Результат интеллектуальной деятельности: НОСИТЕЛЬ ЗАПИСИ, НА КОТОРОМ ЗАПИСАНА ПРОГРАММА ОПРЕДЕЛЕНИЯ НАХОЖДЕНИЯ В ПОМЕЩЕНИИ/ВНЕ ПОМЕЩЕНИЯ, СИСТЕМА ОПРЕДЕЛЕНИЯ НАХОЖДЕНИЯ В ПОМЕЩЕНИИ/ВНЕ ПОМЕЩЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ НАХОЖДЕНИЯ В ПОМЕЩЕНИИ/ВНЕ ПОМЕЩЕНИЯ, МОБИЛЬНЫЙ ТЕРМИНАЛ, И СРЕДСТВО ДЛЯ КЛАССИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СРЕДЫ В ПОМЕЩЕНИИ/ВНЕ ПОМЕЩЕНИЯ
Вид РИД
Изобретение
[Область техники, к которой относится изобретение]
[0001] Настоящее изобретение относится к программе определения нахождения в помещении/вне помещения, системе определения нахождения в помещении/вне помещения, способу определения нахождения в помещении/вне помещения, мобильному терминалу, и блоку определения классификации среды в помещении/вне помещения, который определяет находится ли мобильный терминал в помещении/вне помещения.
[Предшествующий уровень техники]
[0002] Некоторые мобильные терминалы, такие как мобильные терминалы с функцией Глобальной Системы Позиционирования (GPS), имеют функцию определения нахождения в помещении/вне помещения в виде определения того, располагается ли локальный терминал в помещении или вне помещения. Функция определения нахождения в помещении/вне помещения делает определение главным образом на основе информации, эквивалентной силе принятого сигнала, такой как отношение принятого сигнала к шуму (SNR), форме волны сигнала от каждого спутника, информации относящейся к более раннему процессу в приеме GPS, посредством использования свойства ослабления принятой силы сигнала GPS в среде в помещении, свойства характеризующего форму волны силы сигнала от GPS, и подобного. Технологии, использующие такую функцию определения нахождения в помещении/вне помещения, включают в себя следующее.
[0003] Например, PTL 1 раскрывает технологию выполнения определения нахождения в помещении/вне помещения в зависимости от того, принимается или нет сигнал GPS. Кроме того, PTL 2 раскрывает технологию выполнения определения нахождения в помещении/вне помещения, на основе чувствительности приема сигнала от спутника позиционирования, и числа захваченных спутников и состояния его изменения. Кроме того, PTL 3 раскрывает технологию выполнения определения нахождения в помещении/вне помещения в зависимости от того, находится или нет средняя сила у сил сигнала у сигналов спутника от множества спутников позиционирования в рамках диапазона силы сигнала, соответствующего в помещении и/или в рамках диапазона силы сигнала, соответствующего вне помещения. PTL 3 также раскрывает технологию выполнения определения нахождения в помещении/вне помещения в зависимости от того, находится или нет сила сигнала у сигнала спутника от спутника позиционирования в рамках диапазона высокого угла места в предсказанном диапазоне силы. Кроме того, PTL 4 раскрывает технологию выполнения определения нахождения в помещении/вне помещения посредством использования характерного значения и значения дисперсии у сигналов от множества спутников позиционирования. Кроме того, PTL 5 описывает технологию выполнения определения нахождения в помещении/вне помещения посредством использования времени, требуемого для получения качества приема радиоволны GPS или позиционной информации GPS. Дополнительно, PTL 6 раскрывает технологию выполнения определения нахождения в помещении/вне помещения посредством использования данных среды (по меньшей мере, одного из отношения сигнала к шуму, отношения сигнала к волне помех, входной силы сигнала, затухания сигнала, функции корреляции формы волны, и значения ширины пика), указывающих форму, локально распространяемую в местоположении приемника.
[Список цитирования]
[Патентная литература]
[0004] [PTL 1] Японская Нерассмотренная Публикация Патентной Заявки № 2010-38712
[PTL 2] Японская Нерассмотренная Публикация Патентной Заявки № 2004-245657
[PTL 3] Японская Нерассмотренная Публикация Патентной Заявки № 2006-292532
[PTL 4] Японская Нерассмотренная Публикация Патентной Заявки № 2013-44651
[PTL 5] Японский Патент № 5333228
[PTL 6] Японская Нерассмотренная Публикация Патентной Заявки № 2012-163566
[PTL 7] Японская Нерассмотренная Публикация Патентной Заявки № 2010-038895
[Сущность изобретения]
[Техническая задача]
[0005] Нижеследующий анализ представлен автором настоящего изобретения.
[0006] Тем не менее, когда каждая из функций определения нахождения в помещении/вне помещения, описанные в PTL с 1 по 6, применяется к спутниковой системе позиционирования с очень большим числом спутников, сигналы, принимаемые от спутников, менее вероятно ослабляются в среде в помещении, и, вследствие этого, сложно установить подходящее пороговое значение определения нахождения в помещении/вне помещения. В частности, число спутников в системах позиционирования увеличивается постепенно с выравниванием ежегодных инвестиций в системы позиционирования и потребностью в повышенной точности позиционирования в качестве фона. Соответственно, принятая сила сигнала GPS, принимаемая в среде в помещении, постепенно увеличивается, и требуется постепенно менять пороговое значение определения нахождения в помещении/вне помещения. Другими словами, вывод и установка подходящего порогового значения определения требуется по мере того, как увеличивается число спутников в каждой из функций определения нахождения в помещении/вне помещения, описанных в PTL с 1 по 6, и точность определения может снижаться при условии, что пороговое значение определения не меняется как того требуется.
[0007] Основная цель настоящего изобретения состоит в предоставлении программы определения нахождения в помещении/вне помещения, системы определения нахождения в помещении/вне помещения, способа определения нахождения в помещении/вне помещения, мобильного терминала, и блока определения классификации среды в помещении/вне помещения, которые выполнены с возможностью определения нахождения в помещении/вне помещения с более высокой точностью, чем способ определения, основанный на силе спутникового приема, для которого установка порогового значения является сложной.
[Решение задачи]
[0008] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение операции определения, посредством использования ресурса аппаратного обеспечения, находится ли мобильный терминал в помещении или вне помещения, причем программа, предписывающая исполнение этапа определения, находится ли мобильный терминал в помещении или вне помещения, на основе, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника, непосредственно или опосредованно полученной от спутникового приемника, предусмотренного в мобильном терминале.
[0009] Система определения нахождения в помещении/вне помещения, в соответствии со вторым аспектом, включает в себя: мобильный терминал, включающий спутниковый приемник для приема спутникового сигнала и также вычисления, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника посредством использования информации орбиты спутника, включенной в спутниковый сигнала, и средство определения классификации среды в помещении/вне помещения, которое определяет, находится ли мобильный терминал в помещении или вне помещения, на основе, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника, полученной от спутникового приемника; сервер данных, коммуникативно соединенный с мобильным терминалом через сеть и также накапливающий данные от мобильного терминала; и средство визуализации классификации среды в помещении/вне помещения, которое запрашивает данные, требуемые для генерирования данных классификации среды в помещении/вне помещения, у сервера данных, генерирует данные классификации среды в помещении/вне помещения посредством построения данных, полученных от сервера данных, на карте, и отображает сгенерированные данные классификации среды в помещении/вне помещения в качестве географического размещения.
[0010] Система определения нахождения в помещении/вне помещения, в соответствии с третьим аспектом, включает в себя: мобильный терминал, включающий в себя спутниковый приемник для приема спутникового сигнала и также вычисления, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника посредством использования информации орбиты спутника, включенной в спутниковый сигнал; сервер данных, коммуникативно соединенный с мобильным терминалом через сеть и также накапливающий данные, включающие в себя, по меньшей мере, любое из информации угла места спутника и информации угла азимута спутника, от мобильного терминала; средство определения классификации среды в помещении/вне помещения, которое определяет, находится ли мобильный терминал в помещении или вне помещения, на основе, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника, полученной от сервера данных; и средство визуализации классификации среды в помещении/вне помещения, которое генерирует данные классификации среды в помещении/вне помещения посредством нанесения данных, полученных от сервера данных, на карту, на основе результата определения, полученного от средства определения классификации среды в помещении/вне помещения, и отображает сгенерированные данные классификации среды в помещении/вне помещения в качестве географического размещения.
[0011] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, для определения, находится ли мобильный терминал в помещении или вне помещения, посредством использования ресурса аппаратного обеспечения, включает в себя этапы, на которых: определяют, находится ли мобильный терминал в помещении или вне помещения, на основе, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника непосредственно или опосредованно полученной от спутникового приемника, предусмотренного в мобильном терминале.
[0012] Мобильный терминал, в соответствии с пятым аспектом, включает в себя: спутниковый приемник для приема спутникового сигнала и также вычисления, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника посредством использования информации орбиты спутника, включенной в спутниковый сигнал; и средство определения классификации среды в помещении/вне помещения, которое определяет, находится ли мобильный терминал в помещении или вне помещения, на основе, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника, полученной от спутникового приемника.
[0013] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, определяет, находится ли мобильный терминал в помещении или вне помещения, на основе, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника непосредственно или опосредованно полученной от спутникового приемника, предусмотренного в мобильном терминале.
[Преимущественные результаты изобретения]
[0014] С первого по шестой аспекты обеспечивают определение нахождения в помещении/вне помещения с более высокой точностью, чем способ определения, основанный на силе спутникового приема, для которой установка порогового значения является сложной.
[Краткое описание чертежей]
[0015] Фиг. 1 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления.
Фиг. 2 является блок-схемой, схематично иллюстрирующей первое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления.
Фиг. 3 является блок-схемой, схематично иллюстрирующей второе функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления.
Фиг. 4 является блок-схемой, схематично иллюстрирующей третье функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления.
Фиг. 5 является блок-схемой, схематично иллюстрирующей четвертое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления.
Фиг. 6 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 7 является блок-схемой, схематично иллюстрирующей первое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 8 является блок-схемой, схематично иллюстрирующей второе функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 9 является блок-схемой, схематично иллюстрирующей третье функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 10 является блок-схемой, схематично иллюстрирующей четвертое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 11 является блок-схемой, схематично иллюстрирующей пятое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 12 является планом неба спутников GPS для иллюстрации 3D зоны азимута, вычисляемой в пятом функционировании блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 13 является блок-схемой, схематично иллюстрирующей шестое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 14 является планом неба спутников GPS для иллюстрации степени смещения к малому углу места и особому азимуту, причем степень вычисляется в шестом функционировании блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
Фиг. 15 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с третьим примерным вариантов осуществления.
Фиг. 16 является блок-схемой, схематично иллюстрирующей функционирование мобильного терминала в системе определения нахождения в помещении/вне помещения в соответствии с третьим примерным вариантом осуществления.
Фиг. 17 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с четвертым примерным вариантом осуществления.
Фиг. 18 является блок-схемой, схематично иллюстрирующей функционирование мобильного терминала в системе определения нахождения в помещении/вне помещения в соответствии с четвертым примерным вариантом осуществления.
Фиг. 19 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с пятым примерным вариантом осуществления.
Фиг. 20 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с шестым примерным вариантом осуществления.
Фиг. 21 является блок-схемой, схематично иллюстрирующей функционирование блока определения классификации среды в помещении/вне помещения в системе определения нахождения в помещении/вне помещения в соответствии с шестым примерным вариантом осуществления.
[Примерный вариант осуществления]
[0016] Примерные варианты осуществления будут описаны ниже со ссылкой на чертежи. Отметим, что ссылочные обозначения, приведенные на чертежах в данном документе, являются исключительно для того, чтобы способствовать пониманию, и не предназначены для того, чтобы ограничивать примерные варианты осуществления иллюстрируемыми формами. Примерные варианты осуществления, описываемые ниже, являются лишь примерами и не ограничивают настоящее изобретение.
[0017] [Первый примерный вариант осуществления]
Система определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления будет описана посредством использования чертежей. Фиг. 1 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления.
[0018] Первый примерный вариант осуществления использует то свойство, что среда в помещении часто имеет окно и, следовательно, направление, в котором принимаются радиоволны от спутника GPS, имеет тенденцию склоняться в направлении окна, и осуществляет определение нахождения в помещении/вне помещения (дополнительно может быть осуществлено определение рядом-с-окном/не-рядом-с-окном в случае в помещении), на основе информации, включающей в себя информацию угла места спутника, основанную на направлении, в котором находится спутник GPS, причем направление получается в более позднем процессе при приеме GPS.
[0019] Отметим, что среда в помещении относится к внутренней части здания, выполненного из искусственных объектов. Среда в помещении является местоположением, куда люди входят, и, вследствие этого, редко бывает полностью замкнутым. В частности, в большинстве случаев, среда в помещении имеет окно для освещения и вентиляционное отверстие для вентиляции. В целом, окно выполнено посредством использования стекла и является, наиболее вероятно, пропускающим радиоволны от спутника GPS, в сравнении с поверхностью стены, выполненной из бетона или подобного. Кроме того, вентиляционное отверстие является частью пути, соединяющего внутреннюю часть и внешнюю часть здания, и обладает свойством, наиболее вероятно, пропуска радиоволн в сравнении с поверхностью стены.
[0020] Последние улучшения характеристик чувствительности приема GPS обеспечивают прием радиоволн от спутников GPS при нахождении в помещении через такое окно или вентиляционное отверстие. В этом случае, присутствует естественная, но упущенная характеристика того, что направление, в котором присутствует передаваемая спутником принимаемая радиоволна, имеет тенденцию смещения к окну или вентиляционному отверстию. Первый примерный вариант осуществления использует характеристику для определения нахождения в помещении/вне помещения. В частности, первый примерный вариант осуществления осуществляет определение в отношении среды в помещении или вне помещения с высокой точностью на основе смещения угла места спутника, передающего радиоволну, принимаемую в среде в помещении.
[0021] Система 100 определения нахождения в помещении/вне помещения является системой, определяющей, находится ли мобильный терминал 1 в помещении или вне помещения. Система 100 определения нахождения в помещении/вне помещения включает в себя мобильный терминал 1, сеть 6, сервер 7 данных, и блок 8 визуализации классификации среды в помещении/вне помещения.
[0022] Мобильный терминал 1 является портативным информационным терминалом связи. Мобильный терминал 1 включает в себя антенну 2 GPS, приемник 3 GPS, блок 4 определения классификации среды в помещении/вне помещения, и блок 5 передачи данных.
[0023] Антенна 2 GPS является спутниковой антенной, преобразующей радиоволну от спутника GPS в сигнал GPS. Антенна 2 GPS выводит сигнал GPS на приемник 3 GPS.
[0024] Приемник 3 GPS является оборудованием, принимающим сигнал GPS (спутниковый сигнал) от антенны 2 GPS. Приемник 3 GPS имеет функцию исполнения позиционирования, на основе принятого сигнала GPS, и вычисления позиционной информации, указывающей позицию, в которой находится мобильный терминал 1. Приемник 3 GPS имеет функцию вычисления информации угла места спутника посредством использования информации орбиты спутника GPS (информация орбиты включена в сигнал GPS). Информация угла места спутника включает в себя информацию угла места спутника (большой угол места), указывающую угол места каждого спутника при большом угле места (больше или равном 45° и меньше или равном 90°) и информацию угла места спутника (малый угол места), указывающую угол места каждого спутника при малом угле места (больше или равном 0° и меньше 45°). Приемник 3 GPS выводит вычисленную информацию позиции, информацию угла места спутника (большой угол места), и информацию угла спутника (малый угол места) на каждый из блока 4 определения классификации среды в помещении/вне помещения и блока 5 передачи данных.
[0025] Отметим, что антенна 2 GPS и приемник 3 GPS не ограничиваются теми, что применяются в Глобальной Системе Позиционирования (GPS), которой в настоящее время оперирует США, а применяются к любой спутниковой системе позиционирования, такой как Глобальная Спутниковая Навигационная Система (GLONASS), которой оперирует Российская Федерация. Кроме того, антенна 2 GPS и приемник 3 GPS применимы к системе позиционирования, объединяющей множество разных спутниковых систем позиционирования.
[0026] Блок 4 определения классификации среды в помещении/вне помещения является функциональным блоком, определяющим классификацию среды в помещении/вне помещения, на основе позиционной информации, информации угла места спутника (большой угол места), и информации угла места спутника (малый угол места) от приемника 3 GPS. Блок 4 определения классификации среды в помещении/вне помещения функционирует посредством использования ресурса аппаратного обеспечения, и может быть предоставлен посредством исполнения программного обеспечения на компьютере или посредством интегральной микросхемы. Блок 4 определения классификации среды в помещении/вне помещения выводит информацию определения касательно определенной классификации среды в помещении/вне помещения на блок 5 передачи данных. Подробное функционирование блока 4 определения классификации среды в помещении/вне помещения будет описано позже.
[0027] Блок 5 передачи данных является функциональным блоком, выполненным с возможностью передачи предварительно определенных данных серверу 7 данных через сеть 6. Блок 5 передачи данных выполнен с возможностью передачи данных, включающих в себя позиционную информацию, информацию угла места спутника (большой угол места), и информацию угла места спутника (малый угол места) от приемника 3 GPS, и информации определения от блока 4 определения классификации среды в помещении/вне помещения.
[0028] Сеть 6 является сетью связи, коммуникативно соединяющей мобильный терминал 1 с сервером 7 данных. Поскольку мобильный терминал является подвижным терминалом, сеть 6 может включать в себя сотовую систему, такую как Долгосрочное Развитие (LTE) и широкополосный множественный доступ с кодовым разделением (W-CDMA), и дополнительно открытую беспроводную локальную сеть (LAN), Bluetooth (зарегистрированный товарный знак), и бесконтактную систему связи. Кроме того, сеть 6 не обязательно ограничивается беспроводной сетью и может включать в себя соединение посредством проводной линии.
[0029] Сервер 7 данных является сервером, накапливающим данные от мобильного терминала 1. Сервер 7 данных имеет функцию приема данных, передаваемых от мобильного терминала 1, через сеть 6, и накопления принятых данных. Сервер 7 данных имеет функцию передачи части накопленных данных блоку 8 визуализации классификации среды в помещении/вне помещения в ответ на запрос от блока 8 визуализации классификации среды в помещении/вне помещения.
[0030] Блок 8 визуализации классификации среды в помещении/вне помещения является функциональным блоком, делающим данные классификации среды в помещении/вне помещения видимыми глазу. Блок 8 визуализации классификации среды в помещении/вне помещения имеет функцию запроса данных, требуемых для генерирования данных классификации среды в помещении/вне помещения, у сервера 7 данных, генерирования данных классификации среды в помещении/вне помещения посредством построения данных, полученных от сервера 7 данных, на карте, и отображения сгенерированных данных классификации среды в помещении/вне помещения в качестве географического размещения. Блок 8 визуализации классификации среды в помещении/вне помещения имеет функцию визуального отображения релевантности информации качества сети у сети 6, удерживаемой в мобильном терминале 1 (например, информация физического качества, такая как пропускная способность восходящей линии связи и нисходящей линии связи, и сила сигнала) к данным классификации среды в помещении/вне помещения, посредством представления, в качестве географического размещения, информации качества сети у сети 6 в дополнение к данным классификации среды в помещении/вне помещения.
[0031] Далее, будет описано функционирование мобильного терминала в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления. Дополнительно, см. Фиг. 1 в отношении компонентов мобильного терминала.
[0032] Сначала, в мобильном терминале 1, приемник 3 GPS принимает сигнал GPS, подаваемый от антенны 2 GPS. Далее, приемник 3 GPS исполняет позиционирование, на основе принятого сигнала GPS. При исполнении позиционирования, приемник 3 GPS вычисляет позиционную информацию (широту, долготу, высоту над уровнем моря) мобильного терминала 1, на основе принятого сигнала GPS, и вычисляет информацию угла места спутника (большой угол места) и информацию угла места спутника (малый угол места), на основе информации орбиты спутника, включенной в принятый сигнал GPS. Далее, приемник 3 GPS выводит информацию, включающую в себя вычисленную позиционную информацию (широту, долготу, высоту над уровнем моря), информацию угла места спутника (большой угол места), и информацию угла места спутника (малый угол места) на блок 4 определения классификации среды в помещении/вне помещения и блок 5 передачи данных.
[0033] Далее блок 4 определения классификации среды в помещении/вне помещения определяет классификацию среды в виде, располагается ли мобильный терминал 1 в помещении или вне помещения, в соответствии с предварительно определенным функционированием, на основе информации, включающей в себя позиционную информацию (широту, долготу, высоту над уровнем моря), информацию угла места спутника (большой угол места), и информацию угла места спутника (малый угол места) от приемника 3 GPS, и выводит результирующую информацию определения на блок 5 передачи данных. Предварительно определенное функционирование будет описано позже.
[0034] Далее, блок 5 передачи данных передает, серверу 7 данных через сеть 6, данные, включающие в себя позиционную информацию (широту, долготу, высоту над уровнем моря), информацию угла места спутника (большой угол места), и информацию угла места спутника (малый угол места) от приемника 3 GPS, и информацию определения от блока 4 определения классификации среды в помещении/вне помещения.
[0035] Далее сервер 7 данных принимает данные от блока 5 передачи данных и накапливает принятые данные. Впоследствии, сервер 7 данных входит в состояние, в котором допускается прием запроса данных от блока 8 визуализации классификации среды в помещении/вне помещения.
[0036] Блок 8 визуализации классификации среды в помещении/вне помещения запрашивает часть накопленных данных у сервера 7 данных.
[0037] Далее, в ответ на запрос посредством блока 8 визуализации классификации среды в помещении/вне помещения, сервер 7 данных передает часть накопленных данных блоку 8 визуализации классификации среды в помещении/вне помещения.
[0038] Далее, блок 8 визуализации классификации среды в помещении/вне помещения генерирует данные классификации среды в помещении/вне помещения посредством построения данных с сервера 7 данных на карте и отображает сгенерированные данные классификации среды в помещении/вне помещения в качестве географического размещения. В это время, блок 8 визуализации классификации среды в помещении/вне помещения визуально отображает релевантность информации качества сети у сети 6, удерживаемой в мобильном терминале 1, данным классификации среды в помещении/вне помещения посредством представления, в качестве географического распределения, информации качества сети у сети 6 в дополнение к данным классификации среды в помещении/вне помещения.
[0039] Далее, будут описаны предварительно определенные функционирования.
[0040] [Первое функционирование]
Первое функционирование будет описано посредством использования чертежа. Фиг. 2 является блок-схемой, схематично иллюстрирующей первое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления. Первое функционирование осуществляет определение нахождения в помещении/вне помещения, на основе соотношения количества спутников между спутниками большого-угла-места и малого-угла-места. Дополнительно, см. Фиг. 1 в отношении компонентов мобильного терминала.
[0041] Сначала, блок 4 определения классификации среды в помещении/вне помещения принимает, от приемника 3 GPS, информацию, включающую в себя позиционную информацию (широту, долготу, высоту над уровнем моря), информацию угла места спутника (большой угол места), и информацию угла места спутника (малый угол места) (Этап A1).
