Результат интеллектуальной деятельности: Устройство позиционного очувствления подвижности пальцев искусственной кисти
Вид РИД
Изобретение
Изобретение относится к медицинской технике, а именно к протезированию и протезостроению.
Известна «Система управления биоэлектрическими протезами» по патенту РФ №243142 А1, МПК A61F 2/72, содержащая искусственную кисть, блок управления перемещениями пальцев искусственной кисти, датчик давления, преобразователь силы сжатия и первый вибратор, датчик угловых перемещений (например, в виде потенциометра), укрепленный на оси шарнира первого пальца, преобразователь положения пальцев и второй вибратор, а также блок ограничения времени подачи информации.
Недостатком данного устройства является то, что информация о положении или начале перемещения пальцев передается точечно в форме вибрационных сигналов двумя вибродатчиками по одному для каждого действия и не может дать инвалиду-оператору представления о взаимном позиционном расположении пальцев кисти относительно друг друга, в том числе, например, при действии за препятствием.
Этот недостаток частично устранен в «Системе управления биоэлектрическим протезом» по патенту №2653820 МПК A61F 2/72
Данная система содержит устройство позиционного очувствления подвижности пальцев искусственной кисти. При этом устройство позиционного очувствления выполнено в виде модуля, содержащего основание с продольными пазами в которые вставлены с возможностью продольного перемещения контактные элементы двух активаторов кинематически посредством ходовых гаек соединенных с шарнирно закрепленным на основании ходовым винтом, один конец которого имеет правую, а второй левую резьбу, причем контактные элементы активаторов выполнены подпружиненными, а ходовой винт соединен с микроэлектроприводом, неподвижно закрепленным на основании, при этом один из активаторов соединен с подвижным звеном закрепленного на основании датчика перемещения активаторов, выполненного в виде потенциометра поступательного типа, а система управления модулем содержит датчик угловых перемещений (например, в виде потенциометра), укрепленный на оси шарнира первого пальца, причем в канале управления микроэлектроприводом активаторов датчик угловых перемещений первого пальца и датчик перемещения активаторов, представляющий собой датчик обратной связи, соединены со входом сумматора, на выходе которого подключены первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключен к электроприводу перемещения активаторов.
Это устройство является наиболее близким по функциональной и технической сущности и выбрано авторами в качестве прототипа.
Недостатком данного устройства является то, что ход активаторов ограничен величиной хода подвижного звена потенциометра поступательного типа, а кроме того устройство с продольным движением активаторов требует также продольного размещения модуля на приемной гильзе или на звене плеча. Данное обстоятельство конструктивно ограничивает ход активаторов, который равен, по крайней мере, размеру раскрытия пальцев кисти плюс размер зоны тактильной нечувствительности при предельном схождении активаторов.
Задачей предлагаемого изобретения является повышение точности управляющих действий за счет увеличения хода активаторов и, соответственно, более эффективного ощущения движения активаторов благодаря поперечной конструкции устройства в виде регулируемой манжеты, а также достижение удобства инвалида-оператора при выполнении целенаправленных действий по самообслуживанию и при надевании протеза благодаря сокращению продольного размера исполнительного механизма устройства.
Технический результат поставленной задачи достигается тем, что в устройстве позиционного очувствления подвижности пальцев искусственной кисти, содержащем основание с продольными пазами в которые вставлены с возможностью продольного перемещения контактные элементы двух активаторов кинематически посредством ходовых гаек соединенных с шарнирно закрепленным на основании ходовым винтом, один конец которого имеет правую, а второй левую резьбу, причем контактные элементы активаторов выполнены подпружиненными, а ходовой винт соединен с приводным узлом, неподвижно закрепленным на основании, при этом устройство содержит также датчик перемещения активаторов, а система управления модулем содержит датчик угловых перемещений, укрепленный на оси шарнира первого пальца, причем в канале управления приводом активаторов датчик угловых перемещений первого пальца и датчик перемещения активаторов, представляющий собой датчик обратной связи, соединены со входом сумматора, на выходе которого подключены первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключен к электроприводу перемещения активаторов, предлагается основание выполнить в виде упругой тонкостенной манжеты, установленной на звене плеча, ходовой винт выполнить гибким, составным из двух частей, причем каждую его часть выполнить в виде навитых виток к витку жестких пружин правого и левого направления с предварительным натяжением витков, среднюю часть ходового винта соединить шарнирно с опорным корпусом, неподвижно закрепленным на манжете, а концы винта закрепить шарнирно в концевых опорах, также неподвижно закрепленных на манжете, при этом ходовые гайки активаторов выполнить с резьбой соответствующей размеру и направлению навивки пружин ходового винта, при этом с внешней стороны устройства на опорном корпусе закрепить упругий ограничительный защитный кожух, имеющий форму манжеты и выполняющий функцию направляющей активаторов, причем края кожуха соединить с концевыми опорами с возможностью компенсации изменяющихся размеров при изменении диаметра манжеты, а на концах манжеты закрепить застежку типа «велкро», кроме того предлагается приводной узел вынести за пределы манжеты и закрепить на гильзе предплечья, причем выполнить его в виде опорной площадки, на которой закрепить дополнительную концевую опору, с которой шарнирно соединить выходной вал мотор-редуктора, неподвижно закрепленного на опорной площадке, при этом выходной вал мотор-редуктора, кинематически посредством зубчатой понижающей передачи соединить с осью датчика перемещения активаторов, выполненного в виде поворотного потенциометра, при этом выходной вал привода соединить гибким валом с ходовым винтом устройства и свободно разместить его в гибкой направляющей, которую с одной стороны неподвижно соединить с концевой опорой манжеты, а с другой - с концевой опорой приводного узла.
