Результат интеллектуальной деятельности: УСТРОЙСТВО СТЯГИВАНИЯ ПЕРИФЕРИЙНОГО СТЫКОВОЧНОГО МЕХАНИЗМА
Вид РИД
Изобретение
Изобретение относится к машиностроению, преимущественно к космической технике.
Известно устройство стягивания, которое является неотъемлемой частью андрогинного периферийного агрегата стыковки (АПАС), описанного в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М: Машиностроение, 1984. - 216 сив патенте RU (11)2131829 «Андрогинный периферийный агрегат стыковки и демпфер амортизационно-приводной системы для него» (аналог).
Недостатком конструкции устройства стягивания является невозможность быстрого выдвижения стыковочного кольца из исходного положения (ИП) вперед навстречу пассивному агрегату при первом контакте с ним для улучшения условий сцепки из-за жесткой кинематической связи стыковочного кольца и привода с редуктором.
Известно устройство стягивания в составе периферийного стыковочного механизма (СтМ) американского космического корабля (КА) «Аполлон», описанного в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. -М.: Машиностроение, 1984.-41 с.
Недостатком конструкции устройства стягивания СтМ КА «Аполлон» являются возможность выведения СтМ только в переднее положение, в котором условия сцепки является наихудшим среди всех его положений с одинаковыми длинами штанг, а также возможность образования слабины свободной части тросов, которые при другой компоновке СтМ могут привести к зацеплению за элементы его конструкции.
Известно устройство стягивания в составе периферийного стыковочного механизма, описанного в патенте РФ №2657623 (прототип).
Периферийный СтМ содержит блок управления, стыковочное кольцо с направляющими выступами и установленными на них корпусами механизмов защелок для сцепки; штанги, установленные с возможностью изменения их длины независимо друг от друга, и которые первым своим концом связанны вращательными шарнирами со стыковочным кольцом, а вторым связаны вращательными шарнирами с неподвижным основанием; а также электропривод с редуктором, при этом каждый трос через направляющий ролик и пружины компенсации разности длин тросов при окончательном втягивании соединен с корпусом механизма защелок на одном из направляющих выступов стыковочного кольца. Элементами каждой штанги являются шарико-винтовой преобразователь, связанный с ним редуктор, как минимум, один пружинный механизм, установленный снаружи корпуса штанги и связанный с редуктором, храповой механизм, связанный с валом пружинного механизма, электромагнитная фрикционная муфта, связанная с храповым механизмом и устройство контактное, связанное с редуктором.
Устройство стягивания в составе периферийного СтМ содержит установленные на неподвижном основании барабан намотки тросов и связанный с ним электропривод, имеющий редуктор, пружины компенсации разности длин тросов при окончательном втягивании, установленные на корпусах защелок стыковочного кольца, тросы, одним концом прикрепленные к пружинам компенсации разности длин тросов при окончательном втягивании, а другим к барабану намотки тросов, направляющие ролики, установленные на неподвижном основании и взаимодействующие с тросами.
Перед стыковкой СтМ выводится в промежуточное, исходное положение (ИП) посредством увеличения длины штанг за счет взаимодействия составляющих их элементов и соответственно выдвижения стыковочного кольца вдоль продольной оси СтМ по направлению от его основания. Для реализации этого выдвижения электропривод включается в направлении, при котором барабан намотки троса начинает вращаться, освобождая тросы, концы которых, связанные с устройствами компенсации разности длин тросов при окончательном втягивании, вытягиваются вслед за стыковочным кольцом.
При достижении всеми штангами заданной длины, соответствующей промежуточному, исходному положению кольца, включается временная блокировка их дальнейшего удлинения, а электропривод с редуктором продолжает вращать барабан намотки троса в направлении удлинения тросов, создавая запас их длины, который будет необходим для быстрого выдвижения навстречу пассивному агрегату по сигналу первого контакта для улучшения условий сцепки. После освобождения достаточного запаса длины тросов для выдвижения кольца электропривод выключается. СтМ при этом находится в ИП.
При первом контакте СтМ, находящегося в ИП, с пассивным агрегатом выключается блокировка увеличения длин штанг, эти длины быстро увеличиваются за счет взаимодействия элементов штанг и, как следствие, кольцо СтМ быстро выдвигается навстречу пассивному агрегату для улучшения условий сцепки с ним. Тросы не препятствуют этому выдвижению, так как имеют запас длины.
