Результат интеллектуальной деятельности: ОТКАЗОУСТОЙЧИВАЯ ПРИВОДНАЯ СИСТЕМА МАГНИТНОГО ПОДШИПНИКА
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к электронным защитным противоотказным системам и, более конкретно, к приводной системе магнитного подшипника, содержащей электронную структуру, защищающую от неисправностей.
УРОВЕНЬ ТЕХНИКИ
[0002] Вращающиеся механизмы воплощают бесконтактные активные магнитные подшипники в широкой области применений от безмасляных компрессоров, насосов до энергосберегающих маховиков и вращающихся валов. Сам подшипник парит бесконтактным образом под действием электромагнитного поля, генерируемого электронной цепью привода магнитного подшипника, содержащей множество силовых электронных устройств. Отказ одного или большего количества силовых электронных устройств, такой как обрыв цепи, например, может привести к потере магнитной левитации подшипника. Потеря левитации в подшипнике во время вращения вала (например, ротора) на высокой скорости может привести к тяжелым повреждениям механических компонентов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В соответствии с вариантом реализации изобретения, электронный отказоустойчивый приводной модуль магнитного подшипника содержит первое множество переключающихся элементов и второе множество переключающихся элементов. По меньшей мере одна катушка расположена между первым множеством переключающихся элементов и вторым множеством переключающихся элементов. Первые и вторые переключающиеся элементы выполнены с возможностью выборочного функционирования в первом режиме работы и втором режиме работы для генерирования электромагнитного поля. Электронный отказоустойчивый приводной модуль магнитного подшипника выполнен с возможностью обнаружения одного или большего количества отказов, включая обрыв цепи по меньшей мере одного из первого или второго переключающихся элементов.
[0004] Дополнительно к одной или более характерным особенностям, описанным выше, или в качестве альтернативного варианта дополнительные варианты реализации изобретения включают:
[0005] характерную особенность, отличающуюся тем, что диод присоединяется через каждый переключающийся элемент из первого и второго множества переключающихся элементов для формирования множества двунаправленных цепей фазовых плеч;
[0006] характерную особенность, отличающуюся тем, что первый режим работы выполнен с возможностью генерирования по меньшей мере одного тока катушки в первом направлении через указанную по меньшей мере одну катушку в ответ на получение первого выходного сигнала ШИМ, и генерирования указанного по меньшей мере одного тока катушки во втором направлении, противоположном первому направлении через указанную по меньшей мере одну катушку в ответ на получение второго выходного сигнала ШИМ;
[0007] характерную особенность, отличающуюся тем, что первая катушка расположена между первой двунаправленной цепью фазового плеча и второй двунаправленной цепью фазового плеча, формируя первую цепь Н-моста, а вторая катушка расположена между второй двунаправленной цепью фазового плеча и третьей двунаправленной цепью фазового плеча, формируя вторую цепь Н-моста;
[0008] характерную особенность, отличающуюся тем, что первая цепь Н-моста и вторая цепь Н-моста имеют одно общее фазовое плечо, при этом первая цепь Н-моста выполнена с возможностью управления током первой катушки через первую катушку, а вторая цепь Н-моста выполнена с возможностью управления током второй катушки через вторую катушку, причем ток второй катушки управляется таким образом, чтобы иметь направление, обратное по отношению к току первой катушки; и
[0009] характерную особенность, отличающуюся тем, что каждая двунаправленная цепь фазового плеча содержит первый переключающийся элемент, выполненный с возможностью проведения тока на основании первого режима работы и подавления тока на основании второго режима работы, и второй переключающийся элемент, выполненный с возможностью подавления тока на основании первого режима работы и проведения тока на основании второго режима работы.
