Результат интеллектуальной деятельности: СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к космической технике, в частности к стыковочным устройствам космических аппаратов (КА) и может применяться для обеспечения сцепки, поглощения энергии относительного движения КА, стягивания и выравнивания стыковочных агрегатов.
Известен стыковочный механизм американского космического корабля «Аполлон», описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984. - 216 с., в котором устройства амортизации продольного, углового и бокового относительных движений КА, сгруппированные вокруг его продольной оси, объединены в одну общую кинематическую схему, что приводит к усложнению конструкции, ухудшению условий сцепки и невозможности автоматизации выполнения механического процесса стыковки.
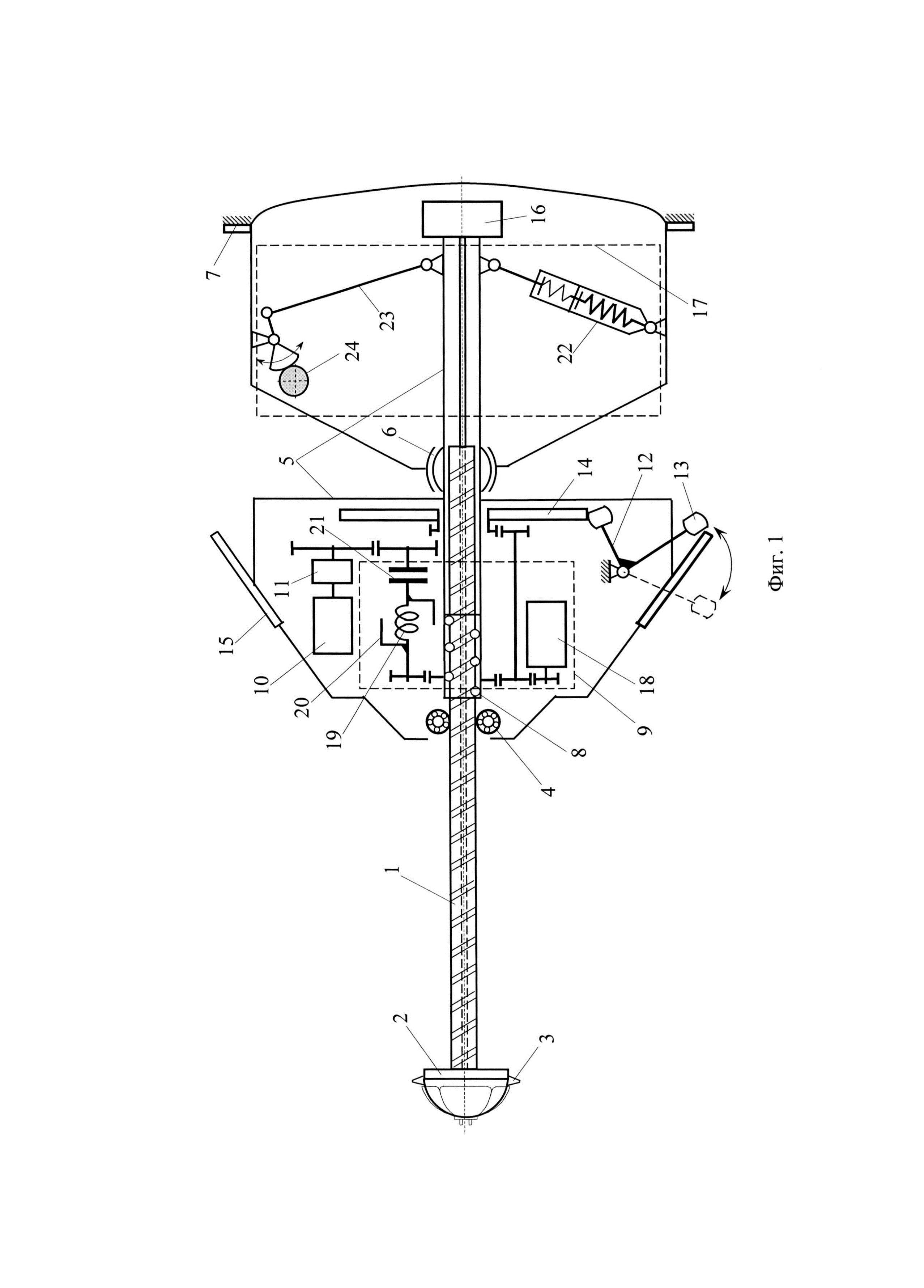
Известен стыковочный механизм космического аппарата, описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984, сс. 149-180 (прототип), в котором устройства амортизации продольного, углового и бокового относительных движений КА, расположенные вокруг его продольной оси, разделены на две независимые группы. Это позволило значительно упростить кинематическую схему, улучшить условия сцепки и использовать управляемый привод для автоматизации выполнения отдельных этапов стыковки. Схема этого стыковочного механизма представлена на фиг. 1. Его основными элементами являются штанга 1 с винтовой поверхностью, головкой 2 и защелками 3, которая, входя в опорные подшипники 4, может поступательно перемещаться относительно подвижного корпуса 5, связанного в своей центральной части двухстепенным шарниром вращения 6 с основанием 7 механизма; размещенные внутри подвижного корпуса 5 шарико-винтовой преобразователь 8, осевой амортизатор 9, привод 10 и стопорная муфта 11, выравнивающие рычаги 12 с роликами 13 с траекторией движения, задаваемой кулачком 14 и обеспечивающей соосное положение стыковочного механизма и приемного конуса при стягивании стыковочных агрегатов; установленные на внешней поверхности корпуса 5 и образующие усеченный конус накладки 15 ограничения угловых движений космических аппаратов; установленный на конце подвижного корпуса 5 привод механизма защелок 16, обеспечивающий их установку в исходное положение перед стыковкой и втягивание внутрь головки после стыковки; боковой амортизатор 17 для демпфирования угловых движений подвижного корпуса 5 в шарнире 6 относительно основания 7 стыковочного механизма. Стыковочный механизм устанавливается на стыковочном агрегате активного (осуществляющего сближение) КА и при стыковке контактирует с приемным конусом стыковочного агрегата, который устанавливается на пассивном КА. Энергия продольного сближения активного КА рассеивается осевым амортизатором.
