Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ УТОЧНЕННОГО ПОЗИЦИОНИРОВАНИЯ ЧЕРЕЗ ПЕРЕСЕЧЕНИЕ ГИПЕРЗОН
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к области способов и систем позиционирования, которые выполнены с возможностью использования подхода на основе зон с сеткой анкерных узлов, таких как, не ограничиваясь, система определения местоположения внутри помещения для системы освещения, в которой каждое осветительное устройство оборудовано радиоприемопередатчиком. Эти радиоприемопередатчики служат в качестве точек отсчета, называемых анкерными узлами, для позиционирования мобильного узла, такого как устройство, носимое пользователем.
Уровень техники
В ситуации в свободном пространстве модель распространения радиоволн может быть использована для вычисления расстояния между двумя радиоустройствами на основании уровня принимаемого сигнала при условии, что известна мощность передачи передающего устройства. При наличии нескольких радиоанкеров (т.е. радиоустройств с известными местоположениями) уровни принимаемых сигналов могут быть использованы для оценки местоположения радиоустройства посредством трилатерации.
Системы определения местоположения внутри помещений становятся все более и более популярными, с множеством применений, таких как пользовательская навигация, целевая реклама, геозонирование и т.п. Однако, точность подходов с трилатерацией ограничена вследствие больших неопределенностей в модели распространения радиоволн в окружении, которое не может рассматриваться как свободное поле, т.е. каком-либо окружении, содержащем структуры, которые взаимодействуют с радиоволнами и которые могут вызывать ухудшение радиосигналов. Типичная ситуация с несвободным полем представляет собой внутреннее пространство здания, в котором стены, полы, мебель и различные физические структуры взаимодействуют с радиосигналами сложным образом, что существенно отличается от ситуации со свободным полем.
Однако возможно определение местоположения одного радиоблока относительно множества радиоанкеров, работающих в радиочастотной (RF) области в окружении с несвободным полем, с помощью уровней сигналов, принимаемых между радиоблоками и радиоанкерами.
Обычная система определения местоположения внутри помещения может содержать по меньшей мере три компонента. Во-первых, существуют одно или более целевых мобильных устройств, местоположение которых необходимо определять, называемых мобильными узлами. Второй компонент - это группа точек отсчета известных местоположений, называемых анкерными узлами. Третий компонент - это вычислительный объект, называемый механизмом определения местоположения, для вычисления относительных местоположений мобильных узлов относительно анкерных узлов.
На практике, эффективность подхода на основе зон, как описано, например, в WO2014/083494A2, зависит от числа анкерных узлов на каждую зону. Чем больше анкеров в каждой зоне, тем более лучший результат зонирования может быть достигнут. Однако, с учетом плотности анкерных узлов, таких как осветительные устройства сети освещения в окружении внутри помещения, размер каждой зоны, в свою очередь, получается более крупным. Как следствие, разрешение результата определения местоположения компрометируется вследствие укрупненного размера каждой зоны. Этот побочный эффект очень нежелателен, поскольку целью любой типичной системы определения местоположения внутри помещения является достижение результатов определения местоположения с высоким разрешением.
Чтобы получать надежную эксплуатационную характеристику определения местоположения внутри помещения для подхода на основе зон с более высоким разрешением точности, желательно увеличивать пространственную плотность анкерных узлов, что приводит в результате к дополнительным расходам и сложности системы.
Раскрытие изобретения
Задача настоящего изобретения состоит в создании улучшенной системы и способа определения местоположения, посредством которых уточненная характеристика определения местоположения внутри помещений может быть достигнута без каких-либо дополнительных затрат и сложности системы.
Эта задача решается устройством по пункту 1, радиоустройством по пункту 7, системой определения местоположения по пункту 9, сетью освещения по пункту 11, способом по пункту 12 и компьютерным программным продуктом по пункту 13.
Соответственно, анкерные узлы делятся на множество гиперзон по меньшей мере двумя различными способами для получения по меньшей мере двух различных типов гиперзон, при этом для каждого типа гиперзоны одну гиперзону выбирают на основании среднего качества принимаемого сигнала для линий связи между целевым узлом и анкерными узлами в гиперзоне, и при этом пересечение выбранных гиперзон различных типов принимают в качестве конечного результата зонирования для мобильного узла. Таким образом, уточненные результаты определения местоположения пользователя могут быть получены без увеличения плотности анкерных узлов. Каждая гиперзона все еще состоит из множества анкерных узлов, так что операция усреднения качества принимаемого сигнала в пространстве все еще выполняется, что приводит в результате к достоверным результатам зонирования. Использую пересечение идентифицированных гиперзон, например, в ортогональных направлениях, получаются меньшие зоны, которые ведут к более хорошему разрешению результата определения местоположения, без компрометирования достоверности характеристик зонирования. Если анкерные узлы были вместо этого разделены неперекрывающимся образом, так что каждая зона соответствует меньшему числу анкерных узлов, то же разрешение зоны может все еще быть получено, но за счет потери пользы пространственного усреднения для более высокой достоверности результата зонирования.
Согласно первому варианту, блок выбора может быть выполнен с возможностью вычисления единый уровень или качество сигнала гиперзоны для каждой из идентифицированных гиперзон посредством усреднения информации об уровне или качестве принимаемого соответствующего сигнала линий радиосвязи анкерных узлов, принадлежащих гиперзоне. Таким образом, нагрузка обработки предложенного улучшенного подхода определения местоположения на основе зон может сохраняться низкой посредством простой обработки усреднения значений уровня или качества сигнала, полученных для соответствующих линий связи анкерных узлов, принадлежащих каждой гиперзоне.
