Результат интеллектуальной деятельности: ЗЕРНОУБОРОЧНЫЙ КОМБАЙН
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к зерноуборочному комбайну в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Зерноуборочные комбайны служат для уборки и обмолота зерновых культур. При этом обмолот производится с помощью молотильного аппарата, который извлекает зерновую массу из принятой жатвенным аппаратом убранной массы, а затем эта убранная масса после обмолота проходит сепарирование и очистку и зерно подается в зерновой бункер. В качестве других фракций убранной массы остаются, например, солома и полова, которые либо распределяются на поле, либо, - это касается соломы, - могут укладываться в валок, например, для последующего подбора тюковым прессом. Здесь и в дальнейшем под понятием убранной массы следует понимать весь принимаемый молотильным аппаратом поток материала, то есть включая зерно, которое еще не было извлечено из убранной массы в качестве зерновой массы, а также включая то зерно, которое остается в потоке убранной массы в качестве потерь и выгружается вместе с соломой.
В молотильном аппарате зерно вытесняется из соломы по принципу интенсивной обработки трением, - вымолачивается, - и отделяется от остального потока убранной массы, так что оно может подаваться непосредственно на очистку. Остальной поток убранной массы подается в область сепарирования, в которой, например, с помощью соломотряса из него отделяется оставшееся зерно и также направляется на очистку.
Существует целый ряд критериев, на основе которых может оцениваться качество процесса обмолота. Во-первых, из потока убранной массы должны быть извлечены по возможности все зерна и направлены в зерновой бункер, при этом в зерновой массе должно быть как можно меньше дробленых зерен, - битого зерна, - и низкая доля не содержащих зерна фракций. Во-вторых, солома должна быть не слишком изломана или измельчена, чтобы не затруднять ее последующее использование. В-третьих, должно по возможности выдерживаться краткое время для обработки поля и по возможности низкое потребление топлива. Возможны и другие критерии. В зависимости от общей ситуации, в частности, от конкретных экономических предельных условий, имеют приоритет различные критерии, которые объединяются в стратегию проведения процесса уборки.
Выполнение указанных критериев качества предусматривает, что молотильный аппарат настраивается определенным образом, который зависит не только от конкретных критериев качества, но также от различных условий среды, зерноуборочного комбайна и, в частности, самого молотильного аппарата и от состава убранной массы. При этом приоритетность одного критерия качества, как правило, идет в ущерб другому критерию.
Из уровня техники, а именно, из патентного документа ЕР 1731017 В2 известно устройство управления, в котором предусмотрен специальный процесс управления для оптимизации молотильного аппарата, - процесс оптимизации управления молотильным аппаратом. При активизации этого процесса он устанавливает на молотильном аппарате «оптимальные» параметры настройки и затем отключается. При этом данный процесс оптимизации молотильного аппарата протекает всегда одинаково, в частности, с одними и теми же настройками. Кроме того, активизация процесса оптимизации молотильного аппарата отключает текущий процесс регулирования скорости движения зерноуборочного комбайна, так что он не может выполняться одновременно.
Кроме того, из патентного документа DE 102009009767 А1, являющегося прототипом для настоящего изобретения, известен зерноуборочный комбайн с системой содействия водителю, которая измеряет различные величины в комбайне (например, число оборотов барабана, просвет подбарабанья, зерновые потери) и на их основе проверяет, не достигли ли они критической области или не перешли ли верхний или нижний пределы. В случае такой ситуации система содействия водителю интерактивно связывается с водителем, при этом водителю предлагаются меры по настройке молотильного аппарата, которые должны выводить из критической области. Водитель может принимать или отклонять эти предложения, при этом на следующем шаге водителю делаются альтернативные предложения или предложенные меры могут быть точнее конкретизированы водителем путем ввода.
Недостаток этих решений уровня техники состоит в том, что несмотря на помощь системы содействия водитель должен регулярно вводить многочисленные и при этом довольно специфические задания для текущего регулирования молотильного аппарата. При этом через некоторое время после предпринятого изменения настройки система содействия запрашивает водителя о наступлении действия предпринятого изменения. Таким образом, разгрузка водителя от ручной настройки осуществляется только в ограниченном объеме, и требуется постоянное внимание водителя. К тому же достижение желаемых критериев качества требует от водителя знания текущих требуемых мер и специальных сельскохозяйственных знаний, чтобы задавать системе содействия водителю задания, направленные на достижение цели.
Раскрытие изобретения
Исходя из уровня техники, задачей настоящего изобретения является дальнейшее развитие и усовершенствование известного из уровня техники зерноуборочного комбайна с системой содействия водителю для обеспечения возможности всеобъемлющего и улучшенного регулирования молотильного аппарата с меньшей нагрузкой на водителя.
Решение указанной проблемы достигается в зерноуборочном комбайне, обладающем признаками ограничительной части пункта 1 формулы изобретения, за счет признаков отличительной части пункта 1.
Существенно для изобретения то, что молотильный аппарат совместно с системой содействия водителю образует молотильный автомат. Это означает, что система содействия водителю со своей памятью для записи данных и своим процессором выполнена с возможностью самостоятельного определения отдельных машинных параметров молотильного аппарата и задания их молотильному автомату. Такие машинные параметры названы здесь «параметрами молотильного аппарата». Основу для определения параметров молотильного аппарата образует выбор пользователем стратегий процесса уборки, записанных в памяти системы содействия водителю.
В предлагаемом решении при единичном выборе водителем активной стратегии процесса уборки может быть задан вид и характер управления молотильным аппаратом. При этом для определения параметров молотильного аппарата в более узком смысле от водителя не требуется дополнительного ввода. Однако водитель имеет возможность изменять по желанию выбранную стратегию процесса уборки, после чего дальше следует самостоятельное управление, но с другой приоритетностью.
В предпочтительном примере осуществления согласно пункту 2 формулы изобретения в памяти записана функциональная системная модель по меньшей мере для части зерноуборочного комбайна, которая образует основу для самостоятельного определения по меньшей мере одного параметра молотильного аппарата. Понятие «функциональная системная модель» означает, что по меньшей мере часть функциональных взаимосвязей внутри зерноуборочного комбайна отображается системной моделью. Примеры этого будут приведены ниже.
В следующем предпочтительном примере осуществления согласно пункту 3 в ходе процесса уборки процессор настраивает системную модель на действительное состояние процесса уборки. Здесь изобретательская идея состоит в том, чтобы системную модель, лежащую в основе самостоятельного определения параметра молотильного аппарата, в частности, циклически настраивать на действительные условия.
Циклическое определение параметров молотильного аппарата в ходе процесса уборки является предметом изобретения по пункту 4. При этом понятие «циклически» следует понимать в широком смысле и здесь означает непрерывное определение с постоянным или переменным временем циклов. Такое циклическое определение по меньшей мере одного параметра молотильного аппарата приводит к своевременному реагированию зерноуборочного комбайна на изменение состояния процесса уборки. В этой связи предпочтительна также, как это предложено в пункте 3, циклическая настройка системной модели на действительное состояние процесса уборки. Время циклов настроено достаточно коротким для достижения указанного выгодного времени реагирования.
Предпочтительно в ходе периодического способа процессор настраивает системную модель на действительное состояние процесса уборки, так что системная модель пошаговым образом приближается к действительным условиям.
Состояние процесса уборки охватывает все данные, которые каким-либо образом относятся к процессу уборки. К состоянию относятся данные полевой растительности и/или параметры процесса уборки и/или параметры молотильного аппарата и/или данные окружающей среды (пункт 5 формулы изобретения).
В особенно предпочтительном примере осуществления по пункту 6 предусмотрена система датчиков для восприятия по меньшей мере части состояния процесса уборки. Благодаря этому обеспечивается возможность особенно простой реализации заявленной выше циклической настройки системной модели.
В следующих предпочтительных примерах осуществления по пунктам 7 и 8 по меньшей мере часть состояния процесса уборки может быть введена через устройство ввода/вывода. За счет этого могут быть верифицированы данные от датчиков или определены величины состояния, трудно поддающиеся определению датчиками.
