Результат интеллектуальной деятельности: НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может найти применение в системах навигации подвижных объектов - в беспилотных летательных аппаратах, в автопилотах авиа- и судомоделей и мобильных комплексах авианаблюдений за морскими, воздушными и наземными объектами. В частности заявляемое изобретение может быть использовано в авиационно-космических пилотажных системах управления при измерении угловых скоростей и линейных ускорений, например, в составе системы управления движением космического аппарата.
Известно техническое решение бесплатформенного инерциального измерительного блока [Патент РФ на изобретение 2058534, МПК: G01C 21/00], содержащего основание, гироскопы-акселерометры, установленные на его базовых плоскостях, сервисные электронные блоки, источники постоянного и переменного токов. В качестве гироскопов-акселерометров применены микромеханические вибрационные гироскопы-акселерометры, содержащие чувствительные элементы, электроды возбуждения колебаний чувствительных элементов и электроды съема информации, при этом основание блока выполнено в форме параллелепипеда с базовыми плоскостями по его граням и внутренней полостью, электроды возбуждения колебаний чувствительных элементов и электроды съема информации выполнены на основании, а основание закреплено на подложке, содержащей микросборки сервисной электроники. Источник постоянного тока размещен в полости основания, а датчик температуры установлен на одной из плоскостей основания. Между основанием и подложкой установлена равножесткая по всем трем осям упругая прокладка, собственная частота которой ниже собственных частот гироскопов-акселерометров.
2058534, МПК: G01C 21/00], содержащего основание, гироскопы-акселерометры, установленные на его базовых плоскостях, сервисные электронные блоки, источники постоянного и переменного токов. В качестве гироскопов-акселерометров применены микромеханические вибрационные гироскопы-акселерометры, содержащие чувствительные элементы, электроды возбуждения колебаний чувствительных элементов и электроды съема информации, при этом основание блока выполнено в форме параллелепипеда с базовыми плоскостями по его граням и внутренней полостью, электроды возбуждения колебаний чувствительных элементов и электроды съема информации выполнены на основании, а основание закреплено на подложке, содержащей микросборки сервисной электроники. Источник постоянного тока размещен в полости основания, а датчик температуры установлен на одной из плоскостей основания. Между основанием и подложкой установлена равножесткая по всем трем осям упругая прокладка, собственная частота которой ниже собственных частот гироскопов-акселерометров.
Недостатками данного решения являются большие габариты и масса, а также невысокая надежность конструкции.
Известно техническое решение бесплатформенного инерциального измерительного блока [Патент РФ на изобретение 2162203, МПК: G01C 21/00], содержащего микромеханические вибрационные гироскопы-акселерометры с электродами возбуждения колебаний и съема информации с чувствительных элементов и датчик температуры, размещенные на основании, закрепленном на подложке, на которой установлены микросборки сервисной электроники. Подложка выполнена в виде платы из диэлектрика, а основание - в виде правильной шестиугольной усеченной пирамиды, по меньшей мере, на трех боковых гранях которой размещены чувствительные элементы микромеханических вибрационных гироскопов-акселерометров, а на меньшей торцевой грани - датчик температуры, при этом основание по плоскости большей торцевой грани закреплено в центральной части подложки, а микросборки сервисной электроники установлены вокруг основания по периферии подложки и выполнены по тонкопленочной технологии. Подложка размещена в защитном корпусе с двусторонней разводкой выводов микросборок сервисной электроники в плоскости, параллельной плоскости большей торцевой грани основания. Пирамида основания выполнена с углом наклона плоскостей боковых граней к плоскости большей торцевой грани в диапазоне от 54,76°-0,5° до 54,76°+0,5°.
Однако данное техническое решение характеризуется сложностью конструкции, а также сравнительно высокими массогабаритными характеристиками и невысокой стойкостью к внешним воздействиям.
Известна малогабаритная инерциальная система управления движением (Патент РФ на полезную модель 73475, МПК: G01C 21/00), содержащая микромеханический инерциальный измерительный блок, включающий микромеханические гироскопы и акселерометры, микросборки сервисной электроники, и блок управления, включающий плату вычислителя, источник вторичного электропитания, плату аналого-цифрового и цифроаналогового преобразователей, плату автономного контроля, первую и вторую платы интерфейсов, несущие рамки, крышки, рулевой привод и корпус. Корпус выполнен в виде несущего кронштейна, имеющего форму куба с внутренней полостью и базовыми плоскостями по его граням, на которых с помощью несущих рамок и крышек крепятся платы блока управления. Микромеханический инерциальный измерительный блок крепится во внутренней полости в центре несущего кронштейна. Микромеханические гироскопы и акселерометры, входящие в микромеханический инерциальный измерительный блок, выполнены в капсульном исполнении.
