Результат интеллектуальной деятельности: УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДЛИТЕЛЬНОСТИ ИНТЕРВАЛА СОПРОВОЖДЕНИЯ ЦЕЛИ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях разведки огневых позиций противника (РЛС РОП).
В радиолокационных станциях разведки огневых позиций противника осуществляется автосопровождение (АС) летящего снаряда (цели) в течение некоторого времени, когда производится измерение его текущих координат на траектории. После окончания АС производится обработка полученных координат и путем экстраполяции наблюдаемого участка траектории в точку вылета определяются координаты стреляющего орудия.
Таким образом, перед разработчиками РЛС РОП встает важный вопрос выбора величины времени наблюдения (длительности интервала сопровождения) за летящим снарядом (целью). От этой величины зависят:
1. Точность определения координат огневой позиции (ОП).
2. Скрытность работы РЛС.
3. Пропускная способность РЛС.
Известен ряд технических решений этого вопроса, в том числе использование таблицы зависимости времени сопровождения снаряда от дальности наблюдения и его скорости полета. При этом не учитывается ни качество радиолокационного сопровождения, ни вид траектории, ни положение наблюдаемого участка на траектории.
В техническом решении, подтвержденном авторским свидетельством №300168 «Устройство определения длительности интервала сопровождения артиллерийских снарядов» [5], учитывается качество АС. Указанное решение рассматривается как прототип.
В прототипе при радиолокационном АС снарядов на траектории производится преобразование измеряемых координат из аналоговой формы в цифровую в устройстве АЦП, затем выполняется рекуррентное сглаживание (оценивание) полиномом второй степени измеренных РЛС координат и экстраполяция их на шаг вперед для установки луча в экстраполированную точку. Получаемые при этом в устройстве-прототипе текущие сглаженные прямоугольные координаты (Xt, Yt, Ht) и текущие сглаженные скорости по этим координатам (Vxt, Vyt, Vht) используются для решения поставленной задачи.
Для этого на каждом i-том шаге съема координат:
- определяется время экстраполяции (Тэi) сопровождаемого снаряда с высоты Hti до точки вылета (до Н=0):

где q - ускорение свободного падения (q=9,81 м/с2);
- определяются координаты точки вылета снаряда:

- после i=10 (минимально допустимое число точек АС) выполняется анализ разницы значений координат точки вылета снаряда на полученном i-том и на предыдущем (i-1) шагах:

- проверяются условия:  где ПОРх и ПОРу - заданные пороги.
где ПОРх и ПОРу - заданные пороги.
Сопровождение снаряда продолжается и все вычисления, и анализ по формулам (1)-(4) повторяются до тех пор, пока на каком-то i-том шаге (i≥10) съема координат условие (4) будет не выполнено, т.е. значения |Δxi| и |Δyi| не станут меньше заданных порогов. В этом случае вырабатывается команда «сброс АС» и автосопровождение снаряда прекращается.
Признаком окончания автосопровождения является установившийся процесс АС, когда экстраполированные значения координат в каждом такте наблюдения отличаются друг от друга в заданных пределах.
На фиг. 1 представлена блок-схема устройства определения длительности интервала сопровождения артиллерийских снарядов, являющегося прототипом, где:
1. АЦП;
2. Блок сглаживания;
3. Первый цифровой коммутатор;
4. Блок экстраполяции полиномом второй степени;
5. Второй цифровой коммутатор;
6. Линия задержки;
7. Цифровой сумматор;
8. Цифровой компаратор;
9. Блок сглаживания экстраполированных координат;
10. Третий цифровой коммутатор;
11. Синхронизатор.
Данное устройство содержит последовательно соединенные АЦП 1, блок сглаживания 2, первый цифровой коммутатор 3, блок экстраполяции полиномом второй степени 4, второй цифровой коммутатор 5, цифровой сумматор 7, цифровой компаратор 8, блок сглаживания экстраполированных координат 9, третий цифровой коммутатор 10, при этом второй цифровой коммутатор 5 своим вторым выходом, объединенным с выходом блока сглаживания экстраполированных координат 9, соединен через линию задержки 6 с вторым инверсным входом цифрового сумматора 7, а своим третьим выходом, объединенным с вторым выходом первого цифрового коммутатора 3 и вторым выходом третьего цифрового коммутатора 10, образует общий выход «Продолжение АС» устройства съема координат, а первый выход цифрового компаратора 8 объединен с первым выходом третьего цифрового коммутатора 10, образуя общий выход «Сброс с АС» устройства сопровождения, синхровходы 1, 2 и 3 цифровых коммутаторов 3, 5 и 10 подсоединены к синхронизатору 11.