В следующем предпочтительном примере осуществления по пункту 9 в памяти системы содействия водителю записана по меньшей мере одна исходная модель, которая может служить в качестве начальной величины, в частности, при заявленной выше непрерывной настройке системной модели. При соответствующем выборе исходной модели обеспечивается возможность за небольшое число циклов настройки привести системную модель в хорошее соответствие с действительными условиями.
Для отображения функциональных связей посредством системной модели согласно пункту 12 предпочтительно предусмотрено, что по меньшей мере для одного параметра процесса уборки предназначено по меньшей мере одно поле характеристических кривых, причем этот параметр процесса уборки является выходной величиной по меньшей мере одного поля характеристических кривых. С помощью этого поля характеристических кривых даже сложные функциональные взаимосвязи могут быть отображены с невысокими вычислительными затратами. В частности, с невысокими вычислительными затратами может быть реализована указанная, в частности, повторяющаяся настройка системной модели.
Здесь и предпочтительно указанное поле характеристических кривых полностью отображает зависимость выходной величины по меньшей мере от одной входной величины, в частности, от двух или больше входных величин.
Согласно пунктам 13 и 14 предусмотрено особое структурирование по меньшей мере одного поля характеристических кривых, которое учитывает тот факт, что параметры «число оборотов барабана» и «просвет подбарабанья» имеют особое значение для реализации указанных выше стратегий процесса уборки.