Однако данная конструкция характеризуется наличием соединительных кабелей и необходимостью установки дополнительного кожуха для защиты радиоэлементов от внешних воздействий, что негативно влияет на массогабаритные характеристики системы.
Наиболее близкой к заявляемым техническим решениям является бесплатформенная инерциальная навигационная система (Патент РФ на полезную модель 75033, МПК: G01C 21/00), содержащая три микромеханических гироскопа, три микромеханических акселерометра, микросборки сервисной электроники, фланцы и блок плат, включающий плату интерфейса, плату контроллера, первую, вторую и третью платы аналого-цифрового преобразователя, крышку и корпус. Корпус в данном техническом решении выполнен в виде несущего кронштейна, имеющего форму шестигранника с внутренней полостью и базовыми плоскостями по его граням, на которых с помощью фланцев крепятся три микромеханических гироскопа и три микромеханических акселерометра с микросборками сервисной электроники. Блок плат, включающий плату интерфейса, плату контроллера, первую, вторую и третью платы аналого-цифрового преобразователя, крепится на внутренней плоскости в центре несущего кронштейна. Внутренняя полость, содержащая блок плат, заполняется компаундом. Микромеханические гироскопы и акселерометры выполнены в капсульном исполнении.
Однако перечисленные выше недостатки характерны и для данного технического решения.
Задачей группы изобретений является создание навигационной системы, представляющей собой инерциальный измерительный блок с высокими показателями точности и надежности.
