Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КАБИНЫ ЛИФТА
Вид РИД
Изобретение
Изобретение относится к способу и системе для определения положения движущейся в шахте кабины лифтовой установки в соответствии с ограничительной частью независимых пунктов формулы.
Из уровня техники, например ЕР 1232008 В1, известно оборудование лифтовых установок камерой, которая закреплена на кабине и используется для съемки изображений шахты, а также для получения на этой основе информации о положении кабины. При этом детали шахты используются в качестве меток, которые снимаются камерой и обрабатываются соединенным с ней вычислительным блоком.
При этом недостаток заключается в том, что необходим учебный рейс, чтобы можно было присвоить детали шахты абсолютному положению кабины лифта. К тому же определение абсолютного положения с помощью такой системы связано с высокими затратами на вычисления.
Задачей настоящего изобретения является создание способа и системы описанного выше рода, которые позволили ли бы избежать недостатков известных способов и систем и, в частности, обеспечить надежное определение положения кабины лифта. Кроме того, предложенная система должна быть недорогой в изготовлении и эксплуатации.
Эта задача решается в предложенных способе и системе посредством признаков независимых пунктов формулы изобретения.
Предложенный способ определения положения перемещающейся в шахте кабины лифтовой установки, причем кабина оборудована датчиком ускорения, включает в себя следующие этапы.
На первом этапе происходит регистрация данных ускорения от датчика ускорения посредством вычислительного блока. Затем происходит расчет вычислительным блоком текущего положения и/или скорости кабины, исходя из начального положения и зарегистрированных данных ускорения. Положение или скорость кабины определяется, тем самым, в соответствии с инерциальной навигационной системой. Однако ясно, что вследствие свойств такой системы могут возникать задержки и погрешности, которые снижают надежность определения положения. Так, например, датчик ускорения не может однозначно отнести вибрации кабины к движению или помехе, так что в конечном результате вычисленное положение будет отличаться от фактического положения. При этом говорят о «дрифте» вычисленных позиционных данных в отношении реального положения кабины.
Датчик ускорения выполнен предпочтительно в виде 3-осевого датчика. При этом возможны и другие выполнения датчика. Однако важно, чтобы можно было регистрировать ускорения, возникающие в направлении движения кабины.
Согласно изобретению, лифтовая установка оборудована блоком регистрации изображений. Он закреплен в кабине и движется вместе с ней.
Для решения проблемы вычислительный блок сравнивает, согласно изобретению, снятые изображения с картированными изображениями шахты для определения основанного на изображениях текущего положения. Кроме того, вычислительный блок осуществляет новую калибровку текущего положения с использованием основанного на изображениях текущего положения. При этом в результате сравнения снятых изображений картированными изображениями создаются вторая возможность определения положения и, тем самым, дублирование предложенного способа.
Под картированными изображениями следует понимать изображения, представляющие собой в своей совокупности отображение шахты. Картированные изображения снимаются предпочтительно во время учебного рейса при пуске лифта в эксплуатацию и однозначно присваиваются положению кабины в шахте, благодаря чему становится возможным последующее определение основанного на изображениях положения. При этом картированные изображения вместе с соответствующими позиционными значениями хранятся в базе данных.
Следовательно, определение текущего положения происходит сначала посредством вычисленного текущего положения за счет собранных датчиком ускорения данных ускорения, пока снова не будет определено основанное на изображениях текущее положение и текущее положение не будет калибровано. Это препятствует так называемому «дрифту» вычисленного текущего положения за счет основанного на изображениях текущего положения. В таком варианте предпочтительно, что для новой калибровки кабине не приходится, как в способах и системах из уровня техники, прибывать на самый верхний и/или самый нижний этаж, а калибровка может происходить во всей шахте в любое время, например во время рейса.
Предпочтительно снимки изображений шахты делаются блоком регистрации изображений в заданный или задаваемый первый интервал времени. Два последовательно снятых изображения сравниваются между собой вычислительным блоком, чтобы определить пространственный сдвиг обоих изображений, причем для определения положения и/или скорости кабины данные ускорения привлекаются только тогда, когда пространственный сдвиг был выявлен вычислительным блоком с помощью снятых изображений. При этом сравниваемые вычислительным блоком изображения необязательно должны быть сняты непосредственно друг за другом.
Очевидно, что для повышения надежности способа с помощью блока регистрации изображений оптически определяется, переместилась ли кабина, т.е. прошла определенный участок в шахте. Только в этом случае данные ускорения привлекаются для определения текущего положения. Этим можно исключить помехи в результате вибраций, которые возникают, например, при посадке в кабину и высадки из нее и регистрируются датчиком ускорений.
Предпочтительно изображения снимаются только тогда, когда датчик ускорения измеряет данные ускорения кабины. При этом вычислительный блок необязательно должен постоянно сравнивать изображения из блока регистрации изображений, а происходит сравнение лишь в случае обнаружения ускорения (и потому возможного движения) датчиком ускорения.
Предпочтительно данные ускорения снимаются с частотой 100 Гц.
Изображения снимаются предпочтительно с частотой 60 Гц.
Предпочтительно снимки изображений делаются только тогда, когда данные ускорения лежат выше заданного или задаваемого порогового значения.
Это должно гарантировать, что ускорения, изменяемые датчиком ускорения, например, во время посадки в кабину и высадки из нее, не вызовут срабатывания блока регистрации изображений. Таким образом, можно использовать относительно недорогой и простой вычислительный блок, т.е. он не должен непрерывно обрабатывать и, при необходимости, хранить снимки изображений.
Предпочтительно данные ускорения, лежащие выше заданного или задаваемого второго порогового значения, отклоняются вычислительным блоком.
Также в основе этого предпочтительного варианта лежит идея ограничить до минимума объем вычислений вычислительного блока. Кроме того, не должны учитываться, тем самым, данные ускорения, лежащие выше второго порогового значения и вызываемые, согласно изобретению, помехами. Например, могут быть исключены ускорения более 1 g, возникающие при экстренном торможении кабины, т.к. в этом случае устройство экстренного торможения гарантирует остановку кабины.