Согласно второму варианту, который может быть объединен с первым вариантом, гиперзоны пересекающихся типов могут быть выполнены с возможностью прохождения в ортогональных направлениях. Такое ортогональное размещение пересекающихся гиперзон ведет к преимуществу непосредственного определения областей пересечения на основе простой структуры строка-столбец.
Согласно третьему варианту, который может быть объединен с вышеупомянутым первым или вторым вариантом, информация об уровне или качестве сигнала для линий связи может содержать значение RSSI. Значение RSSI с легкостью доступно в системе беспроводной связи, так что предложенный подход определения местоположения на основе зон может быть легко реализован.
Согласно четвертому варианту, который может быть объединен с любым из вышеупомянутых первого-третьего вариантов, гиперзоны пересекающихся типов могут быть выполнены с возможностью частичного перекрытия друг друга. Такие перекрывающиеся области могут быть использованы в случаях, когда радиоблок располагается рядом с границей гиперзон, и система определения местоположения не приводит к определенным результатам относительно гиперзоны, в которой радиоблок находится. Тогда система определения местоположения может определять местоположение радиосистемы в области перекрытия как меньшей области гиперзоны таким образом, чтобы эффективно повысить пространственное разрешение.
Согласно пятому варианту, который может быть объединен с любым из вышеупомянутых первого-четвертого вариантов, блоки идентификации, выбора и пересечения могут содержаться в блоке определения местоположения, который выполнен в виде программируемого блока обработки для выполнения операций и вычислений для получения оцененного местоположения радиоблока. Этот вариант обеспечивает преимущество очень гибкого блока определения местоположения, который может быть перепрограммирован в случае изменяющихся условий или окружений. В качестве примера, число, размер и географическое положение гиперзон может быть приспособлено к изменениям системы или изменениям окружающей среды.
Следует отметить, что вышеописанное устройство может быть реализовано на основе дискретных аппаратных схем с дискретными аппаратными компонентами, интегральных микросхем или конфигураций микросхемных модулей или на основе устройств обработки сигнала или микросхем, управляемых посредством алгоритмов системы программного обеспечения или программ, сохраненных в запоминающих устройствах, записанных на машиночитаемые носители или загруженных из сети, такой как Интернет.
Следует отметить, что устройство по пункту 1, радиоустройство по пункту 7, система определения местоположения по пункту 9, сеть освещения по пункту 11, способ по пункту 12 и компьютерный программный продукт по пункту 13 могут быть аналогичны и/или идентичны предпочтительным вариантам осуществления, в частности, как определено в зависимых пунктах формулы.
