Результат интеллектуальной деятельности: ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ДАННЫМ ПЫЛЕСОСОМ
Вид РИД
Изобретение
Область техники
[1] Настоящее изобретение относится к пылесосу и способу управления таким пылесосом.
Уровень техники
[2] Вообще пылесосы представляют собой устройства, которые всасывают пыль и мусора, рассредоточенные на очищаемой поверхности, посредством использования двигателя пылесоса, установленного в корпусе так, чтобы фильтровать пыль и мусор в упомянутом корпусе.
[3] Такие пылесосы можно в принципе разделить на вертикальные, в которых всасывающее сопло, то есть всасывающее отверстие объединено с корпусом, и на контейнерные, в которых всасывающее сопло сообщается с корпусом через соединительную трубу.
[4] Пылесос раскрыт в корейской патентной публикации № 2010-0053098, опубликованной 20 мая 2010 г., которая является более ранним документом.
[5] Упомянутый пылесос включает содержит колесо для перемещения корпуса пылесоса и приводной узел для приведения в движение упомянутого колеса. Упомянутый пылесос обнаруживает вращательные и поступательные перемещения подвижного элемента для управления работой упомянутого приводного узла.
[6] В случае вышеописанного пылесоса, поскольку предлагается конструкция, в которой вращательные и поступательные перемещения подвижного элемента осуществляются одновременно, упомянутая конструкция может быть усложненной. К тому же, хотя приводной узел перемещается посредством обнаружения механической операции, действительное перемещение пользователя не может быть обнаружено надлежащим образом. А значит может быть трудно надлежащим образом перемещать корпус пылесоса к пользователю.
Раскрытие изобретения
Техническая задача
[7] Варианты осуществления предусматривают пылесос, в котором корпус пылесоса выполнен с возможностью надлежащего перемещения в направлении перемещения пользователя, и способ управления данным пылесосом.
[8] Варианты осуществления также предусматривают пылесос, в котором корпус пылесоса выполнен с возможностью обхода препятствия, при этом перемещаясь к пользователю, и способ управления данным пылесосом.
Решение задачи
[9] В одном варианте осуществления пылесос включает в себя: перемещающее устройство для перемещения; всасывающее устройство, соединенное с корпусом пылесоса, для всасывания пыли воздуха и направления всасываемой пыли и воздуха в корпус пылесоса, причем упомянутое всасывающее устройство содержит ручку; устройство обнаружения для определения расстояния между упомянутой ручкой и корпусом пылесоса; и контроллер, определяющий, необходимо ли перемещение корпуса пылесоса, на основе упомянутого расстояния между корпусом пылесоса и ручкой, причем упомянутый контроллер управляет упомянутым перемещающим устройством, когда перемещение корпуса пылесоса необходимо, и упомянутый контроллер управляет упомянутым подвижным устройством так, чтобы обеспечить при работе перемещающего устройства обход корпусом пылесоса препятствия, когда определено, что операция обхода препятствия необходима.
[10] Упомянутое перемещающее устройство может содержать множество колес и множество двигателей для вращения упомянутого множества колес.
[11] Упомянутый пылесос может дополнительно содержать датчики тока для измерения тока, вводимого в каждый из упомянутого множества двигателей, при этом контроллер способен определять, необходима ли операция для обхода препятствия, на основе упомянутого тока, измеряемого, по меньшей мере, одним датчиком тока из множества датчиков тока.
[12] Упомянутый контроллер способен определять, что операция для обхода препятствия необходима, когда ток, измеренный, по меньшей мере, одним датчиком тока из множества датчиков тока, превышает предельный ток, в то время как ток приложен к, по меньшей мере, одному двигателю из множества двигателей.
[13] Устройство обнаружения может содержать: ультразвуковой передающий узел, расположенный на упомянутом всасывающем устройстве, для передачи ультразвуковых волн; и ультразвуковой приемный узел, расположенный на корпусе пылесоса, для приема ультразвуковых волн, передаваемых упомянутым ультразвуковым передающим узлом, причем упомянутый контроллер способен определять, необходима ли операция для обхода препятствия, на основе интенсивности ультразвуковых волн, принимаемых ультразвуковым приемным узлом, и тока, измеренного, по меньшей мере, одним датчиком тока из множества датчиков тока.
[14] Контроллер способен определять, что операция для обхода препятствия необходима, если отношение тока, измеренного, по меньшей мере, одним датчиком тока, к интенсивности ультразвуковых волн меньше, чем опорное отношение.
[15] Пылесос может дополнительно содержать датчик препятствия, расположенный на корпусе пылесоса, для обнаружения препятствия, причем когда упомянутое препятствие обнаружено упомянутым датчиком препятствия, в то время как корпус пылесоса перемещается, упомянутый контроллер способен определять, что операция для обхода препятствия необходима.
[16] Контроллер способен приводить в действие упомянутое перемещающее устройство, чтобы обеспечить корпусу пылесоса перемещение назад для обхода корпусом пылесоса препятствия.
[17] Контроллер способен управлять перемещающим устройством так, что корпус пылесоса поворачивается налево или направо в положении, в котором корпус пылесоса перемещен назад на заданное расстояние от упомянутого препятствия.
[18] Контроллер способен приводить в действие перемещающее устройство так, чтобы обеспечить поворот корпуса пылесоса налево или направо при перемещении корпуса пылесоса назад для обхода корпусом пылесоса препятствия.
[19] После того как корпус пылесоса обошел препятствие, контроллер способен снова определять, необходимо ли перемещение корпуса пылесоса, на основе информации, определяемой устройством обнаружения.
[20] Согласно другому аспекту изобретения предложен способ управления пылесосом, который включает в себя: обнаружение перемещения всасывающего устройства с помощью устройства обнаружения; определение с помощью контроллера, необходимо ли перемещение корпуса пылесоса, соединенного с упомянутым всасывающим устройством, на основе расстояния между упомянутым всасывающим устройством и корпусом пылесоса; приведение в действие перемещающего устройства, расположенного на корпуса пылесоса, посредством упомянутого контроллера, если перемещение корпуса пылесоса необходимо; определение с помощью контроллера, необходима ли операция для обхода препятствия, при приведенном в действие перемещающем устройстве; и управление перемещающим устройством с помощью упомянутого контроллера, чтобы обеспечить обход корпусом пылесоса препятствия, если необходима операция обхода корпусом пылесоса препятствия.
[21] Перемещающее устройство может содержать множество колес и множество двигателей для приведения в движение множества колес, причем при управлении перемещающим устройством для обхода препятствия для перемещения корпуса пылесоса назад приводят в действие множество двигателей с одинаковой скоростью вращения.
[22] Перемещающее устройство может содержать множество колес и множество двигателей для приведения в движение множества колес, причем при управлении упомянутым перемещающим устройством для обхода препятствия для поворота перемещающегося назад корпуса пылесоса налево или направо приводят в действие множество двигателей с отличающимися друг от друга скоростями вращения.
[23] Способ может дополнительно включать в себя определение, необходима ли остановка корпуса пылесоса, если операция для обхода препятствия не является необходимой; и такое управление перемещающим устройством, чтобы обеспечить остановку корпуса пылесоса, если остановка корпуса пылесоса необходима.
[24] Перемещающее устройство может содержать множество колес и множество двигателей для приведения в движение множества колес, причем, при определении, необходима ли операция корпуса пылесоса для обхода препятствия, можно определять, необходима операция корпуса пылесоса для обхода препятствия, на основе тока, измеренного, по меньшей мере, одним датчиком тока из множества датчиков тока для измерения тока, приложенного к каждому из множества двигателей.
[25] При определении, необходима ли операция для обхода корпусом пылесоса препятствия, может быть определено, что операция для обхода препятствия необходима, если ток, измеренный, по меньшей мере, одним датчиком тока из множества датчиков тока превышает предельный ток.