После сцепки увеличение длин штанг блокируется, штанги могут только уменьшать свою длину и при этом за счет взаимодействия их элементов поглощать кинетическую энергию движения активного КА. После поглощения этой энергии электропривод включается в направлении, при котором барабан намотки троса, уменьшает свободную длину тросов и, как следствие, длину штанг вплоть до достижения полностью втянутого, конечного положения СтМ.
Недостатком конструкции является намотка тросов на один барабан намотки тросов, установленный на выходном валу электропривода. При этом направляющие ролики, с которых тросы непосредственно направляются к пружинам компенсации разности длин тросов при окончательном втягивании, расположены на периферии стыковочного агрегата, под соответствующими направляющими выступами стыковочного кольца. Для обеспечения возможности быстрого выдвижения СтМ из ИП для сцепки за счет потенциальной энергии пружин электропривод заранее должен увеличить длину тросов, сходящих с барабанов намотки тросов, не менее чем на величину, соответствующую достижению переднего, максимального выдвинутого положения штанг. Эти дополнительно освобожденные части тросов, будут образовывать петли, которые могут приводить к сходу тросов с барабана намотки тросов, их намотке на элементы конструкции СтМ, то есть к потере функций устройства стягивания СтМ в целом. Если эта проблема может быть решена установкой на барабаны намотки тросов пружинных устройств выборки слабины (предотвращения петель) тросов, то остается другая - длинные тросовые передачи являются источником трения вследствие перегибов тросов на направляющих роликах. Это замедляет и делает неравномерным выдвижение штоков штанг и кольца СтМ вперед из ИП и значительно ухудшает условия сцепки.
Техническим результатом предлагаемого изобретения является исключение нештатной работы СтМ, вызванной слабиной (провисанием) тросов при создании запаса их хода перед выдвижением СтМ из ИП вперед навстречу пассивному агрегату, а также снижения трения, что увеличивает скорость этого выдвижения и создает лучшие условия для сцепки.
Технический результат достигается тем, что в устройство стягивания периферийного стыковочного механизма, содержащее установленные на неподвижном основании барабан намотки тросов и электропривод, имеющий редуктор, пружины компенсации разности длин тросов при окончательном втягивании, установленные на корпусах защелок стыковочного кольца, тросы, одним концом прикрепленные к пружинам компенсации разности длин тросов при окончательном втягивании, в отличие от известного введены дополнительные барабаны намотки тросов, при этом общее количество барабанов соответствует количеству тросов, причем к каждому барабану намотки тросов соответствующий трос прикреплен своим вторым концом, также введены силовые редукторы, число которых равно числу барабанов намотки тросов, причем силовые редукторы, расположенные на неподвижном основании, связаны своими входными валами с электроприводом посредством механических передач, а между барабанами намотки тросов и выходными валами силовых редукторов расположены кулачковые шайбы, а также введены пружины подмотки тросов, связанные одним концом с барабанами намотки тросов, а другим - с опорой.
В устройстве стягивания периферийного стыковочного механизма механические передачи могут быть выполнены в виде валов.
В устройстве стягивания периферийного стыковочного механизма механические передачи могут быть выполнены в виде зубчатых зацеплений.
В устройстве стягивания периферийного стыковочного механизма опорой может являться выходной вал силового редуктора.
В устройстве стягивания периферийного стыковочного механизма опорой может являться неподвижное основание.