Основными элементами, демпфирующими энергию сближения активного КА в осевом амортизаторе 9, являются два вращательных электромеханических тормоза (ЭМТ) 18, спиральная пружина 19 с ограничителем углового хода 20, расположенная соосно с первым фрикционным тормозом 21. Вход спиральной пружины 19 и ограничителя углового хода 20 связан с шарико-винтовым преобразователем 8, а выход - со входом первого фрикционного тормоза 21, выход первого фрикционного тормоза 21 связан с приводом 10 стыковочного механизма через стопорную муфту 11.
Основными элементами бокового амортизатора 17 являются два поступательных пружинных механизма 22, соединяющие подвижный корпус 5 с основанием 7 стыковочного механизма, и две тяги 23, соединяющие подвижный корпус 5 с расположенными на основании 7 электромеханическими тормозами 24.
Угловые движения подвижного корпуса 5 в шарнире 6 относительно основания 7 возникают вследствие боковых отклонений штанги 1 при ее контакте с приемным конусом пассивного агрегата, а также при контакте накладок 15 с входной гранью приемного конуса. Поступательные пружинные механизмы 22 и электромагнитные тормозы 24 с тягами 23 создают силы и моменты сил относительно шарнира 6, противодействующие такому движению и ограничивающие амплитуду угловых движений подвижного корпуса 5.
Необходимость модификации конструкции стыковочного механизма-прототипа обусловлена следующими ее недостатками.
Спиральная пружина 19 при просадке штанги (ее ударах в дно гнезда приемный конус) накапливает потенциальную энергию, последующее освобождение которой приводит к обратному движению агрегатов и стыкуемых объектов и удару защелок 3 в упоры гнезда приемного конуса. Эта пружина не имеет обратного хода, поэтому энергия такого обратного удара рассеивается только за счет конструктивных деформаций агрегатов. Вследствие этого сила контактной реакции при обратном ударе по амплитуде часто превышает силу при прямом ударе и поглощении энергии сближения. В результате такого взаимодействия часто возникает серия прямых и обратных ударных импульсов, что нежелательно для конструкции КА, в частности для международной космической станции, которая чувствительна к таким нагрузкам.
Ограничитель углового хода 20 задает малый ход спиральной пружины 19, максимальный момент сопротивления которой примерно в три раза меньше, чем момент сопротивления фрикциона 21. В результате при штатных, но больших скоростях сближения или стыковке кораблей массой более 7 тонн для полного поглощения кинетической энергии сближения задействуется фрикцион 21, что приводит к увеличению динамических нагрузок.
Линия действия контактной реакции ограничительных накладок 15 с приемным конусом, направленная по нормали к их поверхности, проходит очень близко к центру шарнира 6 стыковочного механизма, а оси поступательных пружинных механизмов 22 и тяг 23 электромагнитных тормозов не согласованы по направлению с линией действия контактной реакции. На это указывает фиг. 1. Вследствие этого контактная сила действует практически напрямую на шарнир 6, а значит основание стыковочного механизма 7 и соответственно на корпус активного КА, а энергия удара плохо демпфируется. Поэтому при ограничении угловых движений активного КА, движущегося с большой угловой или боковой скоростью, может возникнуть серия высокочастотных ударных импульсов в начальной фазе контакта ограничителя подвижного корпуса СтМ и приемного конуса пассивного агрегата. Такие ударные нагрузки являются нежелательными для конструкции как стыкуемых КА, так и стыковочного механизма.
Техническим результатом предлагаемого изобретения является снижение уровня динамических нагрузок при стыковке КА.
