Результат интеллектуальной деятельности: Способ поездного сигнализирования и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к автоматике и телемеханике рельсового транспорта, включая железнодорожный, а именно к приемной аппаратуре автоматической поездной сигнализации (АПС) подвижного состава, предназначенной преимущественно для определения сигналов впереди стоящих светофоров, состояния стрелок и иных путевых устройств или указания расстояния между поездами.
АПС информирует машиниста о состоянии пути впереди поезда, задействует скоростную авторегулировку и автоконтроль, приводит при необходимости в действие поездной автостоп для принудительного торможения состава. Основными частями широко применяемых железнодорожных АПС являются: кодовый путевой трансмиттер, производящий периодические перерывы или модуляцию электрического тока, соответствующие сигналу светофора; взаимодействующие друг с другом через рельсовую цепь и индуктивную связь путевой передатчик и локомотивный приемник в виде катушек с железными сердечниками, укрепленных на локомотиве над рельсами; локомотивный усилитель; аналоговый фильтр с переключателем принятых в России частот сигнала путевых и иных устройств; локомотивный дешифратор, расшифровывающий передаваемые с пути сигналы; локомотивный светофор и устройства, автоматически снижающие скорость поезда до соответствующей показаниям путевого или локомотивного светофора величины, а также останавливающие поезд, если машинист самостоятельно не начинает торможение в случаях, требующих снижения скорости и остановки состава. Распространенные на метрополитене и других видах рельсового транспорта АПС имеют в целом сходную конструкцию и принцип работы, а их отличия зависят от способа кодирования электрических сигналов.
При эксплуатации АПС локомотивный приемник вместе с кодовым сигналом подвергается воздействию разнообразных помех, что на практике приводит к многочисленным в масштабе страны сбоям в работе системы в виде ошибок интерпретации принимаемого сигнала, из-за которых возможен, в частности, пропуск посылок кодовых сигналов, создающий опасность возникновения аварийных ситуаций, или случайное включение автостопа, и как следствие нарушение графика движения поездов, перерасход дизельного топлива или электроэнергии, повышенный износ элементов конструкции пути и подвижного состава. Устойчивость связи с локомотивом в значительной степени способны снизить внешние помехи различной природы, уровень которых намного превышает амплитуду полезного сигнала АПС. В основном данные помехи обусловлены следующими факторами: локальной остаточной намагниченностью рельсов и стрелок, вызывающей импульсные электрические сигналы в приемных катушках АПС; изменениями протекающего через рельсы обратного тягового тока на участках с электротягой; воздействием линий продольного электроснабжения и близлежащих высоковольтных линий электропередач. Из-за низкой помехоустойчивости применяемых АПС к перечисленным помехам, так же как и к помехам иных видов на входе локомотивного устройства, не всегда обеспечивается верность приема кодовых сообщений, что не позволяет признать такие системы достаточно надежными.
Для повышения помехоустойчивости АПС ранее был предложен ряд технических решений.
Из патентного документа RU 2517631 С2 от 27.05.2014 известно приемное устройство АПС, осуществляющее способ приема ее сигнала. Устройство включает в себя две катушки с секционированной намоткой соленоида для сдвига резонансной частоты приемного тракта в область, где помехи от тягового тока менее выражены. При этом величины индуктивности и емкости катушек, емкости соединительного кабеля, через который указанные катушки подключены к локомотивному приемнику, и входной емкости локомотивного приемника выбраны из условия обеспечения резонанса приемного тракта на несущей частоте сигнала АПС. В процессе работы обратный тяговый ток и ток АПС индуцируют в приемных катушках электрические сигналы, усиливаемые резонансным приемным трактом на нестандартной несущей частоте сигнала АПС, превышающей 3 кГц. Способ приема сигнала АПС с использованием известного приемного устройства не подходит для уже существующих систем с частотой сигнала путевых устройств 25, 75 или 50 Гц, позволяет отстроиться только от помехи тягового тока. Кроме того, при проезде над намагниченным участком рельса в соленоидах локомотивных катушек возникает ЭДС помехи, причем с ростом скорости движения состава увеличивается и амплитуда помехи. Также локомотивные катушки чувствительны к изменениям магнитного поля, вызванным включением тягового тока, из-за чего возникает всплеск помехи.
Согласно RU 158579 U1 от 10.01.2016 в устройстве АПС с компенсацией помех на входе приемника последовательно с катушками АПС включены две дополнительные компенсирующие катушки, ориентированные на отсутствие магнитной связи с рельсовыми нитями при симметрии их расположения к рельсовым нитям, а также на наличие магнитной связи при возникновении асимметрии тягового тока, боковой качке локомотива и воздействии остаточной намагниченности. Устранить влияние дестабилизирующих факторов предполагается путем вычитания ЭДС помех, наведенных в дополнительных катушках из разницы ЭДС помех, наведенных в типовых катушках АПС. Так как все указанные величины пропорциональны асимметрии магнитного поля, то при подборе параметров катушек помеха на входе приемника уменьшается. Однако практически не представляется возможным придать компенсирующим катушкам такие характеристики, чтобы добиться подавления всего многообразия возможных помех.
Конструкция устройства по RU 2618616 С1 от 04.05.2017 содержит приемные катушки, фильтр нижних частот или режекторный фильтр, настроенный на частоту 50 Гц, амплитудный детектор, интегратор, блок задания порога ограничения, двухсторонний амплитудный ограничитель и локомотивный приемник. Устройство функционирует таким образом, что автоматически обеспечивается плавающий порог амплитудного ограничителя сигналов АПС при изменении их уровня в процессе движения локомотива. Данное устройство позволяет подавлять импульсные помехи на входе локомотивного приемника АПС, однако комплексная очистка кодового сигнала от флуктуационных и синусоидальных помех при этом не производится.
Из RU 94944 U1 от 10.06.2010 известен локомотивный приемник сигналов АПС для участков с электротягой переменного тока, содержащий локомотивные катушки, полосовые фильтры для пропускания сигналов с частотами 25 и 75 Гц, режекторный фильтр для подавления помех на частоте 50 Гц, интегратор, электронный ключ, автоматический переключатель, усилитель с авторегулировкой и дешифратор. При движении поезда по участку с несущей частотой тока АПС 25 Гц сигнал с выхода режекторного фильтра проходит к усилителю через полосовой фильтр 25 Гц. Если поезд находится в зоне с несущей частотой 75 Гц, то после срабатывания электронного ключа происходит коммутация автоматического переключателя, при которой на вход усилителя поступает сигнал с полосового фильтра 75 Гц, что практически полностью исключает мешающее влияние неравномерно намагниченных рельсов, создающих помехи меньшей частоты, на устойчивость работы АПС. Однако данное устройство способно повысить помехоустойчивость приемного устройства только по отношению к помехе одного вида и на одном частотном канале АПС. Известное устройство имеет сложную и громоздкую аналоговую схемотехнику конструкции, включающую в себя цепь коммутации и несколько фильтров, а типовые катушки для канала 25 Гц весят более 20 кг, т.к. для получения приемлемой чувствительности на данной частоте требуется большое число витков обмотки соленоида.
В качестве замены приемных катушек из RU 2653658 С1 от 11.05.2018 известно применение датчиков Холла аналогового типа, подключенных ко входам локомотивного приемника, связанного с локомотивным светофором через дешифратор. Датчики Холла расположены над рельсами перед передней осью локомотива с возможностью приема кодовых сигналов АПС от токов в рельсовых нитях и соединены последовательно таким образом, чтобы напряжения на входе приемника от полезного сигнала на выходе датчиков суммировались, а напряжения от помехи вычитались. Работа остальных узлов известного приемного устройства происходит в штатном режиме работы АПС. Недостатком известного устройства является получение разных сигналов АПС и разных сигналов помехи от тягового тока в случае несоблюдения условия одинаковости высоты подвеса датчиков Холла, из-за чего помехоустойчивость локомотивного устройства АПС будет снижена. У датчиков Холла чувствительность к намагниченным рельсам значительно ниже по сравнению со штатной приемной катушкой, однако известное устройство сохраняет чувствительность к тем помехам, которые не будут устранены вычитанием их сигналов с разных датчиков. Также известное устройство не способно обеспечить безотказность работы АПС из-за низкого соотношения сигнал/шум в приемном тракте такого локомотивного устройства, т.к. при слабых токах АПС невозможно выделить сигнал на датчике Холла из внутренних шумов данного датчика. Поездное устройство АПС по RU 2653658 С1, осуществляющее способ поездного сигнализирования, способ приема и первичной обработки сигнала АПС поездным устройством, а также способ распознавания кодового сигнала АПС на фоне аддитивных помех является наиболее близким аналогом настоящего изобретения среди других указанных технических решений.
В перечисленных известных устройствах не предусмотрена цифровая обработка сигналов, что усложняет их конструкцию, затрудняет точную настройку, не обеспечивает стабильность работы и практически не позволяет осуществить одновременное эффективное подавление всех возможных помех в измерительном сигнале, что делает невозможным доведение качества принятого сигнала до уровня, когда в измерительном сигнале полезный сигнал АПС устойчиво доминирует над помехами и его может уверенно опознать штатный дешифратор локомотивного устройства.
По указанным причинам помехоустойчивость известных локомотивных устройств АПС оказывается недостаточно высокой, а эксплуатационная надежность АПС остается низкой.
Решаемой технической проблемой является достижение высокой эксплуатационной надежности АПС, достаточной для безотказной работы данной системы в условиях зашумленности кодовых сигналов путевых устройств с заданной для нее достоверностью. Обеспечиваемый настоящим изобретением технический результат заключается в повышении помехоустойчивости локомотивного устройства АПС на фоне аддитивных помех, маскирующих кодовый сигнал, в широком диапазоне их амплитуд и в независимости от фаз помех.