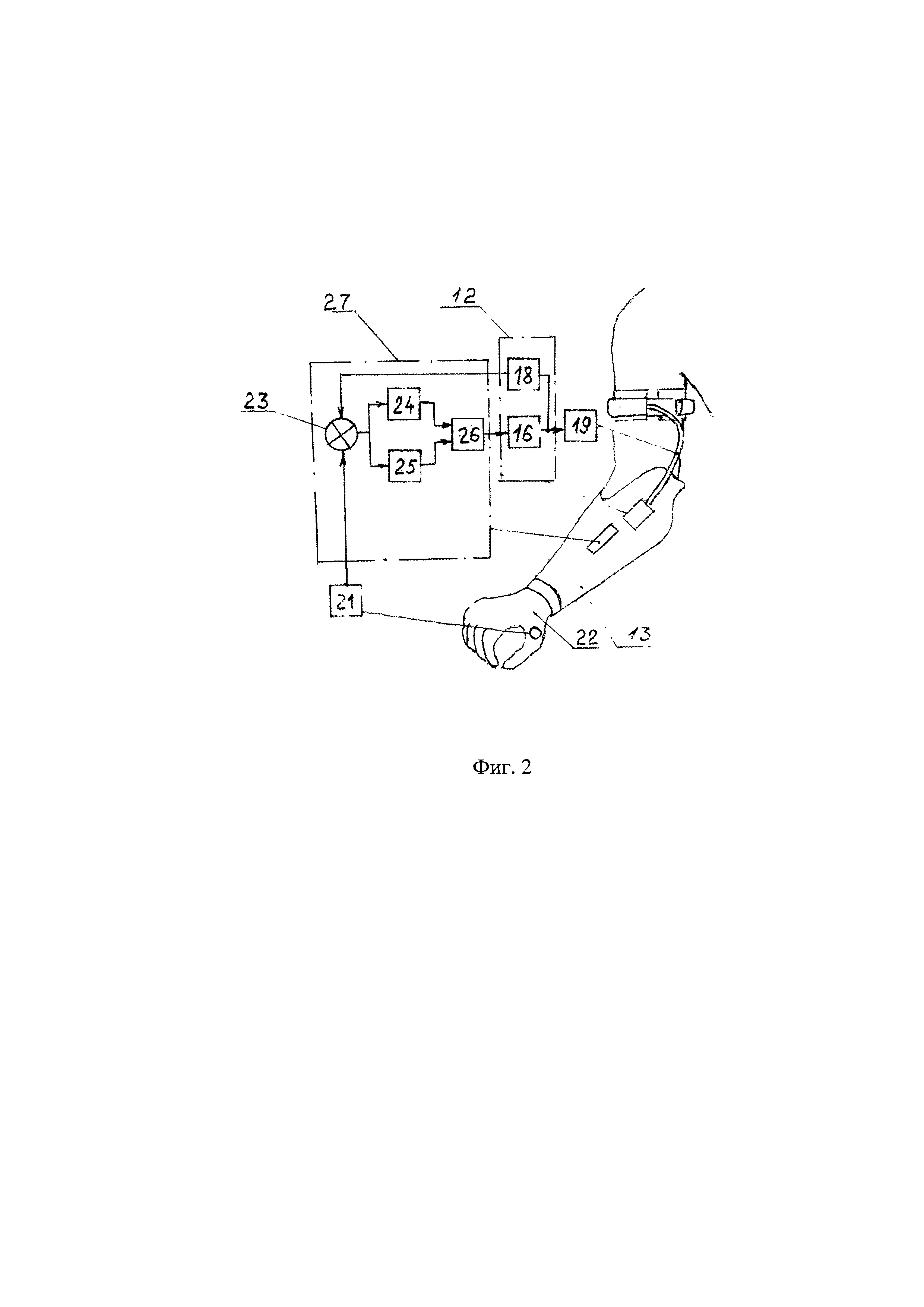
Сущность изобретения поясняется рисунками, где на фиг. 1 представлена кинематическая схема устройства позиционного очувствления, а на фиг. 2 - структурная схема системы управления позиционным очувствлением со схемой размещения приводного узла на гильзе предплечья посредством гибкого вала с гибкой направляющей.