Особенно предпочтительно новая калибровка текущего положения осуществляется тогда, когда отклонение между основанным на изображениях и вычисленным текущими положениями лежит выше заданного или задаваемого порогового значения. При этом основанное на изображениях текущее положение, выявленное непосредственно и однозначно, используется вместо вычисленного текущего положения (которое выявлено косвенно посредством данных ускорения).
В качестве альтернативы этому новая калибровка текущего положения с основанным на изображениях текущим положением может осуществляться во второй интервал времени. В этой альтернативе при каждом сравнении снятых изображений с калибровочными данными, при котором определяется основанное на изображениях текущее положение, текущее положение заново калибруется. Эта новая калибровка происходит, следовательно, непрерывно во вторые интервалы времени.
Таким образом, основанное на изображениях текущее положение определяется предпочтительно с изображениями, снятыми в заданный или задаваемый второй интервал времени, причем второй интервал времени больше или равен первому интервалу времени. Также в этом случае достигается разгрузка вычислительного блока. При этом не все снятые блоком регистрации изображений изображения используются для определения основанного на изображениях текущего положения, и, тем самым, снижаются затраты на вычисления вычислительного блока. Второй интервал времени лежит особенно предпочтительно в диапазоне 500-100 мс, что соответствует частоте 2-10 Гц.
Предпочтительно картированные изображения во время учебного рейса кабины хранятся в базе данных. Эта база данных связана с вычислительным блоком. Адрес ячейки памяти для картированного изображения в базе данных определен в зависимости от положения вдоль шахты. Вычислительный блок использует вычисленное текущее положение, чтобы ограничить поиск картированного изображения в базе данных.
При этом при сравнении снятых изображений с картированными изображениями для определения основанного на изображениях текущего положения соответствующее снятому изображению картированное изображение можно быстрее найти в базе данных. Возникающее из этого преимущество является даже двойным, т.к. картированное изображение можно не только быстрее найти, но и дополнительно уменьшить затраты на вычисления вычислительного блока.
Кроме того, изобретение относится к системе для определения положения движущейся в шахте лифта кабины лифта лифтовой установки. Такая система может эксплуатироваться предпочтительно описанным выше способом. Поэтому очевидно, что упомянутые выше в отношении способа преимущества соответственно относятся и к системе.
Кабина оборудована датчиком ускорения. Система включает в себя далее вычислительный блок, который регистрирует данные ускорения от датчика ускорения и вычисляет текущее положение и/или скорость кабины исходя из начального положения и зарегистрированных данных ускорения.
Согласно изобретению, система включает в себя далее блок регистрации изображений, который делает снимки изображений шахты лифта и передает их на вычислительный блок. Кроме того, вычислительный блок сравнивает снятые изображения с калибровочными изображениями шахты, чтобы определить основанное на изображениях текущее положение и осуществить новую калибровку текущего положения с использованием основанного на изображениях текущего положения.
Предпочтительно блок регистрации изображений делает снимки изображений шахты в заданный или задаваемый первый интервал времени и передает их на вычислительный блок. Далее вычислительный блок сравнивает между собой два последовательно снятых изображения, чтобы определить пространственный сдвиг обоих изображений и привлечь данные ускорения для определения положения и скорости кабины только тогда, когда пространственный сдвиг определяется вычислительным блоком.
Предпочтительно вычислительный блок управляет блоком регистрации изображений для съемки изображений и/или регулирует его, когда регистрируются данные ускорения кабины.
Предпочтительно вычислительный блок регистрирует данные ускорения только тогда, когда они лежат выше заданного или задаваемого порогового значения. Далее предпочтительно вычислительный блок отклоняет данные ускорения, лежащие выше заданного или задаваемого второго порогового значения.
Далее предпочтительно вычислительный блок заново калибрует текущее вычисленное положение с текущим, основанным на изображениях положением, когда отклонение между текущим, основанным на изображениях и текущим положениями лежит выше заданного или задаваемого порогового значения. В качестве альтернативы этому вычислительный блок заново калибрует текущее положение во второй интервал времени с основанным на изображениях текущим положением.
Далее предпочтительно вычислительный блок определяет основанное на изображениях текущее положение со снятыми в заданный или задаваемый второй интервал времени изображениями, причем второй интервал времени больше или равен первому интервалу времени.
Предпочтительно предусмотрена база данных для хранения картированных изображений, полученных во время учебного рейса кабины лифта. При этом адрес ячейки памяти для картированного изображения в базе данных определен в зависимости от положения вдоль шахты. Далее вычислительный блок ограничивает поиск картированного изображения в базе данных с использованием вычисленного актуального положения.
Изобретение касается далее лифтовой установки, которая оборудована описанной выше системой для определения положения кабины лифта.
Преимущества следуют из предшествующего описания способа и системы.