[0010] В соответствии с другим вариантом реализации изобретения, электронная отказоустойчивая приводная система магнитного подшипника содержит электронный отказоустойчивый приводной модуль магнитного подшипника, выполненный с возможностью выборочного функционирования в первом режиме работы в ответ на получение первого выходного сигнала ШИМ и втором режиме работы в ответ на получение второго выходного сигнала ШИМ. Электронная отказоустойчивая приводная система магнитного подшипника дополнительно содержит электронный модуль обнаружения отказа, электрически соединенный посредством связи с электронным отказоустойчивым приводным модулем магнитного подшипника. Электронный модуль обнаружения отказа выполнен с возможностью вывода управляющего сигнала об отказе в ответ на обнаружение электрического отказа электронной отказоустойчивой приводной системы магнитного подшипника, причем управляющий сигнал об отказе инициирует переход из первого режима работы во второй режим работы.
[0011] Дополнительно к одной или более характерным особенностям, описанным выше, или в качестве альтернативного варианта, дополнительные варианты реализации изобретения включают:
[0012] характерную особенность, отличающуюся тем, что электронный отказоустойчивый модуль контроллера тока выполнен с возможностью выборочного вывода первого выходного сигнала ШИМ и второго выходного сигнала ШИМ;
[0013] характерную особенность, отличающуюся тем, что в ответ на получение управляющего сигнала об отказе, электронный отказоустойчивый модуль контроллера тока прерывает первый выходной сигнал ШИМ и выводит второй выходной сигнал ШИМ для переключения электронного отказоустойчивого приводного модуля магнитного подшипника из первого режима работы во второй режим работы;
[0014] характерную особенность, отличающуюся тем, что отказоустойчивый приводной модуль магнитного подшипника содержит по меньшей мере одну катушку, выполненную с возможностью генерирования электромагнитного поля в ответ на получение тока катушки, протекающего в первом направлении;
[0015] характерную особенность, отличающуюся тем, что модуль обнаружения отказа обнаруживает отказ в виде обрыва цепи отказоустойчивого приводного модуля магнитного подшипника на основании сравнения указанного по меньшей мере тока одной катушки с пороговым значением;
[0016] характерную особенность, отличающуюся тем, что электронный отказоустойчивый приводной модуль магнитного подшипника содержит множество двунаправленных цепей фазового плеча, присоединенных к указанной по меньшей мере одной катушке для формирования по меньшей мере одной цепи Н-моста;
[0017] характерную особенность, отличающуюся тем, что двунаправленные цепи фазового плеча выполнены с возможностью генерирования тока катушки в первом направлении в ответ на получение первого выходного сигнала ШИМ, имеющего первую фазу, и генерирования тока катушки во втором направлении, противоположном указанному первому направлению в ответ на получение второго выходного сигнала ШИМ, имеющего вторую фазу, противоположную указанной первой фазе;
[0018] характерную особенность, отличающуюся тем, что множество двунаправленных цепей фазового плеча содержит первый переключающийся элемент, выполненный с возможностью генерирования тока на основании первого режима работы и подавления тока на основании второго режима работы, и второй переключающийся элемент, выполненный с возможностью подавления тока на основании первого режима работы и генерирования тока на основании второго режима работы; и
[0019] характерную особенность, отличающуюся тем, что указанный по меньшей мере один электрический отказ включает отказ в виде обрыва цепи, индуцированный в ответ на отказ первого переключающегося элемента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0020] Предмет изобретения, рассматриваемый в настоящем изобретении, в частности, раскрыт и явно заявлен в формуле изобретения в заключительной части описания. Указанные выше и другие характерные особенности и преимущества настоящего изобретения станут очевидными из последующего подробного описания, приведенного в сочетании с прилагаемыми чертежами, на которых:
