Результат интеллектуальной деятельности: УСТРОЙСТВО ПОМОЩИ ВОДИТЕЛЮ
Вид РИД
Изобретение
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники
[0001] Изобретение относится к устройству помощи водителю.
2. Раскрытие предшествующего уровня техники
[0002] Устройство подобного типа предложено в японской патентной заявке № 2016-099953 (JP 2016-099953 A), не прошедшей экспертизу. Например, когда направление движения установлено односторонним для зоны проезда по ширине одного транспортного средства на парковочной площадке, устройство позволяет автоматически управлять транспортным средством. В альтернативном варианте предложена система для парковочной площадки (см. WO 2016/066350). В системе для парковочной площадки каждое парковочное место оснащается индикатором, указывающим информацию о доступности парковочного места. В альтернативном варианте предложена система (см. патентную заявку № DE 102015201204). Эта система отслеживает движение транспортного средства на парковочной площадке, используя датчики, скрытые под зонами проезда парковочной площадки, и контролирует движение транспортного средства на парковочной площадке. В качестве альтернативы предложена система (см. японскую патентную заявку № 2006-031412 (JP 2006-031412 A), не прошедшую экспертизу). В этой системе при движении транспортного средства, маршрут вплоть до положения остановки транспортного средства на свободном парковочном месте передается из центра управления парковкой транспортному средству, заехавшему на парковочную площадку, и транспортное средство движется по маршруту движения под автоматическим управлением.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В частности, на парковочной площадке есть вероятность, что пешеход может выбежать из-за припаркованного транспортного средства. В вышеописанном уровне техники возможность того, что пешеход выбежит, не рассматривается.
[0004] Изобретением предложено устройство помощи водителю, способное оказывать помощь при вождении с учетом вероятности, того что пешеход выбежит на парковочной площадке.
[0005] Устройство помощи водителю, описываемое первым аспектом изобретения, содержит: средства сбора информации, выполненные с возможностью получения информации о доступности парковочных мест, указывающей, занято или свободно каждое из множества парковочных мест на парковочной площадке; и средства настройки, выполненные с возможностью задания, по меньшей мере, либо скорости транспортного средства, перемещающегося по парковочной площадке, либо маршрута движения транспортного средства на основании информации о доступности парковочных мест.
[0006] Устройство помощи водителю в соответствии со вторым аспектом изобретения, содержит: по меньшей мере, один электронный блок управления, выполненный с возможностью: получения информации о доступности парковочных мест, указывающую на парковочную ситуацию для каждого из множества парковочных мест на парковочной площадке; задания, по меньшей мере, либо скорости транспортного средства, перемещающегося по парковочной площадке, либо маршрута движения транспортного средства на основе информации о доступности парковочных мест; и управления приводом таким образом, чтобы транспортное средство двигалось в режиме автоматического рулевого управления, на основе, по меньшей мере, либо скорости, либо маршрута движения.
[0007] В этом аспекте скорость транспортного средства или маршрут движения устанавливают на основе информации о доступности парковочных мест. Парковочная ситуация, указываемая посредством информации о доступности парковочных мест, учитывает вероятность того, что пешеход выбежит из-за припаркованного транспортного средства. То есть, если число припаркованных транспортных средств достаточно велико, существует достаточно большое число слепых зон, обусловленных припаркованными транспортными средствами, поэтому водителю подразумеваемого транспортного средства трудно обнаружить пешехода, и существует высокая вероятность того, что пешеход выбежит, не заметив транспортное средство. С другой стороны, если число припаркованных транспортных средств относительно невелико, существует относительно небольшое число слепых зон, обусловленных припаркованными транспортными средствами, поэтому как водителю подразумеваемого транспортного средства, так и пешеходу относительно легко заметить друг друга. Поэтому, согласно вышеизложенному аспекту, учитывающему информацию о доступности парковочных мест, имеется возможность оказывать помощь в вождении с учетом того, что пешеход выбежит из-за припаркованного транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Отличительные признаки, преимущества, техническая и промышленная значимость примерных вариантов осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам, и на которых:
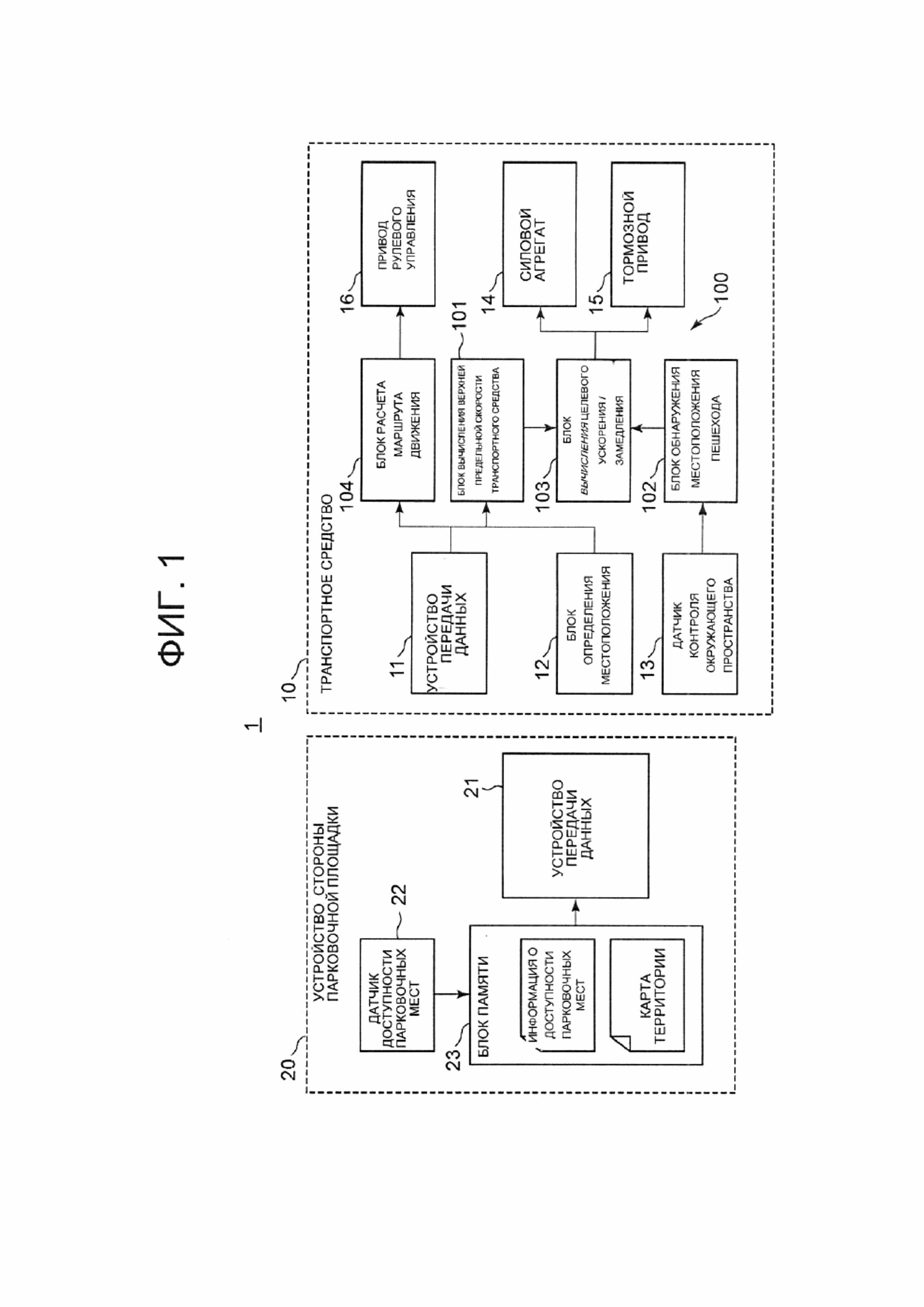
На ФИГ. 1 изображена структурная схема, демонстрирующая конфигурацию системы парковки в соответствии с первым вариантом осуществления изобретения.
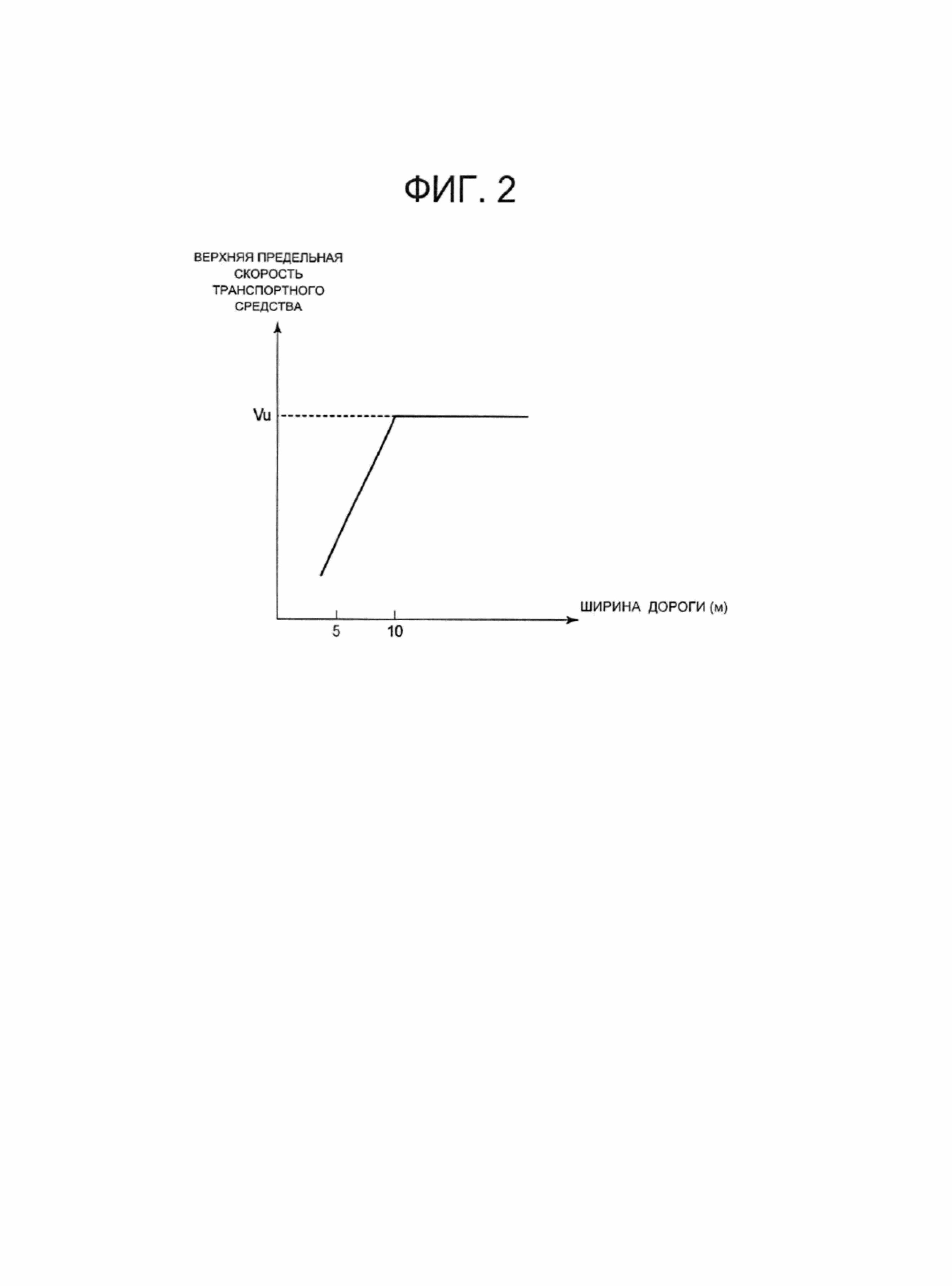
На ФИГ. 2 изображен график, показывающий пример соотношения ширины дороги и базовой верхней предельной скорости транспортного средства.
