Результат интеллектуальной деятельности: МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ
Вид РИД
Изобретение
Изобретение относится к мехатронным системам и может найти применение в качестве конфигурируемой автономной транспортной платформы и многофункционального самодвижущегося устройства.
Конфигурирование такой мобильной автономной робототехнической платформы предполагает возможность изменения ее структуры за счет смены унифицированных блоков, которые определяют конкретное применение: на складах, в выставочных центрах или торговых комплексах и т.п.
Мобильная автономная робототехническая платформа с блочной изменяемой структурой имеет возможность расширить свой функционал за счет системы для интеграции навесных блоков.
Известны роботы, характеризующиеся высокой степенью модульности (патенты CN206154309, US5100286), позволяющие собирать сложные роботизированные механизмы на индивидуальной основе из относительно стандартизированных компонентов на эффективной и экономичной основе, что позволяет адаптироваться к применению их в сложных средах.
Известен робот (патент CN108436948), содержащий основание робота и группы колес. Колесные группы расположены с двух сторон нижней части основания робота; трансмиссионный вал соединен с одной стороны колесных групп; и синхронный шкив расположен на одной боковой поверхности вала трансмиссии и соединен с серводвигателем через синхронный ремень. Колесные группы расположены под основанием сервисного робота; каждая колесная группа включает в себя микросинхронные двигатели, гусеничные колеса и гусеничный ремень; во время ходьбы микросинхронные двигатели приводят в движение гусеничные колеса, чтобы приводить в движение гусеничный ремень. С помощью колёсных групп гусеничного типа с треугольными формами увеличивается площадь контакта робота с землей и, как следствие, улучшается устойчивость робота. Микросинхронные двигатели в каждой группе колес могут независимо управлять вращением группы колес, что обеспечивает удобство управления роботом.
Известен интеллектуальный робот-переносчик для интеллектуального склада (патент CN205345972), обеспечивающий повышение логистической эффективности предприятия, и робот для обслуживания клиентов на объекте (патент US 9,796,093), включающий платформу для передвижения, верхний датчик для обнаружения объектов в верхнем поле зрения робота, нижний датчик для обнаружения объектов в нижнем поле зрения робота, дисплей и компьютер робота в связи с платформой передвижения, верхним датчиком и нижним датчиком. Робот-компьютер сконфигурирован для обнаружения присутствия клиента в учреждении на основе информации, полученной по меньшей мере от одного из верхнего датчика и нижнего датчика, и робот-компьютер дополнительно сконфигурирован для доступа к одной или нескольким базам данных, хранящим информацию, связанную с доступными продуктами. для клиентов на объекте и для обеспечения обслуживания клиентов на основе доступной информации.
Известен роботизированный модуль (патент WO2018178458), который с помощью одного привода может перемещаться в трехмерной среде. Роботизированный модуль имеет простую и легкую конфигурацию с рамой, содержащей первый вал, приводимый в действие приводом . Для выполнения трехмерного перемещения роботизированный модуль содержит, по меньшей мере, два механизма передачи для перемещения средства передачи, прочно соединенного с валами, содержащими средства сцепления на его концах. Движение реализуется путем прикрепления одного из адгезивных средств к поверхности так, что рама вращается вокруг вала, содержащего указанные адгезионные средства.
Известен мобильный роботизированный комплекс пожаротушения (патент RU0002580779), состоящий из шасси, корпуса с отсеками для силовой части, для системы пожаротушения и бортовой системы управления, а также из специального оборудования, в том числе бульдозера, расположенного в передней части кузова, монитора (пожарный носик) с системой видеонаблюдения и системой дистанционного управления для подачи огнетушащих веществ.
Известна роботизированная система с избирательной стыковкой (патент US 20180080307 A1), имеющая уравновешенную стабилизацию во время выполнения операции на подводной целевой структуре. Роботизированная система включает в себя первое подводное роботизированное транспортное средство, размеры и форма которого по меньшей мере частично окружают подводную целевую конструкцию. Второе подводное роботизированное транспортное средство имеет размеры и форму, чтобы, по меньшей мере, частично окружать подводную целевую конструкцию и выборочно стыковаться с первым подводным роботизированным транспортным средством. Первое и второе роботизированные транспортные средства включают в себя дополнительные стыковочные механизмы, которые позволяют транспортным средствам выборочно соединяться друг с другом с подводной целевой структурой, расположенной, по меньшей мере, частично между ними. Один робот включает в себя инструмент, который может воздействовать на целевую структуру, а другой робот включает в себя модуль стабилизации, который может воздействовать на целевую структуру противоположным образом, чтобы уравновесить силу инструмента.
Известна роботизированная транспортная платформа (патент RU 2506157 C1), содержащая самоходное управляемое транспортное средство с приводом и бортовыми источниками электропитания, пульт дистанционного управления, систему управления движением, систему связи и передачи данных, комплект функционального оборудования, систему технического зрения, приводы исполнительных механизмов, отличающаяся тем, что в качестве самоходного управляемого транспортного средства выбран колесный движитель повышенной проходимости с приводом от двигателя внутреннего сгорания, комплект функционального оборудования выполнен в виде боевого модуля для ведения стрельбы по различным видам целей в дневных и ночных условиях, содержащего поворотную платформу с системой наведения, блок управления и средство огневого поражения, линейные электродвигатели системы управления движением РТП электрически связаны с сервоусилителями и механически с правым и левым рулевыми механизмами, коробкой переключения передач, рычаг газа механически связан с сервомашинкой, система управления движением дополнительно оснащена ультразвуковыми датчиками обнаружения объектов, РТП дополнительно оснащен системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, информационно-вычислительной системой, состоящей из двух бортовых компьютеров и магистрально-модульной платформы, для выполнения вспомогательных операций PTП дополнительно оснащен аппаратурой для обеспечения резервной связи по каналам системы связи и передачи данных, система связи и передачи данных оснащена коммутатором и двумя маршрутизаторами для работы по основному и резервному каналам радиосвязи, сервоусилители, сервомашинка, ультразвуковые датчики обнаружения объектов системы управления движением, инерциальная система ориентации в пространстве, спутниковая навигационная система и одометры системы топопривязки и навигации, бортовая аппаратура транспортного средства – тахометр и спидометр, видеокамеры системы технического зрения по каналам информационного обмена связаны с информационно-вычислительной системой, электропитание систем РТП осуществляется от автономного источника, установленного на транспортном средстве.