К недостаткам прототипа относится следующее. С развитием современной техники качество автосопровождения повышалось, увеличивалась дальность сопровождения снарядов, что приводило к сопровождению на больших дальностях траекторий от снарядов с малыми углами выстреливания (настильных траекторий).
Как показал опыт, улучшение качества автосопровождения привело к уменьшению времени на установление переходного процесса при автосопровождении когда экстраполированные значения координат в каждом такте наблюдения начинают отличаться друг от друга в заданных пределах и, следовательно, уменьшается длительность интервала сопровождения цели на траектории (величина времени наблюдения - Тн).
Поэтому использование устройства-прототипа, привело к снижению времени автосопровождения, что в свою очередь ухудшило точность определения координат огневых позиций стреляющих систем, являющуюся основной характеристикой РЛС. Это объясняется тем, что обработка настильных траекторий (малый угол наклона вектора скорости снаряда к плоскости горизонта), траекторий на большой дальности полета от РЛС требует большего времени сопровождения (количества точек АС) для увеличения точности определения координат ОП при дальнейшей вторичной обработке.
Целью изобретения является возможность при определении длительности АС учитывать дополнительные признаки, позволяющие точнее определить время, необходимое для наблюдения за целью, что приводит к повышению точности определения координат ОП.
Поставленная цель данного изобретения достигается тем, что в заявленном устройстве определения длительности интервала сопровождения, в отличие от прототипа, используются дополнительные признаки, позволяющие определить время, необходимое для автосопровождения цели. Такими признаками являются: качество радиолокационного сопровождения, определяемое по величине измеряемого при АС соотношения сигнал-шум, дальности РЛС - снаряд, а также значение текущего угла наклона вектора скорости снаряда к плоскости горизонта на участке АС.
Возможность выполнения поставленной цели объясняется тем, что эти введенные признаки учитывают все основные факторы, влияющие на получение необходимого времени наблюдения (числа измерений координат) снаряда на траектории.
Проведенные патентные исследования не позволили выявить заявляемую совокупность признаков, обеспечивающих определение длительности АС во время автосопровождения объекта на траектории, что предположительно позволяет сделать вывод о соответствии заявляемого технического решения критериям «новизна» и «существенные отличия».
Более подробно сущность изобретения состоит в следующем.
Получаемые во время АС прямоугольные координаты (Х, У, Н) и дальность РЛС-снаряд (Д) после АЦП, как и в прототипе, оцениваются полиномом 2-го порядка [4] для получения текущих сглаженных координат (Xt, Yt, Ht) и скоростей (Vxt, Vyt, Vht).
После чего определяется величина текущего времени сопровождения цели Tti:

где i - номер текущего шага AC, Δt - шаг съема координат.
Далее номер текущего шага i сравнивается с величиной Ny - число точек АС, после которого переходный процесс становится установившимся. Величина Ny зависит от конкретной РЛС, как правило для современных РЛС РОП Ny=6.
- если i<Ny осуществляется продолжение АС без определения требуемого времени наблюдения Тн;
- если i=Ny, в данной точке определяется время Тн, необходимое для наблюдении за сопровождаемой целью, для чего предварительно вычисляются параметры, используемые для определения Тн:
1) текущий угол наклона вектора скорости снаряда относительно плоскости горизонта (Θтек), определяемый по формуле:

где VhtNy, VxtNy и VytNy скорости, получаемые в процессе АС при оценивании полиномом 2-го порядка в точке i=Ny;
2) ошибка измерения дальности [6] (σДизм), получаемая в точке i=Ny по формуле:

где с - скорость света,
τ - длительность излучаемого импульса (сжатого),
KN - нормированная крутизна дискриминаторной характеристики (определяется экспериментально для каждой РЛС, для РЛС РОП KN=1,7)
S/N - величина соотношения сигнал/шум на выходе системы первичной обработки.
