Результат интеллектуальной деятельности: ВНУТРИРОТОВОЕ УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ ВЕРХНИХ ДЫХАТЕЛЬНЫХ ПУТЕЙ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Данная заявка имеет приоритет по предварительной заявке на патент США No. 62/141,289, поданной 1 апреля 2015 г., раскрытие которой в полном объеме включено в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к медицинским устройствам для поддержки верхних дыхательных путей.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Нарушения сна, влияющие на дыхание, характеризуются повторяющимися эпизодами уменьшенного дыхания в процессе сна. Обструктивное апноэ сна (OSA), например, приводит к эпизодам прерывания потока воздуха, при этом каждый эпизод обычно длится 10 секунд или более. Эти прерывания поступления воздуха происходят, когда язык или другая мягкая ткань носовой части глотки и ротовой части глотки подвергаются воздействию потока воздуха через верхние дыхательные пути, а также низкому давлению, генерируемому дыхательным усилием пациента. У пациентов, страдающих OSA, такие эффекты проявляются относительно сильно и приводят к частичному или полному блокированию потока воздуха через верхние дыхательные пути. Эти блокировки приводят к снижению поступления кислорода в кровь, что, в конечном счете, приводит к пробуждению пациента, после чего нормальное дыхание возобновляется. Обычно после того как пациент снова засыпает, процесс блокирования дыхательных путей и пробуждений повторяется. Такие повторы часто периодически продолжаются на протяжении всего сна, в некоторых случаях со средней частотой 60 или более эпизодов в час во время сна, что приводит к разрушительному воздействию на здоровье и самочувствие пациента.
В одном семействе технологий, разработанных для лечения апноэ сна, используются компрессоры и лицевые маски для поддержания дыхательного давления пациента с помощью положительного непрерывного давления в дыхательных путях (СРАР) в процессе сна. Такие технологии обычно реализуются с использованием устройств, известных как СРАР-аппараты. Хотя СРАР-аппараты высоко эффективны при лечении апноэ сна, они обременительны для пациента, требуя от пациентов носить маску СРАР-аппарата в течение всего сна. Кроме того, подвижность пациента в процессе сна ограничена шлангом, соединяющим СРАР-маску с компрессором. Помимо этого, положительное давление воздуха в верхних дыхательных путях создает большие неудобства и часто вызывает симптомы, подобные гриппу, и другие побочные эффекты.
В настоящее время разрабатываются альтернативные технологии, в основе которых лежат устройства, имплантируемые хирургическим путем в ткань в полости рта пациента, чтобы уменьшить эффекты, вызывающие эпизоды апноэ. Однако данные технологии далеки от использования в промышленных объемах и могут создавать проблемы гигиенического характера. Технологии, не связанные с хирургическим вмешательством, основаны на введении кап, которые перемещают нижнюю челюсть вперед, тем самым открывая дыхательные пути позади языка, однако эти устройства не обладают высокой эффективностью. Были испробованы другие внутриротовые устройства, в которых используются размещенные на постоянной основе стенты или выступы для удерживания языка, чтобы устранить препятствия в верхних дыхательных путях, но они не имели коммерческого успеха, поскольку такие стенты оказывали отрицательное физиологическое влияние на пациента вследствие того, что введение размещаемого стента в полость рта вызывает рвотный рефлекс и создает общий дискомфорт. Такие отрицательные физиологические эффекты могут усугубляться, поскольку пациенты начинают опасаться вводить в рот устройства, которые вызовут рвотный рефлекс.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем изобретении предложено внутриротовое устройство для обеспечения поддержки верхних дыхательных путей с целью устранения препятствий дыханию.
Согласно идеям одного варианта осуществления настоящего изобретения предложено устройство для уменьшения затруднений дыхания пользователя, при этом устройство содержит: базовый элемент для соединения с возможностью снятия с верхней или нижней челюстью пользователя; упругий опорный элемент, функционально связанный с базовым элементом, при этом упругий опорный элемент включает в себя по меньшей мере одну контактную поверхность для соприкосновения по меньшей мере с одной областью ткани, при этом упругий опорный элемент выполнен с возможностью перемещения между отведенным положением, в котором по меньшей мере одна контактная поверхность пространственно отделена по меньшей мере от одной области ткани, и развернутым положением, в котором по меньшей мере участок упругого опорного элемента выдвинут, так что по меньшей мере одна контактная поверхность соприкасается по меньшей мере с одной областью ткани, чтобы предотвратить по меньшей мере частичный коллапс по меньшей мере части верхних дыхательных путей; электромеханическое приводное устройство, связанное с возможностью механического управления с упругим опорным элементом; а также блок управления, связанный с электромеханическим приводным устройством, при этом блок управления выполнен с возможностью приведения в действие электромеханического приводного устройства для перемещения упругого опорного элемента между отведенным и развернутым положениями.
В качестве опции, когда упругий опорный элемент находится в отведенном положении, он принимает начальный объем, а когда упругий опорный элемент находится в развернутом положении, он выполнен с возможностью принятия диапазона объемов между начальным развернутым объемом и максимальным развернутым объемом, причем начальный объем составляет приблизительно менее 10% от максимального развернутого объема.
В качестве опции, когда упругий опорный элемент находится в отведенном положении, он принимает начальную длину, а когда упругий опорный элемент находится в развернутом положении, он выполнен с возможностью принятия диапазона длин между начальной развернутой длиной и максимальной развернутой длиной.
В качестве опции, когда упругий опорный элемент находится в отведенном положении, по существу преобладающая часть упругого опорного элемента удерживается в сжатом состоянии в полости рта пользователя.
В качестве опции скорость перемещения по меньшей мере участка упругого опорного элемента в процессе перемещения из отведенного положения в развернутое положение лежит в диапазоне 0,5-20 миллиметров в минуту.
В качестве опции перемещение из отведенного положения в развернутое положение вызывается вращением упругого опорного элемента вокруг продольной оси упругого опорного элемента.
В качестве опции упругий опорный элемент включает в себя цилиндрическую винтовую пружину.
В качестве опции цилиндрическая винтовая пружина включает в себя множество витков, при этом расстояние между каждым витком лежит в диапазоне 4-15 миллиметров.
В качестве опции цилиндрическая винтовая пружина имеет диаметр поперечного сечения в плоскости, перпендикулярной продольной оси цилиндрической винтовой пружины, в диапазоне 5-20 миллиметров.
В качестве опции упругий опорный элемент дополнительно содержит покрытие из материала с низким коэффициентом трения для покрытия цилиндрической винтовой пружины.
В качестве опции покрытие имеет толщину в диапазоне 50-300 микрон.
В качестве опции по меньшей мере одна область ткани включает в себя множество областей ткани, при этом вслед за перемещением упругого опорного элемента в развернутое положение упругий опорный элемент способно продолжать непрерывно перемещаться для изменения положения по меньшей мере одной контактной поверхности для соприкосновения с любой из множества областей ткани.
В качестве опции непрерывное перемещение вызывается вращением вокруг продольной оси упругого опорного элемента со скоростью в диапазоне 0,1-1 поворотов в минуту.
В качестве опции электромеханическое приводное устройство включает в себя цилиндрическое устройство, содержащее внутренний цилиндр, имеющий наружную поверхность, а также полый внешний цилиндр, имеющий внутреннюю поверхность, ограничивающую внутренний объем, при этом по меньшей мере участок внутреннего цилиндра расположен во внутреннем объеме полого внешнего цилиндра, тем самым образуя кольцевой объем между наружной поверхностью внутреннего цилиндра и внутренней поверхностью полого внешнего цилиндра.
В качестве опции по существу преобладающая часть упругого опорного элемента удерживается в кольцевом объеме, когда упругий опорный элемент находится в отведенном положении.
В качестве опции внутренний цилиндр представляет собой полый цилиндр, дополнительно имеющий внутреннюю поверхность, ограничивающую внутренний объем для удерживания по меньшей мере участка компонента устройства, выбираемого из группы, состоящей из двигателя для управления электромеханическим приводным устройством, блока управления, а также одного или нескольких датчиков, связанных с блоком управления.
В качестве опции устройство дополнительно содержит один или несколько датчиков, связанных с блоком управления, при этом один или несколько датчиков выбираются из группы, состоящей из датчика давления, датчика температуры, датчика влажности, датчика кровяного давления, акустического датчика, датчика вибраций, датчика контакта с тканью, оптического периферийного датчика насыщения капиллярной крови кислородом (optical peripheral capillary oxygen saturation sensor), электромиографического датчика, датчика силы, а также датчика целостности упругого опорного элемента.
В качестве опции каждый из датчиков выполнен с возможностью подачи сигналов в блок управления, при этом блок управления выполнен с возможностью приведения в действие или воздержания от приведения в действие электромеханического приводного устройства для перемещения упругого опорного элемента согласно по меньшей мере одному правилу.
В качестве опции это по меньшей мере одно правило выбирается из группы, состоящей из перемещения упругого опорного элемента в развернутое положение, если пользователь испытывает дыхательную недостаточность, перемещения упругого опорного элемента в развернутое положение, если пользователь спит, перемещения упругого опорного элемента в развернутое положение по истечении заданного периода времени, перемещения упругого опорного элемента в отведенное положение по истечении заданного периода времени, воздержания от перемещения упругого опорного элемента в развернутое положение, если пользователь проснулся, воздержания от перемещения упругого опорного элемента в развернутое положение, если пользователь не испытывает дыхательной недостаточности, воздержания от перемещения упругого опорного элемента, если целостность упругого опорного элемента нарушена.
В качестве опции устройство дополнительно содержит источник питания, выполненный с возможностью подачи питания по меньшей мере на электромеханическое приводное устройство или блок управления.
В качестве опции источник питания представляет собой перезаряжаемый источник питания.
В качестве опции устройство дополнительно содержит зарядное устройство, выполненное с возможностью вступления в функциональное взаимодействие с перезаряжаемым источником питания.
В качестве опции базовый элемент включает в себя по существу дугообразную периметрическую поверхность, содержащую первую и вторую ветви.
В качестве опции базовый элемент дополнительно включает в себя полоску, имеющую первый и второй концы, при этом первый конец жестко соединен с первой ветвью, а второй конец жестко соединен со второй ветвью, так что полоска продолжается латерально поперек базового элемента, при этом упругий опорный элемент жестко соединен по меньшей мере с участком полоски.
В качестве опции упругий опорный элемент, электромеханическое приводное устройство, а также блок управления удерживаются в едином корпусе.
В качестве опции единый корпус удерживается в полости рта пользователя, когда базовый элемент соединен с верхней или нижней челюстью пользователя.
В качестве опции область ткани включает в себя по меньшей мере участок глотки.
В качестве опции, когда упругий опорный элемент находится в развернутом положении, он создает профиль силы, прикладываемой к области ткани, который содержит радиальную компоненту силы.
В качестве опции базовый элемент включает в себя множество крепежных звеньев, при этом каждое соответствующее крепежное звено предназначено для крепления с возможностью снятия к соответствующему зубу или паре зубов пользователя.
В качестве опции каждое из крепежных звеньев включает в себя отлитую форму соответствующего зуба или пары зубов.
Согласно идеям одного варианта осуществления настоящего изобретения предложено также устройство для уменьшения затруднений дыхания пользователя, при этом устройство содержит: базовый элемент для соединения с возможностью снятия с верхней или нижней челюстью пользователя; упругий опорный элемент, функционально связанный с базовым элементом, при этом упругий опорный элемент включает в себя по меньшей мере одну контактную поверхность для соприкосновения с областью ткани, при этом упругий опорный элемент выполнен с возможностью принятия диапазона объемов между начальным объемом, при котором по меньшей мере одна контактная поверхность пространственно отделена от области ткани, и вторым объемом, при котором по меньшей мере участок упругого опорного элемента выдвинут, так что по меньшей мере одна контактная поверхность соприкасается с областью ткани, при этом упругий опорный элемент создает профиль силы, прикладываемой к области ткани, чтобы предотвратить по меньшей мере частичный коллапс по меньшей мере части верхних дыхательных путей, при этом начальный объем составляет по меньшей мере половину второго объема; электромеханическое приводное устройство, связанное с возможностью механического управления с упругим опорным элементом; а также блок управления, связанный с электромеханическим приводным устройством, при этом блок управления выполнен с возможностью приведения в действие электромеханического приводного устройства для регулировки объема упругого опорного элемента.
Согласно идеям одного варианта осуществления настоящего изобретения предложено также устройство для уменьшения затруднений дыхания пользователя, при этом устройство содержит: базовый элемент для соединения с возможностью снятия с верхней или нижней челюстью пользователя; упругий опорный элемент, функционально связанный с базовым элементом, при этом упругий опорный элемент включает в себя по меньшей мере одну контактную поверхность для соприкосновения с областью ткани, при этом упругий опорный элемент выполнен с возможностью принятия диапазона длин между начальной длиной, при которой по меньшей мере одна контактная поверхность пространственно отделена от области ткани, и второй длиной, при которой по меньшей мере участок упругого опорного элемента выдвинут, так что по меньшей мере одна контактная поверхность соприкасается с областью ткани, при этом упругий опорный элемент создает профиль силы, прикладываемой к области ткани, чтобы предотвратить по меньшей мере частичный коллапс по меньшей мере части верхних дыхательных путей; электромеханическое приводное устройство, связанное с возможностью механического управления с упругим опорным элементом; а также блок управления, связанный сэлектромеханическим приводным устройством, при этом блок управления выполнен с возможностью приведения в действие электромеханического приводного устройства для регулировки длины упругого опорного элемента.