Известна универсальная роботизированная платформа (патент RU 2639009 C1), содержащая бронированное гусеничное шасси с приводом, системой независимых индивидуальных подвесок и системой управления, оснащенной системой топопривязки и ориентирования, средства связи, пункт дистанционного управления и систему электропитания, систему предупреждения столкновений, пункт дистанционного управления, отличающаяся тем, что в состав универсальной роботизированной платформы включены две ТВ-камеры переднего обзора, составляющие стереоскопическую пару, и одна ТВ-камера заднего обзора, приводы левого и правого бортов платформы выполнены в виде независимых электроприводов на базе бесколлекторных трехфазных двигателей с редуктором и раздельными силовыми блоками управления, система независимых индивидуальных подвесок состоит из четырех обрезиненных катков по каждому борту, рычаги подвесок расположены «по ходу» платформы, газонаполненные амортизаторы со спиральными пружинами наклонены в противоположную сторону движения, средства связи состоят из двух каналов: канала управления и телеметрии, построенного на базе цифровых коротковолновых приемопередатчиков, и канала для передачи сигнала от трех ТВкамер, состоящего из устройства маскирования телевизионного сигнала и многоканального телевизионного передатчика, телеметрические данные, передаваемые от платформы, представляются по запросу двух типов: телеметрия по маске или телеметрия в полном объеме, программное обеспечение платформы состоит из двух уровней: уровень обеспечения сопряжения с аппаратными средствами и прикладной уровень, алгоритм управления движением при наличии следующих исходных данных: текущие координаты местоположения, текущее угловое положение платформы в пространстве, текущие скорости движения, заданные точки маршрута, разворот, параметры маршрута и команда пауза/старт, выполнен с возможностью получения следующих выходных данных: сигналы акселератора на правый и левый борта, направление движения левого и правого бортов, сигналы торможения двигателей, управление редукторами бортов и программный сигнал завершения движения, алгоритм выработки рассогласования бортов по скорости в зависимости от типа задания маршрута выполнен с возможностью реализации одним из двух способов: движение по кусочно-линейному маршруту или движение по гладкой траектории, пункт дистанционного управления состоит из двух рабочих мест: оператора универсальной роботизированной платформы и оператора, управляющего целевой нагрузкой, рабочее место оператора платформы, оснащенное персональной ЭВМ со средствами отображения, средствами связи с платформой, пультом управления движением платформы, обеспечивает доставку платформы в указанную точку, контроль движения платформы, контроль за состоянием приборов и подсистем платформы.
Известно мультиагентная робототехническая система (патент RU 2658684 С2), содержащая мобильные роботы с индивидуальными энергетическими установками, двигателями и движителями, по меньшей мере один летательный аппарат и искусственный спутник Земли, входящие в бортовую аппаратуру летательного аппарата системы воздушного слежения за роботами, получения информации от них и командного управления ими в составе приемопередатчика, формирователь изображения зоны действий, связанный с ним модуль планирования индивидуальных маршрутов роботов и входящие в бортовую аппаратуру роботов системы собственного управления и наблюдения, связанные посредством бортовых приемопередатчиков, к которым подключены блок сенсоров, контроллер управления бортовой аппаратурой и контроллер управления шасси, с системой воздушного слежения, информации и управления бортовых приемопередатчиков, отличающаяся тем, что она содержит мобильные роботы в виде беспилотных летательных аппаратов, сухопутных мобильных роботов, надводных мобильных роботов и подводных мобильных роботов, бортовая аппаратура которых дополнена блоком системы постановки помех, блоком систем обнаружения, блоком навигационных приемников, блоком передатчиков навигационных сигналов, блоком опознавания «свой-чужой», блоком командной радиолинии управления, связанной беспроводной связью с пультом управления, блоком приемопередатчиков связи, выполненным с возможностью осуществления взаимного слежения, обмена текущей информацией, определения относительных координат в трехмерном пространстве и их ретрансляции на по меньшей мере один летательный аппарат через бортовой приемопередатчик робота-посредника из числа мультиагентов, блоком инерциальной навигационной системы и блоком сенсоров, при этом в мобильных роботах блок системы постановки помех соединен с первым выходом контроллера управления бортовой аппаратурой, блок систем обнаружения соединен со вторым выходом контроллера управления бортовой аппаратурой, блок навигационных преемников соединен с третьим выходом контроллера управления бортовой аппаратурой, блок передатчиков навигационных сигналов соединен с четвертым выходом контроллера управления бортовой аппаратурой, блок системы опознавания «свой-чужой» соединен с пятым выходом контроллера управления бортовой аппаратурой, блок командной радиолинии управления соединен с пультом управления и шестым выходом контроллера управления бортовой аппаратурой, блок приемо-передатчиков связи соединен с седьмым выходом контроллера управления бортовой аппаратурой, блок инерциальной навигационной системы соединен с восьмым выходом контроллера управления бортовой аппаратурой, блок сенсоров соединен с девятым выходом контроллера управления бортовой аппаратурой, контроллер управления движением шасси соединен с десятым выходом контроллера управления бортовой аппаратурой.
Известен мобильный робототехнический комплекс (патент RU 2364500 С2), включающий мобильный робот, пост дистанционного управления, комплект дополнительного оборудования, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации, отличающийся тем, что он дополнительно снабжен выносной системой видеонаблюдения, мобильный робот дополнительно включает устройство доставки выносной системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, а комплект дополнительного оборудования – раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, – на другом конце.
Известен робототехнический комплекс (патент RU 2559194 С2), содержащий самоходное управляемое транспортное средство, пульт дистанционного управления, систему управления движением, систему навигации, включающую инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, систему связи и передачи данных, комплект специального оборудования, систему технического зрения, исполнительные механизмы, отличающийся тем, что система навигации робототехнического комплекса выполнена в виде двух блоков: блока локальной навигации и блока глобальной навигации, которые оснащены сенсорной подсистемой, блок локальной навигации выполнен с возможностью обработки входных данных от сенсорной подсистемы о препятствиях в ближнем поле зрения и выдачи команд по каналу связи на изменение направления и скорости движения в этом поле системе управления движением транспортного средства и данных о принятом решении для передачи на пульт дистанционного управления, блок глобальной навигации выполнен с возможностью обработки входных данных в виде команд с пульта дистанционного управления, данных для начальной привязки и определения текущих координат, дирекционного угла продольной оси робототехнического комплекса, данных для привязки робототехнического комплекса к шкале единого времени, данных для сохранения географических координат пройденного пути и их передачи оператору, данных для отображения маршрута движения на цифровой карте местности в реальном масштабе времени и выдачи данных о направлении и скорости движения на цифровой карте местности в реальном масштабе времени.
