Результат интеллектуальной деятельности: ИЗБЕГАНИЕ УДАРА В ДНИЩЕ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
Даже на низких скоростях, повреждение передней облицовки или низа кузова транспортного средства может вызываться, когда водитель заезжает слишком далеко вперед на место стоянки с высоким бордюрным камнем, переезжает через лежачий полицейский, встречается с выбоиной или другим препятствием на проезжей части дороги, и т.д. Соответственно, механизм для избегания ударов, которые могут вызывать повреждение у днища кузова транспортного средства, был бы полезен.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящей заявке предлагается система для установки в транспортном средстве, содержащая камеру, выполненную с возможностью устанавливаться обращенной веред от транспортного средства; и компьютер, который включает в себя процессор и память, и который запрограммирован принимать первое и второе изображения с камеры; определять высоту препятствия, расположенного спереди транспортного средства, с использованием по меньшей мере первого и второго изображений; и на основании, по меньшей мере частично, высоты препятствия, отправлять команду через шину связи, в контроллер компонента для управления скоростью транспортного средства. Причем команда в контроллер компонента является командой для снижения скорости транспортного средства. Причем контроллер компонента является одним из контроллера тормозов и контроллера двигателя. Причем компьютер дополнительно запрограммирован формировать карту структуры поверхности, регистрирующую высоты множества точек в зоне обзора камеры, при этом, высота препятствия включена в карту структуры поверхности. Причем высота препятствия определяется согласно высшей точке на карте структуры поверхности. Причем компьютер дополнительно запрограммирован отправлять команду по меньшей мере частично на основании крутизны препятствия. Причем компьютер запрограммирован определять высоту препятствия, когда транспортное средство движется на скорости ниже предопределенного порогового значения. Причем компьютер запрограммирован определять высоту препятствия по меньшей мере частично посредством определения первого и второго расстояний транспортного средства от препятствия на первом и втором изображения, соответственно, и использования сравнения изображений и расстояний для определения высоты препятствия. Система дополнительно содержит по меньшей мере один датчик без камеры, при этом, компьютер дополнительно запрограммирован использовать данные с датчика без камеры в дополнение к первому и второму изображениям при определении высоты препятствия. Система дополнительно содержит по меньшей мере одну вторую камеру, при этом, компьютер дополнительно запрограммирован принимать по меньшей мере одно третье изображение с по меньшей мере одной второй камеры, и использовать третье изображение при определении высоты препятствия.
Также предлагается способ, состоящий в том, что принимают первое и второе изображения с камеры, установленной в транспортном средстве; определяют высоту препятствия, расположенного спереди транспортного средства, с использованием по меньшей мере первого и второго изображений; и на основании, по меньшей мере частично, высоты препятствия, отправляют команду через шину связи, в контроллер компонента для управления скоростью транспортного средства. Причем команда в контроллер компонента является командой для снижения скорости транспортного средства. Причем контроллер компонента является одним из контроллера тормозов и контроллера двигателя. Способ дополнительно состоит в том, что формируют карту структуры поверхности, регистрирующую высоты множества точек в зоне обзора камеры, при этом, высота препятствия включена в карту структуры поверхности. Причем высота препятствия определяется согласно высшей точке на карте структуры поверхности. Способ дополнительно состоит в том, что отправляют команду по меньшей мере частично на основании крутизны препятствия. Способ дополнительно состоит в том, что определяют высоту препятствия, когда транспортное средство движется на скорости ниже предопределенного порогового значения. Способ дополнительно состоит в том, что определяют высоту препятствия по меньшей мере частично посредством того, что определяют первое и второе расстояния транспортного средства от препятствия на первом и втором изображения, соответственно, и используют сравнение изображений и расстояний для определения высоты препятствия. Способ дополнительно состоит в том, что принимают данные с по меньшей мере одного датчика без камеры и используют данные с датчика без камеры в дополнение к первому и второму изображениям при определении высоты препятствия. Способ дополнительно состоит в том, что принимают по меньшей мере одно третье изображение с по меньшей мере одной второй камеры и используют третье изображение при определении высоты препятствия.