Суть изобретения поясняется графическими материалами:
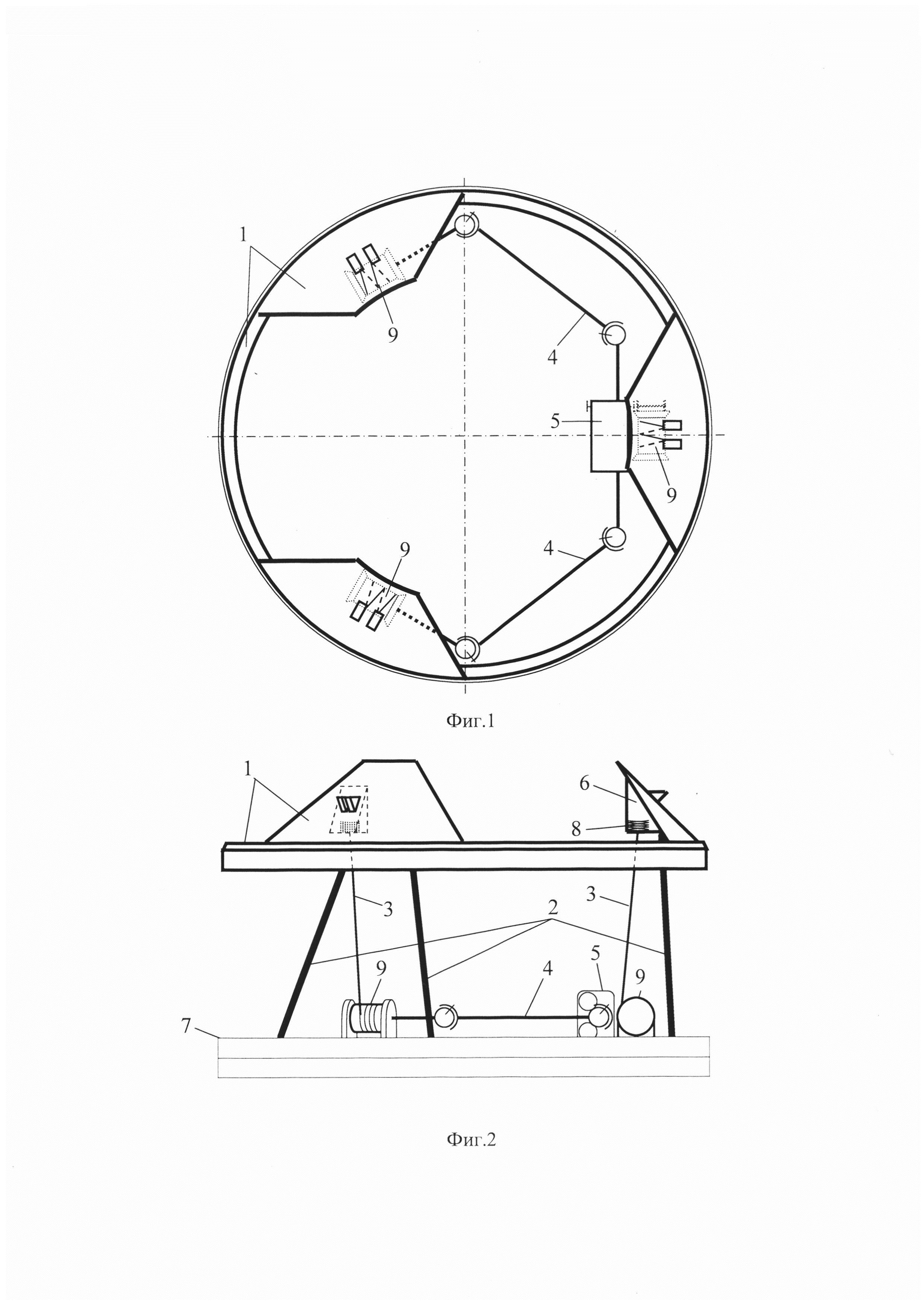
фиг. 1 - схема компоновки устройства стягивания периферийного стыковочного механизма, вид сверху;
фиг. 2 - схема компоновки устройства стягивания периферийного стыковочного механизма, вид спереди;
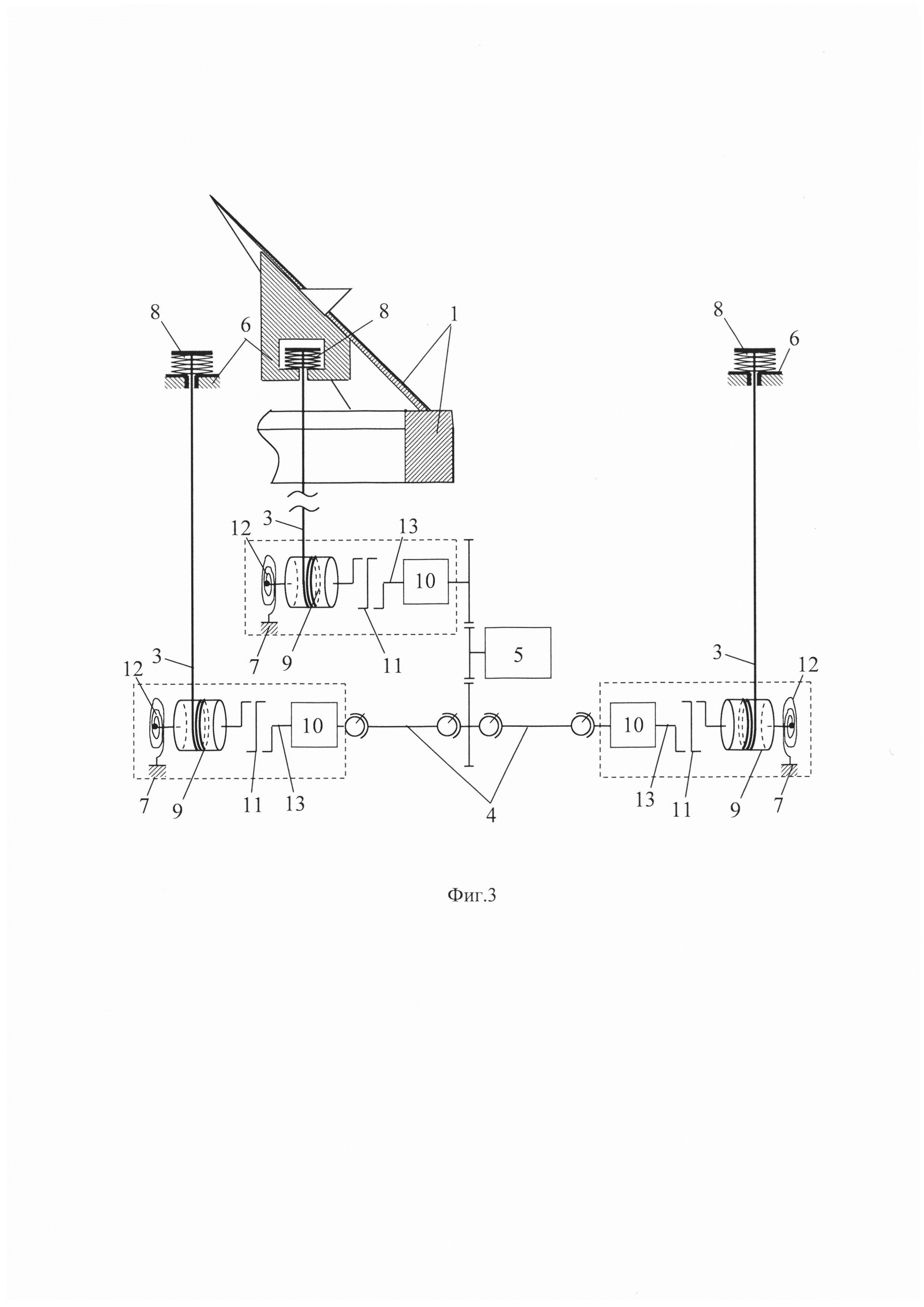
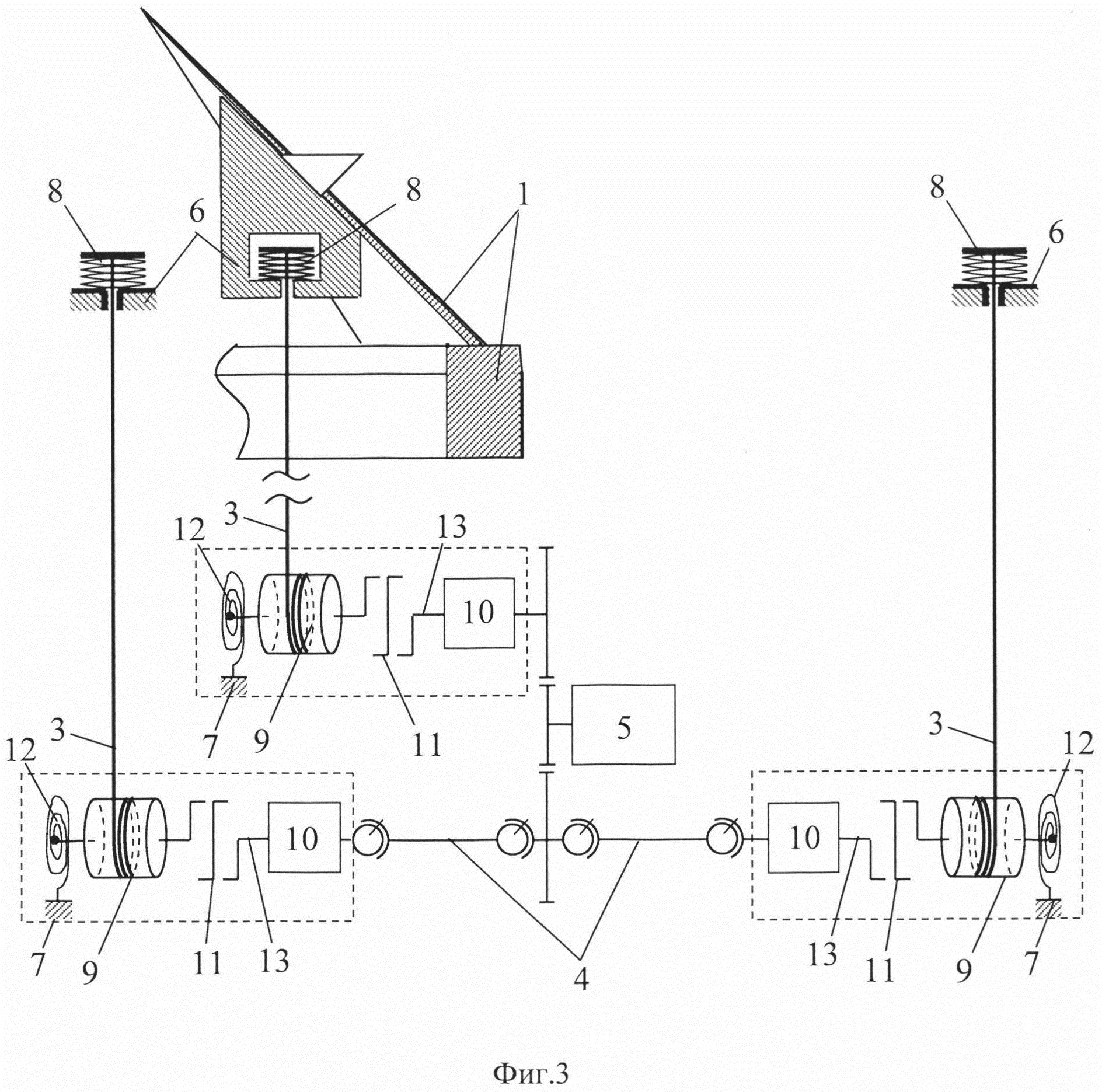
фиг. 3 - кинематическая схема устройства стягивания периферийного стыковочного механизма.
На фиг. 1-3 приняты следующие обозначения: 1 - стыковочное кольцо с направляющими выступами; 2 - штанга; 3 - трос; 4 - механические передачи (валы); 5 - электропривод; 6 - корпус механизма защелок; 7 - неподвижное основание; 8 - пружина компенсации разности длин тросов при окончательном втягивании; 9 - барабан намотки тросов; 10 - силовой редуктор; 11 - кулачковые шайбы; 12 - пружина подмотки тросов, 13 - выходной вал силового редуктора.