Технический результат достигается благодаря тому, что способ поездного сигнализирования включает в себя передачу кодового сигнала от источника сообщения посредством рельсовой цепи, прием поездным устройством соответствующего аналогового сигнала, распознавание кодового сигнала на фоне аддитивных помех, дешифрацию кода и подачу управляющего воздействия на поездное средство индикации и/или автоматики, причем в случае успешного распознавания кодового сигнала генерируют вторичный кодовый сигнал с параметрами, выбранными из условия обеспечения однозначности дешифрации его кода, которую затем производят на основе указанного вторичного кодового сигнала.
В частном случае осуществления изобретения вторичному кодовому сигналу придают синусоидальную форму с такими частотой, амплитудой и фазой, что их величины равны значениям данных параметров сигнала на выходе источника сообщения.
В другом частном случае вторичный кодовый сигнал генерируют после проверки возможности декодирования сгенерированного сигнала.
Также технический результат достигается благодаря тому, что способ приема и первичной обработки сигнала АПС поездным устройством характеризуется тем, что в электромагнитное поле рельсовой цепи помещают однокоординатный безындукционный датчик магнитного поля, входящий в состав поездного устройства, ориентированный из условия преимущественной перпендикулярности оси координаты указанного датчика и продольной оси рельса, снимают и усиливают выходной электрический сигнал с чувствительного элемента датчика. Затем подавляют частоты измерительного сигнала вне рабочей полосы частот АПС. После чего преобразуют аналоговый измерительный сигнал в цифровой вид, обеспечивая при этом одновременную фиксацию минимально допустимого уровня амплитуды полезного сигнала и максимально допустимого уровня амплитуды аддитивной помехи.
В частном случае концентрируют магнитное поле в непосредственной близи от датчика.
В еще одном частном случае задают максимально допустимый уровень амплитуды аддитивной помехи из условия, что он в десять раз превышает минимально допустимый уровень амплитуды полезного сигнала.
Также в частном случае в электромагнитное поле рельсовой цепи помещают пару идентичных датчиков магнитного поля, ориентированных в противофазе по отношению к продольной оси рельса. При усилении выходные сигналы с чувствительных элементов данных датчиков суммируют.
В частном случае подавляют все частоты измерительного сигнала вне расширенной на 10% с каждой стороны рабочей полосы частот АПС.
Кроме того технический результат достигается благодаря тому, что в способе распознавания кодового сигнала АПС на фоне аддитивных помех осуществляют прием сигнала ранее описанным способом, а кодовый сигнал распознают по присутствию амплитудного пика на рабочей частоте АПС.
В частном случае кодовый сигнал считают распознанным, если фазы принятого и кодового сигналов совпадают.
В другом частном случае при сравнении фаз принятого и кодового сигналов в качестве фазы кодового сигнала используют величину фазы кодового сигнала распознанного ранее.
В еще одном частном случае импульсный кодовый сигнал распознают при равенстве длительности фронтов импульсов принятого и кодового сигналов.
Помимо указанного, технический результат достигается благодаря тому, что в способе распознавания кодового сигнала АПС на фоне аддитивных помех вычисляют в цикле мгновенные значения амплитуды и фазы принятого сигнала на рабочей частоте АПС посредством технического средства для узкочастотного вычисления величин амплитуды и фазы сигнала, которое содержит в себе поездное устройство. При этом кодовый сигнал считают распознанным при равенстве мгновенного значения фазы принятого сигнала значению фазы кодового сигнала, а амплитуду распознанного кодового сигнала принимают равной текущему мгновенному значению амплитуды принятого сигнала.
В частном случае кодовый сигнал считают распознанным при отсутствии ускорения изменения вычисленных амплитуды и фазы относительно нормальных значений.
В другом частном случае при сравнении фаз принятого и кодового сигналов используют значение фазы кодового сигнала, которое было определено для ранее распознанного кодового сигнала.
Технический результат также достигается благодаря тому, что поездное устройство АПС содержит аналоговый датчик магнитного поля, усилитель, аналоговый фильтр, аналого-цифровой преобразователь, функциональный узел цифровой фильтрации, кольцевой буфер, цифровой анализатор сигналов и устройство управления. При этом датчик магнитного поля, усилитель, аналоговый фильтр, аналого-цифровой преобразователь, функциональный узел цифровой фильтрации, кольцевой буфер, цифровой анализатор сигналов и устройство управления связаны между собой последовательно через сигнальные входы/выходы. Первый выход устройства управления связан с управляющим входом функционального узла цифровой фильтрации, а второй выход устройства управления связан с управляющим входом цифрового анализатора сигналов.
В частном случае поездное устройство АПС включает в себя управляемый генератор аналоговых сигналов и выходной усилитель, соединенные последовательно. При этом управляющий вход генератора связан с выходом устройства управления.
Также в частном случае устройство содержит генератор цифровых сигналов, связанный с выходом устройства управления.
В другом частном случае цифровой анализатор сигналов включает в себя анализатор амплитуды и анализатор фазы сигнала.
В еще одном частном случае цифровой анализатор сигналов включает в себя анализатор длительности фронта сигнала.
Сущность технического решения поясняется следующими графическими изображениями на примере предпочтительной конструкции поездного устройства для автоматической локомотивной сигнализации (АЛС).
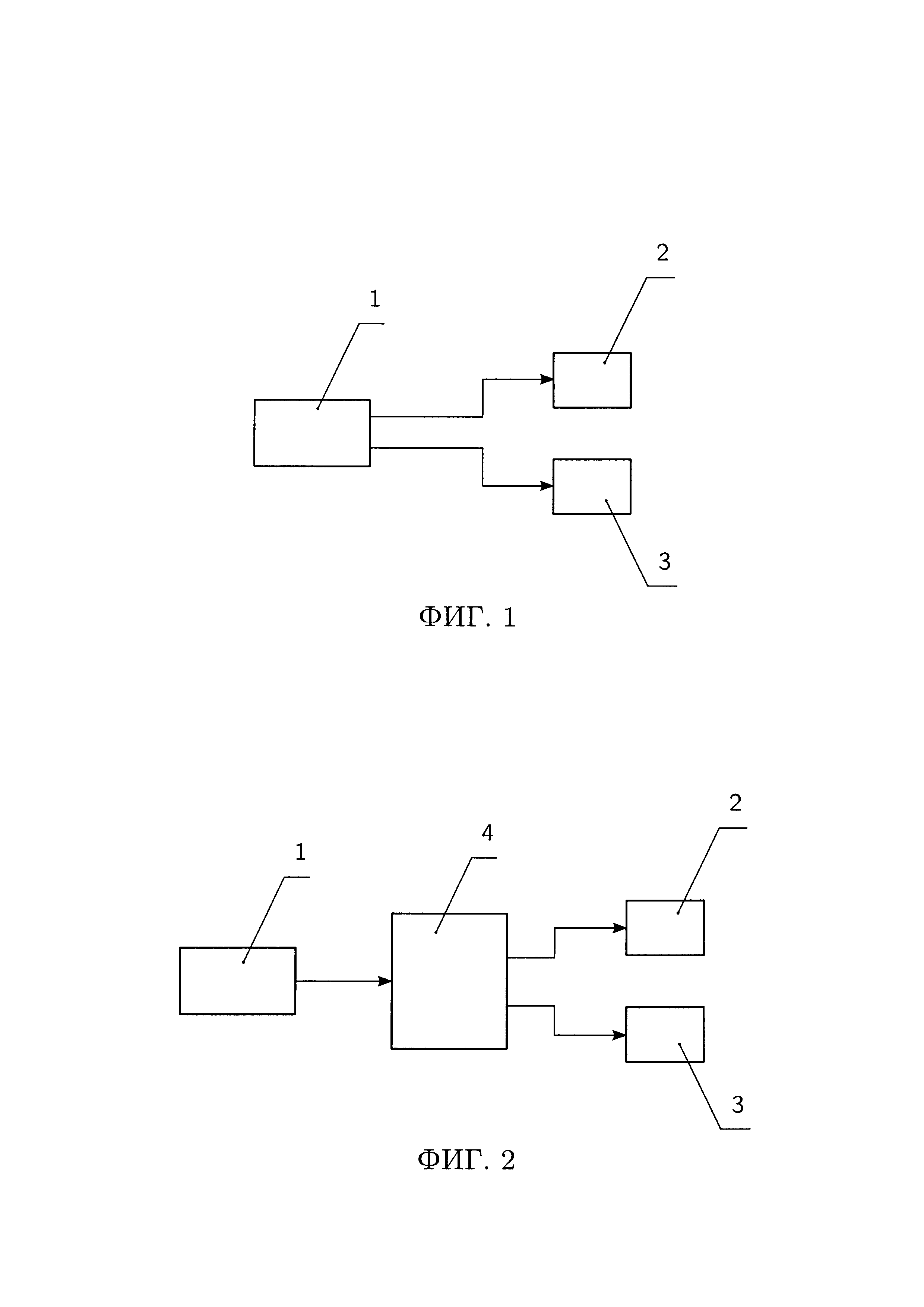
Фиг. 1: электрическая структурная схема локомотивного устройства АЛС.
Фиг. 2: схема локомотивного устройства АЛС со штатным дешифратором.