ЧЕРТЕЖИ
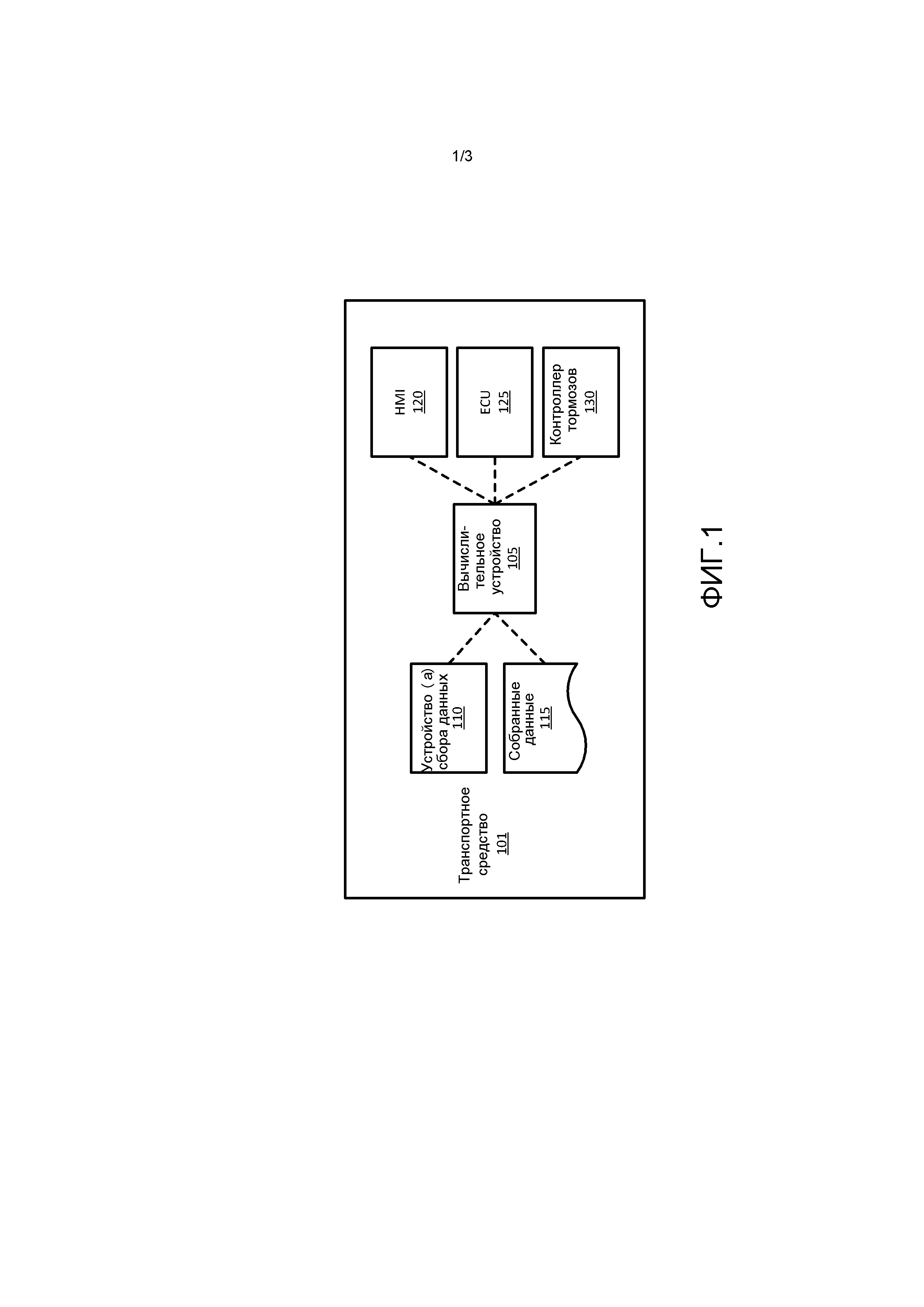
Фиг. 1 - структурная схема примерного транспортного средства, оборудованного для избегания ударов в днище кузова.
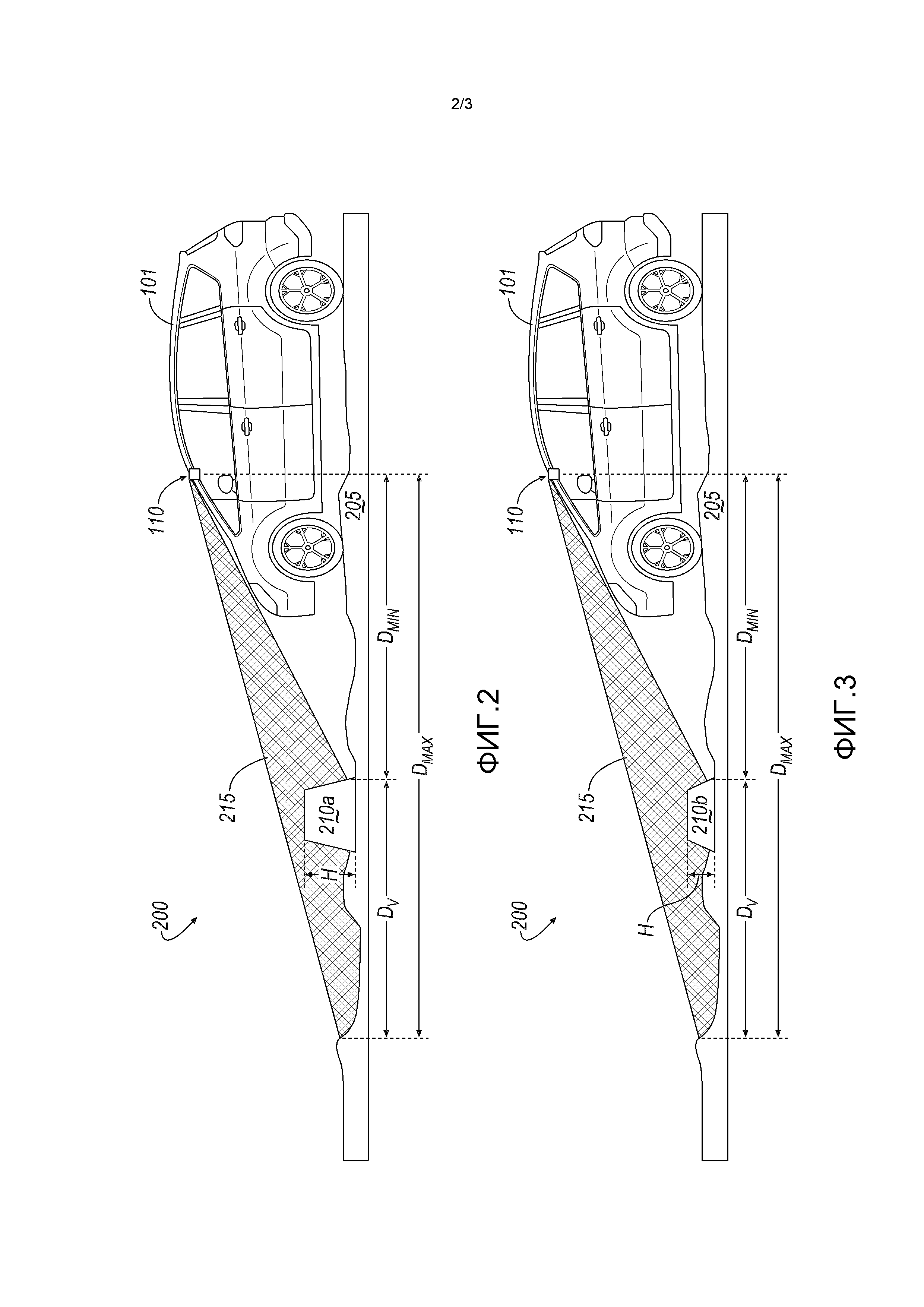
Фиг. 2 иллюстрирует примерную рабочую среду транспортного средства, включающуюся в себя препятствие, которое представляет собой угрозу повреждения днища кузова.