В отношении указанной выше настройки системной модели на действительное состояние процесса уборки согласно пункту 16 предусмотрено, что процессор в ходе процесса уборки, в частности, циклически настраивает по меньшей мере одно из полей характеристических кривых на действительное состояние процесса уборки. Для реализации такой настройки предпочтительно предусмотрено, что множество точек в пределах поля характеристических кривых измеряются с помощью системы датчиков. Совмещение измеренных точек с соответствующими точками системной модели приводит к адаптации по меньшей мере одного поля характеристических кривых.
Для реализации выбранной стратегии процесса уборки на основе системной модели согласно пункту 17 предусмотрена запись в памяти по меньшей мере одной инструкции по реализации. Примером такой инструкции по реализации является определение по меньшей мере одного параметра молотильного аппарата в процессе одного только управления. В простейшем случае для определения по меньшей мере одного параметра молотильного аппарата процессор работает на основе описанного выше по меньшей мере одного поля характеристических кривых. В ходе определения по меньшей мере одного параметра молотильного аппарата можно обойтись без сложного процесса регулирования с соответствующей обратной связью регулирования.
Следующая предпочтительная для использования инструкция по реализации согласно пункту 20 состоит в том, что для одновременной реализации конкурирующих друг с другом стратегий процесса уборки используется многоцелевая оптимизация.