Технический результат достигается тем, что в стыковочном механизме космического аппарата, содержащем подвижный корпус, связанный с основанием стыковочного механизма двухстепенным вращательным шарниром и боковым амортизатором с поступательными пружинными механизмами, тягами и электромагнитными тормозами, штангу с головкой, имеющей защелки, которая установлена с возможностью поступательного перемещения относительно подвижного корпуса, размещенные в подвижном корпусе шарико-винтовой преобразователь, связанный с ним осевой амортизатор с первым фрикционным тормозом, электропривод, связанный с первым фрикционным тормозом через стопорную муфту, накладки ограничения угловых движений стыковочного механизма, расположенные равномерно с одинаковым угловым шагом на внешней боковой поверхности подвижного корпуса и образующие усеченный конус, в отличие от прототипа, в осевой амортизатор введен второй фрикционный тормоз, соосный с первым фрикционным тормозом, связанный с ним и с шарико-винтовым преобразователем; двухстепенной вращательный шарнир установлен в основании подвижного корпуса, а оси поступательных пружинных механизмов и тяг электромагнитных тормозов бокового амортизатора направлены от основания стыковочного механизма внутрь усеченного конуса, образованного накладками ограничения угловых движений космических аппаратов.
Сущность изобретения поясняется следующими чертежами и рисунками:
фиг. 1 - схема стыковочного механизма-прототипа;
фиг. 2 - схема стыковочного механизма (предлагаемого);
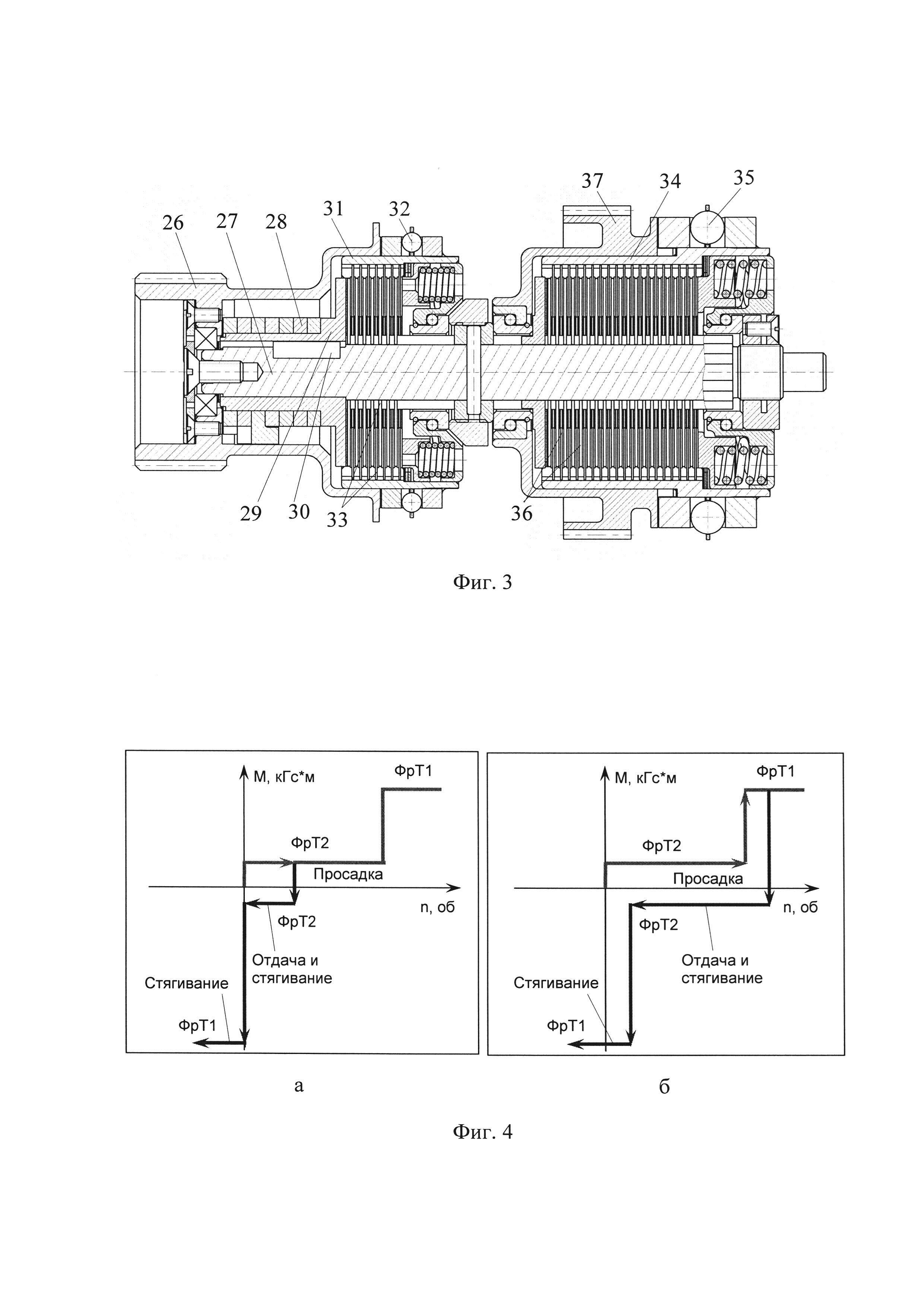
фиг. 3 - конструкция осевого амортизатора стыковочного механизма;
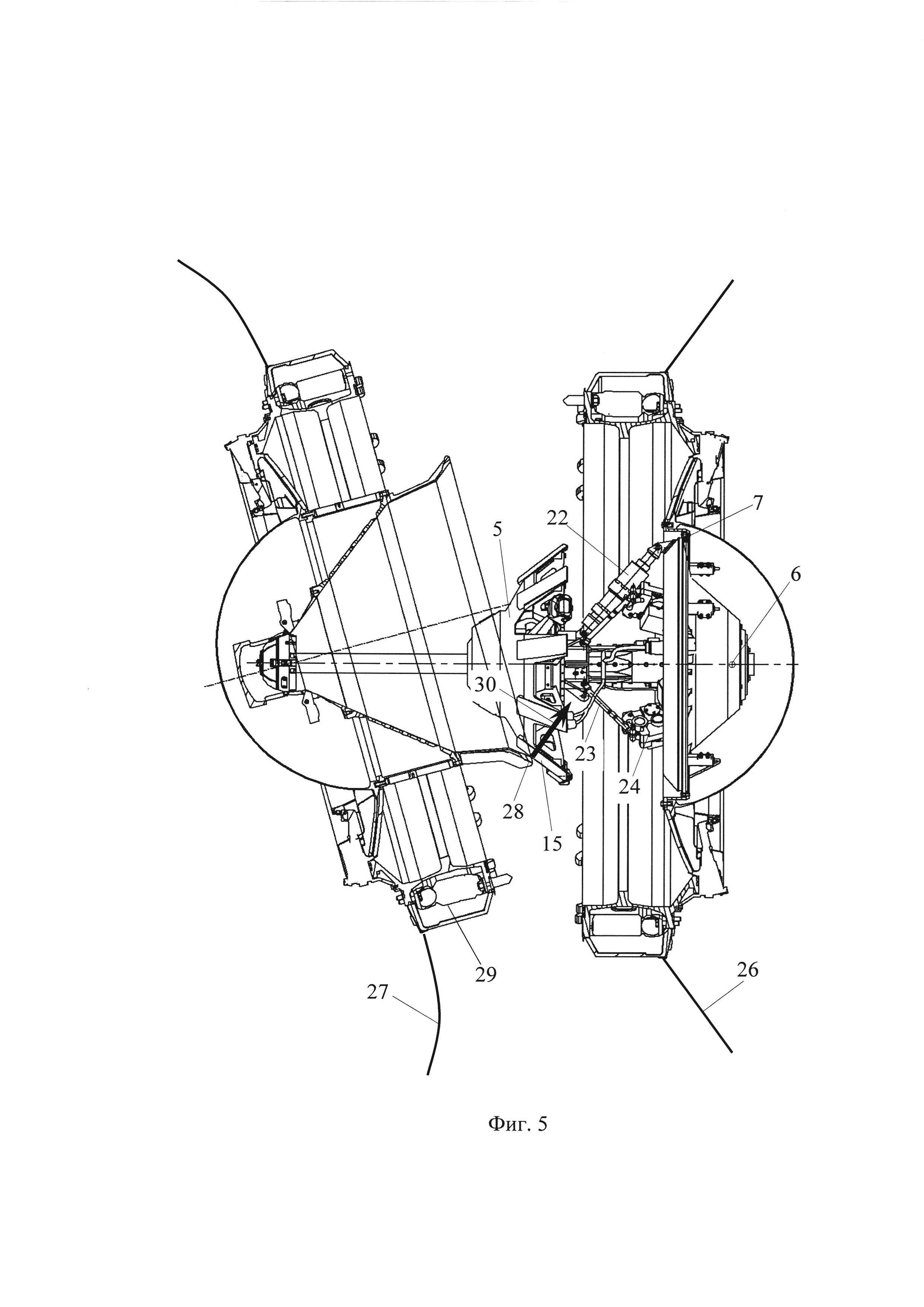
фиг. 4 - зависимость момента сопротивления осевого амортизатора при просадке штанги, отдаче (обратном ударе) и стягивании стыковочных агрегатов;
фиг. 5 - ограничение угловых движений активного космического аппарата относительно пассивного после сцепки.