Изобретение поясняется ниже на примере его осуществления со ссылкой на чертежи, на которых изображают:
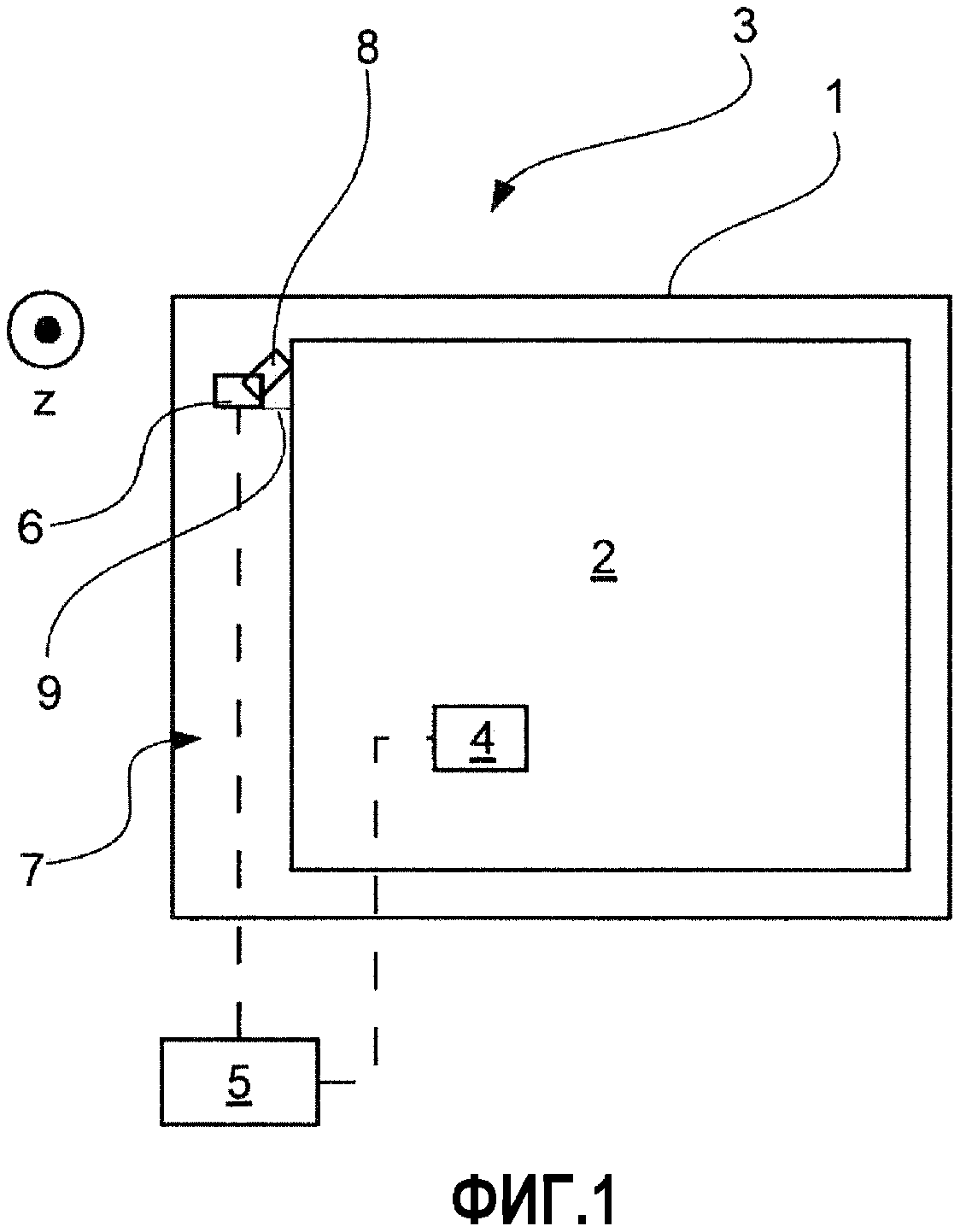
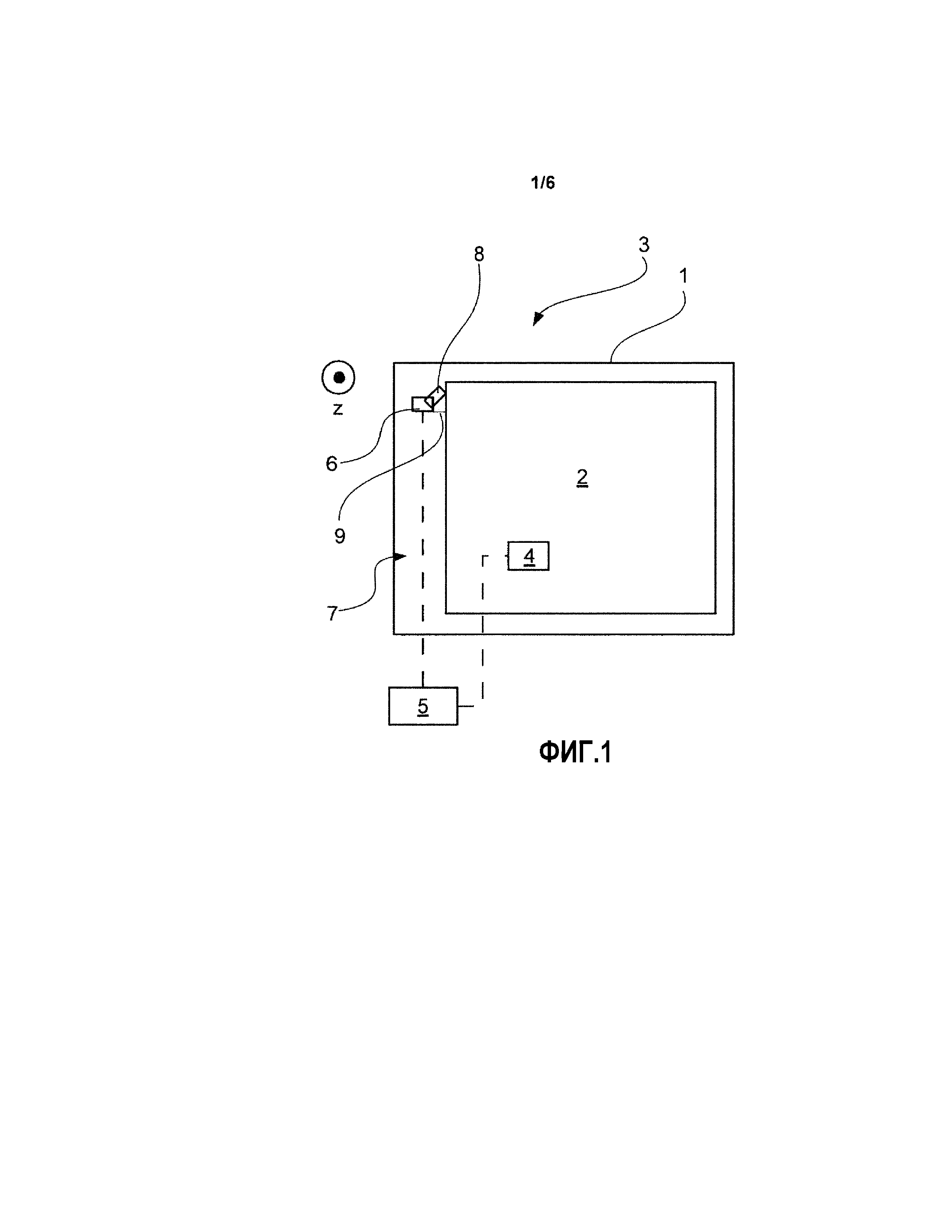
фиг. 1 - схематичный разрез выполнения