И наконец, следующая предпочтительная для использования инструкция по реализации согласно пункту 21 состоит в определении приоритетности, на основе которой процессор предпринимает назначение приоритетности между различными аспектами. В рамках многоцелевой оптимизации определение приоритетности обеспечивает возможность определения параметров молотильного аппарата. Пункты 22-24 относятся к предпочтительному выбору такой приоритетности.
Другие предпочтительные инструкции по реализации, относящиеся к настройке или оптимизации отдельных параметров, предпочтительно параметров процесса уборки, являются предметами изобретения по пунктам 25 и 26.
Краткое описание чертежей
Другие особенности, признаки, задачи и преимущества изобретения будут описаны на предпочтительном примере осуществления со ссылками на прилагаемые чертежи. На чертежах:
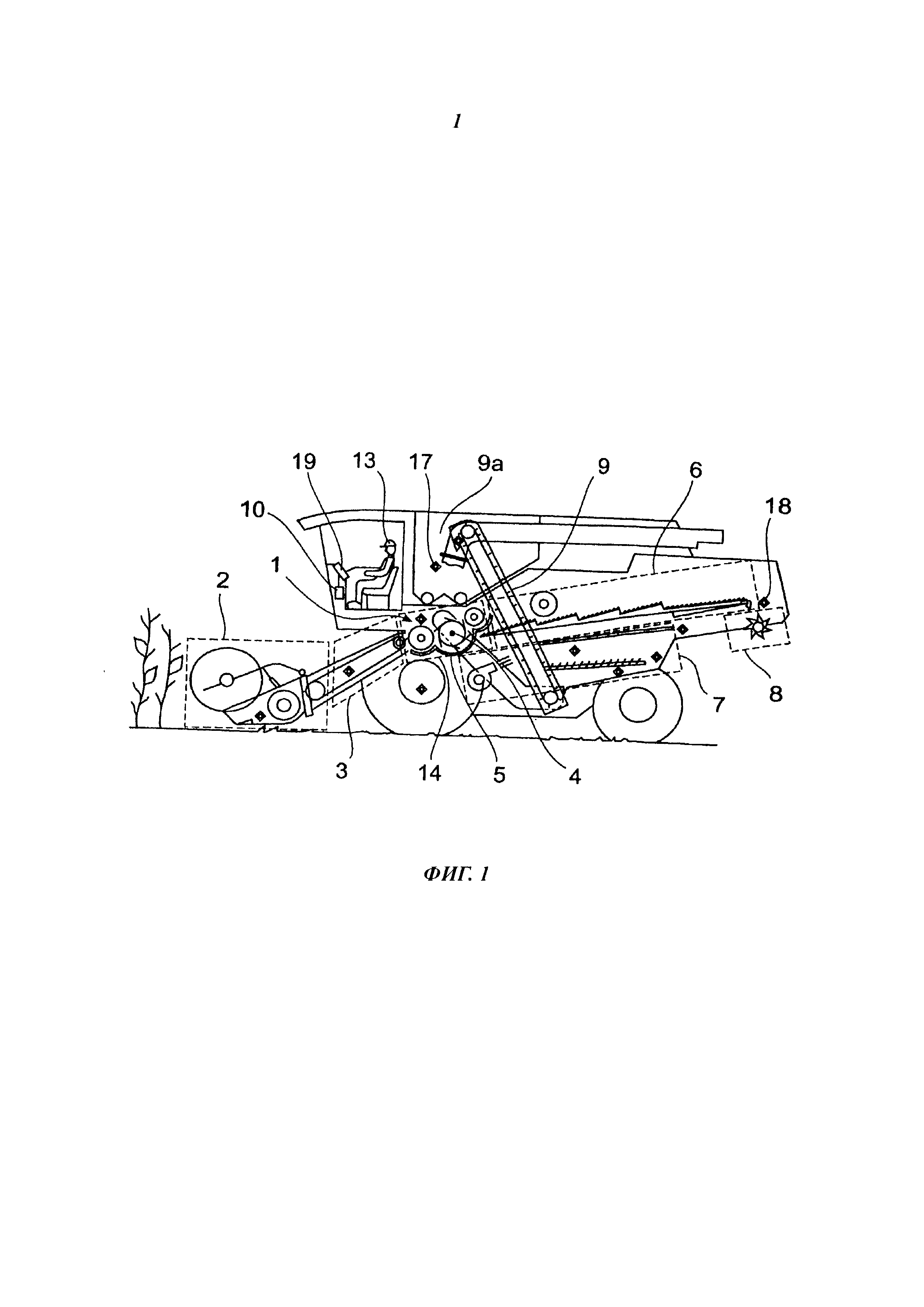
фиг. 1 изображает на виде сбоку предлагаемый зерноуборочный комбайн,
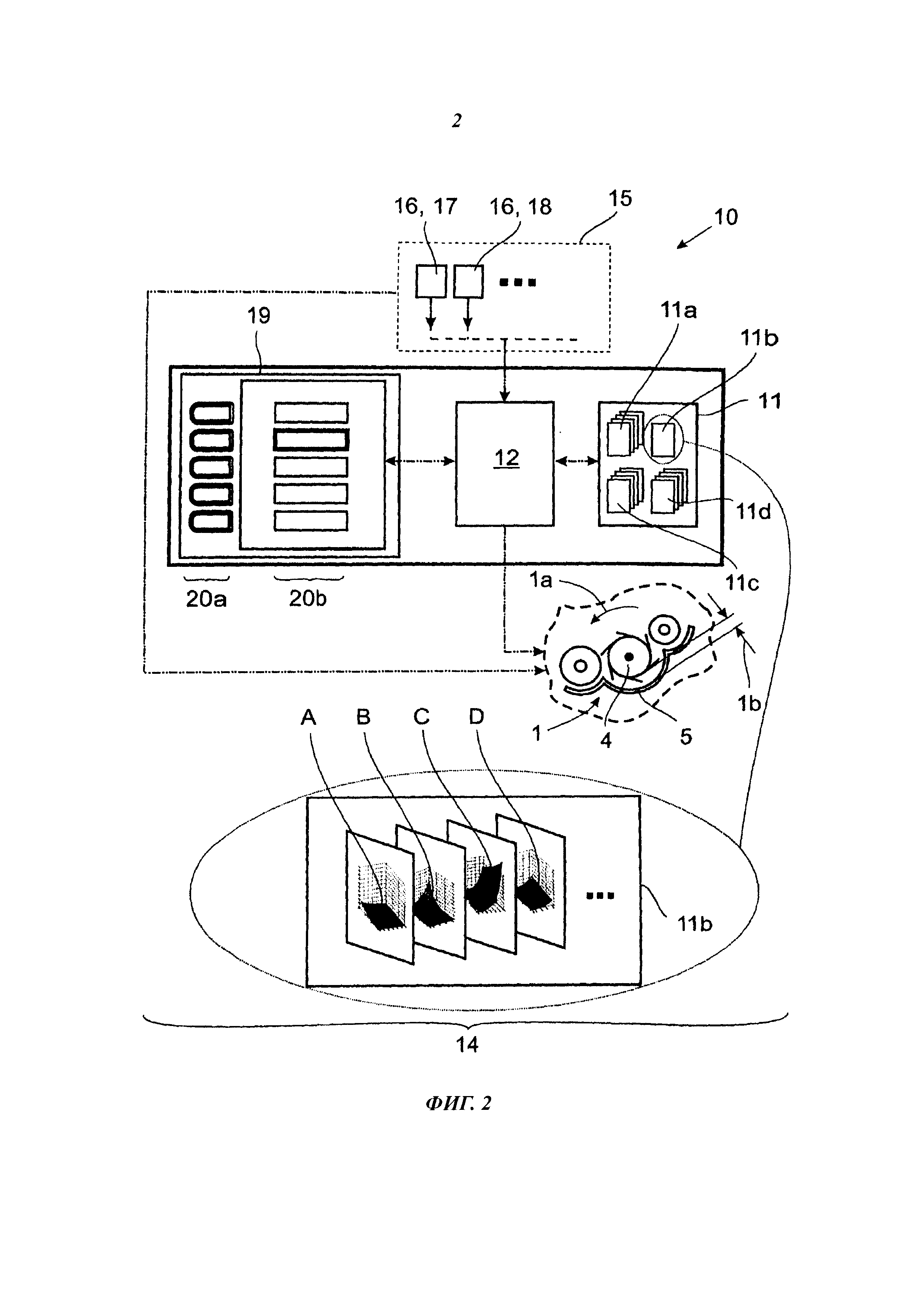
фиг. 2 изображает схему системы содействия водителю предлагаемого зерноуборочного комбайна,
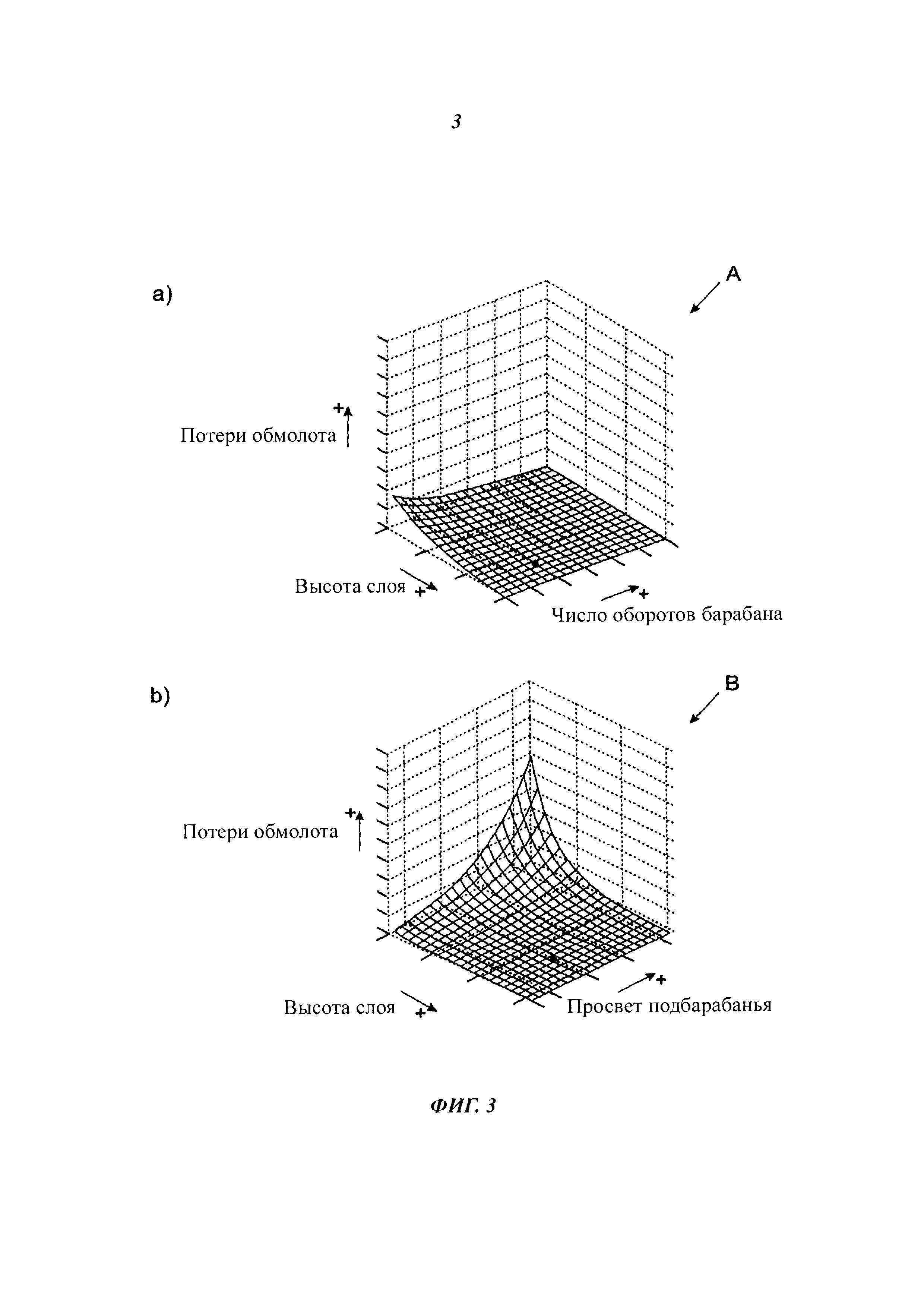
фиг. 3 изображает два поля характеристических кривых с выходными величинами «потери обмолота» и входными величинами а) «высота слоя» и «число оборотов барабана» и b) «высота слоя» и «просвет подбарабанья»,
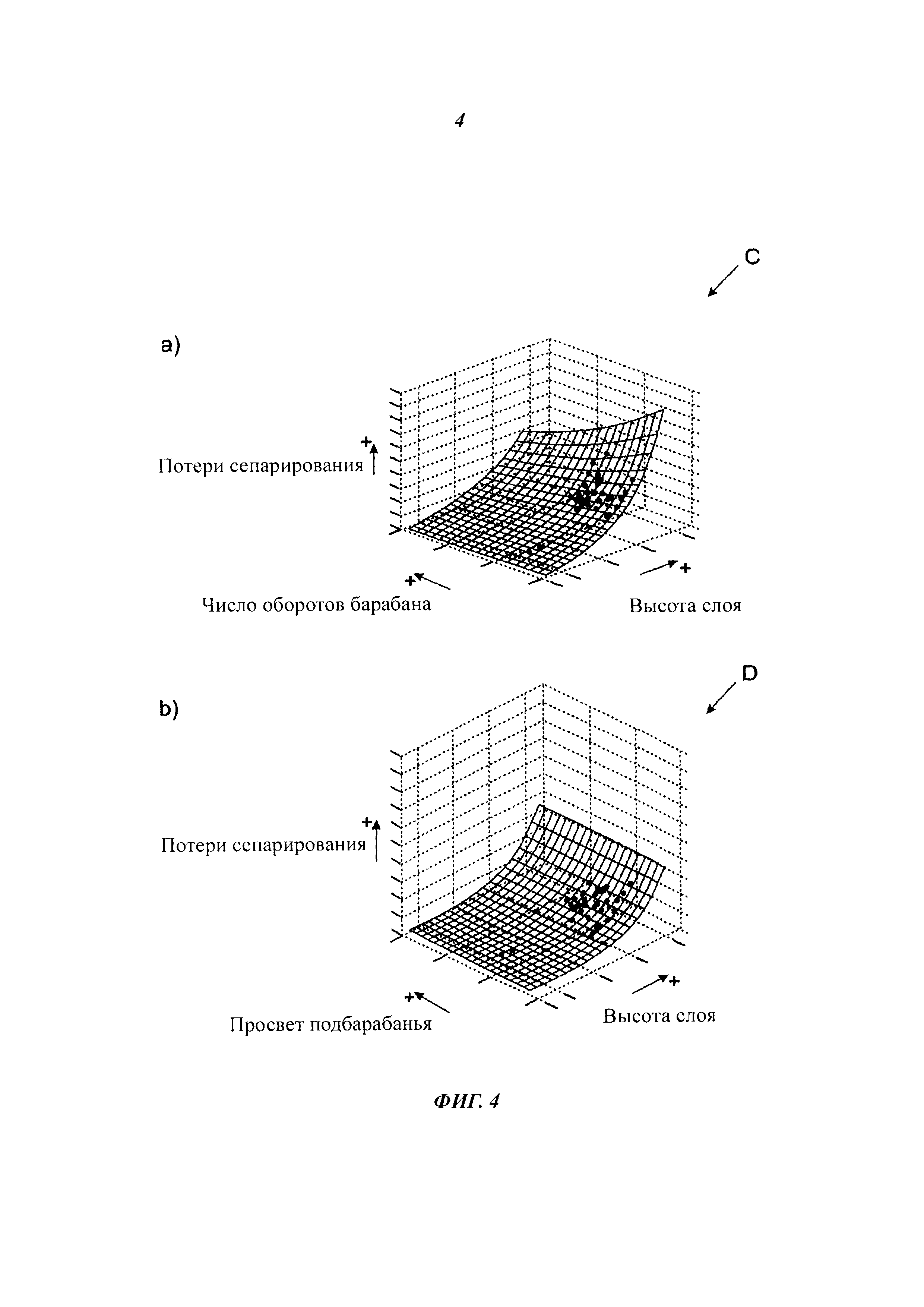
фиг. 4 изображает два поля характеристических кривых с выходными величинами «потери сепарирования» и входными величинами а) «высота слоя» и «число оборотов барабана» и b) «высота слоя» и «просвет подбарабанья»,
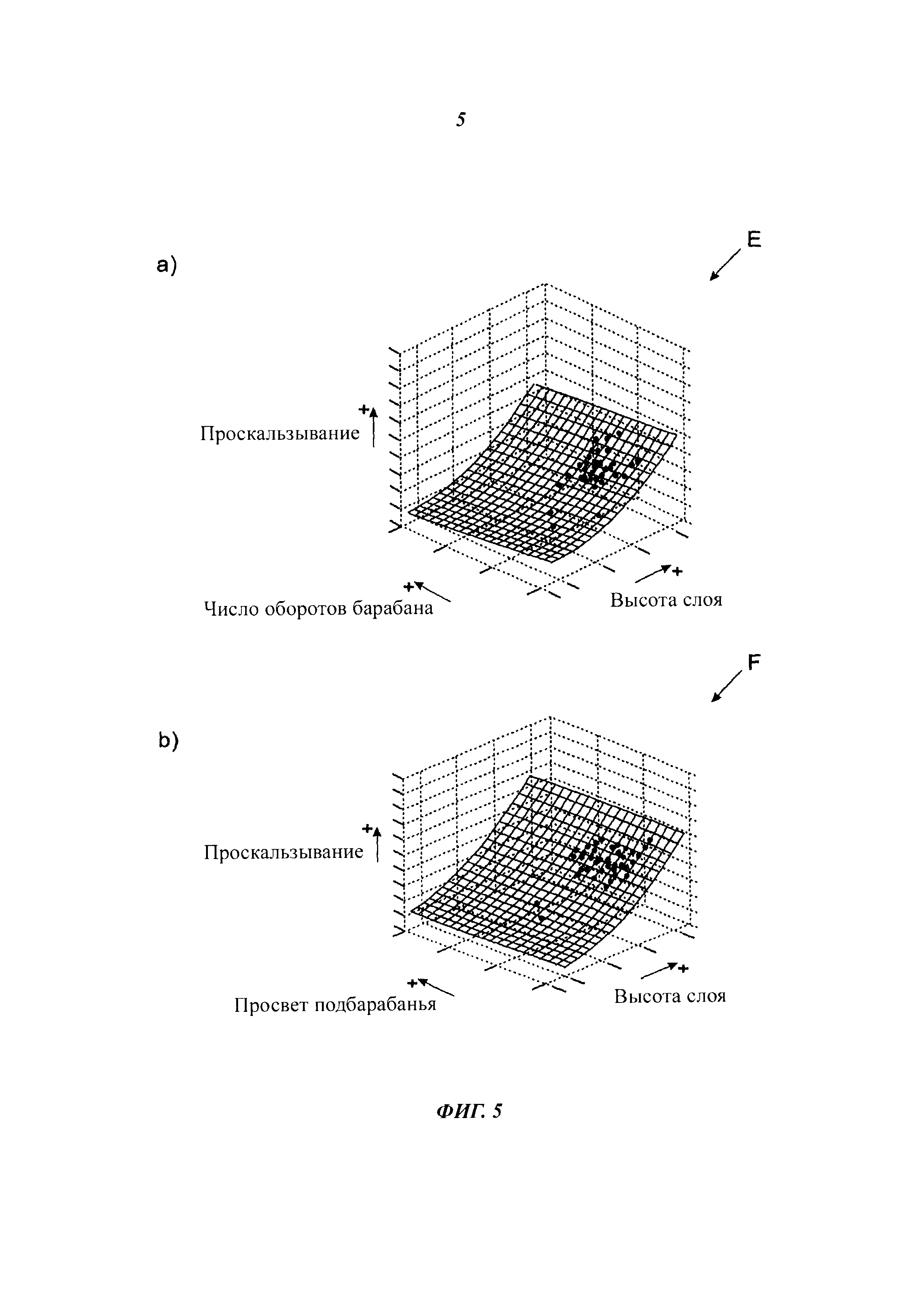
