Результат интеллектуальной деятельности: Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур
Вид РИД
Изобретение
Изобретение относится к сельскохозяйственному машиностроению, а именно к транспортно-технологическим средствам с оборудованием для химической обработки сельскохозяйственных культур.
Известен опрыскиватель штангового типа для обработки сельскохозяйственных культур (патент RU 123630, A 01С 23/00, 2013), содержащий раму, шасси, энергоустановку, систему опрыскивания с емкостями для рабочих растворов, трубопроводами, арматурой и штангой.
К недостаткам известного устройства можно отнести сложность конструкции, состоящей из тягового модуля и прицепного шасси, пониженные показатели проходимости, маневренности, тягово-сцепные свойства и повышенное уплотняющее воздействие на почву, а также присутствие человека в зоне обработки химикатами для управления опрыскивателем.
Известен опрыскиватель штангового типа (патент RU 2496585, B05B7/06, 2013), содержащий энергоустановку, систему опрыскивания с емкостями для рабочих растворов, трубопроводами, арматурой и штангой.
К недостаткам известного устройства можно отнести необходимость применения грузового автомобильного или тракторного шасси для транспортировки системы опрыскивания, в т.ч. и в процессе выполнения технологической операции, пониженные показатели проходимости, маневренности, тягово-сцепные свойства и повышенное уплотняющее воздействие на почву, а также присутствие человека в зоне обработки химикатами для управления опрыскивателем.
Наиболее близким по технической сущности к заявленному устройству является самоходный робот-опрыскиватель культур (RU 2 592904, A 01 С 23/00, 2016), содержащий раму, шасси, ходовую систему и привод, систему управления, энергоустановку, систему опрыскивания с емкостями для рабочих растворов, трубопроводами, арматурой и штангой.
Недостатки известного устройства обусловлены колесной ходовой системой и ее приводом и связаны с ухудшением эксплуатационных показателей опрыскивателя, а именно с повышенным уплотняющим воздействием на почву, растительный покров и корневую систему растений, пониженными проходимостью, маневренностью, тягово-сцепными свойствами, плавностью хода, грузоподъемностью, навесо- и прицепоспособностью, особенно в условиях повышенной влажности и малой несущей способности почв, а также ограниченной функциональностью применительно к номенклатуре обрабатываемых сельскохозяйственных культур и ограниченными возможностями агрегатирования с другими сельскохозяйственными машинами и оборудованием.
Технической задачей предлагаемого изобретения является улучшение эксплуатационных показателей опрыскивателя в части снижения уплотняющего воздействия на почву, растительный покров и корневую систему растений с одновременным повышением равномерности распределения давления на опорную поверхность, повышения проходимости, маневренности, тягово-сцепных свойств, плавности хода, грузоподъемности, навесо- и прицепоспособности с обеспечением всесезонности машины и возможностью ее работы в любых почвенно-климатических условиях и агрозонах страны, в т.ч. в условиях повышенной влажности и малой несущей способности почв, расширения функциональных возможностей машины по номенклатуре обрабатываемых культур за счет способности работы в различных междурядьях, а также по возможности агрегатироваться с другими технологическими машинами и оборудованием.
Поставленная техническая задача достигается тем, что у роботизированного гусеничного опрыскивателя для химической обработки сельскохозяйственных культур, включающего систему опрыскивания с емкостью для рабочего раствора, трубопроводами, арматурой, штангой и узлами форсунок, смонтированной на шасси, содержащем раму, ходовую систему и привод, энергетическую установку и систему управления, согласно изобретению, рама выполнена портальной с увеличенным агротехническим просветом с возможностью изменения колеи путем перемещения модулей ходовой системы в поперечном направлении параллельно опорной поверхности и снабжена, по крайней мере, двумя направляющими, размещенными по бортам, а модули ходовой системы выполнены гусеничными c независимым электрическим или гидравлическим приводом на каждое ведущее колесо, c упругой подвеской и возможностью установки гусениц различной ширины.