Устройство позиционного очувствления подвижности пальцев искусственной кисти, содержит упругую тонкостенную манжету 1 с продольными пазами, в которые вставлены с возможностью продольного перемещения контактные элементы двух активаторов 2 и 3, кинематически посредством ходовых гаек соединенных с шарнирно закрепленным на манжете ходовым винтом 4, один конец которого имеет правую, а второй левую резьбу, причем контактные элементы 5 и 6 активаторов выполнены подпружиненными, а ходовой винт 4 выполнен гибким, составным из двух частей, причем каждая его часть выполнена в виде навитых виток к витку жестких пружин правого и левого направления с предварительным натяжением витков. Средняя часть ходового винта 4 соединена шарнирно с опорным корпусом 7, неподвижно закрепленным на манжете, а концы ходового винта 4 закреплены шарнирно в концевых опорах 8, 9, также неподвижно закрепленных на манжете, при этом ходовые гайки активаторов выполнены с резьбой соответствующей размеру и направлению навивки пружин ходового винта 4.
С внешней стороны устройства на опорном корпусе 7 закреплен упругий ограничительный защитный кожух 10, имеющий форму манжеты и выполняющий функцию направляющей активаторов, причем края кожуха соединены с концевыми опорами 8 и 9 с возможностью компенсации изменяющихся размеров при изменении диаметра манжеты, а на концах манжеты закреплена застежка 11 типа «велкро».
Приводной узел 12 устройства вынесен за пределы манжеты и закреплен, на гильзе предплечья 13, причем он содержит опорную площадку 14, на которой закреплена концевая опора 15, с которой шарнирно соединен выходной вал мотор-редуктора 16, неподвижно закрепленного на опорной площадке, при этом выходной вал мотор-редуктора, кинематически посредством зубчатой понижающей передачи 17 соединен с осью датчика перемещения активаторов 18, выполненного в виде поворотного потенциометра, при этом выходной вал привода соединен гибким валом 19 с ходовым винтом 4 устройства и свободно размещен в гибкой направляющей 20, которая с одной стороны неподвижно соединиена с концевой опорой манжеты, а с другой - с концевой опорой 15 приводного узла.
В канале управления микроэлектроприводом активаторов датчик угловых перемещений 21 первого пальца искусственной кисти 22 и датчик перемещения активаторов 18, представляющий собой датчик обратной связи, соединены со входом сумматора 23, на выходе которого подключены первый и второй импульсные преобразователи 24 и 25, соединенные с усилителем мощности 26, выход которого подключен к мотор-редуктору 16 перемещения активаторов, соединенного с помощью гибкого вала 19 с ходовым винтом 4 исполнительного механизма устройства. Позиции 23, 24, 25 и 26 составляют электронный блок управления 27.
Устройство позиционного очувствления подвижности пальцев искусственной кисти работает следующим образом.
В исходном состоянии пальцы искусственной кисти 22 сомкнуты. При подаче сигналов управления перемещением пальцев искусственной кисти пальцы приходят в движение на раскрытие, В процессе движения пальцев кисти датчик 21 угла поворота первого пальца регистрирует позиционное положение пальцев кисти. Этот сигнал направляется на сумматор 23 канала управления мотор-редуктором 16 устройства позиционного очувствления, одновременно на сумматор направляется сигнал от датчика 18 перемещения активаторов, являющегося датчиком отрицательной обратной связи в канале управления мотор-редуктором 16 устройства позиционного очувствления. Далее от сумматора 23 разность сигналов поступает на импульсные преобразователи 24 и 25, а затем на усилитель мощности 26, подключенный к мотор-редуктору 16, который вращает в ту или другую сторону ходовой винт 4, с одной стороны которого имеется правая, а с другой левая навивка пружин. Вращение винта приводит в поступательное движение активаторы 2 и 3, которые кинематически соединены с ним посредством ходовых гаек.
