Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способам управления движением и к устройствам управления движением для управления движением транспортного средства.
Уровень техники
[0002] Известна технология для распознавания разделительных линий, нарисованных на поверхности дороги, заставляющая транспортное средство двигаться вдоль полосы движения, заданной посредством разделительных линий, и когда разделительные линии не распознаются, заставляющая транспортное средство двигаться, следуя за едущим впереди транспортным средством (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент Японии номер 2004-206275
Сущность изобретения
Техническая задача
[0004] Тем не менее, если транспортное средство просто следует за едущим впереди транспортным средством; когда едущее впереди транспортное средство не движется вдоль полосы движения, транспортное средство не может двигаться, оставаясь в предварительно определенной позиции в направлении ширины полосы движения. Это может снижать надежность управления, чтобы заставлять транспортное средство двигаться вдоль полосы движения, что называется "управлением удержанием в полосе движения".
[0005] В свете вышеуказанной проблемы, задача настоящего изобретения заключается в том, чтобы предоставлять способ управления движением и устройство управления движением, которые допускают выполнение управления удержанием в полосе движения с высокой надежностью.
Решение задачи
[0006] Способ управления движением согласно аспекту настоящего изобретения, когда разделительная линия не обнаруживается, отменяет управление удержанием в полосе движения, когда предварительно определенное время проходит после того, как разделительная линия больше не обнаруживается. Предварительно определенное время меньше в случае, когда дистанция следования между рассматриваемым транспортным средством и едущим впереди транспортным средством превышает предварительно определенное значение, чем в случае, когда дистанция следования меньше или равна предварительно определенному значению.
Преимущества изобретения
[0007] Настоящее изобретение повышает надежность управления удержанием в полосе движения.
Краткое описание чертежей
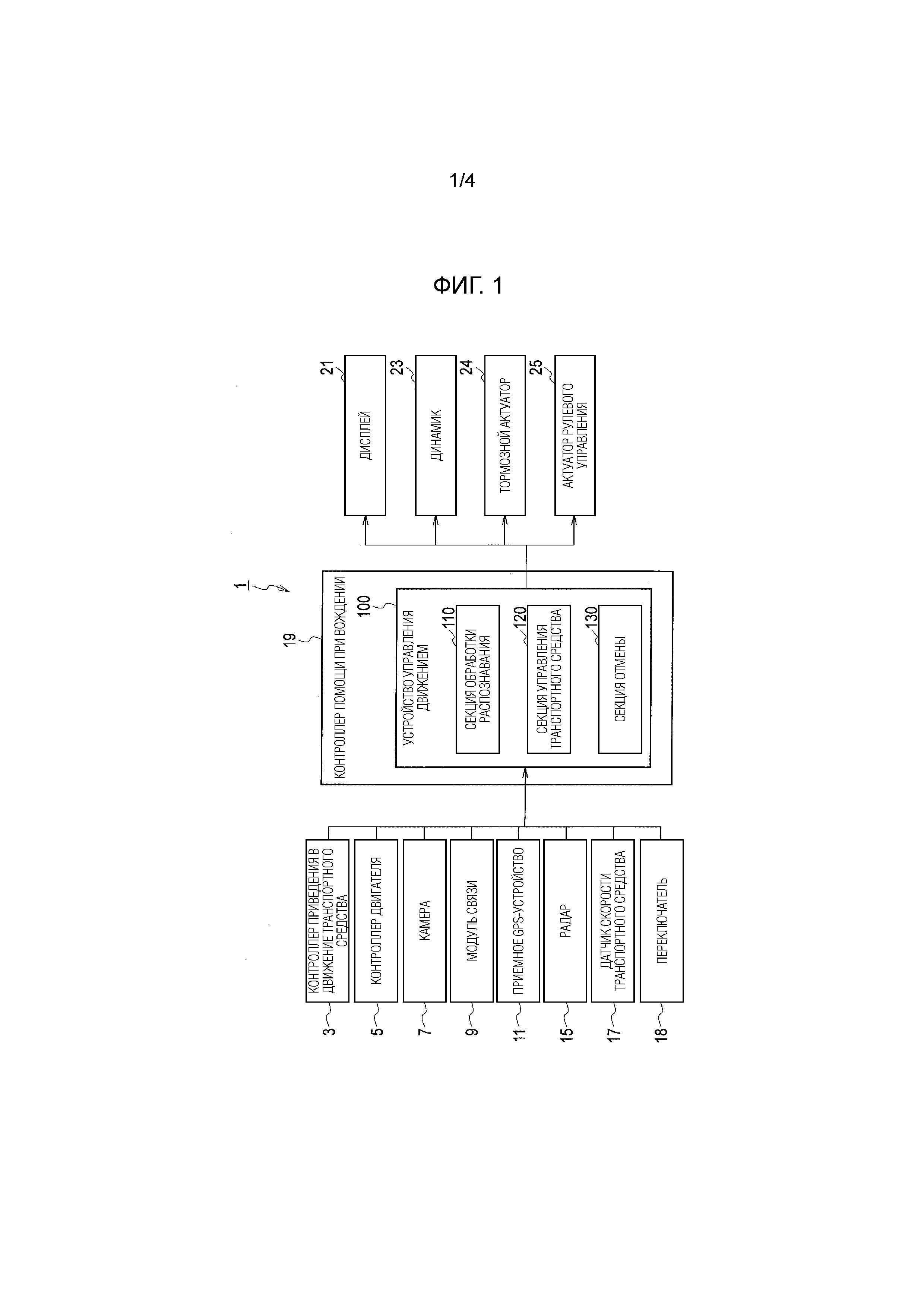
[0008] Фиг. 1 является блок-схемой для пояснения базовой конфигурации устройства управления движением согласно варианту осуществления настоящего изобретения.