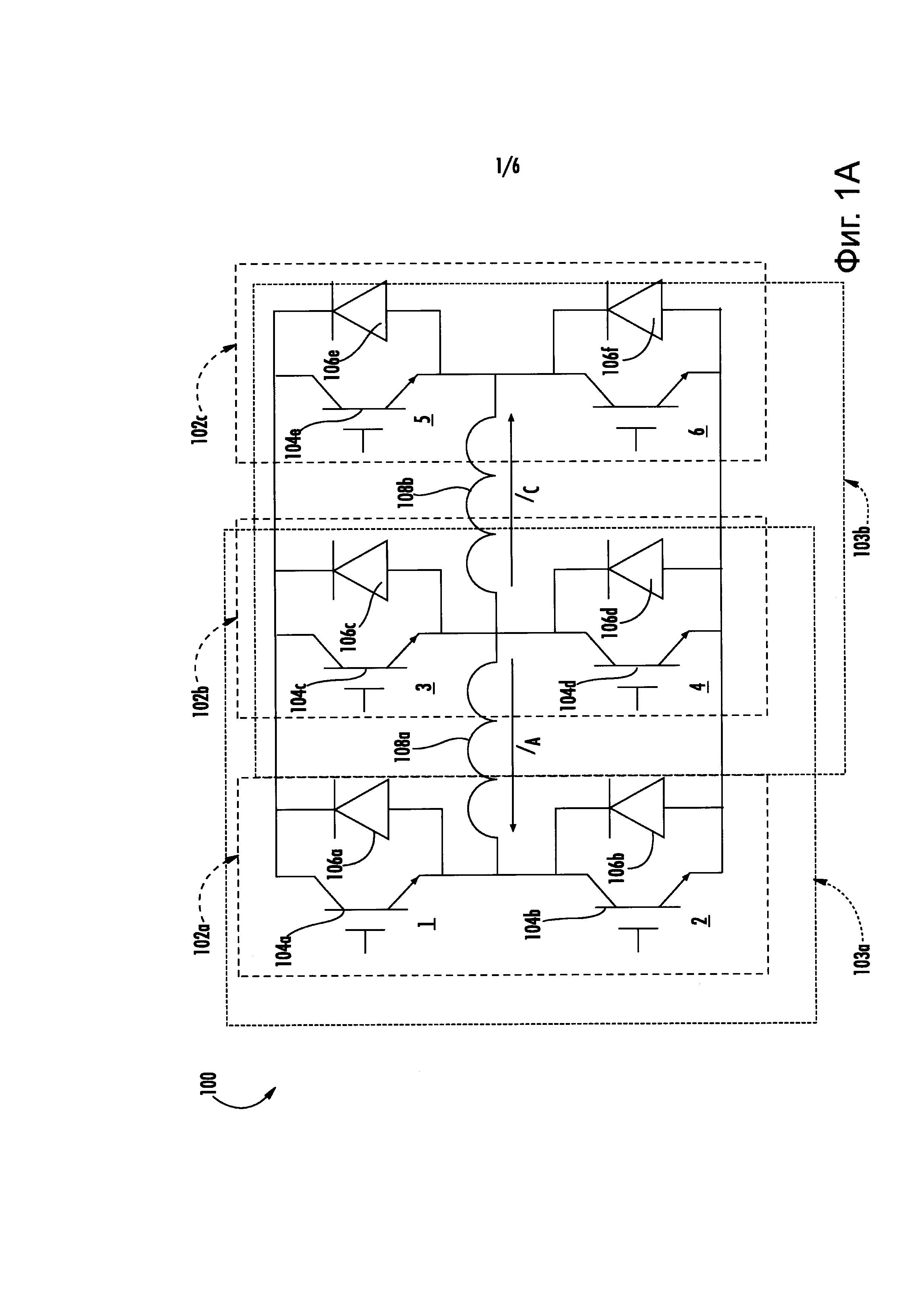
[0021] Фиг. 1А является электрической принципиальной схемой отказоустойчивого приводного модуля магнитного подшипника в соответствии с приведенным в качестве примера вариантом реализации изобретения;
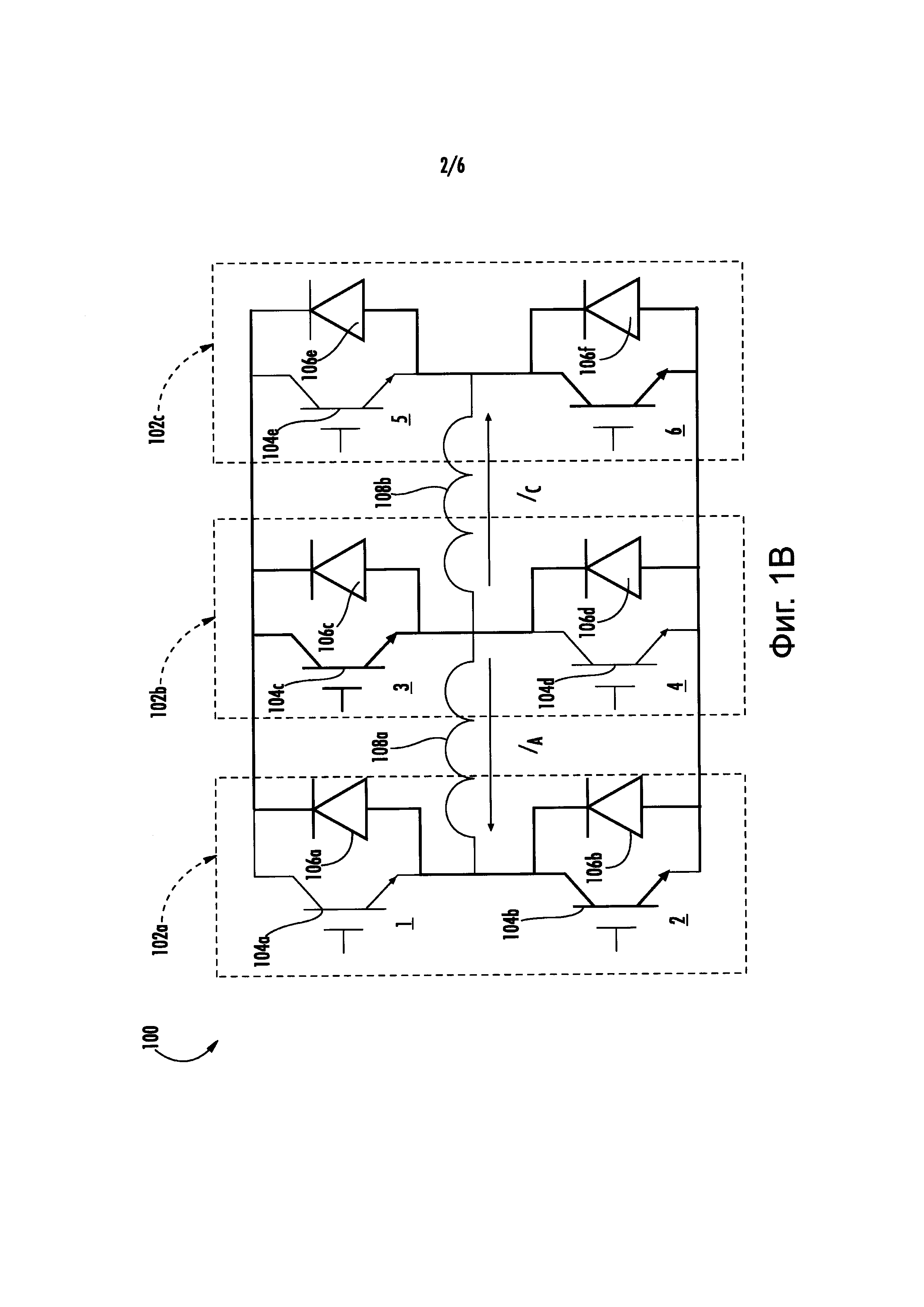
[0022] Фиг. 1В является электрической принципиальной схемой отказоустойчивого приводного модуля магнитного подшипника, функционирующего в первом режиме работы в соответствии с приведенным в качестве примера вариантом реализации изобретения;
[0023] Фиг. 1С является электрической принципиальной схемой отказоустойчивого приводного модуля магнитного подшипника, функционирующего во втором режиме работы в соответствии с приведенным в качестве примера вариантом реализации изобретения;
[0024] Фиг. 2 является блок-схемой системы управления отказоустойчивым приводом магнитного подшипника в соответствии с приведенным в качестве примера вариантом реализации изобретения;
[0025] Фиг. 3 является блок-схемой последовательности, иллюстрирующей процедуру обнаружения отказа, осуществляемую отказоустойчивой приводной системой магнитного подшипника в соответствии с приведенным в качестве примера вариантом реализации изобретения; и
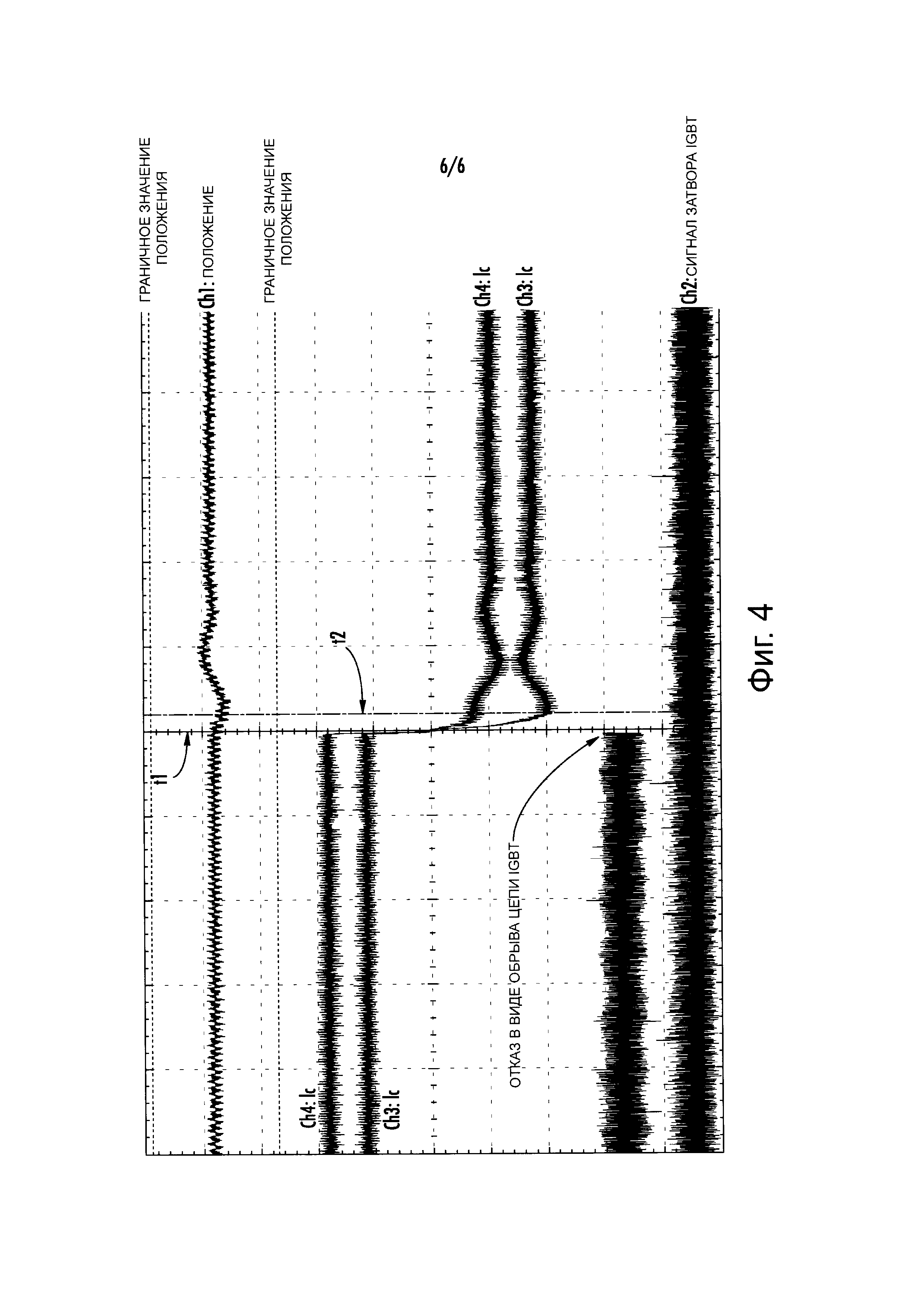
[0026] Фиг. 4 является блок-схемой, иллюстрирующей функционирование отказоустойчивой приводной системы магнитного подшипника в соответствии с приведенным в качестве примера вариантом реализации изобретения.
ПОДРОБНОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0027] Последующее описание изобретения по своему характеру является исключительно иллюстративным и не предназначено ограничить собой настоящее изобретение, его приложение или использование. Следует понимать, что по всем чертежам соответствующие номера ссылок обозначают подобные или соответствующие части и характерные особенности. Используемый здесь термин модуль относится к цепи обработки, которая может содержать специализированную интегральную схему (ASIC), электронную схему, процессор (совместно используемый, выделенный или групповой) и память, которая выполняет одно или более программных или программно-аппаратных приложений, комбинационную логическую схему и/или другие подходящие компоненты, которые обеспечивают описанную функциональность.
[0028] Отказоустойчивая приводная система магнитного подшипника содержит электронный отказоустойчивый приводной модуль магнитного подшипника, выполненный с возможностью выборочного функционирования в первом режиме работы, то есть, нормальном режиме работы, и во втором режиме работы, то есть, вспомогательном режиме работы. Отказоустойчивый приводной модуль магнитного подшипника может содержать трехфазный преобразователь и множество переключающихся элементов, таких как транзисторы, например, для привода трехфазного преобразователя. При работе в нормальном режиме, первое множество переключающихся элементов активируется для генерирования тока катушки в первом направлении, которое, в свою очередь, приводит трехфазный преобразователь и генерирует электромагнитную силу, которая поддерживает подшипник вращающейся системы в состоянии левитации.
[0029] Если выбран вспомогательный режим работы (например, в ответ на обнаружение электрического отказа), первое множество переключающихся элементов деактивируется, а второе множество переключающихся элементов активируется для приведения трехфазного преобразователя. Таким образом, ток катушки генерируется во втором направлении, отличном от указанного первого направления, в то время как трехфазный преобразователь по-прежнему приводится. Поскольку электромагнитные силы определяются абсолютным значением тока катушки (то есть, вне зависимости от направления тока катушки), подобная электромагнитная сила может по-прежнему генерироваться посредством использования указанного вспомогательного режима и может поддерживаться левитация подшипника.