Приводной узел 12 вынесенный за пределы манжеты и закрепленный, на гильзе 13 предплечья вращает гибкий вал 19 соединенный с ходовым винтом устройства, при этом гибкий вал свободно размещен в гибкой направляющей 20, которая с одной стороны соединена с концевой опорой 8 манжеты, а с другой - с концевой опорой 15 приводного узла.
Перемещение активаторов происходит синхронно с движением пальцев искусственной кисти. Инвалид-оператор ощущает встречное или разнонаправленное движение контактных элементов 5 и 6, благодаря чему в системе управления реализуется позиционная обратная связь.
Устройство позиционного очувствления позволяет инвалиду-оператору в естественном режиме получить информацию о положении пальцев кисти, о начале движения, окончании движения и процессе самого движения, в том числе, например, при действии за препятствием. Устройство может быть рекомендовано для пользования слабовидящими инвалидами с ампутационными дефектами верхней конечности.
Положительный эффект заявляемого изобретения заключается в следующем: повышается точность координации позиционного положения пальцев, благодаря чему сокращается время выполнения рабочих операций при выполнении целенаправленных действий, упрощается устройство исполнительного механизма позиционного очувствления подвижности пальцев искусственной кисти, обеспечивается удобство пользования протезом при самообслуживании, При этом устройство позиционного очувствления может быть использовано как в электромеханических протезах рук, так и механических.
При необходимости приводной узел может быть установлен непосредственно на манжете.
Кроме того установка приводного узла непосредственно на манжете или вынос его, например, на гильзу предплечья или наплечник (в протезе плеча) делает устройство универсальным, поскольку может быть использовано при различных уровнях ампутации и вариантах конструктивного исполнения протеза.
Устройство позиционного очувствления подвижности пальцев искусственной кисти, содержащее основание с продольными пазами, в которые вставлены с возможностью продольного перемещения контактные элементы двух активаторов, кинематически посредством ходовых гаек соединенных с шарнирно закрепленным на основании ходовым винтом, один конец которого имеет правую, а второй левую резьбу, причем контактные элементы активаторов выполнены подпружиненными, а ходовой винт соединен с микроэлектроприводом, неподвижно закрепленным на основании, при этом устройство содержит также датчик перемещения активаторов, причем в канале управления микроэлектроприводом активаторов датчик угловых