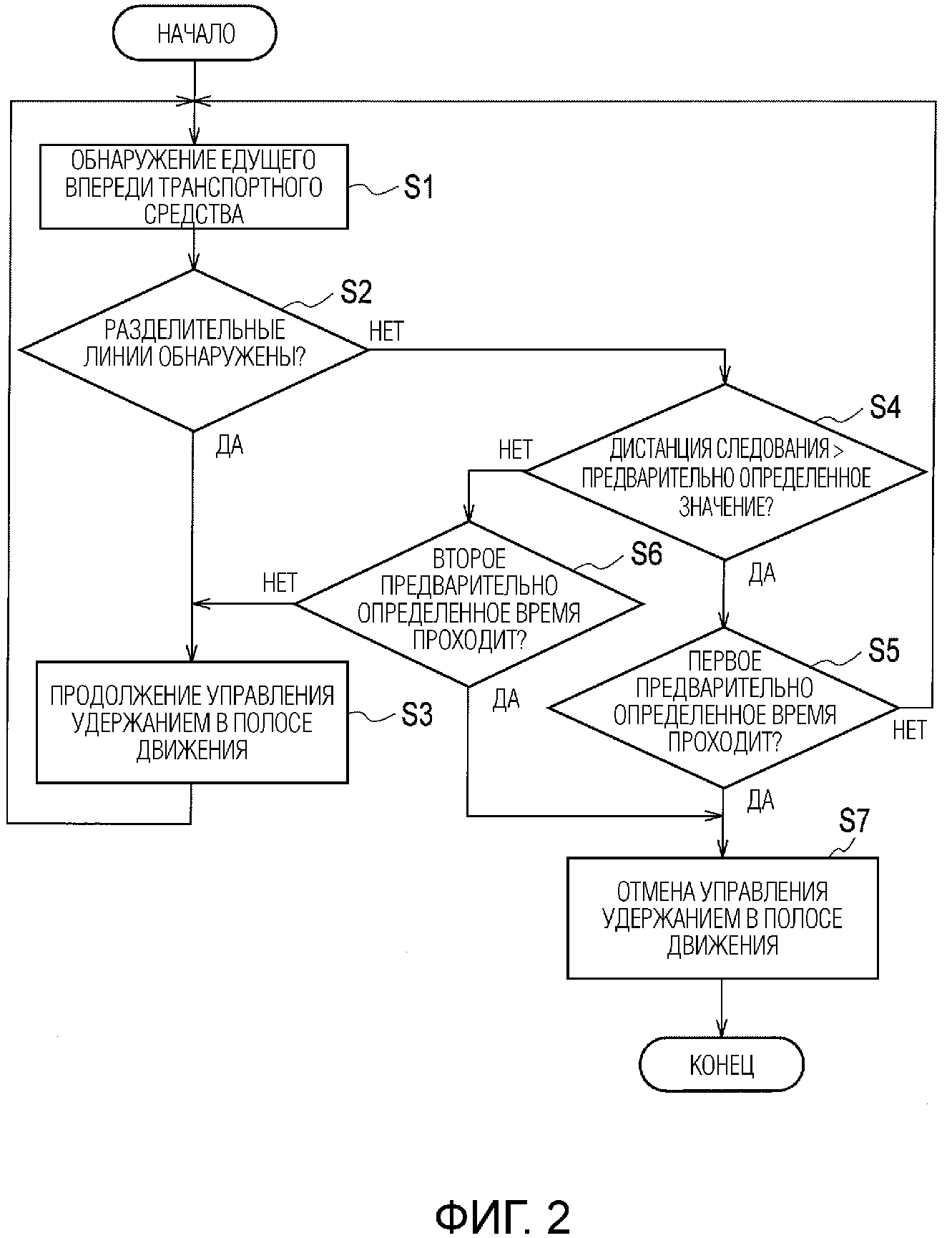
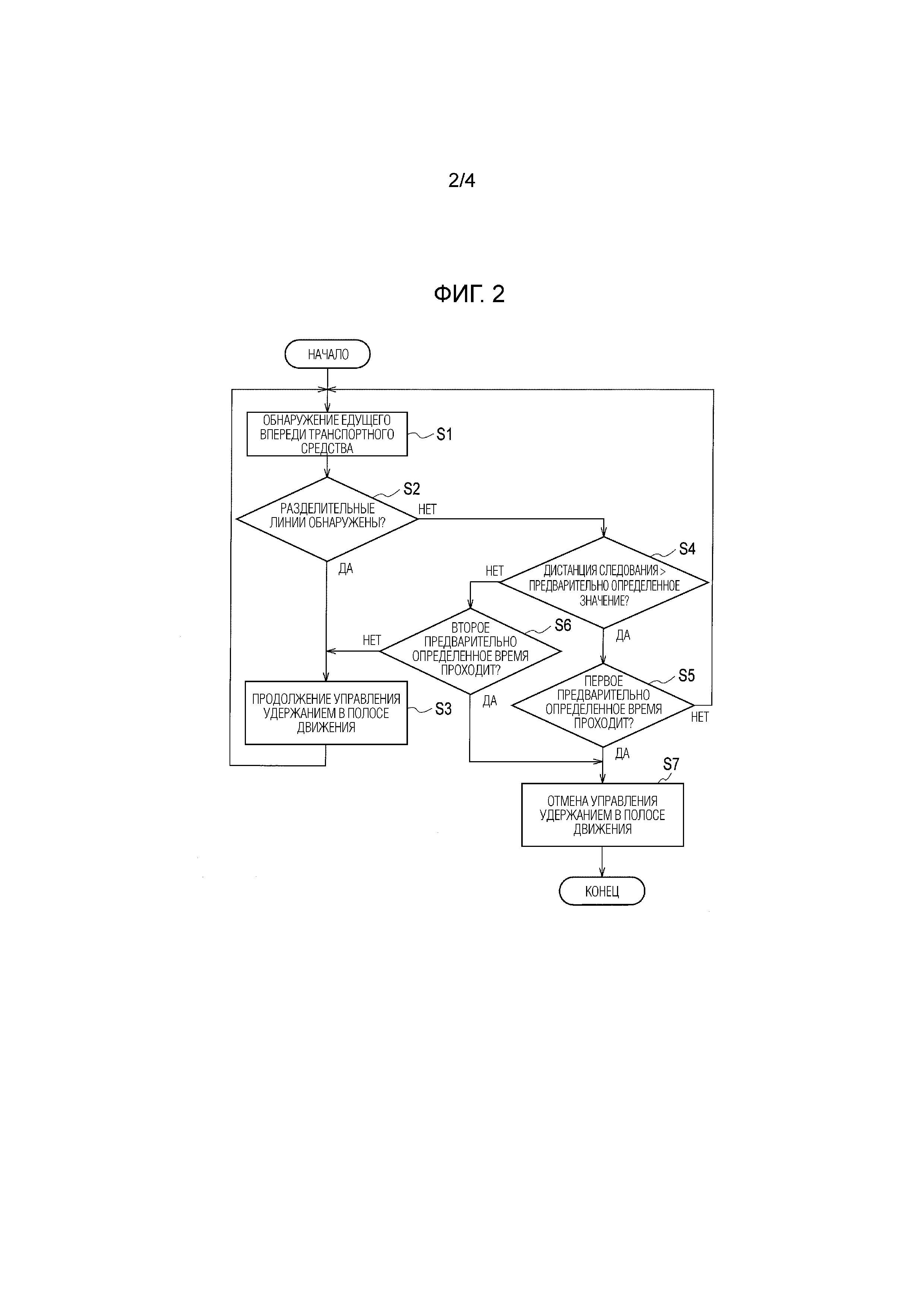
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей пример способа управления движением с использованием устройства