Если в настоящем описании не указано иное, все используемые здесь технические и/или научные термины имеют такое же смысловое значение, которое хорошо понятно среднему специалисту в области техники, к которой относится изобретение. Ниже описаны примеры способов и/или материалов, хотя при практической реализации или тестировании вариантов осуществления изобретения могут использоваться способы и материалы, схожие или эквивалентные тем, которые представлены в настоящем описании. В случае расхождений приоритет имеет патентное описание, включая все определения. Кроме того, материалы, способы и примеры носят лишь иллюстративный, но не ограничительный характер.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые варианты осуществления настоящего изобретения приведены в настоящем описании лишь в качестве примера со ссылкой на сопроводительные чертежи. Ссылаясь на конкретные чертежи, следует подчеркнуть, что представленные подробности приведены в качестве примера с целью наглядного пояснения вариантов осуществления изобретения. В этом смысле из описания совместно с чертежами специалистам в данной области техники станет очевидно, как варианты осуществления изобретения могут быть воплощены на практике.
Далее внимание обращается на чертежи, на которых одинаковые ссылочные позиции или знаки обозначают аналогичные или одинаковые компоненты. На чертежах
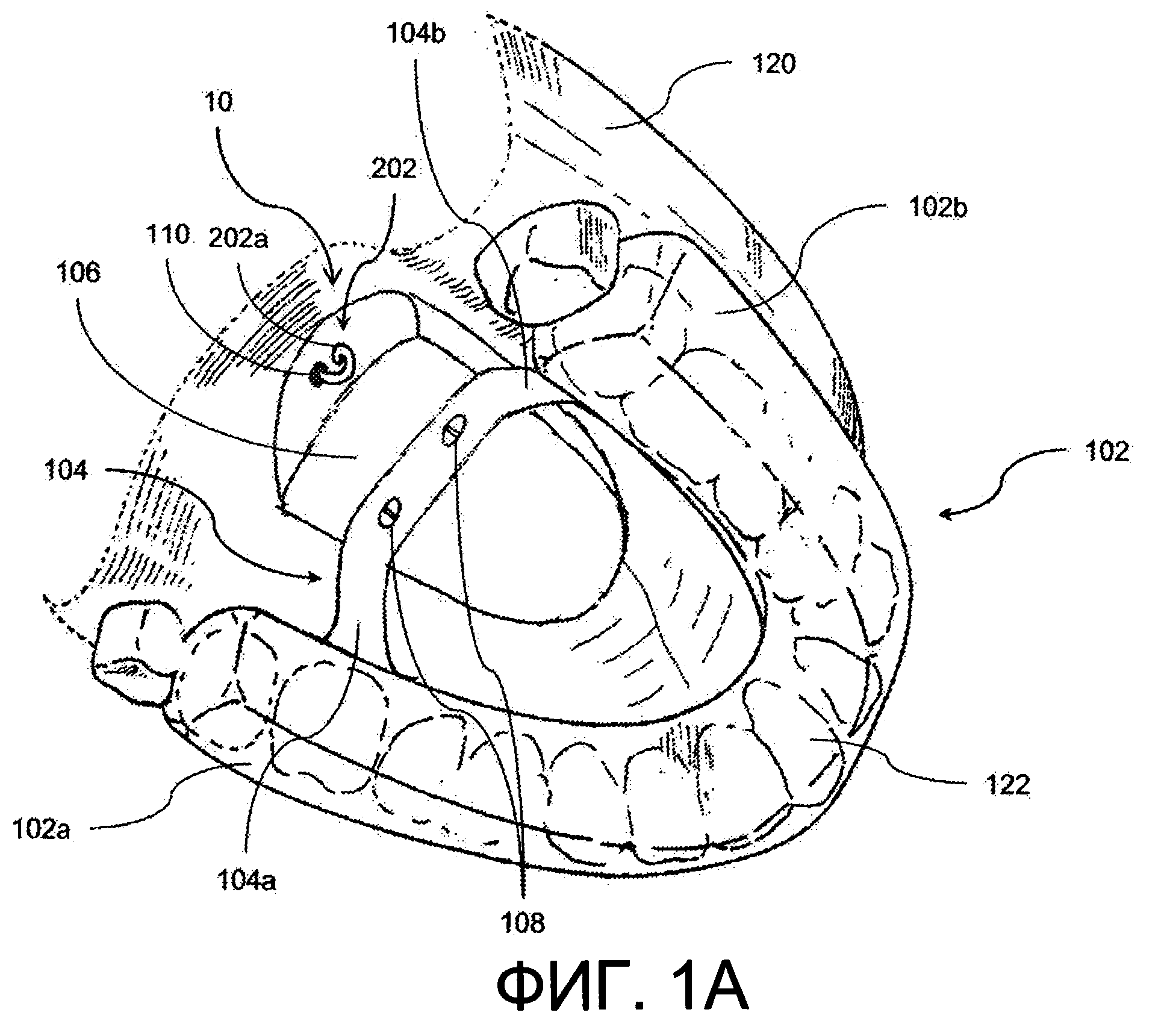
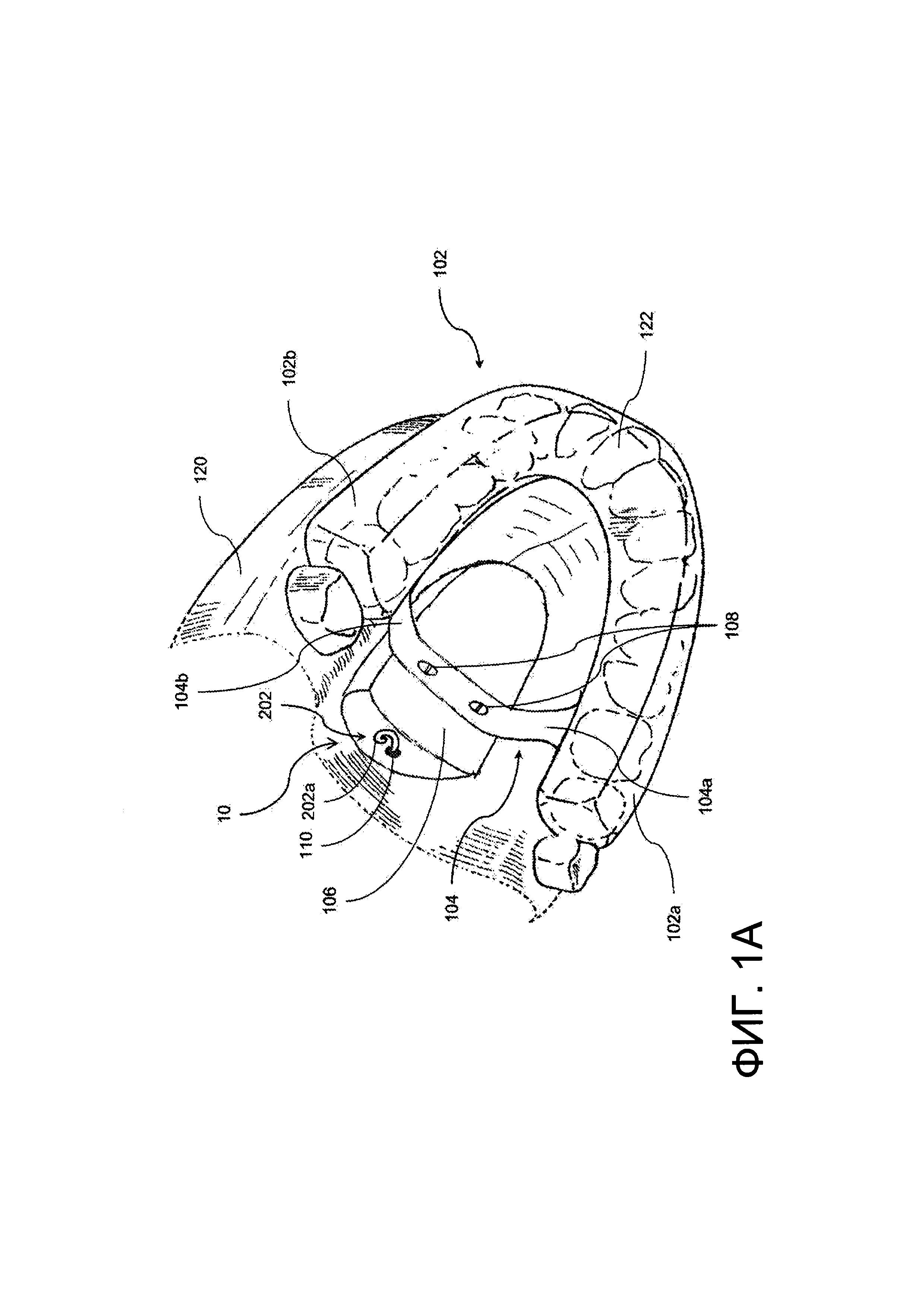
ФИГ. 1А - вид в изометрии, иллюстрирующий схематичное представление внутриротового устройства, прикрепленного к верхней челюсти пользователя, согласно одному варианту осуществления изобретения, где упругий опорный элемент находится в отведенном положении;
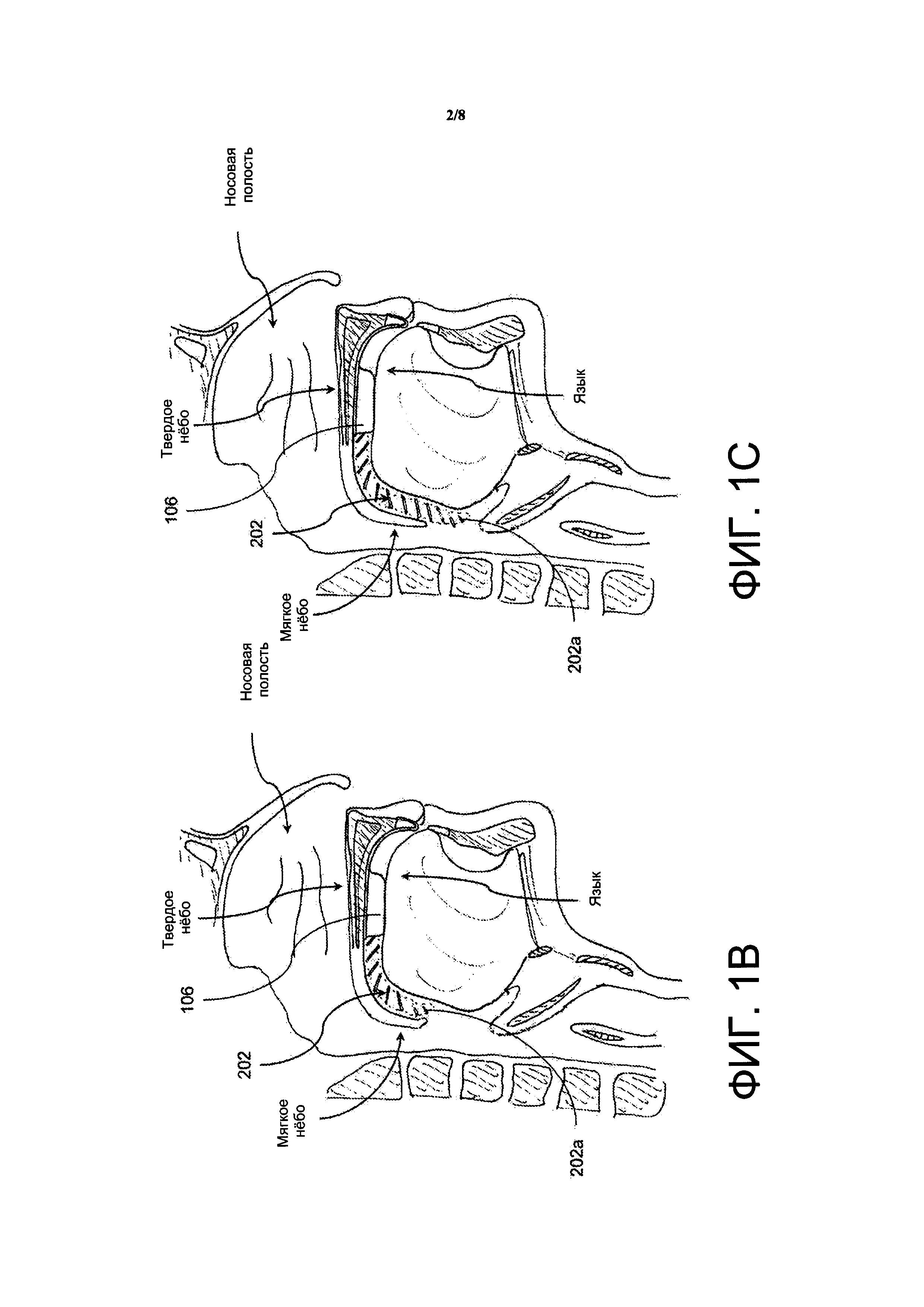
ФИГ. 1В и 1С - виды сбоку, иллюстрирующие схематичные представления внутриротового устройства, прикрепленного к верхней челюсти пользователя, согласно одному варианту осуществления изобретения, где упругий опорный элемент находится в развернутом положении при начальной развернутой длине и максимальной развернутой длине соответственно;
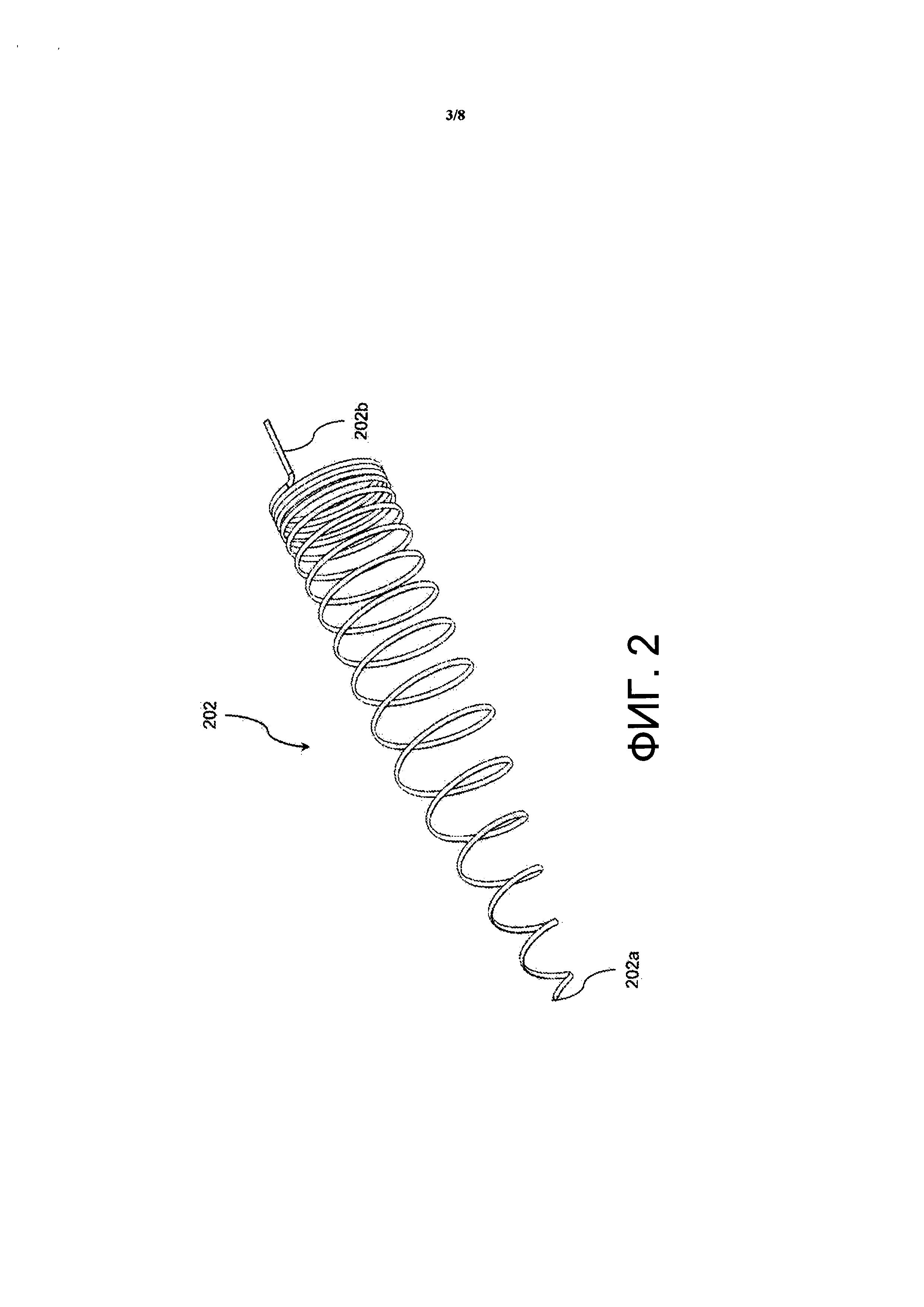
ФИГ. 2 - вид в перспективе одного варианта реализации упругого опорного элемента в виде цилиндрической винтовой пружины согласно одному варианту осуществления изобретения;
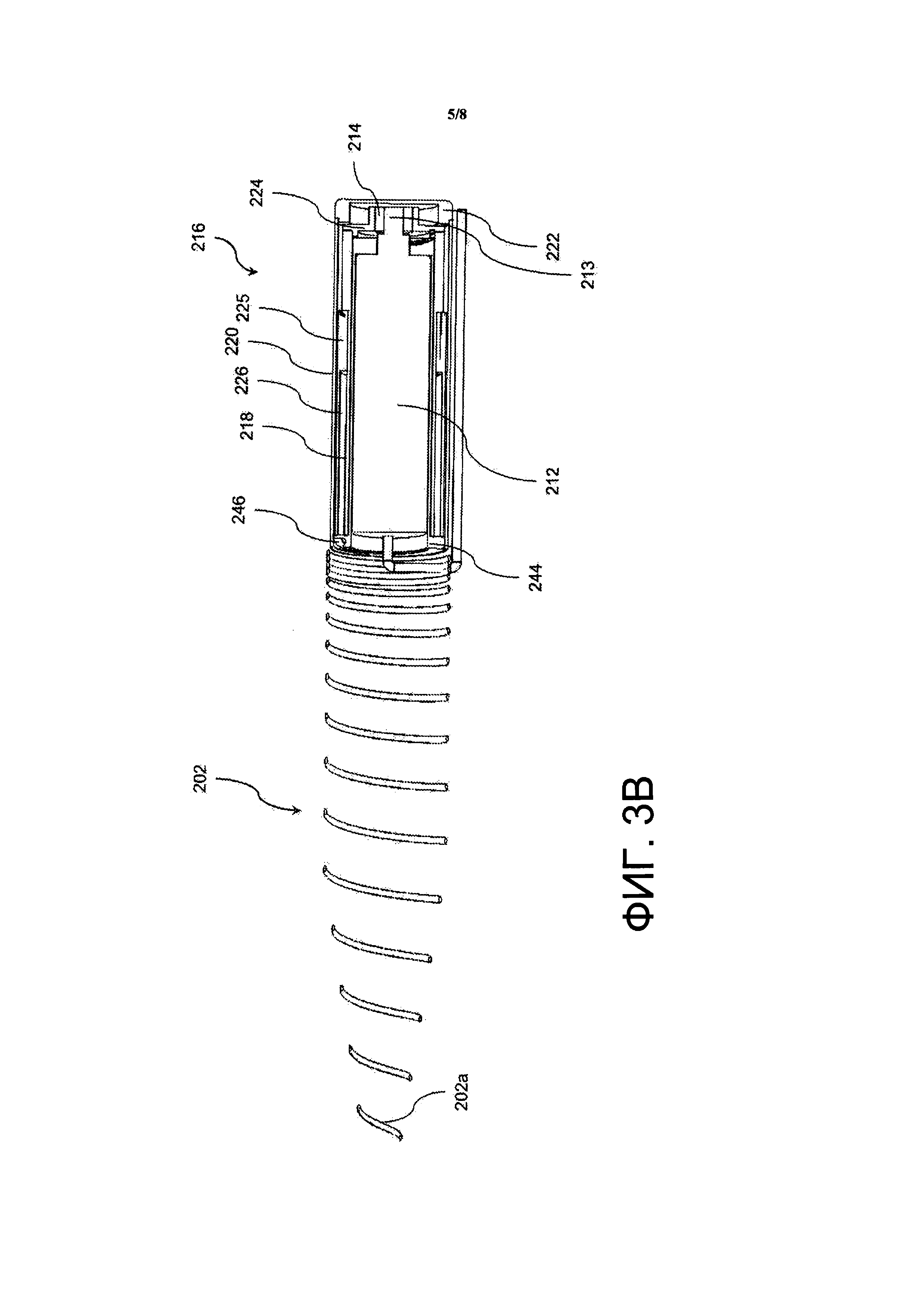
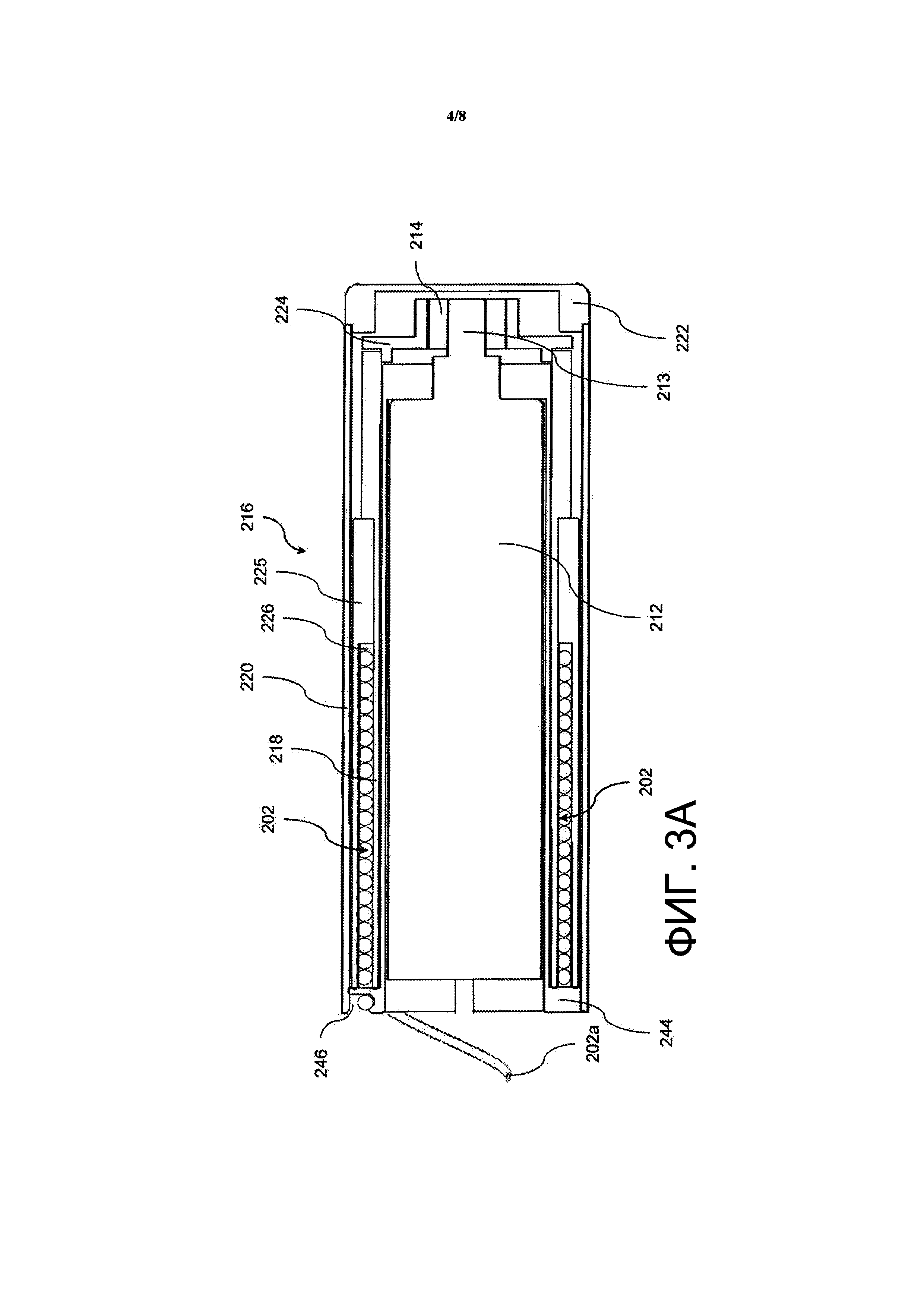
ФИГ. 3А и 3В - виды в разрезе электромеханического узла внутриротового устройства согласно одному варианту осуществления изобретения, где упругий опорный элемент находится в отведенном положении и развернутом положении при максимальной развернутой длине соответственно;