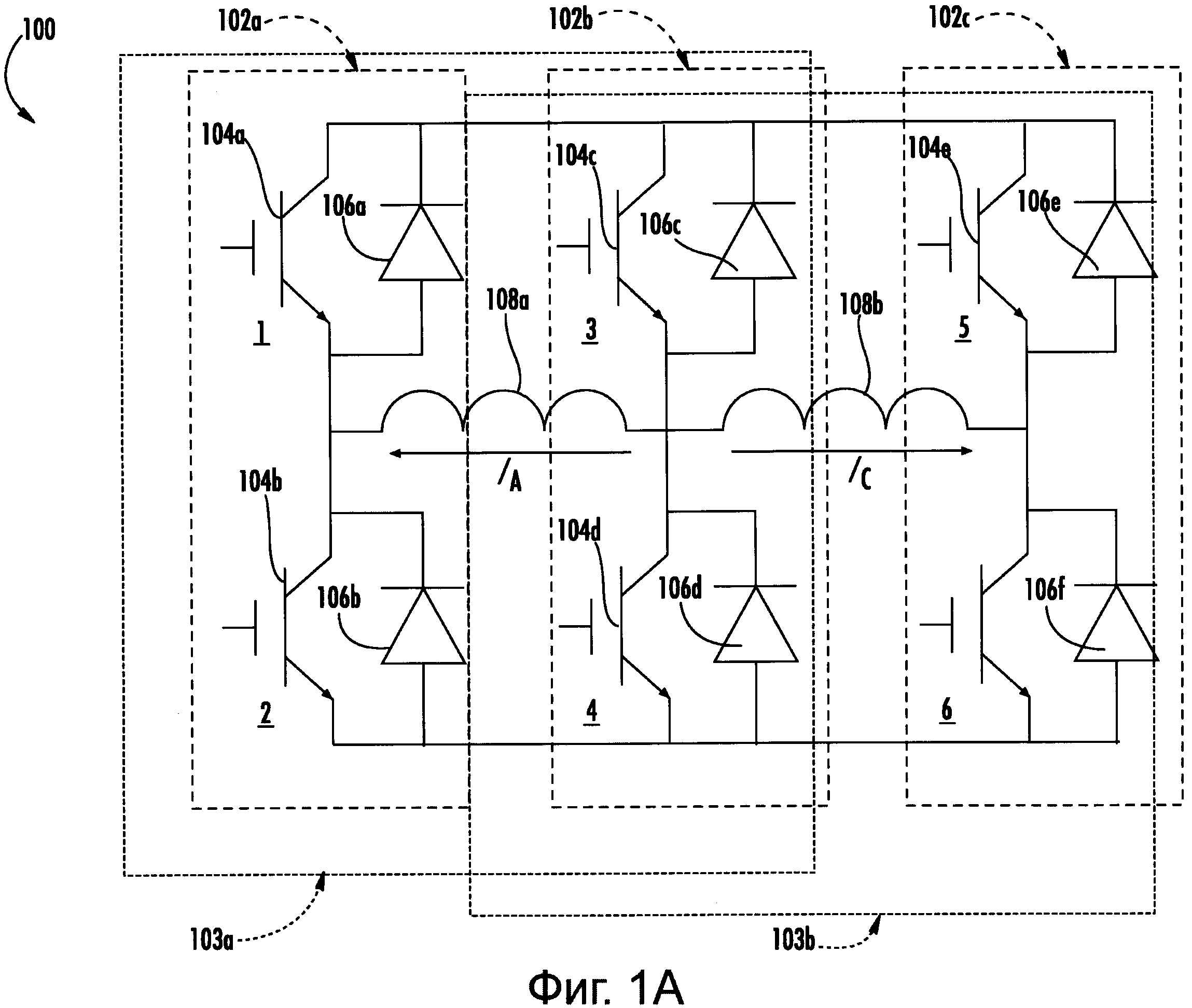
[0030] Обращаясь теперь к Фиг. 1А, проиллюстрирована электрическая принципиальная схема электронного отказоустойчивого приводного модуля магнитного подшипника 100. В соответствии с не ограничивающим вариантом реализации изобретения, электронный отказоустойчивый приводной модуль магнитного подшипника 100 выполнен в виде полномостового трехфазного преобразователя. Электронный отказоустойчивый приводной модуль магнитного подшипника 100 содержит первую двунаправленную цепь фазового плеча 102а, вторую двунаправленную цепь фазового плеча 102b и третью двунаправленную цепь фазового плеча 102с. Ток двух катушек (U, 1с) приводится трехфазными цепями 102а-102с, что может рассматриваться как два Н-моста 103а-103b, обладающие одним общим фазовым плечом. Каждая цепь Н-моста 103а-103b выполнена с возможностью генерирования соответствующего тока катушки (IA, IC), способного протекать в первом и втором противоположном направлениях. Хотя проиллюстрированы три двунаправленные цепи фазовых плеч 102а-102с, принимается во внимание тот факт, что могут использоваться двунаправленные цепи с более чем тремя фазовыми плечами. Например, электронный отказоустойчивый приводной модуль магнитного подшипника 100 может быть выполнен с двумя двунаправленными цепями фазовых плеч или четырьмя двунаправленными цепями фазовых плеч без изменения объема изобретения.
[0031] Первая двунаправленная цепь фазового плеча 102а содержит первый переключающийся элемент 104а и второй переключающийся элемент 104b. Вторая двунаправленная цепь фазового плеча 102b содержит третий переключающийся элемент 104 с и четвертый переключающийся элемент 104d. Третья двунаправленная цепь фазового плеча 102 с содержит пятый переключающийся элемент 104е и шестой переключающийся элемент 104f. В соответствии с неограничивающими вариантами реализации изобретения, указанные переключающиеся элементы являются биполярными транзисторами с изолированным затвором (IGBT). Однако, принимается во внимание тот факт, что могут использоваться другие полупроводниковые переключающиеся элементы, включая, среди прочего, полевые транзисторы с МОП-структурой (MOSFET). Электронный отказоустойчивый приводной модуль магнитного подшипника 100 также содержит диоды 106, соединенные через коллектор и эмиттер каждого переключающегося элемента 104a-104f. Таким образом, каждый из токов катушек IA, IC может генерироваться в направлении, противоположном первому и второму направлениям на основе фазы (то есть, положительной или отрицательной) сигнала, который приводит переключающиеся элементы 104a-104f, как более подробно описано ниже.
[0032] Каждая двунаправленная цепь фазового плеча 102а-102с является выводом со средней точки соответствующей катушки. Например, первая катушка 108а содержит первый конец и второй конец. Первый конец соединен между эмиттером первого переключающегося элемента 104а и коллектором второго переключающегося элемента 104b. Второй конец соединен с эмиттером третьего переключающегося элемента 104с и коллектором четвертого переключающегося элемента 104d. Соответственно, первая цепь Н-моста 103а сформирована посредством использования первой катушки 108а. Подобным образом, вторая катушка 108b содержит первый конец и второй конец. Первый конец соединен с эмиттером третьего переключающегося элемента 104 с и коллектором четвертого переключающегося элемента 104d. Второй конец соединен с эмиттером пятого переключающегося элемента 104е и коллектором шестого переключающегося элемента 104f. Соответственно, цепь второго Н-моста 103b сформирована посредством использования второй катушки 108b. В соответствии с вариантом реализации изобретения, две цепи Н-моста 103а-103b делят общие фазовые плечи, например, фазовое плечо 102-b.