Время, необходимое для наблюдения за целью (длительность интервала АС)
- Тн, определяется по следующей эмпирической формуле, полученной авторами:

где Д- текущая дальность РЛС - снаряд [км],
Θтек - угол наклона вектора скорости снаряда относительно плоскости горизонта [рад],
σДрлс - расчетная (априорная) среднеквадратическая погрешность измерения дальности конкретной РЛС, как правило для РЛС РОП σДрлс=3÷5 м.
- если i>Ny, на каждом шаге АС осуществляется анализ времени Tti:.
если Tti≥Тн, выполняется сброс с АС, в противном случае - выполняется продолжение АС.
На этом работа заявляемого устройства завершается.
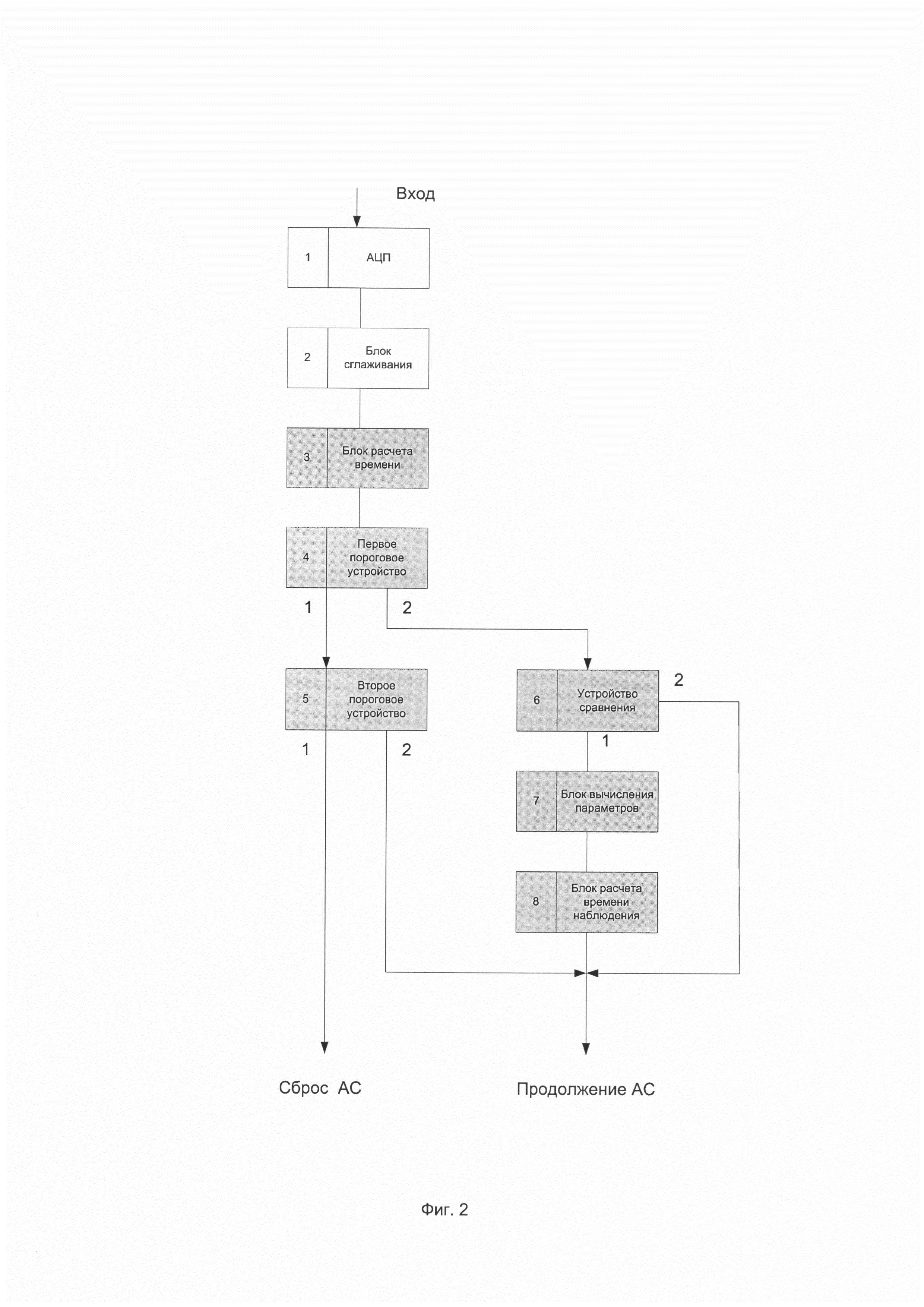
На фиг. 2 представлена блок-схема заявляемого устройства определения длительности интервала сопровождения при наблюдении за целью во время радиолокационного автосопровождения где:
1 - АЦП;
2 - блок сглаживания;
3 - блок расчета времени;
4 - первое пороговое устройство;
5 - второе пороговое устройство;
6 - устройство сравнения;
7 - блок вычисления параметров;
8 - блок расчета времени наблюдения.