управления движением согласно варианту осуществления настоящего изобретения.
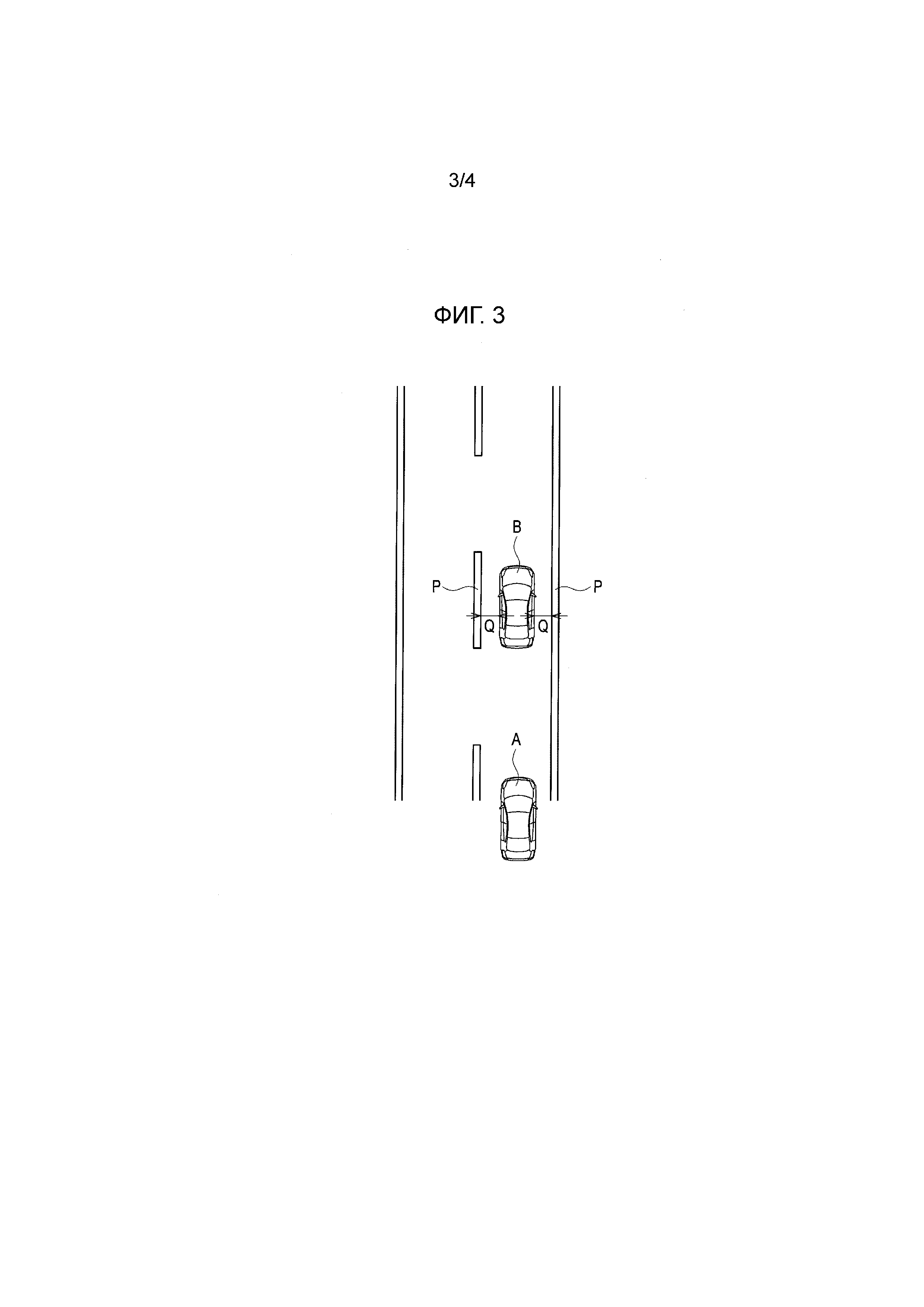
Фиг. 3 является схемой для пояснения примера управления удержанием в полосе движения.