перемещений первого пальца искусственной кисти и датчик перемещения активаторов, представляющий собой датчик обратной связи, соединены с входом сумматора, на выходе которого подключены первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключен к электроприводу перемещения активаторов, отличающееся тем, что основание выполнено в виде упругой тонкостенной манжеты, установленной на звене плеча, ходовой винт выполнен гибким, составным из двух частей, причем каждая его часть выполнена в виде навитых виток к витку жестких пружин правого и левого направления с предварительным натяжением витков, средняя часть ходового винта соединена шарнирно с опорным корпусом, неподвижно закрепленным на манжете, а концы винта закреплены шарнирно в концевых опорах, также неподвижно закрепленных на манжете, при этом ходовые гайки активаторов выполнены с резьбой, соответствующей размеру и направлению навивки пружин ходового винта, при этом с внешней стороны устройства на опорном корпусе закреплен упругий ограничительный защитный кожух, имеющий форму манжеты и выполняющий функцию направляющей активаторов, причем края кожуха соединены с концевыми опорами с возможностью компенсации изменяющихся размеров при изменении диаметра манжеты, а на концах манжеты закреплена застежка типа «велкро», кроме того приводной узел вынесен за пределы манжеты и закреплен на гильзе предплечья, причем он выполнен в виде опорной площадки, на которой закреплена дополнительная концевая опора, с которой шарнирно соединен выходной вал мотор-редуктора, неподвижно закрепленного на опорной площадке, при этом выходной вал мотор-редуктора, кинематически посредством зубчатой понижающей передачи соединен с осью датчика перемещения активаторов, выполненного в виде поворотного потенциометра, причем выходной вал привода соединен гибким валом с ходовым винтом устройства и свободно размещен в гибкой направляющей, которая с одной стороны неподвижно соединена с концевой опорой манжеты, а с другой - с концевой опорой приводного узла.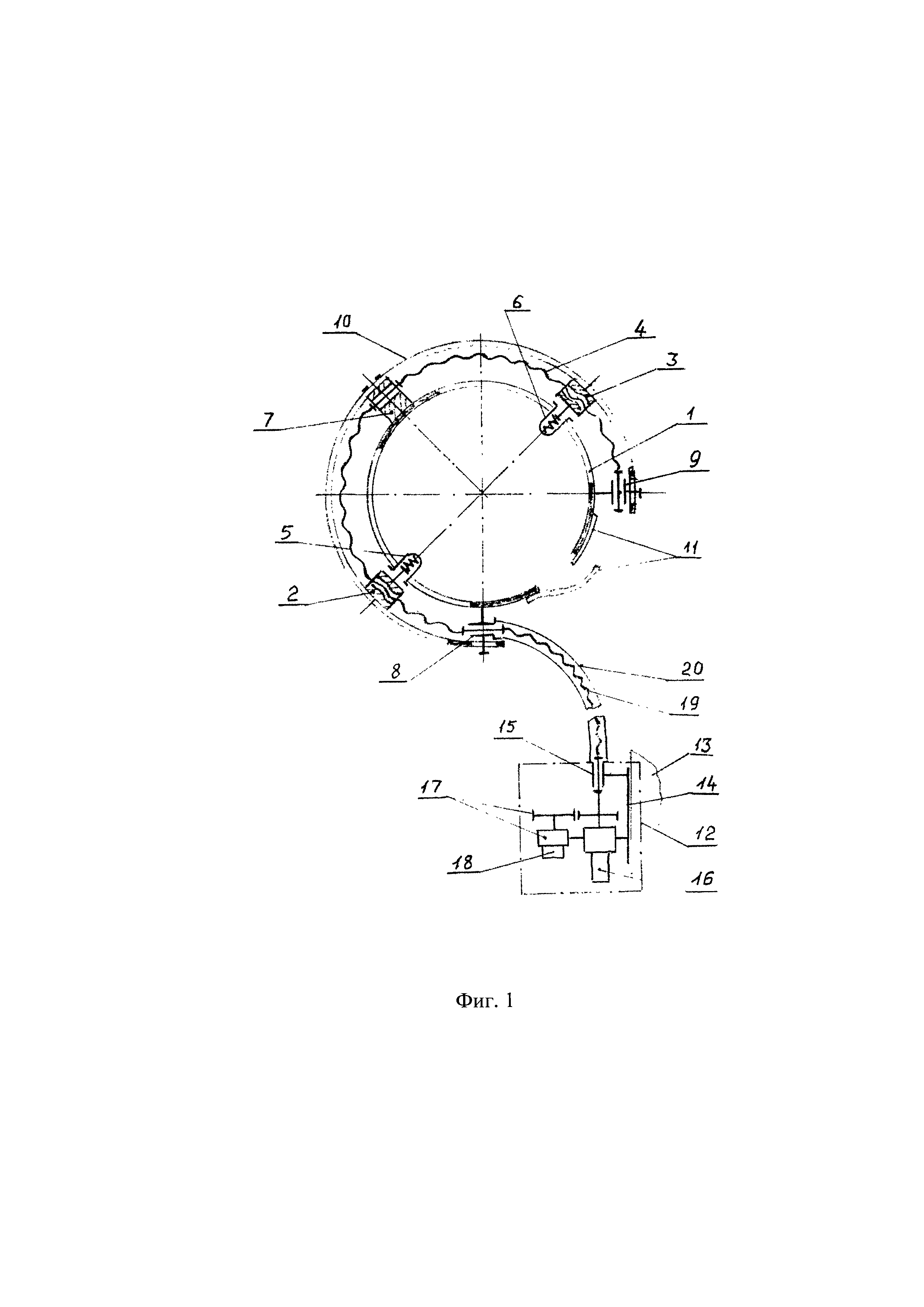
Протез голени
Устройство позиционного очувствления подвижности пальцев искусственной кисти
Стенд для настройки и испытаний многофункционального активного протеза плеча
Протез предплечья
Протез предплечья
Способ выработки топлива из бака летательного аппарата
Фильтр
Система управления биоэлектрическим протезом
Протез голени
Топливный бак и его заборное устройство
Устройство забора топлива из бака летательного аппарата
Протез голени
Устройство позиционного очувствления подвижности пальцев искусственной кисти