Преимущества изобретения
[26] В соответствии с предлагаемым вариантом осуществления, поскольку корпус пылесоса перемещают так, чтобы отслеживать перемещение пользователя, пользователь может непосредственно не перемещать корпус пылесос, что повышает удобство пользователя.
[27] Кроме того, поскольку определяют, существует ли препятствие на пути перемещения корпуса пылесоса, чтобы обойти данное препятствие, корпус пылесоса может быть надлежащим образом перемещен в направлении перемещения пользователя.
[28] В частности, поскольку в при перемещении корпуса пылесоса определяют, существует ли препятствие или необходима ли операция для обхода препятствия, то скорость реакции корпуса пылесоса может быть быстрой, если необходимо перемещение пылесоса, и пылесос может надлежащим образом обходить препятствие.
Краткое описание чертежей
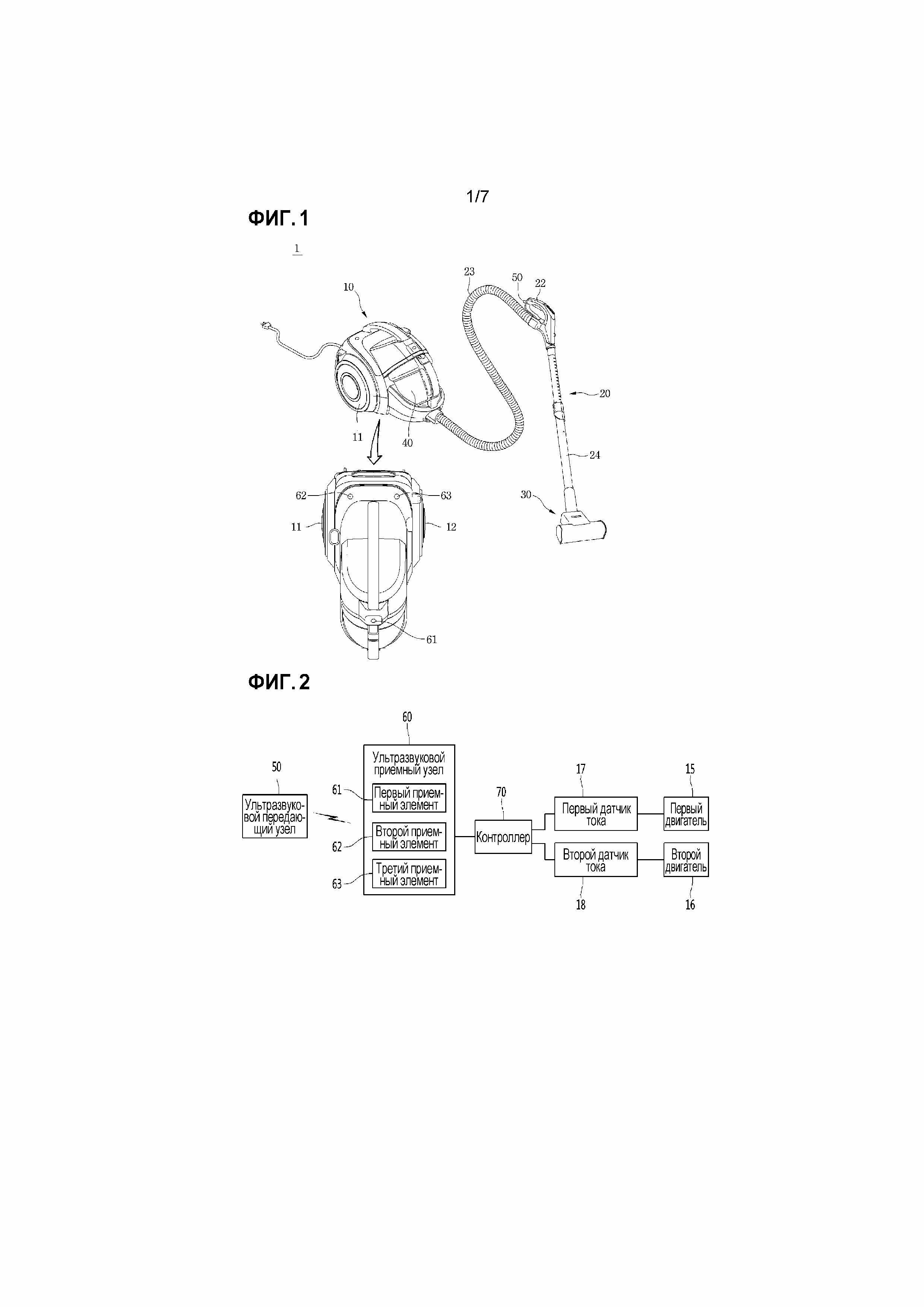
[29] Фиг.1 представляет собой перспективный вид пылесоса в соответствии с вариантом осуществления изобретения.
[30] Фиг.2 представляет собой блок-схему пылесоса в соответствии с вариантом осуществления изобретения.
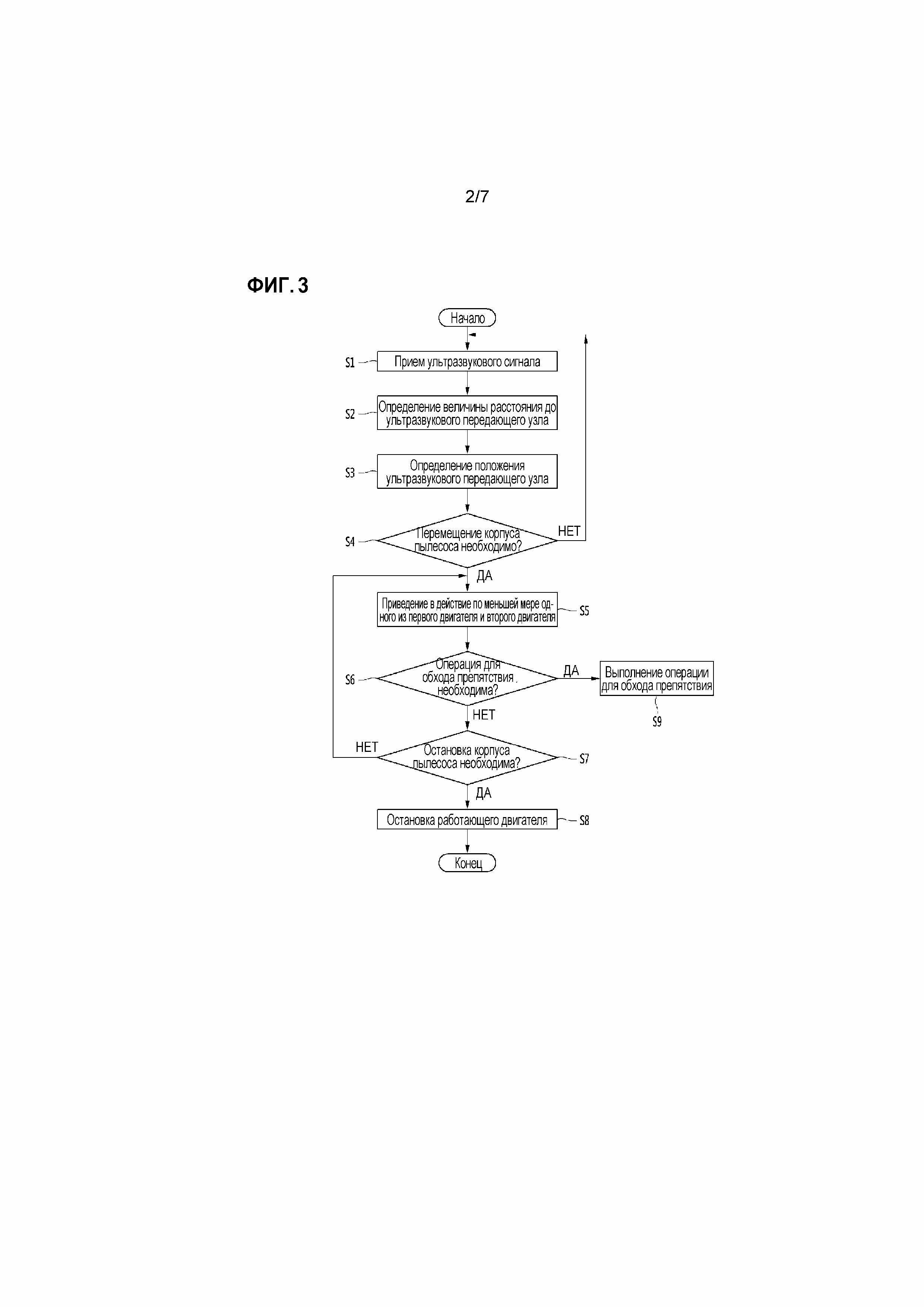
[31] Фиг.3 представляет собой блок-схему последовательности операций для объяснения способа управления пылесосом в соответствии с изобретением.