Заявляемое устройство определения длительности интервала сопровождения, содержащее последовательно соединенные блок АЦП 1, блок сглаживания 2 и отличающееся тем, что в него введены последовательно соединенные блок расчета времени 3, первое пороговое устройство 4, первый выход которого соединен с входом второго порогового устройства 5, первый выход которого образует общий выход «Сброс АС» устройства определения длительности интервала сопровождения, а второй выход первого порогового устройства 4 соединен с входом устройства сравнения 6, первый выход которого соединен с входом блока вычисления параметров 7, выход которого соединен с входом блока расчета времени наблюдения 8, выход которого объединен со вторыми выходами второго порогового устройства 5 и устройства сравнения 6 и образует второй общий выход «Продолжение АС» устройства определения длительности интервала сопровождения.
Заявляемое устройство определения длительности интервала сопровождения работает следующим образом.
С блока 1 АЦП, где поступающие на его вход сигналы оцифровываются и в виде значений измеренных прямоугольных координат и дальности (X, У, Н и Д) в результате радиолокационного сопровождения цели на траектории, поступают в блок сглаживания 2. В блоке сглаживания 2 прямоугольные координаты и дальность РЛС-снаряд оцениваются полиномом 2-го порядка [4], в результате чего получаются оценки скоростей в каждой точке AC (Vxt, Vyt, Vнt).
Далее в блоке расчета времени 3 определяется величина текущего времени сопровождения цели Tti по формуле (5). Затем в первом пороговом устройстве 4 анализируется порядковый номер шага АС - i, который сравнивается с величиной Ny - число точек АС, после которого переходный процесс считается установившимся.
При i≤Ny через второй выход первого порогового устройства 4 подключается вход устройства сравнения 6, где производится следующий анализ:
- если i<Ny, необходимо продолжить АС цели до достижения окончания переходного процесса, когда i=Ny. Для этого второй выход устройства сравнения 6 подсоединен непосредственно к выходу блока расчета времени наблюдения 8 - т.е. осуществляется продолжение АС.
- если i=Ny, переходный процесс окончен, выполняется определение времени наблюдения. Для этого первый выход устройства сравнения 6 подсоединен к входу блока вычисления параметров 7, где предварительно определяется по формуле формуле (6) текущий угла наклона вектора скорости снаряда относительно плоскости горизонта Θтек, и ошибка измерения дальности - σДизм, вычисляемая по формуле (7). Далее в блоке расчета времени наблюдения 8 определяется длительность интервала наблюдения Тн, необходимая для наблюдения за целью по формуле (8). После чего выход блока расчета времени наблюдения 8, объединенный со вторым выходом устройства сравнения 6 и вторым выходом второго порогового устройства 5 подсоединен к второму выходу устройства определения длительности интервала сопровождения при наблюдении за целью, т.е. осуществляется продолжение АС.