Устройство стягивания периферийного стыковочного механизма содержит барабаны намотки тросов 9 и электропривод 5, установленные на неподвижном основании 7, пружины компенсации разности длин тросов при окончательном втягивании 8, установленные на корпусах механизма защелок 6 стыковочного кольца 1; тросы 3, одним концом прикрепленные к пружинам компенсации разности длин тросов при окончательном втягивании 8, а другим - к своему отдельному барабану намотки тросов 9, при этом перегибы тросов между барабанами намотки тросов 9 и пружинами компенсации длин тросов 8 отсутствуют; силовые редукторы 10, числом равным числу барабанов намотки тросов 9, обеспечивающие основной вклад в создание необходимой величины силы натяжения тросов при стягивании и устанавливающиеся внутри корпусов барабанов намотки тросов 9 или непосредственно рядом с ними, связанные своими входными валами с электроприводом 5 посредством зубчатого зацепления или валов 4; кулачковые шайбы 11, расположенные между барабанами намотки тросов 9 и выходными валами силовых редукторов 13, и обеспечивающие независимые от электропривода 5 повороты барабанов намотки тросов 9 в заданном ограниченном диапазоне; пружины подмотки тросов 12, связанные с одной стороны с барабанами намотки тросов 9, а с другой - с опорой, которой могут быть выходные валы силовых редукторов 13 или неподвижное основание 7, исключающие слабину свободной части тросов 3 между барабанами намотки тросов 9 и соответствующими пружинами компенсации разности длин тросов при окончательном втягивании 8 на стыковочном кольце.