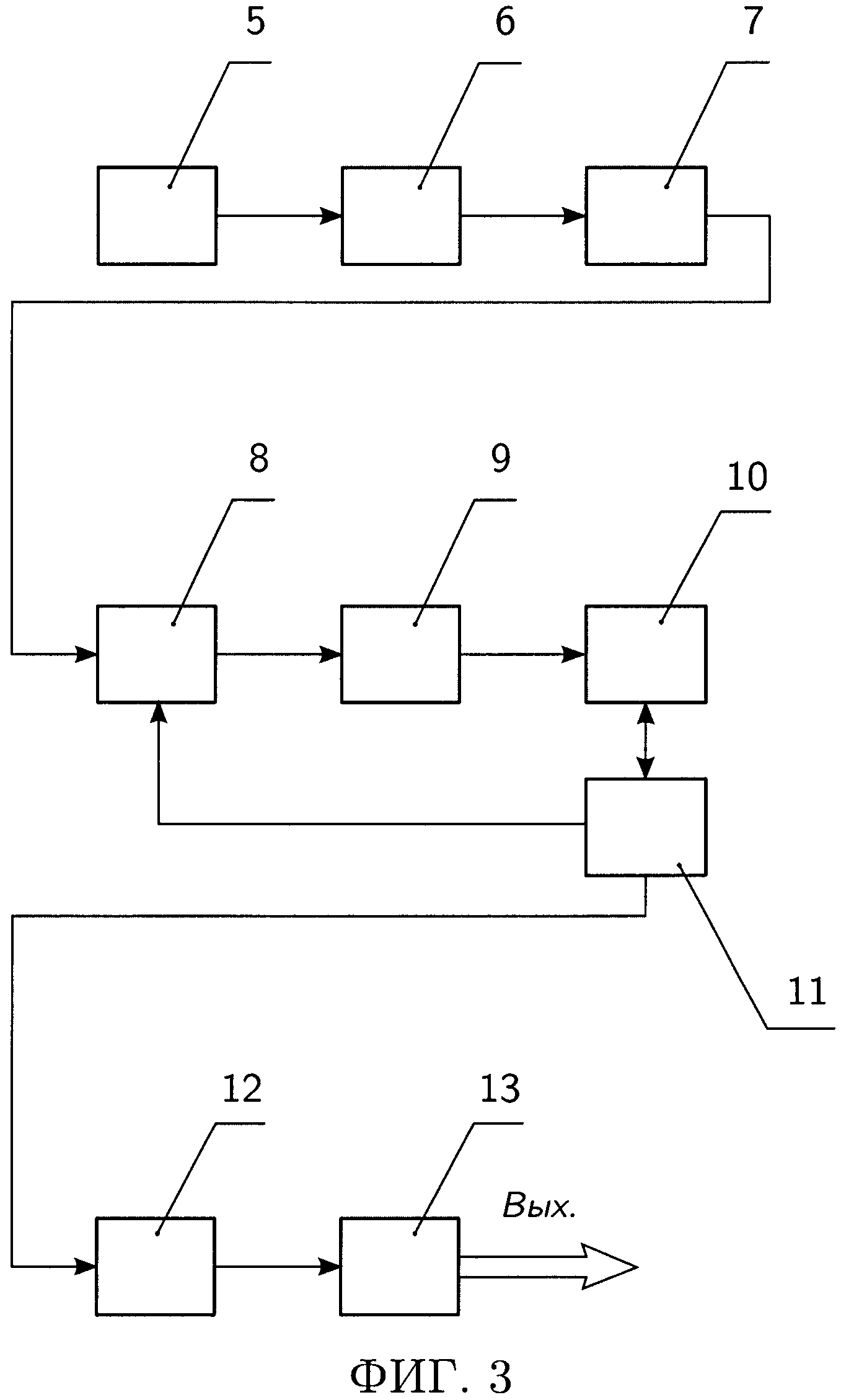
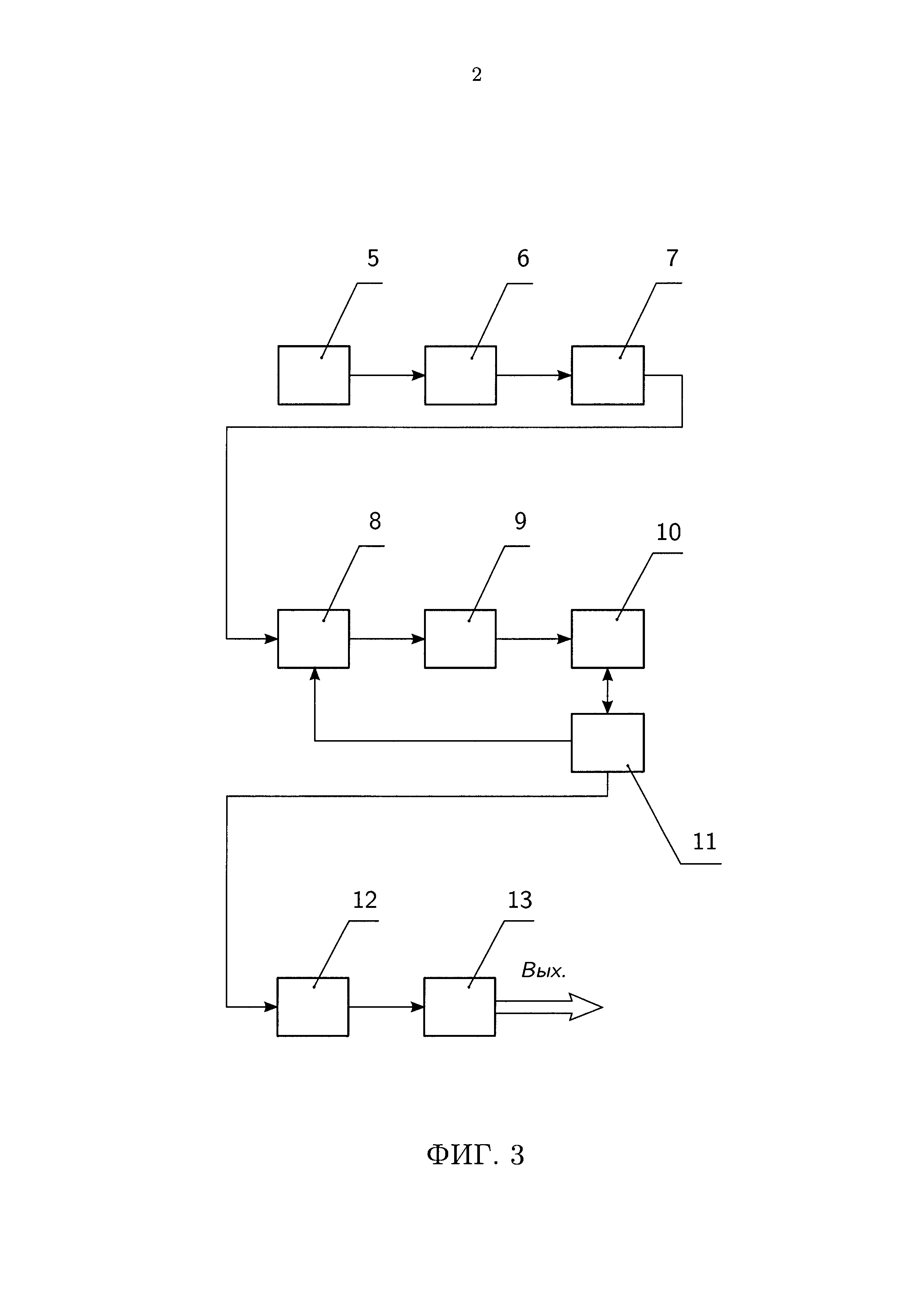
Фиг. 3: функциональная схема приемной головки.
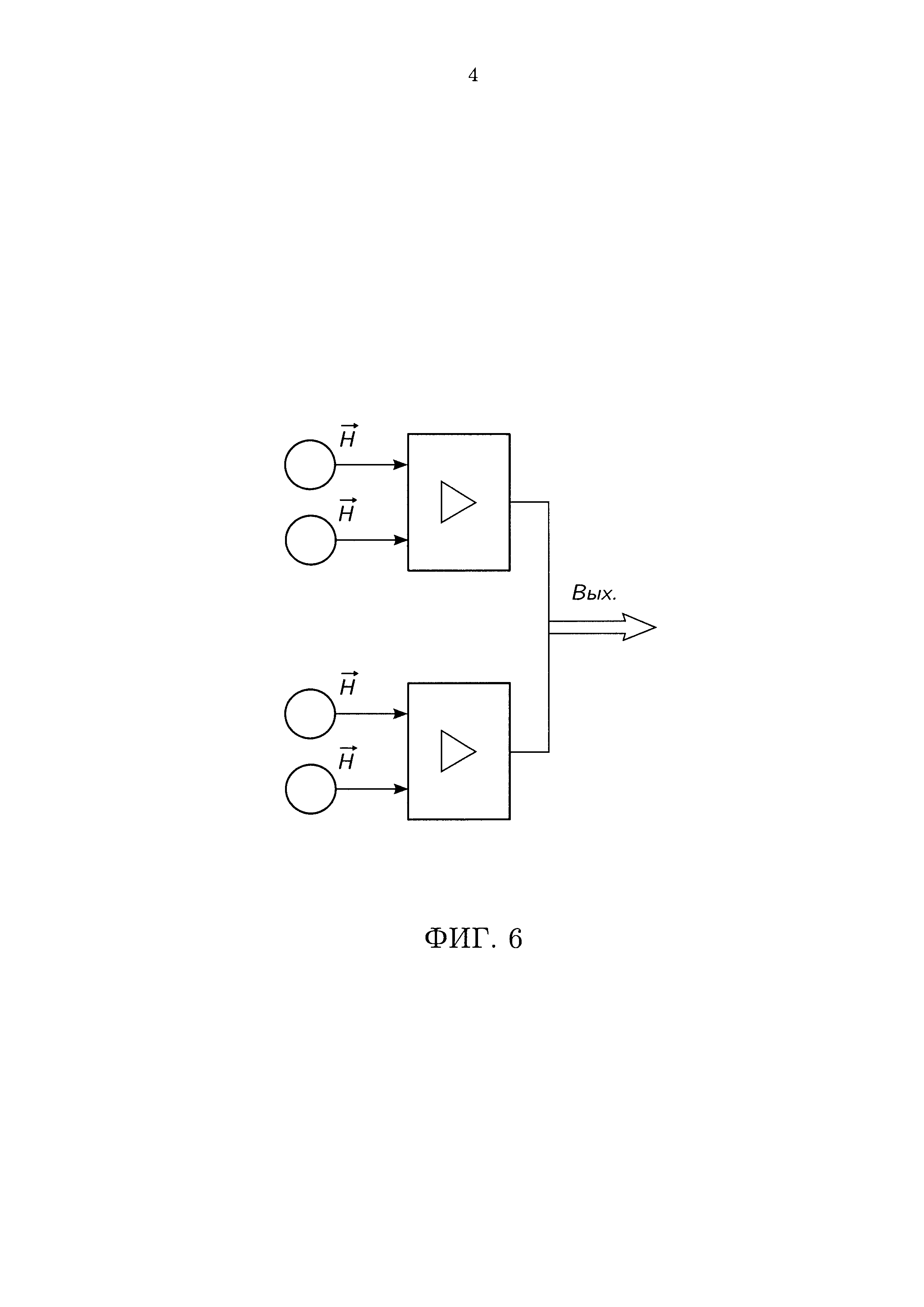
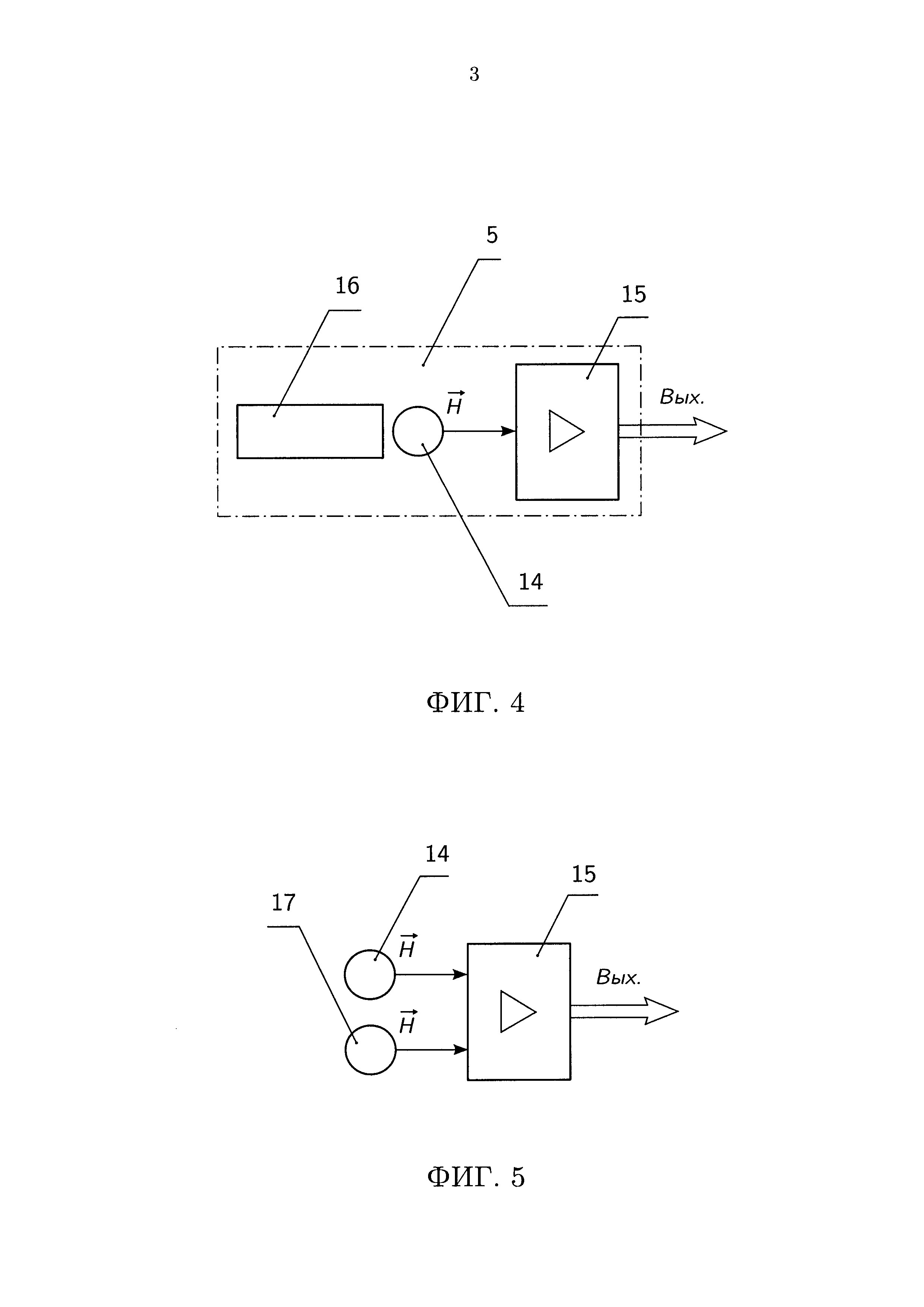