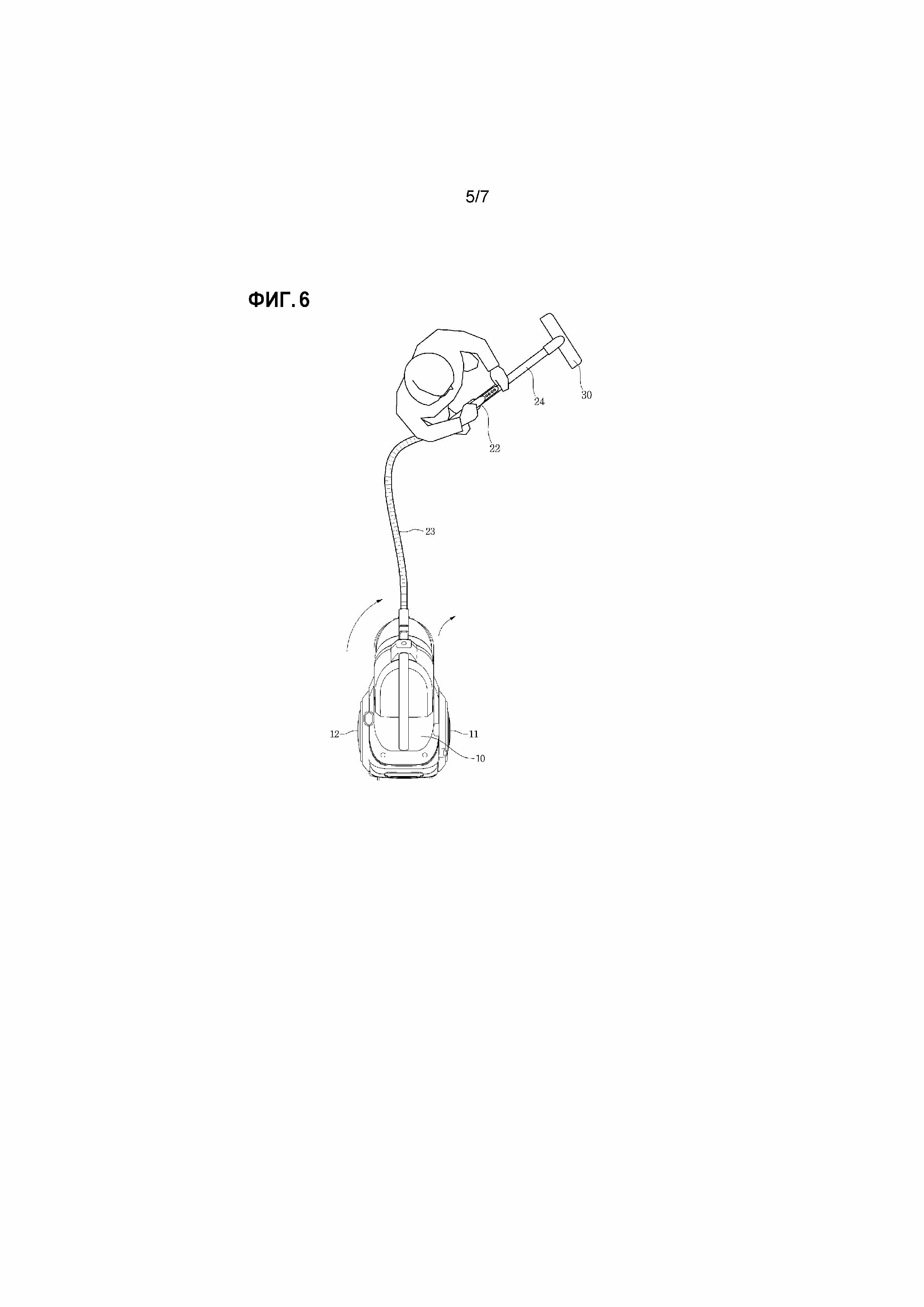
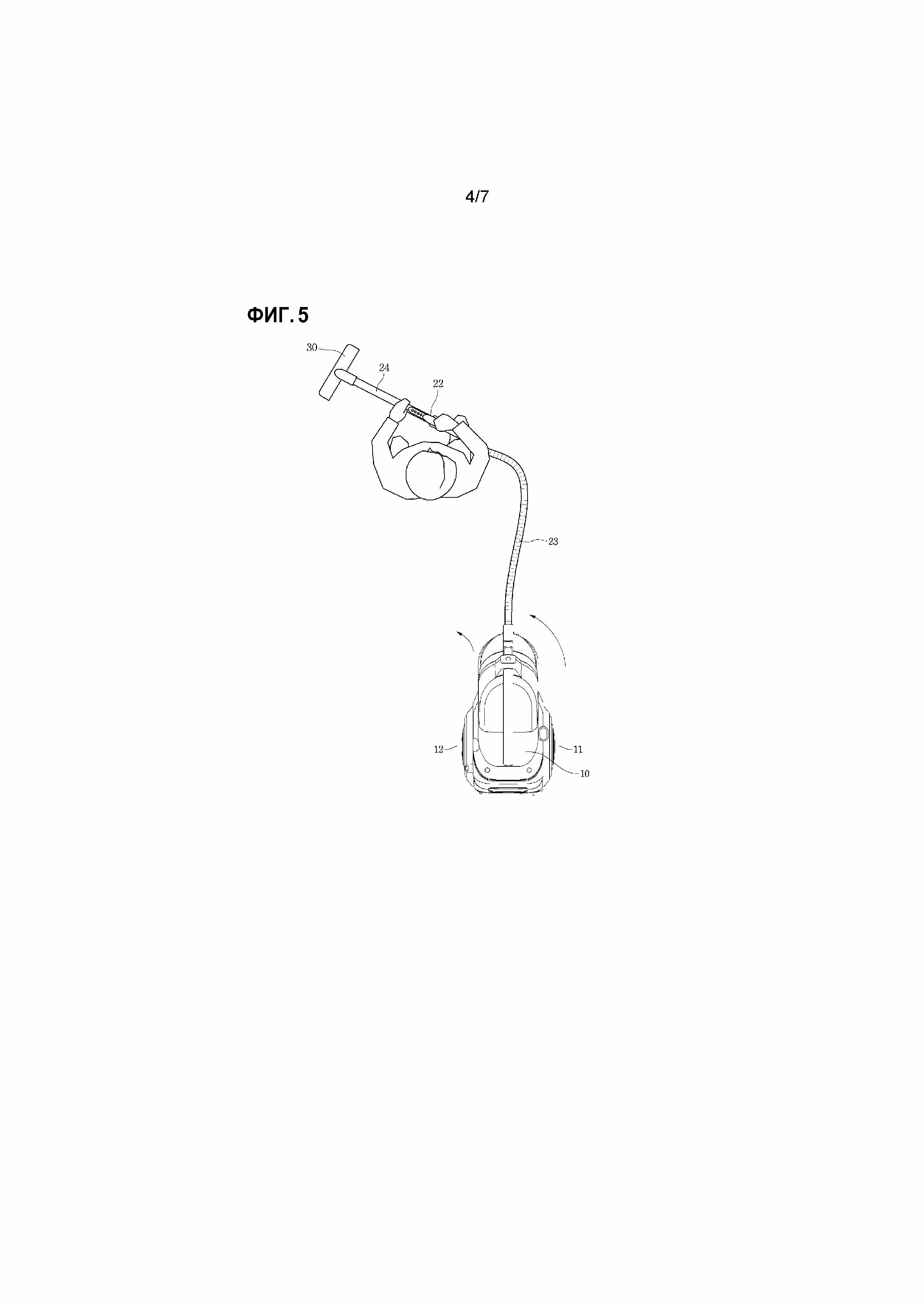
[32] Фин.4-6 представляют собой виды, показывающие положения, в которых корпус пылесоса перемещается так, чтобы отслеживать перемещение пользователя, причем фиг.4 представляет собой вид, показывающий положение, в котором корпус пылесоса перемещен вперед, фиг.5 представляет собой вид, показывающий положение, в котором корпус пылесоса повернут налево, и фиг.6 представляет собой вид, показывающий положение, в котором корпус пылесоса повернут направо.