Известен автономный мобильный робототехнический комплекс (АМРК) (патент RU 2 632342 С2), содержащий транспортное средство, включающее герметичный корпус и надстройку, силовую, трансмиссионную установки и движитель, аппаратную часть и блок управления комплексом, отличающийся тем, что аппаратная часть включает в себя приборы мониторинга окружающей среды, навигационное оборудование и приборы контроля проходимости грунтовой поверхности, размещенные на надстройке транспортного средства, АМРК выполнен с возможностью смены движителя, на надстройке транспортного средства размещены выдвижная вращающаяся платформа, выдвижная мачта и выполнены люки, управляемые дистанционно, навигационное оборудование состоит из высокоточного мобильного приемника, устанавливаемого на АМРК и имеющего обратную связь с базовой станцией, приборы контроля проходимости грунтовой поверхности включают в себя дальномеры, контролирующие глубину колеи по каждому борту транспортного средства, гибкую консоль достаточной длины, на свободном конце которой закреплен измеритель твердости грунта с возможностью передачи показаний на блок управления, приборы мониторинга окружающей среды включают метеостанцию, судовую радиолокационную станцию, лазерный сканер, видеокамеры, соединенные с блоком управления, причем приборы мониторинга окружающей среды установлены на выдвижной мачте и выдвижной вращающейся платформе.
Наиболее близким по технической сущности к заявляемому устройству и выбранным в качестве прототипа является мобильный робот (патент RU 2454313 C2), содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами, платформу, три колеса, три колесных вала со смонтированными на них упомянутыми колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой, отличающийся тем, что он снабжен датчиком угла поворота второго колеса и датчиком скорости вращения второго колеса, кинематически связанными с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя, при этом в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, причем при использовании навигационных маркерных элементов в виде нанесенной на опорную плоскость светоконтрастной полосы автономная навигационная система выполнена с возможностью определения отклонения проекции точки середины передней кромки платформы робота на опорную плоскость от средней линии светоконтрастной полосы и отклонения продольной оси платформы робота от касательной к средней линии светоконтрастной полосы в указанной точке.
Основными недостатками существующих аналогов в предметной области является их узкая функциональная направленность, выраженная в решении задач с использованием мобильных роботов (робототехнических комплексов) только в определённых областях жизнедеятельности человека.
Техническая проблема, решение которой обеспечивается при использовании изобретения, заключается в необходимости расширения арсенала технических средств определенного назначения, а именно создании мобильной автономной робототехнической платформы с блочной изменяемой структурой, обеспечивающей конфигурирование робототехнических платформ различного функционального назначения без изменения конструкции и долговременных работ по улучшению той или иной характеристики устройства.
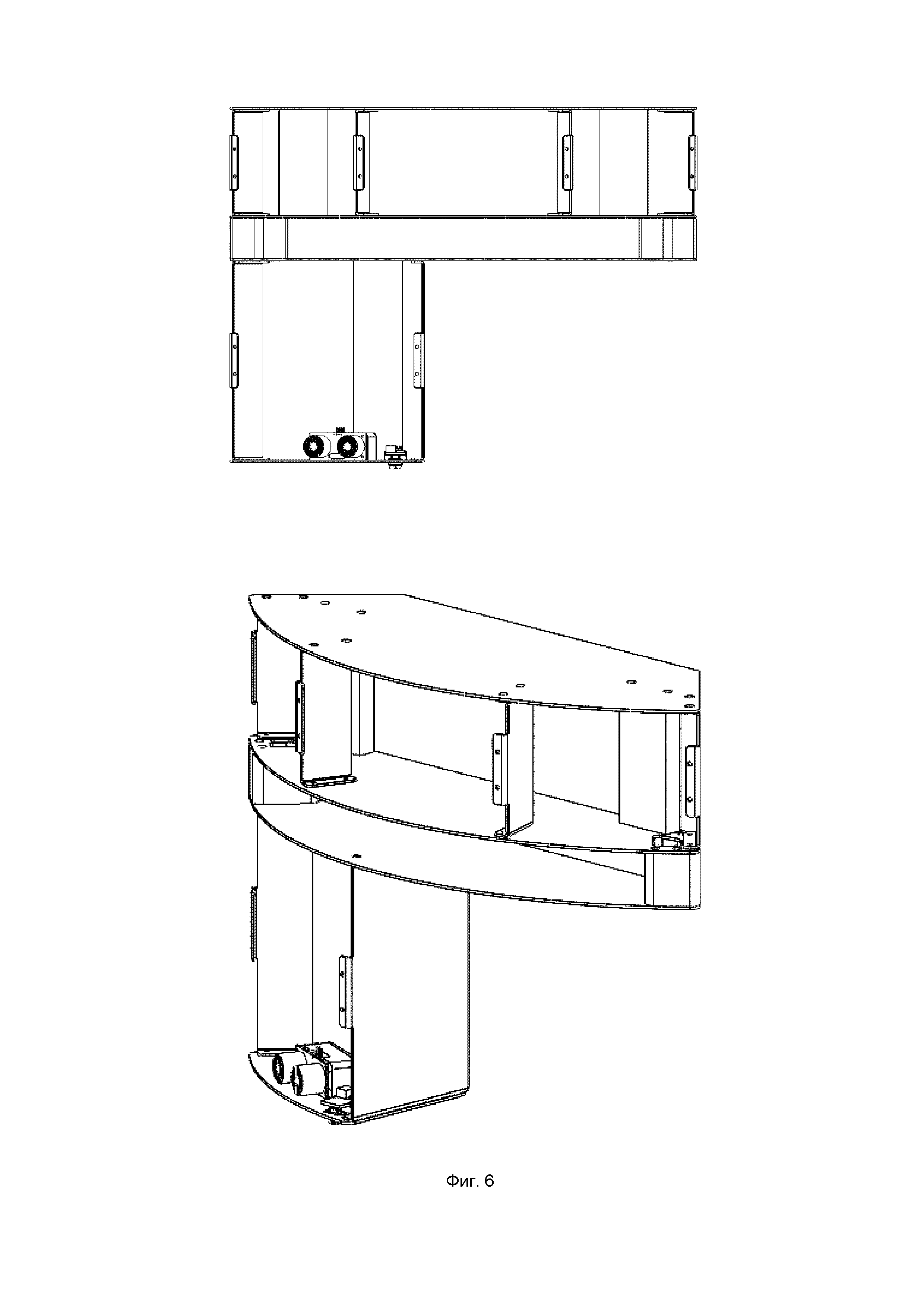
Навесной функциональный блок (200), устанавливаемый на верхнем уровне (130) базового блока (100) определяет назначение мобильной автономной робототехнической платформы в зависимости от пожеланий заказчика. Данный блок может представлять из себя манипулятор, кронштейн с сенсорным экраном, площадку для взаимодействия с БПЛА, емкость для полезного груза, различные рабочие инструменты, рекламный стенд, стереокамеры и т.д. Внешний вид и основное назначение навесного функционального блока зависит от заказчика и его пожеланий по назначению мобильной автономной робототехнической платформы с блочной изменяемой структурой (фиг. 6).