Должно быть понятно, что предпочтительный вариант осуществления изобретения также может быть любой комбинацией зависимых пунктов формулы или вышеприведенных вариантов осуществления с соответствующим независимым пунктом формулы.
Эти и другие аспекты изобретения будут очевидны и разъяснены со ссылкой на описанные далее варианты осуществления.
Краткое описание чертежей
На нижеследующих чертежах:
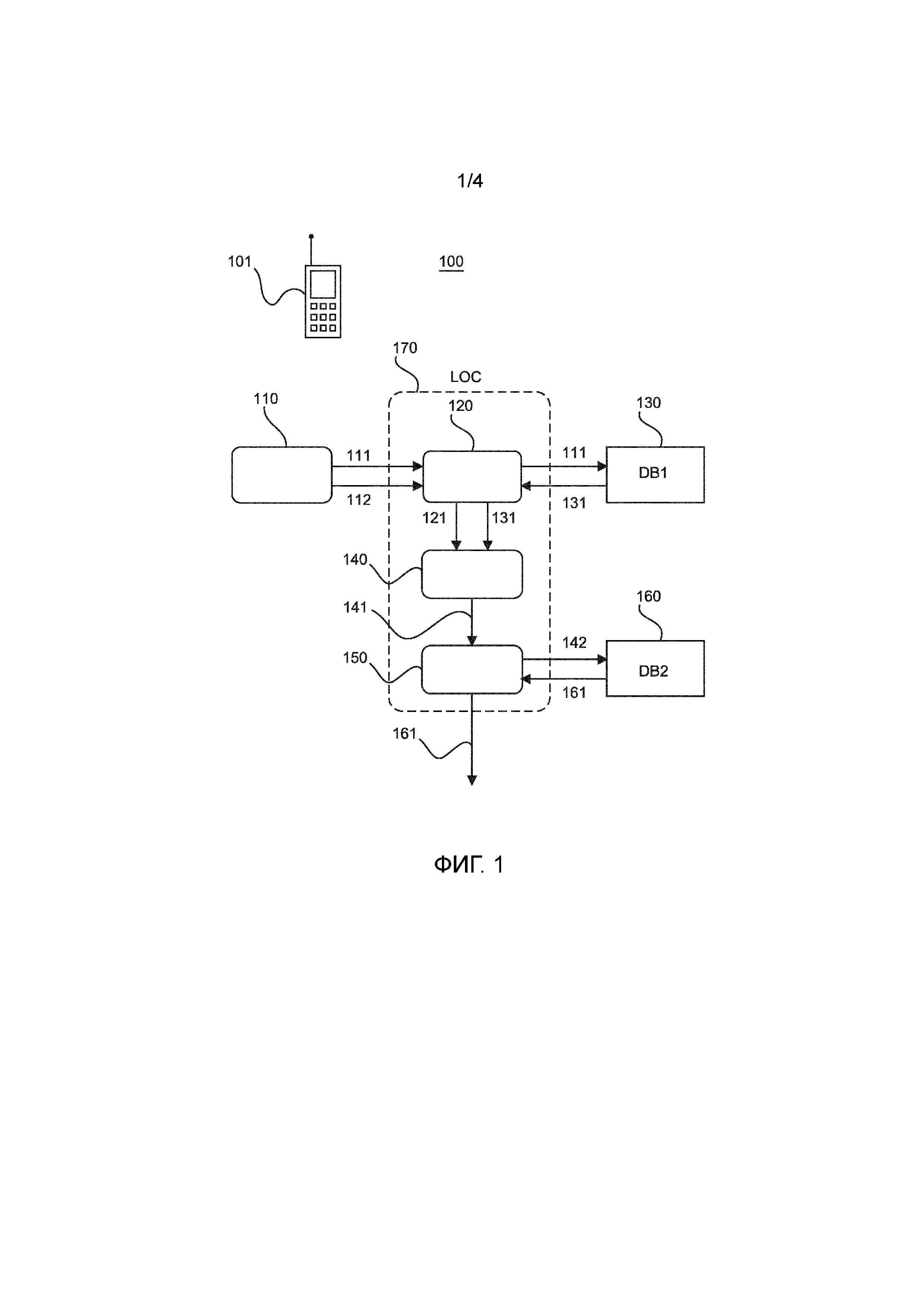
Фиг. 1 показывает схематичную блок-схему устройства определения местоположения согласно первому варианту осуществления;
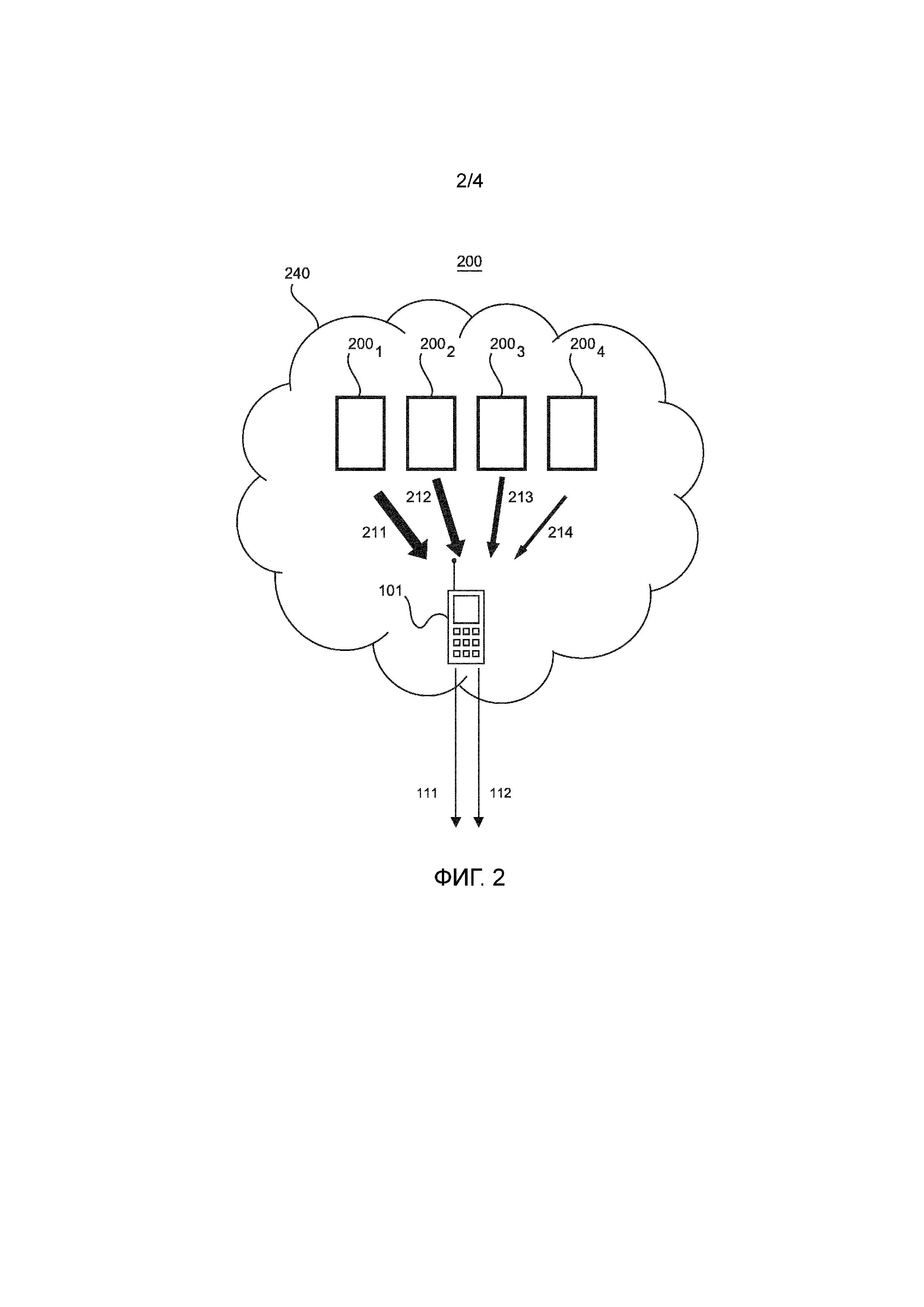
Фиг. 2 показывает схематичную архитектуру системы согласно первому варианту первого варианта осуществления, где целевой радиоблок принимает радиосигналы, отправленные анкерными узлами;
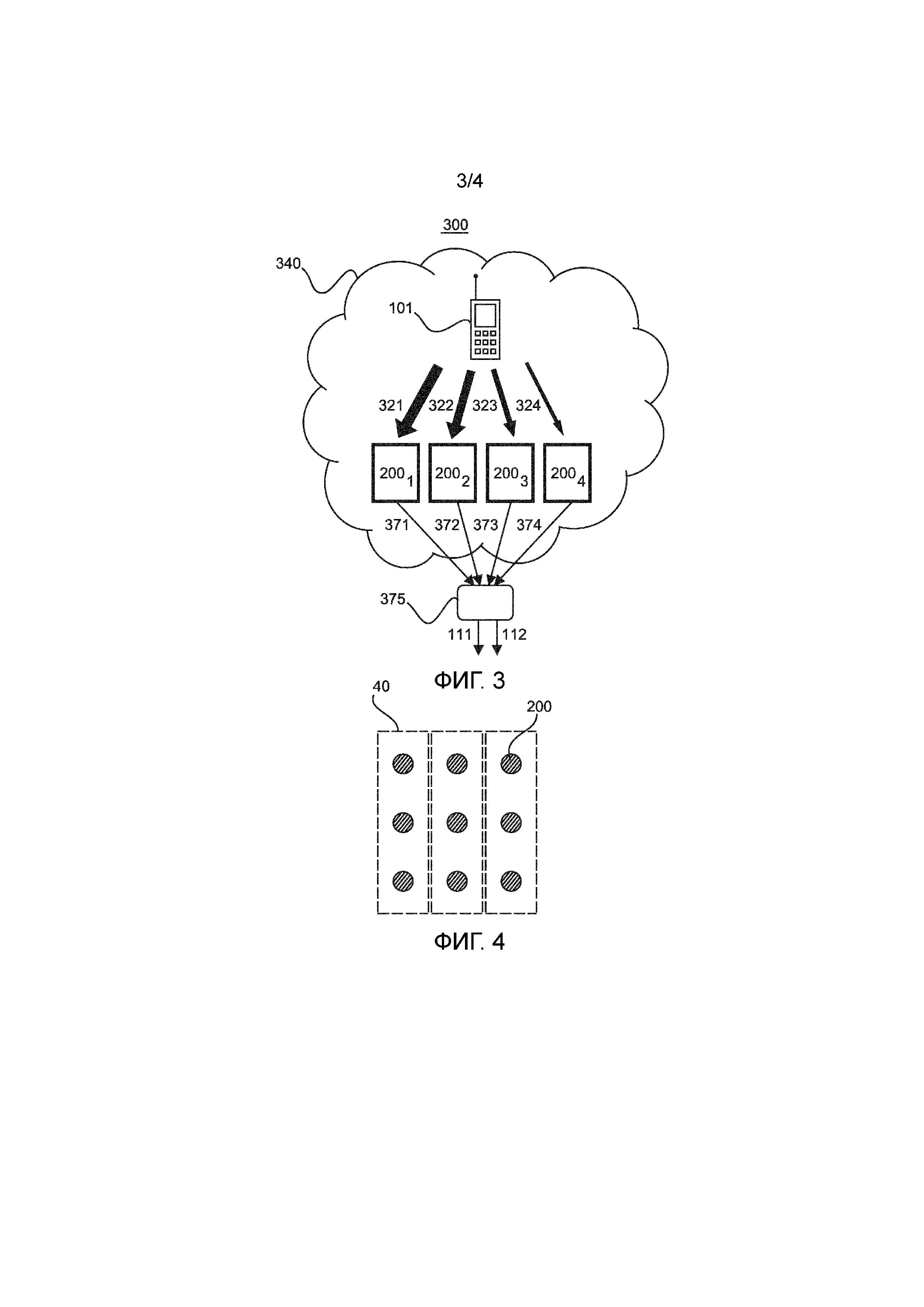
Фиг. 3 показывает схематичную архитектуру системы согласно второму варианту первого варианта осуществления, где анкерные узлы принимают радиосигналы, отправленные целевым радиоблоком;
Фиг. 4 показывает пример определения гиперзоны в вертикальном направлении;
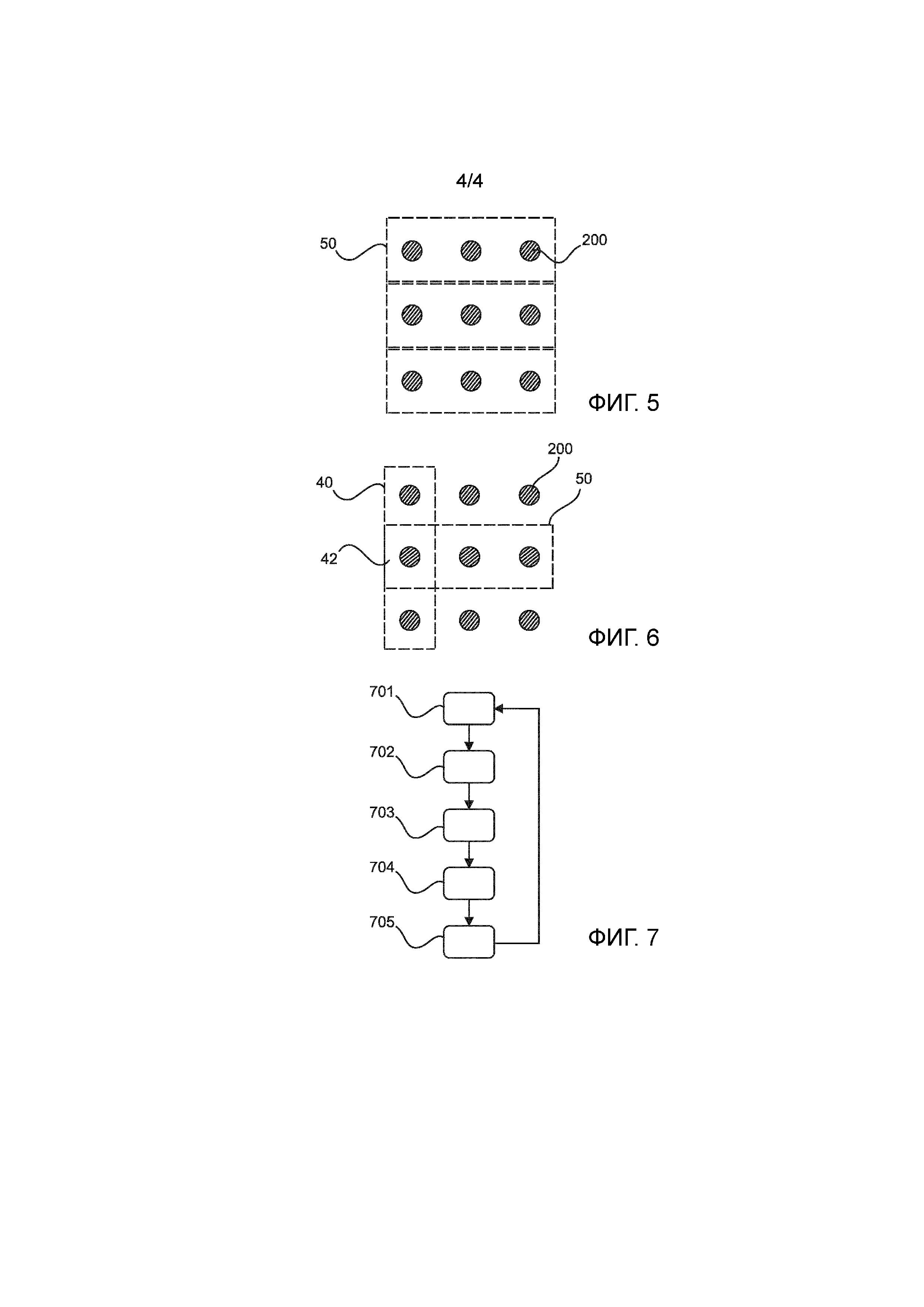
Фиг. 5 показывает пример определения гиперзоны в горизонтальном направлении;
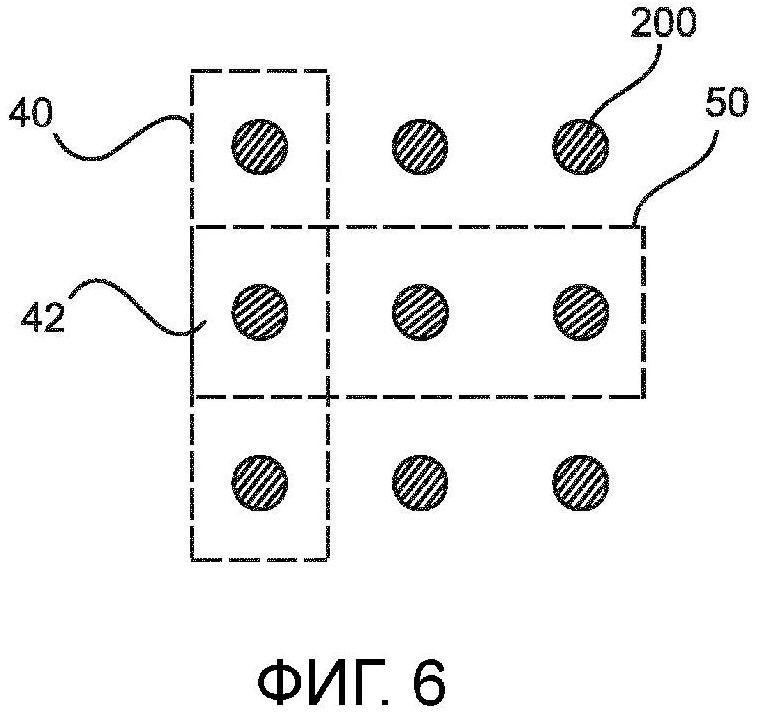
Фиг. 6 показывает пример окончательного результата зонирования на основании пересечения выбранных вертикальных и горизонтальных гиперзон; и
Фиг. 7 показывает блок-схему процедуры определения местоположения на основе зон согласно второму варианту осуществления.
Осуществление изобретения
Варианты осуществления настоящего изобретения теперь будут описаны на основе системы определения местоположения для системы внутри помещения с множеством радиоанкеров или анкерных узлов в известных местоположениях для определения местоположения радиоблока или мобильного узла с неизвестным местоположением.
Согласно различным вариантам осуществления для определения местоположения или позиционирования используется подход на основе зон, при этом в системе внутри помещения предусмотрена густая сеть анкерных узлов. Особенно интересна система освещения внутри помещения, в которой каждое осветительное устройство оборудовано радиоприемопередатчиком. В таких системах значения показателя уровня принимаемого сигнала (RSSI) или другие показатели качества сигнала могут быть получены для линии связи между мобильным узлом и каждым анкерным узлом. Однако следует отметить, что не имеет значения, получены ли значения RSSI мобильным узлом, когда каждый анкерный узел передает радиосигналы, или каждый анкерный узел получает значения RSSI, в то время как мобильный узел передает радиосигналы. Вследствие случайной природы свойств распространения радиоволн полученные значения RSSI также имеют случайную природу.