Фиг. 4-6: варианты конструкции входного каскада приемного тракта.
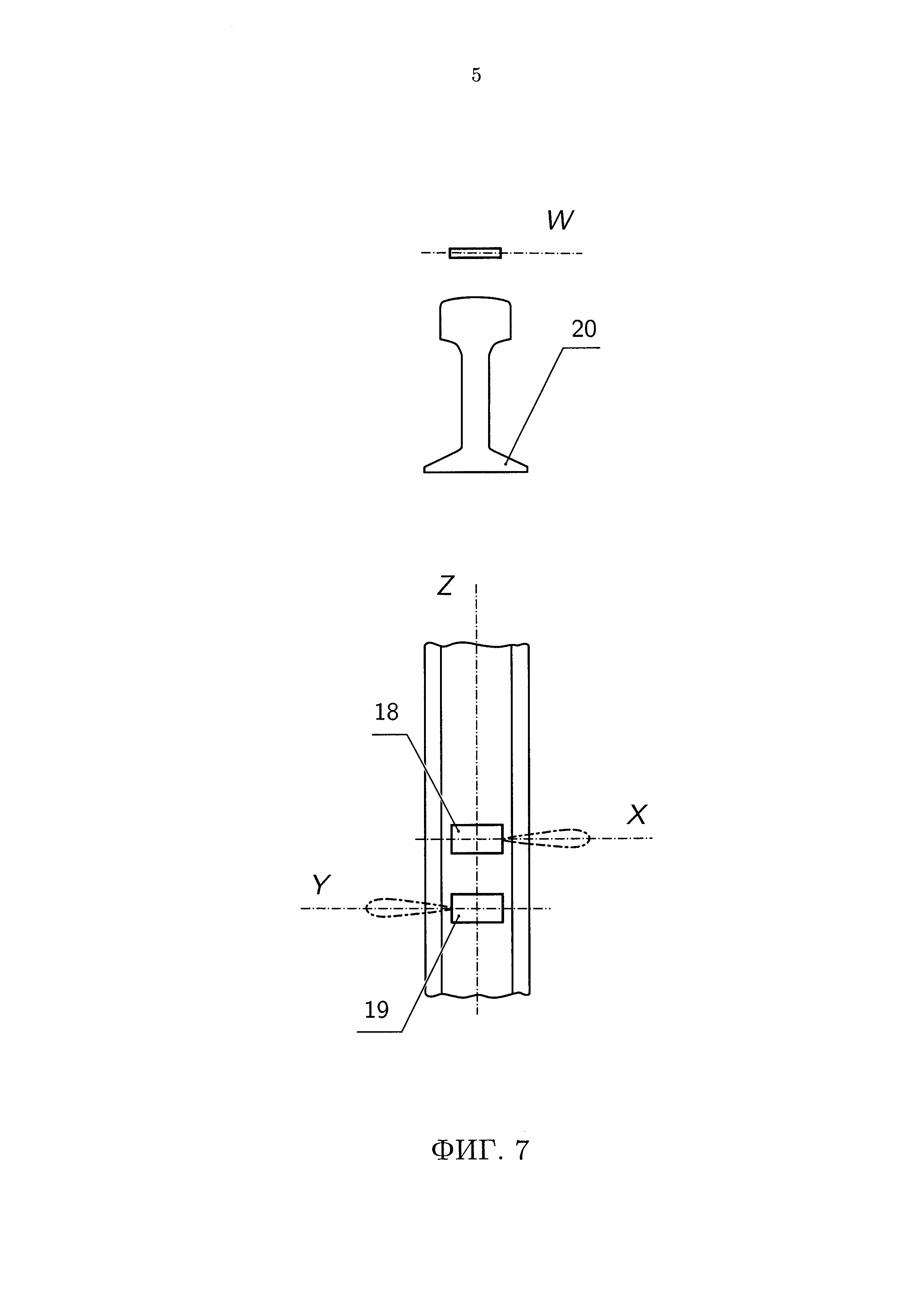
Фиг. 7: схема размещения сенсоров магнитного поля над рельсом (вид с торца и в плане).