[0042] Далее, блок 4 определения классификации среды в помещении/вне помещения подсчитывает число спутников малого-угла-места, на основе позиционной информации (широты, долготы, высоты над уровнем моря) и информации угла места спутника (малого угла места) (Этап A2).
[0043] Далее, блок 4 определения классификации среды в помещении/вне помещения подсчитывает число спутников большого-угла-места, на основе позиционной информации (широты, долготы, высоты над уровнем моря) и информации угла места спутника (большого угла места) (Этап A3). В дополнение, Этап A3 может быть исполнен до или одновременно с Этапом A2.
[0044] Далее, блок 4 определения классификации среды в помещении/вне помещения вычисляет соотношение количества спутников между спутниками большого-угла-места и малого-угла-места (Этап A4). Соотношение количества спутников между спутниками большого-угла-места и малого-угла-места вычисляется посредством деления числа спутников малого-угла-места на число спутников большого-угла-места. Тем не менее, когда число спутников большого-угла-места равно нулю, значение соотношения количества спутников между спутниками большого-угла-места и малого-угла-места обрабатывается как бесконечность. Значение соотношения количества спутников между спутниками большого-угла-места и малого-угла-места становится больше по мере того, как увеличивается число спутников GPS более-малого-угла-места, передающих принимаемые радиоволны.
[0045] Далее, модуль 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное соотношение числа спутников между спутниками большого-угла-места и малого-угла-места больше или равно предварительно установленному пороговому значению THR (пороговое значение соотношения количества спутников) (Этап A5).
[0046] Когда соотношение количества спутников больше или равно пороговому значению THR (ДА на Этапе A5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (Этап A6) и завершает функционирование.
[0047] Когда соотношение количества спутников не больше или равно пороговому значению THR, (НЕТ на Этапе A5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап A7) и завершает функционирование.
[0048] [Второе функционирование]
Второе функционирование будет описано посредством использования чертежа. Фиг. 3 является блок-схемой, схематично иллюстрирующей второе функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления. Второе функционирование осуществляет не только определение внутри помещения/вне помещения, но также определение рядом-с-окном/не-рядом-с-окном в случае в помещении, на основе соотношения количества спутников между спутниками большого-угла-места и малого-угла-места. Дополнительно, см. Фиг. 1 в отношении компонентов мобильного терминала.
[0049] Сначала, после прохождения через Этапы с B1 по B4, идентичные Этапам с A1 по A4 на Фиг. 2, блок 4 определения классификации среды в помещении/вне помещения оценивает, является или нет вычисленное соотношение количества спутников между спутниками большого-угла-места и малого-угла-места больше или равно предварительно установленному пороговому значению THR_L (первое пороговое значение соотношения количества спутников) (Этап B5).
[0050] Когда соотношение количества спутников больше или равно пороговому значению THR_L (ДА на Этапе B5), блок 4 определения классификации среды в помещении/вне помещения оценивает, является или нет вычисленное соотношение количества спутников между спутниками большого-угла-места и малого-угла-места больше или равно предварительно установленному пороговому значению TH R _H (второе пороговое значение соотношения количества спутников) (Этап B6). Предполагается, что THR_H больше TRR_L. Вышеуказанное основано на свойстве, что соотношение количества спутников между спутниками большого-угла-места и малого-угла-места увеличивается по мере того, как увеличивается число спутников GPS малого-угла-места, передающих принимаемые радиоволны, и не расположенных рядом с окном.
[0051] Когда соотношение количества спутников больше или равно пороговому значению THR_H, (ДА на Этапе B6), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (не около окна) (Этап B7) и завершает функционирование.
[0052] Когда соотношение количества спутников не больше или равно пороговому значению THR_H (НЕТ на Этапе B6), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (рядом с окном) (Этап B8) и завершает функционирование.
[0053] Когда соотношение количества спутников не больше или равно пороговому значению THR_L (НЕТ на Этапе B5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап B9) и завершает функционирование.
[0054] [Третье функционирование]
Третье функционирование будет описано посредством использования чертежа. Фиг. 4 является блок-схемой, схематично иллюстрирующей третье функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления. Третье функционирование осуществляет определение нахождения в помещении/вне помещения, на основе статистики (среднего значения, максимального значения, стандартного отклонения) углов места спутников. Дополнительно, см. Фиг. 1 в отношении компонентов мобильного терминала.
[0055] Сначала, после прохождения через Этап C1 идентичный Этапу A1 на Фиг. 2, блок 4 определения классификации среды в помещении/вне помещения вычисляет статистику (среднее значение, максимальное значение, стандартное отклонение) углов места всех спутников, передающих принимаемые радиоволны, на основе позиционной информации (широты, долготы, высоты над уровнем моря), информации угла места спутника (большого угла места), и информации угла места спутника (малого угла места) (Этап C2).
[0056] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное среднее значение углов места (средний угол места) меньше или равно предварительно установленному пороговому значению THEL_A (пороговое значение среднего угла места) (Этап C3).
[0057] Когда среднее значение углов места меньше или равно пороговому значению THEL_A (ДА на Этапе C3), блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное максимальное значение углов места (максимальный угол места) меньше или равно предварительно установленному пороговому значению THEL_M (пороговое значение максимального угла места) (Этап C4).
[0058] Когда максимальное значение углов места меньше или равно пороговому значению THEL_M (ДА на Этапе C4), блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное стандартное отклонение углов места (стандартное отклонение угла места) меньше или равно предварительно установленному пороговому значению THσEL (пороговое значение стандартного отклонения угла места) (Этап C5). Отметим, что Этапы с C3 по C5 могут быть переупорядочены.
[0059] Когда стандартное отклонение углов места меньше или равно пороговому значению THσEL (ДА на Этапе C5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (Этап C6) и завершает функционирование.
[0060] Когда среднее значение углов места не меньше или равно пороговому значению THEL_A (НЕТ на Этапе C3), максимальное значение углов места не меньше или равно пороговому значению THEL_M (НЕТ на Этапе C4), или стандартное отклонение углов места не меньше или равно пороговому значению THσEL (НЕТ на Этапе C5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап C7) и завершает функционирование.
[0061] [Четвертое функционирование]
Четвертое функционирование будет описано посредством использования чертежа. Фиг. 5 является блок-схемой, схематично иллюстрирующей четвертое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии с первым примерным вариантом осуществления. Четвертое функционирование осуществляет не только определение нахождения в помещении/вне помещения, но также определение рядом-с-окном/не-рядом-с-окном в случае в помещении на основе статистики (среднего значения, максимального значения, стандартного отклонения) углов места спутников. Дополнительно, см. Фиг. 1 в отношении компонентов мобильного терминала.
[0062] Сначала, после прохождения через Этапы с D1 по D4 идентичные Этапам с C1 по C4 на Фиг. 4, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное стандартное отклонение углов места меньше или равно предварительно установленному пороговому значению THσEL_H (первое пороговое значение стандартного отклонения угла места) (Этап D5).
[0063] Когда стандартное отклонение углов места меньше или равно пороговому значению THσEL_H (ДА на Этапе D5), блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное стандартное отклонение углов места меньше или равно предварительно установленному значению THσEL_L (второе пороговое значение стандартного отклонения угла места) (Этап D6). Предполагается, что THσEL_H больше THσEL_L. Вышеприведенное основано на том свойстве, что стандартное отклонение углов места уменьшается по мере увеличения расстояния от окна.
[0064] Когда стандартное отклонение углов места меньше или равно пороговому значению THσEL_L (ДА на Этапе D6), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (не рядом с окном) (Этап D7) и завершает функционирование.
[0065] Когда стандартное отклонение углов места не меньше или равно пороговому значению THσEL_L (НЕТ на Этапе D6), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (рядом с окном) (Этап D8) и завершает функционирование.
[0066] Когда среднее значение углов места не меньше или равно пороговому значению THEL_A (НЕТ на Этапе D3), максимальное значение углов места не меньше или равно пороговому значению THEL_M (НЕТ на Этапе D4), или стандартное отклонение углов места не меньше или равно пороговому значению THσEL_H (НЕТ на Этапе D5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап D9) и завершает функционирование.
[0067] Система определения нахождения в помещении/вне помещения как описано выше может быть использована в области захвата географического размещения беспроводного качества в беспроводной сети. Во-первых, беспроводная сеть, именуемая сотовой системой, главным образом используемая для коммерческого использования, такая как LTE, W-CDMA, глобальная система для связи с подвижными объектами (GSM [зарегистрированный товарный знак]) может быть перечислена в качестве беспроводной сети. Во-вторых, сеть беспроводной LAN, нацеленная на связь малого радиуса действия, включая некоммерческое использование, может быть перечислена в качестве беспроводной сети. В-третьих, беспроводная сеть для общественного использования, такого как полиция или пожарное депо, или частного использования, такого как частное предприятие, система беспроводной связи не ограниченная в сети, может быть перечислена в качестве беспроводной сети.
[0068] Первый примерный вариант осуществления предоставляет следующие результаты.
[0069] Первый примерный вариант осуществления способен обеспечить определение нахождения в помещении/вне помещения с более высокой точностью, чем обычная технология. Причина состоит в том, что обычная технология осуществляет определение нахождения в помещении/вне помещения посредством использования ослабления принятой силы сигнала GPS в среде в помещении и свойства, характеризирующего временную форму волны силы сигнала, и, вследствие этого, подходящая установка порогового значения определения нахождения в помещении/вне помещения является сложной; тогда как первый примерный вариант осуществления использует, в качестве индикатора, физическую статистику, указывающую то свойство, что направление спутника, передающего радиоволну, принимаемую в здании, склоняется к малому углу места, причем индикатор легко выражается посредством физики на основе апертурного угла окна в вертикальной плоскости к горизонту, и, вследствие этого, способен обеспечить высокоточное определение нахождения в помещении/вне помещения, допуская простое определение установки порогового значения.
[0070] Кроме того, при применении в спутниковой системе позиционирования с очень большим числом спутников, первый примерный вариант осуществления позволяет проще устанавливать пороговое значение определения нахождения в помещении/вне помещения, чем обычная технология. Причина состоит в том, что когда обычная технология применяется к спутниковой системе позиционирования с очень большим числом спутников, принятые сигналы от большого числа спутников вряд ли ослабевают в среде в помещении, и, вследствие этого, подходящая установка порогового значения определения нахождения в помещении/вне помещения является сложной; тогда как первый примерный вариант осуществления вводит индикатор, являющийся смещением в направлении спутника, передающего принимаемую радиоволну, причем на индикатор не оказывает влияние большое число спутников.
[0071] Кроме того, в соответствии с первым примерным вариантом осуществления, индикатор будучи смещением в направлении спутника, передающего принимаемую радиоволну, имеет то свойство, что возрастает надежность по мере того, как увеличивается число спутников, и, вследствие этого, когда применяется к спутниковой системе позиционирования с очень большим числом спутников, первый примерный вариант осуществления способен обеспечивать определение нахождения в помещении/вне помещения с более высокой точностью, чем обычная технология.
[0072] Кроме того, при применении к системе позиционирования, в которой спутники увеличиваются постепенно, первый примерный вариант осуществления способен исключить потребность постепенного изменения или установки порогового значения определения, которое требуется обычной технологией. Причина состоит в том, что когда обычная технология применяется к системе позиционирования, в которой спутники увеличиваются постепенно, принятая сила сигнала от спутника, передающего радиоволну, принимаемую в среде в помещении, увеличивается постепенно, и, вследствие этого, требуется постепенно менять и устанавливать подходящее пороговое значение определения нахождения в помещении/вне помещения, тем самым делая вывод и установку подходящего порогового значения определения сложными; тогда как в соответствии с первым примерным вариантом осуществления, даже в системе позиционирования, в которой спутники увеличиваются постепенно, на индикатор не влияет изменение числа спутников, причем индикатор является значением смещения в направлении, в котором присутствует спутник, передающий радиоволну, принимаемую через окно.
[0073] Кроме того, поскольку индикатор, будучи значением смещения в направлении, в котором присутствует спутник, передающий принимаемую радиоволну, имеет то свойство, что надежность увеличивается по мере того, как увеличивается число спутников при применении в системе позиционирования, в которой число спутников увеличивается постепенно, первый примерный вариант осуществления способен обеспечить определение нахождения в помещении/вне помещения с более высокой точностью, чем обычная технология.
[0074] Кроме того, в дополнение к определению в помещении/вне помещения посредством обычной технологии, первый примерный вариант осуществления способен увеличивать типы определения классификации в среде в помещении, которые являются «в помещении не рядом с окном» и «в помещении рядом с окном» исходя из определения для местоположений в помещении. Причина состоит в том, что посредством использования того свойства, что чем ближе позиция в помещении к окну, тем больше смещение в направлении, в котором присутствует спутник, передающий принимаемую радиоволну, первый примерный вариант осуществления обеспечивает дополнительное определение радом-с-окном/не-рядом-с-окном в случае в помещении посредством предоставления порогового значения определения нахождения рядом-с-окном в дополнение к пороговому значению определения нахождения в помещении/вне помещения.
[0075] Кроме того, первый примерный вариант осуществления передает данные после определения, посредством реализации объекта исполнения обработки определения нахождения в помещении/вне помещения в мобильном терминале 1, и, вследствие этого, обладает преимуществом в том, что передаваемые данные уменьшаются, тем самым сокращая нагрузку на сеть.
[0076] Отметим, что в качестве предпосылки первого примерного варианта осуществления, исполнение беспроводной зоны, такое как добавление новых базовых станций и регулировка параметра в существующих базовых станциях, выполняется для того, чтобы улучшить качество зоны в мобильной телефонной сети, будучи сотовой системой. В обычном исполнении беспроводной зоны, выполняется тест производительности посредством транспортного средства, измеряющего радиоволну, обрадованного предназначенным измерительным инструментом, с целью захвата настоящей ситуации и обнаружения проблем, которые относятся к беспроводному качеству. Такой тест производительности требует перемещения наиболее точно по дорогам в зоне и, вследствие этого, является основной причиной увеличения затрат в исполнении беспроводной зоны. Кроме того, местоположение измерения ограниченное дорогами проходимыми для транспортного средства, измеряющего радиоволны, вызывает недостаточный захват качества в местоположении в помещении, где частота телефонных вызовов является высокой.
[0077] В качестве другого подхода для решения проблем, может быть приведен способ использования обыкновенного терминала, такого как мобильный телефон или интеллектуальный телефон, фактически используемого пользователем, в качестве альтернативы теста производительности. В частности, может быть приведен способ, предписывающий обыкновенному терминалу измерять беспроводное качество, такое как отношение силы принятого электрического поля и сигнала к шуму помех (SINR) в соте и представлять отчет о результате измерения системе администрирования сети наряду с позиционной информации. Такая технология измерения качества, использующая обыкновенный терминал, повысила ожидания в отрасли и стандартизована в качестве Минимизации Теста Производительности (MDT) в Проекте Партнерства 3-его Поколения (3GPP).
[0078] Между тем, в целом, беспроводное качество макро базовой станции, инсталлированной вне помещения, более низкое в помещении, чем вне помещения из-за влияния потерь при передаче, вызванных зданием. Присутствует много случаев, в которых сложно решить проблему беспроводного качества в помещении посредством изменения параметра в существующей макро базовой станции, и в таком случае, реализуется индивидуальная мера, такая как инсталляция базовой станции в помещении (фемто-базовой станции или пико-базовой станции). Дополнительно, когда обнаруживается местоположение рядом с окном в помещении, где беспроводное качество низкое, может быть выполнена подходящая оценка касательно увеличения макро базовых станций, инсталлированных вне помещения, вместо базовой станции в помещении, и, вследствие этого, желателен захват позиционной информации, такой как рядом с окном или не рядом с окном, в помещении.
[0079] Таким образом, с точки зрения исполнения беспроводной зоны эффективным является раздельная обработка качества вне помещения и качества в помещении. Соответственно, предполагая использование данных измерения качества посредством обыкновенного терминала для исполнения беспроводной зоны, желательно, чтобы данные измерения вне помещения и данные измерения в помещении обрабатывались раздельно. Первый примерный вариант осуществления был разработан с учетом предпосылки, описанной выше.
[0080] [Второй примерный вариант осуществления]
Система определения нахождения в помещении/вне помещения в соответствии с вторым примерным вариантом осуществления будет описана посредством использования чертежей. Фиг. 6 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления.
[0081] Второй примерный вариант осуществления является модифицированным примером первого примерного варианта осуществления (см. Фиг. 1) и осуществляет определение нахождения в помещении/вне помещения (может быть дополнительно осуществлено определение рядом-с-окном/не-рядом-с-окном в случае в помещении), на основе информации, включающей в себя информацию об угле азимута спутника GPS (информация угла азимута спутника). Приемник 3 GPS имеет функцию вычисления информации угла азимута спутника посредством использования информации орбиты спутника, включенной в сигнал GPS, от антенны 2 GPS. Приемник 3 GPS выводит информацию, включающую в себя вычисленную информацию угла азимута спутника на каждый из блока 4 определения классификации среды в помещении/вне помещения и блока 5 передачи данных. Блок 4 определения классификации среды в помещении/вне помещения имеет функцию определения классификации среды в помещении/вне помещения, на основе информации, включающей в себя информацию угла азимута спутника. Блок 5 передачи данных выполнен с возможностью передачи данных, включающих в себя информацию угла азимута спутника. Оставшаяся конфигурация является сходной с той, что в соответствии с примерным вариантом 1 осуществления.
[0082] Касательно функционирования мобильного терминала 1 в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления, приемник 3 GPS выводит информацию, включающую в себя информацию угла азимута спутника на блок 4 определения классификации среды в помещении/вне помещения и блок 5 передачи данных. Далее, блок 4 определения классификации среды в помещении/вне помещения принимает информацию, включающую в себя информацию угла азимута спутника от приемника 3 GPS, определяет классификацию среды в позиции, где присутствует мобильный терминал 1, в соответствии с предварительно определенным функционированием, на основе принятой информации, и выводит результирующую информацию определения на блок 5 передачи данных. Отметим, что предварительно определенное функционирование будет описано позже. Оставшееся функционирование является сходным с тем, что в соответствии с примерным вариантом 1 осуществления.
[0083] Далее, будут описаны предварительно определенные функционирования.
[0084] [Первое функционирование]
Первое функционирование будет описано посредством использования чертежа. Фиг. 7 является блок-схемой, схематично иллюстрирующей первое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления. Первое функционирование не только осуществляет определения нахождения в помещении/вне помещения и рядом-с-окном/не-рядом-с-окном, на основе статистики (среднего значения, максимального значения, стандартного отклонения) углов места спутников, но также осуществляет определение радом-с-окном/не-рядом-с-окном, на основе ширины азимута у спутников. Дополнительно, см. Фиг. 6 в отношении компонентов мобильного терминала.
[0085] Сначала, после прохождения через Этапы с E1 по E6 идентичные Этапам с D1 по D6 на Фиг. 6, когда стандартное отклонение углов места меньше или равно пороговому значению THσEL_L (ДА на Этапе E6), блок 4 определения классификации среды в помещении/вне помещения вычисляет ширину азимута у спутников, передающих принимаемые радиоволны (Этап E7).
[0086] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленная ширина азимута меньше или равна предварительно установленному пороговому значению THAZ_W (Этап E8).
[0087] Когда ширина азимута меньше или равна пороговому значению THAZ_W (ДА на Этапе E8), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (не рядом с окном) (Этап E9) и завершает функционирование.
[0088] Когда стандартное отклонение углов места не меньше или равно пороговому значению THσEL_L (НЕТ на Этапе E6), или ширина азимута не меньше или равна пороговому значению THAZ_W (НЕТ на Этапе E8, блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (рядом с окном) (Этап E10) и завершает функционирование.
[0089] Когда среднее значение углов места не меньше или равно пороговому значению THEL_A (НЕТ на Этапе E3), максимальное значение углов места не меньше или равно пороговому значению THEL_M (НЕТ на Этапе E4), или стандартное отклонение углов места не меньше или равно пороговому значению THσEL_H (НЕТ на Этапе E5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап E11) и завершает функционирование.
[0090] [Второе функционирование]
Второе функционирование будет описано посредством использования чертежа. Фиг. 8 является блок-схемой, схематично иллюстрирующей второе функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления. Второе функционирование не только осуществляет определения нахождения в помещении/вне помещения и рядом-с-окном/не-рядом-с-окном, на основе статистики (среднего значения, максимального значения, стандартного отклонения) углов места спутников, но также осуществляет определение рядом-с-окном/не рядом-с-окном, на основе стандартного отклонения углов азимута у спутников. Дополнительно, см. Фиг. 6 в отношении компонентов мобильного терминала.
[0091] Сначала, после прохождения через Этапы с F1 по F6 идентичные Этапам с E1 по E6 на Фиг. 7, когда стандартное отклонение углов места меньше или равно пороговому значению THσEL_L (ДА на Этапе F6), блок 4 определения классификации среды в помещении/вне помещения вычисляет стандартное отклонение углов азимута спутников, передающих принимаемые радиоволны (стандартное отклонение угла азимута) (Этап F7).
[0092] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное стандартное отклонение углов азимута меньше или равно предварительно установленному пороговому значению THσAZ (пороговое значение стандартного отклонения угла азимута) (Этап F8).
[0093] Когда стандартное отклонение углов азимута меньше или равно пороговому значению THσAZ (ДА на Этапе F8), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (не рядом с окном) (Этап F9) и завершает функционирование.
[0094] Когда стандартное отклонение углов места не меньше или равно пороговому значению THσEL_L (НЕТ на Этапе F6) или стандартное отклонение углов азимута не меньше или равно пороговому значению THσAZ (НЕТ на Этапе F8), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (рядом с окном) (Этап F10) и завершает функционирование.
[0095] Когда среднее значение углов места не меньше или равно пороговому значению THEL _A (НЕТ на Этапе F3), максимальное значение углов места не меньше или равно пороговому значению THEL_M (НЕТ на Этапе F4), или стандартное отклонение углов места не меньше или равно пороговому значению THσEL_H (НЕТ на Этапе F5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап F11) и завершает функционирование.
[0096] [Третье функционирование]
Третье функционирование будет описано посредством использования чертежа. Фиг. 9 является блок-схемой, схематично иллюстрирующей третье функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления. Третье функционирование осуществляет определение нахождения в помещении/вне помещения, на основе комбинированного стандартного отклонения углов места и углов азимута спутников. Дополнительно, см. Фиг. 6 в отношении компонентов мобильного терминала.
[0097] Сначала, после прохождения через Этап G1 идентичный Этапу E1 на Фиг. 7, блок 4 определения классификации среды в помещении/вне помещения вычисляет комбинированное стандартное отклонение σEL-AZ углов места и углов азимута спутников, передающих принимаемые радиоволны (Этап G2). Отметим, что комбинированное стандартное отклонение σEL-AZ выражается Математическим выражением 1 ниже. Также отметим, что когда не принимается радиоволна от спутника, комбинированное стандартное отклонение σEL-AZ является 0.