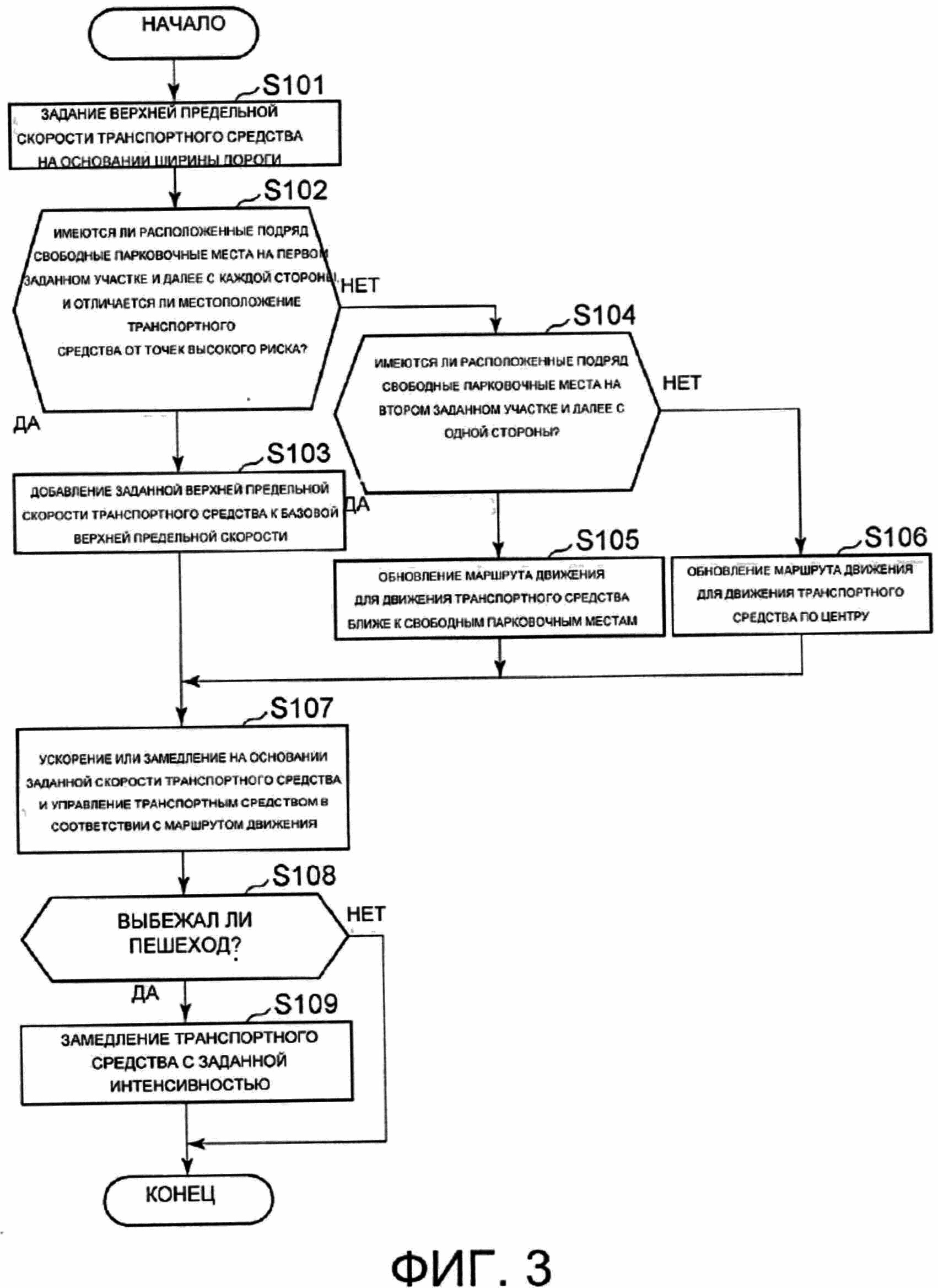
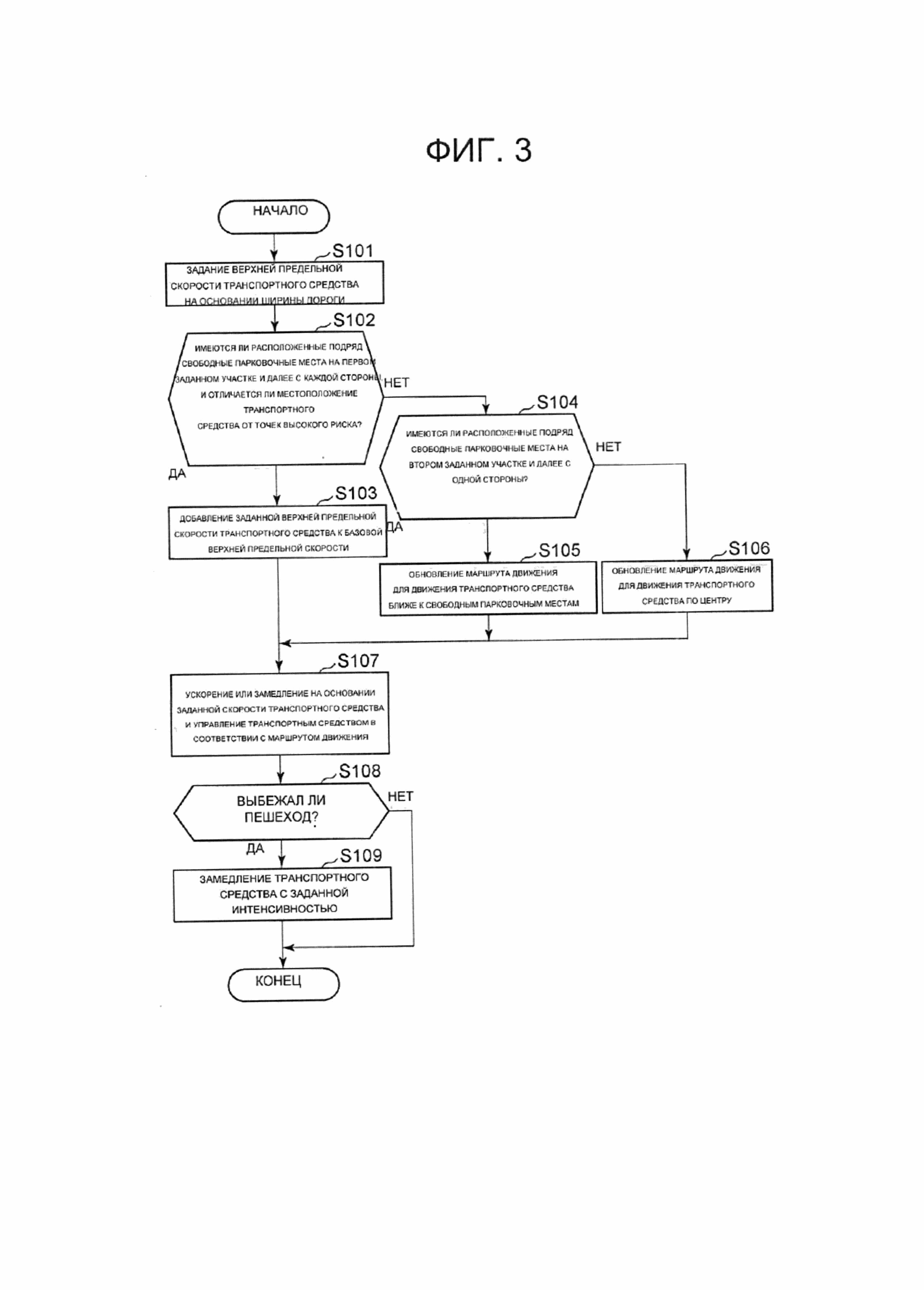
На ФИГ. 3 изображена блок-схема последовательности операций, показывающая процесс осуществления помощи водителю в соответствии с первым вариантом осуществления изобретения.