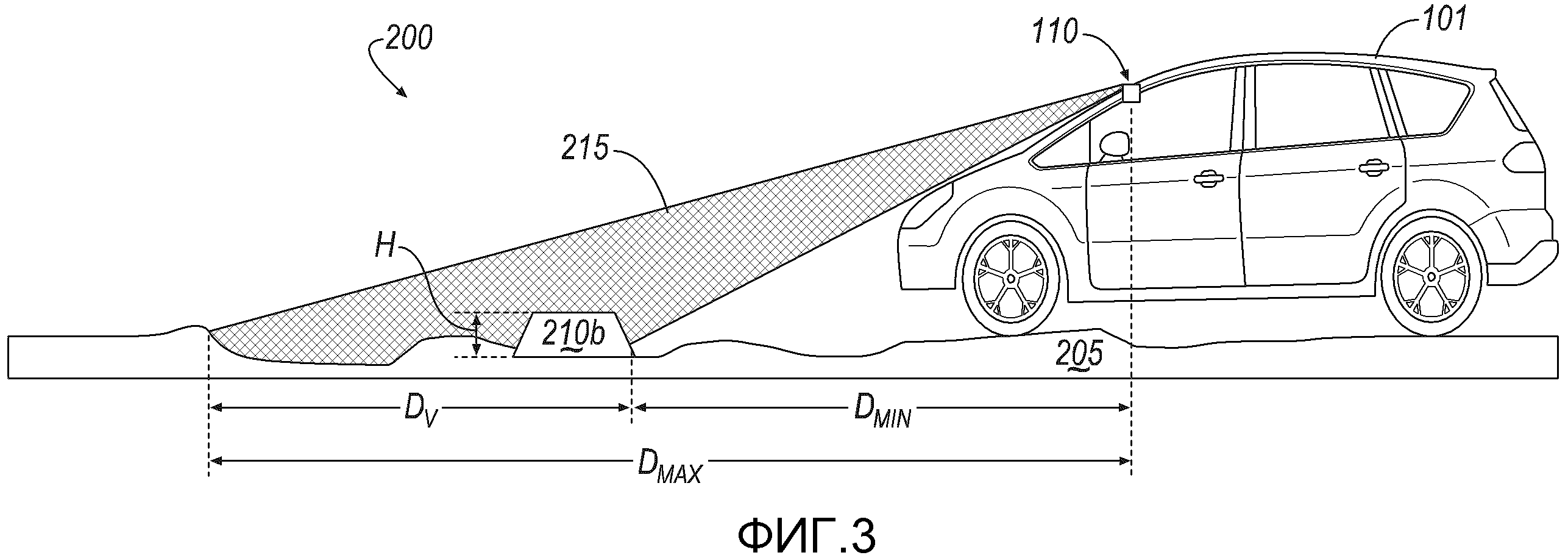
Фиг. 3 иллюстрирует примерную рабочую среду транспортного средства, включающуюся в себя препятствие, которое не представляет собой угрозы повреждения днища кузова.