лифтовой установки с системой для определения положения;
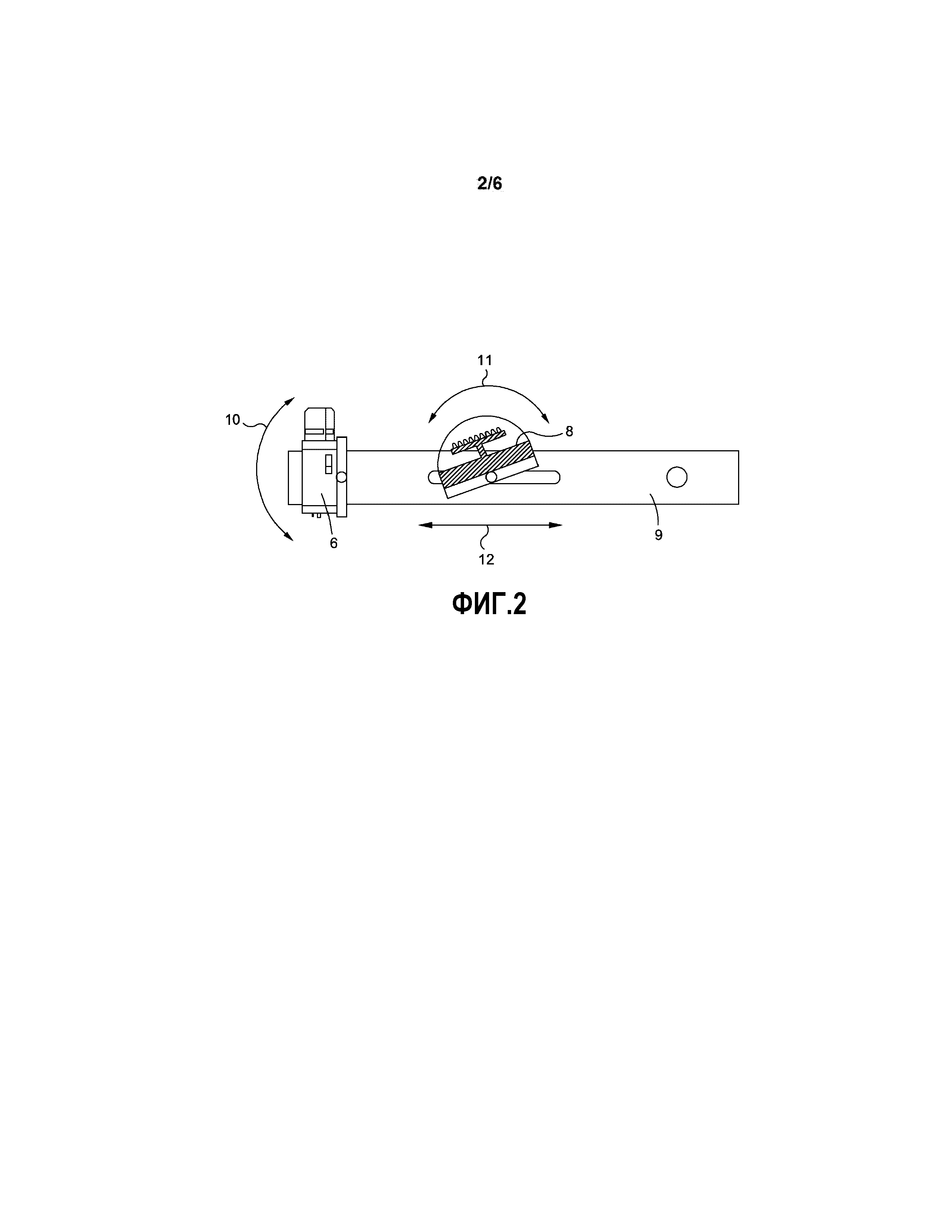
фиг. 2 - подробный вид выполнения консоли из фиг. 1;
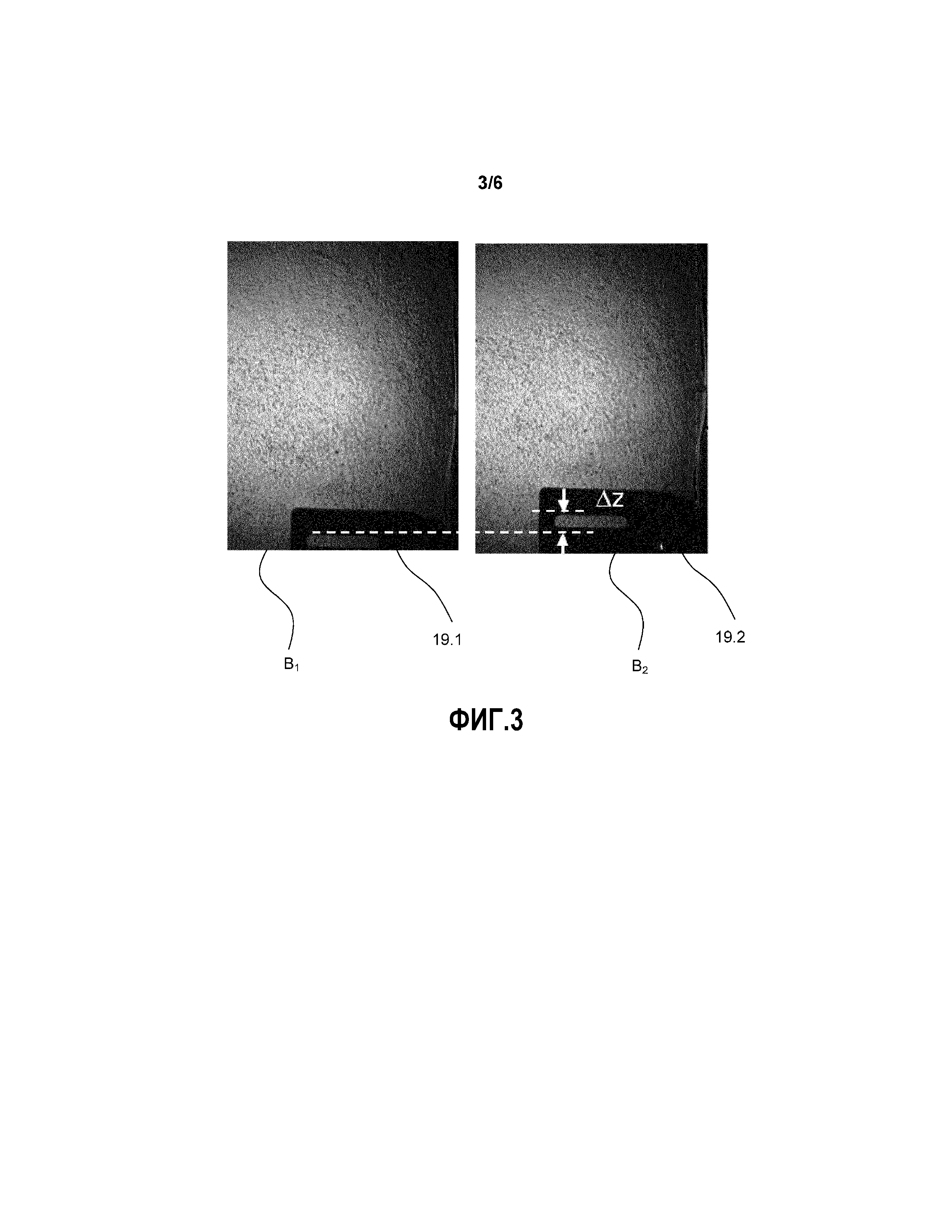