Основными элементами стыковочного механизма являются штанга 1 с винтовой поверхностью, головкой 2 и защелками 3, которая, входя в опорные подшипники 4, установлена с возможностью поступательного перемещения относительно подвижного корпуса 5, связанного двухстепенным шарниром вращения 6 с основанием 7 механизма; размещенные внутри подвижного корпуса 5 шарико-винтовой преобразователь 8, осевой амортизатор 9, привод 10 и стопорная муфта 11, выравнивающие рычаги 12 с роликами 13 с траекторией движения, задаваемой кулачком 14 и обеспечивающей соосное положение стыковочного механизма и приемного конуса при стягивании стыковочных агрегатов; установленные на внешней поверхности корпуса 5 накладки 15 ограничения угловых движений космических аппаратов; установленный на конце подвижного корпуса 5 привод механизма защелок 16, обеспечивающий их установку в исходное положение перед стыковкой и втягивание внутрь головки после стыковки; боковой амортизатор 17 для демпфирования угловых движений подвижного корпуса 5 в шарнире 6 относительно основания 7 стыковочного механизма. Стыковочный механизм устанавливается на стыковочном агрегате активного (осуществляющего сближение) КА и при стыковке контактирует с приемным конусом стыковочного агрегата, который устанавливается на пассивном КА. Энергия продольного сближения активного КА рассеивается в СтМ осевым амортизатором.
Основными элементами, демпфирующими энергию сближения активного КА в осевом амортизаторе 9, являются первый фрикционный тормоз 21 и установленный соосно и связанный с ним второй фрикционный тормоз 25 с ограничителем углового хода 20. Первый фрикционный тормоз 21 связан с приводом 10 стыковочного механизма через стопорную муфту 11, а второй - с шарико-винтовым преобразователем 8. Двухстепенной вращательный шарнир 6 расположен в основании подвижного корпуса 5, связывая его с основанием 7 стыковочного механизма. Основными элементами бокового амортизатора 17 являются два поступательных пружинных механизма 22, соединяющие подвижный корпус 5 с основанием 7 стыковочного механизма, и две тяги 23 электромагнитных тормозов, соединяющие подвижный корпус 5 с расположенными на основании 7 электромеханическими тормозами 24. Оси поступательных пружинных механизмов 22 и тяг 23 электромагнитных тормозов разворачиваются по направлению от основания 7 внутрь усеченного конуса, образованного накладками 15 ограничения угловых движений космических аппаратов, расположенными на боковой поверхности подвижного корпуса 5 стыковочного механизма.
Конструкция осевого амортизатора представлена на фиг. 3. В него входят входная шестерня 26; вал 27; ограничитель углового движения 20, включающий в себя семь кулачковых шайб 28, а также кулачки входной шестерни 26 и втулки 29, связанной с валом 27 шпоночным соединением 30; второй фрикционный тормоз 21, состоящий из подвижного стакана 31, шарикового регулятора 32 и фрикционных дисков 33; первый фрикционный тормоз 18, состоящий из подвижного стакана 34, шарикового регулятора 35, фрикционных дисков 36 и выходной шестерни 37.
Половина фрикционных дисков 36 первого фрикционного тормоза 21 закреплена на валу 27, а ответные им, образующие пары трения - на подвижном стакане 34, который обеспечивают их относительное вращение. Вращение подвижного стакана 34 связано с выходной шестерней 37 через шариковый регулятор 35, который состоит из набора шариков, установленных в пазы колец. Форма этих пазов ограничивает силу сжатия фрикционных дисков 36 пружиной регулятора и определяет постоянное соотношение моментов сопротивления прямому и обратному направлению их относительного вращения. Первый фрикцион 21 создает моменты сопротивления - меньший прямому ходу, то есть вращению вала 27 по часовой стрелке (при просадке штанги и передаче движения от входной шестерни 26 к выходной шестерне 37) и больший - обратному ходу, то есть вращению вала 27 против часовой стрелки (при втягивании штанги приводом и передаче движения через от выходной шестерни 37 на входную шестерню 26).
Конструкции первого 21 и второго 25 фрикционных тормозов аналогичны. Половина фрикционных дисков 33 закреплена на валу 27, а ответные им, образующие пары трения - в подвижном стакане 31, который обеспечивает их относительное вращение. Но форма пазов дисков шарикового регулятора 32 обеспечивает для второго фрикционного тормоза (в отличие от первого) больший момент сопротивления прямому ходу (вращению входной шестерни 26 по часовой стрелке) и меньший обратному (вращению шестерни 26 против часовой стрелки). При этом больший прямой момент сопротивления дисков 33 второго фрикционного тормоза примерно в три раза меньше, чем наименьший, прямой момент сопротивления дисков 36 первого фрикционного тормоза.