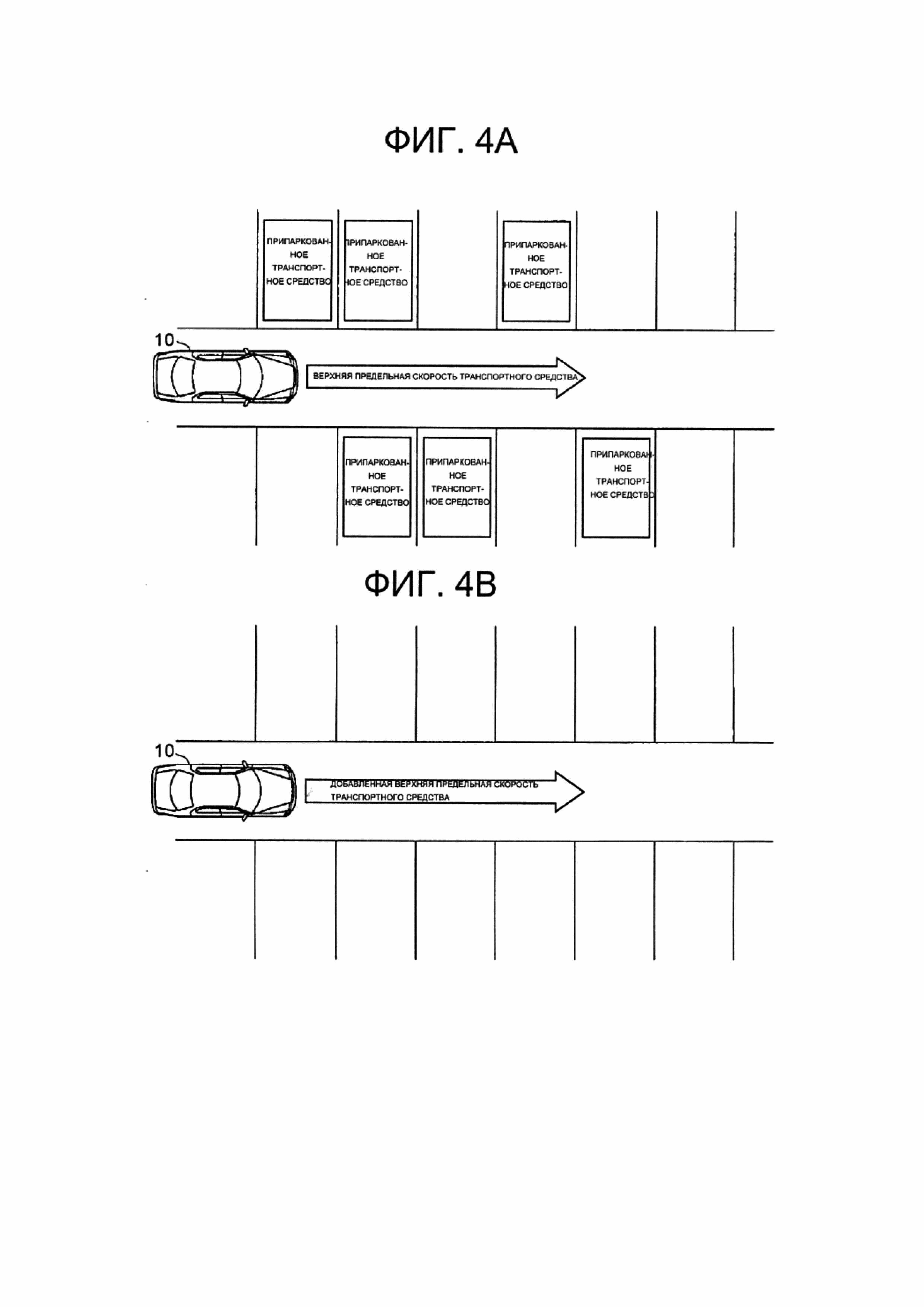
На ФИГ. 4A изображен вид, иллюстрирующий пример скорости транспортного средства в соответствии с первым вариантом осуществления изобретения.
На ФИГ. 4B изображен вид, иллюстрирующий другой пример скорости транспортного средства в соответствии с первым вариантом осуществления изобретения.
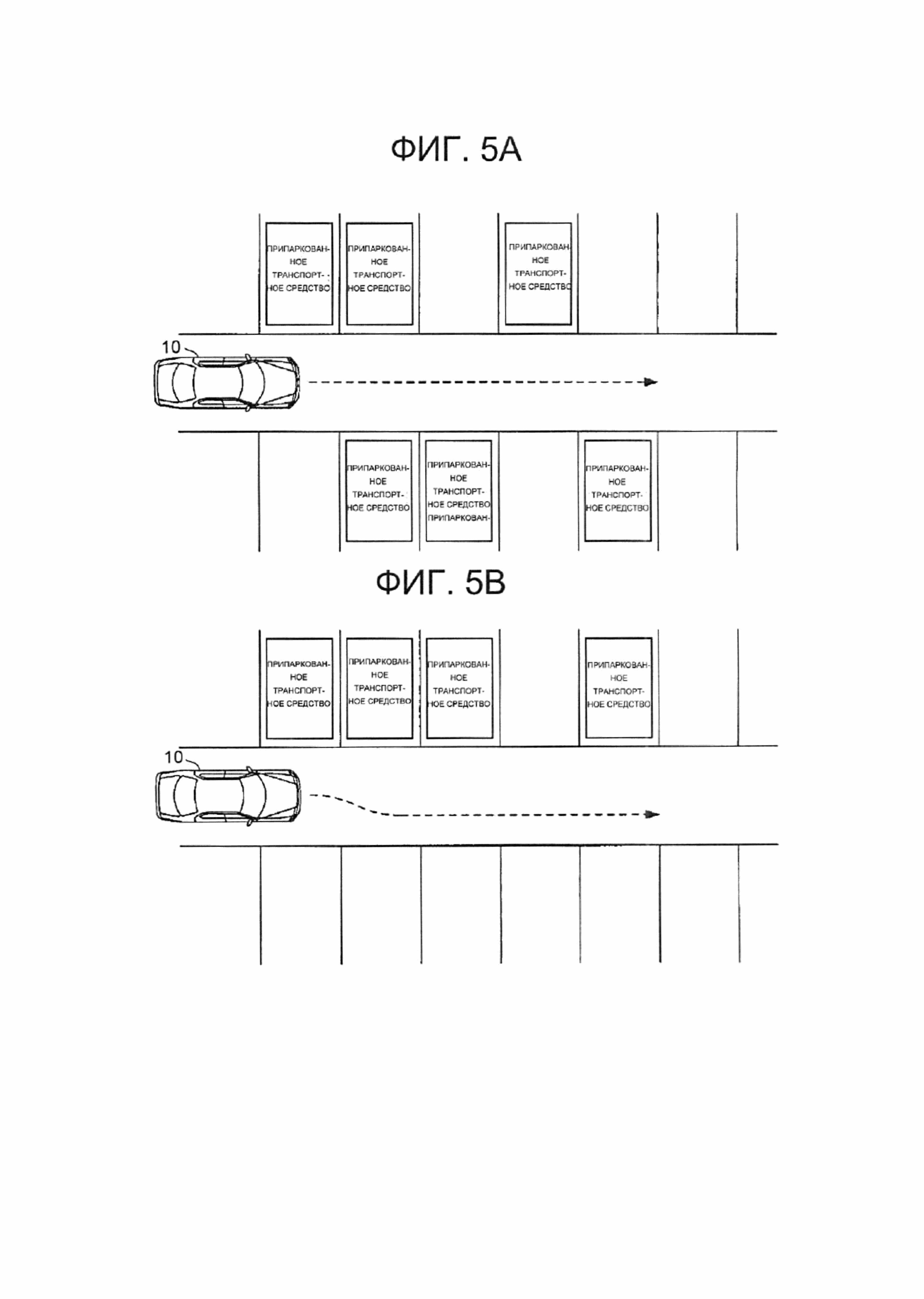
На ФИГ. 5A изображен вид, иллюстрирующий пример маршрута движения транспортного средства в соответствии с первым вариантом осуществления изобретения.
На ФИГ. 5B изображен вид, иллюстрирующий другой пример маршрута движения транспортного средства в соответствии с первым вариантом осуществления изобретения.
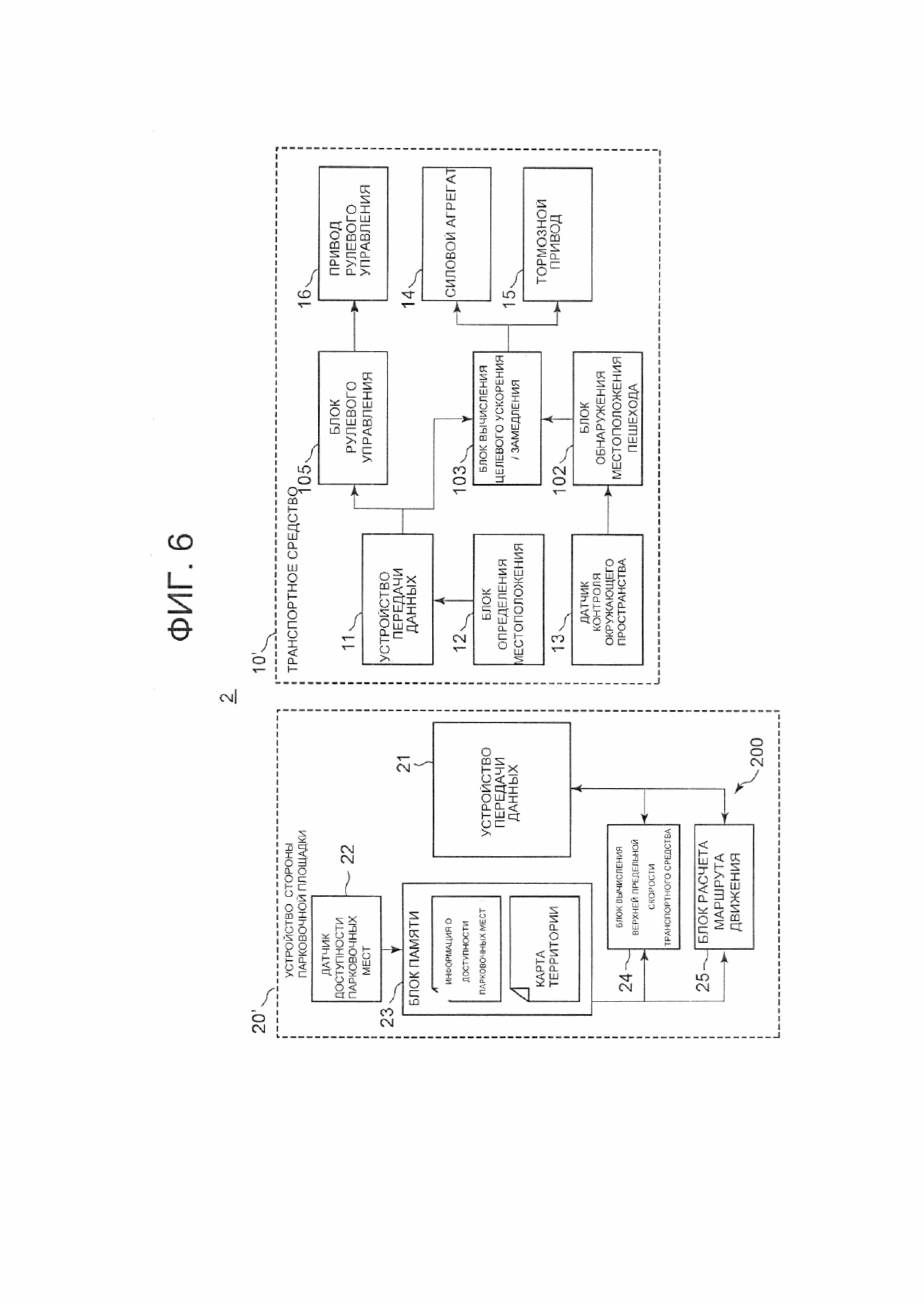
На ФИГ. 6 изображена структурная схема, демонстрирующая конфигурацию системы парковки в соответствии со вторым вариантом осуществления изобретения.