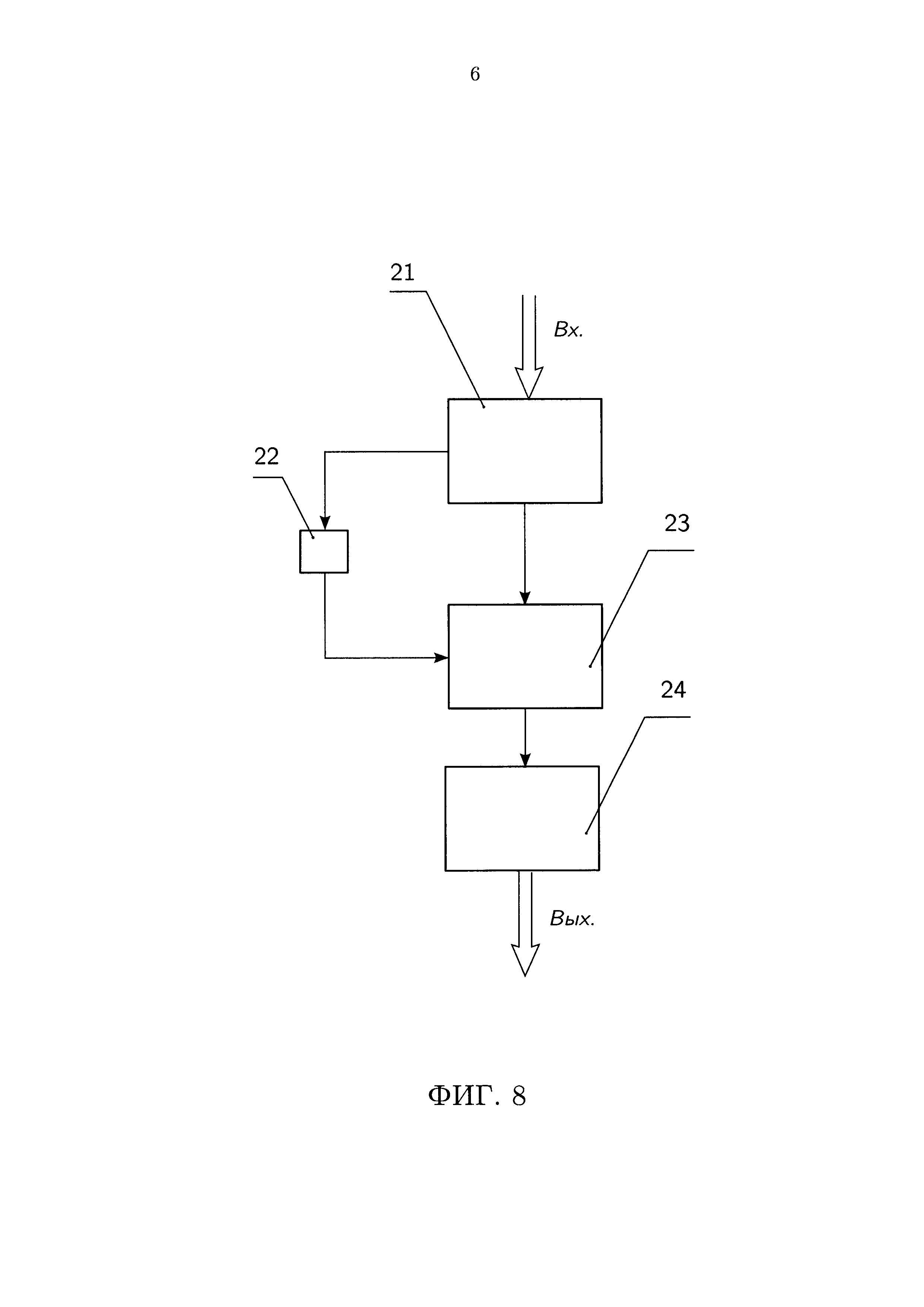
Фиг. 8: функциональная схема анализатора сигналов от путевых устройств.
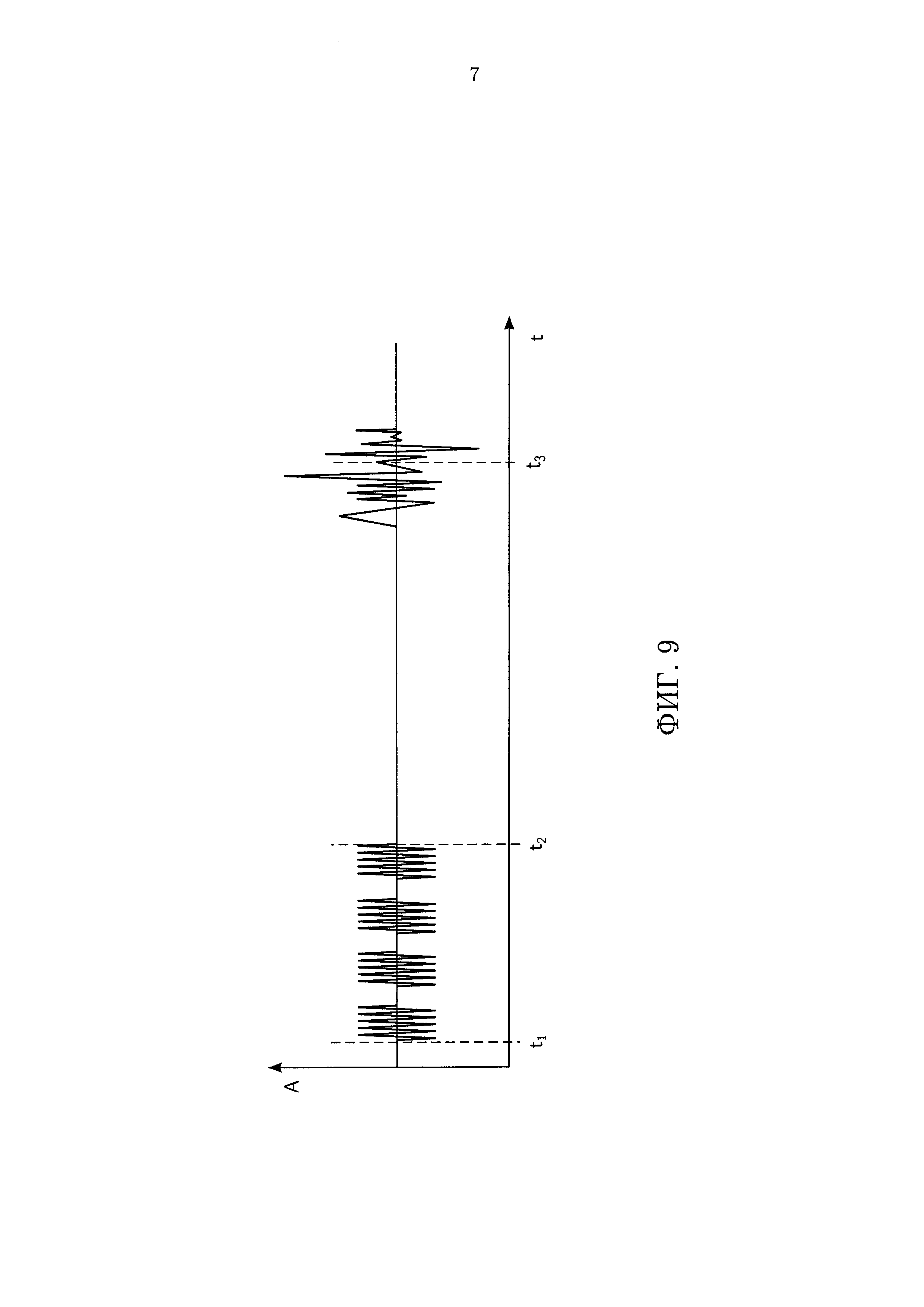
Фиг. 9: устойчивый прием кодовых сигналов и искаженный сигнал сложной формы.
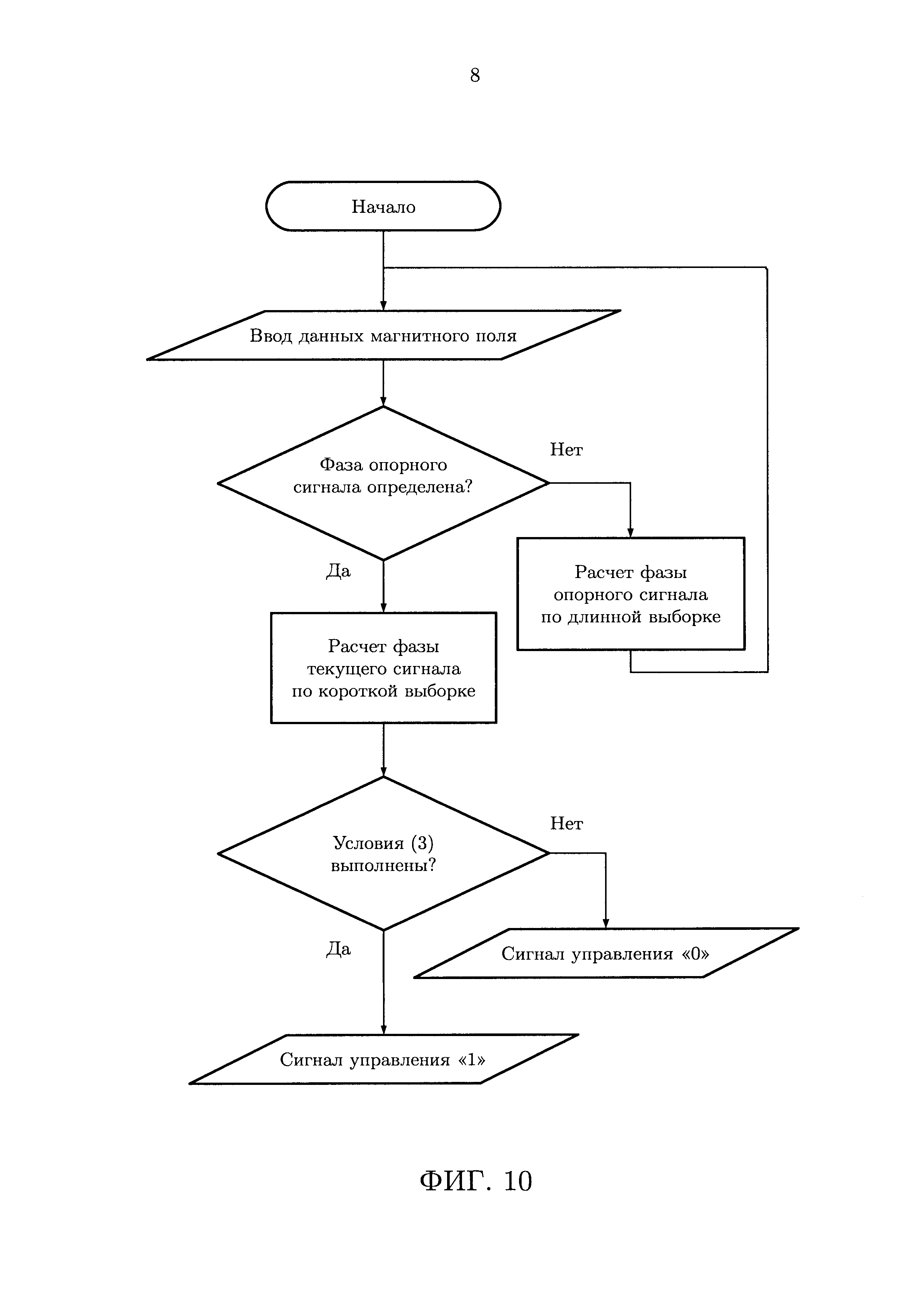
Фиг. 10: пример алгоритма работы анализатора сигналов с контролем фазы.