Функционирование СтМ начинается с выдвижения штанги в исходное положение перед стыковкой. В этом случае внешние силы, действующие на штангу, отсутствуют, а момент трения в шарико-винтовом преобразователе 8 и в передаче от него к входной шестерне 26 меньше каждого из моментов сопротивления фрикционных дисков второго и тем более первого фрикционных тормозов. Кулачковые шайбы 28 ограничителя углового движения 20 перед началом выдвижения находятся в своем исходном положении, то есть кулачок каждой из них упирается в обратную сторону кулачка предшествующей, а кулачок первой шайбы - в обратную сторону кулачка на входной шестерне 26. Поэтому вращение вала привода 10 передается через стопорную муфту 11, выходную шестерню 37 и фрикционные диски 36 первого фрикциона, через вал 27, шпоночное соединение 30, втулку 29 и кулачковые шайбы 28 ограничителя угловых движений 20 на входную шестерню 26. При выдвижении штанги шестерня 26 вращается в обратном направлении, то есть против часовой стрелки при взгляде на нее снаружи. В шарико-винтовом преобразователе 8 это вращение преобразуется в линейное перемещение штанги. После выключения привода 10 стопорная муфта 11 блокирует вращение выходной шестерни 37, создавая опору для работы осевого амортизатора 9.
Собственно стыковка начинается с первого удара головки 2 штанги 1 в приемный конус или приемное гнездо пассивного агрегата. При первом и последующих ударах штанга «просаживается», то есть уменьшается ее длина. Это поступательное движение шарико-винтовой преобразователь 8 преобразует во вращение входной шестерни 26 осевого амортизатора 9 в прямом направлении, по часовой стрелке. От шестерни 26 это вращение передается на кулачковые шайбы 28 и через подвижный стакан 31 и шариковый регулятор 32 на фрикционные диски 33. Сначала шестерня 26 вращается относительно первой кулачковой шайбы и ее кулачок движется от зацепления с обратной стороной до зацепления с прямой стороной кулачка первой шайбы. После этого вращение передает входная шестерня 26 совместно с первой из кулачковых шайб 28. По мере увеличения просадки штанги аналогично производится передача вращения всем последующим шайбам. При относительном вращении любой из кулачковых шайб 28 фрикционные диски 33 вращаются друг относительно друга, а вал 27 остается неподвижным, так как любой из моментов сопротивления первого фрикционного тормоза 21 превышает любой момент сопротивления второго фрикционного тормоза 25. При больших, нештатных скоростях сближения активного КА кинетическая энергия может превосходить энергоемкость второго фрикционного тормоза 25. В этом случае все кулачковые шайбы 28 исчерпывают свой ход, то есть кулачок каждой из них упирается в прямую сторону кулачка последующей, а кулачок последней - в упор на втулке 29. После этого входная шестерня 26, кулачковые шайбы 28, втулка 29, подвижный стакан 31, шариковый регулятор 32 и фрикционные диски 33 вращаются как одно целое совместно с валом 27. Фрикционные диски 31 не создают момент сопротивления, так как не уже вращаются относительно друг друга, и вращению входной шестерни 26 и вала 27 противодействует момент, создаваемый фрикционными дисками 36 второго фрикциона. Сила сопротивления просадке штанги возрастает примерно в 3 раза.
Число кулачковых шайб 28, по сравнению с конструкцией-прототипом увеличено с 2 до 7, поэтому суммарный угловой ход ограничителя 20 увеличился в 2.5 раза. Это позволило снизить постоянный момент сопротивления фрикционных дисков 33 и соответственно силу сопротивления просадке штанги до величины, обеспечивающей поглощение осевой скорости активного КА при его штатном сближении без передачи вращения на вал 27 и первый фрикционный тормоз 21. Меньший по величине момент сопротивления дисков 33 обратному вращению обеспечивают малую амплитуду контактной силы при обратном ударе защелок головки штанги в упоры гнезда приемного конуса.
Плотный контакт головки 2 и ее датчиков к приемному конусу пассивного агрегата обеспечивается большой изгибной податливости полой штанги 1. Использование в осевом амортизаторе 9 только фрикционных тормозов приводит к тому, что при осевых ударах накапливается значительно меньшая потенциальная энергия, обусловленная только конструктивными деформациями стыковочного механизма. Вследствие этого амплитуда и длительность действия силы обратного удара всегда значительно меньше, чем прямого. Серии прямых и обратных ударов отсутствуют из-за наличия силы трения головки штанги в приемном гнезде.
При втягивании штанги 1 вращение вала привода 10 передается через стопорную муфту 11 на выходную шестерню 37 первого фрикционного тормоза 21, и далее через фрикционные диски 36 на вал 27. Момент трения в шарико-винтовом преобразователе 8 и в передаче к входной шестерне 26 меньше, чем момент сопротивления фрикционных дисков 33. Поэтому при отсутствии внешних сил, препятствующих втягиванию штанги, вращение вала 27 через фрикционные диски 33, шариковый регулятор 32 и подвижный стакан 31 передается на входную шестерню 26. Кулачковые кольца 28 вращаются совместно с ними, с втулкой 29, а не относительно друг друга. При штатной стыковке на завершающей стадии стягивания стыковочныхагрегатов защелки 3 прижимаются к упорам гнезда приемного конуса и оказывают сопротивление втягиванию штанги 1, создавая через шарико-винтовой преобразователь 8 соответствующий момент сопротивления, приложенный к входной шестерне 26 и превышающий обратный момент сопротивления фрикционных дисков 33. Вследствие этого кулачковые шайбы 28 ограничителя 20 углового движения, благодаря вращению вала 27 и втулки 29 в направлении обратном тому, которое имеет место при просадке штанги (то есть против часовой стрелки), приходят в свое исходное положение. Осевой амортизатор готов к следующей стыковке. После этого вращение вала 27 передается непосредственно на входную шестерню 26. Втягивание штанги 1 продолжается до достижения ею конечного (втянутого) положения, в котором привод 10 останавливается по сигналу контактного устройства.