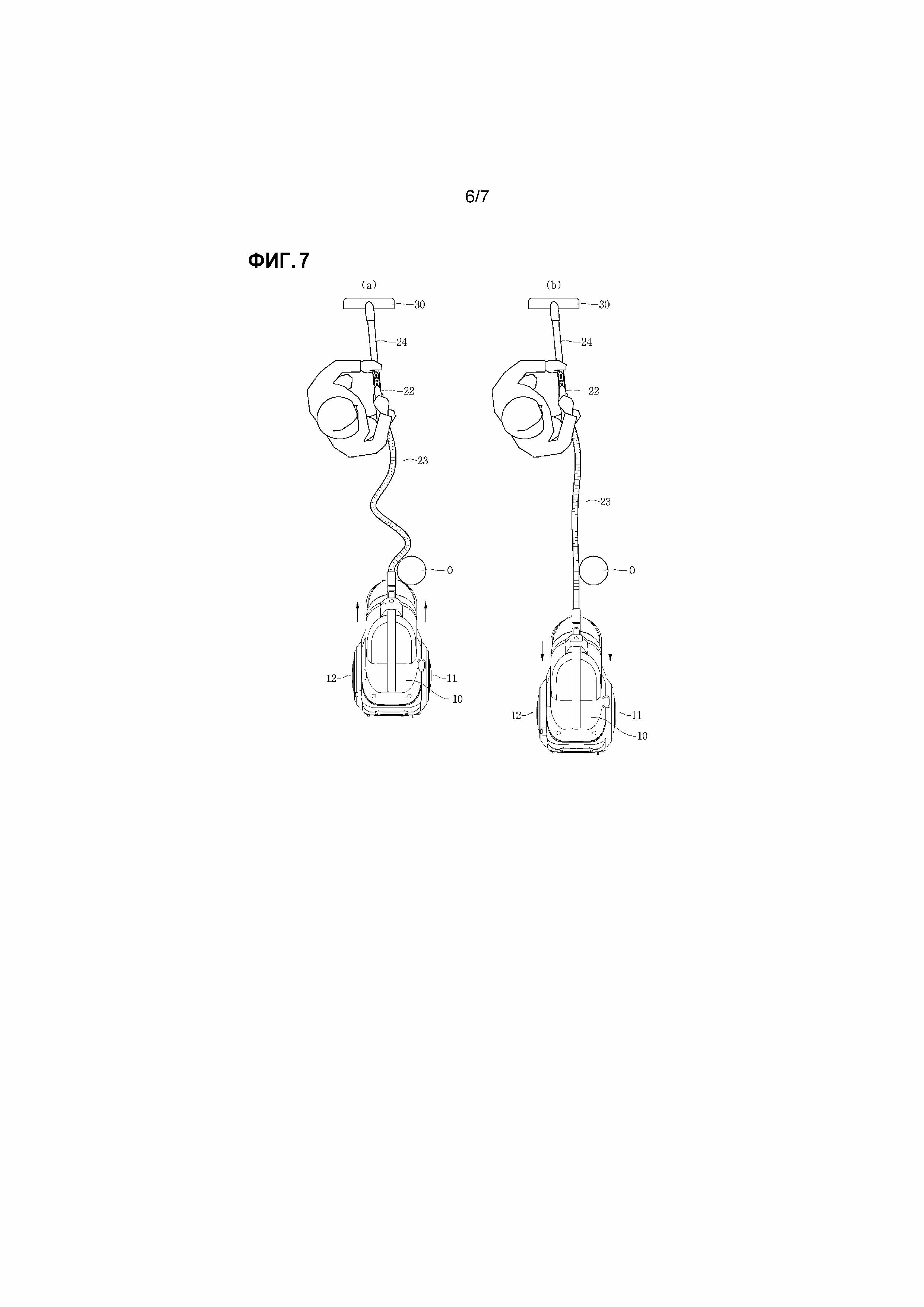
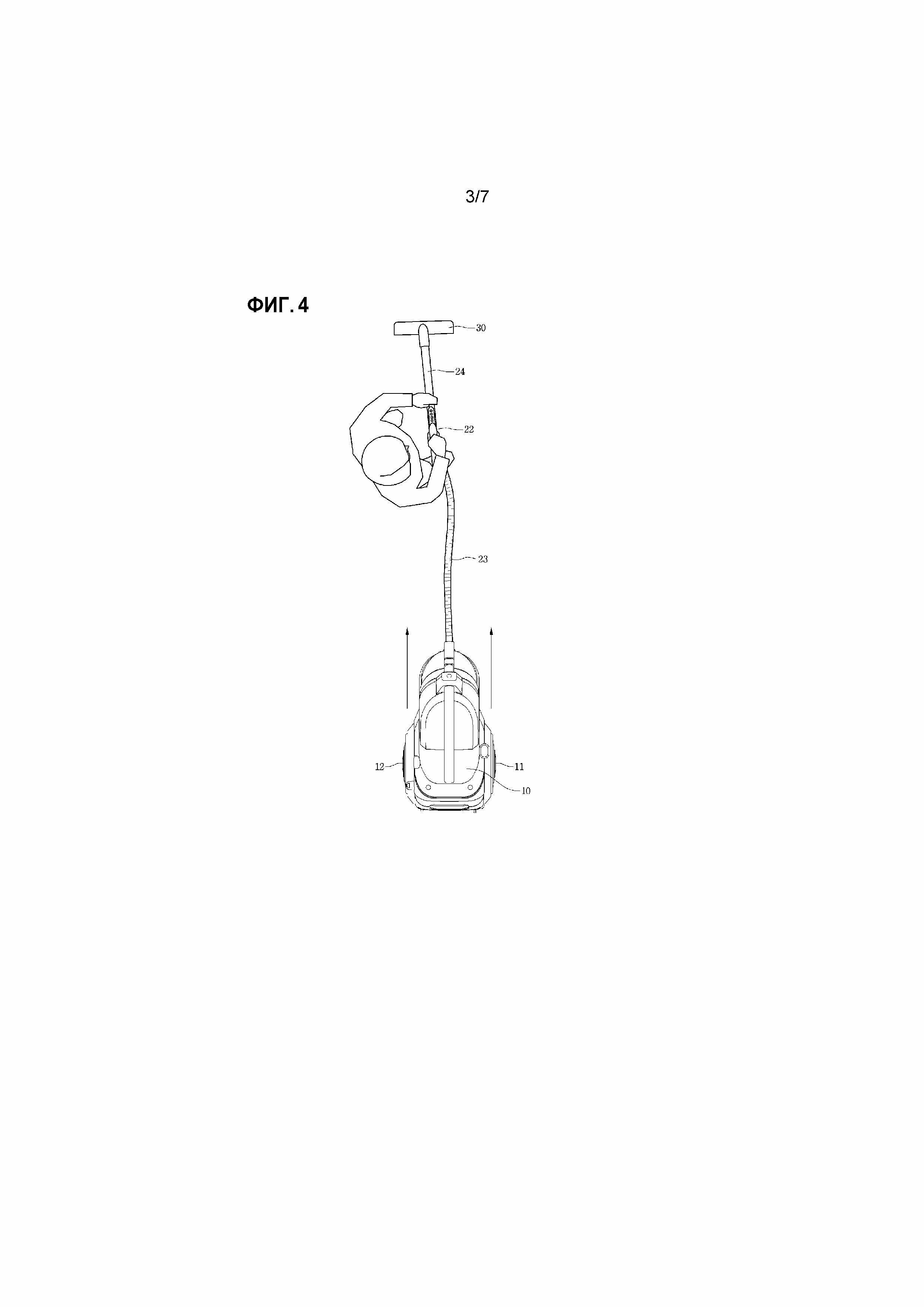
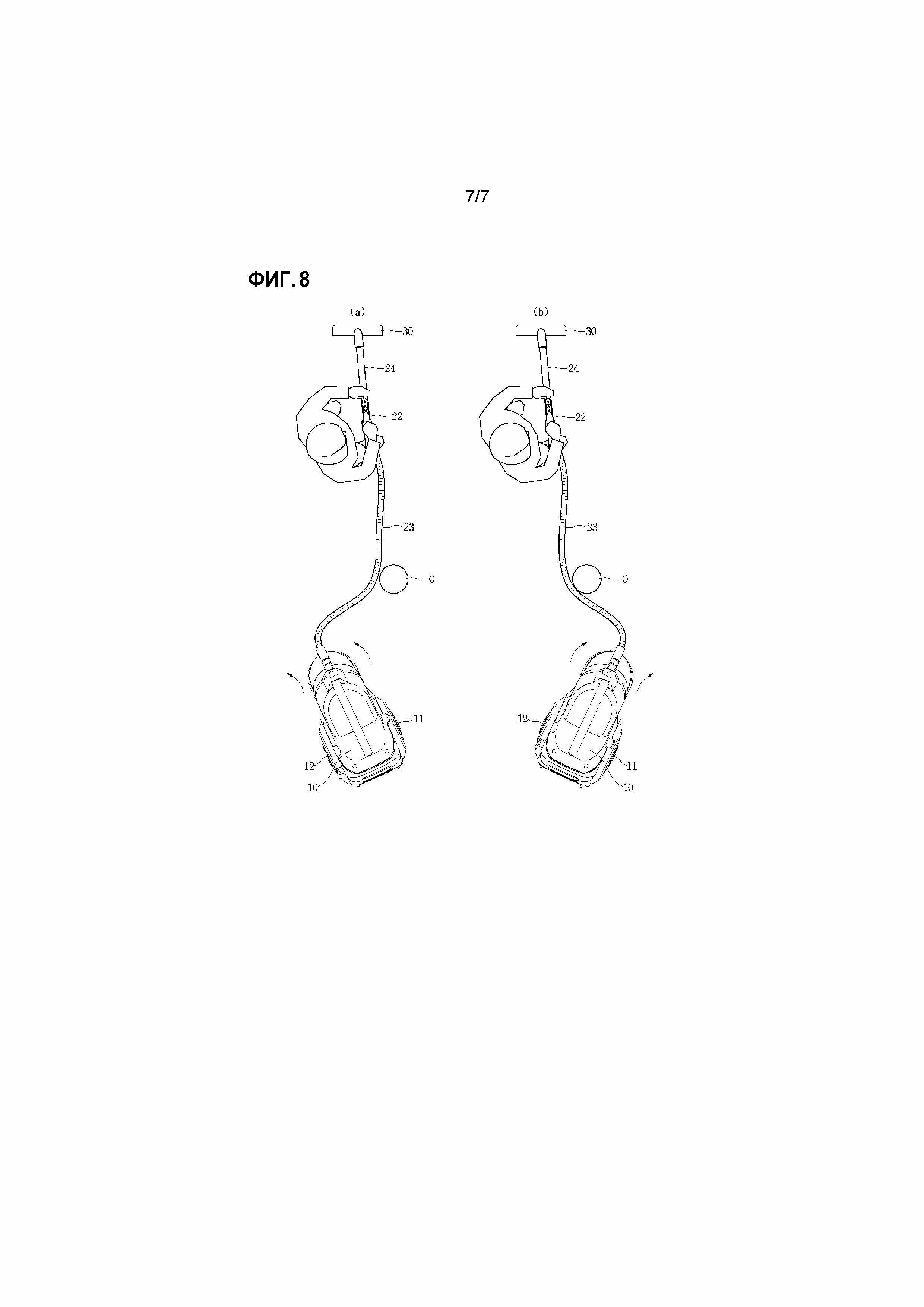
[33] Фиг.7 и 8 представляют собой виды, показывающие положения, в которых корпус пылесоса обходит препятствие.
Вариант осуществления изобретения
[34] Примерные варианты осуществления настоящего изобретения будут более подробно описаны ниже со ссылкой на прилагаемые чертежи. Отмечается, что в чертежах одинаковые или аналогичные элементы обозначены одинаковыми ссылочными позициями по возможности, даже если они показаны в разных чертежах. В приведенном ниже описании настоящего изобретения, подробное описание известных функций и конфигураций, включенных в данное изобретение, не приводятся, чтобы облегчить понимание предмета настоящего изобретения.
[35] В описании элементов настоящего изобретения, могут использоваться термины «первый», «второй», «А», «В», «(а)» и «(b)». Однако поскольку данные термины используются только для того чтобы отличать один элемент от другого, сущность, последовательность и порядок элементов не ограничены данными терминами. Если описано, что элемент «связан с», «находится в контакте с» или «соединен с» другим элементом, то необходимо понимать, что данный элемент может быть непосредственно связан или соединен с другим элементом, а еще другой элемент может быть «связан с», «находиться в контакте с» или «соединен с» другим элементом между ними.