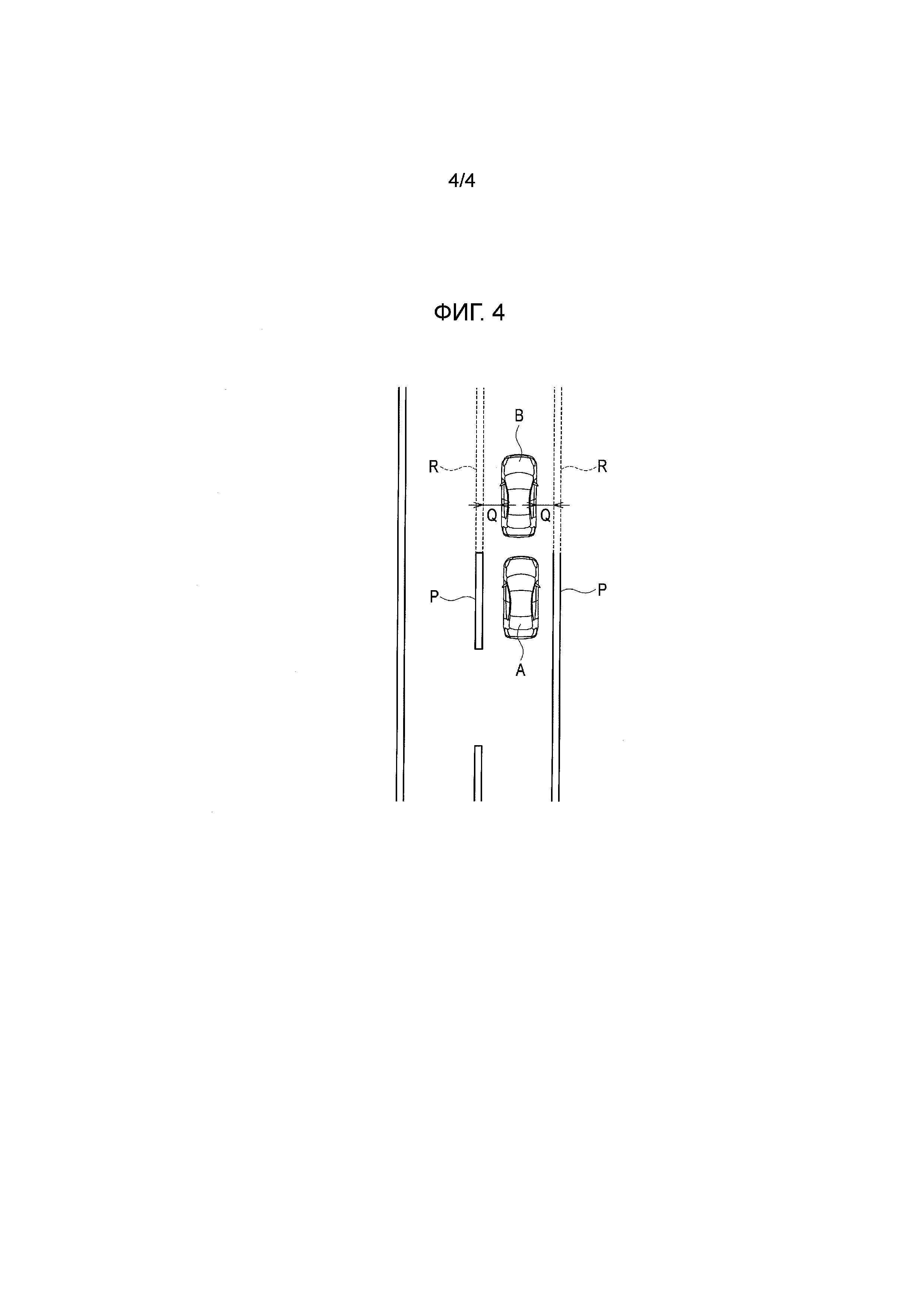
Фиг. 4 является схемой для пояснения примера управления удержанием в полосе движения.
Подробное описание вариантов осуществления
[0009] Далее описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. В иллюстрации на чертежах, идентичные части обозначаются посредством идентичных ссылок с номерами, и их описание опускается.
[0010] Со ссылкой на фиг. 1, ниже предоставляется описание для конфигурации системы 1 управления движением согласно варианту осуществления настоящего изобретения. Как проиллюстрировано, система 1 управления движением включает в себя контроллер 3 приведения в движение транспортного средства, контроллер 5 двигателя, камеру 7, модуль 9 связи, приемное GPS-устройство 11, радар 15, датчик 17 скорости транспортного средства и переключатель 18. Система 1 управления движением также включает в себя контроллер 19 помощи при вождении, дисплей 21, динамик (громкоговоритель) 23, тормозной актуатор (исполнительный механизм) 24 и актуатор 25 рулевого управления. Система 1 управления движением монтируется на рассматриваемом транспортном средстве, которое оснащено системой, которая обеспечивает возможность рассматриваемому транспортному средству двигаться со следованием за едущим впереди транспортным средством впереди рассматриваемого транспортного средства, такой как адаптивная система автоматического поддержания скорости. В этом варианте осуществления, едущее впереди транспортное средство означает транспортное средство, которое позиционируется впереди рассматриваемого транспортного средства, а также в полосе движения, в которой движется рассматриваемое транспортное средство.