Технический результат заключается в повышении точностных характеристик устройства и в повышении надежности работы навигационной системы.
Поставленная задача решается тем, что навигационная система содержит корпус, четыре волоконно-оптических гироскопа, четыре угловых акселерометра, четыре линейных акселерометра и блок электроники, расположенный в полости корпуса, при этом корпус имеет форму, приближенную к четырехгранной усеченной пирамиде, c внутренней полостью и гнёздами для размещения волоконно-оптических гироскопов и акселерометров, при этом гироскопы снабжены защитными крышками и закреплены таким образом, что их измерительные оси располагаются равномерно вдоль образующих кругового конуса с половиной угла при вершине осевого сечения равным arccos(1/√3), а четыре линейных акселерометра и четыре угловых акселерометра, расположены во внутренней полости корпуса под каждым из волоконно-оптических гироскопов и их оси чувствительности совпадают, а блок электроники содержит четыре канала приема и обработки информации и два блока сопряжения.
Блок сопряжения содержит микроконтроллер сбора и обработки информации с каналов приема и обработки информации и передачи результатов в шину CAN, драйверы шины CAN, источник питания и схему защиты микросхем от тиристорного эффекта.
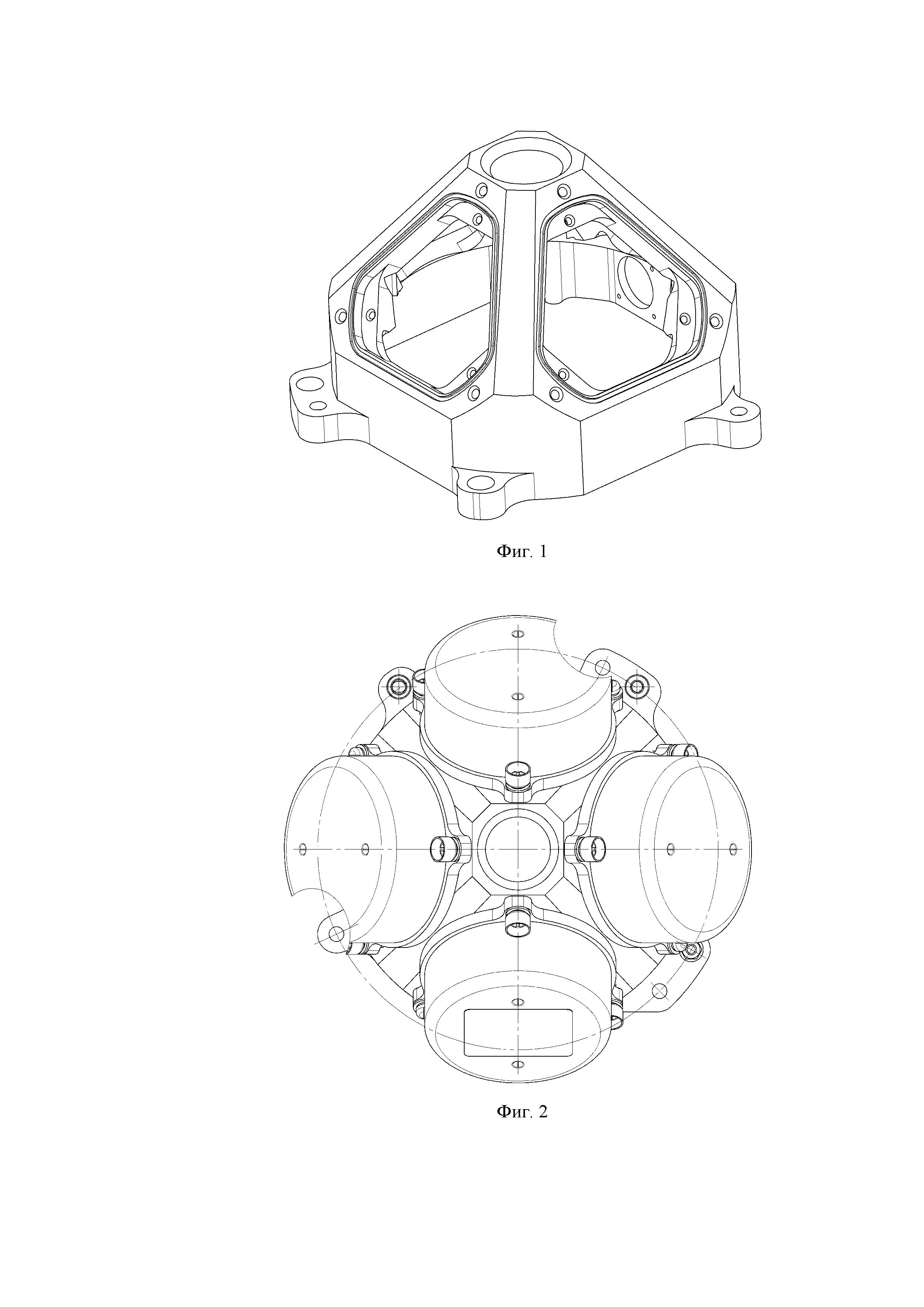