[0098] Математическое выражение 1

[0099] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно предварительно установленному пороговому значению THσEL-AZ (пороговое значение комбинированного стандартного отклонения) (Этап G3).
[0100] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно пороговому значению THσEL-AZ (ДА на Этапе G3), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (Этап G4) и завершает функционирование.
[0101] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута не меньше или равно пороговому значению THσEL-AZ (НЕТ на Этапе G3), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап G5) и завершает функционирование.
[0102] [Четвертое функционирование]
Четвертое функционирование будет описано посредством использования чертежа. Фиг. 10 является блок-схемой, схематично иллюстрирующей четвертое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления. Четвертое функционирование не только осуществляет определение нахождения в помещении/вне помещения, но также осуществляет определение рядом-с-окном/не-рядом-с-окном в случае в помещении, на основе комбинированного стандартного отклонения углов места и углов азимута спутников. Дополнительно, см. Фиг. 6 в отношении компонентов мобильного терминала.
[0103] Сначала, после прохождения через Этапы H1 и H2 идентичные Этапам G1 и G2 на Фиг. 9, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное комбинированное отклонение σEL-AZ углов места и углов азимута меньше или равно предварительно установленному пороговому значению THσEL-AZ_H (Этап H3).
[0104] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно пороговому значению THσEL-AZ_H (ДА на Этапе H3), блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно предварительно установленному пороговому значению THσEL-AZ_L (Этап H4). Предполагается, что THσEL-AZ_H больше THσEL-AZ_L.
[0105] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно пороговому значению THσEL-AZ_L (ДА на Этапе H4), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (не рядом с окном) (Этап H5) и завершает функционирование.
[0106] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута не меньше или равно пороговому значению THσEL-AZ_L (НЕТ на Этапе H4), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (рядом с окном) (Этап H6) и завершает функционирование.
[0107] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута не меньше или равно пороговому значению THσEL-AZ_H (НЕТ на Этапе H3), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап H7) и завершает функционирование.
[0108] [Пятое функционирование]
Пятое функционирование будет описано посредством использования чертежей. Фиг. 11 является блок-схемой, схематично иллюстрирующей пятое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления. Фиг. 12 является планом неба спутников GPS для иллюстрации трехмерной (3D) зоны азимута, вычисляемой в пятом функционировании блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления. Пятое функционирование осуществляет определение нахождения в помещении/вне помещения, на основе 3D зоны азимута спутников. Дополнительно, см. Фиг. 6 в отношении компонентов мобильного терминала.
[0109] Сначала, после прохождения через Этап K1 идентичный Этапу H1 на Фиг. 10, блок 4 определения классификации среды в помещении/вне помещения вычисляет 3D зону азимута спутников, передающих принимаемые радиоволны (Этап K2).
[0110] Отметим, что, например, 3D зона азимута спутников может быть вычислена посредством зоны у заштрихованной части, иллюстрируемой на Фиг. 12. В частности, на Фиг. 12, углы места и углы азимута всех спутников, передающих принимаемые радиоволны, построены в координатах на плоскости, именуемой планом неба, на котором координаты востока при угле места 0 обозначаются как (1,0), координаты запада обозначаются как (-1,0), координаты юга обозначаются как (0,-1), и координаты зенита обозначаются как (0,0), и тогда, находится зона минимального сектора на плане неба, включающая в себя координаты всех спутников. Отметим, что минимальный сектор предполагается как сектор, центрированный вокруг координат (0,0) зенита.
[0111] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленная 3D зона азимута меньше или равна предварительно установленному пороговому значению TH3D (пороговое значение 3D зоны азимута) (Этап K3).
[0112] Когда 3D зона азимута меньше или равна пороговому значению TH3D (ДА на Этапе K3), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (Этап K4) и завершает функционирование.
[0113] Когда 3D зона азимута не меньше или равна пороговому значению TH3D (НЕТ на Этапе K3), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильны терминал 1 располагается вне помещения (Этап K5) и завершает функционирование.
[0114] [Шестое функционирование]
Шестое функционирование будет описано посредством использования чертежей. Фиг. 13 является блок-схемой, схематично иллюстрирующей шестое функционирование блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления. Фиг. 14 является планом неба спутников GPS для иллюстрации степени смещения к малому углу места и особому азимуту, причем смещение вычисляется в шестом функционировании блока определения классификации среды в помещении/вне помещения в мобильном терминале в системе определения нахождения в помещении/вне помещения в соответствии со вторым примерным вариантом осуществления. Шестое функционирование осуществляет определение нахождения в помещении/вне помещения, на основе степени смещения спутников к малому углу места и особому направлению. Дополнительно, см. Фиг. 6 в отношении компонентов мобильного терминала.
[0115] Сначала, после прохождения через Этап L1 идентичный Этапу K1 на Фиг. 11, блок 4 определения классификации среды в помещении/вне помещения вычисляет степень смещения спутников, передающих принимаемые радиоволны, к малому углу места (например, больше или равного 0° и меньше 45°) и особому направлению (Этап K2).
[0116] Отметим, что, например, после построения всех спутников, передающих принимаемые радиоволны в координатах на плоскости, именуемой планом неба, описанным на Фиг. 12, и нахождения барицентра координат спутников, степень смещения спутников к малому углу места и особому направлению определяется как расстояние между барицентром координат спутников и координатами зенита, как иллюстрируется на Фиг. 14. Определенное значение указывает, что по мере того, как расстояние между барицентром координат спутников и координатами зенита становится длиннее, т.е. увеличивается, спутники накланяются больше в направлении малого угла места и особого азимута.
[0117] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленная степень смещения к малому углу места и особому направлению меньше или равна предварительно установленному пороговому значению THEL_L-AZ (пороговое значение степени смещения) (Этап L3).
[0118] Когда степень смещения к малому углу места и особому направлению меньше или равна пороговому значению THEL_L-AZ (ДА на Этапе L3), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (Этап L4) и завершает функционирование.
[0119] Когда степень смещения к малому углу места и особому направлению не меньше или равна пороговому значению THEL_L-AZ (НЕТ на Этапе L3), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап L5) и завершает функционирование.
[0120] Второй примерный вариант осуществления способен обеспечить определение нахождения в помещении/вне помещения с еще более высокой точностью, чем первый примерный вариант осуществления. Причина этого состоит в том, что второй примерный вариант осуществления добавляет индикатор определения, являющийся апертурным углом в горизонтальной плоскости в направлении окна здания изнутри, в дополнение к апертурному углу окна в вертикальной плоскости, который иллюстрируется в первом примерном варианте осуществления, и, вследствие этого, способен более точно захватывать характеристики в помещении и осуществлять определение нахождения в помещении/вне помещения.
[0121] [Третий примерный вариант осуществления]
Система определения нахождения в помещении/вне помещения в соответствии с третьим примерным вариантом осуществления будет описана посредством использования чертежей. Фиг. 15 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с третьим примерным вариантом осуществления.
[0122] Третий примерный вариант осуществления является модифицированным примером второго примерного варианта осуществления (см. Фиг. 6) и осуществляет определение нахождения в помещении/вне помещения и определение рядом-с-окном/не-рядом-с-окном в случае в помещении, на основе информации, включающей в себя информацию высоты над землей, где находится мобильный терминал 1. Мобильный терминал 1 включает в себя блок 9 извлечения высоты над землей и датчик 11 в качестве средства получения информации высоты над землей.
[0123] Блок 9 извлечения высоты над землей является функциональным блоком, извлекающим высоту над землей посредством использования информации (например, атмосферного давления), обнаруженной датчиком 11. Блок 9 извлечения высоты над землей выводит извлеченную информацию высоты над землей на блок 4 определения классификации среды в помещении/вне помещения и блок 5 передачи данных. Блок 9 извлечения высоты над землей может быть предоставлен посредством компьютера, исполняющего программное обеспечение или посредством интегральной микросхемы.
[0124] Например, датчик атмосферного давления, обнаруживающий атмосферное давление, может быть использован в качестве датчика 11. В этом случае, высота над землей может быть вычислена из информации атмосферного давления, обнаруженной посредством датчика атмосферного давления. Кроме того, например, датчик маяка, принимающий информацию маяка (включающую в себя информацию высоты над землей) может быть использован в качестве датчика 11, причем датчик маяка инсталлирован на предварительно определенной высоте над землей. В этом случае, поскольку информация маяка, принятая датчиком маяка, включает в себя информацию высоты над землей, информация маяка может быть использована как есть. Кроме того, например, датчик ускорения может быть использован в качестве датчика 11. В случае датчика ускорения, информация высоты над землей может быть вычислена посредством временного интегрирования восходящего ускорения в информацию скорости с известным местоположением в качестве начальной точки и дальнейшего выполнения временного интегрирования для того, чтобы найти расстояние восходящего перемещения. Дополнительно, число датчиков 11 не ограничивается одним, и множество датчиков описанных выше могут быть объединены для того, чтобы вычислять высокоточную информацию высоты над землей.
[0125] Блок 4 определения классификации среды в помещении/вне помещения имеет функцию определения классификации среды в помещении/вне помещения, на основе информации, включающей в себя информацию высоты над землей. Блок 5 передачи данных выполнен с возможностью передачи данных, включающих в себя информацию высоты над землей. Оставшаяся конфигурация является сходной с той, что в соответствии с примерным вариантом 2 осуществления. Кроме того, методика определения, использующая информацию высоты над землей, такая как третьего примерного варианта осуществления, может быть применена к первому примерному варианту осуществления.
[0126] Касательно функционирования мобильного терминала 1 в системе определения нахождения в помещении/вне помещения в соответствии с третьим примерным вариантом осуществления, блок 9 извлечения высоты над землей выводит извлеченную информацию высоты над землей на блок 4 определения классификации среды в помещении/вне помещения и блок 5 передачи данных. Далее, блок 4 определения классификации среды в помещении/вне помещения принимает информацию высоты над землей от блока 9 извлечения высоты над землей, определяет классификацию среды для позиции, где присутствует мобильный терминал 1, в соответствии с предварительно определенным функционированием, на основе принятой информации высоты над землей и информации (позиционной информации, информации угла места спутника, информации угла азимута спутника) от приемника 3 GPS, и выводит результирующую информацию определения на блок 5 передачи данных. Отметим, что предварительно определенное функционирование будет описано позже. Оставшееся функционирование является сходным с тем, что в соответствии с примерным вариантом 2 осуществления.
[0127] Далее, предварительно определенное функционирование будет описано посредством использования чертежа. Фиг. 16 является блок-схемой, схематично иллюстрирующей функционирование мобильного терминала в системе определения нахождения в помещении/вне помещения в соответствии с третьим примерным вариантом осуществления. Функционирование устанавливает пороговые значения THσEL-AZ_H и THσEL-AZ_L на основе информации высоты над землей, при осуществлении определения нахождения в помещении/вне помещения и определения нахождения рядом-с-окном/не-рядом-с-окном в случае в помещении, на основе комбинированного стандартного отклонения углов места и углов азимута спутников. Дополнительно, см. Фиг. 15 в отношении компонентов мобильного терминала.
[0128] Сначала, после прохождения через Этапы M1 и M2 идентичные Этапам H1 и H2 на Фиг. 10, блок 4 определения классификации среды в помещении/вне помещения получает информацию высоты над землей от блока 9 извлечения высоты над землей (Этап M3).
[0129] Далее, на основе полученной информации высоты над землей, блок 4 определения классификации среды в помещении/вне помещения устанавливает пороговые значения THσEL-AZ_H (первое пороговое значение комбинированного стандартного отклонения) и THσEL-AZ_L (второе пороговое значение комбинированного стандартного отклонения) (Этап M4). Отметим, что в целом, присутствует тенденция того, что смещение распределения угла места или распределения азимута плоскости спутников, передающих принимаемые радиоволны, часто расширяется в местоположении с большой высотой над землей. Соответственно, на этапе M4, величина пороговых значений THσEL-AZ_H и THσEL-AZ_L устанавливаются на основе полученной информации высоты над землей. Кроме того, предполагается, что THσEL-AZ_H больше THσEL-AZ_L.
[0130] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно пороговому значению THσEL-AZ_H (Этап M5).
[0131] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно пороговому значению THσEL-AZ_H (ДА на Этапе M5), блок 4 определения классификации среды в помещении/вне помещения оценивает, является ли вычисленное комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно предварительно установленному пороговому значению THσEL-AZ_L (Этап M6).
[0132] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно пороговому значению THσEL-AZ_L (ДА на Этапе M6), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (не рядом с окном) (Этап M7) и завершает функционирование.
[0133] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута не меньше или равно пороговому значению THσEL-AZ_L (Нет на Этапе M6), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (рядом с окном) (Этап 8) и завершает функционирование.
[0134] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута не меньше или равно пороговому значению THσEL-AZ_H (НЕТ на Этапе M5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап M9) и завершает функционирование.
[0135] Третий примерный вариант осуществления предоставляет результат обеспечения определения нахождения в помещении/вне помещения с еще более высокой точностью, чем первый примерный вариант осуществления. Причина этого состоит в том, что подходящее пороговое значение определения нахождения в помещении/вне помещения, основанное на высоте над землей, может быть определено с учетом тенденции того, что уменьшаются окружающие здания, и открытое небо и более хорошая видимость часто становятся доступными в местоположении с большой высотой над землей, и, вследствие этого, расширяется смещение распределения угла места и распределения азимута плоскости спутников, передающих принимаемые радиоволны.
[0136] [Четвертый примерный вариант осуществления]
Система определения нахождения в помещении/вне помещения в соответствии с четвертым примерным вариантом осуществления будет описана посредством использования чертежей. Фиг. 17 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с четвертым примерным вариантом осуществления.
[0137] Четвертый примерный вариант осуществления является модифицированным примером третьего примерного варианта осуществления (см. Фиг. 15) и осуществляет определение нахождения в помещении/вне помещения, определение рядом-с-окном/не-рядом-с-окном в случае в помещении, определение внутри-метро/не-внутри-метро в случае не-рядом-с-окном, и определение внутри-наземного-транспортного-средства (например, крытого поезда и автомобиля)/не-внутри-наземного-транспортного-средства в случае рядом-с-окном, на основе информации, включающей в себя информацию скорости движения мобильного терминала 1. Мобильный терминал 1 включает в себя блок 10 извлечения скорости движения и источник 12 информации в качестве средства получения информации скорости движения.
[0138] Блок 10 извлечения скорости движения является функциональным блоком, извлекающим информацию скорости движения, на основе информации от источника 12 информации. Блок 10 извлечения скорости движения выводит извлеченную информацию скорости движения на блок 5 определения классификации среды в помещении/вне помещения и блок 5 передачи данных. Блок 10 извлечения скорости движения может быть предоставлен посредством компьютера, исполняющего программное обеспечение или посредством интегральной микросхемы.
[0139] Источник 12 информации является функциональным блоком, выводящим информацию, которая является основой для извлечения скорости движения в блоке извлечения скорости движения. Например, датчик ускорения может быть использован в качестве источника 12 информации. В данном случае, информация скорости движения может быть вычислена посредством временного интегрирования ускорения в горизонтальном направлении. Кроме того, например, приемник 3 GPS может быть использован в качестве источника 12 информации. В этом случае, может быть приведено средство вычисления скорости движения из временной разности результата позиционирования посредством приемника 3 GPS. Кроме того, например, блок приема данных может быть использован в качестве источника 12 информации. В этом случае, блок приема данных может принимать множество ID сотовых базовых станций (известные местоположения) и вычислять скорость движения из временной разности между ними. Кроме того, например, датчик маяка (датчик 11) может быть использован в качестве источника 12 информации. В этом случае, фрагменты информации маяка могут быть приняты от маяка, инсталлированного в предварительно определенном местоположении, и скорость движения может быть вычислена из временной разности между ними. Кроме того, источник 12 информации может объединять источники информации, описанные выше, и вычислять высокоточную информацию скорости движения.
[0140] Блок 4 определения классификации среды в помещении/вне помещения обладает функцией определения классификации среды в помещении/вне помещения, на основе информации, включающей в себя скорость движения. Блок 5 передачи данных выполнен с возможностью передачи данных, включающих в себя информацию скорости движения. Оставшаяся конфигурация является сходной с той, что в соответствии с примерным вариантом 3 осуществления. Кроме того, методика определения используя информацию скорости движения, такая как четвертого примерного варианта осуществления, может быть применена к первому или второму примерному варианту осуществления.
[0141] Касательно функционирования мобильного терминала 1 в системе определения нахождения в помещении/вне помещения в соответствии с четвертым примерным вариантом осуществления, блок 10 извлечения скорости движения выводит извлеченную информацию скорости движения на блок 4 определения классификации среды в помещении/вне помещения и блок 5 передачи данных. Далее, блок 4 определения классификации среды в помещении/вне помещения принимает информацию скорости движения от блока 10 извлечения скорости движения, определяет классификацию среды в позиции, в которой находится мобильный терминал 1, в соответствии с предварительно определенным функционированием, на основе принятой информации скорости движения, информации (позиционной информации, информации угла места спутника, и информации угла азимута спутника) от приемника 3 GPS, и информации высоты над землей от блока 9 извлечения высоты над землей, и выводит результирующую информацию определения на блок 5 передачи данных. Отметим, что предварительно определенное функционирование будет описано позже. Оставшееся функционирование является сходным с тем, что в соответствии с примерным вариантом 3 осуществления.
[0142] Далее, предварительно определенное функционирование будет описано посредством использования чертежа. Фиг. 18 является блок-схемой, схематично иллюстрирующей функционирование мобильного терминала в системе определения нахождения в помещении/вне помещения в соответствии с четвертым примерным вариантом осуществления. Функционирование осуществляет определение нахождения в помещении/вне помещения, определение рядом-с-окном/не-рядом-с-окном в случае в помещении, определение внутри-метро/не-внутри-метро в случае не-рядом-с-окном, и определение внутри-наземного-транспортного-средства/не-внутри-наземного-транспортного-средства в случае рядом-с-окном, на основе комбинированного стандартного отклонения углов места и углов азимута спутников. Дополнительно, см. Фиг. 17 в отношении компонентов мобильного терминала.
[0143] Сначала, после прохождения через Этапы с N1 по N6 идентичные Этапам с M1 по M6 на Фиг. 16, когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута меньше или равно пороговому значению THσEL-AZ_L (ДА на Этапе N6), блок 4 определения классификации среды в помещении/вне помещения получает информацию скорости движения от блока 10 извлечения информации скорости движения (Этап N7).
[0144] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является или нет скорость движения, включенная в полученную информации скорости движения, больше или равна пороговому значению THMET (первое пороговое значение скорости движения) (Этап N8).
[0145] Когда скорость движения больше или равна пороговому значению THMET (ДА на Этапе N8), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (не рядом с окном) внутри метро (Этап N9) и завершает функционирование.
[0146] Когда скорость движения не больше или равна пороговому значению THMET (НЕТ на Этапе N8), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (не рядом с окном) отличном от внутри метро (Этап N10) и завершает функционирование.
[0147] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута не меньше или равно пороговому значению THσEL-AZ_L (НЕТ на Этапе N6), блок 4 определения классификации среды в помещении/вне помещения получает информацию скорости движения от блока 10 извлечения информации движения (Этап N11).
[0148] Далее, блок 4 определения классификации среды в помещении/вне помещения оценивает, является или нет скорость движения, включенная в полученную информацию скорости движения больше или равна пороговому значению THVEN (второе пороговое значение скорости движения) (Этап N12). Отметим, что пороговое значение THVEN может быть идентичным или отличным от порогового значения THMET.
[0149] Когда скорость движения больше или равна пороговому значению THVEN (ДА на Этапе N12), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (рядом с окном) внутри наземного транспортного средства (Этап N13) и завершает функционирование.
[0150] Когда скорость движение не больше или равна пороговому значению THVEN (НЕТ на Этапе N12), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается в помещении (рядом с окном) отличном от внутри наземного транспортного средства (Этап N14) и завершает функционирование.
[0151] Когда комбинированное стандартное отклонение σEL-AZ углов места и углов азимута не меньше или равно пороговому значению THσEL-AZ_H (НЕТ на Этапе N5), блок 4 определения классификации среды в помещении/вне помещения определяет, что мобильный терминал 1 располагается вне помещения (Этап N15) и завершает функционирование.
[0152] Четвертый примерный вариант осуществления способен увеличить типы определений классификации до «внутри наземного транспортного средства» и «внутри метро» в среде в помещении в дополнение к «в помещении не рядом с окном» и «в помещении рядом с окном», которые являются определениями для местоположений в помещении в соответствии с третьим примерным вариантом осуществления. В частности, поскольку внутри наземного транспортного средства также может быть классифицировано, как движущееся среда в помещении, посредством объединения отклонения направлений в которых присутствуют спутники, передающие принимаемые радиоволны, с информацией скорости движения, определение «внутри-наземного-транспортного-средства» может быть осуществлено посредством добавления определения, основанного на информации скорости движения, к результату, классифицированному как «в помещении рядом с окном». Кроме того, случай, когда движение распознается близко к замкнутому пространству, где отсутствуют спутники, передающие принимаемые радиоволны, он может быть рассмотрен как внутри метро, и, вследствие этого, посредством применения определения, основанного на информации скорости движения, к результату, классифицированному как «внутри помещения не рядом с окном», может быть осуществлено определение «внутри-метро».
[0153] [Пятый примерный вариант осуществления]
Система определения нахождения в помещении/вне помещения в соответствии с пятым примерным вариантом осуществления будет описана посредством использования чертежа. Фиг. 19 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с пятым примерным вариантом осуществления.
[0154] Пятый примерный вариант осуществления является модифицированным примером четвертого примерного варианта осуществления (см. Фиг. 17), и блок 21 определения классификации среды в помещении/вне помещения организован вне мобильного терминала 1 вместо блока (4 на Фиг. 17) определения классификации среды в помещении/вне помещения внутри мобильного терминала (1 на Фиг. 17).
[0155] Мобильный терминал 1 передает данные, требуемые для определения, серверу 7 данных через сеть 6.
[0156] Сервер 7 данных обладает функцией накопления данных от мобильного терминала 1 и передачи части накопленных данных блоку 21 определения классификации среды в помещении/вне помещения в ответ на запрос от блока 21 определения классификации среды в помещении/вне помещения.
[0157] Блок 21 определения классификации среды в помещении/вне помещения организован между сервером 7 данных и блоком 8 визуализации классификации среды в помещении/вне помещения. Блок 21 определения классификации среды в помещении/вне помещения определяет классификацию среды в позиции, в которой находится мобильный терминал 1, в соответствии с предварительно определенным функционированием, и выводит результат на блок 8 визуализации классификации среды в помещении/вне помещения. Предварительно определенное функционирование является сходным с предварительно определенным функционированием в соответствии с четвертым примерным вариантом осуществления, и могут быть выполнены предварительно определенные функционирования в соответствии с примерными вариантами осуществления с первого по третий.