При i>Ny, через первый выход порогового устройства 4 подключается вход второго порогового устройства 5, в котором осуществляется анализ текущего времени Tti на каждом i - том шаге АС путем сравнения его с вычисленным временем наблюдения Тн:
- если Tti<Тн - необходимо продолжать АС. Для этого второй выход второго порогового устройства 5 объединен с вторым выходом устройства сравнения 6 и выходом блока расчета времени наблюдения 8 и образует общий выход «Продолжение АС» устройства определения длительности интервала сопровождения и является его вторым информационным выходом, после чего осуществляется переход на продолжение АС.
- если Tti≥Тн - необходимо прекращение АС. Для этого первый выход второго порогового устройства 5 подсоединен к первому выходу «Сброс АС» устройства определения длительности интервала сопровождения при наблюдении за целью и является его первым информационным выходом, после чего осуществляется переход на сброс с АС.
На этом выполнение работы устройства определения длительности интервала сопровождения за целью во время АС завершается.
Технический результат - возможность определения необходимого времени наблюдения за целью непосредственно во время сопровождения цели на траектории ее полета.
Посредством математического моделирования было установлено:
- работоспособность предлагаемого устройства;
- преимущество перед прототипом: учитывается не только качество АС, но и параметры траектории конкретного наблюдаемого объекта
Литература
1. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М, Радио и связь, 1986, стр. 17, 172-173.
2. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., Сов. радио, 1974, стр. 373-374.
3. Ильчук А.Р., Канащенков А.И., Меркулов В.И. и др. Алгоритмы автоматического радиолокационного сопровождения целей в режиме обзора. М Радиотехника №11, 1999 год, стр. 3-20.
4. Амиантов И.Н., Избранные вопросы статистической теории связи, «Советское радио» 1971. - 416 с. стр. 142-144.
5. Исаева Н.П., Водилов В.В., Гришкин В.А., Куценко О.Г., АС №300168, «Устройство определения длительности интервала сопровождения артиллерийских снарядов» с приоритетом 10.06.1988 г.
6. Бартон Д., Вард Г., Справочник по радиолокационным измерениям. М. Сов. радио, 1976 год, стр. 62-102.