[0011] Контроллер 3 приведения в движение транспортного средства управляет приведением в движение транспортного средства, к примеру, антиблокировочной тормозной системой, системой регулирования тяги и системой управления динамикой транспортного средства. Контроллер 5 двигателя управляет двигателем. Камера 7 представляет собой датчик изображений, который захватывает изображения области впереди рассматриваемого транспортного средства и получает изображения, включающие в себя едущее впереди транспортное средство и разделительные линии полосы движения. Изображения, полученные посредством камеры 7, используются для получения такой информации, как дистанция следования и относительная скорость относительно едущего впереди транспортного средства и позиций разделительных линий. Модуль 9 связи представляет собой устройство связи, которое выполняет передачу и прием для услуг обмена информацией с использованием связи между транспортным средством и дорожной инфраструктурой или мобильных телефонных линий. Приемное GPS-устройство 11 принимает информацию относительно широты, долготы и высоты над уровнем моря рассматриваемого транспортного средства из спутников. Радар 15 измеряет дистанцию следования и относительную скорость между едущим впереди транспортным средством и рассматриваемым транспортным средством с использованием, например, датчика миллиметрового диапазона. Датчик 17 скорости транспортного средства измеряет скорость транспортного средства для рассматриваемого транспортного средства. Переключатель 18 представляет собой переключатель для переключения между режимом управления удержанием в полосе движения и режимом вождения вручную, причем режим удержания в полосе движения представляет собой режим, в котором движение рассматриваемого транспортного средства управляется таким образом, что рассматриваемое транспортное средство движется в предварительно определенной позиции относительно разделительных линий полосы движения, в которой движется рассматриваемое транспортное средство, причем режим вождения вручную представляет собой режим, в котором движение рассматриваемого транспортного средства не управляется. Переключатель 18 управляется водителем рассматриваемого транспортного средства. Следует отметить, что режим удержания в полосе движения также переключается на режим вождения вручную посредством вмешательства водителя в операцию вождения. После этого, когда предварительно определенное время проходит после того, как вмешательство водителя завершается, устройство 100 управления движением возобновляет управление движением. Другими словами, устройство 100 управления движением переключает режим с режима вождения вручную на режим управления удержанием в полосе движения без работы переключателя 18.
[0012] Контроллер 19 помощи при вождении управляет системами помощи при вождении, такими как адаптивная система автоматического поддержания скорости, экстренные тормоза и автоудерживаемые тормоза. Контроллер 19 помощи при вождении может включать в себя систему для адаптивного автоматического поддержания скорости с добавленной функцией управления рулением. С использованием камеры 7 и радара 15, контроллер 19 помощи при вождении обнаруживает присутствие едущего впереди транспортного средства и разделительных линий (обнаружение полосы движения), измеряет дистанцию следования и поперечную позицию едущего впереди транспортного средства относительно рассматриваемого транспортного средства или разделительных линий и отправляет инструкции в контроллер 5 двигателя, тормозной актуатор 24, актуатор 25 рулевого управления и т.п., чтобы управлять ускорением или замедлением и рулением рассматриваемого транспортного средства. Контроллер 19 помощи при вождении, когда отсутствуют едущие впереди транспортные средства, выполняет управление скоростью транспортного средства, которое обеспечивает возможность рассматриваемому транспортному средству двигаться с сохранением заданной скорости транспортного средства, и когда имеется едущее впереди транспортное средство, выполняет управление сохранением дистанции следования, которое обеспечивает возможность рассматриваемому транспортному средству двигаться с сохранением дистанции следования относительно едущего впереди транспортного средства постоянной. Когда едущее впереди транспортное средство останавливается, контроллер 19 помощи при вождении также останавливает рассматриваемое транспортное средство и выполняет управление поддержанием остановки. Следует отметить, что в этом варианте осуществления, описание предоставляется в качестве примера для системы помощи при вождении, которая подразумевает операции водителя, но настоящее изобретение также может быть применимым к системе автоматизированного вождения с меньшим приспособлением операций водителя.
[0013] Дисплей 21 отображает состояния систем, таких как адаптивная система автоматического поддержания скорости, экстренные тормоза и автоудерживаемые тормоза. Динамик 23 выводит звук, когда адаптивная система автоматического поддержания скорости, экстренные тормоза, автоудерживаемые тормоза и т.п. представляют информацию или выдают оповещение. Тормозной актуатор 24 выполняет операции нажатия педали тормоза для управления торможением рассматриваемого транспортного средства согласно инструкциям из контроллера 19 помощи при вождении. Актуатор 25 рулевого управления выполняет операции руления для управления поперечной позицией рассматриваемого транспортного средства согласно инструкциям из контроллера 19 помощи при вождении.
[0014] Устройство 100 управления движением монтируется на рассматриваемом транспортном средстве в качестве контроллера, интегрированного с контроллером 19 помощи при вождении. Устройство 100 управления движением распознает полосу движения, в которой движется рассматриваемое транспортное средство, и управляет движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство находится в предварительно определенной позиции относительно разделительных линий полосы движения (например, в центре правой и левой разделительных линий). В частности, устройство 100 управления движением управляет, по меньшей мере, одним из рулевого управления и торможения транспортного средства таким образом, что поперечная позиция рассматриваемого транспортного средства находится в предварительно определенной позиции относительно разделительных линий полосы движения. Здесь, описание продолжается с рассмотрением, в качестве примера, случая, в котором устройство 100 управления движением осуществляет рулевое управление транспортного средства посредством передачи управляющих сигналов в актуатор 25 рулевого управления. В этом варианте осуществления, управление удержанием в полосе движения задается как распознавание полосы движения, в которой движется рассматриваемое транспортное средство, и управление движением рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство находится в предварительно определенной позиции относительно разделительных линий полосы движения.