Данная техническая проблема решается тем, что в мобильную автономную робототехническую платформу с блочной изменяемой структурой, содержащую три колеса, три колесных вала со смонтированными на них упомянутыми колесами, три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик угла поворота второго колеса, датчик скорости вращения первого колеса, датчик скорости вращения второго колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, колесный вал второго колеса кинематически связан с выходным валом второго электродвигателя, датчиком угла поворота второго колеса и датчиком скорости вращения второго колеса, а оси колесных валов первого и второго колес лежат на одной прямой, при этом в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, дополнительно введены базовый и навесные блоки. При этом базовый блок выполнен в виде нижнего уровня, верхнего уровня и расположенного между ними подуровня для лазерного дальномера. При этом нижний уровень базового блока включает в себя основной несущий каркас, модуль шасси, источник питания, приемную часть беспроводного зарядного устройства и опорный модуль лазерного дальномера. При этом к нижней части нижнего уровня базового блока крепится модуль шасси, включающий в себя вышеупомянутые три колеса, три колесных вала со смонтированными на них упомянутыми колесами, три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик угла поворота второго колеса, датчик скорости вращения первого колеса, датчик скорости вращения второго колеса. Верхний уровень базового блока закреплен на нижнем уровне базового блока с помощью опорных стоек и включает в себя вычислительную сеть, гироскоп. При этом вычислительная сеть состоит из бортового компьютера, контроллера управления и коммуникационных шин, связывающих два электродвигателя, датчик угла поворота первого колеса, датчик угла поворота второго колеса, датчик скорости вращения первого колеса, датчик скорости вращения второго колеса, лазерный дальномер, гироскоп, бортовой компьютер и контроллер управления.