Устройство определения длительности интервала сопровождения цели, содержащее последовательно соединенные блок аналого-цифрового преобразования (АЦП) и блок сглаживания, отличающееся тем, что в него введены последовательно соединенные блок расчета времени, первое пороговое устройство, первый выход которого соединен с входом второго порогового устройства, первый выход которого образует общий выход «Сброс автосопровождения (АС)» устройства определения длительности интервала сопровождения, второй выход первого порогового устройства соединен с входом устройства сравнения, первый выход которого соединен с входом блока вычисления параметров, выход которого соединен с входом блока расчета времени наблюдения, выход которого объединен со вторыми выходами второго порогового устройства и устройства сравнения и образует второй общий выход «Продолжение АС» устройства определения длительности интервала сопровождения цели, при этом блок АЦП предназначен для оцифровывания сигналов, поступивших на его вход в виде значений измеренных прямоугольных координат цели и дальности до нее в результате радиолокационного сопровождения цели на траектории, блок сглаживания предназначен для оценки скоростей цели в каждой точке АС, блок расчета времени предназначен для определения величины текущего времени сопровождения цели Tti, первое пороговое устройство предназначено для сравнения порядкового номера шага АС - i с величиной Ny числа точек АС, блок расчета времени наблюдения предназначен для вычисления длительности интервала наблюдения за целью Тн, второе пороговое устройство предназначено для анализа текущего времени Tti на каждом i-том шаге АС путем сравнения его с вычисленным временем наблюдения за целью Тн, блок вычисления параметров предназначен для вычисления текущего угла наклона вектора скорости цели относительно плоскости горизонта и ошибки измерения дальности, устройство сравнения предназначено для принятия решения «Продолжение АС» при i ≤ Ny, если i < Ny, или определение времени наблюдения, если i=Ny, причем, при i > Ny, если Tti < Тн, принимается решение «Продолжение АС», если Tti ≥ Тн, принимается решение «Сброс АС».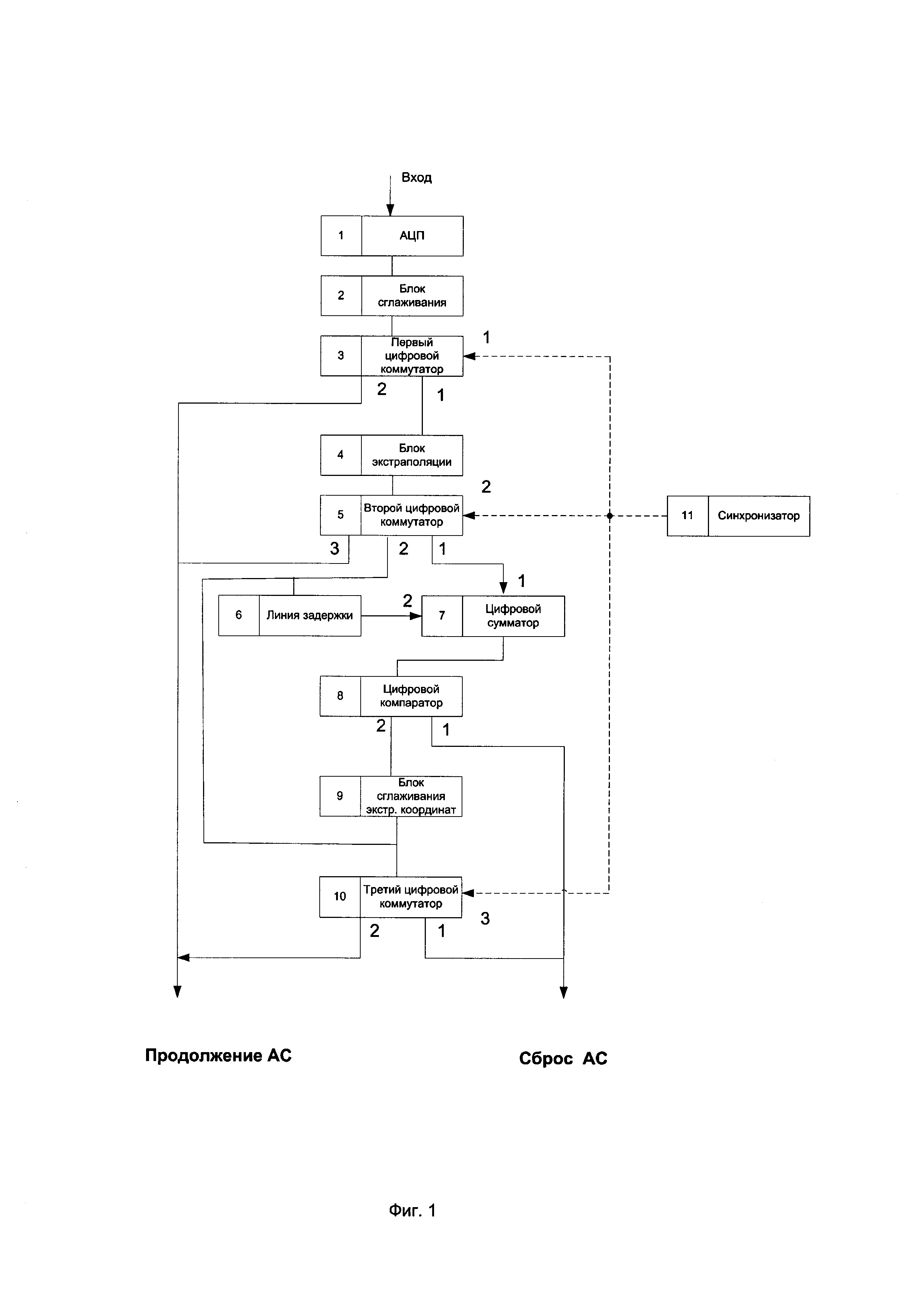
Способ пеленгования с повышенной разрешающей способностью
Модуль бесперебойного питания потребителей постоянного тока
Дренажно-предохранительный клапан
Космический аппарат дистанционного зондирования земли
Клапан для регулирования расхода горячего газа
Противопехотная осколочная мина дистанционной установки
Разъемное соединение
Газораспределительный клапан
Блок приема и синхронизации
Теплообменный аппарат
Устройство распознавания стреляющих систем
Устройство распознавания стреляющих систем
Устройство распознавания целей, не являющихся объектами разведки