Зависимость момента М сопротивления осевого амортизатора 9 от направления вращения и числа оборотов n его входной шестерни 27 (при просадке штанги или обратном ударе) или выходной шестерни 37 (при стягивании стыковочных агрегатов) показана на фиг. 4 для штатной (а) и повышенной нештатной (б) скоростей сближения. Участок работы первого и второго фрикционных тормозов обозначен как ФрТ1 и ФрТ2.
Конструкция входной шестерни 26, вала 27, кулачковых шайб 28, втулки 29, шпонки 30 ограничителя 20 угловых движений, подвижного стакана 34, шарикового регулятора 35, фрикционных дисков 36 и выходной шестерни 37 первого фрикционного тормоза 21 аналогична существующим в стыковочном механизме-прототипе.
В боковом амортизаторе 17 поступательные пружины 22 и электромагнитные тормозы 24 с тягами 23 создают силы и моменты сил относительно шарнира 6, противодействующие угловым движениям подвижного корпуса 5 и ограничивающие их амплитуду. До сцепки такие угловые движения возникают вследствие боковых отклонений штанги 1 при контактах ее головки 2 с приемным конусом пассивного агрегата.
После сцепки головка 2, перемещаясь в гнезде приемного конуса, и не ограничивает боковые и угловые перемещения активного стыковочного агрегата относительно пассивного. Угловое движение стыковочного механизма и активного КА 26 относительного пассивного КА 27 ограничивается только при контакте накладок 15 с входной гранью 28 приемного конуса пассивного агрегата 29, как показано на фиг. 5. Для демпфирования энергии этого движения активный КА 26 должен вращаться относительно шарнира 6, а боковой амортизатор 17 должен создавать момент сопротивления этому вращению. Необходимый момент создается только при наличии опоры у подвижного корпуса 5 стыковочного механизма. Такая опора возникает при непрерывном контакте накладок 15 подвижного корпуса 5 и входной грани 28 приемного конуса пассивного агрегата. Сила реакции 30 при таком контакте направлена по нормали к поверхности накладок 15 и согласуется с направлениями осей поступательных пружинных механизмов 22 и тяг 23 электромагнитных тормозов 24. Поэтому ее амплитуда нарастает плавно по мере сжатия поступательных пружин 22 и контакт является непрерывным. Активный КА 26 и основание 7 стыковочного механизма разворачиваются в шарнире 6 относительно подвижного корпуса 5 и соответственно относительно пассивного агрегата 29 и пассивного КА 27. Энергия этого разворота демпфируется поступательными пружинами 22 и электромагнитными тормозами 24. Высокочастотные ударные нагрузки при контакте накладок 15 подвижного корпуса 5 с входной гранью 28 приемного конуса пассивного агрегата отсутствуют.
Конструкция штанги 1 с головкой 2 и защелками 3, подвижного корпуса 5 с опорными подшипниками 4 и накладками 15 ограничения угловых движений космических аппаратов, поступательных пружинных механизмов 22, тяг 23 и электромагнитных тормозов 24 аналогична существующим в стыковочном механизме-прототипе.