[36] Фиг.1 представляет собой перспективный вид пылесоса в соответствии с вариантом осуществления, а фиг.2 представляет собой блок-схему пылесоса в соответствии с вариантом осуществления.
[37] На фиг.1-2 пылесос 1 соответствии с вариантом осуществления изобретения может содержать корпус 10 пылесоса, содержащий двигатель 14 пылесоса для генерирования силы всасывания и всасывающее устройство 20, соединенное с корпусом 10 пылесоса, для всасывания воздуха и мусора с нижней поверхности.
[38] Корпус 10 пылесоса может содержать перемещающее устройство для перемещения корпуса 10 пылесоса.
[39] Упомянутое перемещающее устройство может содержать по меньшей мере одно колесо. Например, фиг.1 показывает конструкцию, в которой перемещающее устройство содержит множество колес 11 и 12. Упомянутое множество колес 11 и 12 может быть расположено на обеих сторонах корпуса 10 пылесоса. Упомянутое множество колес 11 и 12 может включать первое колесо 11, расположенное на правой стороне корпуса 10 пылесоса, и второе колесо 12, расположенное на левой стороне корпуса 10 пылесоса.
[40] С корпусом 10 пылесоса может быть соединен с возможностью отсоединения пылесборник 40, в котором хранится пыль, отделенная от воздуха.