Корпус навигационной системы, выполненный в виде несущего кронштейна, имеющего форму, приближенную к четырехгранной усеченной пирамиде c внутренней полостью, при этом в боковых гранях корпуса выполнены гнёзда для размещения гироскопов, угловых и линейных акселерометров, содержащие отверстия для крепления по одному гироскопу и одному угловому и линейному акселерометру на каждой боковой грани.
Заявляемое изобретение иллюстрируется чертежами, на которых представлены:
Фиг. 1 – корпус навигационной системы,
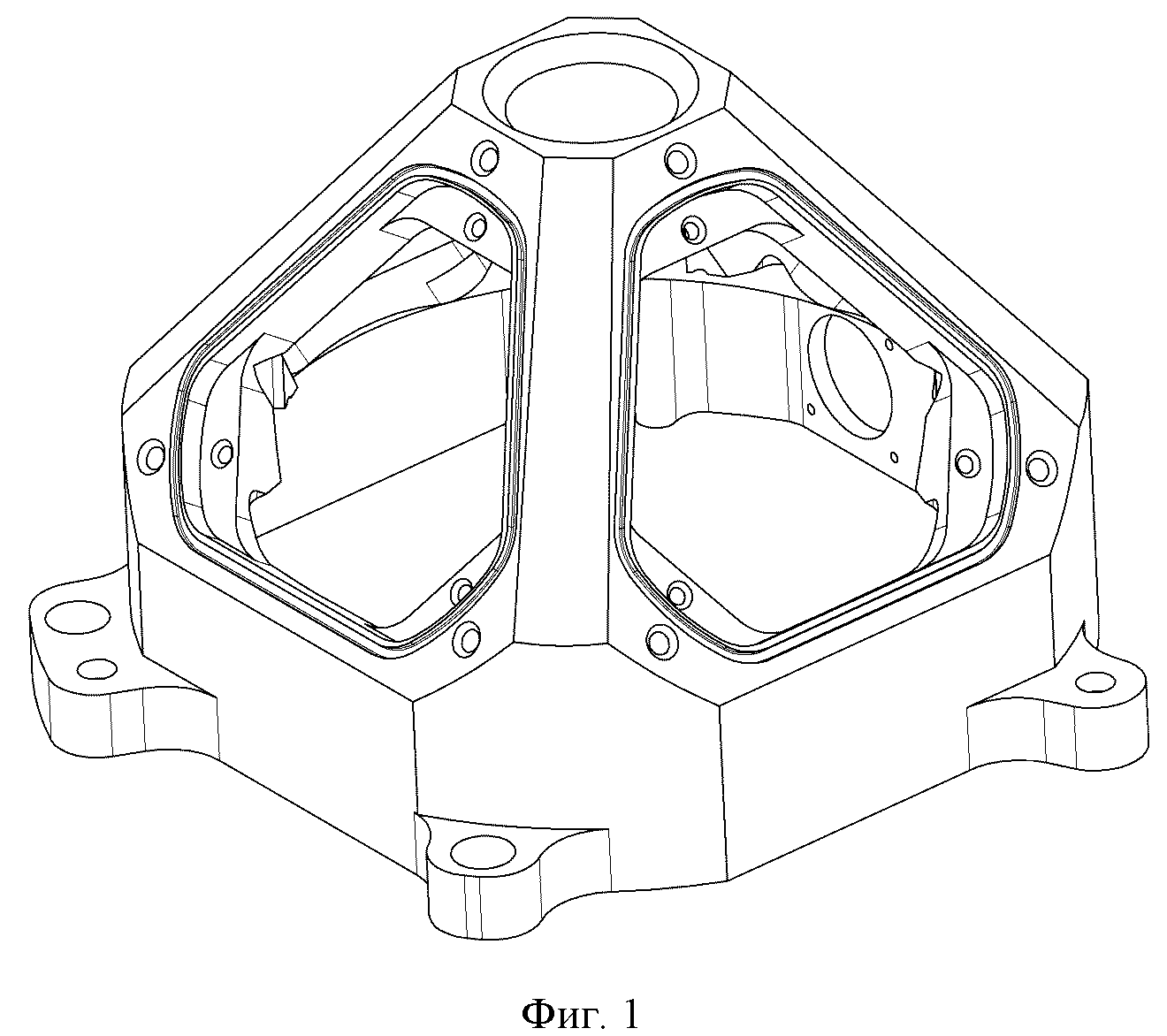
Фиг. 2 – навигационная система вид сверху,
Фиг. 3 - навигационная система вид сбоку,
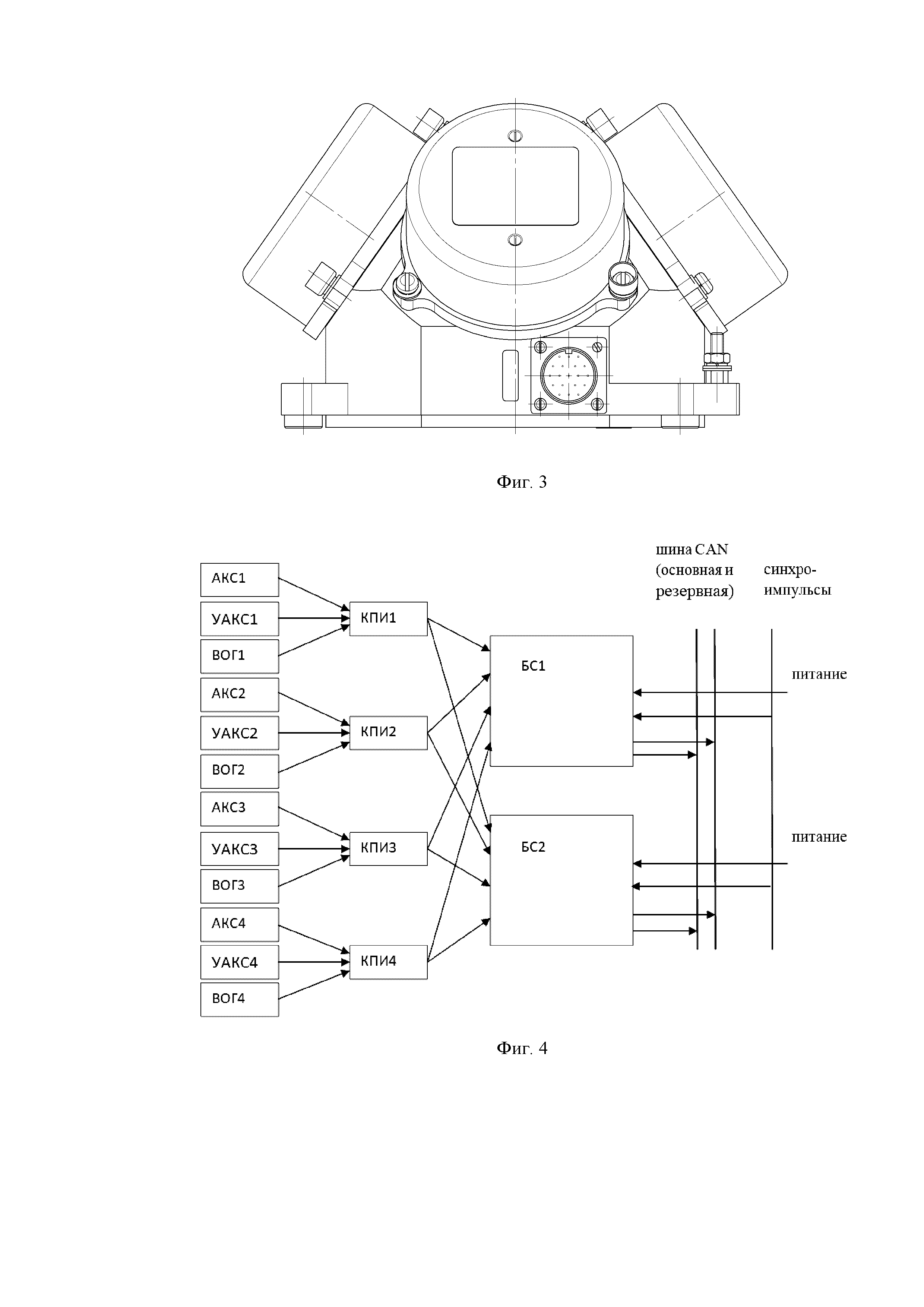
Фиг. 4 – структурная схема навигационной системы.
Заявляемое устройство включает корпус, во внутренней полости которого размещены с обеспечением фиксации чувствительные элементы - четыре волоконно-оптических гироскопа (ВОГ) для измерения угловой скорости, четыре линейных акселерометра для измерения линейного ускорения, четыре угловых акселерометра и блок электроники. Блок электроники включает четыре канала приема информации и предварительной обработки (КПИ) и два блока сопряжения – основной (блок сопряжения 1) и резервный (блок сопряжения 2).
Заявляемое устройство является моноблочной структурой. Корпус имеет конструктивное исполнение, обеспечивающее оптимальное расположение чувствительных элементов и блока электроники. Корпус представляет собой несущий кронштейн (каркас), форма которого приближена к усеченной четырехгранной пирамиде с внутренней полостью. При этом в боковых гранях корпуса выполнены посадочные места – гнёзда для размещения гироскопов, угловых и линейных акселерометров, содержащие отверстия для крепления по одному гироскопу, одному угловому и одному линейному акселерометру на каждой базовой поверхности (боковой грани). Блок электроники размещен во внутренней полости корпуса.