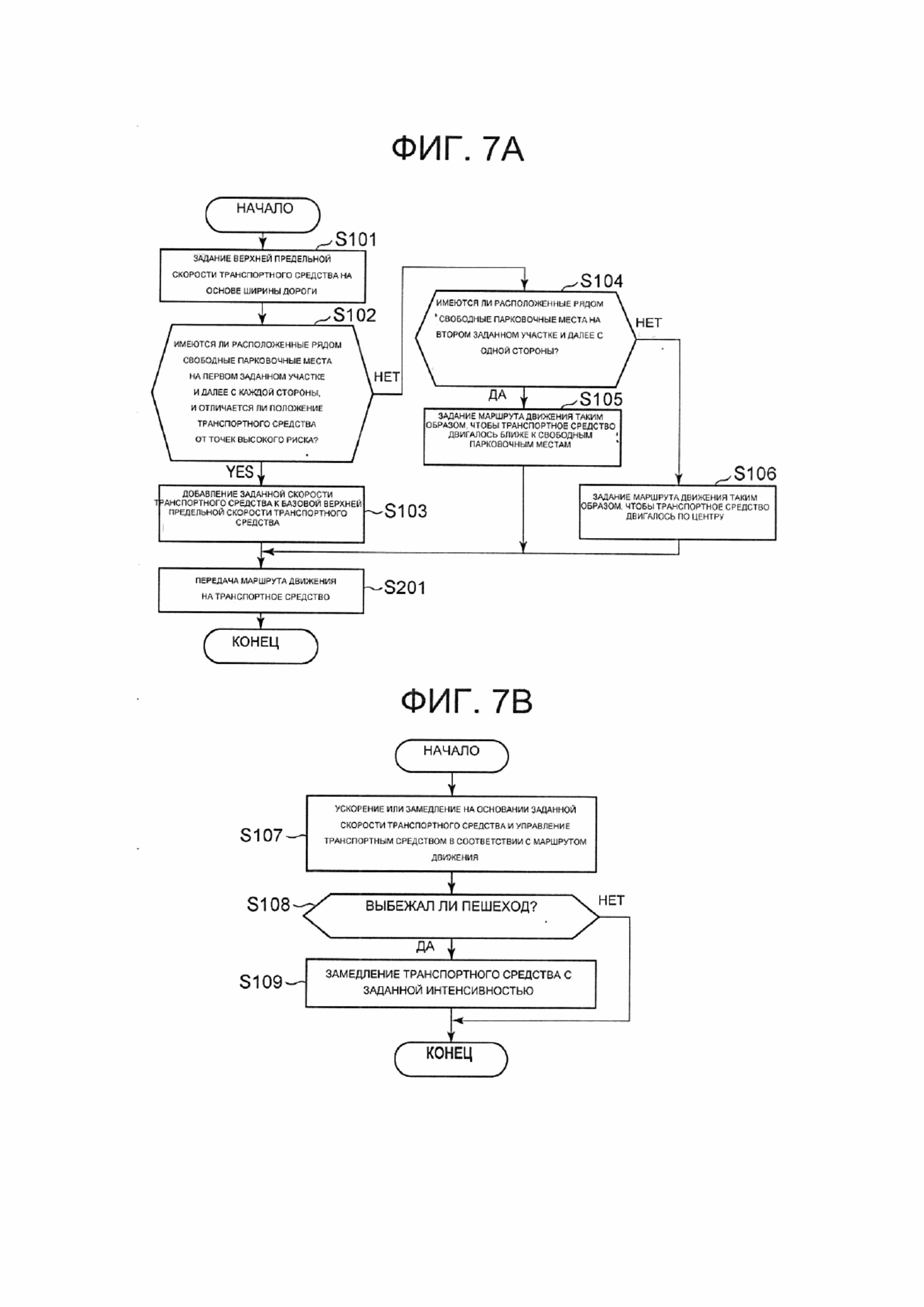
На ФИГ. 7A изображена блок-схема, иллюстрирующая процесс, выполняемый устройством стороны парковочной площадки в процессе оказания помощи водителю в соответствии со вторым вариантом осуществления изобретения.
На ФИГ. 7B изображена блок-схема, иллюстрирующая процесс, выполняемый транспортным средством в процессе оказания помощи водителю в соответствии со вторым вариантом осуществления изобретения.
ПОДРОБНОЕ РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] Варианты осуществления устройства помощи водителю раскрыты со ссылкой на сопроводительные чертежи.
Первый вариант осуществления
[0010] Первый вариант осуществления устройства помощи водителю раскрыт со ссылкой на ФИГ. 1– 5B.
Конфигурация
[0011] Конфигурация устройства помощи водителю согласно первому варианту осуществления изобретения раскрыта со ссылкой на ФИГ. 1. На ФИГ. 1 изображена структурная схема, демонстрирующая конфигурацию системы парковки в соответствии с первым вариантом осуществления изобретения.
[0012] Как показано на ФИГ. 1, система 1 парковки содержит транспортное средство 10 и устройство 20 стороны парковочной площадки. Транспортное средство 10 содержит блок 11 передачи данных, блок 12 определения местоположения, датчик 13 контроля окружающего пространства, силовой агрегат 14, тормозной привод 15, привод 16 рулевого управления, вычислительный блок 101 верхней предельной скорости транспортного средства, вычислительный блок 102 местоположения пешеходов, вычислительный блок 103 целевого ускорения / замедления и блок 104 расчета маршрута движения. Вычислительный блок 101 верхней предельной скорости транспортного средства, вычислительный блок 102 местоположения пешеходов, вычислительный блок 103 целевого ускорения / замедления и блок 104 расчета маршрута движения формируют устройство 100 помощи водителю в соответствии с первым вариантом осуществления. Устройство 20 стороны парковочной площадки содержит блок 21 передачи данных, датчик 22 доступности парковочных мест и блок 23 памяти.
[0013] Блоки 11, 21 передачи данных выполнены с возможностью беспроводного обмена данными друг с другом. Блок 12 определения местоположения содержит, например, устройство глобальной системы позиционирования (GPS). Блок 12 определения местоположения выполнен с возможностью определения местоположения транспортного средства 10. Датчик 13 контроля окружающего пространства содержит устройство, способное обнаруживать объект (в частности, пешехода) вблизи транспортного средства 10. Таким устройством может быть камера, захватывающая изображение вне транспортного средства 10, лазерный датчик, датчик миллиметрового диапазона и ультразвуковой датчик. Существующие технологии могут быть применены к силовому агрегату 14, тормозному приводу 15 и приводу 16 рулевого управления, поэтому эти элементы не будут подробно рассмотрены в настоящей заявке.
[0014] Датчик 22 доступности парковочных мест содержит, например, датчик (например, чувствительный к давлению датчик и т. п.), скрытый под поверхностью каждого парковочного места парковочной площадки, камеру, установленную в таком положении, в котором она способна с высоты птичьего полета обозревать каждое парковочное место, или иные подобные устройства. Датчик 22 доступности парковочных мест выполнен с возможностью распознавания наличия припаркованного транспортного средства на каждом парковочном месте. Датчик 22 доступности парковочных мест подает сигнал, указывающий на занятое состояние парковочного места, на котором находится припаркованное транспортное средство, и сигнал, указывающий на свободное состояние парковочного места, на котором нет припаркованного транспортного средства.
[0015] Парковочная ситуация (то есть занятое или свободное состояние) каждого парковочного места на основании сигнала, получаемого от датчика 22 доступности парковочных мест, сохраняется в блоке 23 памяти в виде информации о доступности парковочных мест. Информация о доступности парковочных мест обновляется с заданной периодичностью на основании сигнала, выдаваемого датчиком 22 доступности парковочных мест. Карта территории парковочной площадки дополнительно сохраняется в блоке 23 памяти. Карта территории содержит, например, информацию о местоположении каждого парковочного места, информацию о протяженности зоны проезда (то есть пространства для перемещения транспортного средства к парковочному месту) в направлении ширины (в дальнейшем обозначается, как ширина дороги, где это необходимо), информацию о рисках и т. п.
[0016] Информация о рисках представляет собой информацию, указывающую на риски, связанные со столкновением транспортного средства и пешехода с точки зрения структуры парковочной площадки. В частности, информация о рисках представляет собой информацию, указывающую оценку соизмеримую с риском в каждой точке парковочной площадки. Оценка имеет относительно высокое значение в месте, в котором прогнозируется относительно интенсивное движение транспортных средств и людей. В качестве примера такого места можно указать области вблизи пешеходных переходов на парковочной площадке, места возле заезда на площадку и выезда с нее, места возле входа и выхода из коммерческих объектов, если парковочная площадка и коммерческие объекты находятся друг рядом с другом, а также пересечения зон проезда на площадке. В дальнейшем точки с относительно высоким значением оценки будут называться точками высокого риска, в соответствующих случаях.
[0017] Устройство 100 помощи водителю выполнено с возможностью автоматического управления транспортным средством 10 на парковочной площадке посредством управления силовым агрегатом 14, тормозным приводом 15 и приводом 16 рулевого управления.
[0018] Вычислительный блок 101 верхней предельной скорости транспортного средства, входящий в состав устройства 100 помощи водителю, получает информацию о доступности парковочных мест и карту территории от устройства 20 стороны парковочной площадки через блок 11 передачи данных, а также получает информацию о местоположении транспортного средства 10, полученную от блока 12 определения местоположения. Вычислительный блок 101 верхней предельной скорости транспортного средства определяет ширину дороги зоны проезда, по которой в настоящее время перемещается транспортное средство 10, на основании местоположения транспортного средства 10 и карты территории, и устанавливает базовую верхнюю предельную скорость транспортного средства, соизмеримую с указанной шириной дороги.
[0019] Как показано на ФИГ. 2, базовая верхняя предельная скорость транспортного средства определяется относительно ширины дороги. На ФИГ. 2 Vu задана с учетом допустимого замедления для резкого торможения с целью предотвращения столкновения с пешеходом на парковочной площадке. Например, если допустимое замедление составляет 0,1G, Vu составит примерно 17 километров в час. Например, если допустимое замедление составляет 0,2G, Vu составит примерно 34 километров в час. Допустимое замедление установлено в качестве примера значения, не оказывающего существенного влияния на водителя или иного оператора транспортного средства 10 в результате резкого торможения.
