливают на штангу 23 со стороны, обращенной к гибочному устройству 3. Накидную гайку заготовки 5 затягивают на резьбовой части конца штанги 23.
После включения оператором процесса гиба с пульта управления 41 все переходы выполняются в автоматическом режиме. Устройство 2 для закрепления и подачи заготовки в зону гиба перемещается сервоприводом 21 до первого датчика положения 422, что соответствует положению первого гиба, и останавливается. Приводы 26 и 31 перемещают упоры 24 и 36 в направляющих 25 и 37, соответственно, прижимая заготовку 5 к оправке 35. После прижатия заготовки 5 к оправке 35 включается двигатель 33, который через редуктор 34 и вал 32 поворачивает оправку 35 с прижатой к нему заготовкой 5 на заданный угол.
Гибка заготовки 5 происходит по схеме наматывания на оправку 35. Поэтому при изгибе заготовки 5 требуется ее дополнительная подача на величину, зависящую от угла гиба и определяемую по известной формуле с учетом пружинения заготовки 5. Эта подача происходит при осевом перемещении штанги 23 относительно зафиксированного устройства 2 для закрепления и подачи заготовки в зону гиба при одновременной деформации упругого элемента 24. Максимальная возможная деформация упругого элемента 24 предварительно подбирается так, чтобы иметь гарантированный запас по подаче заготовки 5 при заданном радиусе и максимальном угле гиба.
Двигатель 33 останавливается при достижении заданного угла поворота оправки 35 с прижатой к ней заготовкой 5. Подвижные упоры 24 и 36 отводятся приводами 26 и 31, освобождая заготовку 5 для последующего перемещения. Устройство 2 для закрепления и подачи заготовки в зону гиба перемещается до следующего датчика положения 422 и останавливается. При перемещении устройства 2 для закрепления и подачи заготовки в зону гиба упругий элемент 24 возвращает штангу 23 в исходное положение относительно устройства 2 для закрепления и подачи заготовки в зону гиба.
Линейная координата - положение датчика положения 422 на сменной штанге 42 - предварительно рассчитана так, чтобы к моменту остановки устройства 2 для закрепления и подачи около датчика положения 422 штанга 23 вернулась в исходное положение, а деформация упругого элемента 24, накопленная за предшествующее перемещение устройства 2 для закрепления и подачи, обнулилась. Сервопривод 22 поворачивает заготовку 5 вокруг оси на нужный угол, изменяя положение плоскости гиба. После этого гибка продолжится в автоматическом режиме до прохождения всех датчиков положения 422 на сменной штанге 42.
Применение упругого элемента 24 позволяет упростить систему управления трубогибочным станком и удешевить его конструкцию за счет исключения координатных оптических или иных линеек. В качестве упругого элемента 24 может быть применена цилиндрическая пружина сжатия, причем, с учетом специфики работы, требования к точности ее изготовления будут невысокие.
При необходимости изготовления на предлагаемом трубогибочном станке изделия (трубы), отличающегося пространственной формой и размерами, необходимо заменить сменную штангу 42 с установленными датчиками положения 422 и ввести новые координаты на пульте управления 41.
Техническим результатом предлагаемого изобретения является: упрощение и удешевление конструкции трубогибочного станка за счет замены линейных датчиков обратной связи датчиками положения, установленными на сменной штанге в соответствии с количеством и расположением гибов в конечном изделии, а также сокращение вспомогательного времени - времени на переналадку трубогибочного станка при подготовке к изготовлению нового изделия. Сокращение вспомогательного времени происходит за счет перераспределения работ по наладке: заблаговременной подготовки сменной штанги с установленными датчиками положения таким образом, что при переналадке станка требуется простая замена сменных штанг, которая может быть выполнена без привлечения высококвалифицированного наладчика.
Предлагаемая конструкция трубогибочного станка прошла испытания и внедрена в серийное производство на Алтайском заводе прецизионных изделий.
Способ испытания электрогидравлической форсунки
Способ гидравлического испытания компонентов систем common rail
Способ испытания электрогидравлической форсунки
Способ гидравлического испытания компонентов систем common rail