[0033] Обращаясь теперь к Фиг. 1В, проиллюстрирован электронный отказоустойчивый приводной модуль магнитного подшипника 100, функционирующий в первом режиме работы, например, нормальном режиме работы. В соответствии с вариантом реализации изобретения, каждая двунаправленная цепь фазового плеча 102а-102с содержит по меньшей мере один активированный переключающийся элемент и по меньшей мере один деактивированный переключающийся элемент. Затемненные линии указывают на переключающиеся элементы, активированные во время нормального режима работы. В этом случае, например, первый переключающийся элемент 104а, четвертый переключающийся элемент 104d и пятый переключающийся элемент 104е являются деактивированными, в то время как второй переключающийся элемент 104b, третий переключающийся элемент 104с и шестой переключающийся элемент 104f являются активированными. Деактивированные переключающиеся элементы 104а, 104d, 104е подавляют течение тока, в то время как активированные переключающиеся элементы 104b, 104с и 104f проводят ток. Соответственно, активированный второй переключающийся элемент 104b и третий переключающийся элемент 104 с генерируют и управляют током первой катушки IA, протекающим в первом направлении через первую катушку 108а. Активированный третий переключающийся элемент 104с и шестой переключающийся элемент 104f генерируют и управляют током второй катушки IC, протекающим во втором направлении через вторую катушку 108b. Ток второй катушки IC протекает в направлении, противоположном первому направлению тока первой катушки IA . Ток первой катушки IA индуцирует первое электромагнитное поле в ответ на протекание через первую катушку 108а, и ток второй катушки IC генерирует второе электромагнитное поле в ответ на протекание через вторую катушку 108b. Первое и второе электромагнитные поля бесконтактно поддерживают один или большее количество подшипников посредством магнитной левитации.
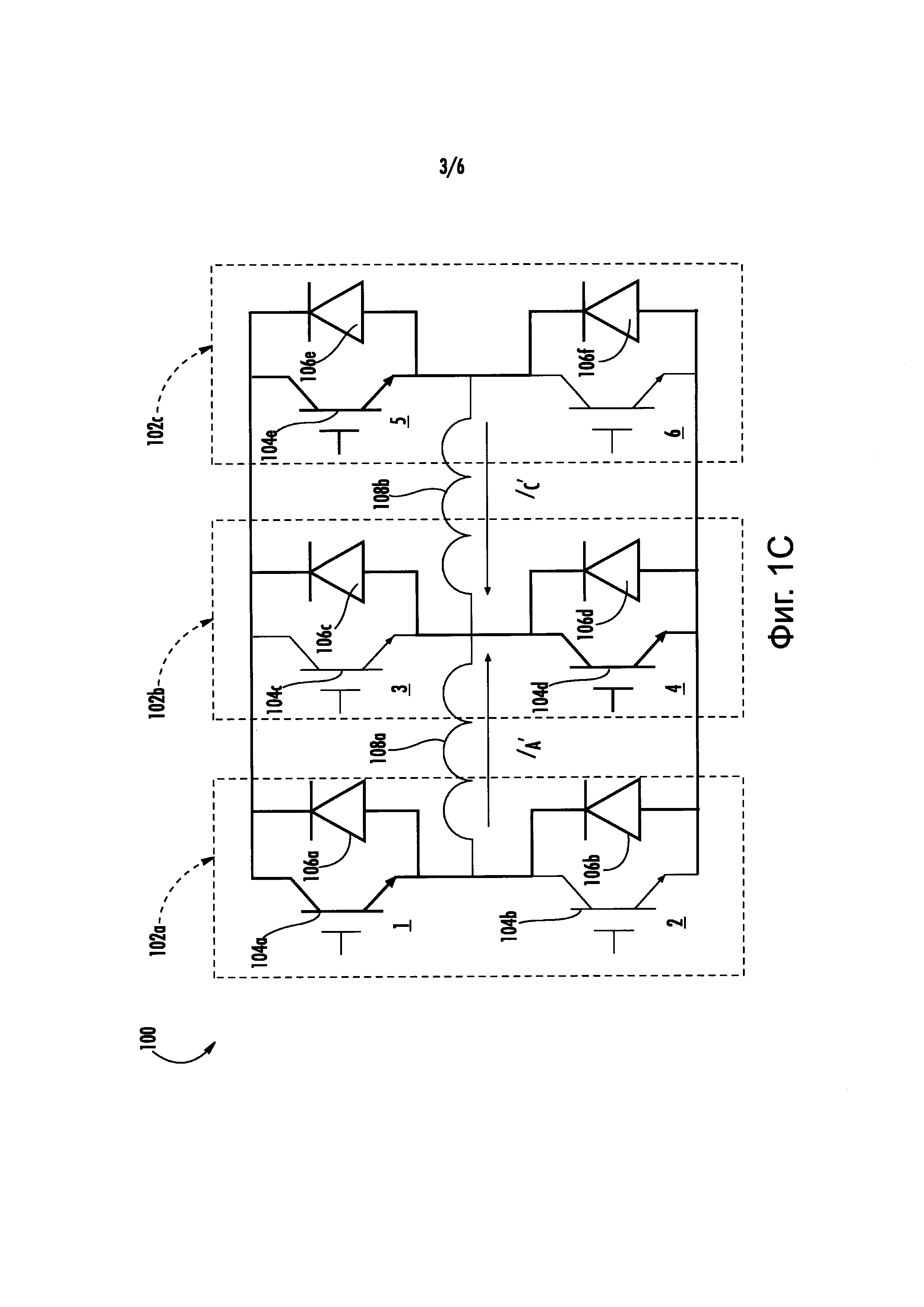
[0034] Обращаясь теперь к Фиг. 1С, проиллюстрирован электронный отказоустойчивый приводной модуль магнитного подшипника 100, функционирующий во втором режиме работы, например, вспомогательном режиме работы. В соответствии с по меньшей мере одним вариантом реализации изобретения, электронный отказоустойчивый приводной модуль магнитного подшипника 100 переключается из нормального режима работы во вспомогательный режим работы в ответ на обнаружение одного или большего количества отказов цепей, включая, но без ограничений, обрыв цепи. Обрыв цепи может произойти, например, в случае, если один или большее количество переключающихся элементов 104b, 104с, 104f, активированных во время нормального режима работы, откажет. В соответствии с вариантом реализации изобретения, каждая двунаправленная цепь фазового плеча 102а-102с содержит по меньшей мере один активированный переключающийся элемент и по меньшей мере один деактивированный переключающийся элемент. Затемненные линии указывают на переключающиеся элементы, активированные во время вспомогательного режима работы, в то время как не затемненные линии указывают на переключающиеся элементы, которые деактивированы.
[0035] Во время функционирования во вспомогательном режиме, например, второй переключающийся элемент 104b, третий переключающийся элемент 104с и шестой переключающийся элемент 104f являются деактивированными, а первый переключающийся элемент 104а, четвертый переключающийся элемент 104d и пятый переключающийся элемент 104е являются активированными. В этом случае, активированные переключающиеся элементы 104а, 104d, 104е проводят ток, в то время как деактивированные переключающиеся элементы 104b, 104с и 104f подавляют протекание тока. Соответственно, активированный первый переключающийся элемент 104а и четвертый переключающийся элемент 104d генерируют и управляют током первой катушки IA', протекающим в первом направлении через первую катушку 108а. Активированный третий переключающийся элемент 104d и пятый переключающийся элемент 104е генерируют и управляют током второй катушки IC', протекающим во втором направлении через вторую катушку 108b. Ток второй катушки IC' протекает в направлении, противоположном первому направлению тока первой катушки IA. Более того, ток первой катушки IA', сгенерированный во время вспомогательного режима работы, протекает в противоположном направлении (то есть, в отрицательной фазе) относительно тока первой катушки IA, сгенерированного во время нормального режима работы. Подобным образом, ток второй катушки IC', сгенерированный во время вспомогательного режима работы, протекает в противоположном направлении (то есть, в отрицательной фазе) относительно тока второй катушки IC, сгенерированного во время нормального режима работы.