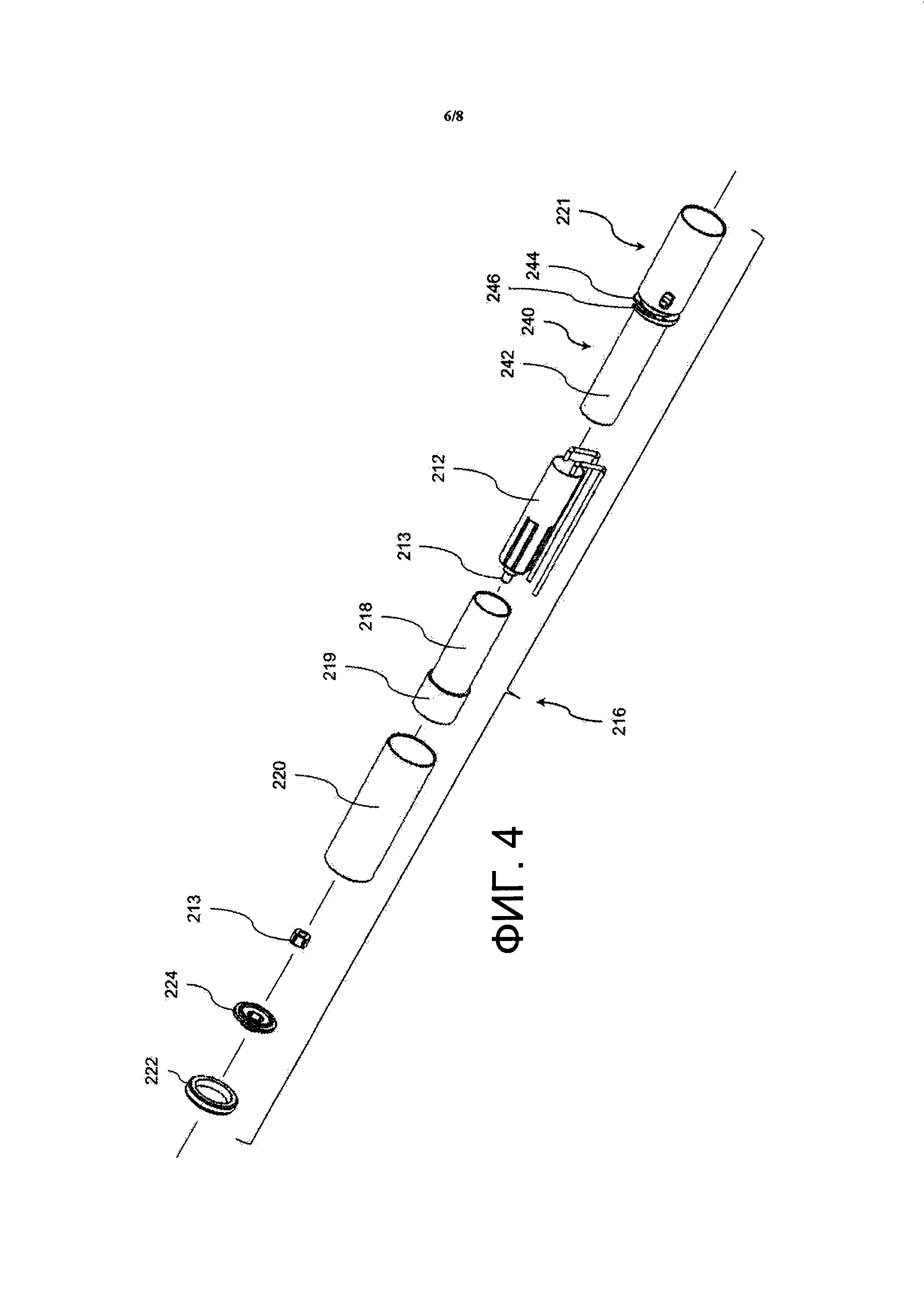
ФИГ. 4 - покомпонентный вид в изометрии некоторых элементов электромеханического узла согласно одному варианту осуществления изобретения;
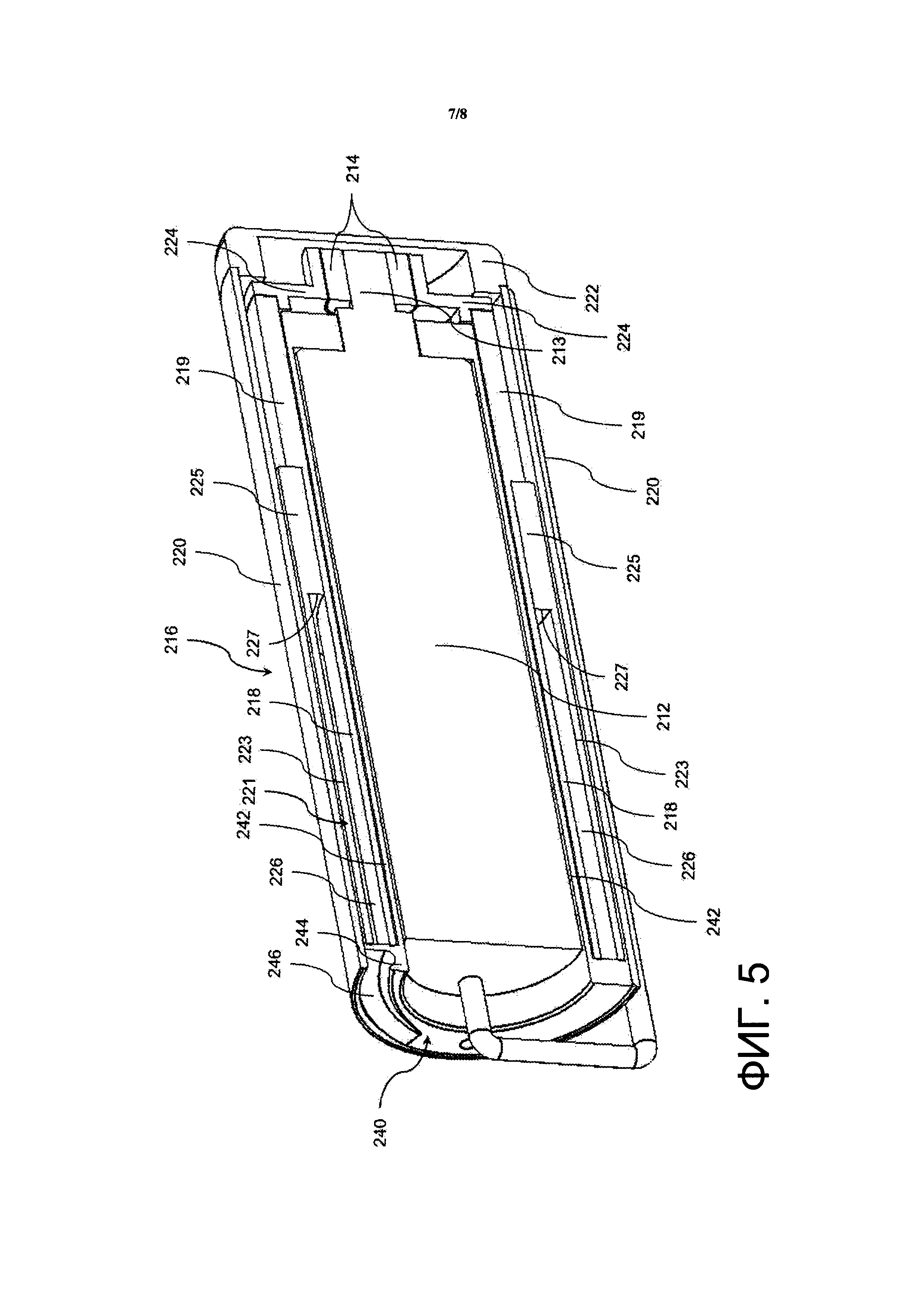
ФИГ. 5 - вид в разрезе в изометрии некоторых элементов электромеханического узла согласно одному варианту осуществления изобретения;
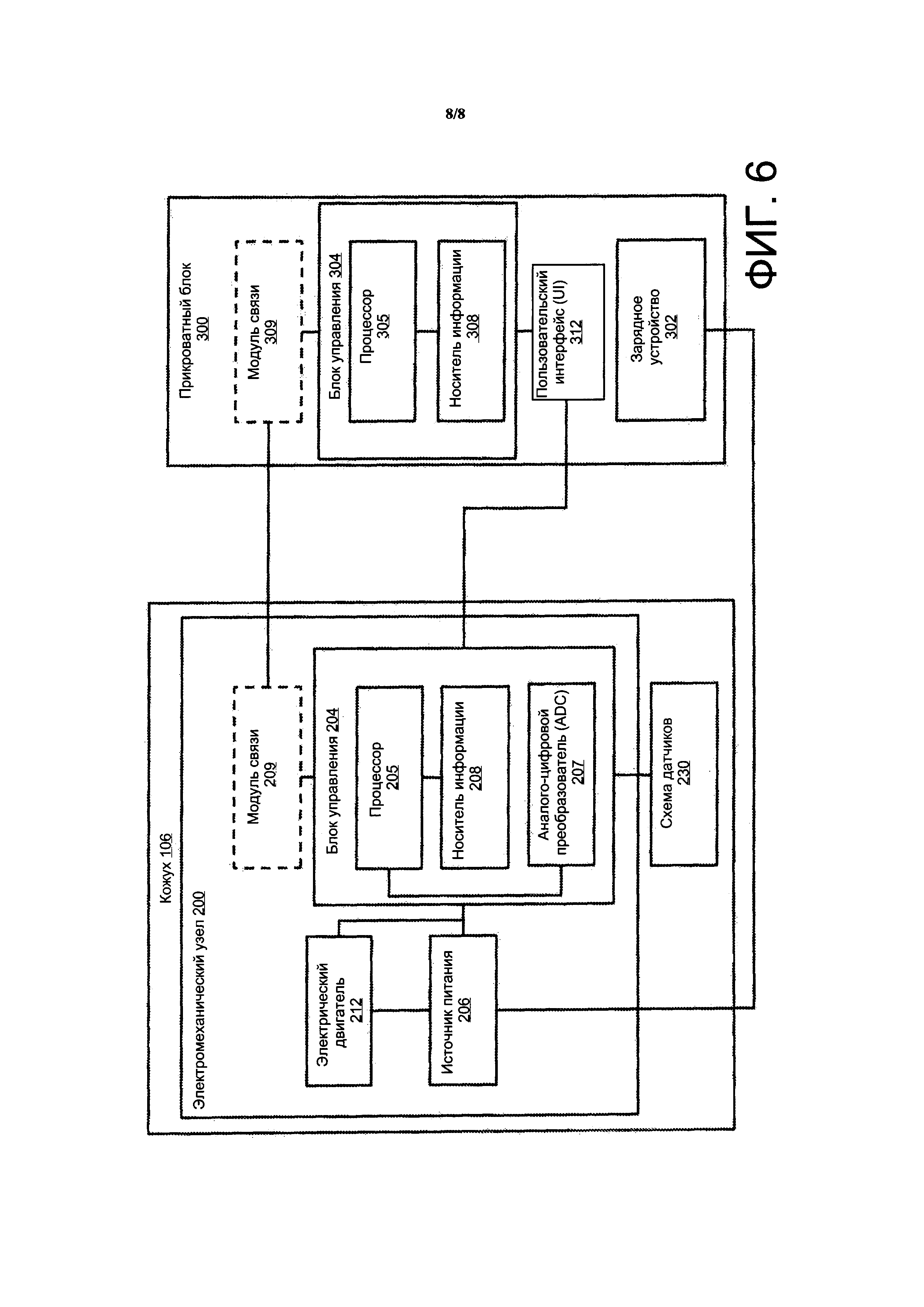
ФИГ. 6 - блок-схема некоторых элементов электромеханического узла и прикроватного блока для соединения с возможностью отсоединения с внутриротовым устройством согласно одному варианту осуществления изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Настоящее изобретение - внутриротовое устройство для обеспечения поддержки верхних дыхательных путей с целью устранения препятствий дыханию.
Принципы создания и работу внутриротового устройства согласно настоящему изобретению можно лучше понять, обратившись к чертежам и сопроводительному описанию.
Прежде чем подробно пояснить по меньшей мере один вариант осуществления изобретения, следует отметить, что применение изобретения не обязательно ограничено деталями конструкции и расположением компонентов и/или способами, изложенными в нижеследующем описании, и/или проиллюстрированными на чертежах, и/или в примерах. Изобретение может иметь другие варианты осуществления или воплощаться на практике либо реализовываться различными способами. Сначала в настоящем документе приводятся ссылки на направления, например, верхний и нижний, проксимальный и дистальный, вверх и вниз, по часовой стрелке и против часовой стрелки, правый, левый и т.п.Эти ссылки, относящиеся к направлению, приведены лишь в качестве примера для иллюстрации изобретения и его вариантов осуществления. Термины "проксимальный" и "дистальный" используются в их обычном смысле, относясь к участкам внутриротового устройства, расположенным соответственно ближе или дальше от губ пользователя в процессе использования внутриротового устройства.
Со ссылкой на ФИГ. 1А-1С, на которых показан вариант осуществления внутриротового устройства 10, закрепленного в полости рта пользователя. Полость рта пользователя содержит верхнюю челюсть 120, несущую на себе ряд зубов 122, которые, например, могут представлять собой естественные зубы пользователя, зубы, хирургически имплантированные в челюсть 120, либо съемные протезы. Внутриротовое устройство 10 включает в себя базовый элемент 102 для крепления к зубам 122 пользователя, полоску 104, соединенную с базовым элементом 102, а также непроницаемый для влаги кожух 106, соединенный