фиг. 5 изображает два поля характеристических кривых с выходными величинами «привод молотильного аппарата с проскальзыванием» и входными величинами а) «высота слоя» и «число оборотов барабана» и b) «высота слоя» и «просвет подбарабанья»,
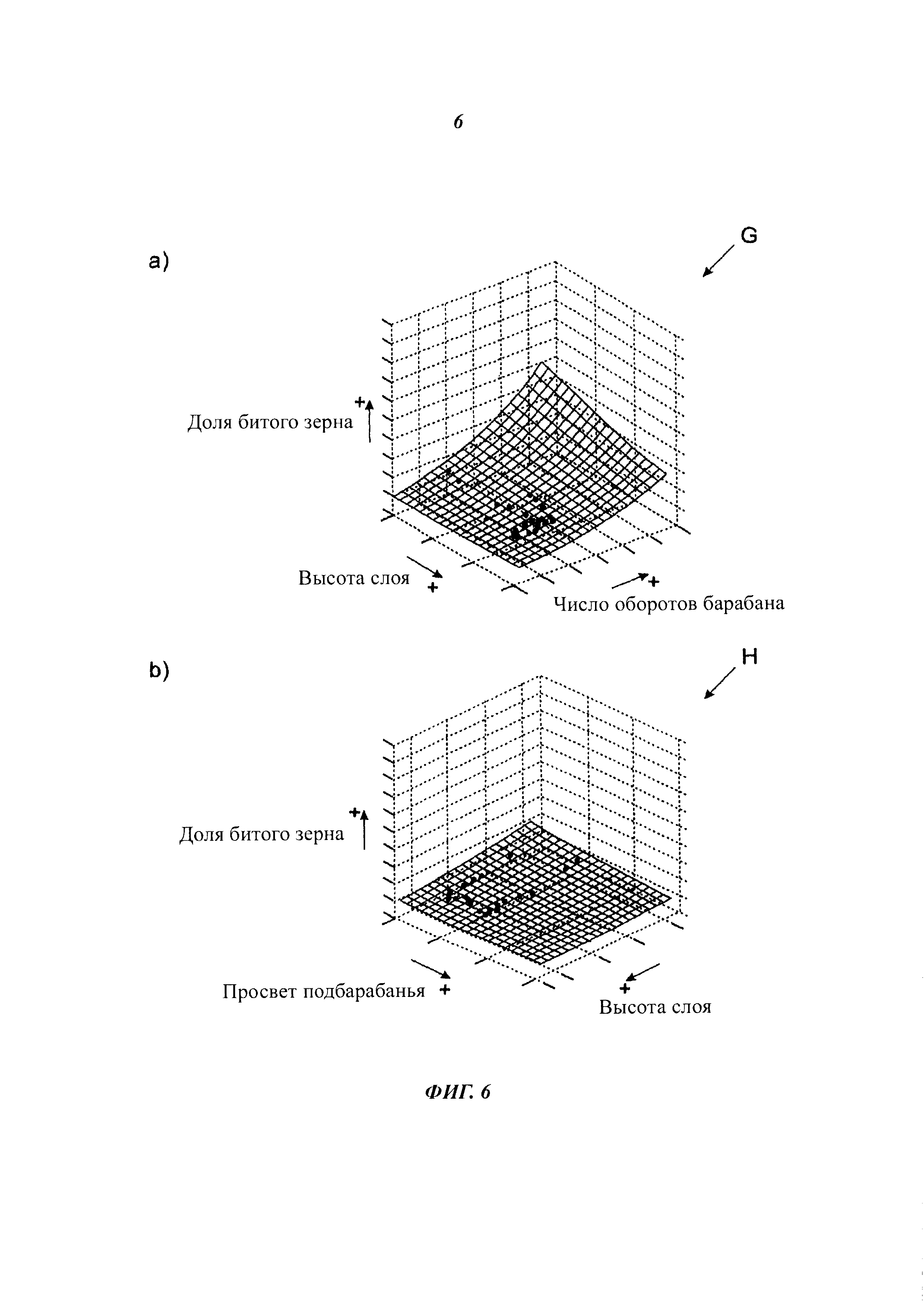
фиг. 6 изображает два поля характеристических кривых с выходными величинами «доля битого зерна» и входными величинами а) «высота слоя» и «число оборотов барабана» и b) «высота слоя» и «просвет подбарабанья»,
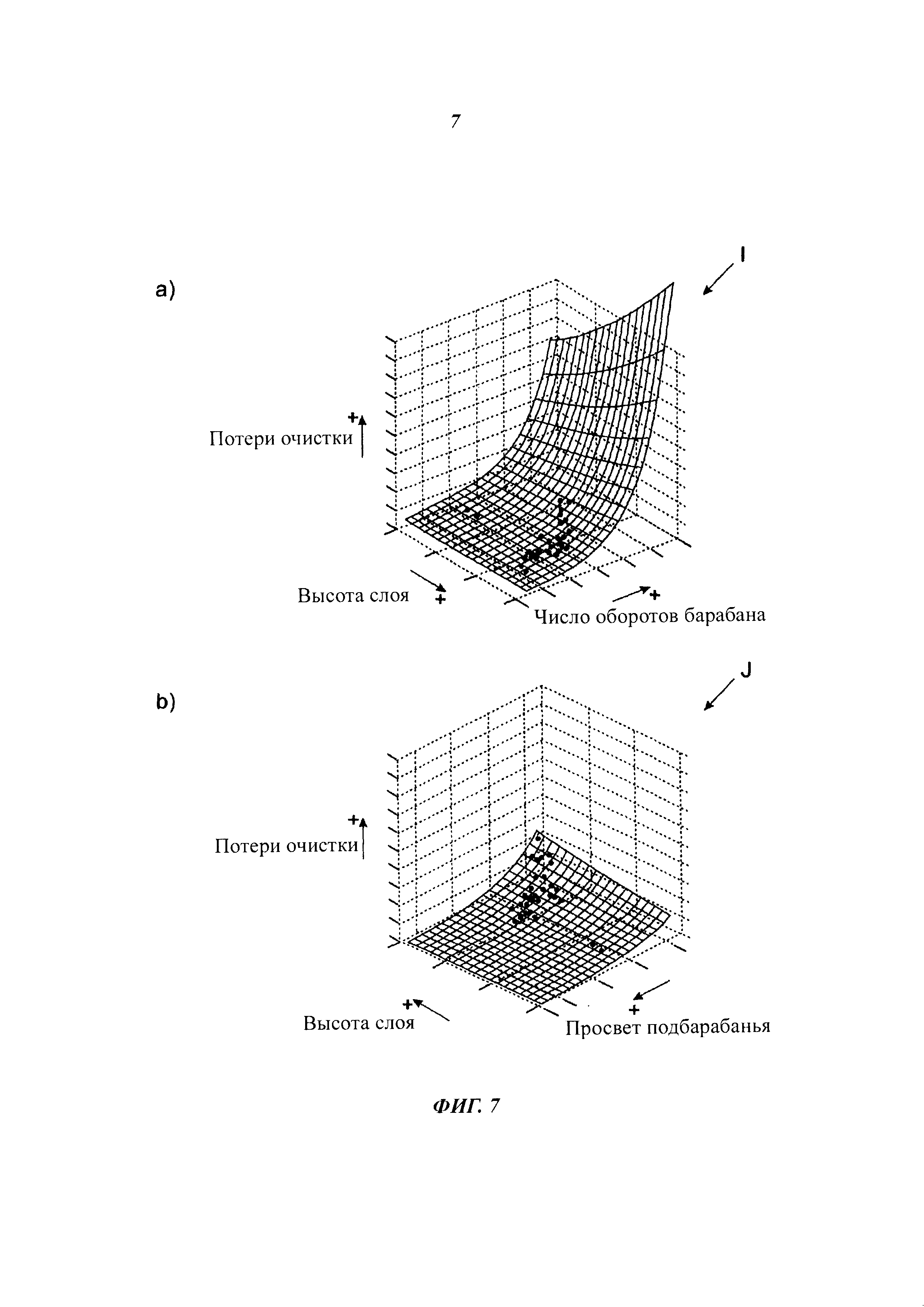
фиг. 7 изображает два поля характеристических кривых с выходными величинами «потери очистки» и входными величинами а) «высота слоя» «число оборотов барабана» и b) «высота слоя» и «просвет подбарабанья»,
Осуществление изобретения
Предлагаемый зерноуборочный комбайн содержит молотильный аппарат 1 для обмолота принимаемой убранной массы и получения зерновой массы. При этом под убранной массой следует понимать весь собранный с поля и подаваемый к молотильному аппарату 1 материал, а зерновой массой обозначается зерно, полученное зерноуборочным комбайном из убранной массы. Как видно из фиг. 1, полевая растительность скашивается жатвенным аппаратом 2 комбайна, а принятая убранная масса подается наклонным питателем 3 к молотильному аппарату 1.
Молотильный аппарат 1 оснащен молотильным барабаном 4, который взаимодействует с подбарабаньем 5. По ходу процесса за молотильным аппаратом 1 установлено сепарирующее устройство 6. Таким образом, подаваемый к молотильному аппарату 1 поток убранной массы далее, - без извлеченной из него зерновой массы, - подается к сепарирующему устройству 6.