фиг. 3 - сравнение двух последовательно снятых изображений в первый задаваемый интервал времени;
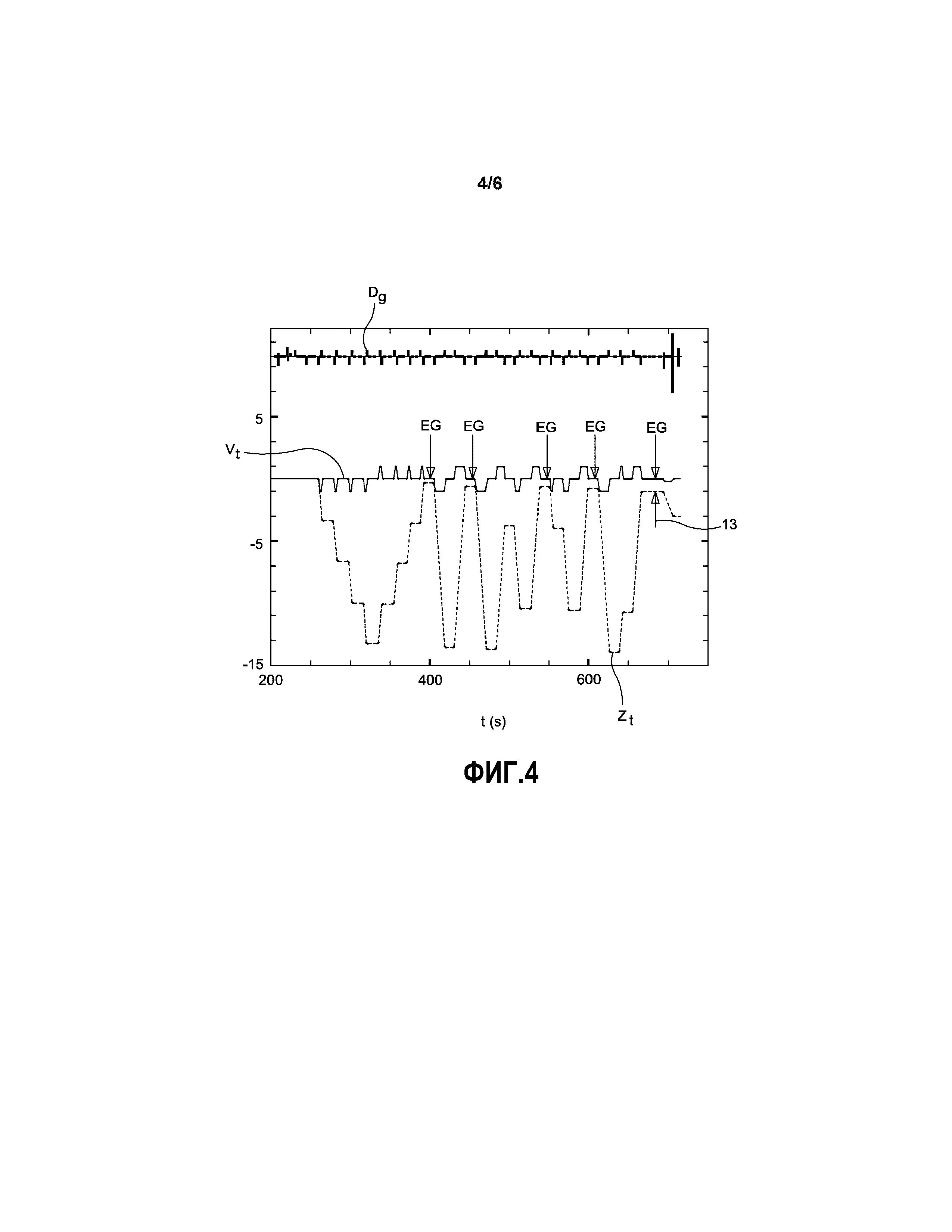
фиг. 4 - графическое изображение данных сравнения и вычисленных на его основе положения и скорости кабины;