[0015] Устройство 100 управления движением, например, представляет собой микрокомпьютер общего назначения, включающий в себя центральный процессор (CPU), запоминающее устройство и модуль ввода-вывода. Компьютерная программа (программа управления движением) для инструктирования микрокомпьютеру функционировать в качестве устройства 100 управления движением устанавливается в микрокомпьютере и выполняется. Это инструктирует микрокомпьютеру общего назначения функционировать в качестве устройства 100 управления движением. Следует отметить, что хотя здесь описание предоставляется для примера, в котором устройство 100 управления движением реализуется посредством программного обеспечения, очевидно, что устройство 100 управления движением может быть сконфигурировано посредством подготовки специализированных аппаратных средств для выполнения каждого информационного процесса, описанного ниже. Помимо этого, модули (110, 120 и 130), включенные в устройство 100 управления движением, могут реализовываться посредством отдельных элементов аппаратных средств. Дополнительно, не только устройство 100 управления движением, но также и каждый из контроллера 3 приведения в движение транспортного средства, контроллера 5 двигателя и контроллера 19 помощи при вождении могут реализовываться посредством программного обеспечения или специализированных аппаратных средств аналогичным образом. Кроме того, устройство 100 управления движением также может служить в качестве электронного модуля управления (ECU), используемого для другого управления, связанного с транспортным средством.
[0016] Устройство 100 управления движением включает в себя секцию 110 обработки распознавания, секцию 120 управления транспортного средства и секцию 130 отмены.
[0017] Секция 110 обработки распознавания распознает разделительные линии, которые задают полосу движения, в которой движется рассматриваемое транспортное средство, из изображений, полученных посредством камеры 7.
[0018] Секция 120 управления транспортного средства управляет движением рассматриваемого транспортного средства, например, рулением рассматриваемого транспортного средства управляется таким образом, что поперечная позиция рассматриваемого транспортного средства относительно разделительных линий, распознанных посредством секции 110 обработки распознавания, находится в предварительно определенной позиции. В частности, секция 120 управления транспортного средства передает управляющие сигналы в актуатор 25 рулевого управления, чтобы управлять крутящим моментом поворота при рулении, выводимым посредством актуатора 25 рулевого управления. Это обеспечивает возможность устройству 100 управления движением осуществлять рулевое управление рассматриваемого транспортного средства.
[0019] Секция 130 отмены отменяет управление удержанием в полосе движения, когда секция 110 обработки распознавания не обнаруживает разделительные линии. Здесь, время после того, как секция 110 обработки распознавания больше не обнаруживает разделительные линии до тех пор, пока секция 130 отмены не отменит управление удержанием в полосе движения, отличается в зависимости от того, превышает дистанция следования между рассматриваемым транспортным средством и едущим впереди транспортным средством предварительно определенное значение (например, 7-8 м) либо меньше или равна предварительно определенному значению. В частности, время до тех пор, пока секция 130 отмены не отменит управление удержанием в полосе движения, является большим, когда дистанция следования между рассматриваемым транспортным средством и едущим впереди транспортным средством меньше или равна предварительно определенному значению, и оно является меньшим, когда дистанция следования превышает предварительно определенное значение. Ниже подробнее описывается этот аспект. Следует отметить, что время после того, как секция 110 обработки распознавания больше не обнаруживает разделительные линии, до тех пор, пока секция 130 отмены не отменит управление удержанием в полосе движения, называется просто временем отмены. Помимо этого, если не указано иное, дистанция следования представляет собой дистанцию следования между рассматриваемым транспортным средством и едущим впереди транспортным средством.
[0020] Во-первых, ниже предоставляется описание для случая, в котором дистанция следования превышает предварительно определенное значение.
Окружение, в котором дистанция следования является большой, например, представляет собой окружение, в котором рассматриваемое транспортное средство движется на шоссе, и дистанция следования является достаточно большой. В таком окружении, маловероятно, что едущее впереди транспортное средство скрывает разделительные линии, и имеется высокая вероятность того, что разделительные линии полосы движения, в которой движется рассматриваемое транспортное средство, включены в угол обзора камеры 7. Несмотря на это, когда секция 110 обработки распознавания по-прежнему не обнаруживает разделительные линии, имеется вероятность того, что обнаружение камеры 7 не работает надлежащим образом. Например, факторы, которые препятствуют обнаружению камеры 7, представляют собой окружение вождения (такое как свет, падающий сзади, дождь и туман) и состояние полос движения (такое как размытость и грязь). По этой причине, когда дистанция следования превышает предварительно определенное значение, и секция 110 обработки распознавания не обнаруживает разделительные линии в течение первого предварительно определенного времени, секция 130 отмены отменяет управление удержанием в полосе движения. Причина, по которой секция 130 отмены ожидает в течение первого предварительно определенного времени, заключается в том, что учитывается время, требуемое для того, чтобы обнаруживать разделительные линии, поскольку интервалы разделительных линий (пунктирных линий) длиннее на шоссе, чем интервалы разделительных линий местных дорог.