Достоверные результаты позиционирования достигаются посредством усреднения значительного числа значений RSSI или других показателей качества сигнала, и тех и других во времени и в пространстве. Усреднение по времени каждой линии связи может быть выполнено посредством определения среднего значения для множества RSSI из различных сигналов передачи (например, пакетов). Для выполнения операции усреднения в пространственной области множество соседних анкерных узлов группируются вместе, формируя зону. Среднее значение RSSI для каждой зоны затем получается посредством получения среднего значения для всех возможных линий связи между целевым мобильным узлом и анкерными узлами в зоне. Принципом, лежащим в основе подхода на основе зон, тогда является выбор максимального значения RSSI для каждой зоны, и целевой мобильный узел определяется как находящийся в географической области выбранной зоны анкерных узлов.
Согласно различным вариантам осуществления, местоположение целевого мобильного узла получается с помощью подхода на основе зон, где анкерные узлы делятся на множество гиперзон по меньшей мере двумя различными способами для получения по меньшей мере двух различных типов гиперзон. Затем применяется двухэтапный подход зонирования, в котором для каждого типа гиперзоны выбирают одну гиперзону на основании средних значений RSSI для линий связи между мобильным узлом и анкерными узлами в гиперзоне, и затем пересечение выбранных гиперзон различных типов принимают в качестве конечного результата зонирования для целевого мобильного узла.
В качестве примера, различные способы деления гиперзон на различные типы могут быть ортогональны друг другу таким образом, что различные типы гиперзон проходят в ортогональных направлениях. При необходимости, гиперзоны единого рассматриваемого типа могут быть частично перекрывающимися.
Фиг. 1 показывает схематичную блок-схему системы 100 определения местоположения согласно первому варианту осуществления с блоком 110 измерения, блоком 120 идентификации, блоком 140 выбора и блоком 150 пересечения и двумя базами 130 и 160 данных (DB1, DB2). Две базы данных могут быть реализованы посредством соответствующих таблиц поиска или областей памяти единого устройства хранения данных. Блок 110 измерения выполнен с возможностью выбора анкерных узлов (не показаны на фиг. 1) и измерения уровней сигнала между радиоблоком 101 и выбранными анкерными узлами. Блок 110 измерения передает идентификаторы 111 анкерных узлов и соответствующие значения 112 уровня сигнала (например, значения RSSI) блоку 120 идентификации. Блок 120 идентификации выполнен с возможностью выбора из первой базы 130 данных идентификаторы 131 гиперзон двух типов анкерной группы для гиперзон, которые соответствуют идентификаторам 111 анкерного узла, и затем вычислять значения 121 уровня сигнала гиперзоны для выбранных анкерных групп гиперзон каждого типа. Значения 121 уровня сигнала гиперзоны являются едиными значениями, которые представляют уровень сигнала соответствующей анкерной группы гиперзоны, и могут быть вычислены как среднее значений уровня сигнала анкерных узлов анкерной группы соответствующей гиперзоны. Блок 140 выбора затем принимает от блока 120 идентификации идентификаторы 131 гиперзон различных типов и соответствующие вычисленные значения 121 уровня сигнала гиперзоны и выбирает для каждого типа гиперзон гиперзону с наивысшим уровнем сигнала группы, при этом выбранные гиперзоны каждого типа идентифицируются по их идентификаторам 141 гиперзоны. Наконец, блок 150 пересечения принимает, от блока 140 выбора, идентификаторы 141 гиперзон каждого типа группы и определяет идентификатор 142 области пересечения для области пересечения двух идентифицированных гиперзон различных типов. На основании определенного идентификатора 142 области пересечения блок 150 пересечения выбирает координаты 161 области, которые соответствуют идентификатору 142 области пересечения, из второй базы 160 данных. Извлеченные координаты 161 области представляют оцененное местоположение радиоблока 101. Блок 150 пересечения затем представляет координаты 161 области в качестве окончательных выходных данных устройства 100 определения местоположения.
На фиг. 1, объединенные блоки 120, 140, 150 идентификации, выбора и пересечения могут содержаться в блоке 170 определения местоположения, который выполнен в виде программируемого блока обработки для выполнения операций и вычислений для получения оцененного местоположения радиоблока 101 из значений 112 уровня сигнала и соответствующих идентификаторов 111 анкерных узлов.
Фиг. 2 и 3 показывают два различных варианта осуществления с четырьмя анкерными узлами 2001-2004 и целевым радиоблоком 101, в которых радиоанкеры и радиоблок системы 200 определения местоположения действуют в различных ролях в качестве источника и приемника сигнала показателя уровня или качества сигнала. Таким образом, два варианта осуществления включат в себя функциональность вышеупомянутого блока 110 измерения на фиг. 1. Система 200 определения местоположения предусматривается в сети 240 связи (например, сети освещения), которая изображается как облако 240.
В варианте осуществления на фиг. 2 целевой радиоблок 101 выполнен с возможностью приёма радиосигналов, отправляемых анкерными узлами 2001-2004, таким образом, что целевой радиоблок 101 действует как приемник, а анкерные узлы 2001-2004 действуют как отправители. Радиоблок 101 принимает сигналы 211-214 с различным уровнем или качеством сигнала (указанными посредством толщины соответствующих стрелок на фиг. 2) от анкерных узлов 2001-2004. Радиоблок 915 измеряет уровни сигналов 211-214 и передает идентификаторы 111 анкерных узлов и соответствующие значения 112 уровней сигналов блоку 120 выбора на фиг. 1. Таким образом, как указано выше, изображенное облако 240, содержащее целевой радиоблок 101 и множество анкерных узлов 2001-2004, может быть интерпретировано как вариант осуществления блока 110 измерения на фиг. 1.