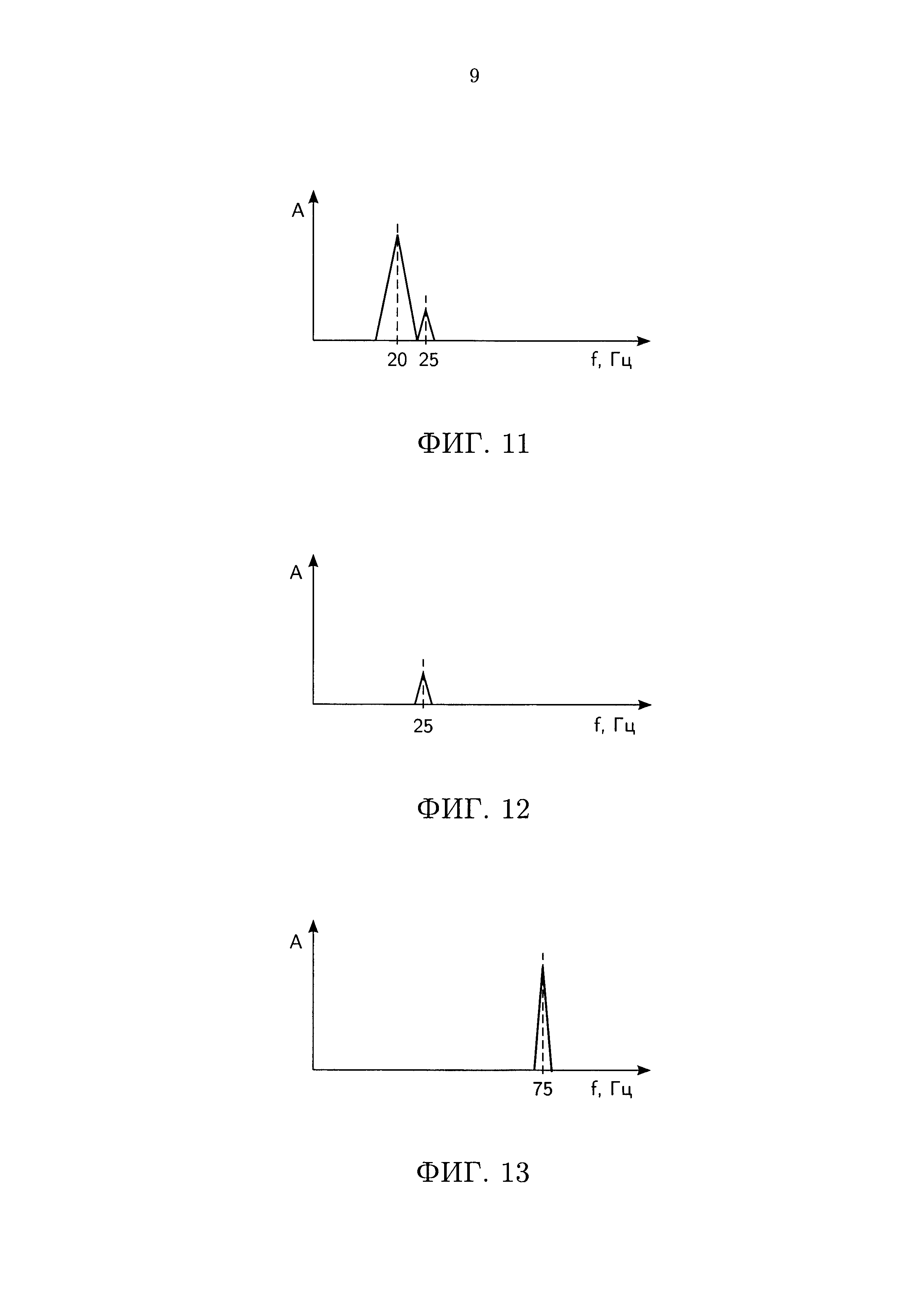
Фиг. 11: кодовый сигнал на фоне сильной помехи.
Фиг. 12: распознанный кодовый сигнал.
Фиг. 13: вторичный кодовый сигнал с образцовыми характеристиками стандарта АЛС.
Система АПС подвижного состава включает в себя источник сообщений и поездное устройство. В качестве источника сообщений выступает, например, путевой передатчик или передающая аппаратура на другом поезде, посредством которых посылают информативные сигналы в закодированном виде, в частности, о состоянии светофоров, путевых стрелок и расстоянии между поездами. Поездное устройство установлено на единице подвижного состава, например на локомотиве или вагоне, и предназначено для приема кодовых сигналов через рельсовую цепь, образованную нитями рельсов и находящимся на данном пути составом. При размещении поездного устройства АПС на локомотиве данная система представляет собой АЛС, а поездное устройство является локомотивным. АПС характеризуется достоверностью своей работы. Величина достоверности работы АПС задана при проектировании системы.
Локомотивное устройство содержит приемную головку 1 и средства индикации и/или автоматики, например, локомотивный светофор 2 в кабине машиниста, поездной автостоп 3, дисплей бортовой информационной системы, автоматический регулятор скорости движения состава. При выполнении приемной головки 1 с функцией дешифрации кода информативного сигнала данную головку соединяют непосредственно со светофором 2 и автостопом 3 (фиг. 1), а при наличии в локомотиве штатного дешифратора 4 обеспечивается возможность для связи приемной головки 1 со светофором 2 и автостопом 3 через локомотивный дешифратор 4 (фиг. 2).
Приемная головка 1 представляет собой устройство в виде активного блока с аналоговой и цифровой обработкой сигнала от кодовых токов, содержит входной каскад приемного тракта 5, аналоговый фильтр 6, аналого-цифровой преобразователь (АЦП) 7, функциональный узел 8 для цифровой фильтрации, кольцевой буфер 9, анализатор сигналов 10, устройство управления 11, управляемый генератор аналоговых или цифровых сигналов 12 и выходной усилитель 13 (фиг. 3).
Входной каскад приемного тракта 5, аналоговый фильтр 6, АЦП 7, функциональный узел 8 для цифровой фильтрации, кольцевой буфер 9, анализатор сигналов 10 и устройство управления 11 электрически связаны между собой последовательно через свои сигнальные входы и соответствующие выходы. Первый выход устройства управления 11 связан с управляющим входом функционального узла 8 для цифровой фильтрации, второй выход устройства управления 11 связан с управляющим входом анализатора сигналов 10, а третий выход устройства управления 11 связан с управляющим входом генератора 12, сигнальный выход которого в свою очередь связан со входом усилителя 13.
Все перечисленные элементы приемной головки 1 закреплены в общем корпусе этого устройства, который подвешивают под локомотивом на месте установки штатной приемной катушки.
Входной каскад приемного тракта 5 приемной головки 1 включает в себя датчик магнитного поля 14 и предварительный усилитель 15 (фиг. 4).
Приемный датчик магнитного поля 14 содержит первичный преобразователь магнитного поля для диапазона от 1 мкТл до 100 мТл. В качестве чувствительного элемента датчика 14 используют твердотельный полупроводниковый сенсор напряженности или индукции магнитного поля, работающий, например, на основе эффекта Холла или на магниторезистивном эффекте квантовомеханической природы, в частности, на эффекте гигантского магнетосопротивления.
Вариант устройства с датчиком Холла дополнен концентратором магнитного поля 16. Альтернативный вариант с магниторезистивным датчиком снабжен вспомогательным генератором для установки рабочего режима датчика, при этом управляющий вход указанного генератора связан с выходом устройства управления 11.
Датчик 14 является аналоговым устройством, его сенсор магнитного поля напрямую соединен с входом усилителя 15, причем датчик 14 и усилитель 15 расположены в непосредственной близи друг от друга.
Также датчик 14 характеризуется не более чем одной координатой измерения и закреплен внутри корпуса приемной головки 1 с учетом положения данной головки на посадочном месте локомотива для ориентирования датчика 14 из условия преимущественной перпендикулярности оси указанной координаты измерения к продольной оси рельса, на котором находится локомотив.
Входной каскад приемного тракта 5 предпочтительно содержит пару идентичных в пределах допустимой погрешности по своим рабочим параметрам датчиков магнитного поля 14 и 17, а усилитель 15 является дифференциальным (фиг. 5). Датчики магнитного поля 14 и 17 соединены с усилителем 15 таким образом, что выходной сигнал усилителя 15 пропорционален сумме входных интегральных сигналов с датчиков 14 и 17, включающих в себя как детерминированные, так и помеховые составляющие. В наилучшем варианте своего выполнения входной каскад приемного тракта 5 состоит из двух и более групп, каждая из которых включает в себя спаренные через дифференциальный усилитель датчики (фиг. 6).
При этом сенсорные полупроводниковые пластины всех групп, включая пластины 18, 19 соответственно датчиков 14 и 17, расположены так, что оси X, Y их координат измерения магнитного поля, определяемые по осям лепестков диаграмм направленности датчиков, перпендикулярны к продольной оси Z рельса 20, причем сенсорные пластины 18, 19 лежат в одной горизонтальной плоскости W (фиг. 7), что позволяет считать датчики размещенными в одинаковых условиях магнитного поля.