[0158] Оставшаяся конфигурация является сходной с той, что в соответствии с четвертым примерным вариантом осуществления. Кроме того, конфигурация организации блока 21 определения классификации среды в помещении/вне помещения между сервером 7 данных и блоком 8 визуализации классификации среды в помещении/вне помещения может быть применена к примерным вариантам осуществления с первого по третий.
[0159] Функционирование в соответствии с пятым примерным вариантом осуществления отличается от функционирования в соответствии с четвертым примерным вариантом осуществления только тем, что обработка в блоке 21 определения классификации среды в помещении/вне помещения выполняется между обработкой в сервере 7 данных и обработкой в блоке 8 визуализации классификации среды в помещении/вне помещения, а оставшиеся функционирования являются идентичными.
[0160] Пятый примерный вариант осуществления обеспечивает результат в том, что нагрузка обработки, включенная в определение нахождения в помещении/вне помещения, на мобильном терминале может быть уменьшена, и потребление питания может быть сдержано, в сравнении с четвертым примерным вариантом осуществления. Причина этого состоит в том, что объект обработки определения нахождения в помещении/вне помещения предоставлен вне мобильного терминала 1 вместо того, чтобы внутри мобильного терминала 1, в соответствии с пятым примерным вариантом осуществления. В целом, в то время, как центральный блок обработки (CPU) на мобильном терминале 1 часто демонстрирует низкую производительность из-за уменьшения размеров, пятый примерный вариант осуществления является значительно эффективнее, когда производительность мобильного терминала 1 низкая.
[0161] [Шестой примерный вариант осуществления]
Система определения нахождения в помещении/вне помещения в соответствии с шестым примерным вариантом осуществления будет описана посредством использования чертежей. Фиг. 20 является структурной схемой, схематично иллюстрирующей конфигурацию системы определения нахождения в помещении/вне помещения в соответствии с шестым примерным вариантом осуществления. Фиг. 21 является блок-схемой, схематично иллюстрирующей функционирование блока определения классификации среды в помещении/вне помещения в системе определения нахождения в помещении/вне помещения в соответствии с шестым примерным вариантом осуществления.
[0162] Система 100 определения нахождения в помещении/вне помещения является системой, определяющей, присутствует ли мобильный терминал 1 в помещении или вне помещения (см. Фиг. 20). Система 100 определения нахождения в помещении/вне помещения включает в себя блок 31 определения классификации среды в помещении/вне помещения. Блок 31 определения классификации среды в помещении/вне помещения является функциональным блоком, предоставленным посредством исполнения программы определения нахождения в помещении/вне помещения, определяющей, посредством использования ресурса аппаратного обеспечения, присутствует ли мобильный терминал в помещении или вне помещения. Блок 31 определения классификации среды в помещении/вне помещения получает, по меньшей мере, любую из информации угла места спутника и информации угла азимута спутника непосредственно или опосредованно от спутникового приемника 30, предусмотренного в мобильном терминале 1 (Этап S1 на Фиг. 21). Блок 31 определения классификации среды в помещении/вне помещения определяет, присутствует ли мобильный терминал 1 в помещении или вне помещения, на основе, по меньшей мере, любой из информации угла места спутника и информации угла азимута спутника (Этап S2 на Фиг. 21). Отметим, что в то время, как блок 31 определения классификации среды в помещении/вне помещения присутствует внутри мобильного терминала 1 на Фиг. 20, блок может присутствовать вне мобильного терминала 1.
[0163] Шестой примерный вариант осуществления способен обеспечить определение нахождения в помещении/вне помещения посредством создания, в качестве индикатора, физической статистики, представляющей собой то свойство, что направления спутников, передающих радиоволны, принимаемые в здании, склоняются к малому углу места, и, вследствие этого, способен осуществлять определение нахождения в помещении/вне помещения с более высокой точностью, чем способ определения, основанный на спутниковой силе приема, причем установка порогового значения посредством способа является более сложной.
[0164] Все или часть примерных вариантов осуществления, раскрытых выше, могут быть описаны в качестве, но не ограничиваясь, следующих дополнительных примечаний.
[0165] [Дополнительные примечания]
Настоящее изобретение способно предоставить форму программы определения нахождения в помещении/вне помещения в соответствии с первым аспектом.
[0166] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа подсчета первого количества спутников, присутствующих в первом диапазоне угла места, на основе информации угла места спутника; этапа подсчета второго количества спутников, присутствующих во втором диапазоне угла места более высоком, чем первый диапазон угла места, на основе информации угла места спутника; этапа вычисления соотношения количества спутников между первым количеством спутников и вторым количеством спутников; этапа осуществления определения для местоположений в помещении, когда соотношение количества спутников больше или равно пороговому значению соотношения количества спутников, которое является предварительно установленным; и этапа осуществления определения нахождения вне помещения, когда соотношение количества спутников не больше или равно пороговому значению соотношения количества спутников.
[0167] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа подсчета первого количества спутников, присутствующих в первом диапазоне угла места, на основе информации угла места спутника; этапа подсчета второго количества спутников, присутствующих во втором диапазоне угла места более высоком, чем первый диапазон угла места, на основе информации угла места спутника; этапа вычисления соотношения количества спутников между первым количеством спутников и вторым количеством спутников; этапа осуществления определения нахождения вне помещения, когда соотношение количества спутников не больше или равно первому пороговому значению соотношения количества спутников, которое является предварительно установленным; этапа оценки, является или нет соотношение количества спутников больше или равно второму пороговому значению соотношения количества спутников, которое больше первого порогового значения соотношения количества спутников, когда соотношение количества спутников больше или равно первому пороговому значению соотношения количества спутников; этапа осуществления определения нахождения в помещении и не-рядом-с-окном, когда соотношение количества спутников больше или равно второму пороговому значению соотношения количества спутников; и этапа осуществления определения нахождения в помещении и рядом-с-окном, когда соотношение количества спутников не больше или равно второму пороговому значению соотношения количества спутников.
[0168] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления среднего угла места, максимального угла места, и стандартного отклонения угла места, на основе информации угла места спутника; этапа осуществления определения нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; этапа осуществления определения нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; этапа осуществления определения нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно пороговому значению стандартного отклонения угла места, которое является предварительно установленным; и этапа осуществления определения для местоположений в помещении, когда средний угол места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно пороговому значению стандартного отклонения угла места.
[0169] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления среднего угла места, максимального угла места, и стандартного отклонения угла места, на основе информации угла места спутника; этапа осуществления определения нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; этапа осуществления определения нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; этапа осуществления определения нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; этапа, когда среднее значение угла места меньше или равно пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места, оценки, является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения угла места; этапа осуществления определения нахождения в помещении и не-рядом-с-окном, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; и этапа осуществления определения нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места.
[0170] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления среднего угла места, максимального угла места, и стандартного отклонения угла места, на основе информации угла места спутника; этапа осуществления определения нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; этапа осуществления определения нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; этапа осуществления определения нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; этапа, когда средний угла места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места, оценки является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения угла места; этапа осуществления определения нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места; этапа вычисления ширины азимута у спутника, передающего принимаемую радиоволну, на основе информации угла азимута спутника, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; этапа осуществления определения нахождения в помещении и не-рядом-с-окном, когда ширина азимута меньше или равна пороговому значению ширины азимута, которое является предварительно установленным; и этапа осуществления определения нахождения в помещении и рядом-с-окном, когда ширина азимута не меньше или равна пороговому значению ширины азимута.
[0171] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления среднего угла места, максимального угла места, и стандартного отклонения угла места, на основе информации угла места спутника; этапа осуществления определения нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; этапа осуществления определения нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; этапа осуществления определения нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; этапа оценки, является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения узла места, которое является предварительно установленным, когда средний угол места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места; этапа осуществления определения нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места; этапа вычисления стандартного отклонения угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла азимута спутника, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; этапа осуществления определения нахождения в помещении и не-рядом-с-окном, когда стандартное отклонение угла азимута меньше или равно пороговому значению стандартного отклонения угла азимута, которое является предварительно установленным; и этапа осуществления определения нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла азимута не меньше или равно пороговому значению стандартного отклонения угла азимута.
[0172] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления комбинированного стандартного отклонения угла места и угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; этапа осуществления определения для местоположений в помещении, когда комбинированное стандартное отклонение меньше или равно пороговому значению комбинированного стандартного отклонения, которое является предварительно установленным; и этапа осуществления определения нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно пороговому значению комбинированного стандартного отклонения.
[0173] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления комбинированного стандартного отклонения угла места и угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; этапа осуществления определения нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения, которое является предварительно установленным; этапа оценки, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; этапа осуществления определения нахождения в помещении и не-рядом-с-окном, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; и этапа осуществления определения нахождения в помещении и рядом-с-окном, когда комбинированное стандартное отклонение не меньше или равно второму пороговому значению комбинированного стандартного отклонения.
[0174] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления 3D зоны азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; этапа осуществления определения для местоположений в помещении, когда 3D зона азимута меньше или равна пороговому значению 3D зоны азимута, которое является предварительно установленным; и этапа осуществления определения нахождения вне помещения, когда 3D зона азимута не меньше или равна пороговому значению 3D зоны азимута.
[0175] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления степени смещения спутника, передающего принимаемую радиоволну, к предварительно определенному углу места и особому направлению, на основе информации угла места спутника и информации угла азимута спутника; этапа осуществления определения для местоположений в помещении, когда степень смещения меньше или равна пороговому значению степени смещения, которое является предварительно установленным; и этапа осуществления определения нахождения вне помещения, когда степень смещения не меньше или равна пороговому значению степени смещения.
[0176] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления комбинированного стандартного отклонения угла места и угла азимута спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; этапа установки первого порогового значения стандартного отклонения и второго порогового значения стандартного отклонения, которое меньше первого порогового значения стандартного отклонения, на основе информации высоты над землей непосредственно или опосредованно полученной от средства извлечения высоты над землей, предусмотренного в мобильном терминале; этапа осуществления определения нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения; этапа оценки, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; этапа осуществления определения нахождения в помещении и не-рядом-с-окном, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; и этапа осуществления определения нахождения в помещении и рядом-с-окном, когда комбинированное стандартное отклонение не меньше или равно второму пороговому значению комбинированного стандартного отклонения.
[0177] Программа определения нахождения в помещении/вне помещения, в соответствии с первым аспектом, предписывает исполнение: этапа вычисления комбинированного стандартного отклонения угла места и угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; этапа установки первого порогового значения стандартного отклонения и второго порогового значения стандартного отклонения, которое меньше первого порогового значения стандартного отклонения, на основе информации высоты над землей непосредственно или опосредованно полученной от средства извлечения высоты над землей, предусмотренного в мобильном терминале; этапа осуществления определения нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения; этапа оценки, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; этапа оценки, является или нет информация скорости движения непосредственно или опосредованно полученная от средства извлечения скорости движения, предусмотренного в мобильном терминале, больше или равна первому пороговому значению скорости движения, которое является предварительно установленным, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; этапа осуществления определения нахождения внутри-метро, когда информация скорости движения больше или равна первому пороговому значению скорости движения; этапа осуществления определения нахождения в помещении и не-рядом-с-окном, когда информация скорости движения не больше или равна первому пороговому значению скорости движения; этапа оценки, является или нет информация скорости движения непосредственно или опосредованно полученная от средства извлечения скорости движения больше или равна второму пороговому значению скорости движения, которое является предварительно установленным, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; этапа осуществления определения нахождения внутри-наземного-транспортного-средства, когда информация скорости движения больше или равна второму пороговому значению скорости движения; и этапа осуществления определения нахождения в помещении и рядом-с-окном, когда информация скорости движения не больше или равна второму пороговому значению скорости движения.
[0178] Настоящее изобретение способно предоставить форму системы определения нахождения в помещении/вне помещения в соответствии со вторым аспектом.
[0179] Настоящее изобретение способно предоставить форму системы определения нахождения в помещении/вне помещения в соответствии с третьим аспектом.
[0180] Мобильный терминал в системе определения нахождения в помещении/вне помещения, в соответствии с третьим аспектом, включает в себя датчик и блок извлечения высоты над землей, извлекающий высоту над землей посредством использования информации, обнаруженной датчиком.
[0181] Мобильный терминал в системе определения нахождения в помещении/вне помещения, в соответствии с третьим аспектом, включает в себя источник информации и блок извлечения скорости движения, извлекающий информацию скорости движения, на основе информации от источника информации.
[0182] Настоящее изобретение способно предоставить форму способа определения нахождения в помещении/вне помещения в соответствии с четвертым аспектом.
[0183] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: подсчитывают первое количество спутников, присутствующих в первом диапазоне угла места, на основе информации угла места спутника; подсчитывают второе количество спутников, присутствующих во втором диапазоне угла места более высоком, чем первый диапазон угла места, на основе информации угла места спутника; вычисляют соотношение количества спутников между первым количеством спутников и вторым количеством спутников; осуществляют определение для местоположений в помещении, когда соотношение количества спутников больше или равно пороговому значению соотношения количества спутников, которое является предварительно установленным; и осуществляют определение нахождения вне помещения, когда соотношение количества спутников не больше или равно пороговому значению соотношения количества спутников.
[0184] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: подсчитывают первое количество спутников, присутствующих в первом диапазоне угла места, на основе информации угла места спутника; подсчитывают второе количество спутников, присутствующих во втором диапазоне угла места более высоком, чем первый диапазон угла места, на основе информации угла места спутника; вычисляют соотношение количества спутников между первым количеством спутников и вторым количеством спутников; осуществляют определение нахождения вне помещения, когда соотношение количества спутников не больше или равно первому пороговому значению соотношения количества спутников, которое является предварительно установленным; оценивают, является или нет соотношение количества спутников больше или равно второму пороговому значению соотношения количества спутников, которое больше первого порогового значения соотношения количества спутников, когда соотношение количества спутников больше или равно первому пороговому значению соотношения количества спутников; осуществляют определение нахождения в помещении и не-рядом-с-окном, когда соотношение количества спутников больше или равно второму пороговому значению соотношения количества спутников; и осуществляют определение нахождения в помещении и рядом-с-окном, когда соотношение количества спутников не больше или равно второму пороговому значению соотношения количества спутников.
[0185] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют средний угол места, максимальный угол места, и стандартное отклонение угла места, на основе информации угла места спутника; осуществляют определение нахождения вне помещении, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; осуществляют определение нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; осуществляют определение нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно пороговому значению стандартного отклонения угла места, которое является предварительно установленным; и осуществляют определение для местоположений в помещении, когда средний угол места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно пороговому значению стандартного отклонения угла места.
[0186] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют средний угол места, максимальный угол места, и стандартное отклонение угла места, на основе информации угла места спутника; осуществляют определение нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; осуществляют определение нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; осуществляют определение нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; когда среднее значение угла места меньше или равно пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места, оценивают, является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения угла места; осуществляют определение нахождения в помещении и не-рядом-с-окном, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; и осуществляют определение нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места.
[0187] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют средний угол места, максимальный угол места, и стандартное отклонение угла места, на основе информации угла места спутника; осуществляют определение нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; осуществляют определение нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; осуществляют определение нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; когда средний угол места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места, оценивают является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения угла места; осуществляют определение нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места; вычисляют ширину азимута спутника, передающего принимаемую радиоволну, на основе информации угла азимута спутника, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; осуществляют определение нахождения в помещении и не-рядом-с-окном, когда ширина азимута меньше или равна пороговому значению ширины азимута, которое является предварительно установленным; и осуществляют определение нахождения в помещении и рядом-с-окном, когда ширина азимута не меньше или равна пороговому значению ширины азимута.
[0188] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют средний угол места, максимальный угол места, и стандартное отклонение угла места, на основе информации угла места спутника; осуществляют определение нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; осуществляют определение нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; осуществляют определение нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; когда средний угол места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места, оценивают, является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения узла места; осуществляют определение нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места; вычисляют стандартное отклонение угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла азимута спутника, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; осуществляют определение нахождения в помещении и не-рядом-с-окном, когда стандартное отклонение угла азимута меньше или равно пороговому значению стандартного отклонения угла азимута, которое является предварительно установленным; и осуществляют определение нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла азимута не меньше или равно пороговому значению стандартного отклонения угла азимута.
[0189] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют комбинированное стандартное отклонение угла места и угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; осуществляют определение для местоположений в помещении, когда комбинированное стандартное отклонение меньше или равно пороговому значению комбинированного стандартного отклонения, которое является предварительно установленным; и осуществляют определение нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно пороговому значению комбинированного стандартного отклонения.
[0190] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют комбинированное стандартное отклонение угла места и угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; осуществляют определение нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения, которое является предварительно установленным; оценивают, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; осуществляют определение нахождения в помещении и не-рядом-с-окном, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; и осуществляют определение нахождения в помещении и рядом-с-окном, когда комбинированное стандартное отклонение не меньше или равно второму пороговому значению комбинированного стандартного отклонения.
[0191] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют 3D зоны азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; осуществляют определение для местоположений в помещении, когда 3D зона азимута меньше или равна пороговому значению 3D зоны азимута, которое является предварительно установленным; и осуществляют определение нахождения вне помещения, когда 3D зона азимута не меньше или равна пороговому значению 3D зоны азимута.
[0192] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют степень смещения спутника, передающего принимаемую радиоволну, к предварительно определенному углу места и особому направлению, на основе информации угла места спутника и информации угла азимута спутника; осуществляют определение для местоположений в помещении, когда степень смещения меньше или равна пороговому значению степени смещения, которое является предварительно установленным; и осуществляют определение нахождения вне помещения, когда степень смещения не меньше или равна пороговому значению степени смещения.
[0193] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют комбинированное стандартное отклонение угла места и угла азимута спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; устанавливают первое пороговое значение стандартного отклонения и второе пороговое значения стандартного отклонения, которое меньше первого порогового значения стандартного отклонения, на основе информации высоты над землей непосредственно или опосредованно полученной от средства извлечения высоты над землей, предусмотренного в мобильном терминале; осуществляют определение нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения; оценивают, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; осуществляют определение нахождения в помещении и не-рядом-с-окном, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; и осуществляют определение нахождения в помещении и рядом-с-окном, когда комбинированное стандартное отклонение не меньше или равно второму пороговому значению комбинированного стандартного отклонения.
[0194] Способ определения нахождения в помещении/вне помещения, в соответствии с четвертым аспектом, включает в себя этапы, на которых: вычисляют комбинированное стандартное отклонение угла места и угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; устанавливают первое пороговое значение стандартного отклонения и второе пороговое значение стандартного отклонения, которое меньше первого порогового значения стандартного отклонения, на основе информации высоты над землей непосредственно или опосредованно полученной от средства извлечения высоты над землей, предусмотренного в мобильном терминале; осуществляют определение нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения; оценивают, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; оценивают, является или нет информация скорости движения, непосредственно или опосредованно полученная от средства извлечения скорости движения, предусмотренного в мобильном терминале, больше или равна первому пороговому значению скорости движения, которое является предварительно установленным, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; осуществляют определение внутри-метро, когда информация скорости движения больше или равна первому пороговому значению скорости движения; осуществляют определение нахождения в помещении и не-рядом-с-окном, когда информация скорости движения не больше или равна первому пороговому значению скорости движения; оценивают, является или нет информация скорости движения непосредственно или опосредованно полученная от средства извлечения скорости движения больше или равна второму пороговому значению скорости движения, которое является предварительно установленным, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; осуществляют определение внутри-наземного-транспортного-средства, когда информация скорости движения больше или равна второму пороговому значению скорости движения; и осуществляют определение нахождения в помещении и рядом-с-окном, когда информация скорости движения не больше или равна второму пороговому значению скорости движения.
[0195] Настоящее изобретение способно предоставить форму мобильного терминала в соответствии с пятым аспектом.
[0196] Мобильный терминал, в соответствии с пятым аспектом, включает в себя датчик и блок извлечения высоты над землей для извлечения высоты над землей посредством использования информации, обнаруженной датчиком.
[0197] Мобильный терминал, в соответствии с пятым аспектом, включает в себя источник информации и блок извлечения скорости движения для извлечения информации скорости движения, на основе информации от источника информации.
[0198] Настоящее изобретение способно предоставить форму блока определения классификации среды в помещении/вне помещения в соответствии с шестым аспектом.
[0199] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, подсчитывает первое количество спутников, присутствующих в первом диапазоне угла места, на основе информации угла места спутника и также подсчитывает второе количество спутников, присутствующих во втором диапазоне угла места более высоком, чем первый диапазон угла места, на основе информации угла места спутника, вычисляет соотношение количества спутников между первым количеством спутников и вторым количеством спутников, осуществляет определение для местоположений в помещении, когда соотношение количества спутников больше или равно пороговому значению соотношения количества спутников, которое является предварительно установленным, и осуществляет определение нахождения вне помещения, когда соотношение количества спутников не больше или равно пороговому значению соотношения количества спутников.
[0200] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, подсчитывает первое количество спутников, присутствующих в первом диапазоне угла места, на основе информации угла места спутника; подсчитывает второе количество спутников, присутствующих во втором диапазоне угла места более высоком, чем первый диапазон угла места, на основе информации угла места спутника; вычисляет соотношение количества спутников между первым количеством спутников и вторым количеством спутников; осуществляет определение нахождения вне помещения, когда соотношение количества спутников не больше или равно первому пороговому значению соотношения количества спутников, которое является предварительно установленным; оценивает, является или нет соотношение количества спутников больше или равно второму пороговому значению соотношения количества спутников, которое больше первого порогового значения соотношения количества спутников, когда соотношение количества спутников больше или равно первому пороговому значению соотношения количества спутников; осуществляет определение нахождения в помещении и не-рядом-с-окном, когда соотношение количества спутников больше или равно второму пороговому значению соотношения количества спутников; и осуществляет определение нахождения в помещении и рядом-с-окном, когда соотношение количества спутников не больше или равно второму пороговому значению соотношения количества спутников.
[0201] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет средний угол места, максимальный угол места, и стандартное отклонение угла места, на основе информации угла места спутника; осуществляет определение нахождения вне помещении, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; осуществляет определение нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; осуществляет определение нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно пороговому значению стандартного отклонения угла места, которое является предварительно установленным; и осуществляет определение для местоположений в помещении, когда средний угол места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно пороговому значению стандартного отклонения угла места.
[0202] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет средний угол места, максимальный угол места и стандартное отклонение угла места на основе информации угла места спутника; осуществляет определение нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; осуществляет определение нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; осуществляет определение нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; когда среднее значение угла места меньше или равно пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места, оценивает, является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения угла места; осуществляет определение нахождения в помещении и не-рядом-с-окном, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; и осуществляет определение нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места.