Кроме того, опорные стойки выполнены с возможностью размещения в них коммуникационных шин, связывающих нижний уровень и верхний уровень базового блока.
Кроме того, верхняя часть нижнего уровня базового блока крепится на петли и фиксируется с помощью защелок, опорный модуль лазерного дальномера закреплен на фиксирующихся салазках для облегчения доступа к устройствам нижнего уровня базового блока
Кроме того, навесные блоки выполнены с возможностью крепления к базовому блоку с использованием разъемных соединений типа "Ласточкин хвост".
Кроме того, навесные блоки могут быть установлены отдельно как на нижнем, так и на верхнем уровнях базового блока.
Кроме того, верхний уровень базового блока содержит дополнительные аккумуляторы для навесного блока верхнего уровня базового блока.
Заявляемое изобретение поясняется чертежами, на которых показаны:
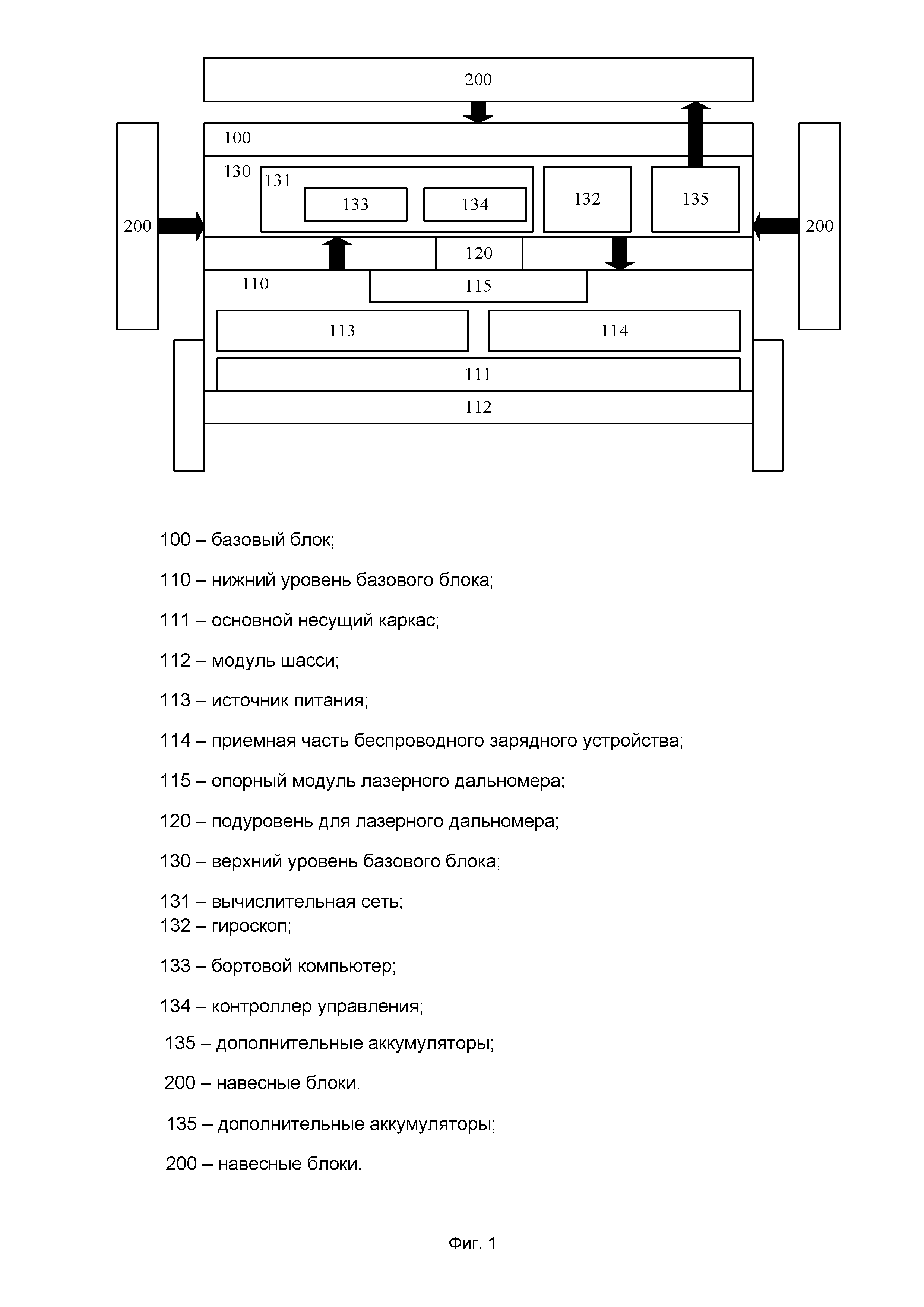
фиг. 1 – конфигурация мобильной автономной робототехнической платформы с блочной изменяемой структурой;
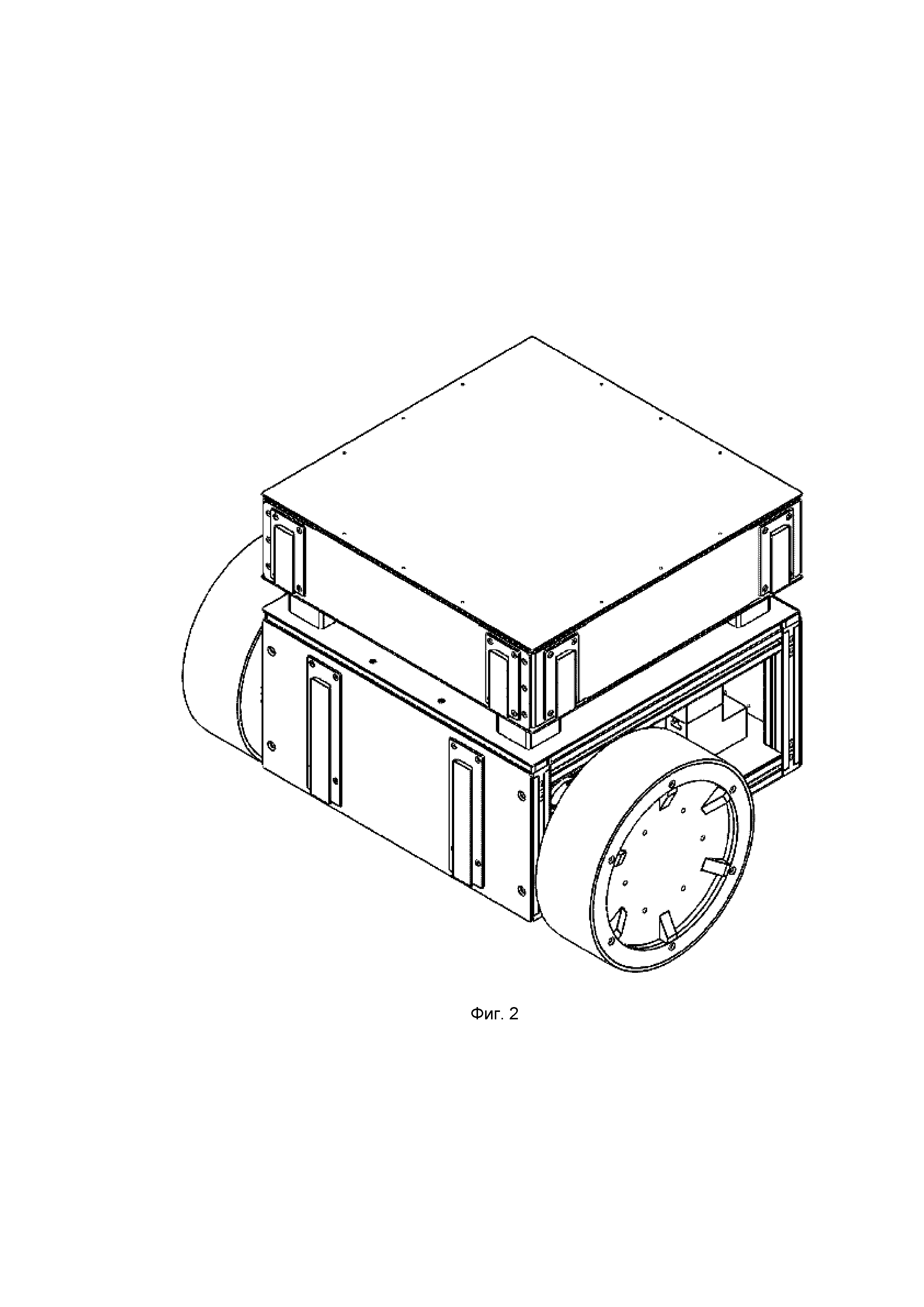
фиг. 2 – внешний вид базового блока мобильной автономной робототехнической платформы с блочной изменяемой структурой в изометрии;