В альтернативном варианте осуществления на фиг. 3 анкерные узлы 2001-2004 выполнены с возможностью приёма радиосигналов 321-324 с различным уровнем или качеством сигнала (указанным посредством толщины соответствующих стрелок на фиг. 3) от целевого радиоблока 101 системы 300 определения местоположения. Таким образом, на фиг. 3, целевой радиоблок 101 действует как отправитель, а анкерные узлы 2001-2004 действуют как приемник, как изображено в облаке 340. Анкерные узлы 2001-2004 выполнены с возможностью приёма сигналов 321-324 от радиоблока 101 с различными уровнями или качеством сигнала и передачи соответствующих значений 371-374 уровня сигнала блоку 375 сбора, который выполнен с возможностью сбора значений 112 уровня сигнала от анкерных узлов 2001-2004 и передачи значений 112 уровня сигнала и соответствующие идентификаторы 111 анкерных узлов блоку 120 выбора на фиг. 1. Таким образом, как указано выше, комбинация блока 175 сбора и изображенного облака 340, содержащего целевой радиоблок 101 и множество анкерных узлов 2001-2004, может быть интерпретирована как вариант осуществления блока 110 измерения на фиг. 1.
В варианте осуществления целевой радиоблок 101 может быть мобильным телефоном, принимающим радиосигналы, передаваемые анкерными узлами 2001-2004 (например, радиоприемопередатчиками осветительных устройств системы освещения). Мобильный телефон измеряет уровни или качества сигналов для радиосигналов и вычисляет оцененное местоположение мобильного телефона с помощью уровней или значений качества сигнала. Для выполнения этого мобильный телефон может содержать блок определения местоположения для вычисления оцененного местоположения на основании области или района пересечения выбранных гиперзон различных типов, а также базы(баз) данных или таблицы(таблиц) поиска, которые ассоциируют анкерные узлы с анкерными группами связанных гиперзон различных типов, и которые ассоциируют определенную область пересечения со связанными координатами области.
В разновидности предыдущего варианта осуществления мобильный телефон может измерять радиосигналы 211-214, передаваемые анкерными узлами 2001-2004, но, в отличие от предыдущего варианта осуществления, мобильный телефон может не содержать блок определения местоположения. Вместо этого, мобильный телефон отправляет измеренные значения 111 уровня сигнала, через линию связи (не показана), центральному блоку программирования (не показан), содержащему блок определения местоположения, который вычисляет оцененное местоположение из принятых измеренных значений уровня сигнала.
Фиг. 4 и 5 показывают иллюстрации примеров определений гиперзон двумя ортогональными способами, например, в вертикальном и горизонтальном направлении, соответственно.
Для предложенного подхода гиперзонирования из примеров вариантов осуществления девять анкерных узлов 200 делятся двумя различными и ортогональными способами на три гиперзоны, включающие в себя соответствующие анкерные группы из трех анкерных узлов 200, т.е., первый тип гиперзон 40 в вертикальном направлении и второй тип гиперзон 50 в горизонтальном направлении, как иллюстрировано на фиг. 4 и 5.
Далее, для каждого набора гиперзон различного типа, который определен двумя различными способами, выполняется независимая операция зонирования. Например, для гиперзон 40 в вертикальном направлении на фиг. 4 может быть решено, что целевой мобильный узел находится в зоне, соответствующей максимальному среднему значению уровня или качества сигнала (например, значению RSSI) каждой зоны. В качестве примера может быть идентифицирована самая левая гиперзона 40 на фиг. 4. Аналогично, может быть выбрана гиперзона в горизонтальном направлении. В качестве примера может быть предположено, что идентифицируется средняя гиперзона 50 на фиг. 5.
Фиг. 6 показывает пример окончательного результата зонирования на основании пересечения выбранных вертикальных и горизонтальных гиперзон. Как описано выше в связи с фиг. 1-3, окончательный результат зонирования может быть получен с помощью области или района 42 пересечения идентифицированных гиперзон 40, 50 различных ортогональных типов. Этот район 42 пересечения идентифицированных гиперзон 40, 50 может затем быть выведен в качестве окончательного результата зонирования для местоположения целевого мобильного телефона.
Главным преимуществом предложенного подхода гиперзонирования является то, что уточненные результаты определения местоположения пользователя могут быть получены без увеличения плотности анкерных узлов 200. Как описано выше, каждая гиперзона будет состоять из множества анкерных узлов 200. Следовательно, операция усреднения уровня или качества сигнала в пространстве по-прежнему выполняется для достижения достоверных результатов зонирования. Беря пересечение идентифицированных гиперзон в ортогональных направлениях, получаются меньшие зоны, которые ведут к более высокому разрешению результата определения местоположения, без компрометирования достоверности характеристик зонирования. Если анкерные узлы 200 на фиг. 4-6 были разделены на девять зон, так что каждая зона соответствует одному анкерному узлу, одинаковое разрешение зон будет достигнуто, но преимущество пространственного усреднения для более высокой достоверности в результате зонирования будет потеряно.