[0036] Ток первой катушки IA' индуцирует первое электромагнитное поле в ответ на протекание через первую катушку 108а, и ток второй катушки IC' генерирует второе электромагнитное поле в ответ на протекание через вторую катушку 108b. Электромагнитные поля определяются абсолютным значением тока катушки IA', IC'. Поскольку сила магнитного подшипника не зависит от направления токов катушек IA, IA', IC, и IC', и нормальный режим работы, и вспомогательный режим работы могут генерировать подобные силы левитации. Соответственно, один или большее количество подшипников могут поддерживаться в бесконтактном состоянии левитации без прерывания при переключении из нормального режима работы во вспомогательный режим работы.
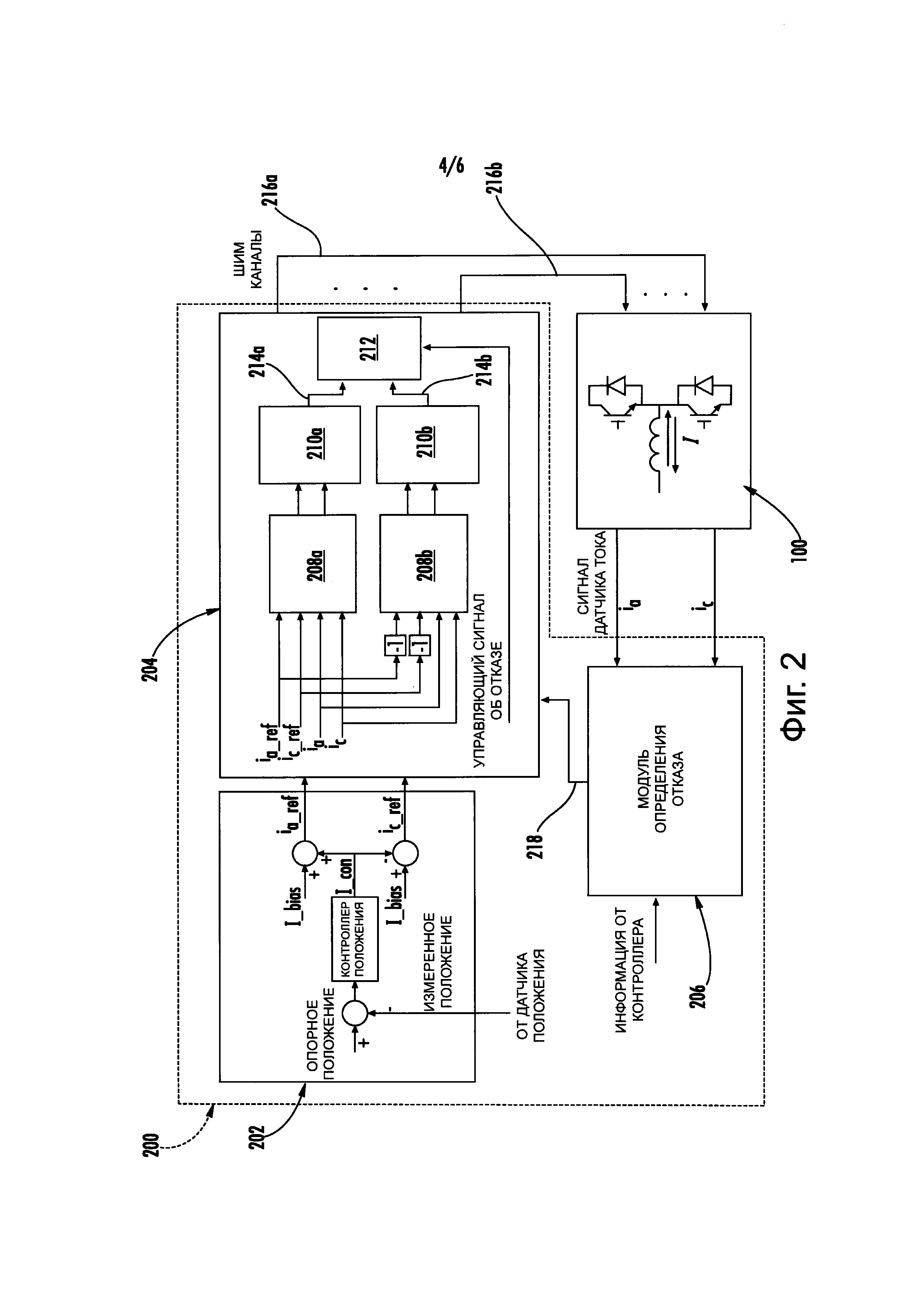
[0037] Обращаясь теперь к Фиг. 2, электронная отказоустойчивая приводная система магнитного подшипника 200 проиллюстрирована в соответствии с неограничивающим вариантом реализации изобретения. Отказоустойчивая приводная система магнитного подшипника 200 воплощает электронный отказоустойчивый приводной модуль магнитного подшипника 100 и выполнена с возможностью обнаружения различных электрических отказов, включая, например, отказ в виде обрыва цепи, вызванный отказом одного или более переключающихся элементов 102a-102f. В ответ на обнаружение отказа, отказоустойчивая приводная система магнитного подшипника 200 выполнена с возможностью управления функционированием отказоустойчивого приводного модуля магнитного подшипника 100. Например, отказоустойчивая приводная система магнитного подшипника 200 выполнена с возможностью переключения отказоустойчивого приводного модуля магнитного подшипника 100 из нормального режима работы во вспомогательный режим работы в ответ на обнаружение отказа в виде обрыва цепи.
[0038] Отказоустойчивая приводная система магнитного подшипника 200 содержит электронный отказоустойчивый приводной модуль магнитного подшипника 100 и электронный модуль управления положением 202, электронный отказоустойчивый модуль контроллера тока 204 и электронный модуль обнаружения отказа 206. Отказоустойчивый приводной модуль магнитного подшипника 100 функционирует в соответствии с подробно изложенными ранее описаниями. Модуль управления положением 202 определяет ошибку положения вала, присоединенного к подшипнику, поддерживаемому посредством левитации. Таким образом, положение подшипника и, следовательно, вала обуславливает ошибку положения. На основании номинального значения магнитной силы, предварительно определяется ток смещения I_bias, и затем генерируется опорный ток первой катушки (ia_ref) и опорный ток второй катушки (ic_ref).
[0039] Отказоустойчивый модуль контроллера тока 204 находится в сигнальной связи с модулем управления положением 202 для получения сигнала опорного тока первой катушки (ia_ref) и сигнала опорного тока второй катушки (ic_ref). Отказоустойчивый модуль контроллера тока 204 также получает сигналы токов катушек от одного или большего количества датчиков тока, выполненных с возможностью определения токов катушек, протекающих через катушки в составе отказоустойчивого приводного модуля 100. Как проиллюстрировано на Фиг. 2, например, отказоустойчивый модуль контроллера тока 204 получает сигнал тока первой катушки (ia), указывающий на ток первой катушки (Iа), и сигнал тока второй катушки (ic), указывающий на ток второй катушки (Ic).