[41] Всасывающее устройство 20 может содержать всасывающее сопло 30, которое выполнено с возможностью перемещения вдоль упомянутой нижней поверхности, и соединительный механизм для соединения всасывающего сопла 30 с корпусом 10 пылесоса.
[42] Упомянутый соединительный механизм может содержать удлинительную трубу 24, соединенную с всасывающим соплом 30, ручку 22, соединенную с удлинительной трубой 24, и соединительный шланг 23, соединяющий ручку 22 с корпусом 10 пылесоса.
[43] Упомянутое перемещающее устройство может содержать двигатель для вращения упомянутого по меньшей мере одного колеса. Если перемещающее устройство содержит множество колес 11 и 12, то оно также может содержать множество двигателей 15 и 16 соответственно для вращения упомянутого множества колес 11 и 12. Упомянутое множество двигателей 15 и 16 может включать первый двигатель 15 и второй двигатель 16.
[44] Первый двигатель 15 может вращать первое колесо 11, а второй двигатель 16 может вращать второе колесо 12.
[45] Двигатели 15 и 16 выполнены с возможностью независимого приведения в действие. Когда каждый из двигателей 15 и 16 приводят в действие, корпус 10 пылесоса может быть автоматически перемещен вперед и назад, а также повернут налево и направо.
[46] Пылесос 1 может дополнительно содержать ультразвуковой передающий узел 50 для передачи ультразвуковых волн и ультразвуковой приемный узел 60 для приема ультразвуковых волн, передаваемых из ультразвукового передающего узла 50.
[47] Ультразвуковой передающий узел 50 может быть расположен на всасывающем устройстве 20. Хотя это не показано, ультразвуковой узел 50 может быть расположен на ручке 22 или всасывающем сопле 30.
[48] Ультразвуковой приемный узел 60 может быть расположен на корпусе 10 пылесоса. Ультразвуковой приемный узел 60 может содержать множество приемных элементов 61, 62 и 63. Упомянутое множество приемных элементов 61, 62 и 63 могут принимать ультразвуковые волны, передаваемые из ультразвукового передающего узла 50.
[49] Если упомянутое множество приемных элементов 61, 62 и 63 выполнены выступающими горизонтально или вертикально, то линии, соединяющие упомянутое множество приемных элементов 61, 62 и 63 друг с другом, могут иметь треугольную форму. Например, виртуальные линии, соединяющие множество первых выступов 62-63 друг с другом, могут иметь треугольную форму.
[50] Например, упомянутое множество приемных элементов 61, 62 и 63 может включать первый приемный элемент 61, второй приемный элемент и третий приемный элемент 63.
[51] Если упомянутые три приемных элемента 61, 62 и 63 выполнены выступающими горизонтально или вертикально, то линии, соединяющие упомянутые три приемных элемента 61, 62 и 63 друг с другом, могут иметь треугольную форму.
[52] Один участок упомянутых первого-третьего приемных элементов 61, 62 и 63 может быть расположен на высоте, отличающейся от другого участка упомянутых первого-третьего приемных элементов 61, 62 и 63. Кроме того, два приемных элемента из упомянутых трех приемных элементов 61, 62 и 63 могут быть расположены так, что горизонтально разнесены друг от друга.
[53] Пылесос 1 может дополнительно содержать контроллер 70 для управления первым двигателем 15 и вторым двигателем 16.
[54] Контроллер 70 способен определять положение ультразвукового передающего узла 50 на основе ультразвуковых волн, принимаемых ультразвуковым приемным узлом 60. Контроллер 70 способен приводить в действие по меньшей мере один двигатель из первого двигателя 15 и второго двигателя 16, когда необходимо перемещение корпуса 10 пылесоса к ультразвуковому передающему узлу 50, который определен по положению.
[55] Когда ультразвуковой передающий узел 50 размещен на ручке 22, если уборка осуществляется перемещая ручку 22, ультразвуковой передающий узел 50 может быть перемещен вместе с ручкой 22. В этом случае расстояние между ультразвуковым передающим узлом 50 и корпусом 10 пылесоса (или ультразвуковым приемным узлом 60) может изменяться.
[56] Ручка 22 выполнена с возможностью перемещения посредством длины соединительного штанга 23. Когда ручка 22 расположена на заданном расстоянии от корпуса 10 пылесоса, усилие для перемещения ручки 22 может быть приложено к корпусу 10 пылесоса для перемещения корпуса 10 пылесоса вперед.
[57] При этом, когда каждый из двигателей 15 и 16 не приведен в действие, усилие для перемещения корпуса 10 пылесоса может быть приложено пользователем. В данном случае пользователь может оказывать действие для перемещения корпуса 10 пылесоса. Таким образом, в соответствии с данным вариантом осуществления, когда расстояние между ультразвуковым передающим узлом 50 и корпусом 10 пылесоса увеличивается, контроллер 70 способен управлять первым двигателем 15 и вторым двигателем 16 для перемещения корпуса 10 пылесоса к ручке 22.
[58] Пылесос 1 может дополнительно содержат первый датчик 17 тока для регистрации тока, приложенного к первому двигателю 15, и второй датчик 18 тока для регистрации тока, приложенного к второму двигателю 15.
[59] Контроллер 70 способен определять, существует ли препятствие вокруг корпуса 10 пылесоса, на основе тока, регистрируемого каждым из датчиков 17 и 18 тока. Если определяют, что препятствие существует, то контроллер 70 может управлять по меньшей мере одним двигателем из первого двигателя 15 и второго двигателя 16, чтобы позволять корпусу 10 пылесоса обходить препятствие.
[60] Ниже будет подробно описан способ управления пылесосом.
[61] Фиг.3 представляет собой блок-схему последовательности операций для объяснения способа управления пылесосом в соответствии с вариантом осуществления, а фиг.4-6 представляют собой виды, показывающие положения, в которых корпус пылесоса перемещают так, чтобы отслеживать перемещение пользователя. Фиг.7 и 8 представляют собой виды, показывающие положения, в которых корпус пылесоса обходит препятствие.
[62] Фиг.4 представляет собой вид, показывающий положение, в котором корпус пылесоса перемещают вперед, фиг.5 представляет собой вид, показывающий положение, в котором корпус пылесоса поворачивают налево, и фиг.6 представляет собой вид, показывающий положение, в котором корпус пылесоса поворачивают направо.
[63] Ссылаясь на фиг.2-8, когда уборка осуществляется посредством использования пылесоса 1, ультразвуковые волны передаются из ультразвукового передающего узла 50.
[64] При этом ультразвуковой приемный узел 60 может принимать ультразвуковые волны, передаваемые из ультразвукового передающего узла 50 (S1).
[65] Контроллер 70 определяет величину расстояния между ультразвуковым передающим узлом 50 и каждым из приемных элементов 61, 62 и 63 на основе ультразвуковых волн, принимаемых каждым из приемных элементов 61, 62 и 63 (S2).
[66] Контроллер 70 определяет положение ультразвукового передающего узла 50 посредством использования определяемых трех величин расстояния (S3).
[67] Кроме того, контроллер 70 определяет, необходимо ли перемещение корпуса 10 пылесоса, на основе определяемого положения ультразвукового передающего узла 50 (S4).
[68] В данном варианте осуществления, например, когда необходимо перемещение корпуса 10 пылесоса, расстояние между ультразвуковым передающим узлом 50 и корпусом 10 пылесоса может быть больше чем первое контрольное расстояние. При этом упомянутое контрольное расстояние может варьироваться в соответствии с длиной соединительного шланга.
[69] То есть когда первый двигатель 15 и второй двигатель 16 не приведены в действие, корпус 10 пылесоса может удерживаться в остановленном положении. В данном положении, поскольку ручку 22 перемещают при осуществлении уборки посредством использования всасывающего устройства 20, ультразвуковой передающий узел 50 может непрерывно изменять свое положение. Например, когда ручку 22 перемещают вперед и назад, положение ультразвукового передающего узла 50 может также изменяться вперед и назад.