[0203] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет средний угол места, максимальный угол места и стандартное отклонение угла места на основе информации угла места спутника; осуществляет определение нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; осуществляет определение нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; осуществляет определение нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; когда средний угол места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места, оценивает является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения угла места; осуществляет определение нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места; вычисляет ширину азимута спутника, передающего принимаемую радиоволну, на основе информации угла азимута спутника, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; осуществляет определение нахождения в помещении и не-рядом-с-окном, когда ширина азимута меньше или равна пороговому значению ширины азимута, которое является предварительно установленным; и осуществляет определение нахождения в помещении и рядом-с-окном, когда ширина азимута не меньше или равна пороговому значению ширины азимута.
[0204] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет средний угол места, максимальный угол места, и стандартное отклонение угла места, на основе информации угла места спутника; осуществляет определение нахождения вне помещения, когда средний угол места не меньше или равен пороговому значению среднего угла места, которое является предварительно установленным; осуществляет определение нахождения вне помещения, когда максимальный угол места не меньше или равен пороговому значению максимального угла места, которое является предварительно установленным; осуществляет определение нахождения вне помещения, когда стандартное отклонение угла места не меньше или равно первому пороговому значению стандартного отклонения угла места, которое является предварительно установленным; когда средний угол места меньше или равен пороговому значению среднего угла места, максимальный угол места меньше или равен пороговому значению максимального угла места, и стандартное отклонение угла места меньше или равно первому пороговому значению стандартного отклонения угла места, оценивает, является или нет стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места, которое меньше первого порогового значения стандартного отклонения узла места; осуществляет определение нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла места не меньше или равно второму пороговому значению стандартного отклонения угла места; вычисляет стандартное отклонение угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла азимута спутника, когда стандартное отклонение угла места меньше или равно второму пороговому значению стандартного отклонения угла места; осуществляет определение нахождения в помещении и не-рядом-с-окном, когда стандартное отклонение угла азимута меньше или равно пороговому значению стандартного отклонения угла азимута, которое является предварительно установленным; и осуществляет определение нахождения в помещении и рядом-с-окном, когда стандартное отклонение угла азимута не меньше или равно пороговому значению стандартного отклонения угла азимута.