В принципе молотильный аппарат 1 служит для извлечения трением преимущественной части зерновой массы из соломы убранной массы в ходе процесса обмолота. После этого в сепарирующем устройстве 6 убранная масса с еще оставшимся в ней зерном перемещается, например, встряхивается таким образом, что оставшаяся зерновая масса выделяется из соломы и остальной убранной массы. Затем зерновая масса, полученная в молотильном аппарате 1 и в сепарирующем устройстве 6, подается к очистному устройству 7. В очистном устройстве 7, которое обычно бывает многоступенчатым, от зерновой массы отделяются подаваемые вместе с ней фракции, например, полова и соломенная труха, а также необмолоченный материал, такой как верхушки колосьев или ости зерен. В заключение очищенная зерновая масса поступает по транспортирующему устройству 9, например, зерновому элеватору, в зерновой бункер 9а. Вымолоченная солома, - то есть убранная масса, оставшаяся в сепарирующем устройстве 6, - выгружается из комбайна, например, в виде валка вдоль колеи движения.
Молотильный аппарат 1 может управляться посредством задания различных машинных параметров. В зависимости от конструкции молотильного аппарата 1 к ним относятся эксплуатационные параметры, такие как число 1а оборотов барабана или другие числовые характеристики движения молотильного барабана 4, а также просвет 1b подбарабанья, то есть расстояние между молотильным барабаном 4 и подбарабаньем 5. Если молотильный аппарат 1 содержит шасталки для очистки зерна от остей, они могут также быть представлены в параметрах настройки молотильного аппарата 1.
Далее, предлагаемый зерноуборочный комбайн содержит систему 10 содействия водителю для настройки молотильного аппарата 1. Система 10 содействия водителю содержит память 11 для записи данных, - то есть память в информационном отношении, - и процессор 12 для обработки записанных в памяти 11 данных. В принципе система 10 содействия водителю выполнена таким образом, чтобы оказывать содействие водителю 13 при управлении зерноуборочным комбайном. Система 10 содействия водителю с памятью 11 и процессором 12 схематично показана на фиг. 2.
Существенно то, что молотильный аппарат 1 совместно с системой 10 содействия водителю образует молотильный автомат 14. Согласно изобретению это осуществлено посредством того, что в памяти 11 записаны множество выбираемых стратегий 11а процесса уборки, а процессор 12 выполнен с возможностью того, чтобы для реализации выбранной стратегии 11а или стратегий 11а процесса уборки самостоятельно определять по меньшей мере один машинный параметр для молотильного аппарата 1 и задавать его для молотильного аппарата 1. Машинные параметры для молотильного аппарата 1 будут здесь называться «параметрами молотильного аппарата». Таким путем создается молотильный автомат 14, который координировано регулирует все величины, существенные для работы молотильного аппарата 1. При этом, в частности, устраняется посторонняя конкурирующая настройка, действующая противоположным образом. В отличие от этого настройка всех существенных параметров осуществляется «от одной руки». Водитель 13 может также задавать желаемый результат качества, и ему не требуется экспертных знаний для ввода требуемых подробностей для достижения этого результата.
При определении параметров молотильного аппарата речь идет о самостоятельном определении, так как в принципе стратегия 11а процесса уборки реализуется процессором 12 без необходимости вмешательства водителя 13 или направления ему запроса при определении параметров 1а, 1b в более узком смысле. Такое вмешательство водителя 13 в принципе возможно, но не необходимо. При этом записанные стратегии 11а процесса уборки отличаются заданием цели или оптимизацией параметров процесса уборки, как это будет описано дальше.
Следует отметить, что в принципе система 10 содействия водителю может быть выполнена централизованной. При этом она служит для настройки не только молотильного аппарата 1, но также расположенных перед ним и за ним рабочих органов, таких как жатвенный аппарат 2, наклонный питатель 3, сепарирующее устройство 6, очистное устройство 7 и разбрасыватель 8. Однако в принципе возможна также децентрализованная структура системы 10 содействия водителю, состоящая из ряда отдельных систем управления. В этом случае может быть, например, предусмотрено, что по меньшей мере часть рабочих органов комбайна снабжена относящейся к ним децентрализованной системой управления.
В памяти 11 системы 10 содействия водителю записана функциональная системная модель 11b по меньшей мере для одной части зерноуборочного комбайна, при этом процессор 12 выполнен с возможностью самостоятельного определения по меньшей мере одного параметра 1а, 1b молотильного аппарата на основе системной модели 11b.
Функциональной системной моделью 11b является вычислительная модель для отображения функциональных взаимосвязей внутри комбайна. Примеры таких функциональных взаимосвязей будут описаны ниже.
Предпочтительно в ходе процесса уборки системная модель 11b настраивается процессором 12 на действительное состояние процесса уборки. Это означает, что процессор 12 проверяет, соответствуют ли отраженные в системной модели 11b функциональные взаимосвязи действительному состоянию процесса уборки. При этой проверке при выявлении отклонений процессор 12 предпринимает соответствующее изменение системной модели 11b. В особенно предпочтительном примере осуществления эта настройка выполняется циклически, причем для широкого понимания термина «циклически» следует обратиться в общему разделу описания.
В предпочтительном примере осуществления в ходе периодического способа процессор 12 настраивает системную модель 11b на действительное состояние процесса уборки и записывает системную модель 11b в память 11. Это осуществляется путем того, что при настройке учитывается системная модель 11b, записанная в памяти перед настройкой. Таким образом, предусмотрена пошаговая настройка системной модели 11b.
Для быстрого реагирования комбайна на изменяющиеся состояния процесса уборки предпочтительно предусмотрено, что процессор 12 определяет параметры молотильного аппарата циклически в указанном смысле. В этом отношении также следует понимать термин «циклически» в широком смысле.
Как было указано выше, понятие «состояние процесса уборки» охватывает все данные, относящиеся к процессу уборки. К нему относятся данные полевой растительности, такие как «густота растительности», «возможность обмолота растительности» и «влажность растительности». Далее, к нему относится параметр процесса уборки «потери обмолота» как величина не обмолоченного, выложенного на поле зерна; параметр процесса уборки «доля битого зерна» как величина уложенного в зерновой бункер дробленого зерна; параметр процесса уборки «высота слоя» как величина расхода; параметр процесса уборки «потери сепарирования» как величина зерна, выложенного на поле от сепарирующего устройства 6; параметр процесса уборки «потери очистки» как величина зерна, выложенного на поле от очистного устройства 7; параметр процесса уборки «проскальзывание привода молотильного аппарата» как величина нагрузки молотильного аппарата и параметр процесса уборки «потребление топлива» как величина энергопотребления привода молотильного аппарата. И наконец, к нему относятся параметры молотильного аппарата, такие как «число оборотов барабана» и «просвет подбарабанья», а также данные окружающей среды, такие как «температура окружающей среды» и «влажность окружающей среды». Все эти относящиеся к состоянию процесса уборки данные могут определяться различным образом.
В отношении термина «высота слоя» следует отметить, что он имеет широкое значение и охватывает как в более узком смысле высоту слоя потока убранной массы, принимаемого молотильным аппаратом, так и расход потока убранной массы, проходящего через молотильный аппарат 1. Таким образом, все выражения относятся как к высоте слоя, так и к расходу. В частности, термин «высота слоя» может быть заменен на термин «расход».
В предпочтительно примере осуществления предусмотрена система 15 датчиков для восприятия по меньшей мере части текущего состояния процесса уборки. Предпочтительно система 15 датчиков оснащена несколькими датчиками 16. Так например, система 15 датчиков содержит датчик 17 зерновой массы для восприятия информации о зерновой массе. При этом согласно фиг. 1 датчик 17 зерновой массы может быть выполнен в виде камеры для съемки зерновой массы. Датчик 17 зерновой массы может быть выполнен, в частности, с возможностью восприятия указанной выше доли битого зерна, доли не содержащих зерна фракций, доли остей колосьев и/или доли верхушек колосьев. Для этого потенциально состоящий из нескольких компонентов датчик 17 зерновой массы может быть направлен в зерновой бункер 9а и/или в транспортирующее устройство 9 комбайна.