[70] Кроме того, когда расстояние между ультразвуковым передающим узлом 50 и корпусом 10 пылесоса становится больше первого контрольного расстояния, перемещение корпуса 10 пылесоса является необходимым.
[71] В результате, определенном в операции S4, когда перемещение корпуса 10 пылесоса является необходимым, контроллер 70 может приводить в действие по меньшей мере один двигатель из первого двигателя 15 и второго двигателя (S5).
[72] Как показано на фиг.4, для уменьшения расстояния между ультразвуковым передающим узлом 50 и корпусом 10 пылесоса, контроллер 70 может приводить в действие первый и второй двигатели 15 и 16 в одинаковой скоростью вращения. В этом случае корпус 10 пылесоса может быть перемещен вперед к ультразвуковому передающему узлу 50.
[73] Как показано на фиг.5, когда пользователь перемещается влево, одновременно перемещаясь вперед, контроллер 70 может приводить в действие первый и второй двигатели 15 и 16. При этом контроллер 70 может управлять первым и вторым двигателями 15 и 16 так, что первый двигатель 15 вращается с более высокой скоростью, чем второй двигатель 16.
[74] Таким образом, поскольку первое колесо 11 вращается с большей скоростью, чем второе колесо 12, корпус 10 пылесоса может быть повернут налево, одновременно перемещаемый вперед к ультразвуковому передающему узлу 50.
[75] Как показано на фиг.6, когда пользователь перемещается вправо, одновременно перемещаясь вперед, контроллер 70 может приводить в действие первый и второй двигатели 15 и 16. При этом контроллер 70 может управлять первым и вторым двигателями 15 и 16 так, что второй двигатель 16 вращается с большей скоростью чем первый двигатель 15.
[76] Таким образом, поскольку второе колесо 12 вращается с большей скоростью чем первое колесо 11, корпус 10 пылесоса может быть повернут направо, одновременно перемещаемый вперед к ультразвуковому передающему узлу 50.
[77] Фиг.4 и 5 показывают случаи, в которых отсутствует препятствие на пути корпуса 10 пылесоса, когда первый и второй двигатели 15 и 16 приведены в действие.
[78] Однако, как показано на фиг.7А, когда существует препятствие О на пути перемещения корпуса 10 пылесоса, перемещение корпуса 10 пылесоса может быть нарушено препятствием О. В результате, корпус 10 пылесоса может удерживаться в остановленном положении или перемещаться со скоростью поворота меньше чем его первоначальная скорость поворота.
[79] Таким образом, для перемещения корпуса 10 пылесоса к ручке 22 необходимо обойти препятствие О.
[80] Контроллер 70 способен обнаруживать препятствие, в то время как по меньшей мере один двигатель из первого и второго двигателей 15 и 16 приведен в действие, чтобы определять, необходима ли операция для обхода препятствия (S4).
[81] В частности, контроллер 70 способен определять, необходима ли операция для обхода препятствия, на основе тока, регистрируемого по меньшей мере одним датчиком тока из датчиков 17 и 18 тока.
[82] Например, когда ток, регистрируемый упомянутым по меньшей мере одним датчиком тока из датчиков 17 и 18 тока, больше предельного тока, контроллер 70 может определять, что операция для обхода препятствия является необходимой.
[83] Контроллер 70 способен определять целевую скорость вращения каждого из двигателей 15 и 16 и целевой входной ток, так что каждый из двигателей 15 и 16 приводят в действие с заданной целевой скоростью вращения, прикладывая заданный целевой входной ток к каждому из двигателей 15 и 16.
[84] При этом контроллер 70 способен обнаруживать действительную скорость вращения двигателей 15 и 16 (или колес) посредством кодирующего устройства. Кроме того, когда действительная скорость вращения меньше, чем целевая скорость вращения, целевой входной ток может быть увеличен для увеличения действительной скорости вращения.
[85] Кроме того, когда скорость вращения доведена до максимума, целевой входной ток может быть установлен так, чтобы его величина была меньше предельного тока.
[86] Если препятствие О на пути перемещения корпуса 10 пылесоса отсутствует, то целевой входной ток может поддерживаться постоянным и немного изменяемым. Поскольку обычно коэффициент трения между нижней поверхностью, по которой перемещается корпус пылесоса и колеса 11 и 12, контактирующие с нижней поверхностью, больше нуля, целевой входной ток может варьироваться в соответствии с состоянием нижней поверхности или колес 11 и 12. Однако в данном случае изменение целевого входного тока является незначительным.
[87] Таким образом, в данном случае, поскольку целевой входной ток меньше чем предельный ток, контроллер 70 может определять, что препятствие О отсутствует.
[88] С другой стороны, если существует препятствие О на пути перемещения корпуса 10 пылесоса, даже если ток приложен к упомянутому по меньшей мере одному двигателю из двигателей 15 и 16, поскольку упомянутый по меньшей мере один двигатель из двигателей 15 и 16 вращается ненормально, скорость вращения каждого из двигателей 15 и 16 (или колес) может быть меньше чем целевая скорость вращения. В таком случае контроллер 70 может увеличить целевой входной ток, чтобы увеличить скорость вращения каждого из двигателей 15 и 16.
[89] Поскольку корпус 10 пылесоса обычно не перемещается рядом с препятствием О, даже если контроллер 70 увеличивает целевой входной ток, контроллер 70 может увеличивать целевой входной ток постепенно. Таким образом, в то время как целевой входной ток увеличен, ток, регистрируемый упомянутым по меньшей мере одним датчиком тока из датчиков 17 и 18 тока, может быть больше чем предельный ток.
[90] Таким образом, контроллер 70 может определять, что необходима операция для преодоления препятствия, когда ток, регистрируемый упомянутым по меньшей мере одним датчиком тока из датчиков 17 и 18 тока, больше чем предельный ток.
[91] Кроме того, когда время, отпущенное на то, чтобы ток, регистрируемый упомянутым по меньшей мере одним датчиком тока из датчиков 17 и 18 тока, был больше чем предельный ток, достигает заданного времени, контроллер 70 может определять, что необходима операция для преодоления препятствия.
[92] Для другого примера, контроллер 70 может определять, необходима ли операция для обхода препятствия, на основе тока, регистрируемого упомянутым по меньшей мере одним датчиком тока из датчиков 17 и 18 тока, и интенсивности f ультразвуковых волн, принимаемых ультразвуковым приемным блоком 60.
[93] В данном варианте осуществления, интенсивность ультразвуковых волн может представлять собой выходную величину ультразвуковых волн, полученную из одного из упомянутого множества приемных элементов 61, 62 и 63, или суммарную или среднюю величину выходных величин, полученных из упомянутого множества приемных элементов 61, 62 и 63.
[94] В частности, когда по меньшей мере один двигатель из первого и второго двигателей 15 и 16 приводят в действие для нормального перемещения корпуса 10 пылесоса, ток, регистрируемый упомянутым по меньшей мере одним датчиком тока из датчиков 17 и 18 тока может быть по существу неизменным.
[95] Кроме того, поскольку расстояние между корпусом 10 пылесоса и ультразвуковым передающим узлом 50 уменьшается, интенсивность ультразвуковых волн, принимаемых ультразвуковым приемным узлом 60, может быть увеличенной.
[96] Таким образом, отношение тока, регистрируемого по меньшей мере одним датчиком тока из датчиков 17 и 18 тока, к интенсивность ультразвуковых волн может быть увеличенной. То есть отношение тока к интенсивности ультразвуковых волн может быть больше контрольного отношения.