[0205] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет комбинированное стандартное отклонение угла места и угла азимута для спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; осуществляет определение для местоположений в помещении, когда комбинированное стандартное отклонение меньше или равно пороговому значению комбинированного стандартного отклонения, которое является предварительно установленным; и осуществляет определение нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно пороговому значению комбинированного стандартного отклонения.
[0206] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет комбинированное стандартное отклонение угла места и угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; осуществляет определение нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения, которое является предварительно установленным; оценивает, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; осуществляет определение нахождения в помещении и не-рядом-с-окном, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; и осуществляет определение нахождения в помещении и рядом-с-окном, когда комбинированное стандартное отклонение не меньше или равно второму пороговому значению комбинированного стандартного отклонения.
[0207] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет 3D зоны азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; осуществляет определение для местоположений в помещении, когда 3D зона азимута меньше или равна пороговому значению 3D зоны азимута, которое является предварительно установленным; и осуществляет определение нахождения вне помещения, когда 3D зона азимута не меньше или равна пороговому значению 3D зоны азимута.
[0208] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет степень смещения спутника, передающего принимаемую радиоволну, к предварительно определенному углу места и особому направлению, на основе информации угла места спутника и информации угла азимута спутника; осуществляет определение для местоположений в помещении, когда степень смещения меньше или равна пороговому значению степени смещения, которое является предварительно установленным; и осуществляет определение нахождения вне помещения, когда степень смещения не меньше или равна пороговому значению степени смещения.
[0209] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет комбинированное стандартное отклонение угла места и угла азимута спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; устанавливает первое пороговое значение стандартного отклонения и второе пороговое значения стандартного отклонения, которое меньше первого порогового значения стандартного отклонения, на основе информации высоты над землей непосредственно или опосредованно полученной от средства извлечения высоты над землей, предусмотренного в мобильном терминале; осуществляет определение нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения; оценивает, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; осуществляет определение нахождения в помещении и не-рядом-с-окном, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; и осуществляет определение нахождения в помещении и рядом-с-окном, когда комбинированное стандартное отклонение не меньше или равно второму пороговому значению комбинированного стандартного отклонения.