с полоской 104 для размещения электромеханического узла 200, который обеспечивает поддержку верхних дыхательных путей пользователя. В контексте данного документа термин "верхние дыхательные пути", в общем, относится к отрезку дыхательных путей, который включает в себя части глотки, такие как ротовая часть глотки и носовая часть глотки, а также может включать в себя нос и носовые проходы, околоносовые пазухи, а также участки гортани над голосовыми связками. Хотя внутриротовое устройство 10 изображено прикрепленным к зубам на верхней челюсти пользователя, среднему специалисту в данной области техники следует понимать, что внутриротовое устройство 10 может быть аналогичным образом разработано и изготовлено для крепления к зубам на нижней челюсти пользователя.
В одном неограничивающем варианте реализации базовый элемент 102 выполнен из полученной на основе акрила дугообразной отлитой формы зубов 122 пользователя. Базовый элемент 102 может быть разработан на основе общепринятых стандартов конструирования в медицинской и стоматологической отраслях для внутриротовых устройств, например, устройств для выравнивания зубов, устройств для лечения бруксизма или устройств для выдвижения нижней челюсти вперед. Базовый элемент 102 предпочтительно изготавливается из твердого пластика, но также может изготавливаться из любого другого пригодного материала для внутриротового использования, в том числе, но не ограничиваясь перечисленным, материалов на основе металла и т.п. В таком неограничивающем варианте реализации базовый элемент 102 изготавливается так, чтобы соответствовать элементам полости рта пользователя по размеру и форме, и включает в себя крепежные механизмы, например, шариковые фиксаторы или акриловые стоматологические формы-слепки с вакуумной плотной посадкой (vacuum based tight fitting acrylic dental impression molds) для крепления к зубам 122. Таким образом, базовый элемент 102 может легко закрепляться и сниматься в полости рта пользователя. Базовый элемент 102 дополнительно может быть выполнен так, что рот пользователя остается приоткрытым, когда базовый элемент 102 крепится к зубам 122, предоставляя больше места в полости рта для размещения кожуха 106 и электромеханического узла 200. В контексте данного документа термин "полость рта", в общем, относится к участкам рта, включающим в себя внутреннюю выстилку губ, слизистую оболочку щек, зубы и десна, преобладающую часть языка, дно ротовой полости под языком, твердое небо, участки мягкого неба, а также ротовую часть глотки, которая, в общем, включает в себя ткань мягкого неба и дистальные участки языка.