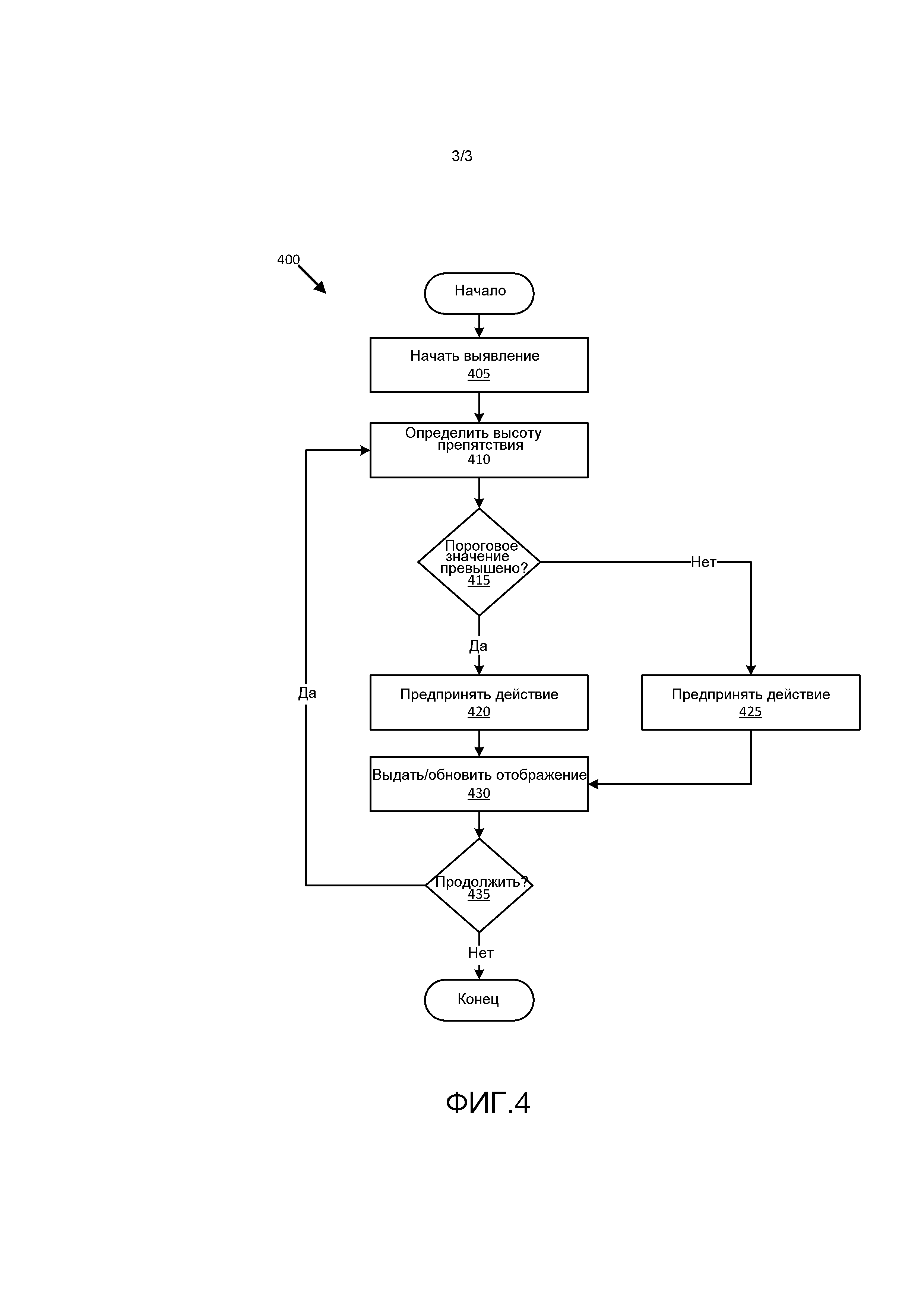
Фиг. 4 - блок-схема последовательности операций способа по примерной последовательности операций для избегания ударов в днище кузова.
ПОДРОБНОЕ ОПИСАНИЕ
ОБЗОР СИСТЕМЫ
Фиг. 1 - структурная схема примерного транспортного средства 101, оборудованного для выявления и контроля бордюрного камня. Транспортное средство 101 как правило включает в себя одно или более устройств 110 сбора данных с датчиками, в частности, видеокамеры, которые могут использоваться для выдачи данных 115 в компьютер 105 транспортного средства во время эксплуатации транспортного средства 101, например, при движении на относительно низких скоростях, например, меньших, чем 15 километров в час. Преимущественно, компьютер 105 может быть запрограммирован использовать данные 115 для выявления бордюрного камня, выбоины или другого препятствия и, более того, может быть выполнен с возможностью определять, продолжается ли препятствие из поверхности для движения, например, проезжей части дороги, автостоянки, и т.д., на высоте, которая представляет собой угрозу удара и/или повреждения днища кузова транспортного средства, например, облицовки, низа кузова, и т.д. Компьютер 105 дополнительно может быть запрограммирован выдавать команду в контроллер компонента в транспортном средстве 101, чтобы уменьшать угрозу, представляемую препятствием, например, в контроллер 125 двигателя для изменения дросселя транспортного средства 101, в контроллер 130 тормозов для нажатия тормозов, например, функциональных возможностей автоматического торможения, и т.д. Кроме того еще, компьютер 105 может быть выполнен с возможностью выдавать уведомление через человеко-машинный интерфейс 120 (HMI) в транспортном средстве 101.
ПРИМЕРНЫЕ ЭЛЕМЕНТЫ СИСТЕМЫ
Как изложено выше, транспортное средство 101 включает в себя компьютер 105 транспортного средства. Транспортное средство 101 как правило является наземным транспортным средством, имеющим три или более колес, например, пассажирским автомобилем, грузовым автомобилем малой грузоподъемности, и т.д. Компьютер 105, как правило, включает в себя процессор и память, память включает в себя одну или более форм машинно-читаемых носителей и хранит команды, исполняемые процессором, для выполнения различных операций, в том числе, как раскрытые в материалах настоящей заявки. Кроме того, компьютер 105 может включать в себя и/или быть присоединенным с возможностью обмена информацией к более чем одному вычислительному устройству, например контроллерам, или тому подобному, включенным в транспортное средство 101 для контроля и/или управления различными компонентами транспортного средства, например, блок управления двигателем, блок управления трансмиссией, и т.д. Компьютер 105, как правило, выполнен с возможностью для поддержания связи через один или более механизмов связи транспортного средства, например, по шине локальной сети контроллеров (CAN) или тому подобному. Компьютер 105 также может иметь соединение с разъемом бортовой диагностики (OBD-II).