Корпус выполнен из алюминиевого сплава Д16. Толщина корпуса 4 - 5 мм. Благодаря такому исполнению корпус выполняет не только несущую роль, но и роль защитного экрана от воздействия ионизирующих излучений космического пространства.
Гироскопы, угловые и линейные акселерометры закреплены таким образом, что их измерительные оси располагаются равномерно вдоль образующих кругового конуса с половиной угла при вершине осевого сечения равным arccos(1/√3).
Каждый линейный акселерометр, угловой акселерометр и волоконно-оптический гироскоп подключен к своему КПИ. Каждый КПИ подключен к обоим блокам сопряжения. Все КПИ электрически и программно идентичны. Оба блока сопряжения электрически и программно идентичны за исключением того, что в блоке сопряжения 1 установлена перемычка, указывающая программному обеспечению, что он - основной, а в блоке сопряжения 2 эта перемычка подключена к питанию блока сопряжения 1 таким образом, что когда блок сопряжения 1 включен – блок сопряжения 2 функционирует по алгоритму резервного, когда блок сопряжения 1 выключен – блок сопряжения 2 функционирует по алгоритму основного блока сопряжения 1.
Оба блока сопряжения подключены к резервированной шине CAN. Каждый блок сопряжения имеет свой источник питания, подключенный к своей шине питания. Минусовые провода шины питания обоих блоков сопряжения электрически соединены между собой.