Полоска 104 содержит два конца, а именно первый конец 104а и второй конец 104b, и продолжается латерально слева направо поперек базового элемента 102. В неограничивающем варианте реализации базового элемента 102 в виде дугообразной отлитой формы базовый элемент 102 содержит две ветви, а именно первую ветвь 102а и вторую ветвь 102b. Каждая ветвь продолжается вдоль дугообразного периметра базового элемента 102 в направлении мест расположения соответствующих больших коренных зубов на верхней челюсти 120 и включает в себя крепежные механизмы для крепления к зубам 122 на верхней челюсти 120. Каждый из крепежных механизмов выполнен с возможностью крепления к соответствующему зубу или паре зубов на верхней челюсти 120. Полоска 104 крепится к базовому элементу 102 путем соединения первого конца 104а с первой ветвью 104а и соединения второго конца 104b со второй ветвью 102b. Базовый элемент 102 и полоска 104 могут быть выполнены в виде единого тела или могут быть образованы из отдельных тел и соединены с использованием любой пригодной технологии, в том числе, но не ограничиваясь перечисленным, технологий склеивания или эпоксидного соединения.
Полоска 104 предпочтительно имеет дугообразную форму и образует арку, выступающую вверх в направлении твердого неба пользователя. Между твердым небом и участком полоски 104, ближайшим по расстоянию к твердому небу, сохраняется расстояние приблизительно 8 миллиметров, чтобы позволить установить кожух 106. В вариантах осуществления, в которых базовый элемент 102 крепится к зубам на нижней челюсти, арка полоски 104 выступает вверх в большей степени, чтобы свести к минимуму контакт между полоской 104 и языком. Кожух 106 соединен с полоской 104 посредством металлических винтов 108, головки которых показаны на ФИГ. 1А. Металлические винты 108 могут также служить в качестве электрических контактов для зарядки электрических компонентов электромеханического узла 200, расположенного в кожухе 106, не нарушая влагоизоляцию кожуха 106. Хотя на ФИГ. 1А изображены два металлических винта 108, для крепления кожуха 106 к полоске 104 может использоваться более двух таких металлических винтов. Следует отметить, что для соединения кожуха 106 с полоской 104 могут использоваться альтернативные технологии крепления, в том числе, но не ограничиваясь перечисленным, технологии склеивания или эпоксидного соединения.
Следует отметить, что в качестве альтернативы пространство между ветвями 102а и 102b может быть заполнено слоем или слоями материала, например, твердого пластика или схожего материала. Таким образом, кожух 106 может непосредственно крепиться к слою материала между ветвями 102а и 102b, не прибегая к необходимости использовать полоску 104 для крепления кожуха 106 к базовому элементу 102.
Кожух 106 предпочтительно изготовлен так, что его наружная поверхность покрыта или образована биосовместимым материалом, пригодным для продолжительного внутриротового использования, например, акриловыми смолами, широко используемыми в медицинской и стоматологической отраслях. Кроме того, края кожуха 106 предпочтительно закруглены и являются гладкими, чтобы уменьшить дискомфорт и не допустить повреждения ткани и мышц в полости рта, например языка, десен, твердого неба и участков мягкого неба. Кожух 106 может изготавливаться так, чтобы соответствовать небу пользователя по размеру и форме, чтобы верхняя поверхность кожуха 106 была согласована с общей кривизной твердого неба. Кроме того, кожух 106 предпочтительно занимает достаточно малый объем, так что внутриротовое устройство 10 не создает дискомфорта пользователю. Соответственно кожух предпочтительно имеет длину приблизительно 25 миллиметров, ширину 15 миллиметров и высоту 8 миллиметров. Такие размеры позволяют внутриротовому устройству 10, в частности кожуху 106, комфортно располагаться между твердым небом и языком пользователя, будучи вставленным в рот.
Как упоминалось выше, в кожухе 106 размещается электромеханический узел 200, который обеспечивает поддержку верхних дыхательных путей пользователя и устраняет препятствия дыханию, такие как возникают при OSA.
Со ссылкой на ФИГ. 3А-6, на которых показаны детали элементов электромеханического узла 200. При описании элементов электромеханического узла 200 также приводятся ссылки на элементы, показанные на ФИГ. 1А-1С. Электромеханический узел 200 включает в себя упругий опорный элемент 202, действующий в качестве отводимого назад и развертываемого стента для размещения в верхних дыхательных путях, электромеханическое приводное устройство 210 для отведения и развертывания упругого опорного элемента 202, блок 204 управления для приведения в действие электромеханического приводного устройства 210, а также источник 206 питания. Упругий опорный элемент 202 может быть выполнен с возможностью замены, предоставляя пользователю возможность замены упругого опорного элемента 202 после продолжительного использования. Это служит формой профилактического обслуживания, снижая риск неисправной работы упругого опорного элемента 202 после продолжительных периодов использования.
Упругий опорный элемент 202 способен перемещаться между двумя положениями, а именно отведенным положением (ФИГ. 1А и 3А) и развернутым положением (ФИГ. 1В, 1С и 3В). Как будет дополнительно подробнее описано ниже, электромеханическое приводное устройство 210 подает питание и создает механический привод на основе управляющих входных сигналов, поступающих из блока 204 управления, для перемещения упругого опорного элемента 202 между этими двумя положениями.
Как показано на ФИГ. 6, блок 204 управления включает в себя по меньшей мере один процессор 205, соединенный с носителем 208 информации, таким как запоминающее устройство и т.п. Процессор 205 также предпочтительно соединен с модулем 207 аналого-цифрового преобразования (ADC) для приема аналогового входного сигнала и выдачи оцифрованного выходного сигнала в процессор 205. Процессор 205 может представлять собой любое число процессоров компьютера, в том числе, но не ограничиваясь перечисленным, микроконтроллер, микропроцессор, ASIC (специализированная интегральная схема), DSP (цифровой процессор сигналов), а также машину положений. Такие процессоры включают в себя или могут обмениваться информацией с машиночитаемыми носителями, хранящими программный код или наборы инструкций, которые при выполнении их процессором, заставляют процессор выполнять действия. В число видов машиночитаемых носителей входят, но не ограничиваясь перечисленным, электронные, оптические, магнитные или другие устройства хранения или передачи данных, способные снабжать процессор машиночитаемыми инструкциями.
Как показано на ФИГ. 1А и 3А, когда упругий опорный элемент 202 находится в отведенном положении, он 202 почти целиком заключено в кожух 106 и удерживается в нем, за исключением дистального конца 202а упругого опорного элемента 202 и участков упругого опорного элемента 202, расположенных проксимально относительно дистального конца 202а, которые незначительно выступают через отверстие 110 на дистальном конце кожуха 106. Длина, измеряемая вдоль продольной оси упругого опорного элемента 202, участков упругого опорного элемента 202, выступающих через отверстие 110 при пребывании в отведенном положении, лежит приблизительно в диапазоне 5-10 миллиметров. Кроме того, между областью касания ткани (т.е. участком стенок верхних дыхательных путей) и дистальным концом 202а предусмотрен специальный зазор в диапазоне приблизительно 5-15 миллиметров, когда базовый элемент 102 закреплен во рту пользователя и упругий опорный элемент 202 находится в отведенном положении. Таким образом, когда внутриротовое устройство 10 первоначально располагается во рту пользователя с отведенным упругим опорным элементом 202, ни один из участков упругого опорного элемента 202 не соприкасается с областями ткани в полости рта и/или верхних дыхательных путях, что могло бы вызвать рвотный рефлекс.
Хотя на ФИГ. 1А не показано, при пребывании в отведенном положении упругий опорный элемент 202 предпочтительно почти целиком заключено и удерживается в корпусе, который постоянно целиком удерживается в кожухе 106. Такой корпус будет дополнительно подробнее описан ниже со ссылкой на неограничивающие примеры реализации упругого опорного элемента 202 и электромеханического приводного устройства 210.
Когда упругий опорный элемент 202 перемещается из отведенного положения в развернутое положение, упругий опорный элемент 202 увеличивается в длине, а в некоторых вариантах осуществления также увеличивается в диаметре и объеме, что связано с перемещением из кожуха 106 через отверстие 110. Отверстие 110 обычно уплотнено с помощью упругого кольцевого уплотнения, позволяющего упругому опорному элементу 202 перемещаться в кожух 106 и из него, не допуская при этом проникновения в кожух 106 излишнего количества влаги и соприкосновения с электронными и механическими компонентами, такими как источник 206 питания, блок 204 управления, а также компонентами электромеханического приводного устройства 210. В качестве альтернативы упругий опорный элемент 202 отводится и развертывается из отдельной камеры в кожухе 106, которая изолирована по текучей среде от камеры, удерживающей электронные и механические компоненты.
Как показано на ФИГ. 1В и 1С, когда упругий опорный элемент 202 находится в развернутом положении, дистальный конец 202а и/или другие участки упругого опорного элемента 202 соприкасаются с областями ткани в полости рта и/или верхних дыхательных путях пользователя, такими как ротовая часть глотки и носовая часть глотки, в частности участками ткани мягкого неба. Упругий опорный элемент 202 прикладывает радиальные силы к области касания ткани (т.е. стенкам верхних дыхательных путей), что не допускает коллапса дыхательных путей, вызванного весом окружающей ткани и уменьшением атмосферного давления в дыхательных путях. В результате упругий опорный элемент 202, когда он находится в развернутом положении, сохраняет целостность верхних дыхательных путей пользователя и не допускает полного или частичного коллапса верхних дыхательных путей вследствие OSA или схожих нарушений.
Следует отметить, что по мере того как упругий опорный элемент 202 удлиняется вследствие перемещения из отведенного положения в развернутое положение, упругий опорный элемент 202 изгибается в соответствии с кривизной мягкого неба, как показано на ФИГ. 1В и 1С. Следует также отметить, что упругий опорный элемент 202 по определению находится в развернутом положении, когда дистальный конец 202а и/или другие участки упругого опорного элемента 202 соприкасаются с вышеупомянутыми областями ткани, так что упругий опорный элемент 202 прикладывает надлежащие радиальные силы к этим областям ткани в полости рта и/или верхних дыхательных путях пользователя. Следовательно, длина упругого опорного элемента 202 может продолжать увеличиваться под воздействием электромеханического приводного устройства 210, приводимого в действие блоком 204 управления, пребывая в развернутом положении, пока не достигнет максимальной развернутой длины. Таким образом, упругий опорный элемент 202 может принимать диапазон длин, а именно от начальной развернутой длины до максимальной развернутой длины, пребывая в развернутом положении. Примеры упругого опорного элемента 202, принимающего начальную развернутую длину и максимальную развернутую длину, проиллюстрированы на ФИГ. 1В и 1С соответственно.
Следует отметить, что примеры длин, соответствующих начальной развернутой длине и максимальной развернутой длине, изображенным соответственно на ФИГ. 1В и 1С, носят сугубо иллюстративный характер, чтобы помочь лучше понять функциональное назначение компонентов внутриротового устройства 10, описанного в настоящем документе. Следует понимать, что на практике начальная развернутая длина может быть меньше или больше начальной развернутой длины, показанной на ФИГ. 1B, а максимальная развернутая длина может быть меньше или больше максимальной развернутой длины, показанной на ФИГ. 1С.
Следует также отметить, что упругий опорный элемент 202 по определению находится в отведенном положении, когда дистальный конец 202а и/или любые другие участки упругого опорного элемента 202 не допускают контакта с областью касания ткани в полости рта и/или верхних дыхательных путях пользователя, либо любыми другими областями ткани и/или мышц во рту и/или полости рта, и/или верхних дыхательных путей. Как упоминалось выше, дистальный конец 202а пространственно отделен от области касания ткани приблизительно на 5-15 миллиметров при пребывании в отведенном положении. Следовательно, длина упругого опорного элемента 202 может продолжать уменьшаться от длины, поддерживающей 5-миллиметровый пространственный зазор между дистальным концом 202а и областью касания ткани, до длины, поддерживающей 15-миллиметровый пространственный зазор, находясь по определению в отведенном положении.
Со ссылкой на ФИГ. 2, на которой показан один неограничивающий пример реализации упругого опорного элемента 202. В таком варианте реализации упругий опорный элемент 202 выполнен в виде цилиндрической винтовой пружины, имеющей, в общем, прямоугольную форму сечения с закругленными краями вдоль преобладающей части длины цилиндрической винтовой пружины 202. Перемещение цилиндрической винтовой пружины 202 между отведенным и развернутым положениями вызывается поворотом цилиндрической винтовой пружины 202 вокруг ее продольной оси. Для упрощения изображения в оставшейся части настоящего раскрытия компоненты внутриротового устройства 10 описываются со ссылкой на упругий опорный элемент 202, реализованный в виде цилиндрической винтовой пружины. Здесь следует отметить, что упругий опорный элемент 202 может иметь любую пригодную форму, способную создать опору и не допустить коллапса, как упоминалось выше, по-прежнему обеспечивая возможность отвода в кожух 106, например, представлять собой цилиндрическую конструкцию или пластинчатую конструкцию, при этом конструкция цилиндрической винтовой пружины упругого опорного элемента 202 не должна ограничивать функциональные возможности других компонентов внутриротового устройства 10 функциональными возможностями, описанными в отношении приведенного в качестве примера варианта реализации конструкции цилиндрической винтовой пружины.