[0210] Блок определения классификации среды в помещении/вне помещения, в соответствии с шестым аспектом, вычисляет комбинированное стандартное отклонение угла места и угла азимута у спутника, передающего принимаемую радиоволну, на основе информации угла места спутника и информации угла азимута спутника; устанавливает первое пороговое значение стандартного отклонения и второе пороговое значение стандартного отклонения, которое меньше первого порогового значения стандартного отклонения, на основе информации высоты над землей непосредственно или опосредованно полученной от средства извлечения высоты над землей, предусмотренного в мобильном терминале; осуществляет определение нахождения вне помещения, когда комбинированное стандартное отклонение не меньше или равно первому пороговому значению комбинированного стандартного отклонения; оценивает, является или нет комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения, которое меньше первого порогового значения комбинированного стандартного отклонения, когда комбинированное стандартное отклонение меньше или равно первому пороговому значению комбинированного стандартного отклонения; оценивает, является или нет информация скорости движения непосредственно или опосредованно полученная от средства извлечения скорости движения, предусмотренного в мобильном терминале, больше или равна первому пороговому значению скорости движения, которое является предварительно установленным, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; осуществляет определение внутри-метро, когда информация скорости движения больше или равна первому пороговому значению скорости движения; осуществляет определение нахождения в помещении и не-рядом-с-окном, когда информация скорости движения не больше или равна первому пороговому значению скорости движения; оценивает, является или нет информация скорости движения непосредственно или опосредованно полученная от средства извлечения скорости движения больше или равна второму пороговому значению скорости движения, которое является предварительно установленным, когда комбинированное стандартное отклонение меньше или равно второму пороговому значению комбинированного стандартного отклонения; осуществляет определение внутри-наземного-транспортного-средства, когда информация скорости движения больше или равна второму пороговому значению скорости движения; и осуществляет определение нахождения в помещении и рядом-с-окном, когда информация скорости движения не больше или равна второму пороговому значению скорости движения.
[0211] Кроме того, раскрытие вышеупомянутых PTL включено в настоящее описание посредством ссылки. Примерные варианты осуществления и примеры могут быть изменены и отрегулированы в рамках объема всего раскрытия (включая формулу изобретения и чертежи) настоящего изобретения, и на основе его базовой технологической концепции. Кроме того, в рамках объема всего раскрытия настоящего изобретения, разнообразные раскрытые элементы (включая соответствующие элементы формулы изобретения, соответствующие элементы примерных вариантов осуществления и примеров, и соответствующие элементы чертежей) могут быть объединены и выбраны (или не выбраны при необходимости) разнообразными путями. Т.е. очевидно, что настоящее изобретение включает в себя разнообразные модификации и изменения, которые могут быть выполнены специалистом в соответствующей области техники, на основе всего раскрытия, включающего в себя формулу изобретения и чертежи, и технологическую идею. Кроме того, касательно числовых значений и числовых диапазонов, описанных в данном документе, любые промежуточные значения, более низкие числовые значения, и небольшие диапазоны следует толковать как описываемые, даже когда отсутствует их явное описание.