В состав КПИ входят следующие функциональные устройства:
• микроконтроллер приема и предварительной обработки информации (ЦП);
• приемник сигнала стандарта RS-232S (Rx);
• схема согласования микроконтроллера с системой управления угловыми акселерометрами.
В состав блока сопряжения входят следующие функциональные устройства:
• микроконтроллер сбора и обработки информации с КПИ, и передачи результатов в шину CAN (ЦП);
• драйверы шины CAN (DRV);
• источника питания и схем защиты микросхем от тиристорного эффекта (ИП).
Блоки сопряжения допускают работу как в режиме нагруженного, так и ненагруженного резервирования.
В случае сбоя или отказа аппаратуры бортовой обеспечивающий комплекс летательного аппарата должен отключить питание отказавшего блока сопряжения и включить питание резервного блока сопряжения, после наступления функциональной готовности задать режим работы.
В случае повреждения программного обеспечения в Flash-памяти микроконтроллера, из-за воздействия тяжелых заряженных частиц космического пространства, аппаратура бортового обеспечивающего комплекса должна подать технологическую команду на копирование содержимого Flash-памяти из исправного микроконтроллера в соответствующий микроконтроллер с поврежденным содержимым Flash-памяти.
Напряжение питания бортовой сети подается на оба блока сопряжения, командные сообщения по шине CAN оба блока сопряжения принимают и отрабатывают одновременно, напряжение питания от обоих блоков сопряжения подается на датчики в соответствии с заданной конфигурацией и результатами диагностики датчиков, результаты измерений в шину CAN выдает основной блок сопряжения 1, а резервный блок сопряжения 2 отслеживает факты своевременной выдачи результатов измерения и их значения.
В случае сбоя или отказа основного блока сопряжения 1 выдачи результатов измерения не происходит, резервный блок сопряжения 2 определяет факт сбоя по отсутствию сообщения с результатами измерений в шине CAN в запланированное время и выдает свои результаты измерений.
Сбившийся микроконтроллер перезапускается встроенным сторожевым таймером или схемой защиты от тиристорного эффекта.
После запуска микроконтроллер ЦП ожидает прихода сообщений в шине CAN от другого блока сопряжения или технологических команд от бортового обеспечивающего комплекса в течение 2 периодов формирования информации. Если принимает технологические команды – выполняет их в соответствии с протоколом информационного обмена, если принимает сообщения от ЦП другого блока сопряжения – синхронизирует по ним свою конфигурацию и значения интегралов. После этого, если блок сопряжения сконфигурирован как основной – ЦП начинает выдачу результатов измерения в шину CAN, если сконфигурирован как резервный – ЦП продолжает отслеживание за сообщениями основного БС и БКОС.
Заявляемое устройство связано с цифровым вычислительным устройством, например бортовым компьютером, посредством CAN.
Заявляемое устройство также укомплектовано программным обеспечением.
Работа заявляемого устройства основана на измерении абсолютных угловых скоростей, и линейных ускорений, действующих по осям чувствительности соответственно волоконно-оптических гироскопов, линейных и угловых акселерометров, связанных с осями приборной системы координат, при этом угловые акселерометры позволяют снизить шум в показаниях волоконно-оптических гироскопах. После сбора информации от всех чувствительных элементов в процессорном модуле происходит обработка данных, запись полученных и обработанных данных в буфер для подготовки ответа по CAN.
Алгоритм преобразования выбран таким образом, что на выходе CAN снимается и передается в бортовую цифровую вычислительную машину информация:
- о проекциях вектора абсолютной угловой скорости на оси чувствительности заявляемого устройства (объекта);
- о приращениях интегралов проекций вектора абсолютной угловой скорости на оси чувствительности заявляемого устройства (объекта);
- о проекциях вектора линейного ускорения на оси чувствительности заявляемого устройства (объекта);
- о приращениях интегралов проекций вектора линейного ускорения на оси чувствительности заявляемого устройства (объекта);
- о моментах времени, на которые сформирована информация.
- о компонентах кватерниона ориентации заявляемого устройства (объекта).
Таким образом, заявленный технический результата достигается благодаря наличию угловых акселерометров, позволяющих снизить шум в показаниях волоконно-оптических гироскопах, и наличию в блоке электроники двух блоков сопряжения – основного и резервного, позволяющих обеспечить повышенную надёжность работы устройства.
Блок измерения угловых скоростей с реверсивной системой терморегулирования
Блок измерения угловых скоростей с реверсивной системой терморегулирования
Навигационная система и корпус навигационной системы
Волоконно-оптический гироскоп с термокомпенсированным цифровым выходом