Цилиндрическая винтовая пружина 202 выполнена из проволоки, например, проволоки из сплава Nitinol, которая навита для образования витков цилиндрической винтовой пружины 202. В контексте данного документа термин "виток" используется попеременно с термином "петля" и относится к отдельным кольцеобразным участкам пружины. Цилиндрическая винтовая пружина включает в себя проксимальный конец 202b и дистальный конец 202а, который предпочтительно выполнен в виде закругленного мягкого конца, чтобы не допустить повреждения мягкой ткани в полости рта и/или верхних дыхательных путях, когда упругий опорный элемент 202 перемещается между отведенным и развернутым положениями. Все витки вдоль большей части длины цилиндрической винтовой пружины имеют приблизительно равный диаметр. Согласно одному неограничивающему варианту реализации, показанному на ФИГ. 2, диаметр последних нескольких витков постепенно уменьшается вблизи дистального конца 202а, что приводит к образованию, в общем, закругленного конического сечения. В результате виток, ближайший к дистальному концу 202а, имеет наименьший диаметр среди всех витков цилиндрической винтовой пружины 202. Такой вариант реализации позволяет цилиндрической винтовой пружине 202 проходить через малые отверстия в полости рта и верхних дыхательных путях, например между языком и мягким небом.
Цилиндрическая винтовая пружина 202 предпочтительно содержит приблизительно 10-15 витков. Когда она находится в развернутом положении (т.е. когда пружина находится по меньшей мере частично в расслабленном положении), расстояние между смежными витками составляет приблизительно 4-15 миллиметр, более предпочтительно приблизительно 7-10 миллиметров. Следует отметить, что расстояние между парами смежных витков не обязательно должно быть одинаковым. Цилиндрическая винтовая пружина 202 имеет переменную длину в диапазоне приблизительно 40-150 миллиметров, более предпочтительно в диапазоне 40-120 миллиметров. Минимальная длина цилиндрической винтовой пружины 202 представляет собой длину пружинв при ее пребывании в отведенном положении (т.е. когда пружина полностью сжата). Аналогичным образом максимальная развернутая длина цилиндрической винтовой пружины 202 - максимальная длина пружины, когда она находится в развернутом положении. Таким образом, цилиндрическая винтовая пружина 202 может достигать длины в отведенном положении, которая может составлять приблизительно 5-15% максимальной развернутой длины. Кроме того, каждый виток цилиндрической винтовой пружины 202 предпочтительно имеет переменный диаметр в диапазоне приблизительно 5-15 миллиметров, более предпочтительно в диапазоне 5-10 миллиметров. Минимальный диаметр цилиндрической винтовой пружины 202 представляет собой диаметр пружины при пребывании в отведенном положении. Аналогичным образом максимальный развернутый диаметр цилиндрической винтовой пружины 202 - максимальный диаметр пружины, когда она находится в развернутом положении. Таким образом, цилиндрическая винтовая пружина 202 может достигать диаметра в отведенном положении, который составляет приблизительно 30% максимального развернутого диаметра. Благодаря способности к сокращению цилиндрической винтовой пружины 202 как по длине, так и по диаметру, цилиндрическая винтовая пружина 202 способна сокращаться по мере необходимости до малого объема, предпочтительно до объема, составляющего менее 10% от первоначального объема, наиболее предпочтительно до объема, составляющего менее 5% от первоначального объема.
Находясь в развернутом положении, цилиндрическая винтовая пружина 202 создает проход для воздуха вдоль продольной оси, имеющий свободную площадь сечения в любой точке вдоль длины пружины. Предпочтительно площадь сечения лежит в диапазоне 20-200 квадратных миллиметров, более предпочтительно в диапазоне 40-200 квадратных миллиметров. Как упоминалось выше, цилиндрическая винтовая пружина 202 способна сокращаться как по длине, так и по диаметру. Таким образом, цилиндрическая винтовая пружина 202 имеет переменную площадь сечения вдоль длины пружины. Предпочтительно цилиндрическая винтовая пружина 202 сохраняет по меньшей мере 50% максимальной площади сечения по всей длине цилиндрической винтовой пружины 202 в условиях действия равномерно распределенного тангенциального давления, составляющего по меньшей мере 0,3 фунта на квадратный дюйм (psi), но не более 0,5 psi. Следует отметить, что падения атмосферного давления в полости рта обычно вызваны потоком текучей среды, например вдыханием воздуха и проглатыванием слюны. Таким образом, вышеуказанные предпочтительные диапазоны площади сечения предназначены для выдерживания тангенциального давления, вызванного потоком текучей среды со скоростью приблизительно 4 литра в секунду.
Участок цилиндрической винтовой пружины 202, развертываемый из кожуха 106, увеличивается в длине, перемещаясь из отведенного положения в развернутое положение, со скоростью в диапазоне приблизительно 0,5-20 миллиметров в минуту. Относительно медленное развертывание предоставляет нервам в полости рта, конкретнее у основания языка, стимулирующим рвотный рефлекс, достаточно времени, чтобы «привыкнуть» к соприкосновению между цилиндрической винтовой пружиной 202 и тканью в полости рта и/или верхних дыхательных путях. Следовательно, цилиндрическая винтовая пружина 202, имеющая максимальную развернутую длину 100 миллиметров, может достичь полной длины по истечении 5-200 минут, при этом средний промежуток времени для достижения максимальной развернутой длины составляет приблизительно 30 минут.
Цилиндрическая винтовая пружина 202 предпочтительно имеет покрытие из материала с низким коэффициентом трения, пригодного для внутриротового использования, например, силикона, политетрафторэтилена (PTFE) и т.п. Покрытие из материала с низким коэффициентом трения предпочтительно имеет толщину в диапазоне приблизительно 50-300 микрон. Покрытие из материала с низким коэффициентом трения снижает коэффициент трения между цилиндрической винтовой пружиной 202 и областью касания ткани в полости рта пользователя, уменьшая риск эрозии и образования ран вследствие давления. Кроме того, в случае неисправности или повреждения цилиндрической винтовой пружины 202 в процессе использования покрытие сохраняет целостность цилиндрической винтовой пружины 202 и позволяет электромеханическому приводному устройству 210 отвести назад цилиндрическую винтовую пружину 202, либо позволяет пользователю извлечь внутриротовое устройство 10 изо рта, не оставляя обломков компонентов внутриротового устройства 10 в полости рта пользователя. Кроме того, покрытие из материала с низким коэффициентом трения уменьшает скорость образования налета и отложения других веществ на цилиндрической винтовой пружине 202 с течением времени.
Как упоминалось ранее, электромеханическое приводное устройство 210 подает питание и создает механический привод для перемещения цилиндрической винтовой пружины 202 между отведенным и развернутым положениями. Электромеханическое приводное устройство 210 предпочтительно включает в себя механизм 216 отвода и развертывания, электрический двигатель 212 для управления механизмом 216 отвода и развертывания, а также зубчатую передачу 214.
Электрический двигатель имеет достаточно малый размер, чтобы встраиваться в кожух 106, как описано выше. В рамках настоящего документа источники питания и устройства, работающие при напряжении, не превышающем 12 вольт постоянного тока (DC), называются "низковольтными", в то время как источники питания по меньшей мере 100 вольт переменного тока (АС) определяются как "сетевые источники питания". Если говорить конкретнее, сетевой источник питания в США обычно подает питание в диапазоне 100-120 вольт АС, в то время как сетевой источник питания в Европе обычно подает питание в диапазоне 220-240 вольт АС. Таким образом, предпочтительно электрический двигатель 212 представляет собой электрический двигатель постоянного тока (DC), принимающий входное напряжение постоянного тока, предпочтительно от источника 206 питания. В число примеров таких DC-электрических двигателей входят, но не ограничиваясь перечисленным, 3-вольтовые DC-электрические двигатели, например изготавливаемые компанией Marswell Engineering Ltd., Гонконг.
Источник 206 питания предпочтительно реализован в виде низковольтной перезаряжаемой батарейки с максимальным напряжением 12 вольт DC. В таком варианте реализации металлические винты 108 создают электрические контакты с перезаряжаемым источником 206 питания. Таким образом, зарядное устройство 302, соединенное с прикроватным блоком 300, соединенным с сетевым источником питания, может быть выполнено с возможностью перезарядки перезаряжаемого источника 206 питания посредством металлических винтов 108. В качестве альтернативы для перезарядки перезаряжаемого источника 206 питания может использоваться зарядный интерфейс, например, зарядные провода или другие подходящие электрические соединения. В качестве альтернативы источник 206 питания может представлять собой неперезаряжаемый источник питания (т.е. сменный источник питания), такой как одноразовая батарейка.
Электрический двигатель 212 управляет механизмом 216 отвода и развертывания посредством зубчатой передачи 214, расположенной на валу 213 электрического двигателя 212. Обычно электрические двигатели выдают номинально большое число оборотов в минуту (RPM) и малый крутящий момент на выходе. Соответственно зубчатая передача 214 преобразует большое число оборотов в минуту и малый выходной крутящий момент электрического двигателя 212 в малое RPM и высокий крутящий момент, необходимые для управления механизмом 216 отвода и развертывания с требуемой скоростью отвода и развертывания. На выходе зубчатой передачи 214 может располагаться датчик крутящего момента (не показан) для проверки надлежащего функционирования электромеханического приводного устройства 210.
Со ссылкой на ФИГ. 3А-5, на которых показан один неограничивающий пример реализации механизма 216 отвода и развертывания. В таком варианте реализации механизм 216 отвода и развертывания выполнен в виде цилиндрического устройства, которое управляет развертыванием цилиндрической винтовой пружины 202 и размещает в себе цилиндрическую винтовая пружина 202 при пребывании ее в отведенном положении. На ФИГ. 3А и 3В показаны виды в разрезе механизма 216 отвода и развертывания, когда цилиндрическая винтовая пружина 202 соответственно находится в отведенном и развернутом положении. Для упрощения изображения цилиндрическая винтовая пружина 202 не показана на ФИГ. 4 и 5.
Цилиндрическое устройство включает в себя полый внутренний цилиндр 218, полый внешний цилиндр 220, а также деблокировочную пластину 240 для направления отведения и развертывания цилиндрической винтовой пружины 202 из механизма 216 отвода и развертывания через отверстие 110. Предпочтительно полый внутренний цилиндр 218 имеет диаметр приблизительно 4,5 миллиметров, а полый внешний цилиндр имеет диаметр приблизительно 5,5 миллиметров.
Деблокировочная пластина 240 включает в себя, в общем, полую цилиндрическую часть 242, имеющую внутреннюю поверхность, ограничивающую внутренний объем, а также фланец 244 на дистальном конце деблокировочной пластины 240. Деблокировочная пластина 240 также включает в себя, в общем, криволинейный паз 246, продолжающийся частично через фланец 244, чтобы позволить цилиндрической винтовой пружине 202 проходить в цилиндрическое устройство и из него в процессе перемещения между отведенным и развернутым положениями.
Каждый из цилиндров 218 и 220 имеет соответствующую внутреннюю и наружную поверхность, при этом каждая из внутренних поверхностей ограничивает соответствующий внутренний объем. Полая цилиндрическая часть 242 деблокировочной пластины 240 расположена во внутреннем объеме полого внутреннего цилиндра 218. В одном неограничивающем варианте реализации электрический двигатель 212 расположен во внутреннем объеме, ограниченном внутренней поверхностью полой цилиндрической части 242 деблокировочной пластины 240. В таком варианте реализации вал 213 проходит сквозь отверстие на проксимальном конце деблокировочной пластины 240. Следовательно, в таком варианте реализации электрический двигатель 212 и соответствующие его компоненты считаются частью механизма 216 отвода и развертывания.
Полый внутренний цилиндр 218 расположен во внутреннем объеме, ограниченном внутренней поверхностью полого внешнего цилиндра 220. Таким образом, когда полый внутренний цилиндр 218 расположен во внутреннем объеме полого внешнего цилиндра 220, между наружной поверхностью полого внутреннего цилиндра 218 и внутренней поверхностью полого внешнего цилиндра 220 создается кольцевое пространство 226. Кольцевое пространство 226 продолжается вдоль участка длины полого внутреннего цилиндра 218 между дистальным концом цилиндрического устройства и фланцем 219 полого внутреннего цилиндра 218. Предпочтительно длина цилиндрической винтовой пружины 202, когда она максимально сжата, превышает длину, на которую продолжается кольцевое пространство 226, что позволяет дистальному концу 202а выступать, как описано выше.
Будучи в отведенном положении, цилиндрическая винтовая пружина 202 навита вокруг наружной поверхности внутреннего полого цилиндра 218 и сжата, целиком находясь при этом, за исключением дистального конца 202а и участков упругого опорного элемента 202, расположенных проксимально относительно дистального конца 202а, в кольцевом пространстве 226 между наружной поверхностью полого внутреннего цилиндра 218 и внутренней поверхностью полого внешнего цилиндра 220. Поскольку полая цилиндрическая часть 242 деблокировочной пластины 240 расположена во внутреннем объеме полого внутреннего цилиндра 218, фланец 244 обеспечивает перекрытие просвета кольцевого пространства 226 на дистальном конце цилиндрического устройства, не позволяя цилиндрической винтовой пружине 202 полностью выйти из кольцевого пространства 226. Участок криволинейного паза 246 соединен с кольцевым пространством 226, создавая проход для цилиндрической винтовой пружины 202 для перемещения в цилиндрическое устройство и из него в процессе перемещения между отведенным и развернутым положениями.