[97] С другой стороны, хотя приведен в действие по меньшей мере один двигатель из первого и второго двигателей 15 и 16, если корпус 10 пылесоса ненормально перемещается рядом с препятствием О, ток, регистрируемый упомянутым по меньшей мере одним датчиком тока из датчиков 17 и 18 тока может быть увеличенным.
[98] Кроме того, поскольку расстояние между корпусом 10 пылесоса и ультразвуковым передающим узлом 50 является неизменным или равномерно увеличиваемым, интенсивность ультразвуковых волн, принимаемых ультразвуковым приемным узлом 60, может быть неизменной или равномерно уменьшаемой. Таким образом, отношение тока, регистрируемого упомянутым по меньшей мере одним датчиком тока из первого и второго датчиков 17 и 18 тока, к интенсивности ультразвуковых волн, может быть уменьшенной. То есть отношение тока к интенсивность ультразвуковых волн может быть меньше чем контрольное отношение.
[99] Таким образом, контроллер 70 может определять, что необходима операция для обхода препятствия О, когда отношение тока к интенсивности ультразвуковых волн меньше чем контрольное отношение.
[100] В результате, определенном в операции S6, если определено, что операция для обхода препятствия О не является необходимой, то контроллер 70 может определять, необходима ли остановка корпуса 10 пылесоса (S7).
[101] То есть контроллер 70 может определять момент времени, в который корпус 10 пылесоса останавливается, в то время как корпус 10 пылесоса перемещают посредством приведения в действие упомянутого по меньшей мере одного двигателя из двигателей 15 и 16.
[102] Когда необходима остановка корпуса 10 пылесоса, расстояние между ультразвуковым передающим узлом 50 и корпусом 10 пылесоса может быть меньше, чем второе контрольное расстояние, которое меньше, чем первое контрольное расстояние.
[103] В результате, определенном в операции S7, когда необходима остановка корпуса 10 пылесоса, контроллер 70 может останавливать работающие двигатели 15 и 16. В результате, перемещение корпуса 10 пылесоса может прекратиться в остановленном положении.
[104] Как было описано выше, причиной остановки корпуса 10 пылесоса при перемещении является предотвращение столкновения корпуса 10 пылесоса с пользователем.
[105] В результате, определенном в операции S6, если определено, что необходима операция для обхода препятствия О, то контроллер 70 может управлять каждым из двигателей 15 и 16 так, что корпус 10 пылесоса осуществляет операцию для обхода препятствия О (S9).
[106] Например, для обхода препятствия О, как показано на фиг.7В, корпус 10 пылесоса может быть перемещен назад на заданное расстояние от положения в данный момент (то есть положения, в котором обнаружено препятствие О). То есть контроллер 70 может управлять каждым из двигателей 15 и 16 так, что двигатели 15 и 16, которые вращаются в первом направлении, вращаются во втором направлении, противоположном упомянутому первому направлению. Таким образом, корпус 10 пылесоса может быть расположен на заданном расстоянии от препятствия О.
[107] Затем, как показано на фиг.8А, в положении, в котором корпус 10 пылесоса расположен на заданном расстоянии от препятствия О, контроллер 70 может управлять корпусом 10 пылесоса так, что корпус 10 пылесоса поворачивают налево, или, как показано на фиг.8В, корпус 10 пылесоса поворачивают направо.
[108] Для того чтобы повернуть корпус 10 пылесоса налево, контроллер 70 может приводить в действие каждый из первого и второго двигателей 15 и 16. При этом контроллер 70 может управлять каждым из первого и второго двигателей 15 и 16 так, что первый двигатель 15 вращается с большей скоростью, чем второй двигатель 16.
[109] С другой стороны, для того чтобы повернуть корпус 10 пылесоса направо, контроллер 70 может приводить в действие каждый из первого и второго двигателей 15 и 16. При этом контроллер 70 может управлять каждым из первого и второго двигателей 15 и 16 так, что второй двигатель 16 вращается с большей скоростью, чем первый двигатель 15.
[110] Контроллер 70 может управлять каждым из двигателей 15 и 16 так, что корпус 10 пылесоса останавливается после поворота налево или направо. Кроме того, контроллер 70 вращает каждый из двигатель 15 и 16 с одинаковой скоростью вращения, так что корпус 10 пылесоса перемещается вперед на заданное расстояние после поворота налево и направо.
[111] Для другого примера, в положении, показанном на фиг.7А, корпус 10 пылесоса может быть повернут налево или направо, одновременно перемещаемый назад, так чтобы быть расположенным на расстоянии от препятствия. То есть каждый из первого и второго двигателей 15 и 16 может вращаться во втором направлении. При этом скорости вращения первого и второго двигателей 15 и 16 могут отличаться друг от друга.
[112] Контроллер 70 может снова определять положение ультразвукового передающего узла после выполнения операции для обхода препятствия О и затем снова определять, необходимо ли перемещение корпуса 10 пылесоса.
[113] В соответствии с предлагаемым вариантом осуществления, поскольку корпус пылесоса перемещают при отслеживании перемещения пользователя, пользователь может непосредственно не перемещать корпус пылесоса, что повышает удобство пользователя.
[114] Кроме того, поскольку определяют, существует ли препятствие на пути перемещения корпуса пылесоса, корпус пылесоса может быть надлежащим образом перемещен в направлении перемещения пользователя.
[115] В данном описании ультразвуковой передающий узел и ультразвуковой приемный узел могут представлять собой элементы для обнаружения перемещения всасывающего устройства и соответственно называться устройством обнаружения.
[116] В вышеописанном варианте осуществления, хотя упомянутый датчик тока и упомянутое устройство обнаружения используются в качестве узла для определения, обойдено ли препятствие, на корпусе пылесоса может быть предусмотрен датчик препятствия.
[117] Например, датчик препятствия может содержать выключатель, расположенный на передней части корпуса пылесоса. Когда корпус пылесоса сталкивается с препятствием, упомянутый выключатель может быть выключен.
[118] Для другого примера, датчик препятствия может содержать по меньшей мере один оптический датчик, такой как инфракрасный датчик или ультразвуковой датчик.
[119] Все элементы могут быть связаны друг с другом для образования единого корпуса или работать как один корпус, однако настоящее изобретение этим не ограничено. То есть один или более элементов селективно связаны и приводятся в действие в пределах объема настоящего изобретения. Термины «содержащий», «включающий» и «имеющий», используемые в формуле и описании изобретения, должны рассматриваться как указывающие открытую группу, которая может включать другие элементы, не указанные конкретно. Если только термины, используемые в данном описании, не определены по-другому, то данные термины могут быть истолкованы в значении, известном для специалистов в данной области техники. Термины, которые широко используются и находятся в словарях, следует толковать как имеющие значения, соответствующие контекстуальным значениям в данной области техники. В данном описании, если не указано прямо, термины не идеально, широко толкуются как формальные значения.
[120] Вышеописанный объект изобретения следует рассматривать как пояснительный, а не ограничивающий, и прилагаемая формула изобретения включает в себя все такие модификации, усовершенствования и другие варианты осуществления, которые находятся в пределах сущности и объема настоящего изобретения. Таким образом, упомянутый вариант осуществления настоящего изобретения следует рассматривать как пояснительный, а не ограничивающий, и техническая сущность настоящего изобретения не ограничена вышеописанным вариантом осуществления. Таким образом, объем изобретения определяется не подробным описанием изобретения, а прилагаемой формулой, и все расхождения в пределах объема должны рассматриваться как включенные в настоящее изобретения.
Холодильник, содержащий вакуумное пространство
Холодильник, имеющий устройство для приготовления льда (варианты)
Холодильник (варианты)
Способ выделения радиоресурса
Холодильник
Холодильник
Формирование таблицы mimo-кодирования
Устройство для передачи и приема сигнала и способ передачи и приема сигнала
Способ и устройство для передачи сигнала harq aсk/nack в системе с множеством антенн
Способ управления машиной для обработки белья
Пылесос