Датчики 14, 17 устойчивы по своим рабочим параметрам в диапазонах от 20 до 80 Гц принятого сигнала и от -60 до +60°С температуры окружающей среды.
Предварительный усилитель 15 выполнен малошумящим, характеризуется высоким входным и низким выходным сопротивлениями. В предпочтительном варианте осуществления устройства имеет дифференциальный вход.
Концентратор магнитного поля 16 для датчика 14 в виде датчика Холла представляет собой преобразователь магнитного потока в форме ферритового стержня или пластины с узкой стороной, ориентированной к датчику 14, и широкой стороной, ориентированной в сторону рельса 20. Концентратор 16 находится в непосредственной близи от датчика 14 и соосен с его координатной осью измерения для придания конструкции большей избирательной чувствительности к слабому магнитному полю сигнала АЛС.
Аналоговый фильтр 6 выполнен в виде активного полосового фильтра, имеет линейную характеристику в области частот от 20 до 80 Гц включительно, что превышает рабочий частотный диапазон АЛС 25-75 Гц. Фильтр 6 имеет простую конструкцию, т.к. пропускает только одну полосу частот, которая охватывает все возможные частоты стандарта АЛС.
Входной тракт приемной головки 1 выполнен с возможностью пропускания аналогового сигнала в диапазоне от 50 мкВ до 2,5 В.
АЦП 7 имеет эффективную разрядность не менее 18 бит при частоте оцифровки 10-50 кГц.
Для цифровой обработки сигнала приемная головка 1 содержит элементы цифровой микроэлектроники, на основе которых построены функциональный узел 8 для цифровой фильтрации, кольцевой буфер 9, анализатор сигналов 10 и устройство управления 11.
Функциональный узел 8 для цифровой фильтрации выполнен с возможностью обработки сигналов по алгоритмам одного или более цифровых фильтров для подавления импульсных, флуктуационных и синусоидальных помех. Данный узел позволяет выбрать тип фильтра и провести его настройку, в том числе с целью адаптации к качеству принятого сигнала. Например, узел 8 обеспечивает возможность узкополосной полосовой фильтрации на рабочей частоте АЛС для выделения устойчивого сигнала, линейную и нелинейную фильтрацию, в частности с конечной импульсной характеристикой для уменьшения уровня шума типа медианного фильтра, калмановскую фильтрацию или фильтрацию с экспоненциальным сглаживанием.
Кольцевой буфер 9 служит для временного хранения цифровых данных ряда последовательных отсчетов дискретизации принятого сигнала. Разрядность буфера 9 равна разрядности АЦП 7.
Анализатор сигналов 10 микропроцессорный, выполнен комплексным и включает в себя анализатор амплитуды аналогового сигнала в виде пикового детектора, анализатор фазы сигнала и анализатор длительности фронта импульсного сигнала. Анализатор 10 содержит функциональный узел 21 для узкополосного расчета амплитуды/фазы сигнала, запоминающее устройство 22, компаратор 23 и решатель 24 (фиг. 8). Пиковый детектор представляет собой функциональный узел устройства, предназначенный для поиска амплитудного пика на рабочей частоте АЛС.
Устройство управления 11 предназначено для логического управления элементами приемной головки 1. Выполнено с возможностью ввода/вывода информации.
Генератор аналоговых или цифровых сигналов 12 выполнен с возможностью формирования выходного кодового сигнала стандарта АЛС.
Усилитель 13 предназначен для усиления сигнала генератора 12 и согласования этого генератора с дешифратором 4 или со светофором 2, автостопом 3 и другими узлами локомотивного устройства.
Все перечисленные части приемной головки 1 соединены между собой сборочными операциями, обеспечивающими конструктивное единство и реализацию данным устройством общего функционального назначения.
Настоящее техническое решение работает в автоматическом режиме следующим образом.
Источник сообщений, находящийся на удаленном расстоянии от поезда, создает в рельсовой цепи электрический кодовый ток стандарта АЛС, например, модулированный по амплитуде или частотно-кодированный, следствием чего является информативное электромагнитное поле вокруг рельсовых нитей, достигающее приемной головки 1 локомотивного устройства. Магнитная индукция от минимально возможного тока АЛС вблизи штатного места приемной головки 1 составляет всего примерно 1,3⋅10-6 Тл, что делает кодовый сигнал уязвимым к действию наблюдаемых на практике более мощных помех, амплитуда которых может многократно превышать амплитуду относительно слабого детерминированного сигнала, а наложение множества фаз сильно искажает форму исходного сигнала. К полезному сигналу АЛС с кодовой информацией добавляются импульсные, флуктуационные и синусоидальные помехи разнообразной природы, в том числе широкополосные помехи, охватывающие диапазон рабочих частот АЛС. Под действием помех принимаемый локомотивным устройством сигнал приобретает сложную форму, из-за чего выделение из него кода штатным дешифратором ранее было затруднено и ненадежно.
Приемный безындукционный датчик 14 преобразует энергию магнитного поля в электрический измерительный сигнал, а именно переводит величину индукции магнитного поля в соответствующее электрическое напряжение без использования явления электромагнитной индукции. Рабочая полоса частот датчика 14 лежит в диапазоне 0-10 кГц. При использовании датчика Холла входящий магнитный поток предварительно сужают концентратором 16, что повышает чувствительность датчика данного вида к слабым полям АЛС. Магниторезистивный датчик при необходимости предварительно устанавливают в рабочий режим импульсом генератора по команде с устройства управления 11.
Датчик 14 измеряет величину магнитного поля преимущественно в направлении магнитного поля от тока АЛС, что достигается выполнением данного датчика с одной координатой измерения и его ориентированием относительно рельса 20, благодаря чему датчик имеет слабую чувствительность к помеховым составляющим магнитного поля, которые не совпадают с направлением магнитного поля АЛС. Так как датчик 14 измеряет индукцию или напряженность магнитного поля, но не чувствителен к скорости изменения данных физических величин, то амплитуда помехи от локальных зон намагниченности верхнего строения пути будет одинаковой на любой скорости движения состава, не появятся всплески помехи из-за быстрого пересечения намагниченного участка рельса или при включении тягового тока, что упрощает дальнейшую очистку принятого сигнала, а следовательно повышает помехоустойчивости устройства.
Кроме того, использование для датчика 14 полупроводникового рабочего элемента позволяет улучшить массагабаритные характеристики локомотивного устройства АЛС. Размер приемной головки 1 по настоящему техническому решению в 3-5 раз меньше соответствующей характеристики используемых в настоящее время на рельсовом транспорте штатных головок. Масса датчика 14 с электронной платой составляет 20 г при примерно 25 кг массы штатной головки.
Для улучшения соотношения сигнал/шум и повышения стабильности работы устройства в малых магнитных полях около 1 мкТл используют вход на двух и более датчиках 14 и 17, поставленных в противофазе к внешнему магнитному полю. При этом сигналы от внешнего магнитного поля суммируют усилителем 15, а соотношение сигнал/шум возрастает согласно выражению (1).

Где:
Rsn - соотношение сигнал/шум;
N - число датчиков.
В результате получают рост полезного сигнала на фоне шумовой дорожки от собственного белого шума датчиков 14, 17. Кроме того, второй датчик 17 выступает в качестве элемента резервирования, что повышает надежность локомотивного устройства АЛС.
Все датчики, в частности датчик 14, выдают аналоговый выходной сигнал, который поступает на вход усилителя 15 без какой-либо обработки, что позволяет избежать снижения чувствительности устройства к слабым магнитным полям. Малое расстояние от датчиков 14, 17 до входа усилителя 15, его высокое входное сопротивление и низкий уровень собственных шумов позволяют получить высокий коэффициент передачи полезного сигнала в приемный электронный тракт головки 1. Таким образом, входной усилитель 15 согласует характеристики датчиков 14, 17 с параметрами приемного тракта устройства. Выбор коэффициента усиления приемного тракта зависит от конкретного типа полупроводникового магниточувствительного элемента и подобран из условия не превышения амплитудой от самой сильной допустимой магнитной помехи разрядной сетки АЦП 7.
Затем принятый широкополосный сигнал подвергают аналоговой фильтрации с целью подавления частот вне стандарта АЛС. Например, отсечка ниже частоты 20 Гц хорошо защищает от помех при движении над намагниченными участками рельса и рельсовыми стыками, а выше 80 Гц отсекаются мощные ударные помехи.
В предпочтительном варианте осуществления технического решения частоты измерительного сигнала вне расширенной на 10% с каждой стороны рабочей полосы частот АЛС подавляют полностью. Выбор данных границ связан с необходимостью обеспечения надежного приема кодовых сигналов даже при дрейфе характеристик фильтра 6 или в условиях присутствия в канале связи АЛС мультипликативных помех. Каскад аналоговой фильтрации позволяет улучшить соотношение сигнал/помеха в полном сигнале на уровне приемного тракта локомотивного устройства АЛС и разгружает АЦП 7.
Увеличение соотношения сигнал/помеха для аналогового тракта локомотивного устройства, а также высокий коэффициент передачи полезного сигнала позволяют расширить динамический диапазон по уровню входного сигнала. Например, минимальный сигнал от тока АЛС в рельсе 20 на выходе фильтра 6 составляет не менее 1 мВ, что обеспечивает динамический диапазон приемного тракта, как отношения в уровне между высшим пиком сигнала АЛС и амплитудой высшей спектральной составляющей шума, не хуже 1⋅104-1⋅106.
После грубой аналоговой фильтрации принятый сигнал оцифровывают посредством АЦП 7. Большая разрядность АЦП 7 и широкий динамический диапазон приемного тракта устройства позволяют одновременно зафиксировать минимально возможный сигнал АЛС и максимально допустимую помеху. Уровень минимально возможного сигнала АЛС, так же как и уровень максимально допустимой помехи известны из проектной документации АЛС. Так как кодовый сигнал АЛС имеет величину не менее 1 мВ, а АЦП 7 различает 50 мкВ, то для минимального полезного сигнала будет 20 градаций по амплитуде, что означает устойчивую регистрацию и обработку цифровыми каскадами устройства.