Альтернативно или дополнительно, как это также показано на фиг. 1, система 15 датчиков может содержать датчик 18 валка для восприятия данных валка. При соответствующем выполнении датчик 18 валка может использоваться для восприятия доли зерна в валке. Эта доля зерна представляет потерю зерновой массы.
Альтернативно восприятию состояния процесса уборки с помощью системы 15 датчиков для системы 10 содействия водителю может быть также предусмотрено устройство 19 ввода/вывода, причем по меньшей мере часть состояния процесса уборки может быть введена через устройство 19 ввода/вывода. При этом предпочтительно процессор 12 генерирует запрос относительно действительного состояния процесса уборки и выдает его на устройство 19 ввода/вывода. В ответ на этот запрос водитель 13 может ввести через устройство 19 ввода/вывода по меньшей мере часть состояния процесса уборки. Для этого устройство 19 ввода/вывода содержит соответствующие элементы 20а ввода и элементы 20b вывода.
Предпочтительно такой запрос заключается в том, является ли полевая растительность «легкой для обмолота», «нормальной для обмолота» или «трудной для обмолота». В простейшем случае водителю 13 предоставляется выбор из предварительно определенных ответов.
Как было описано выше, предпочтительно системная модель 11b циклически настраивается на действительное состояние процесса уборки. В качестве начальной величины для системной модели в памяти 11 записана по меньшей мере одна исходная модель 11с, причем при первом определении по меньшей мере одного параметра молотильного аппарата процессор 12 предпринимает определение на основе исходной модели 11с. Формулировка «первое определение» относится к ситуации начала эксплуатации на уборке, в которой настройка системной модели 11b еще не предпринималась.
В особенно предпочтительном примере осуществления в памяти 11 записаны по меньшей мере две исходные модели 11с, причем процессор 12 в зависимости от текущего состояния процесса уборки выбирает исходную модель 11с, на основе которой вначале производится последующее определение параметров молотильного аппарата.
Описываемые здесь выбираемые водителем 13 стратегии 11а процесса уборки направлены на задание различных целей. В первом варианте по меньшей мере одна стратегия 11а процесса уборки направлена на задание цели настройки или оптимизации по меньшей мере одного параметра процесса уборки, такого как «потери обмолота», «доля битого зерна», «потери сепарирования», «потери очистки», «проскальзывание привода молотильного аппарата», «потребление топлива», или другого параметра. При этом реализация стратегий 11а должна осуществляться посредством соответствующего задания параметров молотильного аппарата, здесь и предпочтительно посредством управления главными параметрами молотильного аппарата 1 «число оборотов барабана» и «просвет подбарабанья».
Предпочтительно системная модель 11b образует по меньшей мере часть функциональных взаимосвязей между параметром процесса уборки и по меньшей мере одним другим параметром, здесь и предпочтительно параметром молотильного аппарата, таким как «число оборотов барабана» и «просвет подбарабанья» и/или по меньшей мере одним другим параметром процесса уборки, таким как представляющая расход «толщина слоя».
Для отображения функциональных взаимосвязей для по меньшей мере одного параметра процесса уборки предназначено по меньшей мере одно поле A-J характеристических кривых, причем здесь этот параметр процесса уборки определен как выходная величина по меньшей мере одного поля A-J характеристических кривых.
В особенно предпочтительном примере осуществления, показанном на фиг. 3-7, в качестве входных величин для по меньшей мере одного поля A-J характеристических кривых определены параметр процесса уборки «высота слоя» и параметр молотильного аппарата «число оборотов барабана» или параметр молотильного аппарата «просвет подбарабанья».
Для отображения функциональных взаимосвязей между параметром процесса уборки в качестве выходной величины и различными входными величинами для этого параметра процесса уборки предназначены первое поле характеристических кривых и второе поле характеристических кривых. При этом для первого поля А, С, Е, G, I характеристических кривых дополнительный параметр процесса уборки «высота слоя» и параметр молотильного аппарата «число оборотов барабана» образуют входные величины (фиг. 3а)-7а)), а для второго поля В, D, F, Н, J дополнительный параметр процесса уборки «высота слоя» и параметр молотильного аппарата «просвет подбарабанья» образуют входные величины (фиг. 3b)-7b)).
На фиг. 3а) показано поле А характеристических кривых для функциональной взаимосвязи между выходной величиной «потери обмолота» и входными величинами «высота слоя» и «число оборотов барабана». Из него следует, что обмолот тем лучше, чем выше представляющая расход величина высоты слоя и чем выше число оборотов молотильного барабана.
На фиг. 3b) показано поле В характеристических кривых для функциональной взаимосвязи между выходной величиной «потери обмолота» и входными величинами «высота слоя» и «просвет подбарабанья». Из него следует, что обмолот тем лучше, чем выше представляющая расход входная высота слоя и чем меньше просвет подбарабанья.
На фиг. 4а) показано поле С характеристических кривых для функциональной взаимосвязи между выходной величиной «потери сепарирования» и входными величинами «высота слоя» и «число оборотов барабана». Из него следует, что при увеличении представляющей расход высоты слоя и снижении числа оборотов молотильного барабана потери сепарирования увеличиваются, то есть сепарирование ухудшается.
На фиг. 4b) показано поле D характеристических кривых для функциональной взаимосвязи между выходной величиной «потери сепарирования» и входными величинами «высота слоя» и «просвет подбарабанья». Из него следует, что при увеличении представляющей расход высоты слоя и увеличении просвета подбарабанья потери сепарирования увеличиваются.
На фиг. 5а) показано поле Е характеристических кривых для функциональной взаимосвязи между представляющей нагрузку молотильного аппарата выходной величиной «проскальзывание привода молотильного аппарата» и входными величинами «высота слоя» и «число оборотов барабана». Из него следует, что при увеличении представляющей расход высоты слоя и снижении числа оборотов барабана нагрузка молотильного аппарата, здесь проскальзывание приводной трансмиссии молотильного аппарата, возрастает.
На фиг. 5b) показано поле F характеристических кривых для функциональной взаимосвязи между выходной величиной «проскальзывание привода молотильного аппарата» и входными величинами «высота слоя» и «просвет подбарабанья». Из него следует, что при увеличении высоты слоя и уменьшении просвета подбарабанья проскальзывание привода молотильного аппарата, возрастает.
На фиг. 6а) показано поле G характеристических кривых для функциональной взаимосвязи между выходной величиной «доля битого зерна» и входными величинами «высота слоя» и «число оборотов барабана». Из него следует, что при увеличении числа 1а оборотов барабана и снижении представляющей расход высоты слоя доля битого зерна возрастает.
На фиг. 6b) показано поле Н характеристических кривых для функциональной взаимосвязи между выходной величиной «доля битого зерна» и входными величинами «высота слоя» и «просвет подбарабанья». Из него следует, что при снижении представляющей расход высоты слоя и уменьшении просвета подбарабанья доля битого зерна возрастает.
На фиг. 7а) показано поле I характеристических кривых для функциональной взаимосвязи между выходной величиной «потери очистки» и входными величинами «высота слоя» и «число оборотов барабана». Из него следует, что при увеличении числа 1а оборотов барабана и увеличении представляющей расход высоты слоя потери очистки возрастают.
На фиг. 7b) показано поле J характеристических кривых для функциональной взаимосвязи между выходной величиной «потери очистки» и входными величинами «высота слоя» и «просвет подбарабанья». Из него следует, что при уменьшении просвета 1b подбарабанья и увеличении представляющей расход высоты слоя потери очистки возрастают.
Следует учитывать, что при изображении полей A-J характеристических кривых на фиг. 3-7 масштаб выходной величины на изображениях а) и b) одинаков. Из этого следует, что в зависимости от текущей входной величины настройка выходной величины может быть предпринята главным образом с помощью числа 1а оборотов барабана или главным образом с помощью просвета 1b подбарабанья. Далее, из изображения полей A-J характеристических кривых на фиг. 3-7 следует, что различные стратегии настройки или оптимизации выходных величин могут конкурировать друг с другом. Это имеет особое значение, в частности, для примеров осуществления, которые будут описаны ниже.