Фланец 219 продолжается приблизительно по последней Ул длины полого внутреннего цилиндра 218 в направлении проксимального конца цилиндрического устройства. Проксимальный конец 202b цилиндрической винтовой пружины 202 по размеру и расположению выполнен так, чтобы не допустить прохождения дистального конца 202 через криволинейный паз 246, не позволяя цилиндрической винтовой пружине 202 полностью отделиться от цилиндрического устройства. Таким образом, проксимальный конец 202b цилиндрической винтовой пружины 202 постоянно удерживается в кольцевом пространстве 226 в процессе перемещения между отведенным и развернутым положениями. Например, как изображено на ФИГ. 2 и 3В, проксимальный конец 202b выполнен с возможностью располагаться параллельно продольной оси цилиндрической винтовой пружины 202. Таким образом, механизм 216 отвода и развертывания, будучи реализованным в виде такого цилиндрического устройства, дополнительно выполняет функцию корпуса, чтобы заключать в себя и удерживать почти всю цилиндрическую винтовую пружину 202, которая постоянно целиком удерживается в кожухе 106, как вкратце описано выше.
В одном неограничивающем варианте реализации цилиндрическое устройство может дополнительно включать в себя полый промежуточный цилиндр 221, имеющий внутреннюю и наружную поверхности, при этом внутренняя поверхность ограничивает внутренний объем. В таком варианте реализации полый внутренний цилиндр 218 расположен во внутреннем объеме, ограниченном внутренней поверхностью полого промежуточного цилиндра 221, при этом полый промежуточный цилиндр 221 расположен во внутреннем объеме, ограниченном внутренней поверхностью полого внешнего цилиндра 220.
Полый промежуточный цилиндр 221 включает в себя две части, имеющие два разных внутренних диаметра, а именно основную часть 223, имеющую первый внутренний диаметр, и часть 225 с внутренним выступом, имеющую второй внутренний диаметр. Первый внутренний диаметр превышает второй внутренний диаметр. Место в полом промежуточном цилиндре 221, в котором происходит изменение внутреннего диаметра, образует ступень 227, определяющую самую дальнюю точку, в которой может располагаться проксимальный конец 202b цилиндрической винтовой пружины 202 в кольцевом пространстве 226. Использование полого промежуточного цилиндра 221 приводит к более высокой степени сжатия цилиндрической винтовой пружины 202 в отведенном положении.
Крышка 222 цилиндра соединена с обоими цилиндрами 218 и 220 и закрывает их на проксимальных концах цилиндров 218 и 220, жестко удерживая электрический двигатель 212 в пределах деблокировочной пластины 240, при этом полая цилиндрическая часть 242 деблокировочной пластины 240 находится в полом внутреннем цилиндре 218, а полый внутренний цилиндр 218 находится в полом внешнем цилиндре 220. Крышка 222 цилиндра также соединена с зубчатой передачей 214 и закрывает ее посредством крышки 224 зубчатой передачи. Для более прочного закрепления жестко встроенных электрического двигателя 212, полого внутреннего цилиндра 218 и полого внешнего цилиндра 220 могут использоваться дополнительные крепления.
Благодаря вышеописанному взаимному соединению компонентов цилиндрического устройства запуск электрического двигателя 212, выполняемый блоком 204 управления, вызывает вращение вала 213, которое, в свою очередь, вызывает вращение обоих цилиндров 218 и 220. Таким образом, цилиндры 218 и 220 совершают вращение как единое тело, что заставляет цилиндрическую винтовую пружину 202 вращаться вокруг продольной оси цилиндрической винтовой пружины 202.
Как упоминалось выше, кольцевое пространство 226 и криволинейный паз 246 обеспечивают путь для прохождения цилиндрической винтовой пружины 202 в цилиндрическое устройство и из него в процессе перемещения между отведенным и развернутым положениями. Следовательно, вращение цилиндров 218 и 220 заставляет цилиндрическую винтовую пружину 202 удлиняться или укорачиваться, а дистальный конец 202а - выступать из цилиндрического устройства или отводиться в него сквозь криволинейный паз 246 через отверстие 110 при перемещении между отведенным положением и развернутым положением.
Перемещение из отведенного положения в развернутое положение вызывается приведением в действие электрического двигателя 212, осуществляемого блоком 204 управления, что заставляет цилиндрическое устройство вращаться в направлении по часовой стрелке (если смотреть с проксимального конца кожуха 106). Вращение по часовой стрелке цилиндрического устройства заставляет цилиндрическую винтовую пружину 202 вращаться по часовой стрелке вокруг продольной оси, принудительно выводя дистальный конец 202а через криволинейный паз 246 и далее из отверстия 110, тем самым увеличивая длину цилиндрической винтовой пружины 202 от начальной длины в сжатом состоянии (ФИГ. 3А) к начальной развернутой длине (ФИГ. 1В) и, в конечном счете, к максимальной развернутой длине (ФИГ. 1С) развернутого положения. По мере того как дистальный конец 202а принудительно выводится через криволинейный паз 246 и далее из отверстия 110, цилиндрическая винтовая пружина 202 разматывается с наружной поверхности полого внутреннего цилиндра 218. Вращение по часовой стрелке позволяет цилиндрической винтовой пружине 202 продвигаться (т.е. удлиняться) под действием собственной силы, не прибегая к необходимости генерировать аксиальные силы для проталкивания цилиндрической винтовой пружины 202 в полость рта и/или верхние дыхательные пути.
Аналогичным образом при перемещении из развернутого положения в отведенное положение приведение в действие электрического двигателя 212, осуществляемое блоком 204 управления, заставляет цилиндрическое устройство вращаться в направлении против часовой стрелки. Вращение против часовой стрелки цилиндрического устройства заставляет цилиндрическую винтовую пружину 202 вращаться против часовой стрелки вокруг продольной оси, подтягивая дистальный конец 202а в направлении отверстия 110 и криволинейного паза 246 и сокращая длину цилиндрической винтовой пружины 202 от развернутой длины к длине в полностью сжатом состоянии и начальной длине отведенного положения (ФИГ. 3А). Таким образом, вращение против часовой стрелки цилиндрической винтовой пружины 202 заставляет цилиндрическую винтовую пружину 202 наматываться вокруг наружной поверхности полого внутреннего цилиндра 218 в кольцевом пространстве 226.
В одном неограничивающем варианте реализации электромеханическое приводное устройство 210 выполнено с возможностью непрерывно вращать цилиндрическую винтовую пружину 202 по часовой стрелке, после того как цилиндрическая винтовая пружина 202 достигла развернутого положения и, в конечном счете, после того как цилиндрическая винтовая пружина 202 достигла максимальной развернутой длины. Скорость вращения цилиндрической винтовой пружины 202 в направлении по часовой стрелке после достижения максимальной развернутой длины предпочтительно лежит в диапазоне 0,1-1 поворотов в минуту. Таким образом, после того как она полностью развернута, цилиндрическая винтовая пружина 202 перемещается посредством вращения относительно различных контактных точек ткани внутри полость рта и/или верхних дыхательных путей, совершая ритмическое движение или движение другого типа, которое электрический двигатель 212 может выполнить согласно введенной программе. В результате дистальный конец 202а постоянно меняет области контакта между цилиндрической винтовой пружиной 202 и тканью в полости рта и/или верхних дыхательных путях. Это уменьшает риск развития повреждений, связанных с давлением, вследствие повышенного давления на область касания ткани и давления ниже атмосферного в верхних дыхательных путях вследствие вдыхания воздуха пользователем. Кроме того, такое непрерывное вращение и перемещение повышают эффективность внутриротового устройства 10 путем изменения положения упругого опорного элемента 202 для контакта с областью касания ткани в случае, если упругий опорный элемент 202 смещается языком или другими мышцами в полости рта.
Как упоминалось выше, блок 204 управления приводит в действие электрический двигатель 212 для управления механизмом 216 отвода и развертывания. Приведение в действие блоком 204 управления может основываться на входном сигнале, полученном от схемы 230 датчиков, в состав которой могут входить множество датчиков для предоставления информации и данных, касающихся пользователя, в том числе, но не ограничиваясь перечисленным, датчики давления воздуха, датчики потока воздуха, датчики температуры, оптические датчики частоты сердечных сокращений, оптические датчики пульсоксиметрии, датчики для электромиографии (EMG), датчики силы, акустические датчики, датчики движения, а также датчики влажности. Такие датчики могут быть реализованы в виде трансдьюсеров и предпочтительно сообщаются по текучей среде с воздухом в полости рта пользователя, либо должным образом установлены в кожухе 106, чтобы надлежащим образом генерировать соответствующие электрические сигналы. Такие датчики могут использоваться для сбора данных и оценки физиологического состояния пользователя, например, с помощью определения параметров для оценки статуса дыхательной деятельности, наступления апноэ и гипопноэ, насыщения крови кислородом, частоты сердечных сокращений, общих движений тела, бруксизма, храпа и статуса сон/бодрствование.
Датчики схемы 230 датчиков передают электрические сигналы в блок 204 управления, которые предпочтительно оцифровываются ADC 207 перед обработкой процессором 205. Процессор 205 предпочтительно выполняет программный код в реальном времени, например, встроенную программу, обеспечивающую возможность работы в режиме реального времени компонентов внутриротового устройства 10. Таким образом, блок 204 управления может запускать электромеханическое приводное устройство 210 для развертывания цилиндрической винтовой пружины 202 с заданной скоростью развертывания, отвода цилиндрической винтовой пружины 202 с заданной скоростью отвода, а также непрерывного вращения цилиндрической винтовой пружины 202 с заданной скоростью после перемещения в развернутое положение. Кроме того, данные, собранные с датчиков схемы 230 датчиков, могут храниться в носителе 208 информации или другом запоминающем устройстве, например, энергонезависимом запоминающем устройстве, соединенном с процессором 205, для анализа. Те же данные датчиков могут использоваться для изменения функционирования программного кода в реальном времени, так чтобы повысить эффективность лечения. Например, такое изменение может приводить к увеличению длины развернутого упругого опорного элемента 202, если по-прежнему наблюдается проявление апноэ, когда упругий опорный элемент 202 уже развернут, либо может предотвращаться развертывание упругого опорного элемента 202, если данные датчиков говорят о том, что пользователь по-прежнему бодрствует. Дополнительные условия для таких изменений будут представлены более подробно в последующих разделах настоящего раскрытия.
Схема 230 датчиков может также содержать датчик целостности для оценки целостности упругого опорного элемента 202. Таким образом, если на основе сигналов, принятых с датчика целостности, определяется, что целостность упругого опорного элемента 202 нарушена вследствие неисправности или повреждения, блок 204 управления может быть выполнен с возможностью воздержаться от приведения в действие электромеханического приводного устройства 210 для перемещения упругого опорного элемента 202 либо в развернутое, либо в отведенное состояние, чтобы избежать травм ткани в полости рта и/или верхних дыхательных путях, а также избежать дальнейшего повреждения внутриротового устройства 10.
Как упоминалось выше, внутриротовое устройство 10 может быть соединено с возможностью отсоединения с прикроватным блоком 300, соединенным с сетевым источником питания, который включает в себя зарядное устройство 302 для перезарядки перезаряжаемого источника 206 питания посредством металлических винтов 108. Соединение с возможностью отсоединения внутриротового устройства 10 с прикроватным блоком 300 может осуществляться посредством приемного интерфейса (не показан) в прикроватном блоке, например, стыковочного узла.
Внутриротовое устройство 10 посредством блока 204 управления может быть выполнено с возможностью развертывания цилиндрической винтовой пружины 202 до максимальной развернутой длины, когда внутриротовое устройство 10 состыковано со стыковочным узлом прикроватного блока 300. Такое развертывание позволяет проводить очистку и дезинфекцию цилиндрической винтовой пружины 202 в ручном или автоматическом режиме во время пребывания в состыкованном состоянии. Кроме того, во время пребывания в состыкованном состоянии может проводиться оценка целостности компонентов и подкомпонентов внутриротового устройства. По завершении очистки, дезинфекции и оценки целостности цилиндрическая винтовая пружина 202 перемещается в отведенное положение.
Кроме того, прикроватный блок 300 предпочтительно включает в себя блок 304 управления и пользовательский интерфейс (UI) 312. Как показано на ФИГ. 6, блок 304 управления включает в себя по меньшей мере один процессор 305, соединенный с носителем 308 информации, таким как запоминающее устройство и т.п. Процессор 305 может представлять собой любое число процессоров компьютера, в том числе, но не ограничиваясь перечисленным, микроконтроллер, микропроцессор, ASIC, DSP, а также машину положений. Такие процессоры включают в себя или могут обмениваться информацией с машиночитаемыми носителями, хранящими программный код или наборы инструкций, которые при выполнении их процессором, заставляют процессор выполнять действия. В число видов машиночитаемых носителей входят, но не ограничиваясь перечисленным, электронные, оптические, магнитные или другие устройства хранения или передачи данных, способные снабжать процессор машиночитаемыми инструкциями.
В одном неограничивающем варианте реализации оба блока 204 и 304 управления соединены с соответствующими модулями 209 и 309 связи, позволяя внутриротовому устройству 10 передавать зарегистрированные физиологические данные, а также параметры, зарегистрированные посредством схемы 230 датчиков, в прикроватный блок 300. Сообщение между модулями 209 и 309 связи может обеспечиваться посредством соответствующей схемы связи ближнего действия, известной в данной области техники. Таким образом, блок 204 управления выполнен с возможностью задействовать модуль 209 связи для передачи таких данных в модуль 309 связи. Данные, полученные модулем 309 связи, могут далее храниться на носителе 308 информации или в другом запоминающем устройстве, например энергонезависимом запоминающем устройстве, соединенном с процессором 305, для анализа. Кроме того, используя инструкции, переданные модулем 309 связи и полученные модулем 209 связи, блок 304 управления может быть выполнен с возможностью приведения в действие электромеханического приводного устройства 210 для перемещения цилиндрической винтовой пружины 202 между отведенным и развернутым положениями или в любую точку между этими положениями.