[0040] Отказоустойчивый модуль контроллера тока 204 дополнительно содержит регулирующий узел первого тока 208а, регулирующий узел второго тока 208b, первый драйвер канала широтно-импульсной модуляции (ШИМ) 210а, второй драйвер канала ШИМ 210b и микшер канал ШИМ 212. Первый драйвер тока канала ШИМ 210а генерирует первый выходной сигнал ШИМ 214а, который приводит переключающиеся элементы 104b, 104с, и 104f в активированное состояние во время нормального режима работы. Второй драйвер тока канала ШИМ 210b генерирует второй выходной сигнал ШИМ 214b, который приводит переключающиеся элементы 104а, 104d, и 104е в активированное состояние во время вспомогательного режима работы. Регулирующий узел первого тока 208а получает сигналы первого и второго опорного тока (ia_ref), (ic_ref) в положительной фазе, в то время как регулирующий узел второго тока 208b получает сигналы первого и второго опорного тока (-ia_ref), (-ic_ref) в отрицательной фазе (то есть, инверсные сигналы). На основании сравнения сигналов опорных токов (ia_ref, -ia_ref, ic_ref, -ic_ref) с сигналами тока первой и второй катушки (IA, IC), драйверы первого и второго каналов ШИМ 210а, 210b генерируют соответствующие первый и второй выходные сигналы ШИМ 214а, 214b. Первый канал ШИМ 216а находится в сигнальной связи с выводами затворов переключающихся элементов нормального режима работы 104b, 104 с и 104f, а второй канал ШИМ 216b находится в сигнальной связи с выводами затворов переключающихся элементов вспомогательного режима работы 104а, 104d и 104е. Таким образом, первый выходной сигнал ШИМ 214а управляет переключающимися элементами нормального режима работы 104b, 104с и 104f, а второй выходной сигнал ШИМ 214b управляет переключающимися элементами вспомогательного режима работы 104а, 104d 104е.
[0041] Микшер канала ШИМ 212 обрабатывает первый и второй выходные сигналы ШИМ 214s, 214b наряду с управляющим сигналом об отказе 218, сгенерированным модулем обнаружения отказа 206. Сигнал обнаружения отказа 218 управляет микшером канала ШИМ 212 для выборочного вывода либо первого выходного сигнала ШИМ 214а, либо второго выходного сигнала ШИМ 216b. Таким образом, может быть инициирован нормальный режим работы или вспомогательный режим работы отказоустойчивого приводного модуля магнитного подшипника 100, как описано более подробно далее.
[0042] Для инициирования нормального режима работы отказоустойчивого приводного модуля магнитного подшипника 100 на соответствующие регуляторы тока 208а, 208b подаются сигналы опорного тока в положительной фазе (ia_ref, ic_ref,). Соответствующие скважности также генерируются и отправляются на соответствующие драйверы каналов ШИМ 210а, 210b. Первый выходной сигнал ШИМ 214а для приведения переключаемых элементов 104b, 104с, 104f нормального режима работы генерируется, а второй выходной сигнал ШИМ 214b для приведения переключаемых элементов 104а, 104d, 104е вспомогательного режима работы подавляется (то есть, блокируется) и не достигает второго канала ШИМ 216b. Соответственно, инициируется нормальный режим работы отказоустойчивого приводного модуля магнитного подшипника 100. Когда управляющий сигнал об отказе 218 генерируется, опорные токи в отрицательной фазе (-ia_ref, -ic_ref) выводятся на второй регулятор тока 208b. Соответствующие скважности также генерируются и отправляются на второй драйвер канала ШИМ 210b. Второй выходной сигнал ШИМ 214b для приведения переключающихся элементов 104а, 104d, 104е вспомогательного режима работы выводится на второй канал ШИМ 216, в то время как первый выходной сигнал ШИМ 214а для приведения переключающихся элементов 104b, 104с, 104f нормального режима работы подавляется и не достигает первого канала ШИМ 216а. Соответственно, инициируется вспомогательный режим работы отказоустойчивого приводного модуля магнитного подшипника 100.
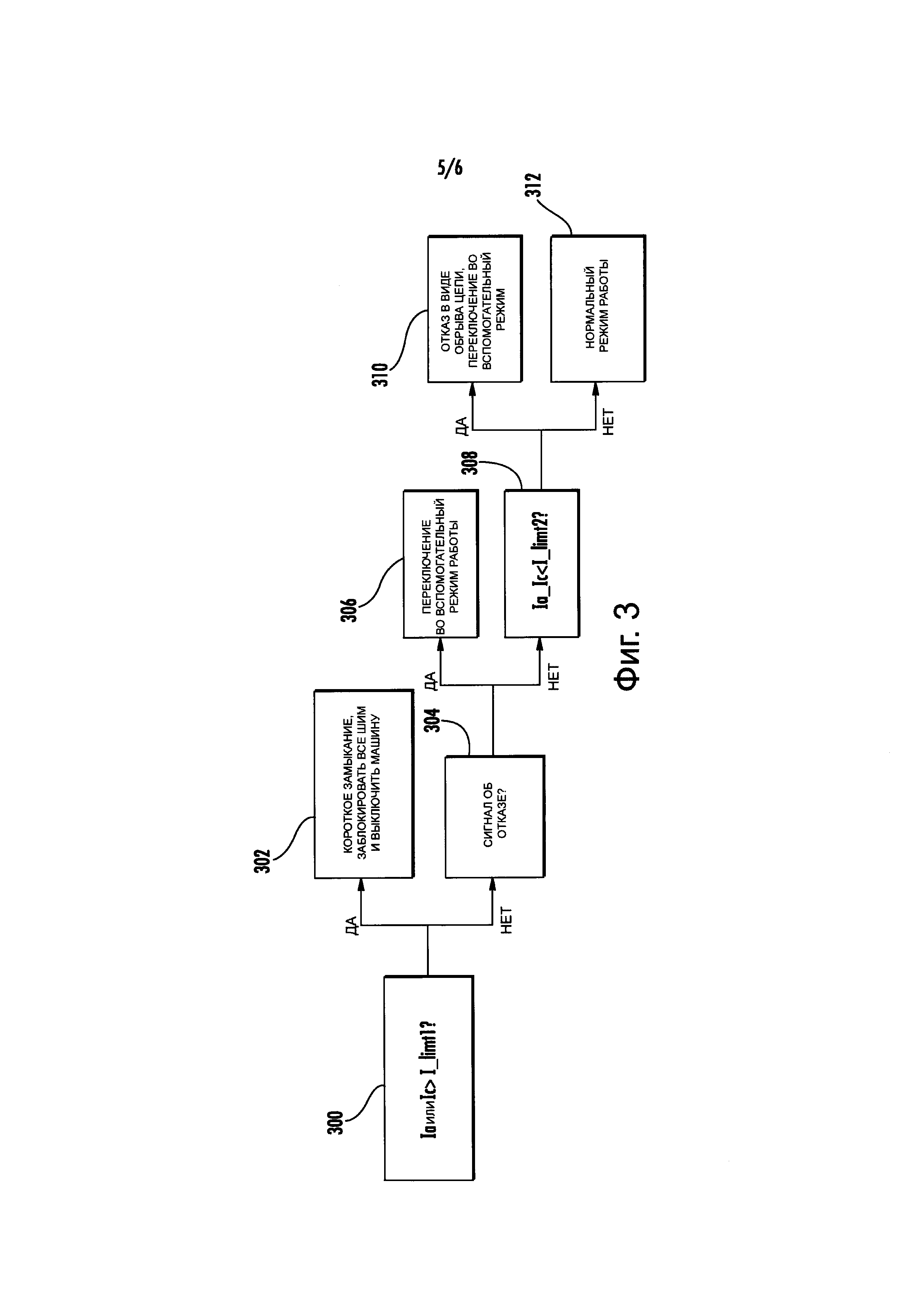
[0043] Модуль обнаружения отказа 206 выполнен с возможностью обнаружения одного или большего количества электрических отказов отказоустойчивого приводного модуля магнитного подшипника 100 при функционировании в нормальном режиме работы. В соответствии с вариантом реализации изобретения, модуль обнаружения отказа 206 выполняет процедуру системного определения отказов, включающую множество операций определения, которые определяют разное в каждом цикле управления. Процедура определения далее будет подробно описана со ссылкой на Фиг. 4. Первая операция определения выполнена с возможностью обнаружения сценария защиты от перегрузки по току. Например, если какой-либо из токов катушек IA, IC достигает тока, превышающего граничное значение (I_limit1) при операции 300, обнаруживается, например, короткое замыкание, и все выходные сигналы ШИМ (то есть, 214а и 214b) блокируются при операции 302 таким образом, что вся система привода двигателя и привода магнитного подшипника 100 деактивируется.