Изобретение поясняется чертежами.
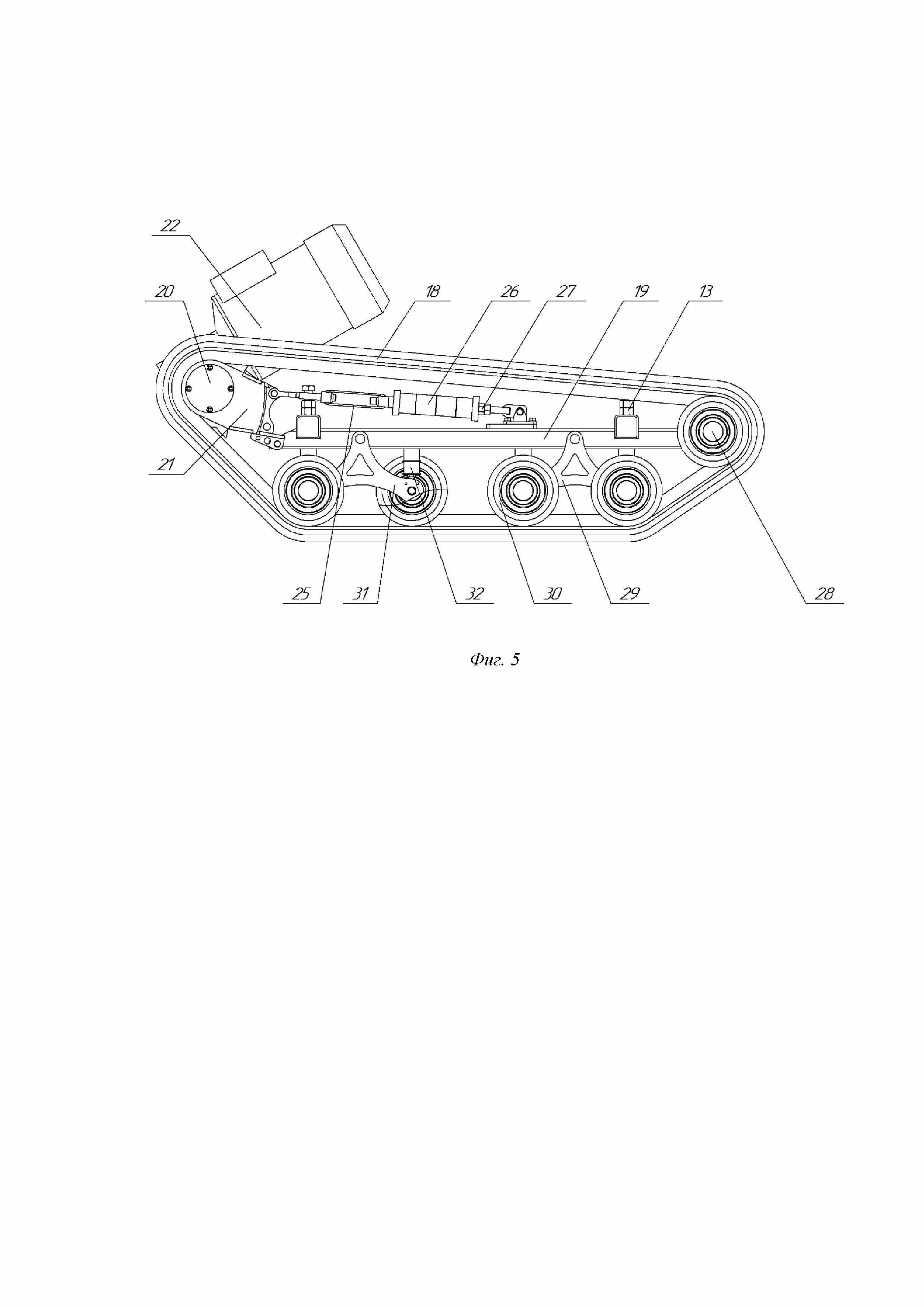
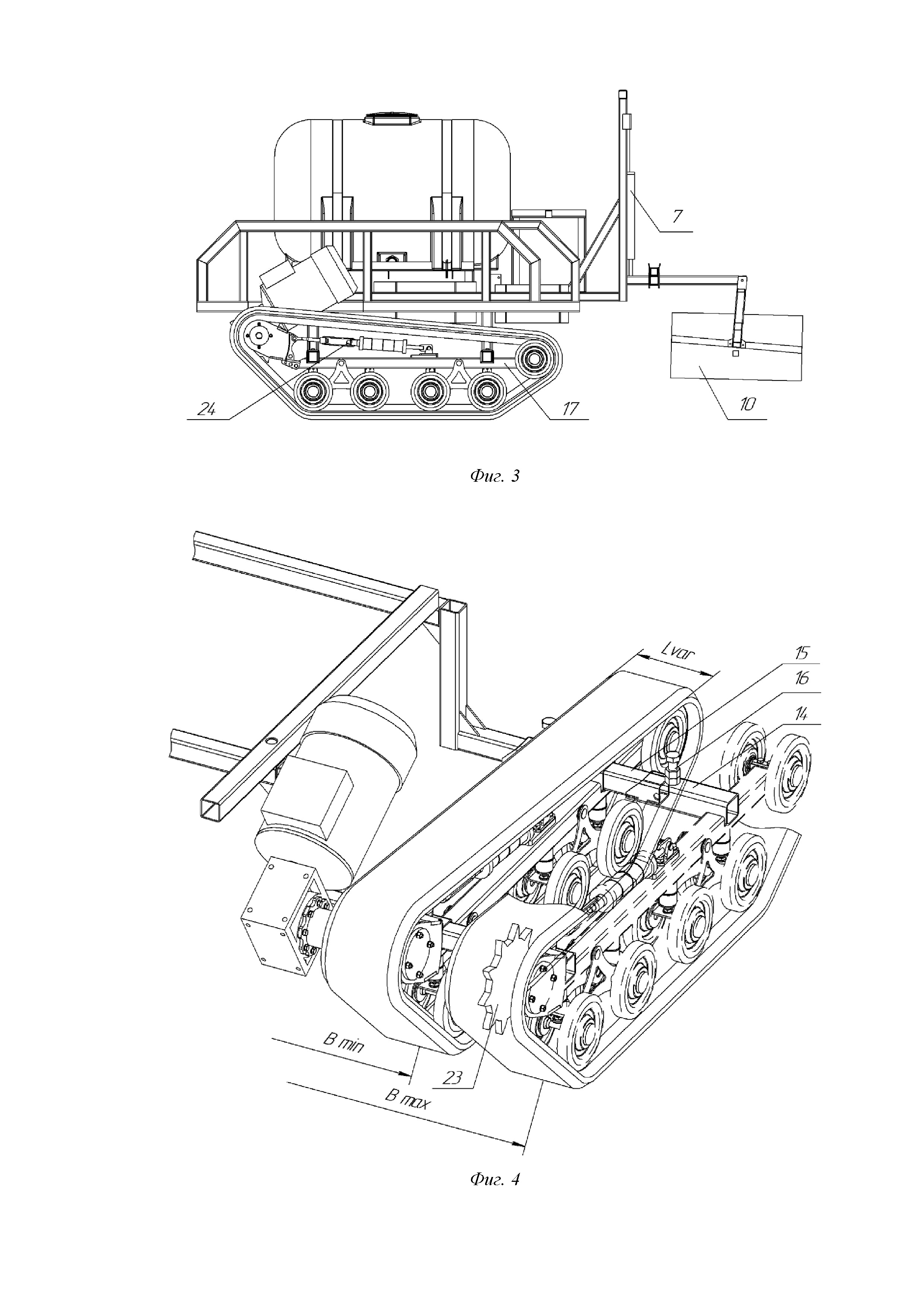
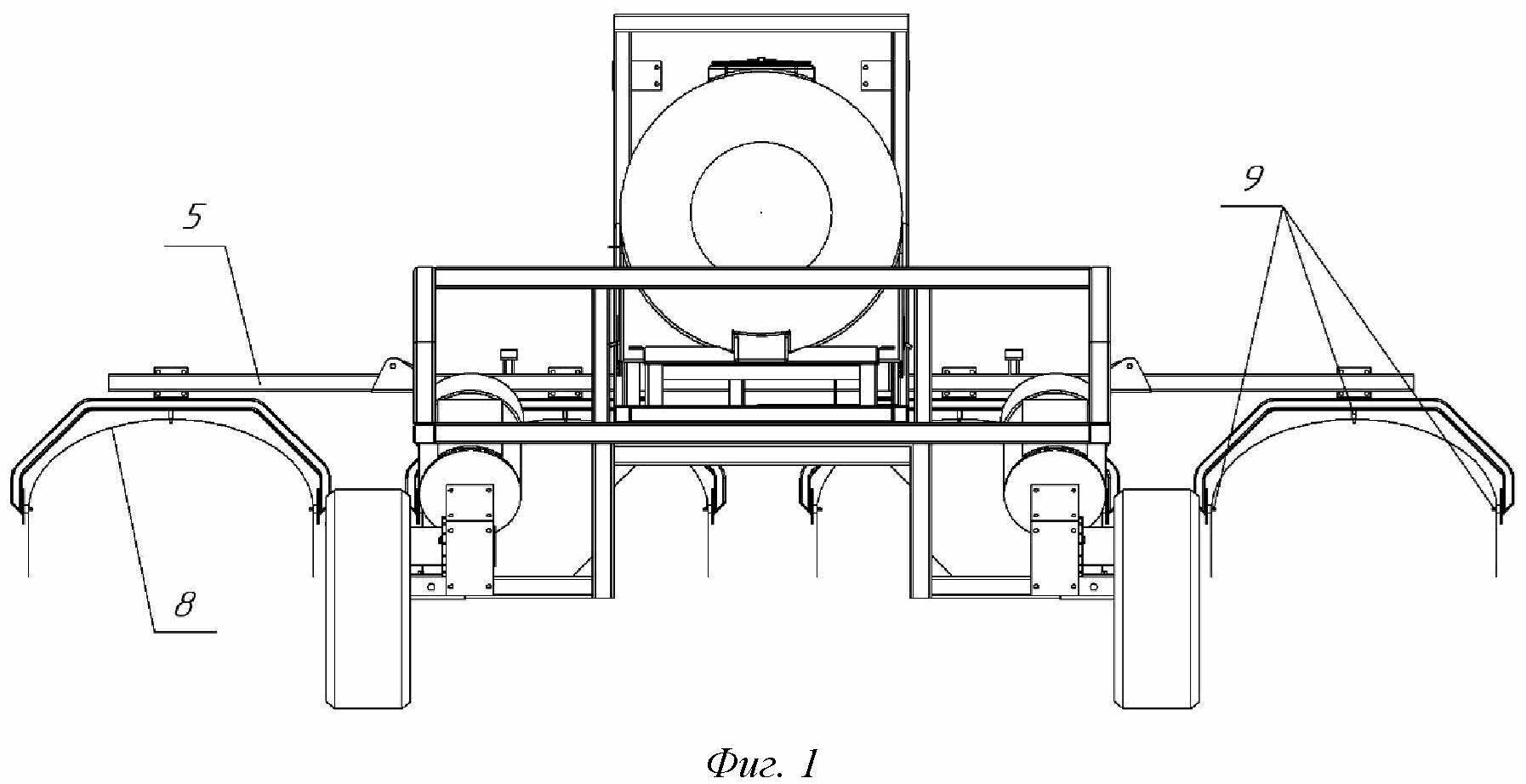
На фиг. 1 схематично представлен роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур, вид спереди; на фиг. 2 – то же вид сверху; а на фиг. 3 – то же вид сбоку; на фиг. 4 – аксонометрическая проекция ходовой системы с механизмом регулировки колеи; на фиг. 5 – общий вид модуля гусеничной ходовой системы.
Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур состоит из рамы 1, блока управления системой опрыскивания 2, энергоустановки 3 в виде аккумуляторных батарей. Система опрыскивания содержит емкость 4 для рабочего раствора, штангу 5, датчики 6 высоты и наличия растений, электрический цилиндр 7 для регулирования высоты расположения штанги. На штанге 5 расположены узлы 8, каждый из которых содержит форсунки 9 и защитный кожух 10. Штанга 5 с узлами 8 форсунок 9 имеет возможность автоматически адаптироваться под высоту обрабатываемых растений, путем поднятия и опускания ее электрическим цилиндром 7. В систему опрыскивания также входит устройство подготовки и подачи растворов 11, включающее насосное оборудование, емкость, устройство смешения растворов и распределитель их дифференцированного внесения. Размещенный в полости рамы 1 программируемый контроллер 12 управляет движением шасси опрыскивателя и включением/выключением системы опрыскивания. Посредством механизма регулировки колеи 13, включающего направляющую внешнюю 14, направляющую внутреннюю 15, винтовой фиксатор 16, к раме 1 крепятся, по меньшей мере, два гусеничных модуля 17. Модуль гусеничной ходовой системы 17 включает гусеницу 18, раму ходовой системы 19, узел привода 20, состоящий из подрамника 21, мотор-редуктора, электромотор-колеса или гидронасос-моторной установки 22 с закрепленным на ней ведущим колесом 23 и связанного с рамой ходовой системы 19 посредством амортизационно-натяжного устройства 24, в свою очередь состоящего из винта натяжения гусеницы 25, амортизационного устройства 26 в виде упругих элементов, механизма поджатия 27 упругих элементов амортизационно-натяжного устройства. Также на раме ходовой системы расположены направляющее колесо 28 и балансирные каретки 29, включающие опорные катки 30, соединенные подвижным балансиром 31, связанным с рамой ходовой системы 19 посредством упругих элементов подвески 32.
Устройство работает следующим образом.
Перед началом технологического процесса химической обработки растений в зависимости от их вида и ширины междурядий выставляют на определенном расстоянии друг от друга узлы 8 форсунок 9 на штанге 5, а также колею машины при помощи механизма регулировки 13, для чего необходимо ослабить винтовой фиксатор 16 механизма регулировки колеи и переместить модуль гусеничной ходовой системы 17 в соответствии с требуемым значением ширины междурядья. Для обеспечения необходимых защитных зон различных сельскохозяйственных культур и соблюдения требований по уплотняющему воздействию на почву, особенно по распределению давления под опорной поверхностью, на роботизированный гусеничный опрыскиватель могут устанавливаться гусеницы 18 различной ширины, в т.ч. ленточные и резиноармированные.
Затем роботизированный гусеничный опрыскиватель заезжает в рядки обрабатываемых сельскохозяйственных культур. Блок управления 2 системой опрыскивания в автоматическом режиме на основании показаний датчиков, в т.ч. датчиков 6 высоты и наличия растений, в зависимости от вида и агротехнологических свойств растений (высоты, наличия, частоты и густоты произрастания, схемы расположения рядков и т.д.) осуществляет подготовку рабочего раствора путем смешивания составляющих в определенной пропорции, подстройку насосного оборудования по напору и расходу раствора в сечении форсунок, степени его распыления (дисперсности), устанавливает оптимальное количество одновременно задействованных узлов форсунок и самих форсунок в частности, а также высоту расположения штанги 5. Высота расположения штанги 5 регулируется электрическим цилиндром 7. Движением машины управляет программируемый контроллер 12, который обрабатывает входящие сигналы с датчиков, в т.ч. инфракрасных датчиков дистанции и наличия препятствий (на фиг. не показаны), создает управляющие сигналы на основе заложенного алгоритма программы обработки данных или радиочастотного ресивера, принимающего сигналы с пульта дистанционного управления. Сформированные контроллером 12 управляющие сигналы подаются на исполнительные механизмы для воздействия на элементы электрического или гидравлического привода гусеничных модулей 17. Кроме того, контроллер 12 осуществляет подачу питания на систему опрыскивания и управление насосом, обеспечивающего подачу и прекращение подачи рабочего раствора в систему опрыскивания. Проходя через форсунки 9, рабочий раствор в мелкодисперсном состоянии подается на сельскохозяйственные растения.
Маневрирование роботизированного гусеничного опрыскивателя обеспечивается за счет побортного регулирования скорости вращения гусениц 18, приводимых мотор-редукторами, электромотор-колесами или гидронасос-моторной установкой 22. Натяжение гусениц 18, а также защита гусеничных модулей 17 ходовой системы от многократных перегрузок обеспечивается амортизационно-натяжным устройством 24 с винтом натяжения 25, упругими элементами 26, предварительно поджатых гайкой 27. Снижение уплотняющего воздействия на почву и вибронагруженности достигается за счет подвижности балансирных кареток 29 и упругих элементов подвески 32.
При движении роботизированного гусеничного опрыскивателя узлы форсунок 8 обрабатывают растения химическими препаратами. Оператор имеет возможность управления движением машины и технологическим процессом опрыскивания дистанционно с помощью пульта управления.
Экономический эффект от применения роботизированного гусеничного опрыскивателя для обработки сельскохозяйственных культур заключается в повышенной безопасности процесса химической обработки растений за счет исключения человека из зоны обработки химикатами, повышении качества обработки растений, в том числе, в труднодоступных местах, за счет обеспечения постоянной скорости движения машины и подачи химикатов в зону обработки, расширении номенклатуры обрабатываемых сельскохозяйственных культур за счет возможности встраиваться в различные по размерам междурядья, снижении уплотняющего воздействия на почву, корневую систему растений и растительный покров, повышении тягово-сцепных свойств машины, что обеспечивает возможность ее применения в любых почвенно-климатических условиях и агрозонах РФ.
Роботизированный гусеничный опрыскиватель для химической обработки различных сельскохозяйственных культур находится на стадии модернизации опытного образца. Оценка его функциональных качеств проводилась в частности на опытных полях ФГБНУ ВНИИКХ им. А.Г. Лорха в междурядьях всходов картофеля при внесении в почву жидких минеральных удобрений. Опытный образец получил высокую оценку специалистов.
Созданный опытный образец роботизированного гусеничного опрыскивателя для обработки сельскохозяйственных культур обеспечивает следующие количественные показатели: снижение максимального значения давления на почву до 48 кПа, что в соответствии с ГОСТ 26955-86 практически вдвое меньше допустимого максимального давления в весенний период при влажности почвы свыше 0,9 НВ, увеличение равномерности распределения давления под опорной ветвью гусениц до 30 % по сравнению металлическими обводами, как следствие повышение урожайности культур, исключение вредных выбросов в виду применения электрического или гидравлического привода, снижение уровня шума на 10 дБ и вибрации на 65-70% по сравнению с металлическими гусеницами, исключение вреда здоровью оператора при обработке растений удобрениями за счет применения системы дистанционного управления, универсальность в плане высокого (470 мм) агротехнического просвета и регулируемой колеи в пределах 1500-1800 мм, что позволяет использовать машину для обработки широкой номенклатуры сельскохозяйственных культур.
В сравнение с колесным прототипом площадь контакта модулей гусеничной ходовой системы больше в 9 раз. Это говорит о том, что при одной и той же полезной нагрузке уплотняющее воздействие на почву, корневую систему растений и растительный покров у предложенного изобретения будет значительно меньше, чем у колесного.
Кроме того, предлагаемый роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур обладает лучшей маневренностью – имеет возможность поворота с минимальным радиусом (половина колеи), вокруг центра масс тогда, как колесный прототип имеет возможность поворота с радиусом, существенно превышающим колею машины.
Еще одним преимуществом предлагаемого роботизированного гусеничного опрыскивателя является агрегатируемость, т.е. возможность установки вместо системы опрыскивания различных навесных, полунавесных, прицепных и полуприцепных сельскохозяйственных машин и орудий.
Так, помимо системы опрыскивания, можно установить дисковую борону, прицепные грабли (ворошилки), легкий прицепной культиватор, разбрасыватель удобрений с приводом от опорных колес, устройства для обработки растений излучением, картофелесажалку, косилку, пресс-подборщик, прожектор с фитолампой, дождевальную установку, кузовное оборудование, самосвальные прицепы, щетку, измельчитель веток, отвал, прикатывающий каток, взлетно-посадочную площадку и док-станцию для беспилотных летательных аппаратов (дронов), снегоочистители и пр. Данное преимущество дает возможность использовать предлагаемый роботизированный гусеничный опрыскиватель для химической обработки различных сельскохозяйственных культур не только в сельскохозяйственном производстве, но и на коммунальных операциях.
В настоящее время по результатам функциональных испытаний опытного образца роботизированного гусеничного опрыскивателя для обработки сельскохозяйственных культур проводится его всесторонняя модернизация.
Роботизированный гусеничный опрыскиватель для обработки сельскохозяйственных культур, включающий систему опрыскивания с емкостью для рабочего раствора, трубопроводами, арматурой, штангой и узлами форсунок, смонтированную на шасси, содержащем раму, ходовую систему и привод, энергетическую установку и систему управления, отличающийся тем, что рама выполнена портальной с увеличенным агротехническим просветом и возможностью изменения колеи путем перемещения модулей ходовой системы в поперечном направлении параллельно опорной поверхности и снабжена, по крайней мере, двумя направляющими, размещенными по бортам, а модули ходовой системы выполнены гусеничными c независимым электрическим или гидравлическим приводом на каждое ведущее колесо, c упругой подвеской и возможностью установки гусениц различной ширины.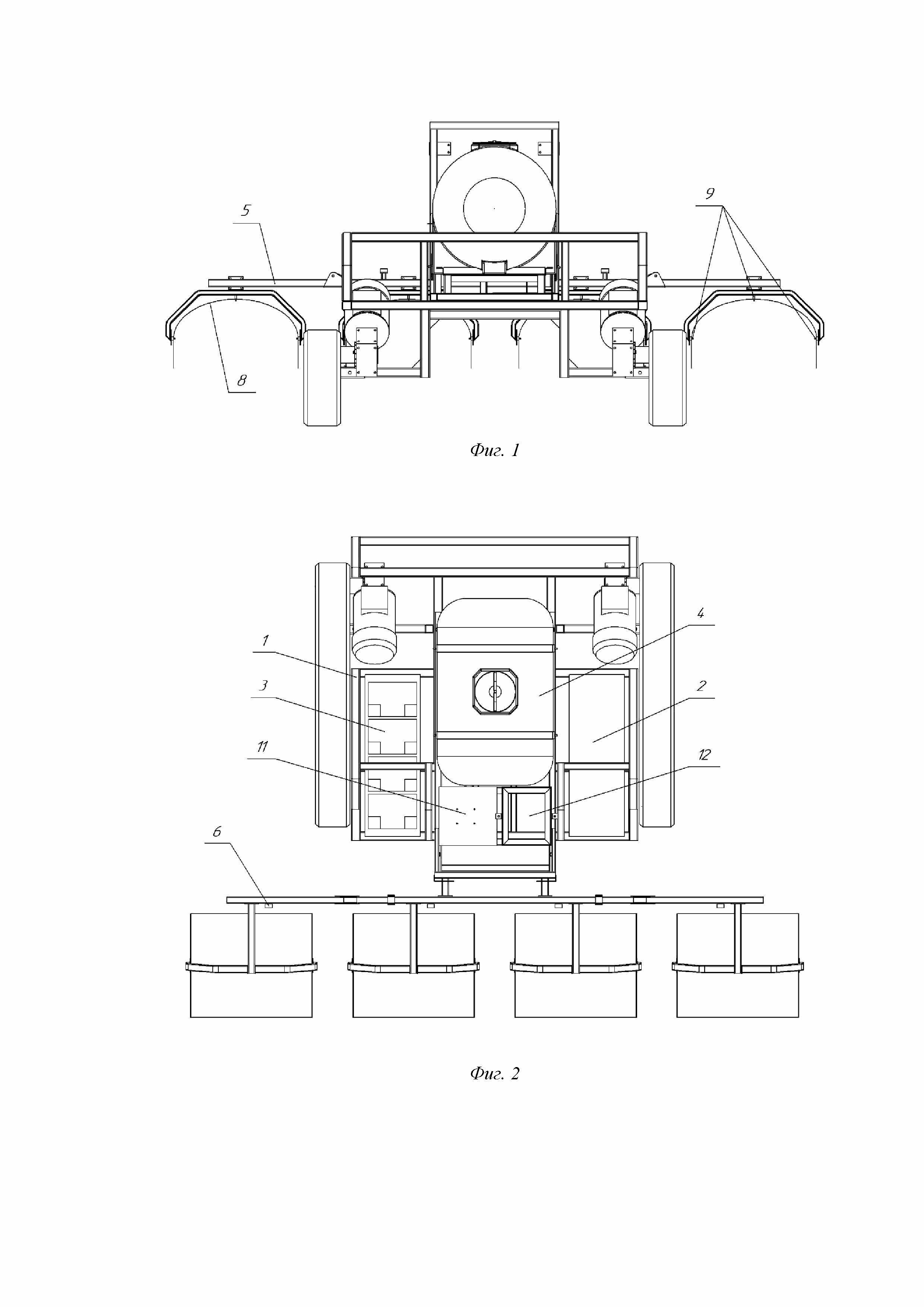
Устройство определения экономически и технологически оптимальных моментов времени замены режима кормления животных или птицы вволю на режим их дозированного ограниченного кормления
Устройство экономически оптимального дозирования жидкого или полужидкого водного раствора лекарственных препаратов животным и птице производства и реализации продукции бройлерной птицефабрики
Устройство экономически оптимального производства и реализации продукции бройлерной птицефабрики
Устройство экономичной транспортировки бройлеров из птичников в цех убоя и переработки птицефабрики магистральным транспортером
Способ и устройство экономически оптимальной осушительной и комплексной гидромелиорации с учетом экологической ценности участков земель
Параметрический резонансный генератор и способ возбуждения в генераторе электрических колебаний
Способ и устройство технологически и экономически оптимального озонирования движущихся сыпучих кормов для животноводства и птицеводства
Способ получения газообразного энергоносителя и органоминеральных удобрений из бесподстилочного навоза и устройство для его реализации
Устройство автоматического регулирования непрерывной подачи потока объектов переменного фракционного состава на линию сепарации
Ротационное устройство сухой чистки поверхностей агрообъектов для линии поточной сепарации
Способ транспортного обслуживания самоходных зерновых и кормоуборочных комбайнов системой мобильных средств, преимущественно авто(тракторными) поездами
Способ контейнерной перевозки, сушки и хранения семян
Роторный глубокорыхлитель
Платформа для сбора плодов
Комбинированный агрегат для полного цикла сбора отводков маточного корня
Самосвальное шасси со сменным кузовом для перегрузки зерна
Выносная секция фрезы садовой
Роторный вычесыватель-глубокорыхлитель
Агрегат для высева семенного материала в ленте
Способ контейнерной сушки семян и зерна и устройство для его осуществления