Валы 4 в составе устройства стягивания периферийного стыковочного механизма могут быть выполнены, например, в виде карданных валов, валов с коническими шестернями, гибких валов (тросовых) и других. Конкретный вид может быть выбран в соответствии с заданными требованиями к устройству стягивания периферийного стыковочного механизма.
Устройство стягивания периферийного стыковочного механизма работает следующим образом. Для выдвижения СтМ в промежуточное, исходное положение электропривод 5 включается в направлении удлинения тросов 3 и приводит во вращение кинематическую цепь, состоящую из валов 4, силовых редукторов 10, кулачковых шайб 11, барабанов намотки тросов 9 и снимается блокировка удлинения штанг 2. Это позволяет стыковочному кольцу 1 перемещаться в осевом направлении от основания 7, при этом взводятся пружины подмотки тросов 12 (в случае их связи с неподвижным основанием 7). По достижению заданной длины штанг 2 индивидуально блокируется возможность их удлинения. При этом электропривод 5 не выключается, а продолжает работать в направлении удлинения тросов 3. Взведенные пружины подмотки тросов 12 препятствуют расслаблению тросов 3, останавливая тем самым вращение барабанов намотки тросов 9. Поскольку выходные валы силовых редукторов 13 продолжают вращаться на удлинение тросов, кулачковые шайбы 11 увеличивают свои хода относительно выходных валов силовых редукторов 13. По достижению заданной максимальной величины этого хода во всех в кулачковых шайбах 11 электропривод 5 выключается. СтМ находится в положении ИП (готов к стыковке).
При первом контакте СтМ с пассивным агрегатом уменьшается длина одной или нескольких штанг 2. Блок управления СтМ фиксирует это изменение и снимает блокировку удлинения штанг 2, штанги удлиняются и стыковочное кольцо 1 выдвигается вперед, навстречу пассивному агрегату, улучшая условия сцепки. При этом кулачковые шайбы 11 вращаются, уменьшая запас своего относительного хода относительно выходных валов силовых редукторов 13, поэтому неподвижные выходные валы силовых редукторов 13 не препятствует вращению барабанов намотки тросов 9 в сторону удлинения тросов 3. Пружины подмотки тросов 12 при этом взводятся. Отсутствие перегибов тросов 3 при этом существенно снижает их трение и, соответственно, силу противодействия выдвижению кольца 1.
По достижению сцепки включается блокировка увеличения длин штанг 2. Это приводит к тому, что кинетическая энергия сближения КА расходуется на перемещение стыковочного кольца 1 в сторону основания 7. На тросах 3 при этом может образовываться слабина, которая выбирается за счет поворота барабанов намотки тросов 9, раскручивающихся при этом пружин подмотки тросов 12 и увеличения хода кулачковых шайб 11 относительно выходного вала силового редуктора 13.
По окончанию относительного движения космических аппаратов выполняется их стягивание. При этом выходной вал электропривода 5 включается в направлении укорачивания тросов 3, это приводит к уменьшению до нуля хода кулачковых шайб 11 относительно выходных валов силовых редукторов 13, а затем к вращению барабанов намотки тросов 9. При этом минимальный ход кулачковых шайб 11 относительно выходного вала силового редуктора 13 имеет место для того барабана намотки тросов 9, у которого свободная часть троса 3 имеет максимальную длину, поэтому электропривод 5 через валы 4, силовые редукторы 10 и кулачковые шайбы 11 в первую очередь втягивает именно этот трос 3. Это обеспечивает выравнивание свободных длин тросов и как следствие выравнивание стыковочного кольца 1 относительно основания 7.
Устройство стягивания периферийного стыковочного механизма может быть применено в Периферийном стыковочном механизме.
Система управления размещенной на космическом корабле переносной аппаратурой наблюдения
Способ управления транспортной космической системой при перелёте космического корабля с орбиты луны на орбиту земли
Способ управления транспортной космической системой
Система раскрытия посадочных опор космического корабля
Система управления размещенной на космическом корабле переносной аппаратурой наблюдения
Способ контроля скорости относительного движения космических аппаратов
Способ определения ориентации космического аппарата по сигналам навигационных спутников
Дипольная антенна
Устройство терморегулирования космического аппарата
Спутник-ретранслятор
Планетарный редуктор
Телескопическое стреловое устройство