Стыковочный механизм космического аппарата, содержащий подвижный корпус, связанный с основанием стыковочного механизма двухстепенным вращательным шарниром и боковым амортизатором с поступательными пружинными механизмами, тягами и электромагнитными тормозами, штангу с головкой и защелками, которая установлена с возможностью поступательного перемещения относительно подвижного корпуса, размещенные в подвижном корпусе шарико-винтовой преобразователь, связанный с ним осевой амортизатор с первым фрикционным тормозом, электропривод, связанный с первым фрикционным тормозом через стопорную муфту, накладки ограничения угловых движений стыковочного механизма, расположенные равномерно с одинаковым угловым шагом на внешней боковой поверхности подвижного корпуса и образующие усеченный конус, отличающийся тем, что в осевой амортизатор введен второй фрикционный тормоз, соосный с первым фрикционным тормозом, связанный с ним и с шарико-винтовым преобразователем; двухстепенной вращательный шарнир установлен в основании подвижного корпуса, а оси поступательных пружинных механизмов и тяг электромагнитных тормозов бокового амортизатора направлены от основания стыковочного механизма внутрь усеченного конуса, образованного накладками ограничения угловых движений космических аппаратов.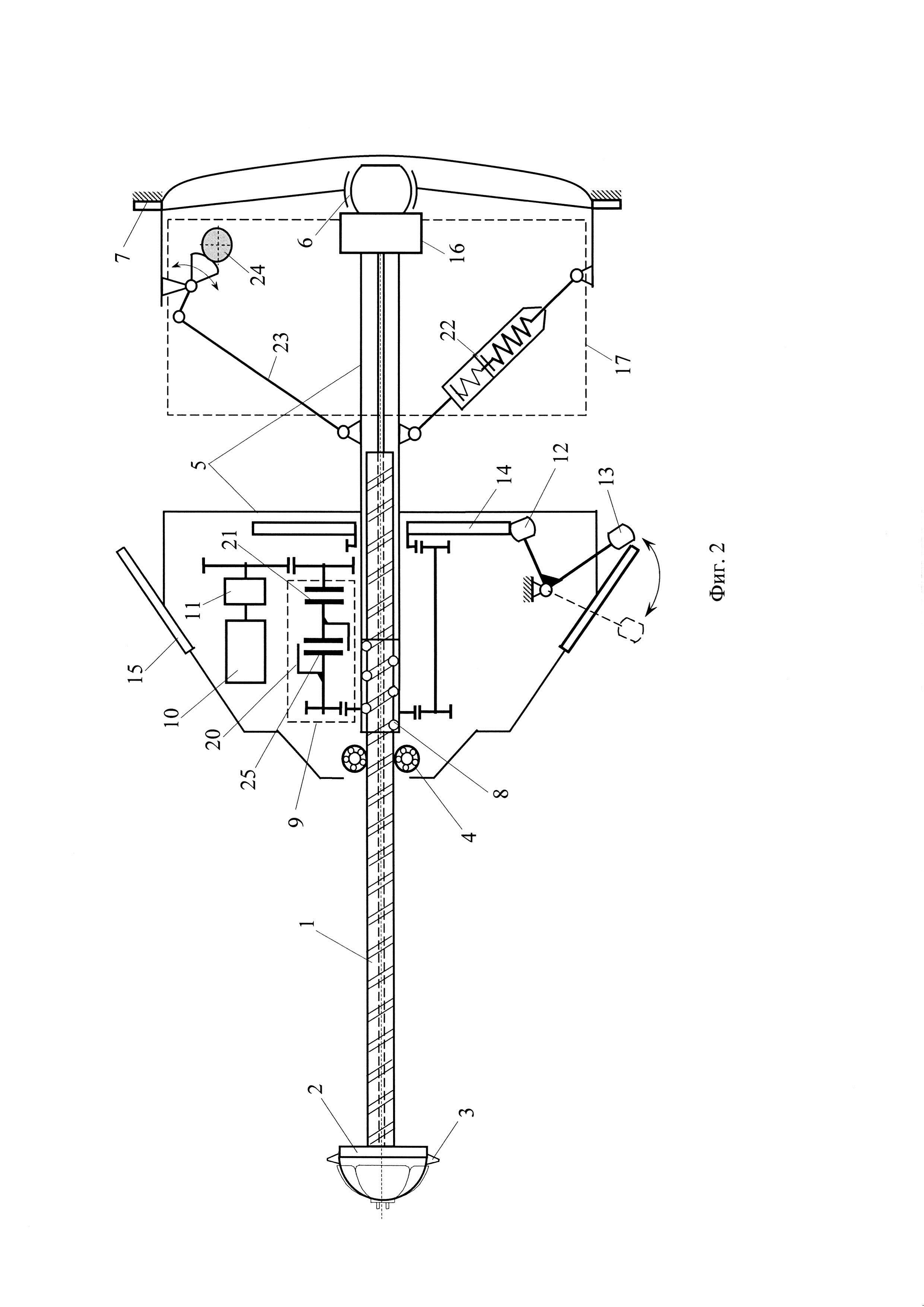

Способ испытания пневмогидравлической системы
Способ наблюдения наземных объектов с движущегося по околокруговой орбите космического аппарата
Способ контроля текущего состояния панели солнечной батареи космического аппарата
Ракетный разгонный блок
Способ определения уровня диэлектрического вещества
Способ определения положения фронтальной части ледника с находящегося на околокруговой орбите космического аппарата
Электронасосный агрегат
Способ определения параметров движения наблюдаемого с космического аппарата ледника
Протяженная рукоятка многофункционального инструмента для использования в условиях невесомости
Способ управления стационарным плазменным двигателем
Активное устройство фиксации полезного груза преимущественно к корпусу находящегося на орбите космического корабля
Механизм герметизации стыка стыковочного агрегата космического корабля
Периферийный стыковочный механизм
Стыковочный механизм космического аппарата
Спиральный пружинный механизм
Гидроразъем
Электромагнитный фрикционный многодисковый тормоз
Планетарный редуктор
Планетарный редуктор
Электромагнитный фрикционный многодисковый тормоз