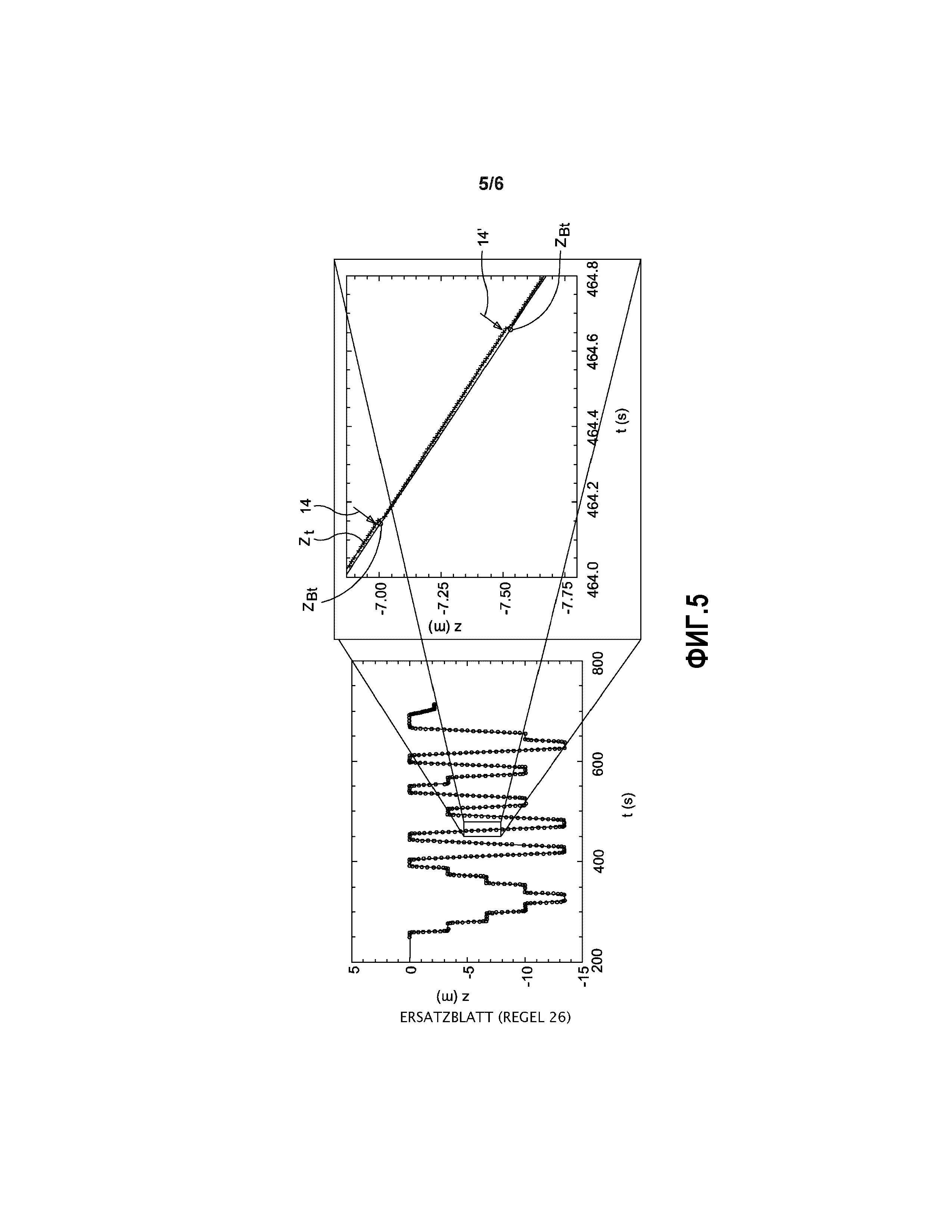
фиг. 5 - графическое изображение вычисленного и основанного на изображениях положений;
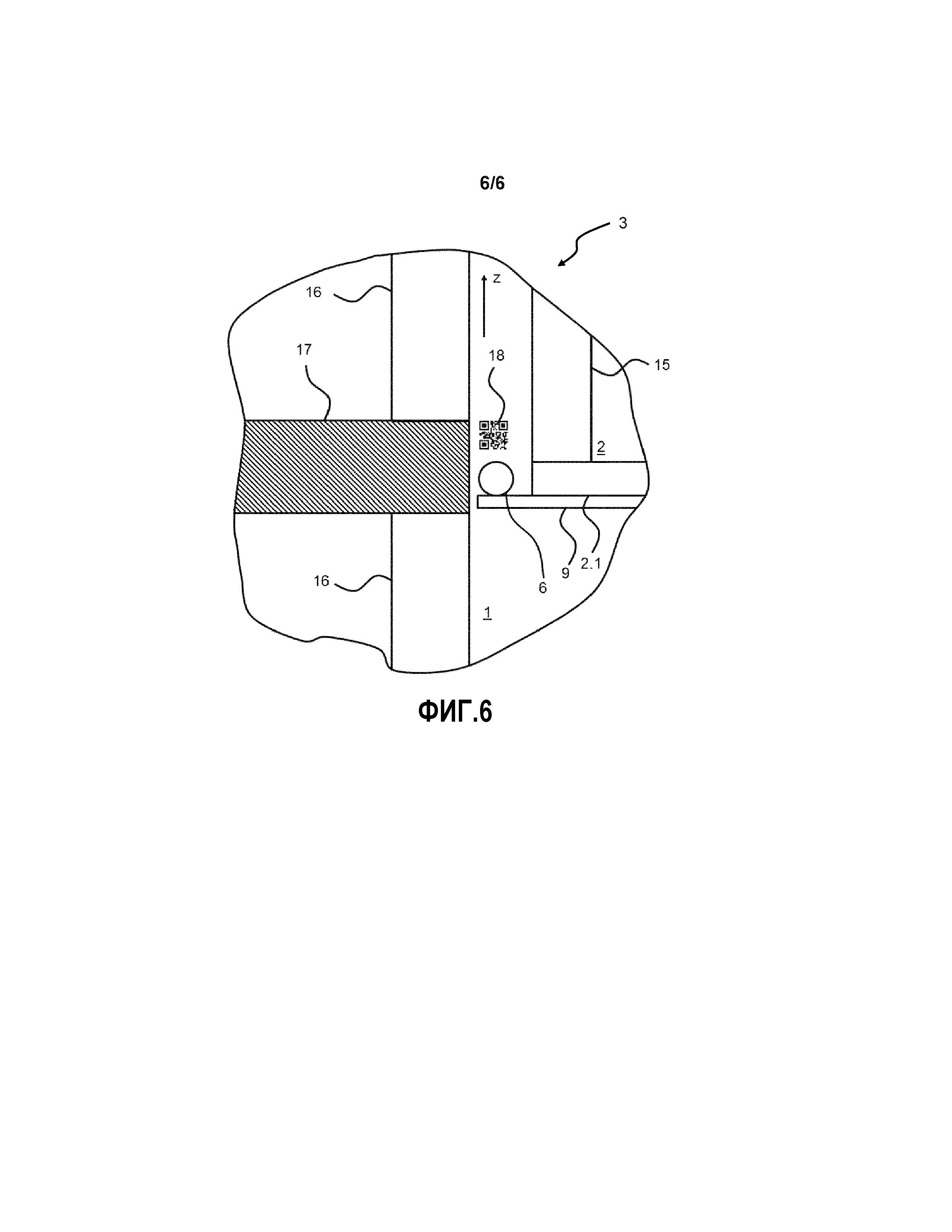
фиг. 6 - QR-код, служащий для указания положения этажа.
На фиг. 1 изображена лифтовая установка 3, оборудованная системой 7 для определения положения. Лифтовая установка 3 включает в себя кабину 2, движущуюся в шахте 1 вдоль оси Z. Не показаны различные несущие и тяговые средства, которые находят применение для поддержания и движения кабины 2.
Кабина 2 снабжена датчиком 4 ускорения, соединенным с вычислительным блоком 5. Соединение между датчиком 4 ускорения и вычислительным блоком 5 схематично обозначено штриховой линией. При этом речь может идти о непосредственном соединении кабелем, например, с системой шин или о бескабельном соединении. В примере на фиг. 1 вычислительный блок 5 расположен на кабине 2. Однако вычислительный блок 5 необязательно должен быть расположен в шахте 1.
Датчик 4 ускорения измеряет возникающие в кабине 2 ускорения Dg и передает их на вычислительный блок 5. Особенно важны возникающие в направлении Z ускорения, которые могут представлять собой движение кабины 2 и вследствие этого должны надежно регистрироваться.
Кабина оборудована далее камерой 6, здесь в качестве примера CCD-камерой, которая размещена на кабине 2 посредством консоли 9. Консоль 9 обеспечивает регулирование ориентации камеры 6 и дооборудование уже имеющихся лифтовых установок.
Камера 6 также соединена с вычислительным блоком 5, как это схематично обозначено штриховой линией. Для освещения шахты 1 на консоли 9 расположен прожектор 8, например LED-прожектор. Таким образом, камера 6 может снимать достаточно освещенный участок шахты 1, что повышает качество снимков изображений и, следовательно, повышает надежность сравнения изображений.
На фиг. 2 изображен пример выполнения консоли 9. Для регулирования камера 6 может поворачиваться вокруг оси поворота, как это обозначено двойной стрелкой 10. Кроме того, прожектор 8 может поворачиваться вокруг оси поворота и перемещаться вдоль консоли 9, как это обозначено соответствующими двойными стрелками 11 и 12.
Камера 6 работает с частотой съемки 60 Гц. Сравнив два последовательно снятых изображения В1 и В2, можно определить, произошел ли их сдвиг Δz. В частности, на фиг. 3 сдвиг Δz изображен с помощью крепежного элемента 19.1, 19.2. Крепежный элемент 19.1 показан в нижней части первого изображения В1. На втором изображении В2 крепежный элемент 19.2 оказывается выше на сдвиг Δz. Установленный на изображениях В1, В2 сдвиг Δz соответствует, следовательно, движению кабины 2 вниз на Δz. Это сравнение происходит преимущественно на основе сравнения уровней серого изображений В1, В2. Следовательно, можно определить, переместилась ли кабина в направлении z. Эти оптически полученные данные используются для того, чтобы дополнить данные от датчика 4 ускорения.
С помощью датчика 4 ускорения можно определить, испытала ли кабина 2 ускорение Dg. Из этого можно вывести положение zt кабины 2. Однако движение с постоянной скоростью не регистрируется датчиком 4 ускорения, т.к. в этом случае измеренное ускорение кабины составляет 0. Однако за счет оптического обнаружения движения можно различить остановку и движение кабины 2. Вследствие этого (основанное на инерции) определение положения на основе данных от датчика 4 ускорения используется только тогда, когда оптически обнаруживается движение кабины 2.
На фиг. 4 представлены данные, зарегистрированные датчиком 4 ускорения. Dg обозначает характеристику измеренного датчиком 4 ускорения кабины 2. При остановке кабины измеренное датчиком 4 ускорение составляет 9,81 м/с2. За счет интегрирования ускорения Dg можно, тем самым, вычислить скорость vt и основанное на инерции положение zt, также представленные на фиг. 4 соответственно в м/с и м. В представленном на фиг. 4 случае кабина 2, обозначенная стрелками EG, регулярно останавливалась в месте остановки z = 0. Однако очевидно, что вычисленное по данным ускорения Dg, основанное на инерции положение zt после первого рейса никогда не имеет значения 0 м, а всегда отклоняется от этого значения. При времени около 670 с это называемое «дрифтом» отклонение составляет примерно 1 м, как это обозначено стрелкой 13.
Для определения текущего положения кабины изображения, снятые с интервалом времени 100-200 с, сравниваются с картированными изображениями из базы данных. Картированные изображения из базы данных сняты во время учебного рейса, например при пуске лифтовой установки 3 в эксплуатацию, и однозначно присвоены положению кабины 2 в шахте 1. Таким образом, можно определить положение zBt кабины 2 с помощью непосредственного, основанного на изображениях измерения, а не как обычно до сих пор косвенными методами.
Особенно предпочтительно при определении основанного на изображениях текущего положения zBt, при котором снятое изображение сравнивается с картированными изображениями, вычислительный блок просматривает базу данных в поисках совпадающего картированного изображения с помощью вычисленного текущего положения zt. При этом поиск в базе данных можно сильно ограничить, т.к. адреса ячеек памяти для картированных изображений образованы в зависимости от положения вдоль шахты 1.
В частности, за счет термически обусловленного расширения или усадки или за счет обусловленной силой тяжести осадки здания уменьшается точность косвенных методов, например инкрементного диска или кодировки магнитной ленты. Система 7 не затронута таким уменьшением точности, т.к. оптически выявленное, основанное на изображениях положение zBt не зависит от названных выше мешающих факторов.
Текущее, основанное на изображениях положение zBt, которое, как описано выше, было оптически выявлено, используется далее для корректировки положения zt, вычисленного посредством данных ускорения от датчика 4 ускорения.
При этом оптически выявленное, основанное на изображениях положение zBt сравнивается с вычисленным посредством данных ускорения от датчика 4 ускорения, основанным на инерции положением zt, которое подвержено «дрифту». Если отклонение между оптически выявленным, основанным на изображениях положением zBt и вычисленным, основанным на инерции положением zt слишком велико, то происходит новая калибровка положения. При новой калибровке оптически выявленное, основанное на изображениях положение zBt используется в качестве текущего положения. Исходя из этого затем привлекаются данные ускорения от датчика 4 ускорения, как описано выше, чтобы дальше определить положение zt кабины 2. Таким образом, можно отказаться от использования других систем для определения положения, например инкрементного диска или кодировки магнитной ленты. К тому же такая новая калибровка возможна в любое время, а не как обычно до сих пор только в самом верхнем или самом нижнем положении остановки кабины 2.
Как уже сказано, в качестве альтернативы новая калибровка текущего положения zt может осуществляться в интервалы времени t2 100-200 мс при каждом сравнении снятого изображения с картированными изображениями, при котором определяется основанное на изображениях текущее положение.
На фиг. 5 показан процесс такой новой калибровки, причем правая диаграмма изображает увеличение окруженной рамкой области левой диаграммы. При этом видно, что вычисленное, основанное на инерции положение zt по времени отличается от оптически выявленного, основанного на изображениях положения zBt. Если отклонение лежит выше порогового значения, то вычисленное, основанное на инерции положение zt заново калибруется за счет того, что оптически выявленное, основанное на изображениях положение zBt используется в качестве текущего положения инерциальной системы позиционирования, как обозначено стрелкой 14. Определение положения осуществляется тогда далее, как описано выше, пока отклонение между оптически выявленным, основанным на изображениях положением zBt и вычисленным, основанным на инерции положением zt снова не достигнет порогового значения и не произойдет новой калибровки, как обозначено стрелкой 14’.
На фиг. 6 схематично показан фрагмент лифтовой установки 3 около этажа 17, причем на фиг. 6 представлена ситуация, в которой кабина 2 в шахте 1 в вертикальном рейсе в направлении z собирается прибыть на этаж 17. Шахта 1 закрывается от этажа 17 дверью 16. На обращенной к двери 16 шахты стороне кабины 2 предусмотрена дверь 15 кабины. Этаж 17 маркирован этажной меткой 18, выполненной здесь в виде QR-кода, которая находится в зоне обзора камеры 6 и регистрируется ею. Камера 6 установлена на консоли 9, которая закреплена, например, на полу 2.1 кабины 2. Этажная метка 18 характерна преимущественно для каждого этажа 17, так что благодаря регистрируемым камерой 9 этажным меткам 18 возможно автоматическое обнаружение положений всех этажей 17 вдоль шахты 1.
Обнаруживаемые в виде изображений камерой 6 этажные метки 18 снимаются также во время учебной поездки в качестве картированных изображений КВ и соответственно сохраняются в базе данных. Снятые в зоне этажных меток 18 изображения особенно просто присваиваются картированному изображению КВ, так что калибровка вычисленного текущего положения zt в зоне этажных меток 18 особенно надежна. При ограниченном по времени выходе из строя системы 7 этажная метка 18 может служить также в качестве начальной точки или начального положения z0 для нового расчета текущего положения zt.
Проведенные заявителем испытания показали, что назначение размеров QR-кода 18 важно для лишенного погрешностей обнаружения положений на этажах. Преимущественно QR-код 18 имеет размер 3×3 см, причем оптимальный размерный диапазон составляет 4 × 4 – 6 × 6 см. При еще бóльших QR-кодах обнаружение, правда, также обнаруживается, однако только при соответственно большой зоне обзора камеры 6.
Очевидно, что существующие лифтовые установки 3 могут быть легко дооборудованы такой системой 7 для определения положения кабины 2. При этом на кабине должны быть закреплены и соединены с вычислительным блоком 5 только камера 6 и, при необходимости, прожектор 8. Предпочтительно, если вычислительный блок 5 представляет собой уже существующий блок регулирования и/или управления лифтовой установкой 3, который совершенствуется за счет обновления программного обеспечения или добавления аппаратного модуля. Опционально этажные метки 18 могут располагаться в шахте 1 около этажей 17. Затем осуществляется учебный рейс, во время которого снимаются картированные изображения шахты 1 и присваиваются положению кабины 2.
Такая система 7 обеспечивает очень точное определение положения с погрешностями менее 0,5 мм при скоростях кабины до 5 м/с.
Подъемник с кабиной, блок направляющих шкивов для подъемника и способ размещения в подъемнике датчика для взвешивания груза
Формирование безопасного пространства для временного пользования
Способ и устройство для обслуживания лифта или эскалатора
Способ изготовления обладающего несущей способностью стального конструктивного элемента клинчеванием металлических деталей, инструмент для клинчевания и стальной конструктивный элемент
Способ и устройство для уменьшения потребления энергии лифтовой установкой
Способ и инструмент для приклепывания толстых металлических листов, а также применение клепального инструмента, или клепального аппарата, или клепального прибора
Контроль состояния лифта
Способ контроля тормозного механизма подъемной установки, способ пуска подъемной установки и устройство для осуществления пуска
Дверная система лифтовой установки и лифтовая установка
Способ эксплуатации системы безопасности со временными пользователями
Удаленный мониторинг и осмотр лифта