[0020] Вычислительный блок 101 верхней предельной скорости транспортного средства определяет парковочную ситуацию каждого из множества парковочных мест, примыкающих к зоне проезда, по которой в настоящее время перемещается транспортное средство 10, в зависимости от местоположения транспортного средства 10, карты территории и информации о доступности парковочных мест. В данном случае парковочное место, на котором находится припаркованное транспортное средство, обозначается, как занятое парковочное место (занятое место), а парковочное место, на котором нет припаркованного транспортного средства, обозначается как свободное парковочное место (свободное место). Если расположенные подряд свободные парковочные места присутствуют на первом предварительно заданном участке или далее в направлении, в котором зона проезда простирается как с правой, так и с левой стороны от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда, вычислительный блок 101 верхней предельной скорости транспортного средства задает скорость транспортного средства, полученную добавлением заранее заданной скорости транспортного средства к базовой верхней предельной скорости транспортного средства (в дальнейшем в необходимых случаях – добавленная верхняя предельная скорость транспортного средства), в качестве верхней предельной скорости транспортного средства 10 при условии, что местоположение транспортного средства 10 является иным, чем точки высокого риска, идентифицируемые на основании информации о рисках, включенной в карту территории.
[0021] С другой стороны, если расположенные подряд свободные парковочные места отсутствуют на первом предварительно заданном участке или далее в направлении, в котором зона проезда простирается, по меньшей мере, или с правой, или левой стороны от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда (или если расположенные подряд свободные парковочные места присутствуют на первом предварительно заданном участке и далее в направлении, в котором зона проезда простирается как с правой, так и с левой стороны от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда, но местоположение транспортного средства 10 находится в одной из точек высокого риска), вычислительный блок 101 верхней предельной скорости транспортного средства задает базовую верхнюю предельную скорость транспортного средства в качестве верхней предельной скорости транспортного средства 10.
[0022] Первый предварительно заданный участок является показателем для определения, необходимо ли добавлять предварительно заданную скорость транспортного средства к базовой верхней предельной скорости транспортного средства. Первый предварительно заданный участок может быть задан, например, как нижнее предельное значение участка (расстояния), на котором амплитуда продольного ускорения транспортного средства 10, когда транспортное средство 10 ускоряется от базовой верхней предельной скорости транспортного средства до добавленной верхней предельной скорости транспортного средства, а затем замедляется от добавленной верхней предельной скорости транспортного средства до базовой верхней предельной скорости транспортного средства, становится меньше, либо равной допустимому значению.
[0023] Вычислительный блок 102 местоположения пешеходов, входящий в состав устройства 100 помощи водителю, вычисляет местоположение пешехода вблизи транспортного средства 10 на основании сигнала, получаемого от датчика 13 контроля окружающего пространства. Местоположение пешехода не ограничивается координатами (например, широтой и долготой) или расстоянием от транспортного средства 10. Местоположение пешехода может быть указано, например, в виде времени до столкновения (time to collision - TTC) или иного подобного параметра.
[0024] Вычислительный блок 103 целевого ускорения / замедления, входящий в состав устройства 100 помощи водителю, управляет как силовым агрегатом 14, так и тормозным приводом 15 таким образом, чтобы скорость транспортного средства 10 не превышала верхнюю предельную скорость транспортного средства, установленную вычислительным блоком 101 верхней предельной скорости транспортного средства. Кроме того, если определено, что существует вероятность столкновения между транспортным средством 10 и пешеходом на основании местоположения пешехода, рассчитанного вычислительным блоком 102 местоположения пешеходов, вычислительный блок 103 целевого ускорения / замедления управляет тормозным приводом 15 с целью замедления или остановки транспортного средства 10.
[0025] Блок 104 расчета маршрута движения, входящий в состав устройства 100 помощи водителю, вычисляет маршрут движения транспортного средства 10 на основании местоположения транспортного средства 10, карты территории и информации о доступности парковочных мест. Блок 104 расчета маршрута движения управляет приводом 16 рулевого управления таким образом, чтобы транспортное средство 10 перемещалось вдоль рассчитанного маршрута движения.
[0026] В частности, например, блок 104 расчета маршрута движения определяет парковочную ситуацию каждого из множества парковочных мест, примыкающих к зоне проезда, по которому в настоящее время перемещается транспортное средство 10, на основании местоположения транспортного средства 10, карты территории и информации о доступности парковочных мест. Если расположенные подряд свободные парковочные места присутствуют на втором предварительно заданном участке и далее в направлении, в котором зона проезда простирается среди парковочных мест, которые примыкают к зоне проезда с одной из сторон - правой или левой от транспортного средства 10, и если парковочные места, примыкающие к зоне проезда с одной из сторон - левой или правой от транспортного средства 10, находящиеся напротив свободных парковочных мест, заняты, блок 104 расчета маршрута движения определяет маршрут, по которому транспортное средство 10 перемещается в зоне проезда вблизи одной из сторон - правой или левой от транспортного средства 10.
[0027] С другой стороны, если расположенные подряд свободные парковочные места отсутствуют на втором предварительно заданном участке и далее на любой из сторон - правой или левой от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда (или если расположенные подряд свободные парковочные места присутствуют на втором предварительно заданном участке или далее как на правой, так и на левой стороне от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда), блок 104 расчета маршрута движения определяет маршрут, по которому транспортное средство 10 будет перемещаться посередине зоны проезда.
[0028] Второй предварительно заданный участок является показателем для определения, необходимо ли задавать маршрут проезда, по которому транспортное средство 10 будет перемещаться вблизи одной стороны зоны проезда. Второй предварительно заданный участок может быть установлен, например, как нижнее предельное значение участка (расстояния), на котором амплитуда, по меньшей мере, бокового ускорения или скорости рыскания транспортного средства 10, когда транспортное средство 10 перемещается от середины зоны проезда к одной стороне зоны проезда а, и затем перемещается от одной стороны к середине, становится меньше допустимого значения или равна ему.
Процесс помощи водителю
[0029] Процесс помощи водителю, осуществляемый устройством 100 помощи водителю в системе 1 парковки, имеющей описанную конфигурацию, раскрыт со ссылкой на блок - схему последовательности операций согласно ФИГ.3.
[0030] Как показано на ФИГ. 3, блок 101 вычисления верхней предельной скорости транспортного средства получает информацию о доступности парковочных мест и карту территории от устройства 20 стороны парковочной площадки через блок 11 передачи данных, а также получает информацию о местоположении транспортного средства 10, полученную от блока 12 определения местоположения. Блок 101 вычисления верхней предельной скорости транспортного средства определяет ширину дороги зоны проезда, по которому в настоящее время перемещается транспортное средство 10, на основании местоположения транспортного средства 10 и карты территории, и устанавливает базовую верхнюю предельную скорость транспортного средства, соизмеримую с указанной шириной дороги (этап S101).
[0031] Затем блок 101 вычисления верхней предельной скорости транспортного средства определяет парковочную ситуацию каждого из множества парковочных мест, примыкающих к зоне проезда, по которому в настоящее время перемещается транспортное средство 10, в зависимости от положения транспортного средства 10, карты территории и информации о доступности парковочных мест. Блок 101 вычисления верхней предельной скорости транспортного средства определяет, присутствуют ли расположенные подряд свободные парковочные места на первом предварительно заданном участке и далее в направлении, в котором зона проезда простирается как с правой, так и с левой стороны от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда, и является ли местоположение транспортного средства 10 иным, чем точки высокого риска (этап S102).
[0032] Если на этапе S102 будет обнаружено, что расположенные подряд свободные парковочные места присутствуют на первом предварительно заданном участке и далее в направлении, в котором зона проезда простирается как с правой, так и с левой стороны от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда, и местоположение транспортного средства 10 является иным, чем точки высокого риска («да» на этапе S102), блок 101 вычисления верхней предельной скорости транспортного средства получает добавленную верхнюю предельную скорость транспортного средства путем добавления предварительно заданной скорости транспортного средства к базовой верхней предельной скорости транспортного средства и устанавливает добавленную верхнюю предельную скорость транспортного средства в качестве верхней предельной скорости транспортного средства 10 (этап S103). В этом случае блок 104 расчета маршрута движения рассчитывает маршрут, по которому транспортное средство 10 перемещается в середине зоны проезда.
[0033] С другой стороны, если на этапе S102 будет обнаружено, что расположенные подряд свободные парковочные места отсутствуют на первом предварительно заданном участке и далее в направлении, в котором зона проезда простирается, по меньшей мере, с одной из сторон - правой или левой стороны от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда, или если местоположение транспортного средства 10 не является иным, чем точки высокого риска, то есть местоположение транспортного средства 10 является одной из точек высокого риска («нет» на этапе S102), блок 101 вычисления верхней предельной скорости транспортного средства устанавливает базовую верхнюю предельную скорость транспортного средства в качестве верхней предельной скорости транспортного средства 10. Блок 104 расчета маршрута движения определяет парковочную ситуацию каждого из множества парковочных мест, примыкающих к зоне проезда, по которому в настоящее время перемещается транспортное средство 10, в зависимости от местоположения транспортного средства 10, карты территории и информации о доступности парковочных мест. Затем блок 104 расчета маршрута движения определяет, присутствуют ли расположенные подряд свободные парковочные места на втором предварительно заданном участке и далее в направлении, в котором зона проезда простирается среди парковочных мест, примыкающих к зоне проезда с одной из сторон - правой или левой стороны от транспортного средства 10, а также среди парковочных мест, примыкающих к зоне проезда с другой из сторон - левой или правой стороны от транспортного средства 10, и находящихся напротив свободных парковочных мест (этап S104).
[0034] Если на этапе S104 будет обнаружено, что расположенные подряд свободные парковочные места присутствуют на втором предварительно заданном участке или далее в направлении, в котором зона проезда простирается среди парковочных мест, примыкающих к зоне проезда с одной из сторон - правой или левой от транспортного средства 10, а парковочные места, примыкающие к зоне проезда с другой из сторон - с правой или левой от транспортного средства 10, и находящиеся напротив свободных парковочных мест, заняты («да» на этапе S104), блок 104 расчета маршрута движения рассчитывает маршрут, по которому транспортное средство 10 перемещается вблизи одной из сторон - правой или левой стороны зоны проезда (этап S105). В результате последний рассчитанный маршрут движения будет обновлен.
[0035] С другой стороны, если на этапе S104 будет обнаружено, что расположенные подряд свободные парковочные места отсутствуют на втором предварительно заданном участке или далее на любой из сторон - правой или левой стороне от транспортного средства 10 среди парковочных мест, примыкающих к зоне проезда, или если на этапе S104 будет обнаружено, что расположенные подряд свободные парковочные места присутствуют на втором предварительно заданном участке или далее не только на одной из сторон – правой или левой стороны от транспортного средства 10, то есть на каждой из сторон - правой и левой стороны от транспортного средства 10 среди парковочных мест, которые примыкают к зоне проезда («нет» на этапе S104), блок 104 расчета маршрута движения определяет маршрут, по которому транспортное средство 10 будет перемещаться в середине зоны проезда (этап S106). В результате последний рассчитанный маршрут движения будет обновлен.