Следует отметить, что топология и два способа деления гиперзон 40, 50 из девяти анкерных узлов 200 на фиг. 4-6 представлены в качестве простых иллюстративных примеров. Применение настоящего изобретения не ограничивается ни этой примерной топологией, ни двумя ортогональными способами деления гиперзон 40, 50. Может быть использовано любое другое деление, которое ведет к меньшим областям пересечения, такое как диагональное деление, круговое или эллиптическое деление, или любое деление по любым шаблонам различных типов с перекрывающимися или пересекающимися областями.
Фиг. 7 показывает блок-схему процедуры определения местоположения на основе зон согласно второму варианту осуществления.
На первом этапе 701 выбираются анкерные узлы, которые находятся в области действия целевого радиоблока с неизвестным местоположением, так что уровни или качества сигналов между анкерными узлами и целевым радиоблоком могут быть измерены. На последующем этапе 702 идентификаторы выбранных анкерных узлов используются для измерения уровней или качества сигналов между целевым радиоблоком и радиоанкерами. На этапе 703 полученные идентификаторы анкерных узлов и соответствующие уровни или качества сигналов используются для получения связанных гиперзон анкерных узлов и вычисления группового уровня или качества (например, среднего уровня или качества сигнала для анкерных узлов гиперзоны) для каждой гиперзоны. Затем на этапе 704 выбираются гиперзоны с наивысшим уровнем сигнала группы. Наконец, на этапе 705, область пересечения выбранных гиперзон каждого типа определяется, например, на основании таблицы поиска или арифметической логики с помощью идентификаторов гиперзон, и координаты или другое географическое указание области пересечения выводится в качестве оцененного местоположения целевого радиоблока. Стрелка, начинающаяся с этапа 705 обратно к этапу 701, указывает, что способ определения местоположения может непрерывно повторяться.
Резюмируя вышеуказанное, описаны способ и система для уточненного зонирования через пересечение, при этом анкерные узлы 200 системы позиционирования на основе зон делятся на множество гиперзон 40, 50 различными способами, причём различные способы деления гиперзон могут быть ортогональны друг другу, с возможно частичным перекрытием. Для каждого способа деления гиперзон 40, 50 наиболее вероятно возможная гиперзона выбирается на основании пользовательского способа зонирования. После этого пересечение 42 идентифицированных гиперзон принимается в качестве окончательного результата определения местоположения мобильного узла, местоположение которого должно быть определено, чтобы таким образом достичь повышенной точности определения местоположения пользователя без повышения плотности анкерных узлов 200.
При том, что изобретение было иллюстрировано и описано подробно на чертежах и в вышеприведённом описании, такие иллюстрация и описание должны считаться иллюстративными и примерными, а не ограничивающими. Изобретение не ограничено раскрытыми вариантами осуществления. Выбор соответствующих гиперзон может быть основан на других показателях уровня или качества сигнала, таких как частота ошибок, отношение сигнал-шум и т.д. Предложенный подход определения местоположения на основе зон может быть использован в применениях в розничной торговле, промышленности, гостиничном бизнесе и вне помещений, или для освещения на основе местоположения пользователя или других функций управления.
Другие изменения в раскрытых вариантах осуществления могут быть понятны специалистами в данной области техники, применяющими на практике заявленное изобретение, и реализованы ими на основании изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, а форма единственного числа не исключает множества. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам по себе тот факт, что определенные средства упомянуты в различных зависимых пунктах формулы изобретения, не означает того, что сочетание этих средств не может быть использовано с достижением преимущества.
Вышеприведённое описание раскрывает подробности конкретных вариантов осуществления изобретения. Однако следует понимать, что вне зависимости от того, как вышеупомянутое подробно описано в тексте, изобретение может быть осуществлено на практике множеством способов и, следовательно, не ограничено раскрытыми вариантами осуществления. Следует отметить, что использование определённой терминологии при описании некоторых признаков или аспектов изобретения не следует рассматривать как подразумевающее, что терминология переопределена в данном документе для ограничения включением каких-либо конкретных характеристик признаков или аспектов изобретения, с которыми ассоциирована эта терминология.
Один блок или устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам по себе тот факт, что определенные средства упомянуты в различных зависимых пунктах формулы изобретения, не означает того, что сочетание этих средств не может быть использовано с достижением преимущества.
Описанные операции, аналогичные тем, которые указаны на фиг. 7, или операциям блоков 120, 140 и 150 на фиг. 1, могут быть реализованы в виде программного кодового средства для компьютерной программы и/или в виде специализированных аппаратных средств. Компьютерная программа может быть сохранена или может распространяться на подходящем носителе, таком как оптический носитель хранения или твердотельный носитель, поставляемый вместе с другими аппаратными средствами или как их часть, но может также распространяться в других формах, например, через Интернет или другие проводные или беспроводные системы связи.
Система и способ воплощения уменьшения яркости, проводимого на основе сигнала сети, твердотельного осветительного модуля
Схема интерфейса
Модифицированный светодиодный модуль снаружи герметизированной стеклянной трубки
Адаптивно управляемая система наружного освещения и способ ее работы
Осветительное устройство и приемник
Автоматическая подготовка к эксплуатации устройств сетевой системы управления
Светильник
Сборка монтажной платы
Проводной осветительный модуль с трехмерной топографией
Устройство освещения с рч антенной
Осветительная система и способ обработки света
Эффективное назначение адресов в системах кодированного освещения
Передача и прием кодированного света
Осветительное устройство и приемник
Способ и устройство для осуществления связи посредством видимого света
Протоколы для передачи данных кодированным светом
Способы для адаптивного управляемого освещения на основе транспортного потока в наружных осветительных сетях
Определение местоположения