[0021] Далее предоставляется описание для случая, в котором дистанция следования меньше или равна предварительно определенному значению, другими словами, дистанция следования является небольшой. Примеры окружений, в которых дистанция следования является небольшой, включают в себя, например, окружение, в котором рассматриваемое транспортное средство стоит на месте на перекрестке или в заторе в движении, и окружение, в котором рассматриваемое транспортное средство движется на низкой скорости. В таких окружениях, едущее впереди транспортное средство скрывает разделительные линии в некоторых случаях, и разделительные линии полосы движения, в которой движется рассматриваемое транспортное средство, могут не быть включены в угол обзора камеры 7. В этом случае, секция 110 обработки распознавания не может распознавать разделительные линии. Тем не менее, даже в таком случае, предусмотрен способ, который предоставляет возможность продолжения управления удержанием в полосе движения некоторое время. В дальнейшем описывается этот способ с использованием фиг. 3 и 4. В окружении, проиллюстрированном на фиг. 3, едущее впереди транспортное средство B движется в предварительно определенном диапазоне расстояний впереди рассматриваемого транспортного средства в полосе движения, в которой движется рассматриваемое транспортное средство A. В окружении, проиллюстрированном на фиг. 3, позиционная взаимосвязь между едущим впереди транспортным средством B и разделительными линиями P сохраняется в компьютере заранее с использованием камеры 7 и т.п. и на основе этой позиционной взаимосвязи, воображаемые разделительные линии оцениваются посредством компьютера из текущей позиции едущего впереди транспортного средства B. В частности, как проиллюстрировано на фиг. 4, компьютер оценивает то, что воображаемые разделительные линии R, протягивающиеся вдоль направления движения рассматриваемого транспортного средства A или едущего впереди транспортного средства B, находятся в позициях на расстояниях Q от сторон едущего впереди транспортного средства B. Затем движение рассматриваемого транспортного средства управляется таким образом, что поперечная позиция рассматриваемого транспортного средства находится в предварительно определенной позиции относительно оцененных воображаемых разделительных линий R. Альтернативно, при условии, что позиция едущего впереди транспортного средства находится в пределах полосы движения, движение рассматриваемого транспортного средства может управляться таким образом, что поперечная позиция рассматриваемого транспортного средства находится в предварительно определенной позиции в центре едущего впереди транспортного средства в направлении ширины транспортного средства. Это обеспечивает возможность рассматриваемому транспортному средству продолжать управление удержанием в полосе движения, даже когда секция 110 обработки распознавания не распознает разделительные линии. Между тем, может иметь место то, что в то время, когда движение рассматриваемого транспортного средства управляется относительно воображаемых разделительных линий, угол обзора камеры 7 становится таким, что он включает в себя разделительные линии, и секция 110 обработки распознавания снова обнаруживает разделительные линии. По этим причинам, время отмены может быть большим в случае, когда дистанция следования меньше или равна предварительно определенному значению, чем в случае, когда дистанция следования превышает предварительно определенное значение. Таким образом, когда дистанция следования меньше или равна предварительно определенному значению, и секция 110 обработки распознавания не распознает разделительные линии в течение второго предварительно определенного времени, секция 130 отмены отменяет управление удержанием в полосе движения. Здесь, второе предварительно определенное время превышает первое предварительно определенное время.
[0022] Когда секция 130 отмены отменяет управление удержанием в полосе движения, контроллер 19 помощи при вождении может сообщить водителю относительно отмены управления удержанием в полосе движения через дисплей 21 или динамик 23.
[0023] Далее, со ссылкой на фиг. 2, предоставляется описание для примера способа управления движением с использованием устройства 100 управления движением. Последовательность процессов, проиллюстрированных на блок-схеме последовательности операций способа по фиг. 2, начинается, когда водитель нажимает переключатель 18, чтобы переключать режим в режим управления удержанием в полосе движения. Следует отметить, что на этой блок-схеме последовательности операций способа, предполагается, что впереди рассматриваемого транспортного средства имеется едущее впереди транспортное средство.
[0024] На этапе S1, секция 110 обработки распознавания обнаруживает едущее впереди транспортное средство впереди рассматриваемого транспортного средства, с использованием, по меньшей мере, изображений, полученных посредством камеры 7, или данных, полученных посредством радара 15. Секция 110 обработки распознавания также определяет дистанцию следования между рассматриваемым транспортным средством и едущим впереди транспортным средством.
[0025] На этапе S2, секция 110 обработки распознавания распознает разделительные линии полосы движения, в которой движется рассматриваемое транспортное средство, из изображений, полученных посредством камеры 7, которая захватывает изображения области впереди рассматриваемого транспортного средства. Если секция 110 обработки распознавания распознает разделительные линии ("Да" на этапе S2), обработка переходит к этапу S3. С другой стороны, если секция 110 обработки распознавания не распознает разделительные линии ("Нет" на этапе S2), процесс переходит к этапу S4.
[0026] На этапе S3, секция 120 управления транспортного средства продолжает управление удержанием в полосе движения на основе разделительных линий, распознанных на этапе S2.
[0027] На этапе S4, секция 130 отмены оценивает то, превышает или нет дистанция следования между рассматриваемым транспортным средством и едущим впереди транспортным средством предварительно определенное значение. Если дистанция следования превышает предварительно определенное значение ("Да" на этапе S4), процесс переходит к этапу S5. С другой стороны, если дистанция следования меньше или равно предварительно определенного значения ("Нет" на этапе S4), процесс переходит к этапу S6.
[0028] На этапе S5, секция 130 отмены оценивает то, проходит или нет первое предварительно определенное время. Если первое предварительно определенное время проходит ("Да" на этапе S5), процесс переходит к этапу S7. С другой стороны, если первое предварительно определенное время не проходит ("Нет" на этапе S5), процесс возвращается к этапу S1.
[0029] На этапе S6, секция 130 отмены оценивает то, проходит или нет второе предварительно определенное время. Если второе предварительно определенное время проходит ("Да" на этапе S6), процесс переходит к этапу S7. С другой стороны, если второе предварительно определенное время не проходит ("Нет" на этапе S6), процесс переходит к этапу S3.
[0030] На этапе S7, секция 130 отмены отменяет управление удержанием в полосе движения.
[0031] Как описано выше, устройство 100 управления движением согласно этому варианту осуществления предоставляет следующее функциональное преимущество.