Через шину CAN, OBDII и/или другие проводные или беспроводные механизмы, компьютер 105 может передавать сообщения на различные устройства в транспортном средстве и/или принимать сообщения с различных устройств, например, контроллеров, исполнительных механизмов, датчиков, и т.д., в том числе устройств 110 сбора данных, блока 125 управления двигателем (ECU), контроллера 130 тормозов, и т.д. В качестве альтернативы или дополнительно, в случае, где компьютер 105 фактически содержит многочисленные устройства, шина CAN или тому подобное могут использоваться для связи между устройствами, представленными в качестве компьютера 105 в этом раскрытии. В дополнение, компьютер 105 может быть выполнен с возможностью для поддержания связи с другими устройствами с помощью различных проводных и/или беспроводных сетевых технологий, например, сотовых, Bluetooth, универсальной последовательной шины (USB), проводных и/или беспроводных пакетных сетей, и т.д.
Транспортное средство 101 как правило включает в себя по меньшей мере одно устройство 110 сбора данных с камерой. Например, устройство 110 сбора данных с камерой могло бы быть оборудовано для получения неподвижных и/или видеоизображений и могло бы быть моноскопической или стереоскопической камерой. Как лучше всего проиллюстрировано на фиг. 2 и 3, устройство 110 сбора данных с камерой, как правило, установлено на передней части транспортного средства 101, например, в центральном верхнем расположении ветрового стекла транспортного средства 101, с тем чтобы давать поле зрения 215. Как дополнительно обсуждено ниже, поле зрения 215 включает в себя часть рабочей поверхности 205 для транспортного средства 101, в силу чего, камера 110, возможно вместе с одним или более других устройств 110 сбора данных, может выдавать данные 115, по которым компьютер 105 может определять высоту препятствия 210 впереди транспортного средства 101, и угрожает ли препятствие 210 повреждениями у днища кузова транспортного средства 101.
Как уже упомянуто, устройства 110 сбора данных могли бы включать в себя многообразие устройств в дополнение к одному или более устройств 110 сбора данных с камерой. Например, устройства 110 сбора данных с камерой могут включать в себя устройства 110 сбора данных с ультразвуковым датчиком и/или другие устройства 110 сбора данных, которые собирают динамические данные транспортного средства101, такие как скорость, угловая скорость рыскания, угол поворота управляемых колес, и т.д. Кроме того, вышеизложенные примеры не подразумеваются ограничивающими; другие типы устройств 110 сбора данных могли бы использоваться для выдачи данных 115 в компьютер 105. Например, различные контроллеры в транспортном средстве могут работать в качестве устройств 110 сбора данных, чтобы выдавать данные 115 через шину CAN, например, данные 115, относящиеся к скорости, ускорению, местоположению, и т.д., транспортного средства.
Память компьютера 105 как правило хранит собранные данные 115 в дополнение к командам управляющей программы для выполнения операций, в том числе, как описанные в материалах настоящей заявки. Собранные данные 115 могут включать в себя многообразие данных, собранных в транспортном средстве 101. Примеры собранных данных 115 включают в себя измерения и/или расчеты по таким измерениям расстояний до и/или высот объектов, например, потенциальных препятствий 210, таких как бордюрные камни, выбоины, и т.д. Вообще, собранные данные 115 могут включать в себя любые данные, которые могут быть собраны устройством 110 сбора данных или вычислены из таких данных.
Транспортное средство 101 как правило включает в себя человеко-машинный интерфейс 120 (HMI). Вообще, HMI 120 оборудован, чтобы принимать входные данные для и/или выдавать выходные данные из компьютера 105. Например, транспортное средство 101 может включать в себя один или более из устройства отображения, выполненного с возможностью выдавать графический интерфейс пользователя (GUI), или тому подобное, систему интерактивного речевого ответа (IVR), механизмы для выдачи тактильных выходных сигналов, например, через рулевое колесо или сиденье транспортного средства 101, и т.д. Кроме того, пользовательское устройство, например, портативное вычислительное устройство, такое как планшетный компьютер, смартфон, или тому подобное, может использоваться для предоставления некоторой части или всего HMI 120 с компьютером 105. Например, пользовательское устройство могло бы быть присоединено к компьютеру 105 с использованием технологий, обсужденных выше, например, USB, Bluetooth, и т.д. и могло бы использоваться для приема входных данных для и/или выдачи выходных данных из компьютера 105. В любом случае, HMI 120 мог бы выдавать выходные данные касательно препятствий 210, например, описывающие высоту, расстояние, и т.д., препятствия 210, представляет ли собой препятствие угрозу для транспортного средства 101, и т.д. Кроме того, возможны реализации, в которых HMI 120 используется для приема входного сигнала для запуска последовательности операций по выявлению препятствий 210, как упомянуто ниже.