[0036] После этапов S103, S105 или этапа S106 блок 103 вычисления целевого ускорения / замедления управляет силовым агрегатом 14 и тормозным приводом 15 таким образом, чтобы скорость транспортного средства 10 не превышала верхней предельной скорости транспортного средства, установленной блоком 101 вычисления верхней предельной скорости транспортного средства (этап S107). Блок 104 расчета маршрута движения управляет приводом 16 рулевого управления таким образом, чтобы транспортное средство 10 перемещалось по рассчитанному маршруту (этап S107). В частности, если процесс этапа S107 выполняется после процесса этапа S103, транспортное средство 10 перемещается в середине зоны проезда с добавленной верхней предельной скоростью транспортного средства, как показано, например, на ФИГ. 4B. Если процесс этапа S107 выполняется после процесса этапа S105, транспортное средство 10 перемещается вблизи одной стороны зоны проезда с базовой верхней предельной скоростью транспортного средства, как показано, например, стрелкой в виде пунктирной линии на ФИГ. 5B. Если процесс этапа S107 выполняется после процесса этапа S106, транспортное средство 10 перемещается в середине зоны проезда с базовой верхней предельной скоростью транспортного средства, что показано, например, на ФИГ. 4А или обозначено, например, стрелкой в виде пунктирной линии на ФИГ. 5A.
[0037] Параллельно процессу этапа S107 блок 103 вычисления целевого ускорения / замедления определяет, выбежал ли пешеход перед транспортным средством 10, например, из-за припаркованного транспортного средства в зависимости от местоположения пешехода, рассчитанного блоком 102 определения местоположения пешехода (этап S108). Если будет обнаружено, что пешеход не выбегал перед транспортным средством 10 (то есть пешеходы перед транспортным средством 10 отсутствуют) («нет» на этапе S108), процесс помощи водителю, представленный на ФИГ. 3, завершается. После этого процесс помощи водителю, показанный на ФИГ. 3, будет запущен снова по истечении предварительно заданного периода времени (например, от нескольких миллисекунд до нескольких десятков миллисекунд). То есть процесс помощи водителю, показанный на ФИГ. 3 выполняется многократно с периодичностью, соответствующей предварительно заданному периоду времени.
[0038] С другой стороны, если на этапе S108 будет обнаружено, что пешеход выбежал перед транспортным средством 10 («да» на этапе S108), блок 103 вычисления целевого ускорения / замедления управляет тормозным приводом 15 с целью замедления или остановки транспортного средства 10 (этап S109). После этого процесс помощи водителю, показанный на ФИГ. 3, будет запущен повторно по истечении предварительно заданного периода времени.
[0039] Карту территории можно, например, сохранить заранее в транспортном средстве 10 в виде части базы данных карт для навигационной системы (не показанной на фигуре).
Полезные эффекты изобретения
[0040] (1) Исходя из допущения, что выходной сигнал датчика 13 контроля окружающего пространства используется, когда заданы верхняя предельная скорость и маршрут движения транспортного средства 10, на парковочной площадке, для которой относительно высока вероятность нахождения припаркованных транспортных средств перед транспортным средством 10 (иными словами, относительно высока вероятность наличия слепых зон, обусловленных припаркованными транспортными средствами), сложно определить ситуацию за припаркованными транспортными средствами (то есть объекты, находящиеся за припаркованными транспортными средствами). Поэтому верхняя предельная скорость и маршрут движения транспортного средства 10 задают и обновляют для каждого относительно узкого диапазона, который доступен для определения на основании сигнала, полученного от датчика 13 контроля окружающего пространства. В результате возможно относительно частое изменение верхней предельной скорости и маршрута движения транспортного средства 10, и могут возникнуть колебания, по меньшей мере, одного из параметров - продольного ускорения, бокового ускорения и скорости рыскания транспортного средства 10.
[0041] Следовательно, в настоящем варианте осуществления верхняя предельная скорость и маршрут движения транспортного средства 10 устанавливают с учетом информации о доступности парковочных мест. Как было описано выше, информация о доступности парковочных мест указывает парковочную ситуацию для каждого парковочного места на основании сигнала, получаемого от датчика 22 доступности парковочного места. Поэтому даже при наличии относительно большого количества припаркованных транспортных средств устройство 100 помощи водителю (в частности, блок 101 вычисления верхней предельной скорости транспортного средства и блок 104 расчета маршрута движения) способно определять парковочные ситуации для более широкого диапазона по сравнению с тем, когда используется сигнал, полученный от датчика 13 контроля окружающего пространства. То есть устройство 100 помощи водителю способно учитывать ситуацию в зоне, недоступной для распознавания на основании сигнала датчика 13 контроля окружающего пространства, при установке верхней предельной скорости и маршрута движения транспортного средства с использованием информации о доступности парковочных мест. Это уменьшает количество изменений верхней предельной скорости и маршрута движения транспортного средства 10, а также вероятность колебаний продольного ускорения или иного подобного параметра транспортного средства 10.
[0042] (2) Как показано на ФИГ. 2, базовую верхнюю предельную скорость транспортного средства устанавливают в соответствии с размером в направлении ширины зоны проезда (шириной дороги). Если ширина дороги относительно мала (например, четыре метра или около того), расстояние между транспортным средством 10 и припаркованными транспортными средствами будет относительно невелико. Поэтому базовую верхнюю предельную скорость транспортного средства устанавливают на относительно небольшое значение, что позволяет транспортному средству 10 избежать столкновения с пешеходом, когда пешеход выбегает из-за припаркованных транспортных средств. С другой стороны, если ширина дороги относительно велика (например, десять метров или около того), расстояние между транспортным средством 10 и припаркованными транспортными средствами будет относительно большим. Кроме того, когда ширина дороги относительно велика, предполагается, что пешеход самостоятельно замечает движущееся транспортное средство, поэтому вероятность того, что пешеход неосторожно выбежит в проездное пространство будет низкой. Поэтому базовую верхнюю предельную скорость транспортного средства устанавливают на относительно большое значение, таким образом, чтобы обеспечить относительную плавность движения транспортного средства 10 при возможности предотвратить столкновение между транспортным средством 10 и пешеходом.
[0043] Базовую верхнюю предельную скорость транспортного средства устанавливают с учетом не только указанной выше ширины дороги, но и допустимого замедления, выбранного таким образом, чтобы не оказать существенного воздействия на водителя или иных лиц в транспортном средстве 10 вследствие резкого торможения при предотвращении столкновения между транспортным средством 10 и пешеходом. Поэтому устройство 100 помощи водителю, когда пешеход выбегает перед транспортным средством 10, движущимся со скоростью, соответствующей базовой верхней предельной скорости, безусловно, предотвращает столкновение между транспортным средством 10 и пешеходом, а также значительное воздействие на водителя или иное лицо в транспортном средстве 10 при резком торможении.
[0044] (3) Как было описано выше, блок 101 вычисления верхней предельной скорости транспортного средства задает добавленную верхнюю предельную скорость транспортного средства в качестве верхней предельной скорости транспортного средства 10, если расположенные подряд свободные парковочные места присутствуют на первом предварительно заданном участке и далее, в направлении, в котором зона проезда, по которому в настоящий момент движется транспортное средство 10, простирается как с правой, так и с левой стороны от транспортного средства 101 среди парковочных мест, примыкающих к зоне проезда, а местоположение транспортного средства 10 является иным, чем точки высокого риска. В такой конфигурации можно достаточно заблаговременно обнаружить пешехода и обеспечить относительно плавное движение транспортного средства 10 в зоне проезда, в которой низка вероятность того, что пешеход выбежит перед транспортным средством 10.
[0045] Аналогичным образом, этот полезный эффект изобретения реализуется в том случае, если верхняя предельная скорость транспортного средства уменьшается, когда присутствует относительно большое число (например, первое число) занятых парковочных мест в группе парковочных мест, примыкающих к зоне проезда, по которому в настоящее время движется транспортное средство 10 (то есть парковочных мест, примыкающих к зоне проезда с одной из сторон - правой или левой стороны от транспортного средства 10, и парковочных мест, примыкающих к зоне проезда с другой стороны - правой или левой стороны от транспортного средства 10) по сравнению со случаем, когда относительно небольшое число (например, второе число, меньше первого числа) занятых парковочных мест присутствует в данной группе парковочных мест. Кроме того, этот полезный эффект изобретения аналогичным образом реализуется в том случае, когда верхняя предельная скорость транспортного средства 10 возрастает по мере увеличения числа свободных парковочных мест, присутствующих в указанной группе парковочных мест.
[0046] (4) Как было описано выше, если расположенные подряд свободные парковочные места присутствуют на втором предварительно заданном участке или далее в направлении, в котором зона проезда, по которому в настоящий момент движется транспортное средство, простирается среди парковочных мест, примыкающих к зоне проезда с одной из сторон - правой или левой стороны от транспортного средства 10, и парковочные места, примыкающие к зоне проезда с другой стороны - с левой или правой стороны от транспортного средства 10 и находящиеся напротив свободных парковочных мест, заняты, блок 104 расчета маршрута движения рассчитывает маршрут, по которому транспортное средство 10 перемещается в зоне проезда вблизи одной из сторон - правой или левой стороны от транспортного средства 10. В такой конфигурации по сравнению с вариантом, в котором транспортное средство 10 движется в середине зоны проезда, расстояние между транспортным средством 10 и пешеходом, который выбежит из-за припаркованного транспортного средства, увеличивается, что позволяет избежать столкновения между транспортным средством 10 и пешеходом.
[0047] Аналогичным образом этот полезный эффект изобретения реализуется также в том случае, если рассчитан маршрут движения, по которому транспортное средство 10 движется вблизи стороны, на которой число занятых парковочных мест меньше (иными словами, стороны, на которой больше число свободных парковочных мест) между группой парковочных мест, примыкающих к зоне проезда, по которому в настоящее время движется транспортное средство 10, на одной из сторон - правой или левой стороне от транспортного средства 10, и группой парковочных мест, примыкающих к зоне проезда с другой стороны - правой или левой стороны от транспортного средства 10.
Второй вариант осуществления
[0048] Второй вариант осуществления устройства помощи водителю раскрыт со ссылкой на ФИГ. 6, ФИГ. 7A и ФИГ. 7B. В описанном выше первом варианте осуществления верхняя предельная скорость транспортного средства и маршрут движения устанавливаются транспортным средством 10. В нижеследующем описании второго варианта осуществления верхняя предельная скорость транспортного средства и маршрут движения устанавливаются устройством 20 стороны парковочной площадки. Остальные компоненты аналогичны компонентам первого варианта осуществления изобретения, раскрытого выше. Во втором варианте осуществления ссылочные обозначения, относящиеся к общим компонентам на чертежах, и описания, совпадающие с описанием первого варианта осуществления, будут опущены по мере необходимости. По существу, достаточно рассмотреть только отличающиеся компоненты со ссылкой на ФИГ. 6, ФИГ. 7A и ФИГ. 7B.