[0044] Если токи катушек IA, IC не достигают граничного значения тока (I limit1) при операции 300, выполняется вторая операция определения для обнаружения внешнего отказа при операции 304. Обнаружение внешнего отказа основано на сигнале отказа, сгенерированном отказоустойчивым приводным модулем магнитного подшипника 100. Если отказоустойчивый приводной модуль магнитного подшипника 100 определяет отказ во время операции 304, такой как отказ устранения насыщения, обнаруженный силовым электронным устройством, активируется отказоустойчивое управление и управляющий сигнал об отказе управляет микшером канала ШИМ 212 для отключения первого выходного сигнала 214а и вывода второго выходного сигнала ШИМ 214b. Например, драйвер защиты от отказов устранения насыщения (DESAT), выполненный с возможностью защиты от перегрузки по току DESAT, может быть подключен к контроллеру таким образом, что контроллер может, следовательно, обнаруживать неисправность, не определяя величину тока, и отключать переключатель до отказа. Таким образом, переключающиеся элементы 104b, 104с, 104f нормального режима работы деактивируются, а переключающиеся элементы 104а, 104d, 104е вспомогательного режима работы активируются таким образом, чтобы отказоустойчивый приводной модуль магнитного подшипника 100 переключился из нормального режима работы во вспомогательный режим работы при операции 306.
[0045] Если отказ не обнаружен во время операции 304, третья операция выполнена с возможностью обнаружения электрического отказа на основании общего тока катушки (то есть, IA+ IC) и порогового значения (I_limit2) при операции 308. При работе в нормальном режиме, общий ток (то есть, сумма) первого и второго токов катушек (IA+IC) будет примерно двойным током смещения (то есть, 2×I_bias). Как упоминалось ранее, ток смещения (I_bias) предварительно определен. Таким образом, пороговое значение (I_limit2) может основываться на положении подшипника. То есть, I_limit2 может устанавливаться, например, равным приблизительно 1,5×I_bias. Если IA+IC меньше, чем I_limit2 при операции 308, обнаруживается отказ в виде обрыва цепи, и отказоустойчивый приводной модуль магнитного подшипника 100 переключается во вспомогательный режим при операции 310. Если все три этапа идентификации не определяют наличия отказа, отказоустойчивый приводной модуль магнитного подшипника 100 продолжает функционировать в нормальном режиме работы при операции 312.
[0046] Что касается Фиг. 4, являющейся блок-схемой, иллюстрирующей функционирование отказоустойчивой приводной системы магнитного подшипника, соответствующей неограничивающему варианту реализации изобретения. В данном примере отказоустойчивый приводной модуль магнитного подшипника 100 изначально работает в нормальном режиме работы. Сигнал Канала 1 (Ch1) указывает на то, что положение вращающегося вала, присоединенного к левитирующему подшипнику, находится в центральном положении. Сигнал Канала 2 (Ch2) указывает на операцию центрального затворного сигнала переключающегося элемента. Сигнал Канала 3 (Ch3) и сигнал Канала 4 (Ch4) отображают токи первой и второй катушек (IA, IC), соответственно, которые изначально находятся в положительной фазе. В момент времени (t1), Ch2 отключен из-за, например, отказа в виде обрыва цепи, и токи первой и второй катушек (U, IC) начинают спадать, как отображено Каналами Ch3 и Ch4.
[0047] В приблизительно t2 модуль обнаружения отказа 206 обнаруживает отказ и генерирует управляющий сигнал об отказе. Управляющий сигнал об отказе управляет микшером каналов ШИМ 212 для подавления первого выходного сигнала ШИМ 214а и вывода второго выходного сигнала ШИМ 214b, таким образом, инициируя вспомогательный режим отказоустойчивого приводного модуля магнитного подшипника 100. Соответственно, токи первой и второй катушек IA', IC' генерируются в отрицательной фазе в пределах приблизительно 1 миллисекунды (мс) с момента времени t1. Принимается во внимание тот факт, что время определения могло бы также быть меньше 1 мс. Таким образом, левитация подшипника может поддерживаться таким образом, чтобы положение оси вращающегося вала поддерживалось по центру между двумя граничными положениями с малым временем, как отображено Ch1. Следовательно, отказоустойчивая приводная система магнитного подшипника 200 может эффективно обнаруживать один или большее количество отказов, таких как обрыв цепи, например, и успешно поддерживать левитацию подшипника и осевое положение соответствующего вращающегося вала. Дополнительно, отказоустойчивая приводная система магнитного подшипника 200 позволяет перезапускать систему с резервным рабочим режимом. Это значительно проще, чем замена оборудования, и стоимость обслуживания уменьшается.
[0048] Хотя настоящее изобретение было подробно описано в связи с лишь ограниченным количеством вариантов реализации, должно быть совершенно понятно, что указанное изобретение не ограничивается подобными раскрытыми вариантами осуществления. Напротив, указанное изобретение может быть модифицировано таким образом, что оно будет включать любое количество вариантов, изменений, замен или эквивалентных механизмов, не описанных ранее, но которые соответствуют сущности и объему указанного изобретения. Кроме того, хотя были описаны различные варианты осуществления указанного изобретения, следует понимать, что аспекты указанного изобретения могут включать только некоторые из описанных вариантов реализации. Соответственно, указанное изобретение не следует рассматривать как ограниченное вышеприведенным описанием, а как ограниченное лишь объемом прилагаемой формулы изобретения.
Система охлаждения
Система и способ автономного и бесперебойного размораживания
Эжекторный холодильный контур
Эжекторный холодильный контур
Удаление мгновенно выделяющегося газа из сборника в системе охлаждения
Эжекторный холодильный контур
Компрессор холодильного контура, холодильный контур и способ управления им
Крепежная втулка для рабочего колеса турбины установки обработки воздуха и установка обработки воздуха, содержащая такой крепежный элемент
Стойкий к образованию инея микроканальный теплообменник
Жидкостная система для комбинированного естественного охлаждения и механического охлаждения