ECU 125 является блоком управления двигателем, таким как известный, например, включающим в себя процессор и память, и запрограммирован выдавать команды, управляющие силовой передачей и/или двигателем транспортного средства 101. Например, ECU мог бы принимать команды через шину CAN транспортного средства, или тому подобное, касательно надлежащего уровня дросселя, величины крутящего момента, и т.д., для силовой передачи транспортного средства 101. Кроме того, компьютер 105 мог бы быть запрограммирован выдавать такую команду на основании выявления препятствия 210.
Контроллер 130 тормозов как правило включает в себя процессор и память, и запрограммирован выдавать команды для управления тормозами транспортного средства 101, например, как известно. Например, контроллер 130 тормозов мог бы принимать команду по шине CAN транспортного средства, или тому подобному, касательно нажатия тормозов транспортного средства 101, и мог бы быть запрограммирован выдавать такую команду на основании определения препятствия 210.
Фиг. 2 и 3 иллюстрируют примерную рабочую среду 200 транспортного средства 101, включающую в себя проезжую часть 205 дороги, имеющую на ней препятствие 210, которое могло бы представлять собой угрозу повреждения днища кузова у транспортного средства 101. Например, фиг. 2 показывает препятствие 210a достаточной высоты, чтобы повреждать днище кузова транспортного средства 101, к примеру, облицовку или низ кузова. Фиг. 3, в противоположность, показывает препятствие 210b, не имеющее высоты, чтобы вероятно повреждать днище кузова транспортного средства 101.
Как также проиллюстрировано на фиг. 2 и 3, устройство 110 сбора данных с камерой как правило имеет поле зрения 215. Что касается расстояния впереди транспортного средства 101, измеряемого по продольной оси транспортного средства 101, поле зрения 215 начинается на расстоянии Dmin, а заканчивается на расстоянии Dmax. Расстояние Dv обзора, также измеряемое по продольной оси транспортного средства 101, определяется в качестве разности между Dmax и Dmin. Будет понятно, что расстояние обзора может зависеть от возможностей конкретного устройства 110 сбора данных с камерой, например, угла обзора объектива камеры 110, и т.д. Кроме того, устройство 110 сбора данных с камерой как правило захватывает в целом прямоугольную зону обзора на поверхности 205, определенную расстоянием Dv обзора и шириной, перпендикулярной расстоянию Dv обзора, зона обзора предусматривается согласно возможностям конкретного устройства 110 сбора данных с камерой.
ПРИМЕРНЫЕ ПОТОКИ ПОСЛЕДОВАТЕЛЬНОСТИ ОПЕРАЦИЙ
Фиг. 4 - блок-схема последовательности операций способа по примерной последовательности 400 операций для избегания ударов в днище кузова. Последовательность 400 операций начинается на вершине 405 блок-схемы, на которой компьютер 105 инициирует выявление препятствий 210. Например, в одной из реализаций, последовательность 400 операций инициируется, когда скорость транспортного средства 101 падает ниже предопределенного порогового значения, например, 15 километров в час. В качестве альтернативы или дополнительно, последовательность 400 операций избегания удара в днище кузова могла бы инициироваться согласно входным данным, принятым через HMI 120, например, указывающим, что начинается операция постановки на стоянку, что транспортное средство 101 проезжает рабочую поверхность, потенциально включающую в себя препятствия 210, такие как лежачие полицейские, или тому подобное, данные 115 глобальной системы определения местоположения (GPS) могли бы использоваться для указания, что транспортное средство 101 находится возле зоны постановки на стоянку и рабочей поверхности 205, включающей в себя лежачие полицейские или другие препятствия 210, и т.д.
Затем, на вершине 410 блок-схемы, компьютер 105 определяет высоту препятствия 210 в зоне обзора. Например, компьютер 105 может принимать собранные данные 115, которые могут использоваться для построения того, что может указываться ссылкой как «карта структуры поверхности» зоны обзора. То есть, если зона обзора является прямоугольной поверхностью, ей могут быть назначены координаты X и Y, и высоты, например, расстояния над высотой рабочей поверхности 205, на которой покоится транспортное средство 101, могут быть назначены различным местоположениям X-Y на карте структуры поверхности, то есть, в пределах зоны обзора. Кроме того, высота H препятствия 210 для зоны обзора могла бы быть определена в качестве наибольшей высоты объекта в зоне обзора, например, наибольшей высоты, ассоциативно связанной с координатами X-Y на карте структуры поверхности. Такая высота могла бы идентифицироваться в качестве высоты препятствия 210 для зоны обзора. Такие данные 115 как правило включают в себя изображения и могли бы включать в себя другие данные, такие как данные с ультразвуковых датчиков, радиолокатора, лазерного локатора или других устройств 110 сбора данных.
Соответственно, высота препятствия 210 могла бы определяться многообразием способов. Например, в одной из реализаций, устройство 110 сбора данных с камерой могло бы выдавать два или более изображений зоны обзора в следующие один за другим моменты времени. Кроме того, собранные данные 115, в дополнение к изображениям, могли бы включать в себя скорость, например, среднюю скорость, транспортного средства 101 между первым и последним такими моментами времени. Высота препятствия 210, в таком случае, могла бы определяться по таким изображениям, например, известным образом. Например, первое изображение препятствия 210 на минимальном расстоянии Dmin могло бы сравниваться с вторым изображением препятствия 210 на максимальном расстоянии Dmax, а высота H препятствия 210 затем определяться посредством учета изменения видимых высот препятствия 210 в соответственных первом и втором изображениях через расстояние Dv, какое расстояние Dv может определяться на основании скорости транспортного средства 101. То есть, изменение со временем видимых высот препятствия 210 в первом и втором изображениях между расстояниями Dmin и Dmax, как будет понятно, могло бы использоваться для определения абсолютной или реальной высоты H препятствия 210. В качестве альтернативы или дополнительно, дополнительные данные 115 могли бы использоваться для составления карты структуры поверхности, например, могли бы использоваться устройства 110 сбора данных с ультразвуковыми датчиками, или тому подобное. Кроме того, как упомянуто выше, могло бы использоваться устройство 110 сбора данных со стереоскопической камерой, например, выдающее два изображения за один раз для измерения высоты H, например, известным образом.
Кроме того, в дополнение к высоте H, отметим, что компьютер 105 мог бы использовать изображения или другие данные 115 для определения крутизны препятствия 210. Например, крутизна могла бы логически выводиться, как известно, посредством измерения соответственных высот препятствия 210 на различных расстояниях, то есть, на по меньшей мере двух расстояниях, от транспортного средства 101, а затем, определения крутизны на основании изменения высот.
Вслед за вершиной 410 блок-схемы, на вершине 415 блок-схемы, компьютер 105 определяет, имеет ли препятствие 210 в зоне обзора высоту H, превышающую пороговую высоту. Например, пороговая высота могла бы определяться согласно просвету, требуемому для избегания удара в днище кузова транспортного средства 101, например, облицовку или низ кузова. Пороговая высота могла бы храниться в памяти компьютера 105. Если пороговая высота превышена, то, вершина 420 блок-схемы выполняется следующей. Иначе, последовательность 400 операций переходит на вершину 425 блок-схемы. Отметим, что, в дополнение к пороговой высоте, компьютер 105 на вершине 410 блок-схемы мог бы принимать во внимание пороговую крутизну препятствия 210. Более того, пороговая высота и пороговая крутизна могли бы быть зависящими друг от друга. Например, пороговая высота без какого бы то ни было учета пороговой крутизны могла бы быть высотой, требуемой для просвета до низа кузова транспортного средства 101, но меньшая пороговая высота могла бы использоваться для крутизны, большей, чем предопределенное пороговое значение, например, 30 градусов, 45 градусов, и т.д.
На вершине 420 блок-схемы, которая может следовать за вершиной 415 блок-схемы, компьютер 105 выдает команду избегать удара между транспортным средством 101 и выявленным препятствием 210, имеющим высоту H, превышающую пороговую высоту. Например, компьютер 105 мог бы отправлять команду в контроллер 132 тормозов применять торможение транспортного средства 101. Команда могла бы быть зависящей от крутизны, а также высоты препятствия 210, например, если препятствие 210 имеет крутизну в определенном диапазоне, например, по существу девяноста градусов, может требоваться большее торможение, тогда как крутизна ниже определенного порогового значения, например, десять градусов или меньше, может служить оправданием более мягкого торможения. Дополнительно или в качестве альтернативы, в качестве дополнительного примера, компьютер 105 мог бы давать команду ECU 125 понижать дроссель транспортного средства 101. Величина торможения, понижения дросселя, и т.д., которая должна быть применена, могла бы зависеть от расстояния до полной остановки транспортного средства 101 на текущей скорости транспортного средства 101 и/или от крутизны препятствия 210. Вслед за вершиной 420 блок-схемы, последовательность 400 операций переходит на вершину 430 блок-схемы.
На вершине 425 блок-схемы, которая может следовать за вершиной 415 блок-схемы, компьютер 105 может предпринимать действие, основанное на определении, что выявленное препятствие 210 имеет высоту H на или ниже пороговой высоты. В некоторых случаях, вершина 425 блок-схемы может быть пропущена, и/или компьютер 105 может быть запрограммирован не предпринимать никаких действий. Однако, в некоторых реализациях, компьютер 105 может быть запрограммирован управлять скоростью транспортного средства 101, когда транспортное средство 101 находится в пределах предопределенного расстояния от препятствия 210. Например, может быть удобно запрограммировать компьютер 105 замедлять, например, тормозить, транспортное средство 101, когда транспортное средство 101 находится близко к бордюрному камню стоянки, или тому подобному, даже если бордюрный камень стоянки не является препятствием 210, которое повреждало бы облицовку или низ кузова транспортного средства 101. В этом контексте, «близко» могло бы подразумевать те случаи, когда транспортное средство 101 находится в пределах полуметра или меньше от препятствия 210, так что торможение приводит к нахождению шин транспортного средства в пределах расстояния 10 сантиметров или менее, когда транспортное средство 101 останавливается ближе к препятствию 210.
На вершине 430 блок-схемы, следующей за вершиной 420 блок-схемы, компьютер 105 может обновлять HMI 120 касательно состояния последовательности 400 операций. Например, если вершина 430 блок-схемы достигнута вслед за вершиной 415 блок-схемы, HMI 120 мог бы указывать «Выявление препятствия выполняется», или некоторое аналогичное сообщение. С другой стороны, если вершина 430 блок-схемы достигнута вслед за вершиной 420 блок-схемы, HMI 120 мог бы указывать «Уведомление - возможный удар о препятствие», «Предупреждение - реализовано избегание препятствия», и/или некоторое другое подобное сообщение. Кроме того еще, если вершина 430 блок-схемы достигнута вслед за вершиной 425 блок-схемы, HMI 120 мог бы указывать «Приближение к бордюрному камню стоянки» и/или некоторое другое подобное сообщение.