UI 312 постоянно соединен с блоком 304 управления, а также может соединяться с блоком 204 управления, когда внутриротовое устройство 10 состыковано с прикроватным блоком 300. Таким образом, UI 312 позволяет пользователю извлекать данные, хранящиеся в запоминающем устройстве внутриротового устройства 10 или прикроватного блока 300, например, на носителях 208 и 308 информации. Прикроватный блок 300 может дополнительно включать в себя входной и выходной порты для соединения прикроватного блока 300 с вычислительным устройством, например переносным или настольным компьютером, либо персональным связным вычислительным устройством, например планшетом или смартфоном. UI 312 может быть реализован в виде любой пригодной интерфейсной платформы, например, сенсорного экрана и т.п.
В дополнение к вышесказанному UI 312 также позволяет пользователю выбирать разные режимы работы внутриротового устройства 10 при его использовании. Чтобы лучше понять работу внутриротового устройства 10, в настоящем описании представлено несколько различных режимов развертывания. Следует понимать, что режимы развертывания, которые будут приведены в настоящем описании, представляют неограничивающие примеры возможных сценариев развертывания внутриротового устройства 10, при этом могут существовать другие сценарии развертывания внутриротового устройства 10.
Один неограничивающий пример режима развертывания далее именуется "режимом с установленным временем срабатывания". В режиме с установленным временем срабатывания блок 204 управления приводит в действие электромеханическое приводное устройство 210, чтобы начать перемещение цилиндрической винтовой пружины 202 из отведенного положения в развернутое положение, по истечении заданного периода времени с момента активации внутриротового устройства 10. Заданный период времени предпочтительно устанавливается пользователем посредством UI 312, когда внутриротовое устройство 10 состыковано с прикроватным блоком 300. Таким образом, внутриротовое устройство 10 становится активным, или активируется, при отсоединении внутриротового устройства 10 от прикроватного блока 300. Пользователь предпочтительно устанавливает заданное время, чтобы иметь достаточно времени заснуть, перед тем как начнется перемещение цилиндрической винтовой пружины 202. Таким образом, посредством базового элемента 102 пользователь прикрепляет внутриротовое устройство 10 ко рту, когда цилиндрическая винтовая пружина 202 находится в отведенном положении, и засыпает. Когда заданное время истекает, цилиндрическая винтовая пружина 202 перемещается из отведенного положения в развернутое положение.
Другой неограничивающий режим развертывания далее именуется "режимом сна". В режиме сна блок 204 управления анализирует сигналы, принятые от схемы 230 датчиков и прошедшие через ADC-модуль 207 и процессор 205, как говорилось выше. Такие сигналы могут содержать указание на наличие одного или нескольких физиологических параметров, собранных в полости рта, в том числе, но не ограничиваясь перечисленным, воздушного потока при дыхании, температуры, влажности, частоты сердечных сокращений, оксиметрии, а также EMG языка или других мышц в полости рта. Анализ полученных сигналов блоком 204 управления позволяет блоку 204 управления определить, спит пользователь или бодрствует. После того как блок 204 управления определил (т.е. распознал) наступление сна или любого другого заданного этапа сна или осложнения, блок 204 управления приводит в действие электромеханическое приводное устройство 210, чтобы начать перемещение цилиндрической винтовой пружины 202 из отведенного положения в развернутое положение.
Другой неограничивающий режим развертывания далее именуется "режимом апноэ". Как и в режиме сна, в режиме апноэ блок 204 управления анализирует сигналы, принятые от схемы 230 датчиков и прошедшие через ADC-модуль 207 и процессор 205, как говорилось выше. Такие сигналы могут содержать указание на то, испытывает ли пользователь дыхательную недостаточность, например, храпит, испытывает гипопноэ или апноэ. Анализ полученных сигналов блоком 204 управления позволяет блоку 204 управления определить, переживает ли пользователь такие респираторные эпизоды. После того как блок 204 управления определил (т.е. распознал) наступление таких респираторных эпизодов, блок 204 управления приводит в действие электромеханическое приводное устройство 210, чтобы начать перемещение цилиндрической винтовой пружины 202 из отведенного положения в развернутое положение.
Режим с установленным временем срабатывания, режим сна и режим апноэ имеют общее в том, что внутриротовое устройство 10 расположено во рту пользователя посредством базового элемента 102, при этом цилиндрическая винтовая пружина 202 находится в отведенном положении. Кроме того, в вышеописанных режимах перемещение цилиндрической винтовой пружины 202 из отведенного положения в развернутое положение происходит после того, как пользователь засыпает. Таким образом, введение внутриротового устройства 10 в полость рта, когда цилиндрическая винтовая пружина 202 находится в отведенном положении, снижает рвотный рефлекс при введении, а также уменьшает отрицательные психологические эффекты, связанные с введением внутриротового устройства 10 в полость рта.
Как говорилось ранее, пока цилиндрическая винтовая пружина 202 находится в развернутом положении на протяжении трех вышеупомянутых режимов использования, электромеханическое приводное устройство 210 может быть выполнено с возможностью непрерывно вращать цилиндрическую винтовую пружину 202 для уменьшения риска появления ран вследствие давления в полости рта и/или верхних дыхательных путях. Кроме того, блок 204 управления может быть выполнен с возможностью приведения в действие электромеханического приводного устройства 210 для регулировки длины цилиндрической винтовой пружины 202, поддерживая при этом цилиндрическую винтовую пружину 202 в развернутом положении, на основе степени тяжести дыхательной недостаточности, оцененной из сигналов, полученных от схемы 230 датчиков. Таким образом, блок 204 управления может приводить в действие электромеханическое приводное устройство 210 для удлинения цилиндрической винтовой пружины 202, когда дыхательная недостаточность выражена в большей степени, и укорочения цилиндрической винтовой пружины 202, когда дыхательная недостаточность выражена в меньшей степени. Другими словами, при пребывании в развернутом положении блок 204 управления может приводить в действие электромеханическое приводное устройство 210 для изменения длины цилиндрической винтовой пружины 202 в сторону максимальной развернутой длины, когда дыхательная недостаточность выражена в большей степени, и в сторону начальной развернутой длины, когда дыхательная недостаточность выражена в меньшей степени.
По мере того как пользовать приближается к пробуждению, цилиндрическая винтовая пружина 202 перемещается из развернутого положения в отведенное положение. Такое перемещение может осуществляться различными способами. Чтобы лучше понять работу внутриротового устройства 10, в настоящем описании представлено несколько различных режимов отвода. Следует понимать, что режимы отвода, которые будут приведены в настоящем описании, представляют неограничивающие примеры возможных сценариев отвода внутриротового устройства 10, при этом могут существовать другие сценарии отвода внутриротового устройства 10.
Один режим отвода схож с методикой режима с установленным временем срабатывания, описанного выше. При таком режиме отвода, когда внутриротовое устройство 10 состыковано с прикроватным блоком 300, посредством UI 312 может устанавливаться момент времени, в который блок 204 управления приводит в действие электромеханическое приводное устройство 210 для перемещения цилиндрической винтовой пружины 202 из развернутого положения в отведенное положение. В качестве альтернативы внутриротовое устройство 10 посредством модуля 209 связи может воспринимать момент времени в виде входного сигнала от внешнего будильника или посредством будильника, встроенного в прикроватный блок 300. В качестве альтернативы внутриротовое устройство 10 посредством модуля 209 связи или блока 204 управления может воспринимать момент времени в виде входного сигнала от беспроводного или проводного устройства дистанционного управления. Предпочтительно блок 204 управления приводит в действие электромеханическое приводное устройство 210 для перемещения цилиндрической винтовой пружины 202 из развернутого положения в отведенное положение незадолго до установленного момента времени, предоставляя достаточно времени для отвода, прежде чем пользователь проснется. Таким образом, при пробуждении от сна пользователь может извлечь внутриротовое устройство 10 изо рта, при этом цилиндрическая винтовая пружина 202 по большей части или полностью отведена назад.
Другой режим отвода схож с методикой режима сна и режима апноэ, описанных выше. При таком режиме отвода блок 204 управления анализирует сигналы, принятые от схемы 230 датчиков и прошедшие через ADC-модуль 207 и процессор 205, как говорилось выше. Такие сигналы могут содержать указание на то, проявляет ли пользователь признаки пробуждения, например, на основе EMG, повышенной вариабельности сердечного ритма и повышенной подвижности тела. Анализ полученных сигналов блоком 204 управления позволяет блоку 204 управления определить, проявляет ли пользователь такие признаки пробуждения. После того как блок 204 управления определил (т.е. распознал) пробуждение, блок 204 управления приводит в действие электромеханическое приводное устройство 210, чтобы начать перемещение цилиндрической винтовой пружины 202 из развернутого положения в отведенное положение.
Кроме того, блок 204 управления может анализировать полученные сигналы от схемы 230 датчиков за период нескольких ночей, чтобы определить или спрогнозировать время пробуждения пользователя. Такой прогноз может выполняться путем реализации посредством процессора 205 алгоритмов, например, алгоритмов контролируемого обучения, алгоритмов неконтролируемого обучения, а также алгоритмов распознавания образов. Таким образом, блок 204 управления способен активировать электромеханическое приводное устройство 210, чтобы начать перемещение цилиндрической винтовой пружины 202 из развернутого положения в отведенное положение в спрогнозированное время пробуждения.
Вышеописанные режимы отвода могут эффективно использоваться с любым из вышеупомянутых режимов развертывания (например, режимом с установленным временем срабатывания, режимом сна и режимом апноэ). Следует отметить, что в дополнение к режимам отвода, описанным выше, пользователь может извлечь внутриротовое устройство 10 изо рта, когда цилиндрическая винтовая пружина 202 находится в развернутом положении. Форма цилиндрической винтовой пружины 202, а также материал, используемый для образования цилиндрической винтовой пружины 202, позволяют цилиндрической винтовой пружине 202 деформироваться, принимая, в общем, форму прямой проволоки, когда внутриротовое устройство 10 извлекается изо рта в состоянии, в котором цилиндрическая винтовая пружина 202 находится в развернутом положении. Это не позволяет цилиндрической винтовой пружине 202 зацепиться или застрять в структурах ротовой полости и верхних дыхательных путей, например, небном язычке. После извлечения изо рта пользователя, в общем, прямая проволока принимает форму цилиндрической винтовой пружины 202.
Хотя в описанном внутриротовом устройстве 10 все компоненты электромеханического узла 200 размещены в кожухе 106, возможны другие варианты осуществления, в которых ряд компонентов электромеханического узла 200 расположены вне кожуха 106 и вне полости рта пользователя. Например, такие варианты осуществления могут содержать позиционирование некоторых датчиков схемы 230 датчиков вне полости рта пользователя. Кроме того, приведение в действие электромеханического приводного устройства 210 может обеспечиваться блоком управления, находящимся вне полости рта пользователя, например, блоком 304 управления прикроватного блока 300. Кроме того, механические компоненты электромеханического приводного устройства 210 также могут располагаться вне полости рта пользователя. В таких вариантах осуществления компоненты, расположенные вне полости рта пользователя, предпочтительно электрически и/или механически соединены с компонентами, расположенными в кожухе 106.
Описание различных вариантов осуществления настоящего изобретения представлено с целью иллюстрации, но не является исчерпывающим или ограниченным раскрытыми вариантами осуществления. Средний специалист в данной области техники сможет предложить множество модификаций и изменений без отступления от существа и объема описанных вариантов осуществления. Терминология, использованная в настоящем описании, выбрана для наилучшего объяснения принципов, заложенных в вариантах осуществления, практического применения или технического усовершенствования технологий, имеющихся на рынке, либо чтобы позволить другим средним специалистам в данной области техники понять варианты осуществления, раскрытые в настоящем описании.
В контексте настоящего описания артикли единственного числа "a", "an", а также определенный артикль "the" могут использоваться для объектов во множественном числе, если явно не указано обратное.
Термин "приведенный в качестве примера" в настоящем описании подразумевает "служащий в качестве примера, образца или иллюстрации". Ни один вариант осуществления или реализации, описанный как "приведенный в качестве примера", не следует обязательно толковать как предпочтительный по отношению к другим вариантам осуществления и/или не допускающий включения признаков из других вариантов осуществления.
Следует понимать, что определенные признаки изобретения, которые для упрощения описаны в контексте отдельных вариантов осуществления, могут быть также объединены в одном варианте осуществления. Наоборот, различные признаки изобретения, которые для краткости описаны в контексте одного варианта осуществления, могут также присутствовать по отдельности или в любой пригодной подкомбинации, или по необходимости в любом другом описанном варианте осуществления изобретения. Конкретные элементы, описанные в контексте различных вариантов осуществления, не следует рассматривать как существенные элементы этих вариантов осуществления, если только вариант осуществления не будет неработоспособен без этих элементов.
Хотя изобретение описано в привязке к конкретным вариантам его осуществления, несомненно, что для специалистов в данной области техники станут очевидны возможные альтернативы, модификации и изменения. Соответственно предполагается охватить все такие альтернативы, модификации и изменения, которые подпадают под суть и широкий объем прилагаемой формулы изобретения.