[0032] Когда секция 110 обработки распознавания не распознает разделительные линии, секция 130 отмены отменяет управление удержанием в полосе движения после того, как проходит предварительно определенное время. Время после того, как секция 110 обработки распознавания больше не обнаруживает разделительные линии до тех пор, пока секция 130 отмены не отменит управление удержанием в полосе движения, меньше в случае, когда дистанция следования между рассматриваемым транспортным средством и едущим впереди транспортным средством превышает предварительно определенное значение, чем в случае, когда она меньше или равна предварительно определенному значению. Когда есть возможность того, что разделительные линии не обнаруживаются вследствие некоторого фактора в аппаратных средствах, секция 130 отмены отменяет управление удержанием в полосе движения после того, как проходит первое предварительно определенное время (меньшее время). Помимо этого, когда секция 110 обработки распознавания больше не обнаруживает разделительные линии, секция 130 отмены не отменяет управление удержанием в полосе движения до тех пор, пока не проходит второе предварительно определенное время (большее время). В этом случае, устройство 100 управления движением выполняет управление удержанием в полосе движения с использованием информации относительно едущего впереди транспортного средства. Если секция 110 обработки распознавания в итоге распознает разделительные линии до того, как второе предварительно определенное время проходит, устройство 100 управления движением может продолжать управление удержанием в полосе движения без его отмены. Это обеспечивает возможность устройству 100 управления движением повышать надежность при управлении удержанием в полосе движения.
[0033] Хотя выше описан вариант осуществления настоящего изобретения, не следует понимать, что описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Из этого раскрытия сущности, различные альтернативы, примеры и технологии работы должны становиться очевидными для специалистов в данной области техники.
[0034] Например, секция 120 управления транспортного средства может использовать тормозной актуатор 24 вместо актуатора 25 рулевого управления, чтобы выполнять управление, эквивалентное рулению рассматриваемого транспортного средства. Другими словами, тормозной актуатор 24 может поворачивать рассматриваемое транспортное средство вправо или влево посредством применения правого и левого тормозов асимметрично в то время, когда рассматриваемое транспортное средство движется.
[0035] Помимо этого, разделительные линии, которые распознает секция 110 обработки распознавания, не ограничены разделительными линиями, нарисованными на поверхности дороги, а только должны представлять собой границы полосы движения. В частности, примеры разделительных линий, которые распознает секция 110 обработки распознавания, включают в себя дорожные сооружения, к примеру, обочины дороги, бордюрные камни и дорожные ограждения. В случае распознавания трехмерных разделительных линий, к примеру, бордюрных камней, секция 110 обработки распознавания может распознавать разделительные линии из трехмерных данных измерения расстояния, полученных посредством радара 15.
[0036] В этом варианте осуществления, описание предоставлено с рассмотрением дистанции следования в качестве условия для того, чтобы отменять управление удержанием в полосе движения. Хотя эта дистанция следования обнаруживается посредством камеры 7 или радара 15, другие способы могут использоваться для оценки дистанции следования. Например, когда скорость транспортного средства, измеряемая посредством датчика 17 скорости транспортного средства, выше предварительно определенной скорости транспортного средства, дистанция следования может оцениваться как превышающая предварительно определенное значение, и когда она ниже или равна предварительно определенной скорости транспортного средства, дистанция следования может оцениваться как меньшая или равная предварительно определенному значению. Альтернативно, секция 130 отмены может отменять управление удержанием в полосе движения с использованием скорости транспортного средства для рассматриваемого транспортного средства. В этом случае, время отмены задается большим, когда скорость транспортного средства для рассматриваемого транспортного средства ниже или равна предварительно определенному значению, и задается меньшим, когда скорость транспортного средства выше предварительно определенного значения.
Помимо этого, после того, как управление удержанием в полосе движения отменяется, могут запускаться другие системы помощи при вождении, такие как управление движением в режиме "ехать за" для придерживания поперечного перемещения едущего впереди транспортного средства, движущегося впереди рассматриваемого транспортного средства. После того, как управление удержанием в полосе движения отменяется, предпочтительно продолжать систему помощи при вождении, переключение на управление движением в режиме "ехать за", в частности, только в случае, когда скорость транспортного средства для рассматриваемого транспортного средства ниже или равна предварительно определенной скорости транспортного средства.
[0037] Функции, описанные в вышеприведенном варианте осуществления, могут реализовываться посредством одной или более схем обработки. Примеры схем обработки включают в себя программируемые обрабатывающие устройства, такие как обрабатывающие устройства, включающие в себя электрические схемы. Примеры схем обработки включают в себя такие устройства, как специализированная интегральная схема (ASIC), выполненная с возможностью выполнять описанные функции, и схемные части.
[0038] Содержимое заявки на патент Японии № 2016-138032 (поданной 12 июля 2016 года) полностью содержится в данном документе по ссылке.
Список позиционных обозначений
[0039] 1 - система управления движением
3 - контроллер приведения в движение транспортного средства
5 - контроллер двигателя
7 - камера
9 - модуль связи
11 - приемное устройство
15 - радар
17 - датчик скорости транспортного средства
18 - переключатель
19 - контроллер помощи при вождении
21 - дисплей
23 - динамик
24 - тормозной актуатор
25 - актуатор рулевого управления
100 - устройство управления движением
110 - секция обработки распознавания (схема обработки распознавания)
120 - секция управления транспортного средства (схема управления транспортного средства)
130 - секция отмены (схема отмены).
Устройство управления и способ управления гибридного транспортного средства
Устройство представления информации транспортного средства
Устройство управления гибридного транспортного средства
Устройство вычисления собственной позиции и способ вычисления собственной позиции
Устройство обнаружения светофоров и способ обнаружения светофоров
Устройство управления и способ управления для двигателей внутреннего сгорания
Устройство вычисления собственной позиции и способ вычисления собственной позиции
Устройство наклона спинки сиденья
Устройство вычисления собственного местоположения и способ вычисления собственного местоположения
Устройство вычисления собственной позиции и способ вычисления собственной позиции
Устройство управления движением и способ управления движением

