Результат интеллектуальной деятельности: Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании
Вид РИД
Изобретение
Изобретение относится к области геодезического приборостроения, в частности к гравиметрам, и предназначено для повышения точности определения абсолютного ускорения силы тяжести (УСТ) на подвижном основании.
Известны схема [1], в которой в качестве устройства для снижения влияния поступательных перемещений на показания абсолютного гравиметра использован относительный гравиметр, установленный рядом с абсолютным гравиметром. В схеме организован контур обратной связи, в котором абсолютный гравиметр корректирует относительный в низкочастотной области, а относительный гравиметр корректирует абсолютный гравиметр в высокочастотной области.
Известен относительный гравиметр [2], в котором груз подвешен на плоских пружинах, а сила тяжести определяется оптическими средствами. Недостатками гравиметра являются невозможность его работы на подвижном основании из-за малой перегрузочной способности и возникновения долго затухающих собственных колебаний при воздействии внешней силы.
Для устранения этих недостатков разработан относительный гравиметр [3], в котором для обеспечения работоспособности на подвижном основании груз на упругом подвесе помещен в вязкую жидкость. Отклонение груза измеряются оптическими средствами. Недостатками такой схемы является большая постоянная времени гравиметра и разомкнутая схема измерения, в которой положение груза изменяется относительно корпуса, что приводит к погрешностям, определяемым течениями в жидкости.
В гравиметре [4] имеется следящая система с оптическим датчиком перемещений, удерживающая груз в постоянном относительно корпуса положении. Груз и в этом гравиметре также помещен в вязкую жидкость, которая создает большую постоянную времени гравиметра, вызывающую искажение фазы сигнала на частотах качки.
Задачей изобретения является повышение точности измерения УСТ в морских условиях.
Это достигается тем, что в отличие от известного технического решения с использованием двух: абсолютного и относительного гравиметров с одной следящей системой, в комплексе использованы две системы обратной связи, работающие на два двигателя, но управляемые одним датчиком положения - туннельным микроскопом [5]. Одна - известная система стабилизации с относительно большой постоянной времени. Она управляет через абсолютный гравиметр первым двигателем на частотах изменения УСТ. Другая - следящая система с меньшей постоянной времени управляет вторым двигателем через свой усилитель на частотах качки. Груз относительного гравиметра размещен на закрепленной по контуру упругой мембране, изготовленной из материала с высоким внутренним демпфированием [6].
Технический результат заключается в повышении точности определения УСТ за счет уменьшения погрешностей измерения инерциальных ускорений.
Устройство системы приведено на схеме. На ней изображены следующие элементы:
1 - относительный гравиметр,
2 - абсолютный гравиметр,
3 - мембрана,
4 - пробное тело,
5 - зонд туннельного микроскопа,
6 - подложка туннельного микроскопа,
7, 8 - неподвижные обкладки первого (емкостного) двигателя,
9 - подвижная обкладка первого (емкостного) двигателя,
10 - пьезоэлектрический актюатор второго двигателя,
11 - преобразователь - усилитель второго двигателя,
12 - преобразователь -усилитель первого двигателя.
Предлагаемый комплекс содержит относительный гравиметр 1 и абсолютный гравиметр 2. В относительном гравиметре на мембране 3 укреплен груз 4, неизменность положения которого относительно корпуса поддерживается системой стабилизации. Датчиком перемещения системы служит туннельный микроскоп с зондом 5 и подложкой 6. В относительном гравиметре установлен первый - емкостной двигатель с обкладками 7, 8, 9, и второй - пьезоэлектрический двигатель с актюатором 10. Преобразователь-усилитель 11, по входу соединен с туннельным микроскопом, а по выходу с абсолютным гравиметром и актюатором. Выход абсолютного гравиметра соединен с преобразователем - усилителем 12, выход которого подключен к первому двигателю.
При работе относительный гравиметр устанавливают на одной платформе с абсолютным гравиметром. Абсолютный гравиметр измеряет сумму гравитационного и инерционного ускорений на частоте превышающей fаг=5 кГц. Для получения истинного значения ускорения силы тяжести (УСТ) необходимо вычесть из измеренной суммы инерциальную составляющую, которая на подвижном основании может достигать величины а=100 Гал, и затем статистическими методами снизить ошибки измерений до сопоставимых с получаемыми на неподвижном основании. Чем точнее измеряются инерциальные ускорения, тем меньший массив измерений необходим для усреднения с заданной точностью, а при неизменном массиве повышается точность измерений. В существующих морских относительных гравиметрах для повышения перегрузочной способности и сглаживания колебаний на частоте качки груз помещают в демпфирующую жидкость, обеспечивая постоянную времени механической системы около Т=1000 с [7] и частоту среза fcpеза1=10-3 ГЦ. При этом сигналы независимо от их происхождения с частотами качки fк=0,1 Гц подавляются. Возникает противоречие требованию, на основании которого для обеспечения коррекции абсолютного гравиметра, сигнал относительного гравиметра на частоте качки, порядка fк=0,1 Гц, должен вырабатываться с минимальными амплитудными и фазовыми искажениями. Чтобы этого достичь, необходимо построить систему с частотой среза порядка fcpеза2=103 Гц. Такую частоту можно получить в сухом гравиметре [2]. Однако в нем сложно обеспечить диапазон измерений δgабс=109 (точность на уровне Δа=1 мкГал в диапазоне g=1000 Гал). Задача облегчается тем, что большая часть этого диапазона величина постоянная. От относительного гравиметра в предлагаемом комплексе требуется измерять приращения ускорения, вызванные качкой корабля, величиной не более акач=100 Гал. С учетом дальнейшего усреднения, требования к точности можно снизить на два порядка, что сократит диапазон до δgотн=106. В схемах [2, 3] с разомкнутой схемой измерения получить такой диапазон измерения инерциальных ускорений трудно. Поэтому предлагается комплекс с сухим гравиметром и двумя замкнутыми следящими системами.
При отсутствии демпфирующей жидкости в механической системе гравиметра могут возникать упругие колебания с амплитудой превышающей диапазон работы туннельного микроскопа и частотой превышающей диапазон работы следящей системы. Поэтому мембрана относительного гравиметра должны быть изготовлены из материалов с высоким внутренним демпфированием [6].
Оценим прогиб L стальной мембраны радиусом R=10-2[м], нагруженной пробным телом с массой m=0,01 кг, при ускорении силы тяжести -  Известны формулы для прогиба упругой пластины, нагруженной в центре и закрепленной по окружности [8]
Известны формулы для прогиба упругой пластины, нагруженной в центре и закрепленной по окружности [8]

где Р=mg=0,1 [Н] - нагрузка в центре пластины
h[м] - толщина пластины
Е=2*1011 [Па], - модуль упругости
μ=0,28 - коэффициент Пуассона
Примем  учтем, что
учтем, что  [м2], перепишем выражение для прогиба в более удобном виде и рассчитаем величину максимального прогиба при ускорении g.
[м2], перепишем выражение для прогиба в более удобном виде и рассчитаем величину максимального прогиба при ускорении g.

В первой системе стабилизации для устранения прогиба использован емкостной двигатель. Примем, что обкладки конденсатора представляют собой круглые плоские диски [9]. Выше было принято, что используется груз, массой 10 г развивающий усилие F=0,1H. Определим диаметр диска конденсатора, развивающего это усилие,

В формуле [9]приняты размерности - для зазора d [мм], для площади - S [см2] Запишем формулу с одинаковой линейной размерностью [см]
F=3.5*10-5(ND)2
Где  - напряженность поля, К - коэффициент запаса,
- напряженность поля, К - коэффициент запаса,
 - допустимая напряженность поля в вакууме.
- допустимая напряженность поля в вакууме.
При коэффициенте запаса К=1000 получим диаметр обкладок конденсатора

В морских условиях инерционные ускорения качки и орбитального движения достигают величин 0,1g, под действием которых мембрана будет прогибаться на L1max=10-6m. Такой прогиб компенсируют пьезокерамическим актюатором [10].
При удельном прогибе  туннельный микроскоп [5] с разрешением
туннельный микроскоп [5] с разрешением
по перемещению Lразр=10-12[м] дает разрешение по ускорению

При движении корабля со скоростью  гравитационная аномалия длиной Q=100 м, преодолевается за t=10 с. Амплитуда гравитационной аномалии на море не превышает Δg<10-3g. Следовательно, скорость изменения УСТ при измерениях на движущимся корабле не превышает
гравитационная аномалия длиной Q=100 м, преодолевается за t=10 с. Амплитуда гравитационной аномалии на море не превышает Δg<10-3g. Следовательно, скорость изменения УСТ при измерениях на движущимся корабле не превышает  Ускорения, вызванные качкой, корабля имеет период порядка Ткач≈10 с и амплитуду акач=10-1g. Скорость изменения ускорения качки порядка
Ускорения, вызванные качкой, корабля имеет период порядка Ткач≈10 с и амплитуду акач=10-1g. Скорость изменения ускорения качки порядка  Отношение скоростей изменения гравитационных и инерционных ускорений
Отношение скоростей изменения гравитационных и инерционных ускорений
Приблизительное такое же соотношение постоянных времени  должно быть в первой следящей системе по отношению ко второй.
должно быть в первой следящей системе по отношению ко второй.
Технический эффект заключается в повышении точности абсолютных измерений УСТ на подвижном основании.
Комплекс для измерения абсолютного ускорения силы тяжести на подвижном основании состоящий из абсолютного гравиметра и относительного гравиметра со следящей системой, отличающийся тем, что в качестве датчика перемещения в относительном гравиметре использован туннельный микроскоп, пробное тело относительного гравиметра установлено на мембране, выполненной из сплава с высоким внутренним демпфированием, в комплекс введена вторая следящая система для удержания постоянным зазора между зондом и подложкой микроскопа, для обеих систем использован один датчик перемещения и разные двигатели: система с большей постоянной времени замкнута через абсолютный гравиметр на первый двигатель, а система с меньшей постоянной времени замкнута на второй двигатель.
Источники информации
1. Способ измерения на подвижном основании абсолютного значения ускорения свободного падения и гравиметры для его осуществления. Патент РФ №2523108 от 28.02.2013. Автор и патентообладатель Попов А.Б.
2. Гравиметр. Патент РФ №2253882 от 28.11.2003. Авторы: Быков А.П., Кулеш В.П., Москалик Л.М., Енина О.Е. Патентообладатель: Открытое акционерное общество "Нефтяные контрольно-измерительные приборы" ("Нефтекип").
3. Кварцевый гравиметр. Патент РФ №2171481 от 03.02.2000. Авторы и патентообладатели: Бронштейн И.Г., Лившиц И.Л., Элинсон Л.С.
4. Статический гравиметр Патент РФ 2427008 от 26.08.2009. Авторы изобретения: Неронов Н.Н., Денесюк Е.А. Патентообладатель: Открытое акционерное общество "Государственный научно-исследовательский навигационно-гидрографический институт Министерства обороны Российской.
5. Миронов В.Л. Основы сканирующей зондовой микроскопии. РАН. Институт физики микроструктур. Нижний Новгород. 2004 г.
6. Берштам Я.М., Евстифеев М.И., Елисеев Д.П. Исследование сплавов с высоким внутренним демпфированием в конструкции микромеханических гироскопов. 7-я Российская мульти конференция по проблемам управления. С-Петербург, 2014.
7. Л.К. Железняк, Е.И. Попов. Новая упругая система морского гравиметра. Гравиинерциальная аппаратура в геофизических исследованиях. М: ИФЗ АН СССР, 1988, с. 92.
8. Саргсян Строительная механика П17-1 DOK. StudFiles.net>preview/3189876/page 2.
9. Ацюковский В.А., Емкостные дифференциальные датчики перемещения. Библиотека по автоматике, вып. 12, Гос. энернго. издат, 1960, лист 15, ф. 15.
10. Бобцов А.А., Бойков В.И., Быстров С.В., Григорьев В.В. Исполнительные устройства и системы для микроперемещений. Санкт-Петербургский Государственный университет информационных технологий, механики и оптики. С-Пб, 2011.
Комплекс для измерения абсолютного ускорения силы тяжести на подвижном основании, состоящий из абсолютного гравиметра и относительного гравиметра со следящей системой, отличающийся тем, что в качестве датчика перемещения в относительном гравиметре использован туннельный микроскоп, пробное тело относительного гравиметра установлено на мембране, выполненной из сплава с высоким внутренним демпфированием, в комплекс введена вторая следящая система для удержания постоянным зазора между зондом и подложкой микроскопа, для обеих систем использован один датчик перемещения и разные двигатели: система с большей постоянной времени замкнута через абсолютный гравиметр на первый двигатель, а система с меньшей постоянной времени замкнута на второй двигатель.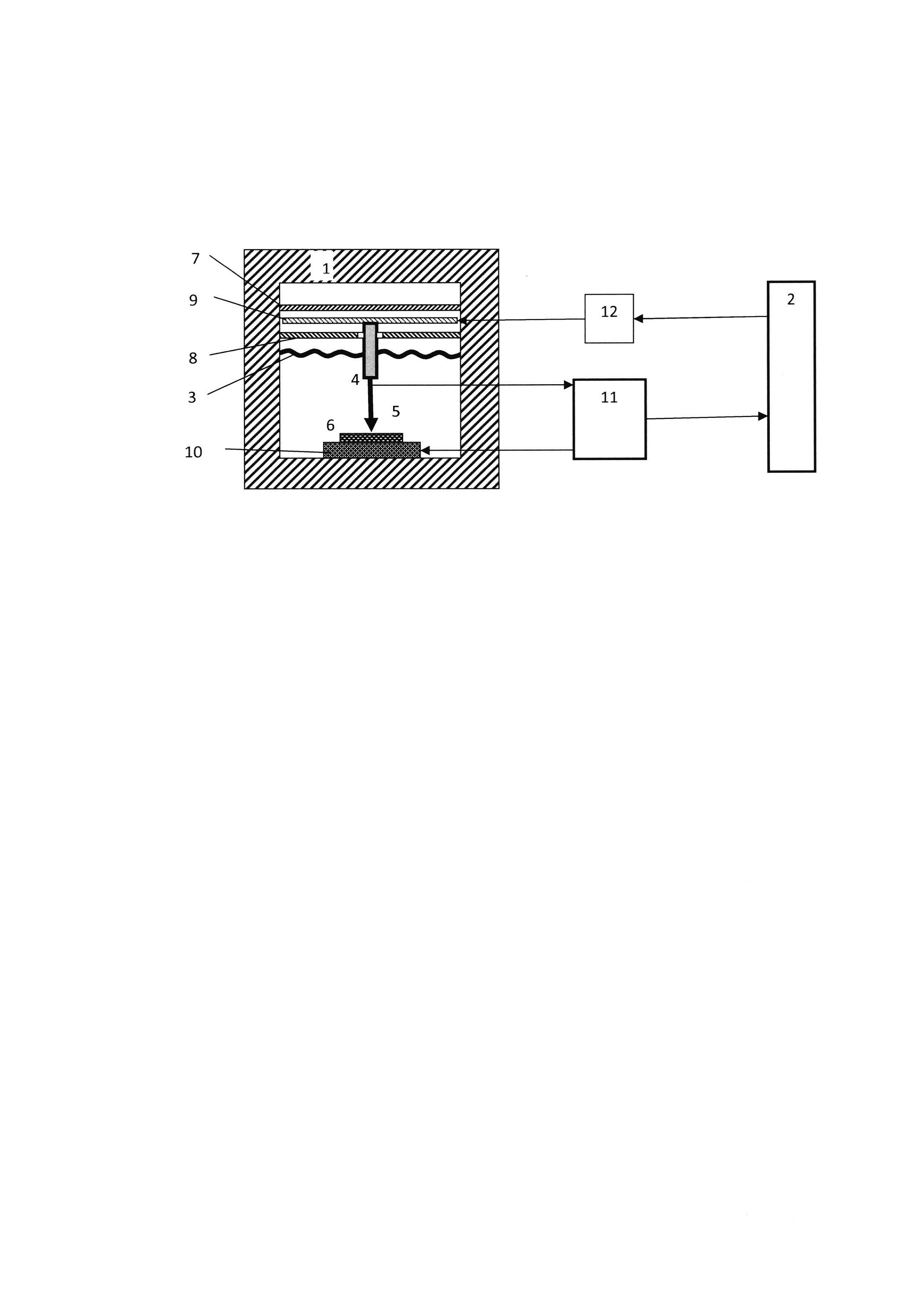
Система определения уклонений отвесной линии
Способ абсолютных измерений гравитационного поля на подвижном объекте
Прямой преобразователь перемещений для микромеханических приборов (датчик перемещений)
Астронавигационная система
Система определения уклонений отвесной линии
Способ абсолютных измерений гравитационного поля на подвижном объекте
Прямой преобразователь перемещений для микромеханических приборов (датчик перемещений)