[0212] В то время, как изобретение было в частности показано и описано со ссылкой на его примерные варианты осуществления, изобретение не ограничивается этими вариантами осуществления. Специалистам в соответствующей области техники следует понимать, что разнообразные изменения по форме и в подробностях могут быть выполнены здесь, не отступая от сущности и объема настоящего изобретения, как определено формулой изобретения.
[0213] Данная заявка основана на и по ней испрашивается приоритет Японской патентной заявки № 2016-069713, поданной 30 марта 2016г., раскрытие которой во всей совей полноте включено в настоящее описание посредством ссылки.
[Перечень ссылочных обозначений]
[0214] 1 Мобильный терминал
2 Антенна GPS
3 Приемник GPS (спутниковый приемник)
4 Блок определения классификации среды в помещении/вне помещения
5 Блок передачи данных
6 Сеть
7 Сервер данных
8 Блок визуализации классификации среды в помещении/вне помещения
9 Блок извлечения высоты над землей
10 Блок извлечения скорости движения
11 Датчик
12 Источник информации
21 Блок определения классификации среды в помещении/вне помещения
30 Спутниковый приемник
31 Блок определения классификации среды в помещении/вне помещения
100 Система определения нахождения в помещении/вне помещения.
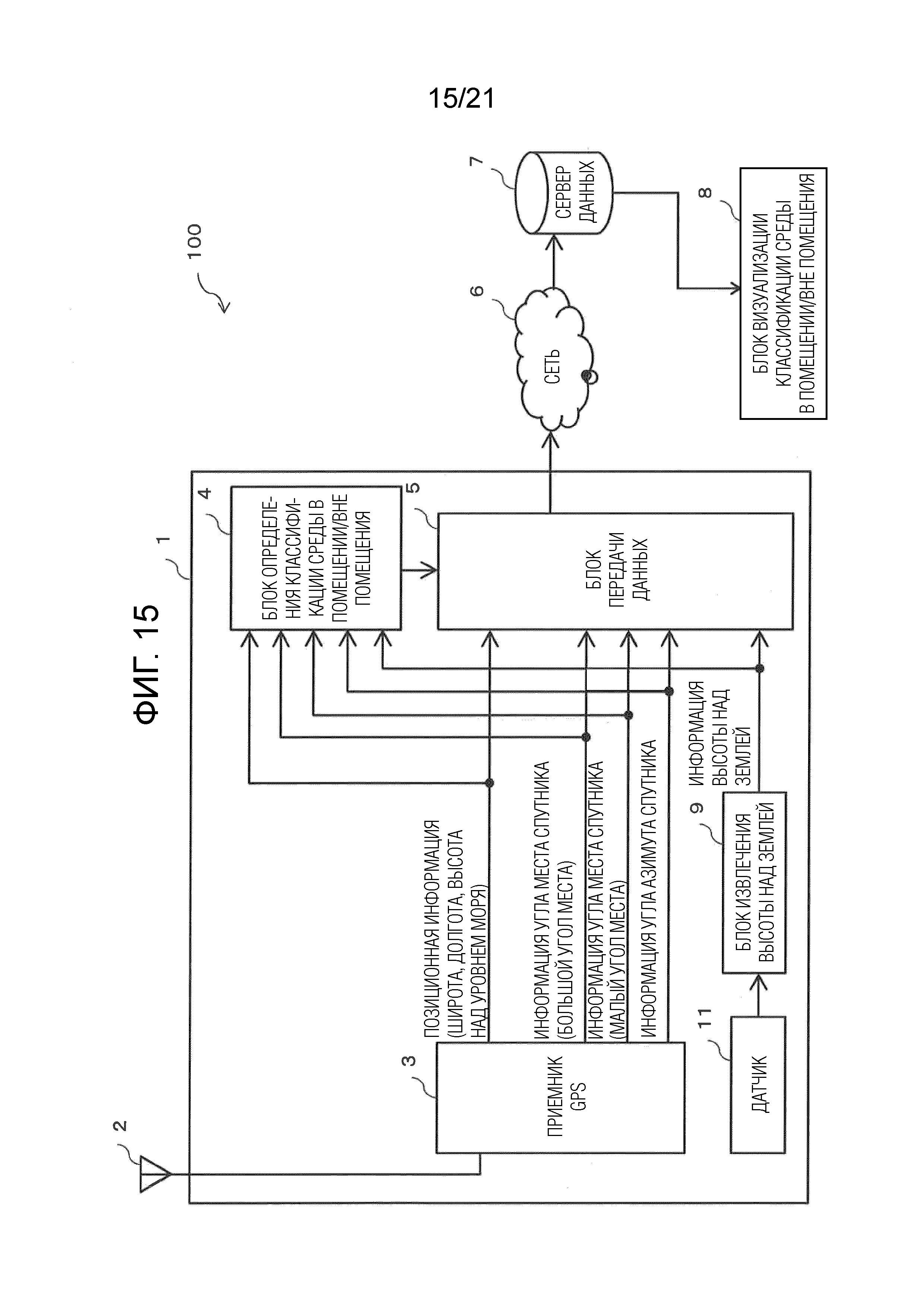
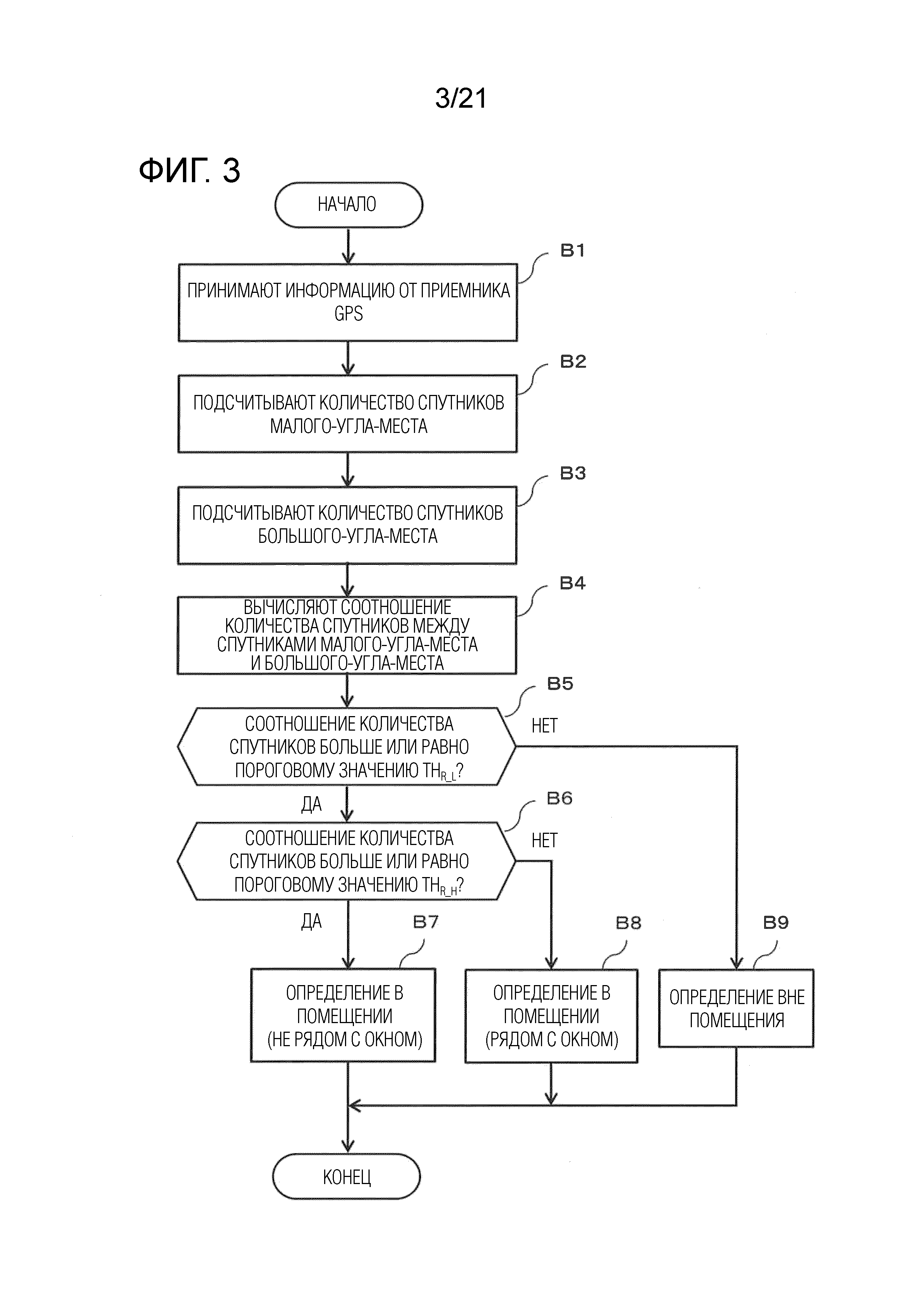
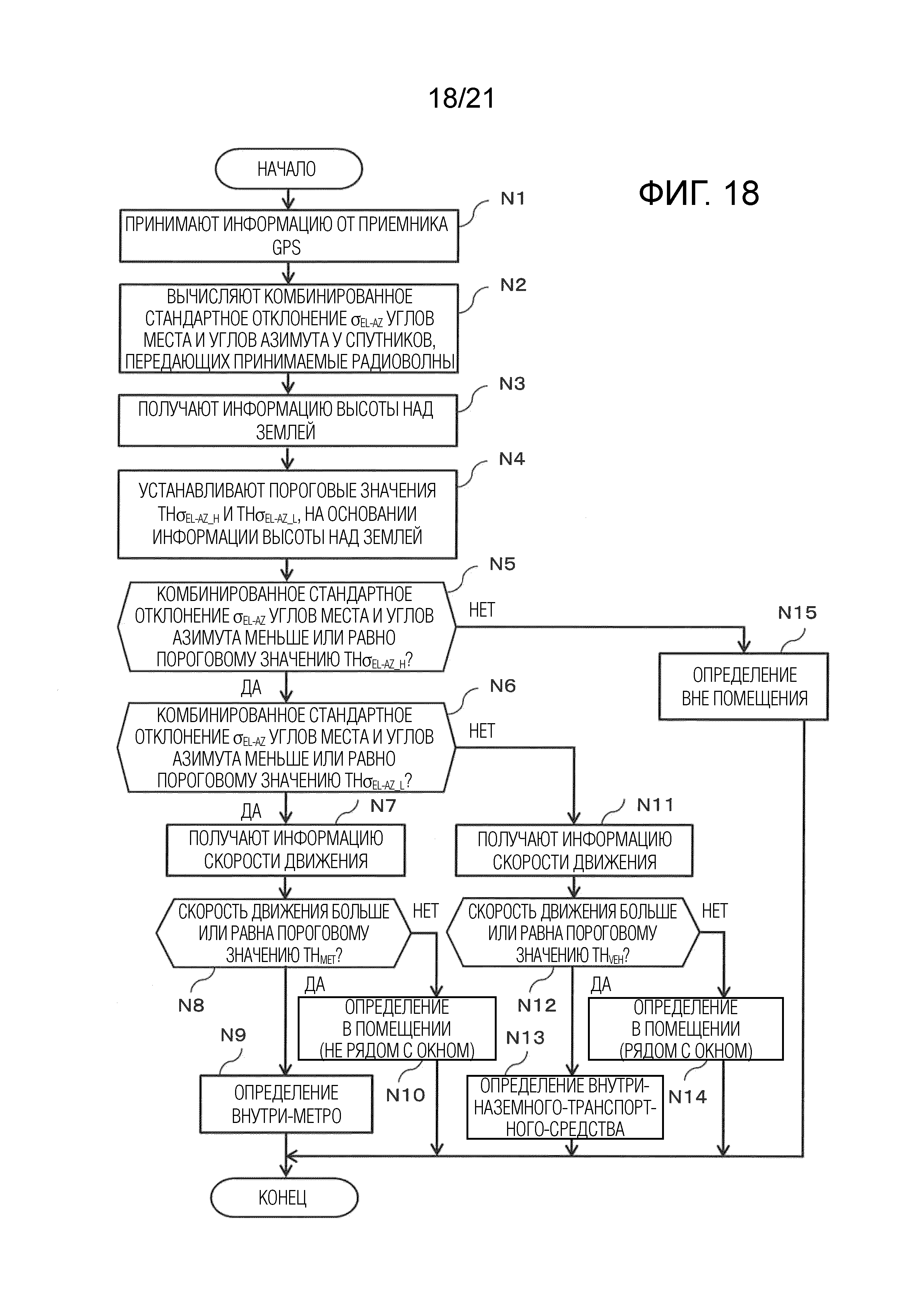
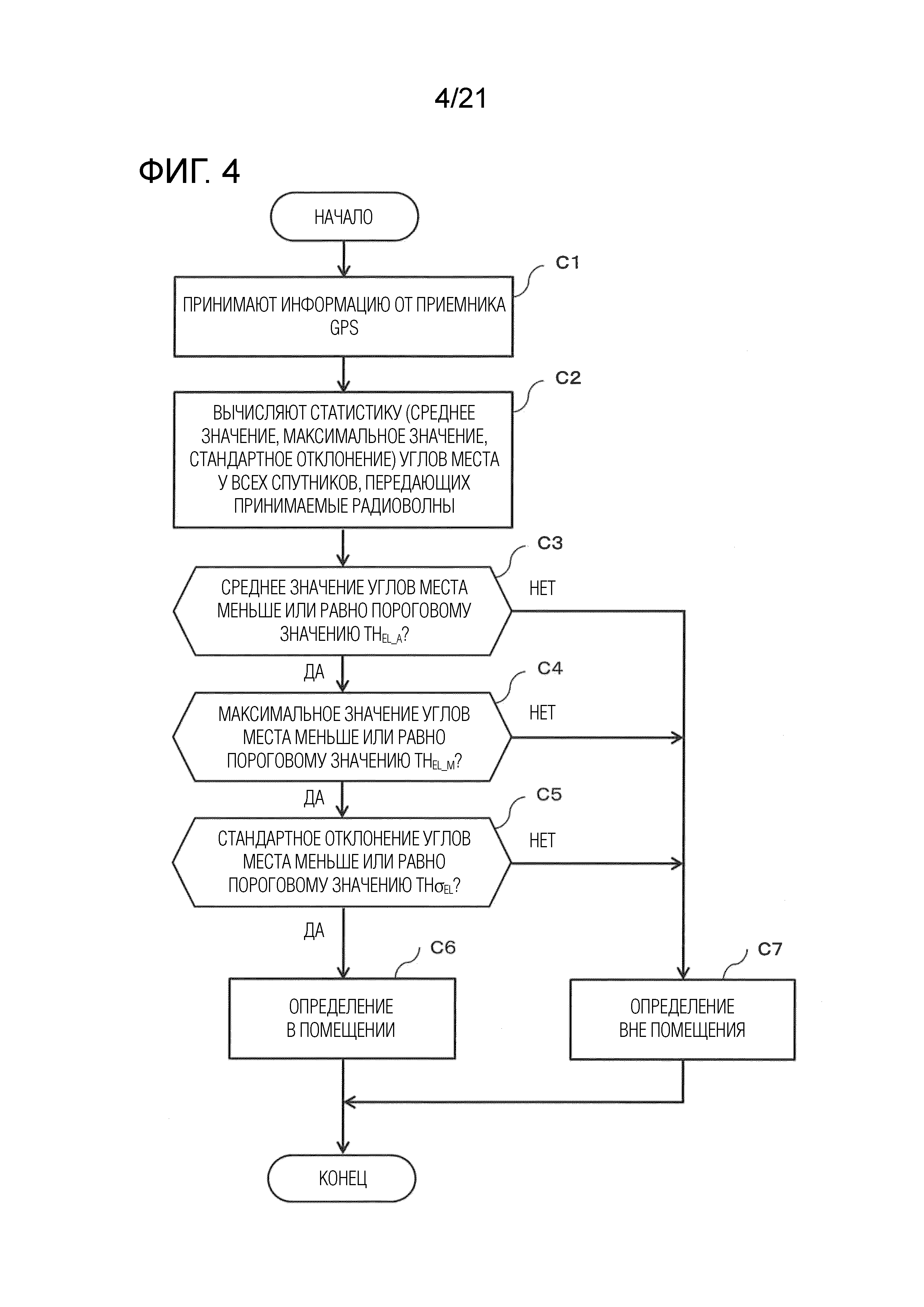
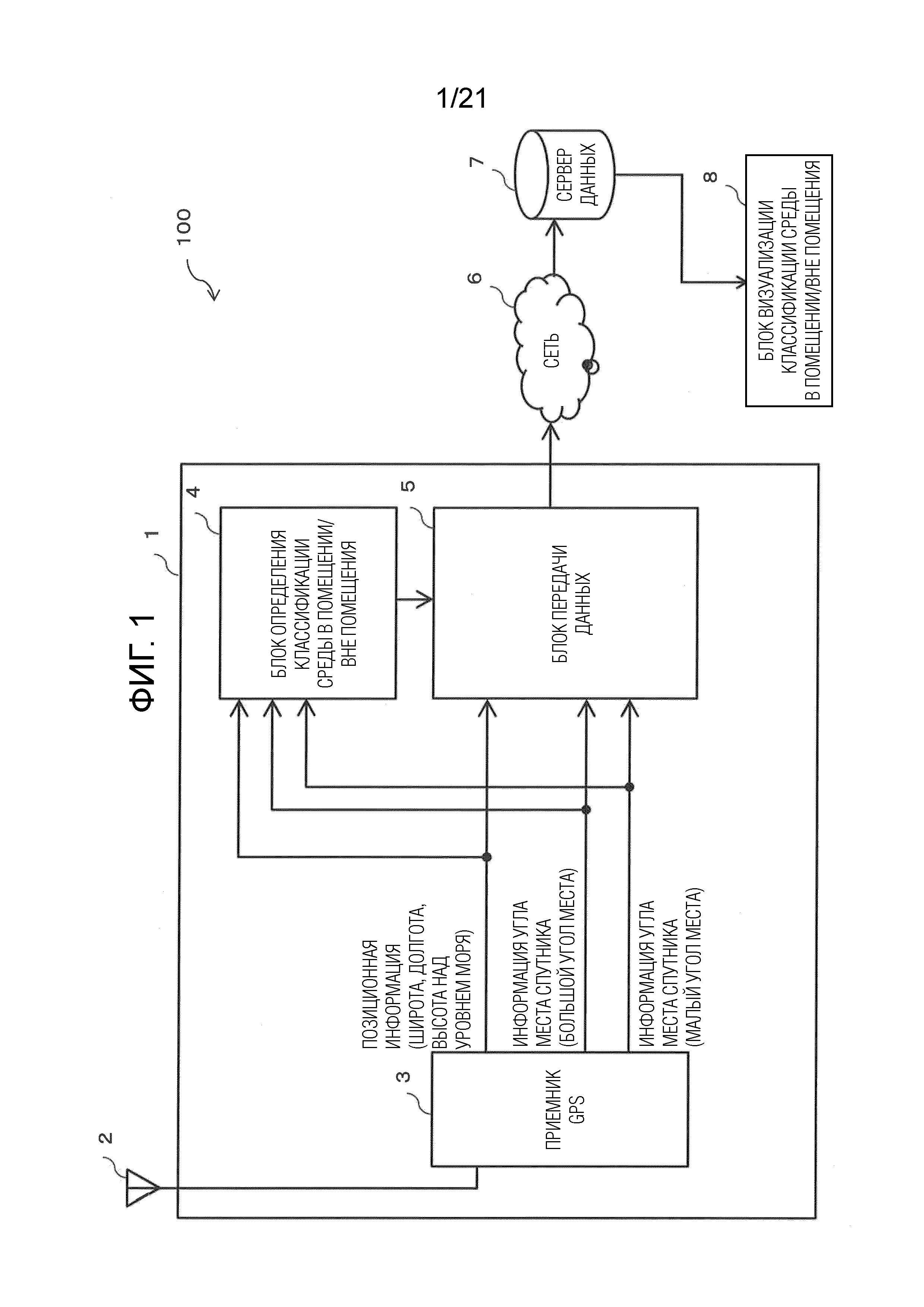
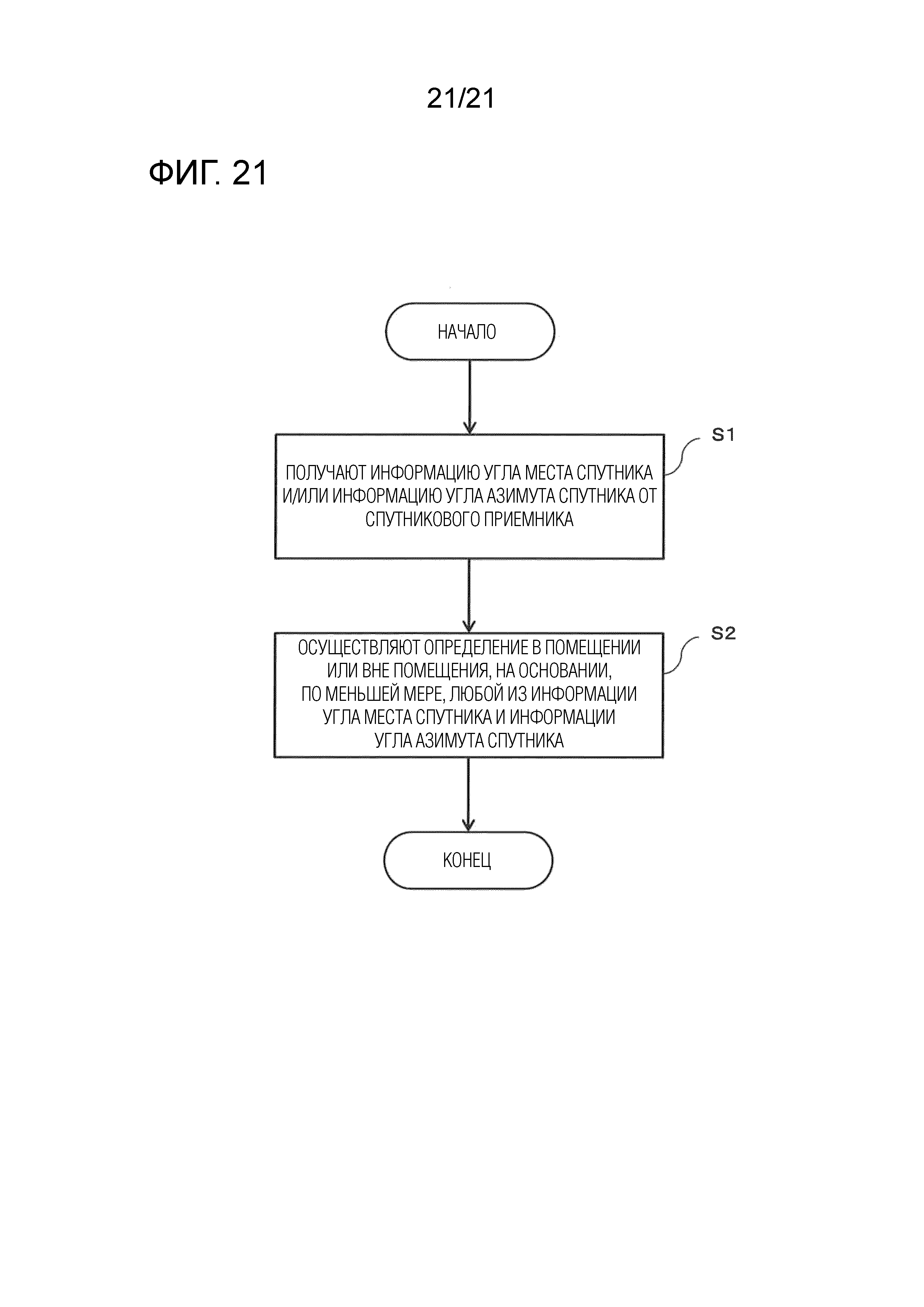
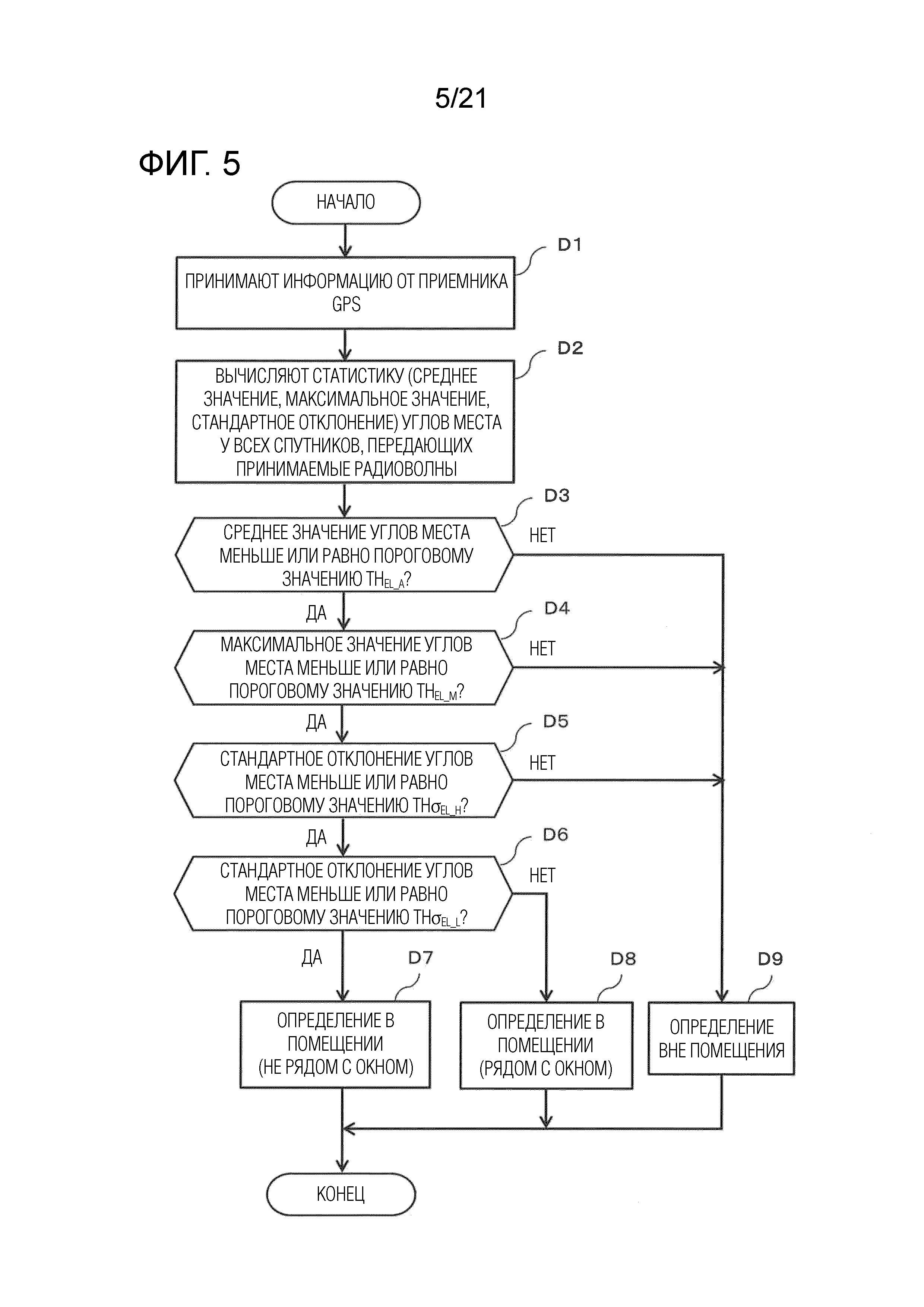
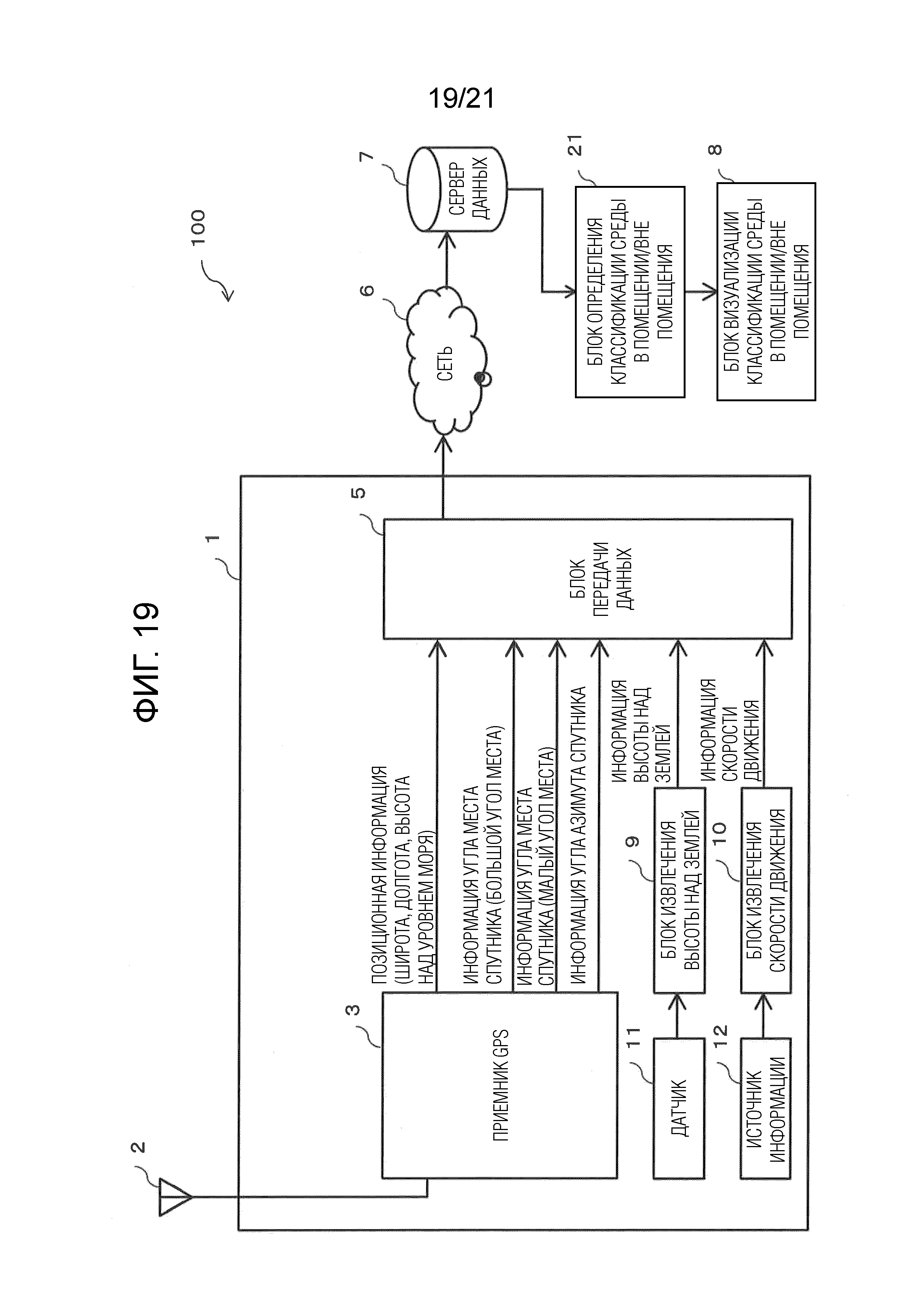
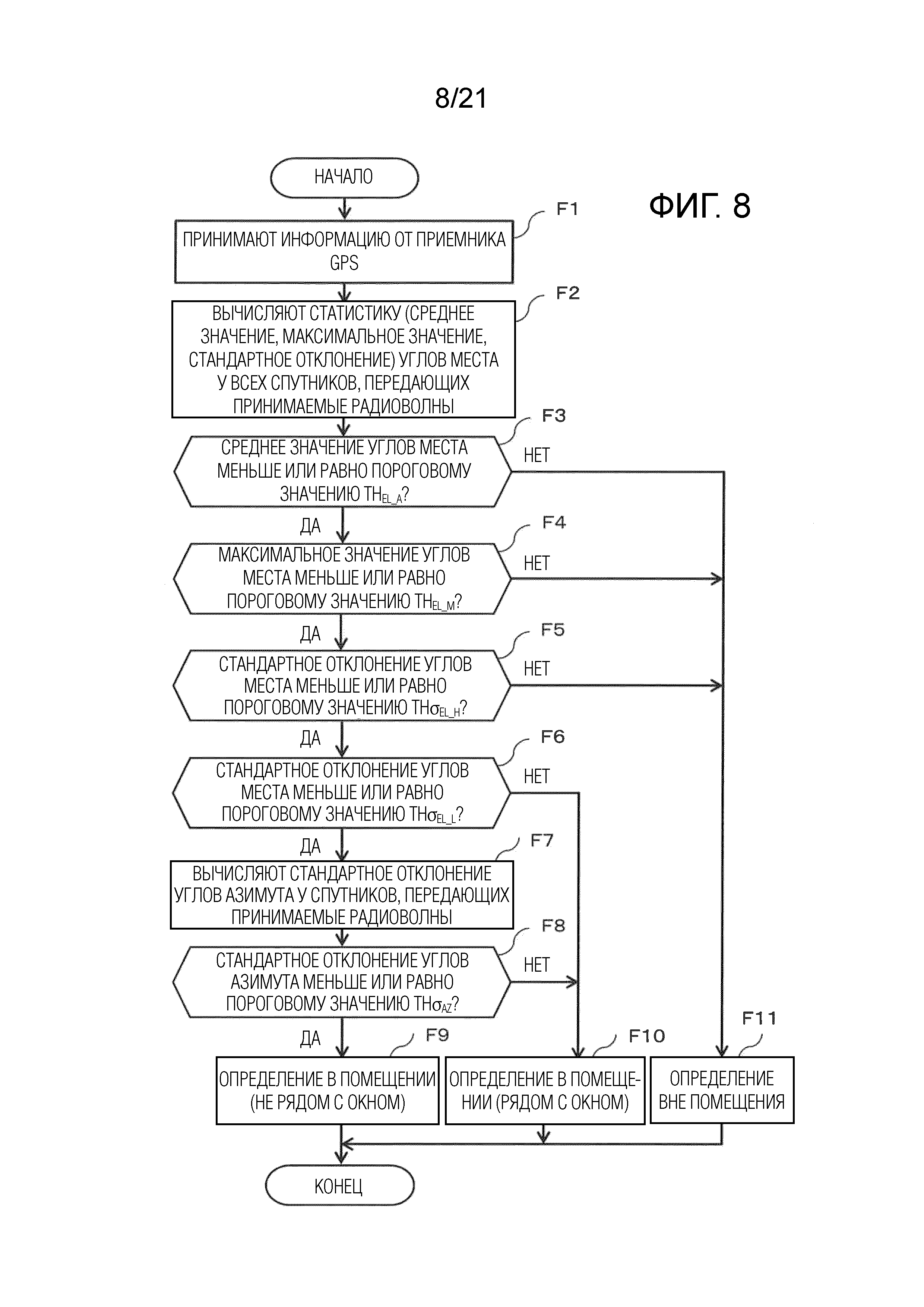
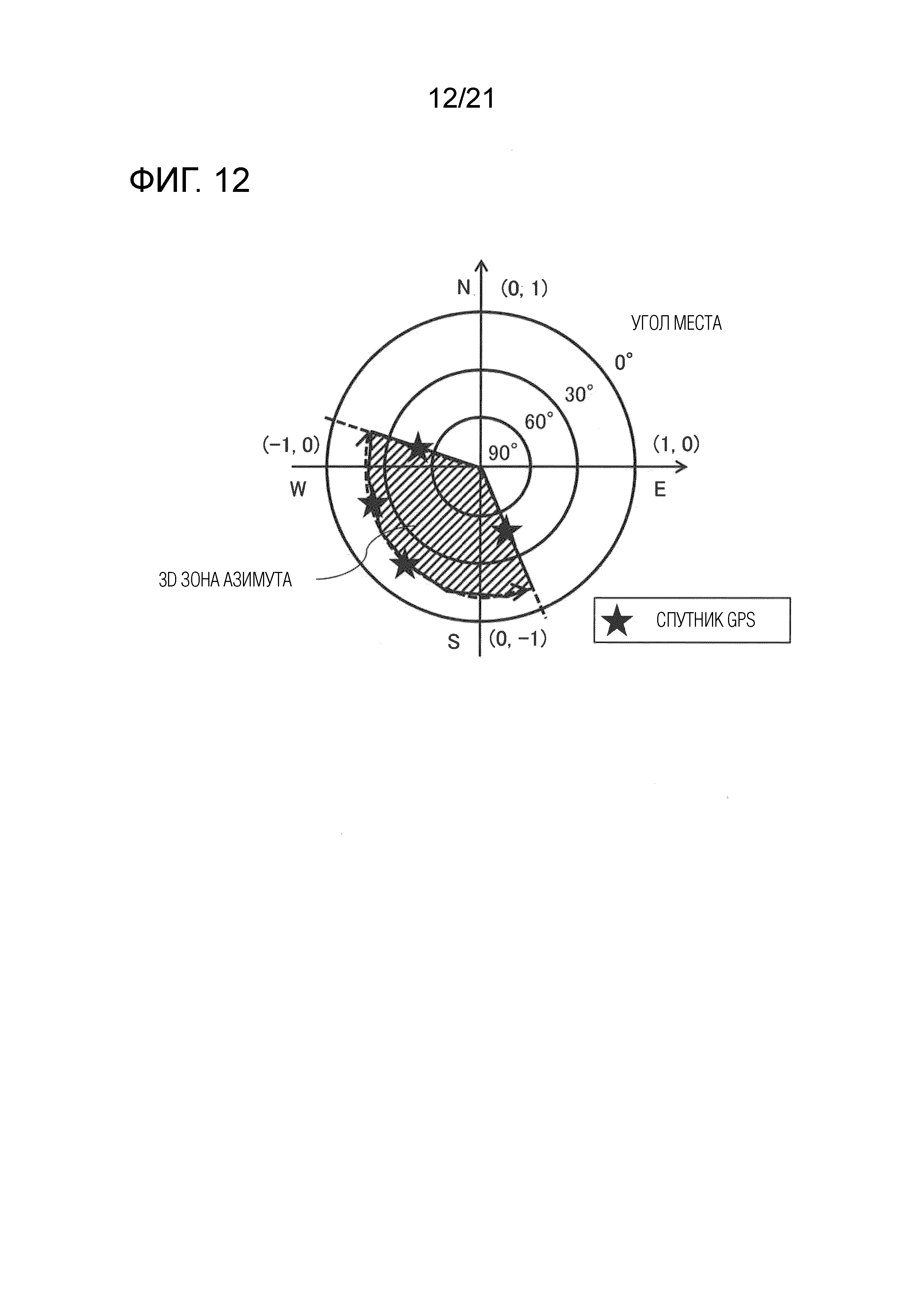
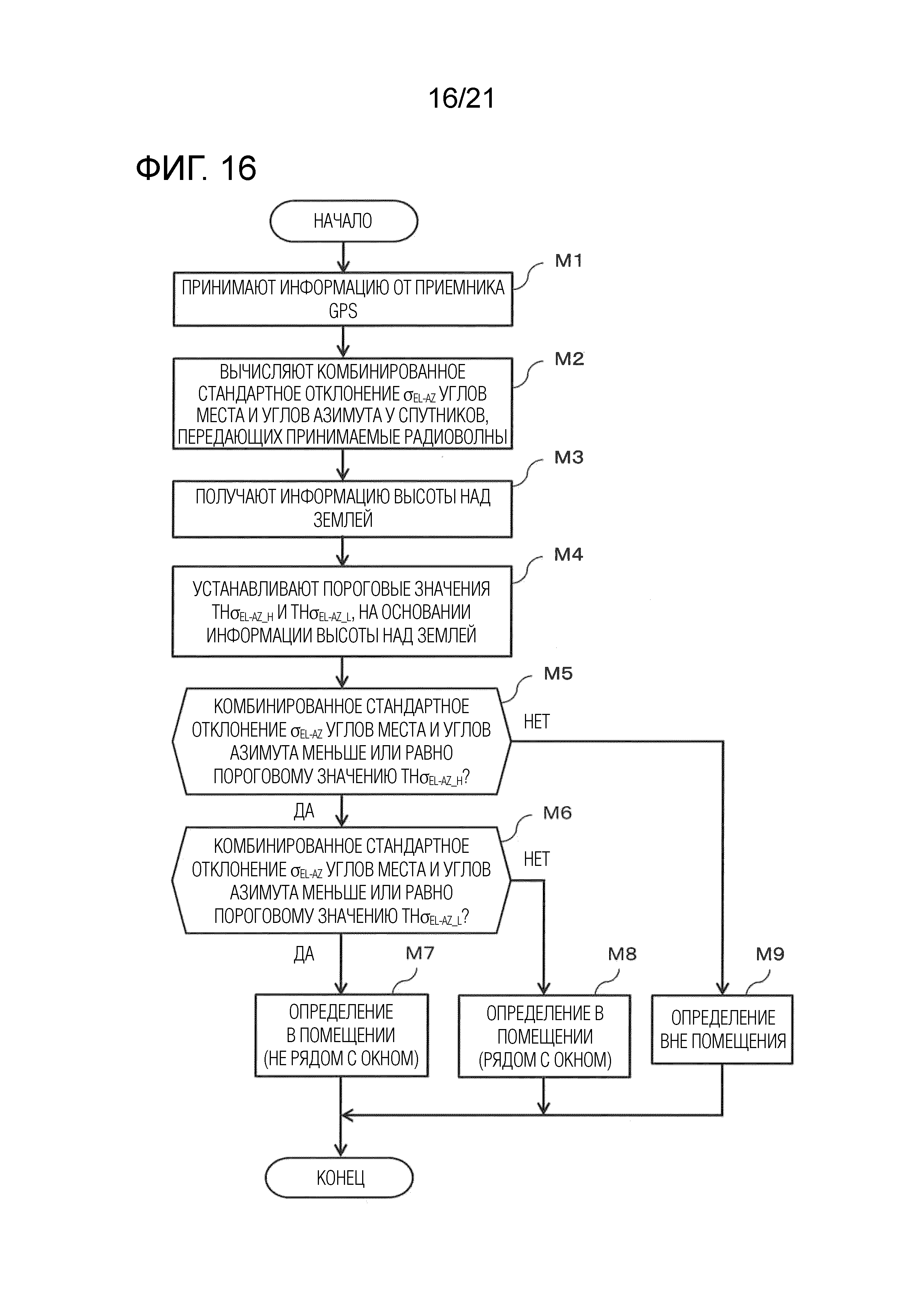
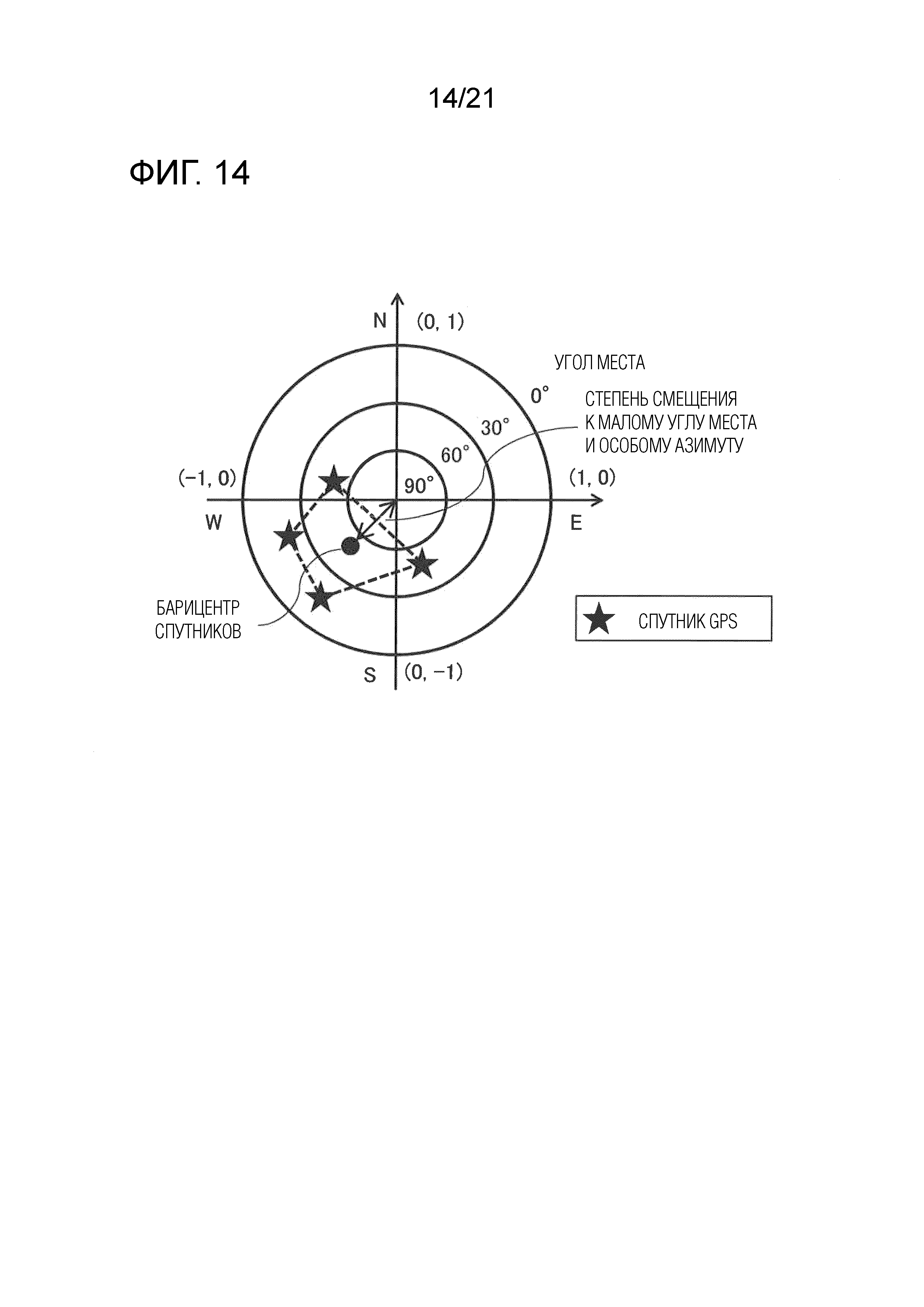
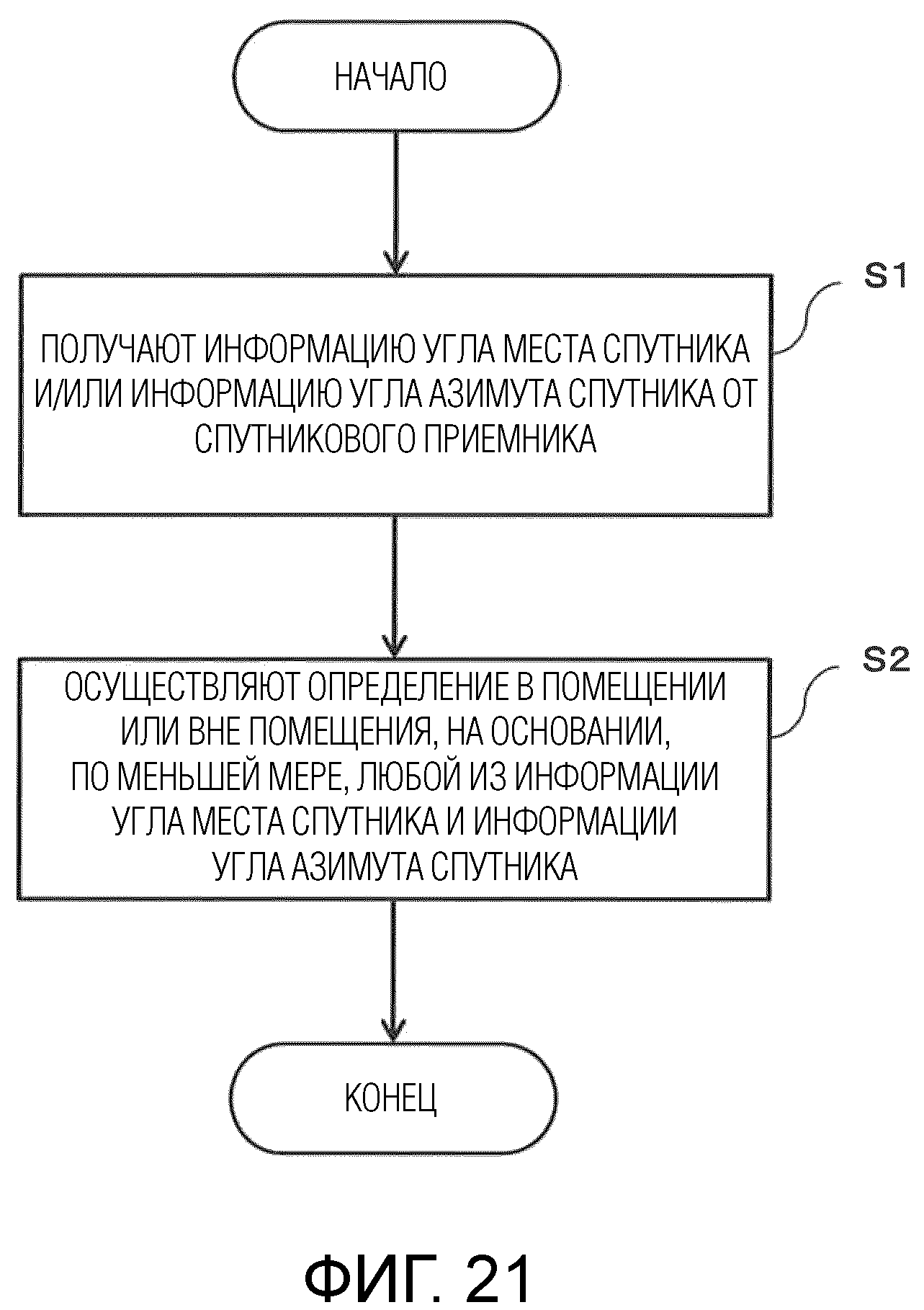
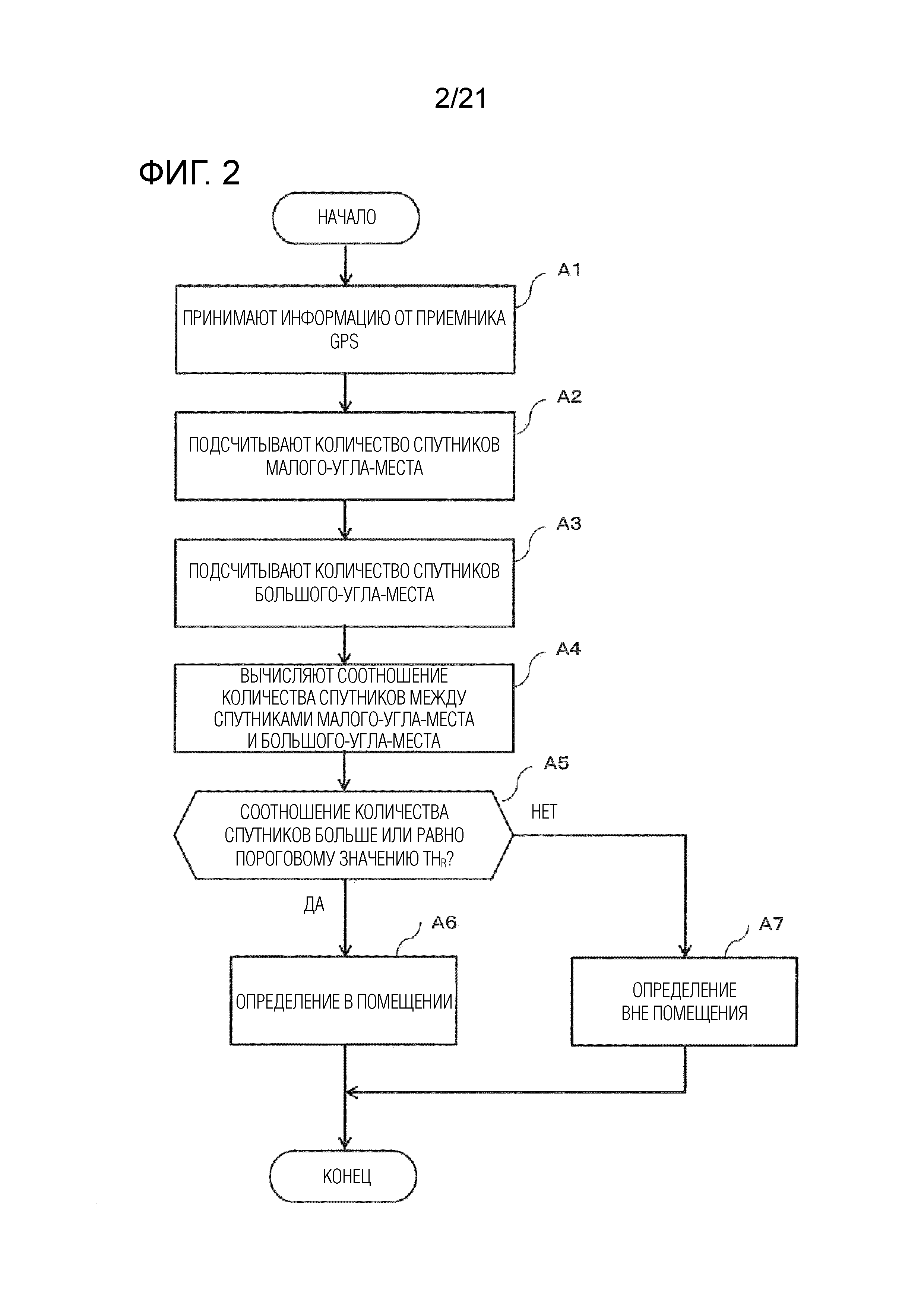
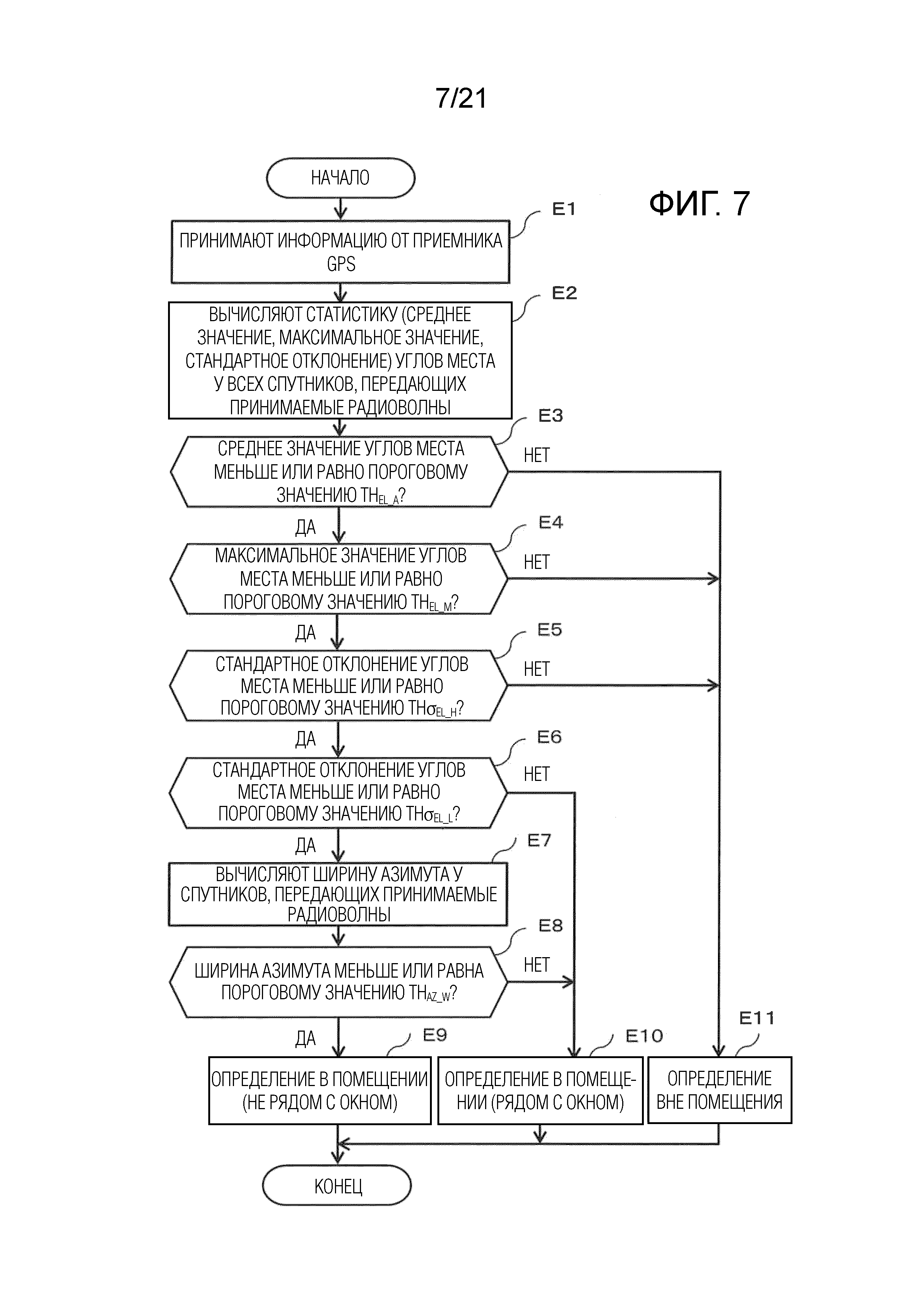
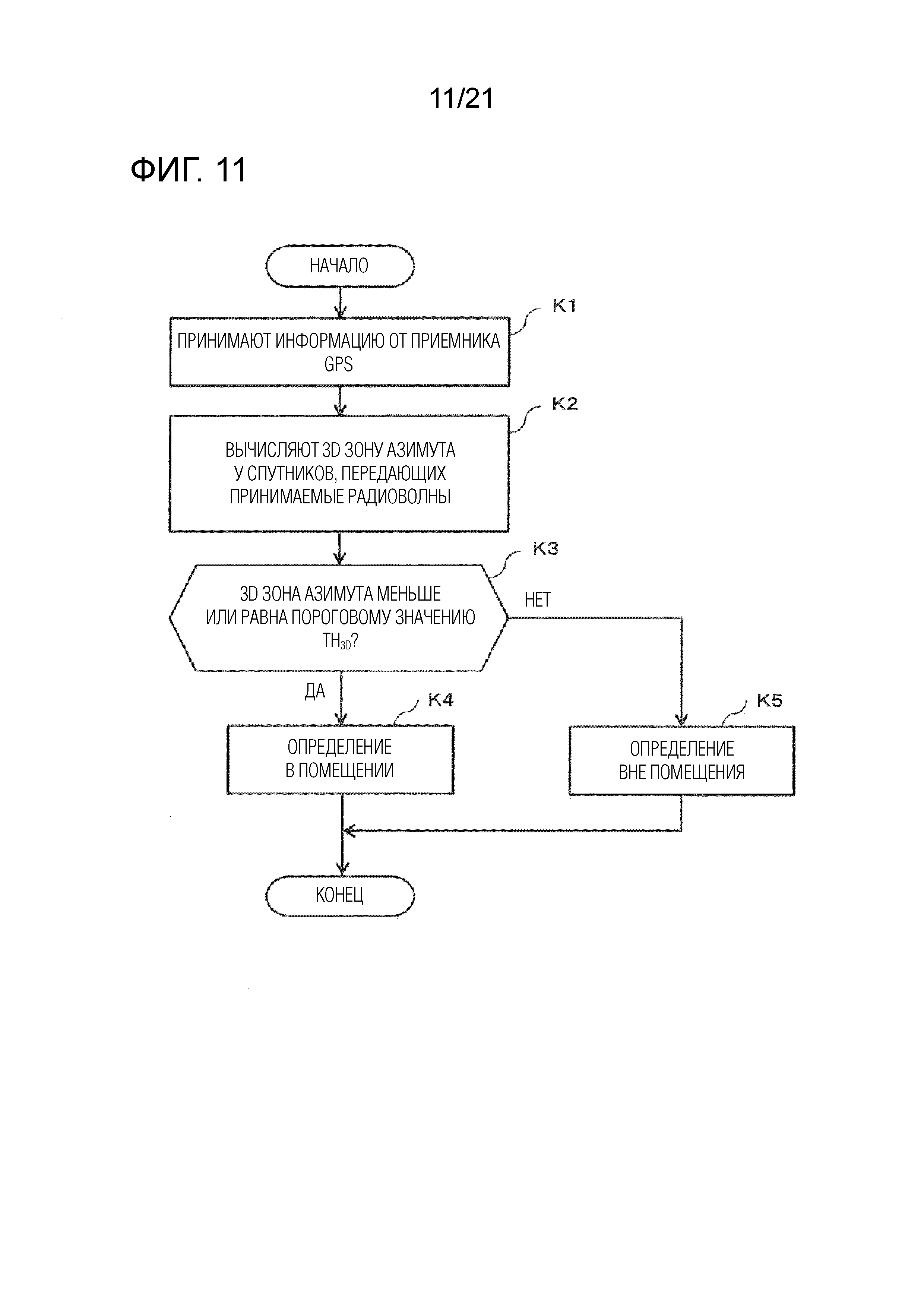
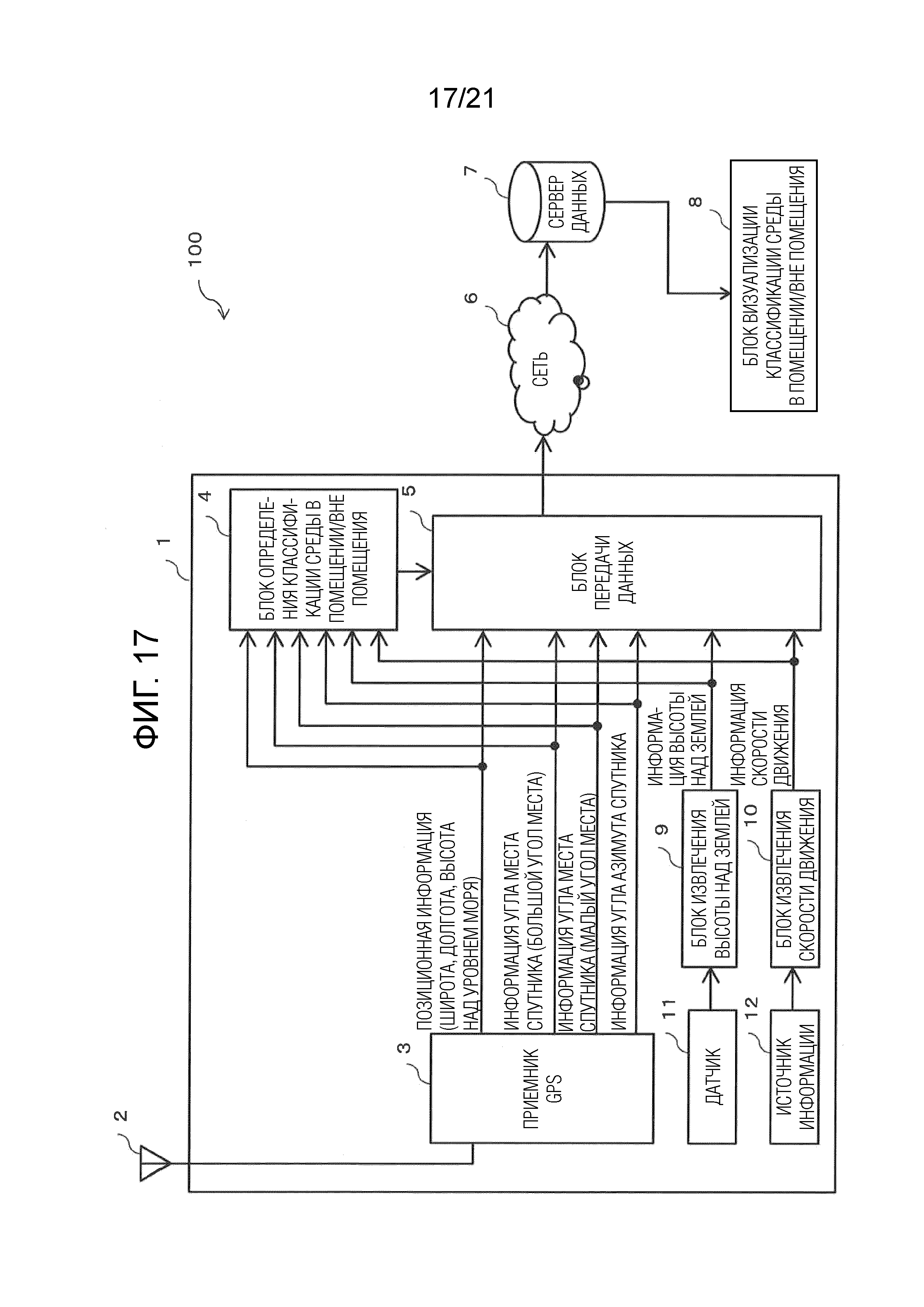
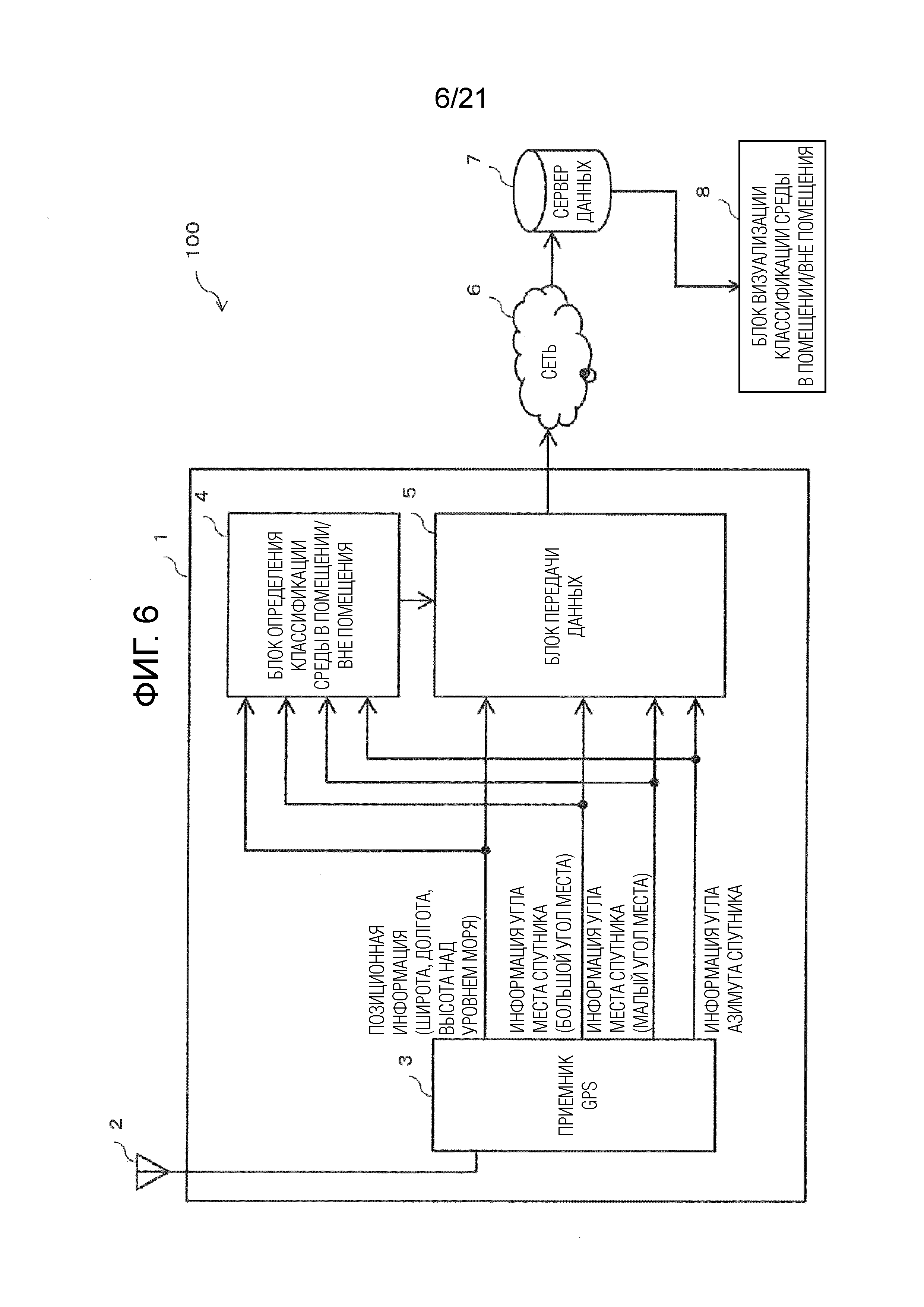
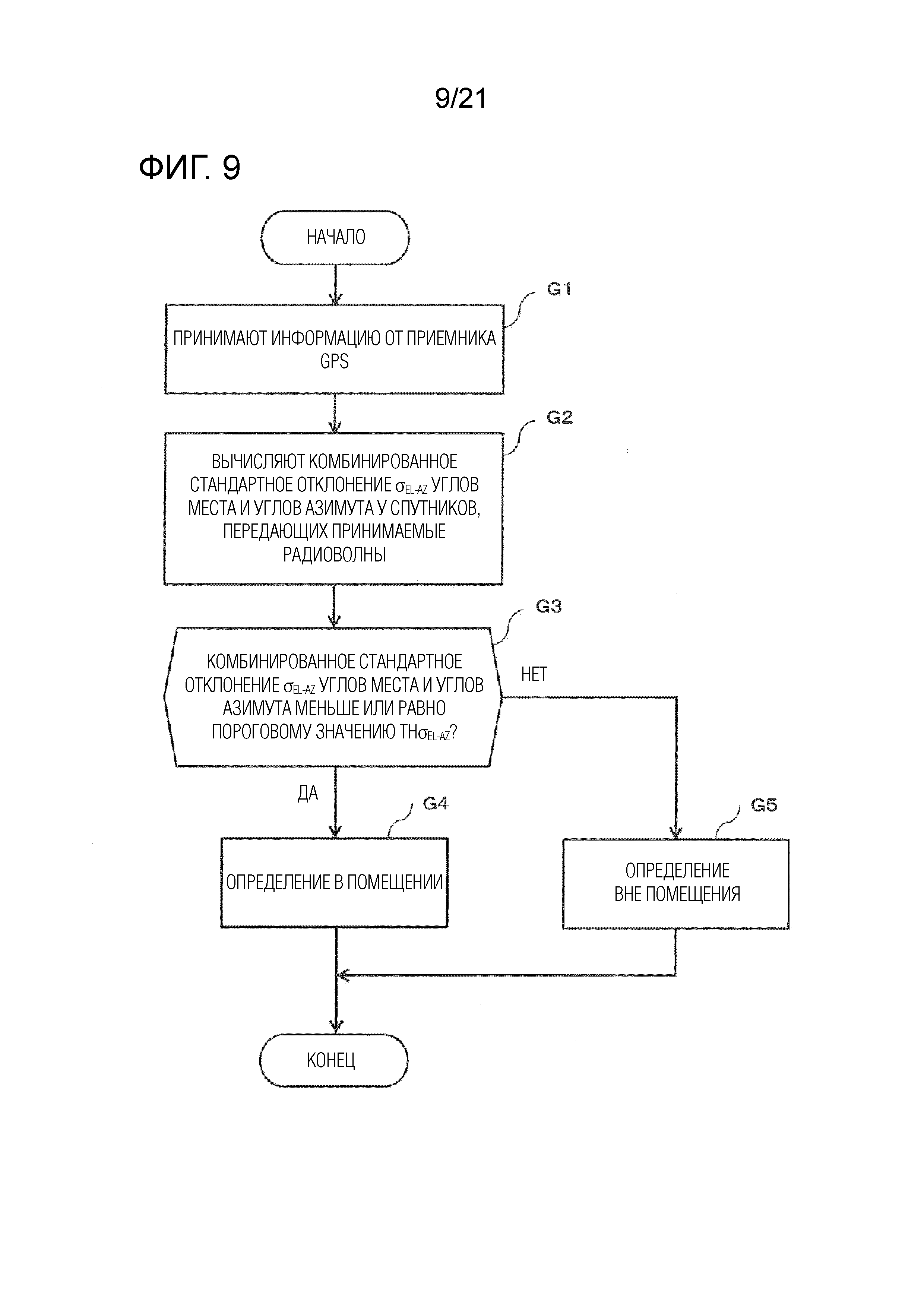
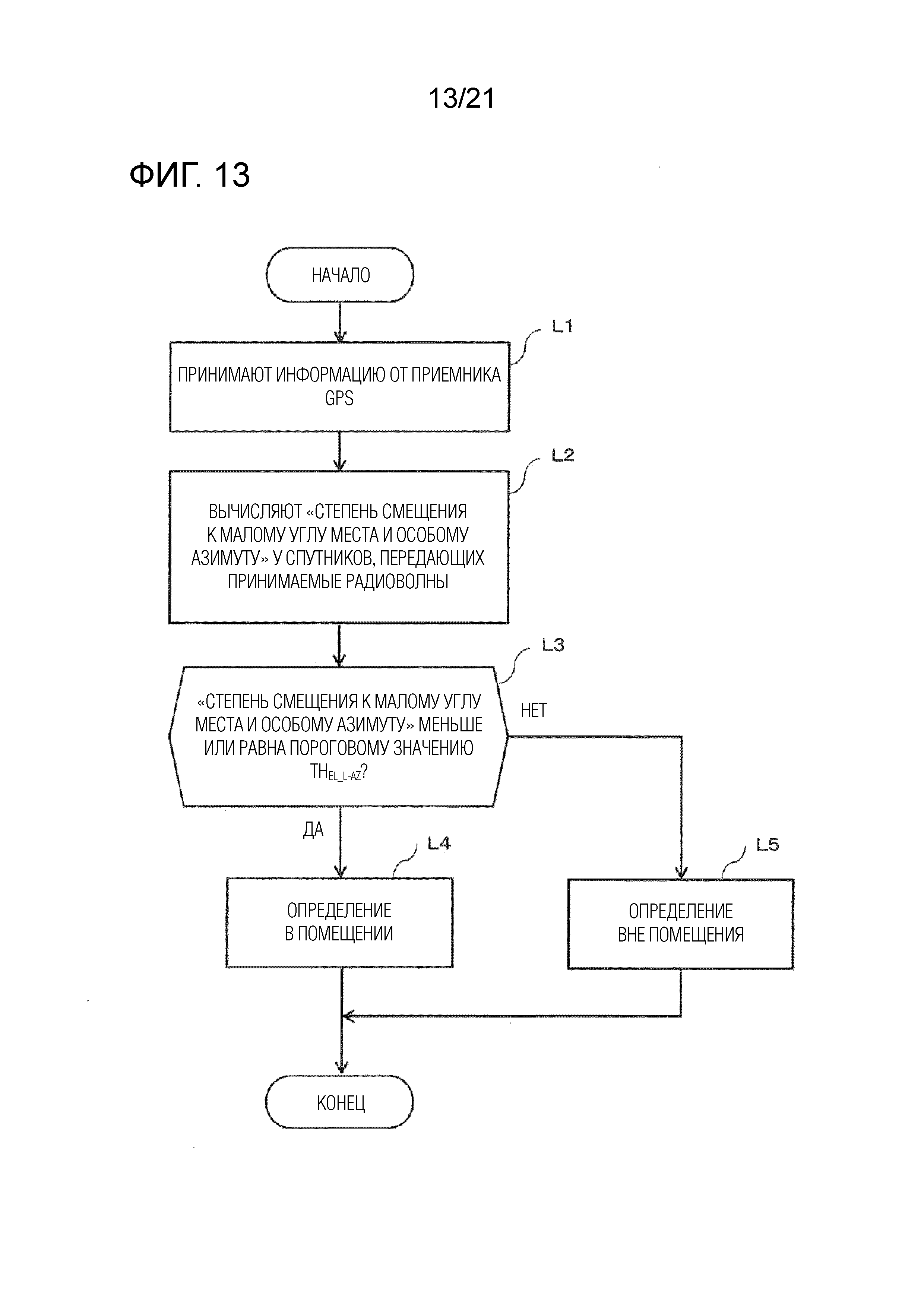
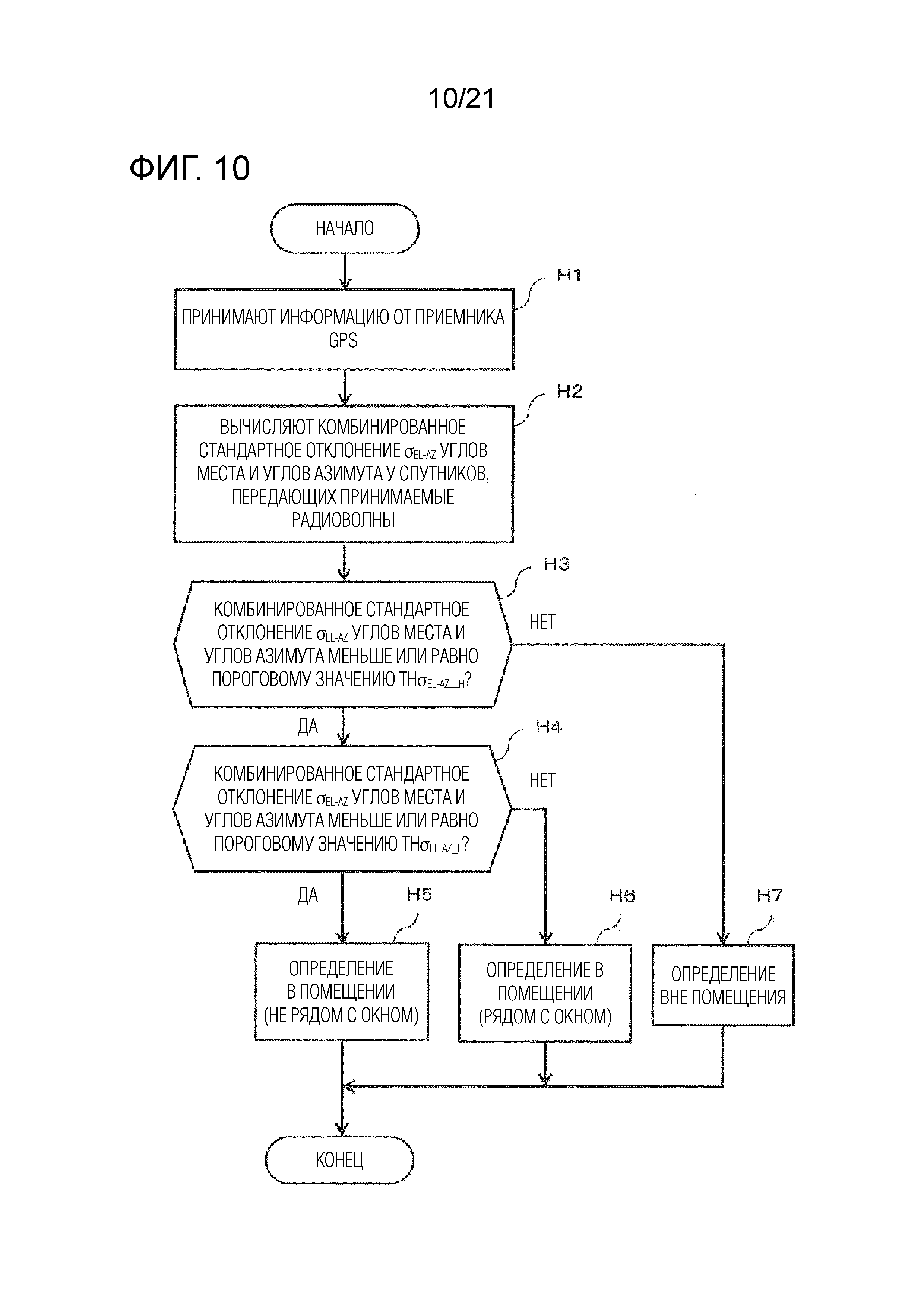
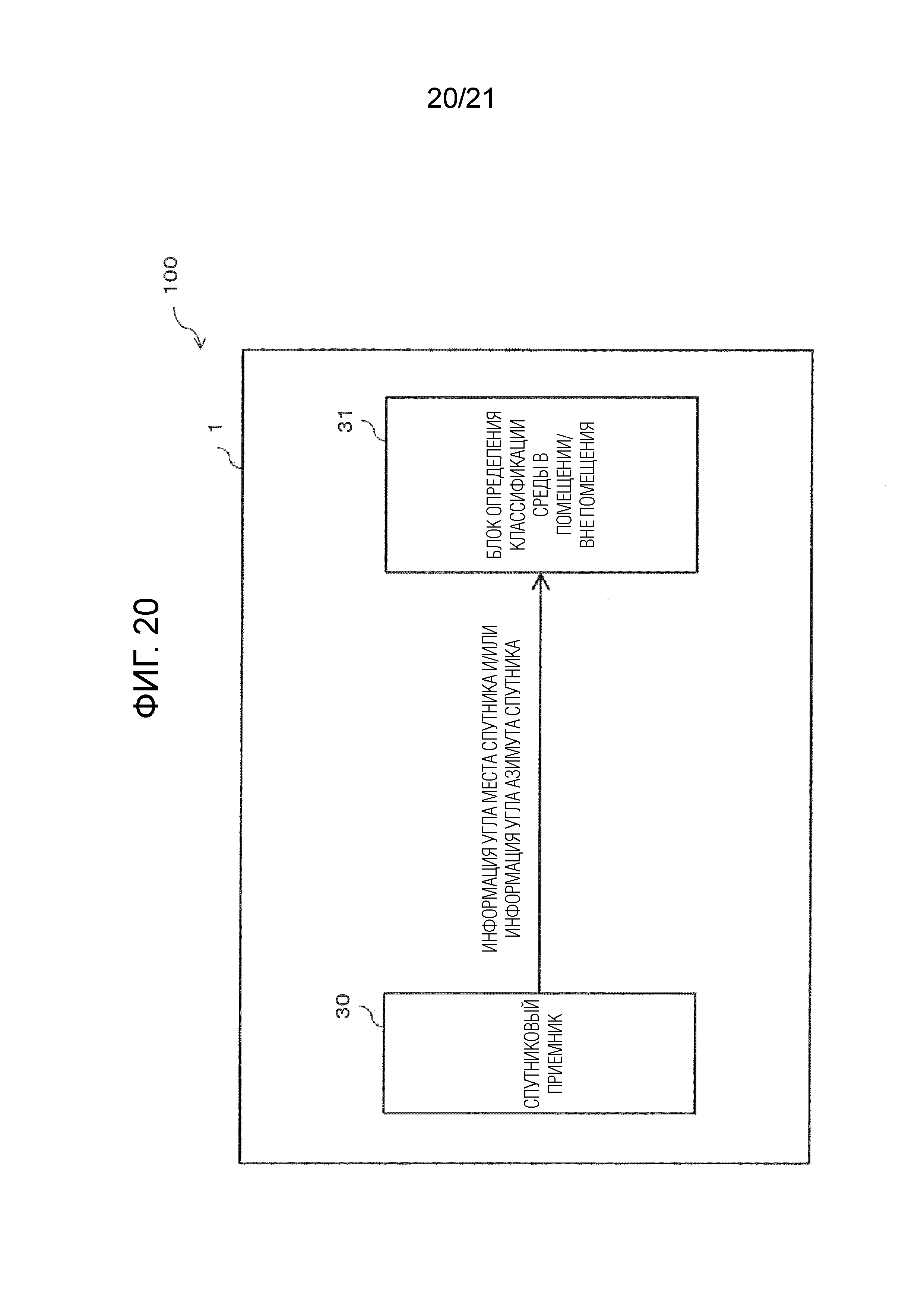
Устройство оптической передачи и способ оптической передачи
Способ передачи обслуживания между базовыми станциями, система радиосвязи, способ управления drx, базовая станция и терминал связи
Устройство передачи, система передачи, способ передачи и программа для передачи
Передающее устройство радиосвязи и способ радиопередачи
Способ облегчения передачи обслуживания устройства мобильной связи
Схема подавления дрожания и способ подавления дрожания
Система и устройство микроволновой связи и способ соединения в системе
Устройство передачи данных
Способ и устройство беспроводной передачи данных
Система мобильной связи и способ управления связью