При частотном кодировании информации АЛС частоту оцифровки выбирают из условия (2) для обеспечения определения фазы сигнала с отклонением не более 1%. Частота оцифровки 10 кГц достаточна для работы с амплитудой и фазой кодового сигнала частотой до 1 кГц.

Где:
F - частота оцифровки;
ƒ - частота кодового сигнала.
Оцифрованный сигнал затем проходит этап точной и гибкой цифровой фильтрации. Для этого эмпирически подбирают коэффициенты для цифровых фильтров, например, среднеквадратическое ожидание, с учетом заводских характеристик датчика 18. При помощи устройства управления 11 настраивают фильтры узла 8 и выбирают конкретные фильтры для текущей помеховой обстановки на линии связи АЛС и алгоритмов обработки данных в следующем каскаде устройства. Настройку и выбор фильтров осуществляют из условия получения наиболее чистого и четкого сигнала на выходе функционального узла 8 для цифровой фильтрации, наиболее близкого к идеальному сигналу по стандарту АЛС.
Если анализатор сигналов 10 находится в режиме, который не предусматривает самостоятельное выделение узкополосного сигнала АЛС, то выбор частоты сигнала, на которой работает источник сообщений, производят посредством узла 8. Кроме того, цифровые фильтры очищают и сглаживают сигнал. Для достижения наибольшей эффективности их целесообразно использовать во взаимодополняющей совокупности. Например, после медианной фильтрации, которая хорошо подавляет шумовые выбросы отсчетов случайного характера и помехи в виде одиночных импульсов, следует применить калмановскую фильтрацию флуктуационного шума.
Устройство управления 11 предпочтительно периодически проверяет качество цифровой фильтрации, после чего, при необходимости, производит подстройку и/или выбор цифровых фильтров для адаптации фильтрации к качеству принимаемого сигнала АЛС.
Очищенные цифровой фильтрацией числовые данные заносят в кольцевой буфер 9 для согласования работы каскада фильтрации и последующего анализа, что увеличивает быстродействие обработки сигнальной информации в широком диапазоне амплитуд и фаз, а следовательно положительно сказывается на помехоустойчивости локомотивного устройства АЛС.
По завершению цифровой фильтрации измерительный сигнал анализируют с целью нахождения амплитудного пика на рабочей частоте АЛС. Для этого сначала вычисляют мгновенные значения амплитуды сигнала на интересующей частоте при помощи узла 21, работающего, например, по алгоритму Герцеля, и реализующего собой техническое средство для узкочастотного вычисления величин амплитуды и фазы сигнала. Таким образом осуществляется выбор частоты сигнала путевого или иного передающего устройства без использования сложных аналоговых схем. Затем задействуют пиковый детектор, настроенный на частоту АЛС и не реагирующий на частоты помех. Если амплитудный пик распознан, то устройство управления 11 подает сигнал разрешения на вход генератора 12. В качестве альтернативы возможен расчет амплитуд по методу быстрого преобразования Фурье в узкополосном диапазоне, выделенном узлом 8. При этом в качестве технического средства для узкочастотного вычисления величин амплитуды и фазы сигнала выступает совокупность узлов 8 и 21.
Большой динамический диапазон приемной головки 1 в совокупности с цифровой фильтрацией позволяют отстроить кодовый сигнал АЛС даже от превосходящих детерминированный сигнал в 10 раз аддитивных помех на частотах, близких к рабочей частоте АЛС.
Еще большее повышение помехоустойчивости локомотивного устройства АЛС достигают путем дополнительного анализа амплитуды, фазы или длительности фронта принятого сигнала, что позволяет более надежно разграничить детерминированный и помеховый сигналы. Для этого используют длинную и короткую выборки данных. По длинной выборке, в период устойчивого приема (интервал t1-t2 на фиг. 9), с высокой степенью достоверности определяют параметры сигнала АЛС и временно сохраняют их в запоминающем устройстве 22, принимая за опорные величины. Например, при контроле амплитуды и фазы сигнала, могут быть использованы условия (3).

Где:
А - амплитуда текущего сигнала (момент времени t3 на фиг. 9);
Аn - максимальная амплитуда шума на частоте АЛС;
Р - фаза текущего сигнала;
Рr - фаза опорного сигнала;
D - коэффициент.
Коэффициент D подбирают эмпирически, обычно он характеризует отклонение фазы не более чем на 5%.
После успешного определения фазы опорного сигнала по длинной выборке данных записывают значение Рr в устройство 22, а затем вычисляют фазу текущего сигнала Р по короткой выборке. Величина А определена на стадии поиска пика амплитуды, а Аn известна заранее из характеристик АЛС. После этого сравнивают компаратором 23 текущие значения с опорными и, если условия (3) истинны, то решатель 24 выдает сигнал управления «1» (фиг. 10), поступающий на вход устройства управления 11, которое подает соответствующую команду на вход генератора 12. В течение заданного времени приемная головка 1 держит синхронизацию с опорным сигналом, а по истечении этого времени заново проводит вычисления по длинной выборке, чтобы обеспечить высокую достоверность работы системы АЛС.
Анализатор длительности фронта импульсного сигнала работает по аналогичной процедуре, сравнивая длительность фронта принятого сигнала с априорно известной длительностью фронта сигнала АЛС при отсутствии помех. Если разница между сравниваемыми величинами лежит в заданном диапазоне, то делают вывод о том, что принятый сигнал распознан в качестве кодового.
В качестве другого критерия отличия детерминированного сигнала от помехи используют ускорение изменения вычисленных амплитуды и фазы относительно нормальных для стандарта АЛС значений. Если наблюдается аномально резкое изменение амплитуды и/или фазы принятого сигнала, то делают вывод о том, что это помеха и не учитывают сигнал. Опорные значения в этом режиме работы устройства не вычисляют.
Частотно-кодированные сигналы АЛС распознают по характерным частотам и длительности, для чего определяют амплитуды и фазы одновременно на более чем одной заданной частоте.
Конкретный режим работы анализатора сигналов 10 задает устройство управления 11 по команде машиниста или в автоматическом режиме из условия распознавания наибольшего числа кодовых сигналов АЛС за единицу времени. Устройство управления 11 содержит информацию о характеристиках восстановленного в процессе работы устройства кодового сигнала источника сообщения.
После выдачи сигнала разрешения устройством управления 11 генератор 12 формирует выходной кодовый сигнал с образцовыми характеристиками стандарта АЛС, благодаря чему обеспечивается помехоустойчивая работа дешифратора 4 и возможность однозначной дешифрации кода за счет работы с чистым кодовым сигналом, параметры которого, например частота, амплитуда и фаза, идентичны или крайне близки к параметрам исходного сигнала на выходе источника сообщения, что ведет к безотказности работы системы АПС в условиях зашумленности кодовых сигналов путевых устройств с заданной для данной системы достоверностью. Сгенерированный сигнал является вторичным по отношению к принятому и распознанному кодовому сигналу. Задержка вторичного кодового сигнала относительно исходного сигнала пренебрежимо мала.
В предпочтительном варианте осуществления технического решения устройство управления 11 запускает генератор 12 только после проверки возможности декодирования сигнала, который будет сгенерирован. Например, устройство управления 11 обладает информацией о ряде распознанных импульсов и если устройство управления 11 успешно декодирует код импульсов, то делают вывод о том, что эти импульсы несут в себе сообщение АЛС, после чего генерируют и подают вторичный кодовый сигнал на дешифратор 4. Если устройство управления 11 не способно декодировать код указанных импульсов, то предполагается, что и штатный дешифратор 4 не справится с декодированием качественно. В таком случае устройство управления 11 не включает генератор 12, что позволяет избежать возможной ошибочной интерпретации сигнала дешифратором 4.
Амплитуду вторичного кодового сигнала задают усилителем 13, она не зависит от амплитуды принятого сигнала АЛС и уровня помех.
Таким образом, даже на фоне более мощной помехи (20 Гц на фиг. 11) удается распознать кодовый сигнал (25 Гц на фиг. 11), восстановить его (фиг. 12) и сформировать вторичный кодовый сигнал стандарта АЛС (75 Гц на фиг. 13).
Наибольшее повышение помехоустойчивости локомотивного устройства АПС на фоне маскирующих кодовый сигнал аддитивных помех обеспечивается при сочетании высокой чувствительности приемного устройства и стабильной работе устройства в слабых магнитных полям АПС, его низкой чувствительности к внешним помехам, малому уровню собственных шумов, одновременной фиксации слабого сигнала АПС на фоне сильной помехи, комплексной цифровой фильтрацией импульсных, флуктуационных и синусоидальных помех, дополненной анализом характеристик сигналов, позволяет устойчиво распознать кодовый сигнал АПС на фоне аддитивных помех в широком диапазоне их амплитуд и независимо от фаз помех. В результате этого сбои в работе АПС из-за действия аддитивных помех практически исключены, система обеспечивает высокую эксплуатационную надежность и функционирует с заданной достоверностью даже в условиях сильной зашумленности кодовых сигналов.
При размещении поездного устройства АПС не на локомотиве, а на другой единице подвижного состава, настоящее техническое решение функционирует аналогичным образом, вне зависимости от подачи управляющего воздействия на поездное средство индикации или автоматики или на их совокупность.
Способ распознавания кодового сигнала на фоне аддитивных помех
Способ повышения давления и экономичности лопастных турбомашин
Рабочее колесо центробежного вентилятора
Метла
Радиально-вихревая турбомашина
Способ изготовления сверхпроводникового детектора
Способ повышения давления и экономичности лопастных турбомашин радиального типа
Радиально-вихревая турбомашина
Рабочее колесо центробежного вентилятора
Способ создания подъемной силы и устройство для его осуществления
Способ диагностического контроля технических параметров подземного трубопровода