В принципе может быть предусмотрено, что для определения по меньшей мере одного параметра процесса уборки процессор 12 всегда берет за основу одно и то же поле A-J характеристических кривых с его модификацией в соответствии с описанной выше настройкой. Однако предпочтительно процессор 12 выбирает по меньшей мере одно поле A-J характеристических кривых в зависимости от действительного состояния процесса уборки и берет его за основу при определении по меньшей мере одного параметра молотильного аппарата. За счет этого при соответствующем выборе поля A-J характеристических кривых можно обеспечивать реагирование, например, на изменение влажности растительности или другого параметра.
Описанная выше настройка системной модели 11b на действительное состояние процесса уборки для случая системной модели 11b по меньшей мере с одним полем A-J характеристических кривых предпочтительно осуществляется посредством того, что процессор 12 в ходе работы на уборке циклически настраивает по меньшей мере одно поле A-J характеристических кривых на процесс уборки. В качестве стартовой величины с опорой на исходную модель 11с в памяти 11 записано по меньшей мере одно исходное поле характеристических кривых, причем при первом определении по меньшей мере одного параметра молотильного аппарата процессор 12 предпринимает это определение по меньшей мере одного параметра молотильного аппарата на основе исходного поля 11с характеристических кривых. На фиг. 3-7 в диаграммы внесен ряд реальных измеренных датчиками величин для соответствующего состояния процесса уборки. При указанной настройке процессор 12 предпринимает изменение конкретного поля A-J характеристических кривых для его приближения к реальным измеренным датчиками величинам. При этом, например, все поле A-J характеристических кривых может быть смещено в направлении к текущей выходной величине, вверх или вниз на фиг. 3-7. Однако наиболее предпочтительно, когда приближение поля A-J характеристических кривых влечет за собой также изменение хода характеристических кривых.
Для реализации стратегии 11а посредством процессора 12 в памяти 11 записана по меньшей мере одна инструкция 11d по реализации. Для инструкции 11d по реализации возможны различные дающие преимущества варианты. В первом варианте предусмотрено, что инструкция 11d по реализации предусматривает определение по меньшей мере одного параметра молотильного аппарата в процессе управления, а не в процессе регулирования. При этом предпочтительно процессор 12 работает для определения по меньшей мере одного параметра молотильного аппарата путем управления полем характеристических кривых. Таким образом, при определении по меньшей мере одного параметра молотильного аппарата не предусмотрено регулирующей обратной связи. Реагирование процессора 12 на изменение состояния процесса уборки производится только при описанной настройке системной модели 11b на текущее действительное состояние процесса уборки. Этот основной принцип управления молотильным аппаратом 1 приводит к упрощению определения параметра молотильного аппарата из-за отсутствия обратной связи регулирования. За счет этого создается возможность реализовать даже сложные функциональные взаимосвязи, в частности, конкурирующие стратегии с низкими затратами вычислений и времени, как это будет пояснено дальше.
Конкурирующие стратегии могут создаваться за счет того, что по меньшей мере одна выбираемая стратегия 11а процесса уборки содержит по меньшей мере две частичные стратегии, которые конкурируют друг с другом в отношении одного и того же параметра молотильного аппарата. В этой связи вторая возможность состоит в том, что по меньшей мере две выбираемые стратегии процесса уборки как таковые конкурируют друг с другом в отношении одного и того же параметра молотильного аппарата. Так например, в примере осуществления по фиг. 3а) стратегия оптимизации потерь обмолота в процессе уборки, как правило, требует повышения числа оборотов барабана, тогда как в примере осуществления по фиг. 6а) стратегия оптимизации доли битого зерна требует снижения числа оборотов барабана. При этом исходят из того, что здесь оптимизация всегда относится к всемерному снижению потерь обмолота и доли битого зерна.
В таких ситуациях для реализации взаимно конкурирующих стратегий инструкция 11d по реализации предпочтительно содержит многоцелевую оптимизацию, при которой, например, может идти речь об оптимизации по методу Парето. Многоцелевая оптимизация может быть особенно легко реализована на основе системной модели 11b, предпочтительно на основе полей A-J характеристических кривых и предпочтительно при использовании указанного выше управления полем характеристических кривых.
В частности, при реализации конкурирующих друг с другом стратегий предусмотрено, что инструкция 11d по реализации содержит по меньшей мере одну предпосылку, на основе которой процессор 12 при самостоятельном определении по меньшей мере одного параметра молотильного аппарата присваивает приоритетность выбранным стратегиям 11а процесса уборки и/или частичным стратегиям выбранной стратегии 11а процесса уборки и/или подлежащим настройке или оптимизации параметрам процесса уборки и/или задаваемым параметрам молотильного аппарата.
При этом предпочтительная приоритетность состоит, например, в том, что процессор 12 всегда выдвигает настройку или оптимизацию доли битого зерна вперед по отношению к настройке или оптимизации потерь обмолота. Альтернативно или дополнительно предпочтительная приоритетность состоит, например, в том, что для настройки или оптимизации потерь обмолота задание просвета 1b подбарабанья является предпочтительным относительно задания числа оборотов 1а барабана. Другая приоритетность может предпочтительно состоять в том, что для настройки или оптимизации доли битого зерна задание числа оборотов 1а барабана является предпочтительным относительно задания просвета 1b подбарабанья.
Возможны также другие инструкции 11d по реализации, направленные на определенные отдельные случаи, имеющие на практике особое значение. Так например, для стратегии 11а процесса уборки настройки или оптимизации параметра процесса уборки «потери обмолота» инструкция по реализации состоит в том, что процессор 12 при уменьшении толщины слоя в молотильном аппарате 1 на основе системной модели 11b задает повышение числа 11а оборотов барабана и/или уменьшение просвета 1b подбарабанья.
И наконец, в этой связи возможно, что для стратегии 11а процесса уборки настройки или оптимизации параметра процесса уборки «потери сепарирования» инструкция 11d по реализации состоит в том, что процессор 12 при увеличении толщины слоя в молотильном аппарате 1 на основе системной модели 11b задает повышение числа 11а оборотов барабана.
Перечень позиций
1 Молотильный аппарат
1а Число оборотов барабана
1b Просвет подбарабанья
2 Жатвенный аппарат
3 Наклонный питатель
4 Молотильный барабан
5 Подбарабанье
6 Сепарирующее устройство
7 Очистное устройство
8 Разбрасыватель
9 Транспортирующее устройство
9а Зерновой бункер
10 Система содействия водителю
11 Память
11а Стратегия процесса уборки
11b Системная модель
11с Исходная модель
11d Инструкция по реализации
12 Процессор
13 Водитель
14 Молотильный автомат
15 Система датчиков
16 Датчик
17 Датчик зерновой массы
18 Датчик валка
19 Устройство ввода/вывода
20а Элементы ввода
20b Элементы вывода
A-J Поля характеристических кривых
Способ управления процессом обработки убранного материала в зерноуборочном комбайне и зерноуборочный комбайн
Сельскохозяйственное уборочное транспортное средство
Система и способ управления перегрузкой убранной массы
Комбайн с разбрасывателем для разбрасывания измельченной убранной массы
Сельскохозяйственное перевозочное транспортное средство и комплекс транспортных средств
Уборочная сельхозмашина
Система управления перегрузочным устройством
Зерновой комбайн с осевым сепаратором и способ эксплуатации такого комбайна
Сельскохозяйственная уборочная машина
Способ регулирования давления в шинах
Сельскохозяйственная рабочая машина с устройством отображения
Способ и устройство для разделения потока убранной массы сельскохозяйственного материала
Способ управления процессом перевалки
Способ определения целевого значения параметра управления рабочего агрегата уборочной сельхозмашины, устройство управления рабочим агрегатом и уборочная сельхозмашина
Зерноуборочный комбайн с системой помощи водителю
Способ и устройство управления уборочной сельхозмашиной
Самоходная уборочная сельхозмашина с устройством измерения потерь
Зерноуборочный комбайн
Самоходная уборочная машина
Сельскохозяйственная уборочная машина