Конфигурация
[0049] Как показано на ФИГ. 6, парковочная система 2 содержит транспортное средство 10ґ и устройство 20ґ стороны парковочной площадки. Транспортное средство 10ґ содержит блок 11 передачи данных, блок 12 определения местоположения, датчик 13 контроля окружающего пространства, силовой агрегат 14, тормозной привод 15, привод 16 рулевого управления, вычислительный блок 102 местоположения пешеходов, вычислительный блок 103 целевого ускорения / замедления и блок 105 рулевого управления. Устройство 20' стороны парковочной площадки содержит блок 21 передачи данных, датчик 22 доступности парковочных мест, блок 23 памяти, вычислительный блок 24 верхней предельной скорости транспортного средства и блок 25 расчета маршрута движения. Вычислительный блок 24 верхней предельной скорости транспортного средства, блок 25 расчета маршрута движения и блок 21 передачи данных формируют устройство 200 помощи водителю в соответствии со вторым вариантом осуществления.
[0050] Вычислительный блок 103 целевого ускорения / замедления управляет силовым агрегатом 14 и тормозным приводом 15, а блок 105 рулевого управления управляет приводом 16 рулевого управления. Таким образом, вычислительный блок 103 целевого ускорения / замедления и блок 105 рулевого управления выполнены с возможностью автоматического управления транспортным средством 10' на парковочной площадке.
Процесс помощи водителю
[0051] Далее процесс помощи водителю, осуществляемый устройством 200 помощи водителю в парковочной системе 2, раскрыт со ссылкой на блок-схемы последовательности операций согласно ФИГ. 7A и ФИГ. 7B.
[0052] Как показано на ФИГ. 7A, вычислительный блок 24 верхней предельной скорости транспортного средства получает информацию о местоположении транспортного средства 10ґ, являющегося рассматриваемым транспортным средством, от транспортного средства 10ґ через блок 21 передачи данных, а также информацию о доступности парковочных мест и карту территории от блока 23 памяти. Идентификационная информация, идентифицирующая транспортное средство 10', обычно добавляется к информации, указывающей на местоположение транспортного средства 10'. Вычислительный блок 24 верхней предельной скорости транспортного средства определяет ширину дороги зоны проезда, по которому в настоящее время перемещается транспортное средство 10', на основании местоположения транспортного средства 10' и карты территории, и устанавливает базовую верхнюю предельную скорость транспортного средства, соизмеримую с определенной шириной дороги (этап S101).
[0053] Затем вычислительный блок 24 верхней предельной скорости транспортного средства определяет парковочную ситуацию каждого из множества парковочных мест, примыкающих к зоне проезда, по которому в настоящее время перемещается транспортное средство 10', в зависимости от местоположения транспортного средства 10', карты территории и информации о доступности парковочных мест. Вычислительный блок 24 верхней предельной скорости транспортного средства определяет, присутствуют ли расположенные подряд свободные места на первом предварительно заданном участке или далее в направлении, в котором зона проезда простирается, как с правой, так и с левой стороны от транспортного средства 10', среди парковочных мест, примыкающих к зоне проезда, и местоположение транспортного средства 10' является иным, чем точки высокого риска (этап S102).
[0054] Если на этапе S102 будет обнаружено, что расположенные подряд свободные места на первом предварительно заданном участке или далее в направлении, в котором простирается зона проезда, как с правой, так и с левой стороны от транспортного средства 10', среди парковочных мест, примыкающих к зоне проезда, и местоположение транспортного средства 10' является иным, чем точки высокого риска («да» на этапе S102), вычислительный блок 24 верхней предельной скорости транспортного средства получает добавленную верхнюю предельную скорость транспортного средства путем добавления предварительно заданной скорости транспортного средства к базовой верхней предельной скорости транспортного средства, и устанавливает добавленную верхнюю предельную скорость транспортного средства в качестве верхней предельной скорости транспортного средства 10' (этап S103). В этом случае блок 25 расчета маршрута движения рассчитывает маршрут, по которому транспортное средство 10' перемещается в середине зоны проезда.
[0055] С другой стороны, если на этапе S102 будет обнаружено, что расположенные подряд свободные места отсутствуют на первом предварительно заданном участке или далее в направлении, в котором простирается зона проезда на, по меньшей мере, одной из сторон - правой или левой стороне от транспортного средства 10' среди парковочных мест, примыкающих к зоне проезда, или если местоположение транспортного средства 10' не является иным, чем точки высокого риска, то есть местоположение транспортного средства 10' относится к одной из точек высокого риска («нет» на этапе S102), блок 24 вычисления верхней предельной скорости транспортного средства устанавливает базовую верхнюю предельную скорость транспортного средства в качестве верхней предельной скорости транспортного средства 10'. Блок 25 расчета маршрута движения определяет парковочную ситуацию каждого из множества парковочных мест, примыкающих к зоне проезда, по которому в настоящее время перемещается транспортное средство 10', в зависимости от местоположения транспортного средства 10', карты территории и информации о доступности парковочных мест. Затем блок 25 расчета маршрута движения определяет, присутствуют ли расположенные подряд свободные парковочные места на втором предварительно заданном участке или далее в направлении, в котором простирается зона проезда среди парковочных мест, примыкающих к зоне проезда на одной из сторон - с правой или левой стороны от транспортного средства 10', и парковочных мест, примыкающих к зоне проезда с другой стороны - с левой или правой стороны от транспортного средства 10' и находящихся напротив свободных парковочных мест (этап S104).
[0056] Если на этапе S104 будет обнаружено, что расположенные подряд свободные парковочные места присутствуют на втором предварительно заданном участке или далее в направлении, в котором простирается зона проезда среди парковочных мест, примыкающих к зоне проезда с одной из сторон - с правой или левой стороны от транспортного средства 10', и заняты парковочные места, примыкающие к зоне проезда с другой из сторон - с левой или правой стороны от транспортного средства 10' и находящиеся напротив свободных парковочных мест («да» на этапе S104), блок 25 расчета маршрута движения рассчитывает маршрут, по которому транспортное средство 10' перемещается вблизи правой или левой стороны зоны проезда (этап S105).
[0057] С другой стороны, если на этапе S104 будет обнаружено, что расположенные подряд свободные парковочные места отсутствуют на втором предварительно заданном участке или далее на любой из сторон - с правой или левой стороны от транспортного средства 10' среди парковочных мест, примыкающих к зоне проезда, или расположенные подряд свободные парковочные места присутствуют на втором предварительно заданном участке или далее не только на одной из сторон - правой или левой стороне от транспортного средства 10', то есть как на правой, так и на левой стороне от транспортного средства 10', среди парковочных мест, которые примыкают к зоне проезда («нет» на этапе S104), блок 25 расчета маршрута движения рассчитывает маршрут, по которому транспортное средство 10' будет перемещаться в середине зоны проезда (этап S106).
[0058] По завершении этапов S103, S105 или S106 верхняя предельная скорость транспортного средства, установленная вычислительным блоком 24 верхней предельной скорости транспортного средства, и маршрут движения, рассчитанный блоком 25 расчета маршрута движения, передаются на транспортное средство 10' посредством блока 21 передачи данных (этап S201).
[0059] Как показано на ФИГ. 7B, вычислительный блок 103 целевого ускорения / замедления транспортного средства 10', которое получило верхнюю предельную скорость транспортного средства и маршрут движения, управляет силовым агрегатом 14 и тормозным приводом 15 таким образом, чтобы скорость транспортного средства 10' не превышала верхнюю предельную скорость транспортного средства (этап S107). Блок 105 рулевого управления управляет приводом 16 рулевого управления таким образом, чтобы транспортное средство 10ґ перемещалось по маршруту движения (этап S107). Параллельно процессу этапа S107 выполняется процесс этапа S108.
Полезные эффекты изобретения
[0060] Устройство 200 помощи водителю в соответствии с настоящим вариантом осуществления позволяет, в частности, снизить вычислительную нагрузку транспортного средства 10'.
Альтернативные варианты осуществления
[0061] В вышеописанном первом и втором вариантах осуществления транспортное средство 10 или транспортное средство 10' движется по парковочной площадке в автоматическом режиме. Тем не менее, соответствующее устройство помощи водителю может быть также применено в случае, когда водитель самостоятельно управляет транспортным средством 10 или транспортным средством 10'.
[0062] В этом случае, например, вычислительный блок 103 целевого ускорения / замедления транспортного средства 10 выполнен с возможностью управления силовым агрегатом 14 и тормозным приводом 15 независимо от степени нажатия на педаль акселератора (не показанной на фигуре) или степени нажатия на педаль тормоза (не показанной на фигуре). Если скорость транспортного средства 10 превышает верхнюю предельную скорость транспортного средства, установленную вычислительным блоком 101 верхней предельной скорости транспортного средства или вычислительным блоком 24 верхней предельной скорости транспортного средства, в результате нажатия водителем транспортного средства 10 педали акселератора, вычислительный блок 103 целевого ускорения / замедления управляет силовым агрегатом 14 таким образом, чтобы скорость транспортного средства 10 не превышала верхнюю предельную скорость транспортного средства.
[0063] Если вычислительный блок 103 целевого ускорения / замедления обнаруживает, что пешеход выбежал перед транспортным средством 10, на основании местоположения пешехода, вычисленного вычислительным блоком 102 местоположения пешехода, вычислительный блок 103 целевого ускорения / замедления управляет тормозным приводом 15 с целью замедления или остановки транспортного средства 10. Например, способ, относящийся к существующему торможению для предотвращения столкновения, необходимо непосредственно применить для управления тормозным приводом 15.
[0064] Маршрут движения, рассчитанный блоком 104 расчета маршрута движения или блоком 25 расчета маршрута движения, может быть доведен до сведения водителя транспортного средства 10 посредством, например, человеко-машинного интерфейса (human machine interface HMI) (не показанного на фигуре) или иного подобного устройства.
[0065] Различные аспекты изобретения, проистекающие из вышеописанных и альтернативных вариантов осуществления, будут раскрыты ниже.