Вслед за вершиной 430 блок-схемы, на вершине 435 блок-схемы, компьютер 105 определяет, должна ли продолжаться последовательность 400 операций. Например, транспортное средство 101 могло бы выключаться, мог бы быть принят пользовательский ввод, указывающий, что последовательность 400 операций должна быть закончена, транспортное средство 101 могло бы быть остановлено, установлено в режим «Стоянка», и т.д. Если последовательность 400 операций должна продолжаться, то последовательность 400 операций возвращается на вершину 410 блок-схемы. Иначе, последовательность 400 операций заканчивается.
ЗАКЛЮЧЕНИЕ
Вычислительные устройства, такие как обсужденные в материалах настоящей заявки, каждое, как правило, включает в себя инструкции, исполняемые одним или более вычислительных устройств, такими как идентифицированные выше, и для выполнения вершин блок-схем или этапов последовательностей операций, описанных выше. Например, вершины блок-схем последовательностей операций, обсужденные выше, могут быть воплощены в качестве машинно-исполняемых инструкций.
Машинно-исполняемые команды могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java™™, C, C++, Visual Basic, Java Script, Perl, HTML, и т.д. Вообще, процессор (например, микропроцессор) принимает инструкции, например, из памяти, машинно-читаемого носителя, и т.д., и исполняет эти инструкции, тем самым, выполняя одну или более последовательностей операций, в том числе, одну или более из последовательностей операций, описанных в материалах настоящей заявки. Такие инструкции и другие данные могут храниться и передаваться с использованием многообразия машинно-читаемых носителей. Файл в вычислительном устройстве, как правило является совокупностью данных, хранимых на машинно-читаемом носителе, таком как запоминающий носитель, оперативное запоминающее устройство, и т.д.
Машинно-читаемый носитель включает в себя любой носитель, который принимает участие в предоставлении данных (например, инструкций), которые могут читаться компьютером. Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимые носители, энергозависимые носители, и т.д. Энергонезависимые носители, например, включают в себя оптические или магнитные диски и другую постоянную память. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы машинно-читаемых носителей, например, включают в себя дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM (постоянное запоминающее устройство (ПЗУ) на компакт-диске), DVD (цифровой многофункциональный диск), любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемой расположения отверстий, ОЗУ (оперативное запоминающее устройство, RAM), ППЗУ (программируемое ПЗУ, PROM), СППЗУ (стираемое программируемое ПЗУ, EPROM), флэш-память/ЭСППЗУ (FLASH-EEPROM (электрически стираемое программируемое ПЗУ)), любые другие микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
На чертежах, одинаковые номера ссылок указывают идентичные элементы. Кроме того, некоторые или все из этих элементов могли бы быть изменены. Что касается сред, последовательностей операций, систем, способов, и т.д., описанных в материалах настоящей заявки, должно быть понятно, что, хотя этапы таких последовательностей операций, и т.д., были описаны в качестве происходящих согласно определенной упорядоченной последовательности, такие последовательности операций могли бы быть осуществлены на практике с описанными этапами, выполняемыми в порядке, ином, чем порядок, описанный в материалах настоящей заявки. Кроме того, должно быть понятно, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы, или что некоторые этапы, описанные в материалах настоящей заявки, могли бы быть опущены. Другими словами, описания способов в материалах настоящей заявки предоставлены с целью иллюстрации некоторых вариантов осуществления и никоим образом не должны толковаться, с тем, чтобы ограничивать заявленное изобретение.
В качестве используемого в материалах настоящей заявки, наречие «по существу», являющееся модификацией прилагательного, означает что конструкция или последовательность операций может отклоняться от точно описанной геометрии, формы, временных характеристик, и т.д., вследствие изъянов материалов, механической обработки, производства, обработки данных и/или скоростей обработки данных, возможности сетевого соединения, и т.д.
Соответственно, должно быть понятно, что вышеприведенное описание подразумевается иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, иные, чем приведенные примеры, были бы очевидны специалистам в данной области техники по прочтению вышеприведенного описания. Объем изобретения не должен определяться со ссылкой на вышеприведенное описание, но взамен, должен определяться со ссылкой на прилагаемую формулу изобретения наряду с полным объемом эквивалентов, на которые управомочена такая формула изобретения. Ожидается и подразумевается, что будущие усовершенствования будут происходить в областях техники, обсужденных в материалах настоящей заявки, и что раскрытые системы и способы будут заключены в таких будущих вариантах осуществления. Подводя итог вышесказанному, должно быть понятно, что изобретение является допускающим модификацию и изменение, и ограничено исключительно следующей формулой изобретения.
Все термины, используемые в формуле изобретения, подразумеваются обусловленными своими обычными значениями в качестве понятных специалистам в данной области техники, если в материалах настоящей заявки не приведено явное указание на обратное. В частности, использование форм единственного числа, «упомянутый», и т.д., должно читаться излагающим один или более из указанных элементов, если пункт формулы изобретения не передает явное ограничение иным.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Система адаптивного круиз-контроля транспортного средства
Способ калибровки камеры
Радиолокационная система транспортного средства
Транспортное средство и способ оповещения водителя для полуавтономных режимов работы транспортного средства