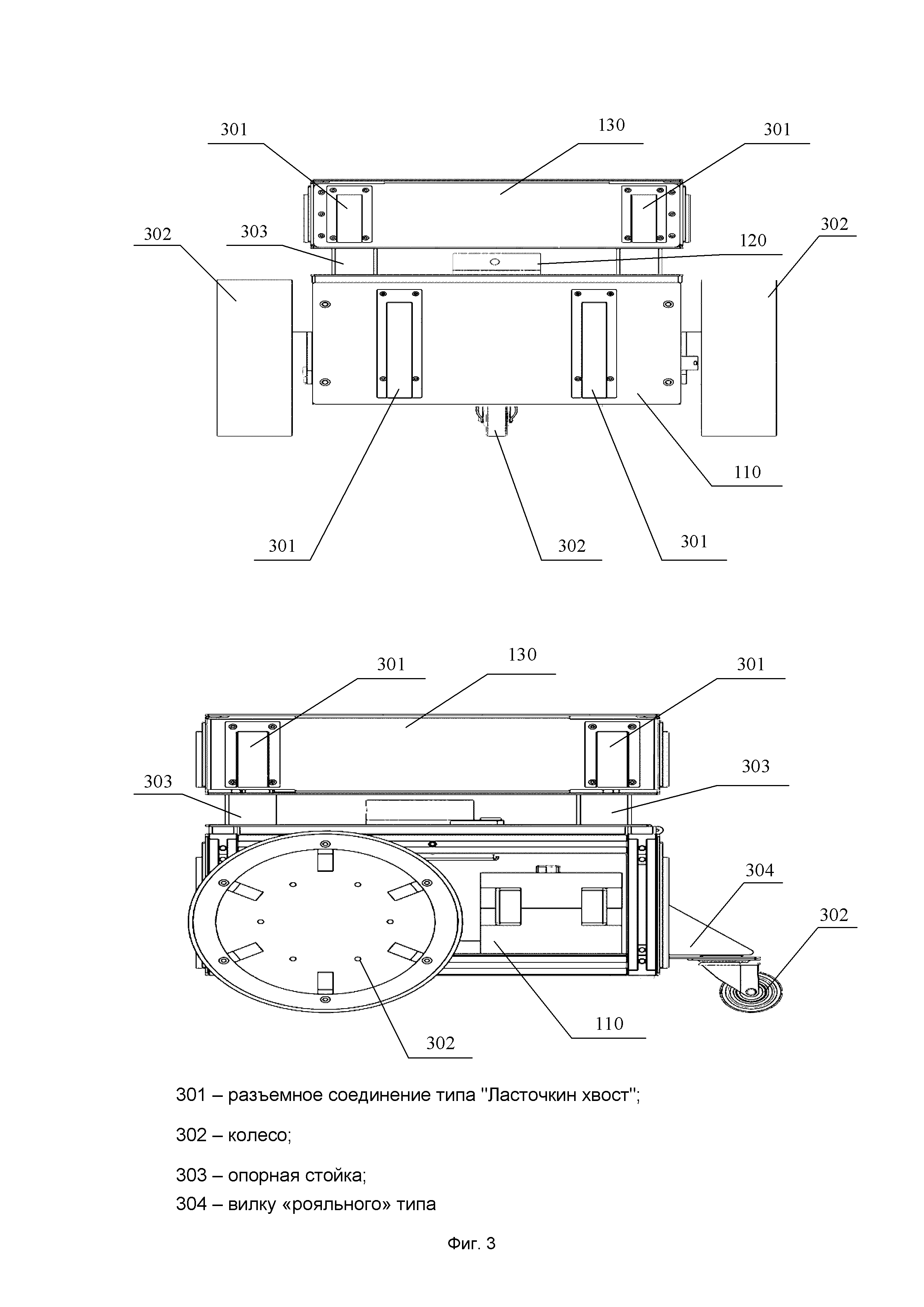
фиг. 3 – внешний вид базового блока мобильной автономной робототехнической платформы с блочной изменяемой структурой в двух проекциях;
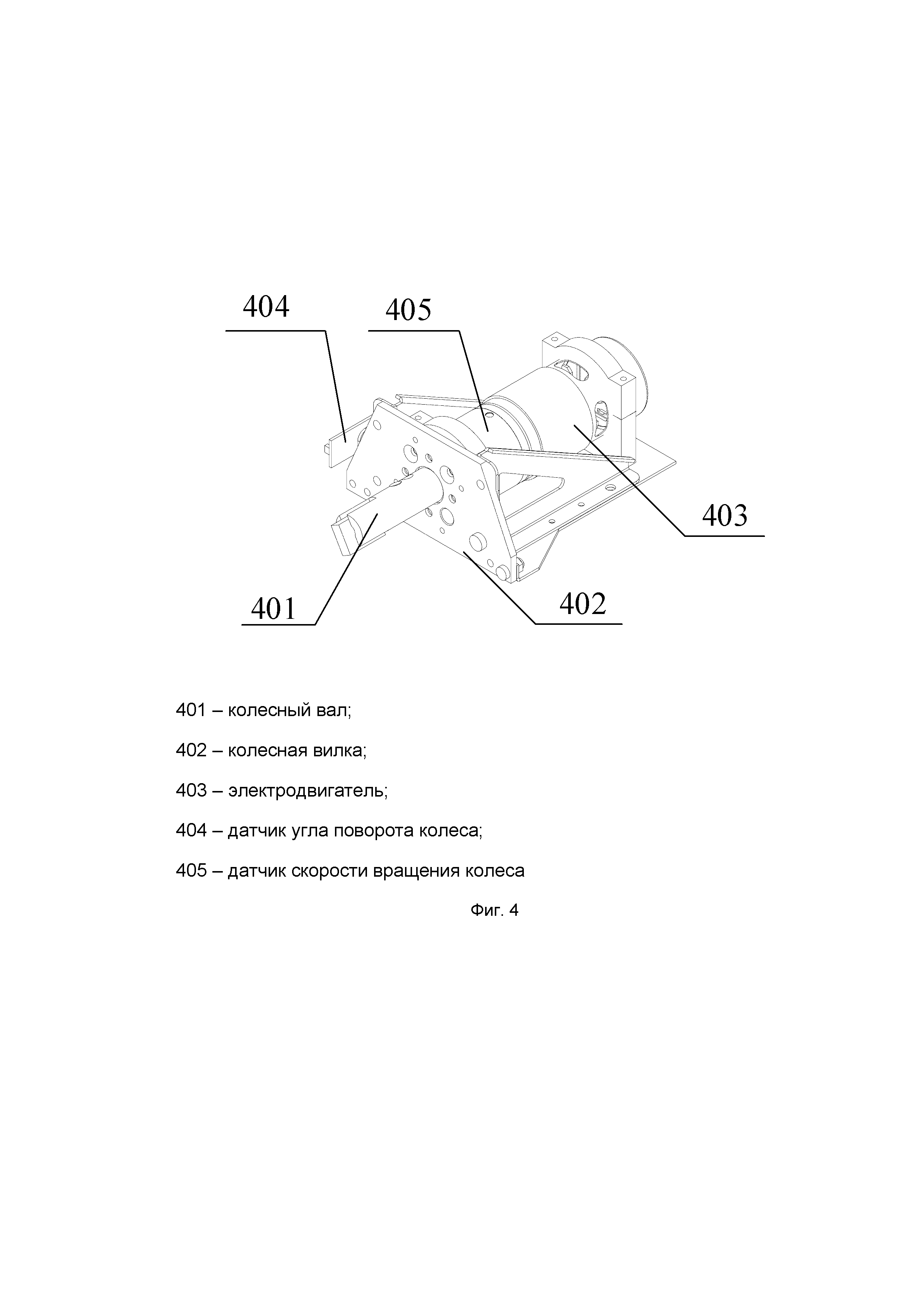
фиг. 4 – устройство модуля шасси мобильной автономной робототехнической платформы с блочной изменяемой структурой;
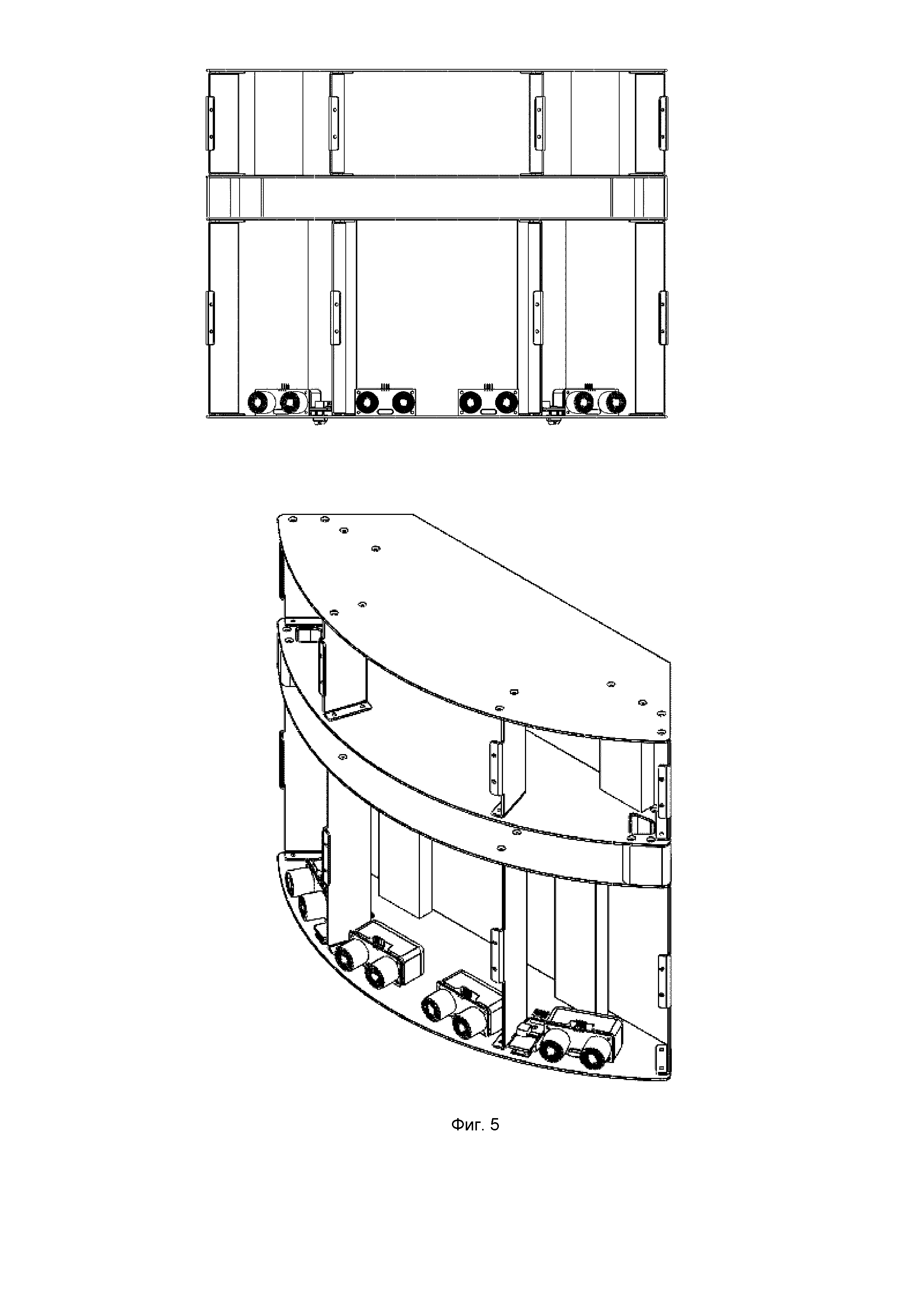
фиг. 5 – внешний вид фронтального (заднего) вспомогательного блока мобильной автономной робототехнической платформы с блочной изменяемой структурой в двух проекциях;
фиг. 6 – внешний вид бокового вспомогательного блока мобильной автономной робототехнической платформы с блочной изменяемой структурой в двух проекциях;
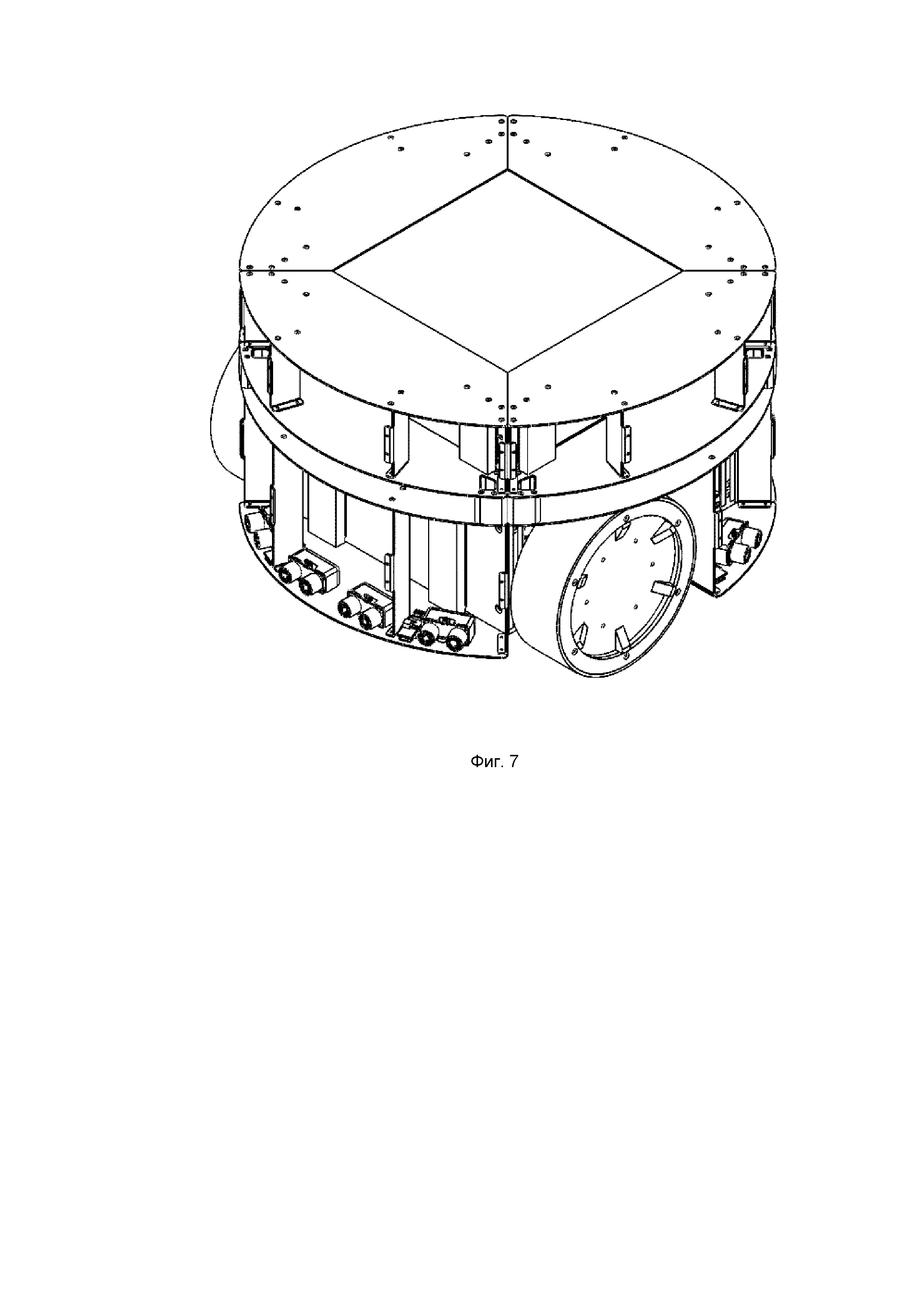
фиг. 7 – внешний вид мобильной автономной робототехнической платформы с блочной изменяемой структурой в изометрии.
Мобильная автономная робототехническая платформа с блочной изменяемой структурой (фиг. 1) состоит из базового (100) и навесных блоков (200).
Базовый блок (100) выполнен в виде нижнего уровня (110), верхнего уровня (130) и расположенного между ними подуровня для лазерного дальномера (120).
Нижний уровень (110) базового блока (100) включает в себя основной несущий каркас (111), модуль шасси (112), источник питания (113), приемную часть беспроводного зарядного устройства (114) и опорный модуль лазерного дальномера (115).
Верхний уровень (130) базового блока (100) закреплен на нижнем уровне (110) базового блока (100) с помощью опорных стоек и включает в себя вычислительную сеть (131), гироскоп (132), при этом вычислительная сеть (131) состоит из бортового компьютера (133), контроллера управления (134) и коммуникационных шин, связывающих два электродвигателя, датчик угла поворота первого колеса, датчик угла поворота второго колеса, датчик скорости вращения первого колеса, датчик скорости вращения второго колеса, лазерный дальномер (120), гироскоп (132), бортовой компьютер (133) и контроллер управления (134).
В качестве бортового компьютера (133) может использоваться производительный мини-компьютер Intel NUC [https://www.intel.ru/content/www/ru/ru/products/boards-kits/nuc.html], в качестве контроллера управления (134) – Arduino Mega [http://arduino.ru/Hardware/ArduinoBoardMega]. Бортовой компьютер отвечает за связь с другими устройствами, вывод изображения на экран (если установлен соответствующий навесной функциональный блок с экраном), обработку данных со всех датчиков (лазерный дальномер, гироскоп и датчики на навесных блоках), а также прием данных и формирование команд для контроллера управления, управляющего модулем шасси (112) и беспроводным зарядным устройством (114).
При этом к нижней части нижнего уровня (110) базового блока (100) крепится модуль шасси (112), включающий в себя (фиг. 3) три колеса (302), три колесных вала со смонтированными на них упомянутыми колесами, три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик угла поворота второго колеса, датчик скорости вращения первого колеса, датчик скорости вращения второго колеса.
При этом колесо (302) монтируется на колесный вал (401), соединенный с электродвигателем (403) через датчик скорости вращения колеса (405). Электродвигатель (403) закреплен на колесной вилке (402), к которой присоединен датчик угла поворота колеса (404). При этом колесный вал (401) первого колеса кинематически связан с выходным валом первого электродвигателя (403), датчиком угла поворота (404) первого колеса и датчиком скорости вращения (405) первого колеса. Колесный вал (401) второго колеса кинематически связан с выходным валом второго электродвигателя (403), датчиком угла поворота (404) второго колеса и датчиком скорости вращения (405) второго колеса, а оси колесных валов первого и второго колес лежат на одной прямой. В качестве колесной вилки третьего колеса используют вилку «рояльного» типа (304).
Кроме того, опорные стойки (303) выполнены с возможностью размещения в них коммуникационных шин, связывающих нижний уровень (110) и верхний уровень (130) базового блока (100).
Кроме того, верхняя часть нижнего уровня (110) базового блока (100) крепится на петли и фиксируется с помощью защелок, что позволяет поднять верхний уровень (130) базового блока (100) как капот. Опорный модуль лазерного дальномера (115) закреплен на фиксирующихся салазках для облегчения доступа к устройствам нижнего уровня (110) базового блока (100), в частности, к модулю шасси (112) и источнику питания (113).
Кроме того, навесные блоки (200) выполнены с возможностью крепления к базовому блоку (100) с использованием разъемных соединений типа "Ласточкин хвост" (301).
Навесные блоки (200) с дополнительным оборудованием (фиг. 5-6) разрабатываются как вспомогательное навигационное оборудование для более точного огибания препятствий. Помимо этого, имеется возможность разработки и установки на платформу навесных функциональных блоков для взаимодействия с окружающей средой: манипуляторы, экраны, стереокамеры, корзины для перевозки различных грузов и т.д.
Кроме того, навесные блоки (200) могут быть установлены отдельно как на нижнем (110), так и на верхнем уровнях (130) базового блока (100). Навесной функциональный блок (200), устанавливаемый на верхнем уровне (130) базового блока (100) определяет назначение платформы в зависимости от пожеланий заказчика. Данный блок может представлять из себя манипулятор, кронштейн с сенсорным экраном, площадку для взаимодействия с БПЛА, емкость для полезного груза, различные рабочие инструменты, рекламный стенд, стереокамеры и т.д. Внешний вид и основное назначение навесного функционального блока зависит от заказчика и его пожеланий по назначению мобильной многофункциональной платформы (фиг. 7). Связь с бортовым компьютером (133) осуществляется через контактные устройства Pogo Pin при присоединении навесного блока к базовому блоку (100).
Кроме того, верхний уровень (130) базового блока (100) содержит дополнительные аккумуляторы (135) для навесного блока (200) верхнего уровня (130) базового блока (100).
Таким образом, указанные отличительные особенности мобильной автономной робототехнической платформы с блочной изменяемой структурой обеспечивают конфигурирование робототехнических платформ различного функционального назначения без изменения конструкции и долговременных работ по улучшению той или иной характеристики устройства при минимальных временных и стоимостных затратах. При этом модификация мобильной автономной робототехнической платформы под новое назначение обеспечивается заменой отдельных навесных блоков.
Проведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленной мобильной автономной робототехнической платформы с блочной изменяемой структурой, отсутствуют, поэтому изобретение соответствует условию патентоспособности "Новизна".
Результаты поиска известных решений в данной и смежной областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявляемого изобретения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения на достижение указанного технического результата. Следовательно, заявленной изобретение соответствует условию патентоспособности "Изобретательский уровень".
Устройство для определения оптимального периода контроля и управления техническим состоянием изделия
Устройство для определения надежностных и эксплуатационно-технических характеристик изделия
Устройство для определения оптимального времени подготовки средств системы к применению
Цифровой биометрический комплекс оценки функционального состояния пилота воздушного судна
Устройство поиска информации
Беспроводная зарядная система
Способ определения опасных состояний на дорогах общего пользования на основе мониторинга ситуации в кабине транспортного средства
Устройство для прогнозирования случайных событий
Магнитно-механическое устройство соединения модульных конструкций
Способ распознавания речи на основе двухуровневого морфофонемного префиксного графа
Способ бесконтактного управления курсором мыши
Способ распределения задач между сервисными роботами и средствами киберфизического интеллектуального пространства при многомодальном обслуживании пользователей
Способ приготовления соевых белковых продуктов
Способ получения белково-витаминно-минерального концентрата
Способ приготовления соевых белковых продуктов
Беспроводная зарядная система
Магнитно-механическое устройство соединения модульных конструкций
Способ реабилитации пациента с нарушениями функций опорно-двигательного аппарата
Беспилотный летательный аппарат для транспортировки компонентов крови