[0066] Устройство помощи водителю в соответствии с первым аспектом изобретения содержит средства получения информации, выполненные с возможностью получения информации о доступных парковочных местах, которая указывает, является ли каждое из множества парковочных мест на парковочной площадке занятым местом или свободным местом; и средства настройки, выполненные с возможностью установки, по меньшей мере, либо скорости транспортного средства, движущегося по парковочной площадке, либо маршрута движения транспортного средства на основе информации о доступных местах. В вышеописанных вариантах осуществления вычислительный блок 101 верхней предельной скорости транспортного средства и вычислительный блок 24 верхней предельной скорости транспортного средства являются примерами средств получения информации, а вычислительный блок 101 верхней предельной скорости транспортного средства, вычислительный блок 24 верхней предельной скорости транспортного средства, блок 104 расчета маршрута движения и блок 25 расчета маршрута движения являются примерами средств настройки.
[0067] Устройство помощи водителю в соответствии со вторым аспектом изобретения, содержит, по меньшей мере, один из электронных блоков управления, выполненный с возможностью: получения информации о доступных местах, которая указывает на парковочную ситуацию каждого из множества парковочных мест на парковочной площадке; установки, по меньшей мере, либо скорости транспортного средства, движущегося по парковочной площадке, либо маршрута движения транспортного средства на основе информации о доступных парковочных местах; и управления приводом таким образом, чтобы транспортное средство двигалось в режиме автоматического рулевого управления, на основе, по меньшей мере, либо скорости, либо маршрута движения.
[0068] Парковочная ситуация, которая указывается в информации о доступности парковочных мест, связана с вероятностью того, пешеход выбежит из-за припаркованного транспортного средства. То есть, если существует достаточно большое число припаркованных транспортных средств, то существует достаточно большое число слепых зон, обусловленных припаркованными транспортными средствами, поэтому водителю подразумеваемого транспортного средства трудно обнаружить пешехода, и существует высокая вероятность того, что пешеход выбежит, не заметив транспортное средство. С другой стороны, если существует относительно небольшое число припаркованных транспортных средств, существует относительно небольшое число слепых зон, обусловленных припаркованными транспортными средствами, поэтому как водителю подразумеваемого транспортного средства, так и пешеходу относительно легко заметить друг друга. Таким образом, устройство помощи водителю, задающее, по меньшей мере, либо скорость подразумеваемого транспортного средства, либо маршрут движения подразумеваемого транспортного средства на основе информации о доступности парковочных мест, способно оказывать помощь при вождении с учетом вероятности выбегания пешехода из-за припаркованного транспортного средства.
[0069] Если устройство помощи водителю закреплено на подразумеваемом транспортном средстве, устройство помощи водителю устанавливает, по меньшей мере, либо скорость, либо маршрут движения для оснащенного транспортного средства, являющегося подразумеваемым транспортным средством, на основании информации о доступности парковочных мест. В альтернативном варианте, если устройство помощи водителю установлено вне подразумеваемого транспортного средства, устройство помощи водителю устанавливает множество транспортных средств, движущихся по парковочной площадке, в качестве подразумеваемых транспортных средств и устанавливает, по меньшей мере, либо скорость, либо маршрут движения на основе информации о доступности парковочных мест для каждого из множества транспортных средств.
[0070] В вышеописанном аспекте средства настройки могут быть выполнены с возможностью: получения информации о количестве занятых мест на основе информации о доступности парковочных мест, причем количеством занятых мест будет считаться число занятых мест среди множества парковочных мест, находящихся в пределах предварительно заданного диапазона от транспортного средства, движущегося по зоне проезда; и установки, по меньшей мере, либо скорости, либо маршрута движения на основе подсчета занятых мест.
[0071] В вышеописанном аспекте средства настройки могут быть выполнены с возможностью: определения количества занятых мест среди множества парковочных мест, примыкающих к зоне проезда; и установки скорости транспортного средства, если количество занятых мест является первым значением, как более низкой скорости, чем скорость транспортного средства, когда количество занятых мест является вторым значением, меньшим, чем первое значение. Второе значение может быть равно нулю.
[0072] В этом аспекте, когда существует относительно большое число припаркованных транспортных средств, скорость подразумеваемого транспортного средства уменьшается по сравнению с тем, когда существует относительно небольшое число припаркованных транспортных средств. Поэтому, даже если пешеход выбежит из-за припаркованного автомобиля, ожидается, что можно избежать столкновения между подразумеваемым транспортным средством и пешеходом.
[0073] В вышеуказанном аспекте средства настройки могут быть выполнены с возможностью: получения первого количества занятых мест в первой группе парковочных мест и второго количества занятых мест во второй группе парковочных мест, причем первая группа парковочных мест содержит множество парковочных мест, примыкающих к зоне проезда с одной стороны в направлении ширины транспортного средства, вторая группа парковочных мест содержит множество парковочных мест, примыкающих к зоне проезда с другой стороны в направлении ширины; и, если первое количество занятых мест меньше второго количества занятых мест, установки маршрута движения таким образом, чтобы транспортное средство двигалось по части зоны проезда, расположенной ближе к первой группе парковочных мест, чем ко второй группе парковочных мест.
[0074] В этом аспекте можно относительно увеличить расстояние между подразумеваемым транспортным средством и припаркованными транспортными средствами на той стороне, на которой число припаркованных транспортных средств относительно велико, и существует относительно высокая вероятность выбегания пешехода. Поэтому, даже если пешеход выбежит из-за припаркованного автомобиля, ожидается, что можно избежать столкновения между подразумеваемым транспортным средством и пешеходом.
[0075] В вышеуказанном аспекте средства настройки могут быть выполнены с возможностью: получения информации о расположенных подряд свободных местах, которая указывает, имеются ли расположенные подряд свободные места, является ли число расположенных подряд свободных мест равным предварительно определенному или больше из расположенных подряд свободных мест в направлении, в котором простирается зона проезда среди парковочных мест, которые примыкают к зоне проезда, транспортном средстве движущемся по зоне проезда; и установки, по меньшей мере, либо скорости, либо маршрута движения на основе информации о расположенных подряд свободных местах.
[0076] В вышеуказанном аспекте средства настройки могут быть выполнены с возможностью установки скорости, когда расположенные подряд свободные места имеются как в первой группе парковочных мест, так и во второй группе парковочных мест, как более низкой скорости, чем скорость, устанавливаемая, когда расположенные подряд свободные места имеются в первой группе парковочных мест и расположенные подряд свободные места отсутствуют во второй группе парковочных мест, причем первая группа парковочных мест содержит парковочные места, примыкающие к зоне проезда с одной стороны в направлении ширины транспортного средства, а вторая группа парковочных мест содержит парковочные места, примыкающие к зоне проезда с другой стороны в направлении ширины транспортного средства. В вышеописанных вариантах осуществления первый предварительно заданный участок соответствует примеру предварительно заданного числа.
[0077] В соответствии с данным аспектом, когда имеется предварительно заданное число или более расположенных подряд свободных мест, где не присутствуют припаркованные транспортные средства (то есть, когда подразумеваемое транспортное средство движется в зоне с относительно высокой видимостью, и существует относительно низкая вероятность, что выбежит пешеход) можно обеспечить плавное движение подразумеваемого транспортного средства.
[0078] В вышеуказанном аспекте средства настройки могут быть выполнены с возможностью установки маршрута движения, если расположенные подряд свободные места имеются в первой группе парковочных мест, и, по меньшей мере, одно из парковочных мест, находящихся напротив расположенных подряд свободных мест, среди находящихся во второй группе парковочных мест, является занятым, таким образом, чтобы транспортное средство двигалось по части зоны проезда, расположенной ближе к первой группе парковочных мест, чем ко второй группе парковочных мест, причем первая группа парковочных мест содержит парковочные места, примыкающие к зоне проезда с одной стороны в направлении ширины транспортного средства, вторая группа парковочных мест содержит парковочные места, примыкающие к зоне проезда с другой стороны в направлении ширины транспортного средства, а первая группа парковочных мест и вторая группа парковочных мест обращены друг к другу. В вышеописанных вариантах осуществления второй предварительно заданный участок соответствует примеру предварительно заданного числа.
[0079] Согласно данному аспекту, поскольку возможно обеспечить движение подразумеваемого транспортного средства в зоне, где имеется относительно низкая вероятность, что выбежит пешеход, можно соответствующим образом снизить вероятность столкновения между подразумеваемым транспортным средством и пешеходом.
[0080] В вышеуказанном аспекте средства получения информации могут быть выполнены с возможностью получения информации о ширине, которая указывает размер зоны проезда в направлении ширины транспортного средства, для транспортного средства, движущегося по зоне проезда, и средства настройки могут быть выполнены с возможностью установки, по меньшей мере, либо скорости, либо маршрута движения транспортного средства на основе информации о доступности парковочных мест и информации о ширине.
[0081] Видимость становится хуже, по мере того, как зона проезда становится уже. То есть, по мере того, как зона проезда становится уже, водителю подразумеваемого транспортного средства становится труднее обнаруживать пешехода, а пешеходу также становится труднее заметить транспортное средство. Иными словами, видимость улучшается по мере того, как зона проезда становится шире. То есть, по мере того, как зона проезда становится шире, как водителю подразумеваемого транспортного средства, так и пешеходу становится легче обнаруживать друг друга. Таким образом, устройство помощи водителю, которое устанавливает, по меньшей мере, либо скорость, либо маршрут движения подразумеваемого транспортного средства на основе информации о доступных парковочных местах и информации о ширине, способно надлежащим образом оказывать помощь при вождении с учетом того, что пешеход выбежит из-за припаркованного транспортного средства.
[0082] В вышеуказанном аспекте устройство помощи водителю может дополнительно содержать средства передачи, выполненные с возможностью передачи, по меньшей мере, либо заданной скорости, либо заданного маршрута движения на транспортное средство, причем устройство помощи водителю размещено вне транспортного средства. В этом аспекте можно снизить вычислительную нагрузку подразумеваемого транспортного средства (то есть вычислительную нагрузку, связанную с заданием скорости и маршрута движения транспортного средства).
[0083] В вышеуказанном аспекте на парковочной площадке может быть предусмотрен, по меньшей мере, один датчик, выполненный с возможностью распознавания, присутствует ли припаркованное транспортное средство на каждом из множества парковочных мест; и информация о доступности парковочных мест может быть сформирована на основе сигнала, выдаваемого указанным датчиком. В этом аспекте можно достаточно легко генерировать информацию о доступности парковочных мест.
[0084] В вышеописанных вариантах осуществления, перемещение транспортного средства по зоне проезда, называют маршрутом движения. В то же время зону проезда, по которому движется транспортное средство, можно определять на основании информации о доступности парковочных мест на парковочной площадке в целом.
[0085] Изобретение не ограничено вышеописанными вариантами осуществления. Изобретение можно изменить по мере необходимости, не выходя за рамки защищаемого объема или сущности изобретения, вытекающих из прилагаемой формулы изобретения и общего описания. В технический объем изобретения входят также устройства помощи водителю, содержащие подобные модификации.
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания

