Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ СОСТОЯНИЕМ ЗАРЯДА АККУМУЛЯТОРНОЙ БАТАРЕИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к устройству управления состоянием заряда аккумуляторной батареи для транспортного средства с гибридным приводом.
Уровень техники
Транспортные средства, включающие в себя двигатель внутреннего сгорания, электродвигатель и аккумуляторную батарею, присоединенную к электродвигателю, известны. Такие транспортные средства с гибридным приводом сконфигурированы так, чтобы аккумуляторная батарея могла заряжаться электрической энергией, вырабатываемой выходной мощностью двигателя внутреннего сгорания, и чтобы электрическая энергия, поставляемая из аккумуляторной батареи, использовалась для возбуждения электродвигателя. Некоторые транспортные средства с гибридным приводом сконфигурированы так, чтобы внешний источник питания мог использоваться для зарядки аккумуляторной батареи (например, публикация заявки на выдачу патента Японии № 9-163506 (JP 9-163506 A), публикация заявки на выдачу патента Японии № 8-154307 (JP 8-154307 A)).
Что касается тех транспортных средств с гибридным приводом (например, подключаемых к бытовой сети транспортных средств с гибридным приводом), которые могут использовать внешний источник питания для зарядки аккумуляторной батареи, идеально потреблять всю электроэнергию, заряженную в аккумуляторную батарею, перед тем, как следующая зарядка выполняется от внешнего источника питания. Посредством потребления всей заряженной электроэнергии, время работы двигателя внутреннего сгорания может быть минимизировано. Как результат, может сдерживаться выброс углекислого газа, относящегося к работе двигателя внутреннего сгорания.
В транспортном средстве с гибридным приводом, раскрытом в JP 9-163506 A, целевое значение состояния заряда аккумуляторной батареи устанавливается на основании маршрута движения в пункт назначения в каждой точке на маршруте движения. Когда транспортное средство передвигается, целевое значение сравнивается с фактическим значением заряда аккумуляторной батареи в текущий момент времени в каждой точке. В результате сравнения, когда фактическое значение заряда аккумуляторной батареи выше целевого значения, увеличивается коэффициент крутящего момента, вырабатываемого электродвигателем. Как результат, используется большее количество электроэнергии аккумуляторной батареи. Когда фактическое состояние заряда аккумуляторной батареи ниже целевого значения, увеличивается коэффициент крутящего момента, вырабатываемого двигателем внутреннего сгорания. Как результат, используется меньшее количество электроэнергии аккумуляторной батареи. Согласно JP 9-163506 A, выполнение такого управления дает возможность настраивать состояние заряда аккумуляторной на целевое значение, например, практически на ноль, к моменту времени, когда транспортное средство с гибридным приводом прибывает в пункт назначения, и, тем самым, может быть сокращено время работы двигателя внутреннего сгорания.
Сущность изобретения
Например, бывают случаи, в которых водитель не присоединяет транспортное средство с гибридным приводом к внешнему источнику питания, даже когда транспортное средство с гибридным приводом прибывает на зарядную станцию, такую как место жительства. В тех случаях, когда транспортное средство с гибридным приводом не присоединяется к внешнему источнику питания на зарядной станции, транспортное средство с гибридным приводом вынуждается начинать следующую поездку в состоянии, где состояние заряда аккумуляторной батареи является практически нулевым, если транспортное средство с гибридным приводом управляется так, чтобы состояние заряда аккумуляторной батареи становилось практически нулевым в момент времени, когда транспортное средство с гибридным приводом прибывает в пункт назначения. Когда передвижение транспортного средства с гибридным приводом выполняется в состоянии, где состояние заряда аккумуляторной батареи является практически нулевым, становится необходимым ограничивать выходную мощность электродвигателя. Это затрудняет получение достаточной отдачи расходуемой на движение мощности транспортного средства.
Настоящее изобретение предусматривает устройство управления, которое ослабляет ухудшение отдачи расходуемой на движение мощности транспортного средства, тем временем, минимизируя время работы двигателя внутреннего сгорания.
Аспект настоящего изобретения относится к устройству управления состоянием заряда аккумуляторной батареи для транспортного средства с гибридным приводом, причем транспортное средство с гибридным приводом включает в себя двигатель внутреннего сгорания, электродвигатель и аккумуляторную батарею, присоединенную к электродвигателю, транспортное средство с гибридным приводом выполнено с возможностью заряжать аккумуляторную батарею электроэнергией, вырабатываемой выходной мощностью двигателя внутреннего сгорания, транспортное средство с гибридным приводом выполнено с возможностью возбуждать электродвигатель электроэнергией, подаваемой из аккумуляторной батареи, транспортное средство с гибридным приводом выполнено с возможностью заряжать аккумуляторную батарею от внешнего источника питания, устройство управления, содержащее электронный блок управления, электронный блок управления выполнен с возможностью: i) устанавливать целевую степень зарядки, целевая степень зарядки является целевым значением состояния заряда аккумуляторной батареи, когда транспортное средство с гибридным приводом прибывает на предписанную зарядную станцию; ii) когда транспортное средство с гибридным приводом передвигается за пределами зарядной станции, управлять выходной мощностью двигателя внутреннего сгорания и электродвигателя, так чтобы состояние заряда в момент времени, когда транспортное средство с гибридным приводом прибывает на зарядную станцию, имело значение целевой степени зарядки; и iii) оценивать вероятность зарядки и устанавливать целевую степень зарядки ниже, когда оцененная вероятность зарядки высока, чем когда оцененная вероятность зарядки низка, вероятность зарядки является вероятностью, что аккумуляторная батарея заряжается от внешнего источника питания на зарядной станции, когда транспортное средство с гибридным приводом прибывает на зарядную станцию.
В вышеприведенном аспекте, вероятность зарядки может оцениваться на основании предыстории зарядки, которая является предысторией зарядки аккумуляторной батареи от внешнего источника питания, когда транспортное средство с гибридным приводом останавливалось на зарядной станции в прошлом.
В вышеприведенном аспекте, предыстория зарядки может включать в себя частоту внешней зарядки, которая является частотой зарядки аккумуляторной батареи от внешнего источника питания, когда транспортное средство с гибридным приводом останавливалось на зарядной станции в прошлом. Электронный блок управления может быть выполнен с возможностью устанавливать целевую степень зарядки ниже, когда частота внешней зарядки высока, чем когда частота внешней зарядки низка.
В вышеприведенном аспекте, частота внешней зарядки может быть частотой зарядки аккумуляторной батареи от внешнего источника питания, в то время как транспортное средство с гибридным приводом останавливалось на станции, когда состояние заряда в момент времени, когда транспортное средство с гибридным приводом прибывает на зарядную станцию, равно или меньше предопределенного значения.
В вышеприведенном аспекте, предыстория зарядки может включать в себя частоту внешней зарядки в каждом из множества состояний окружающей среды транспортного средства, когда транспортное средство с гибридным приводом останавливалось на зарядной станции в прошлом. Электронный блок управления может быть выполнен с возможностью: i) получать состояние окружающей среды транспортного средства, являющееся состоянием окружающей среды транспортного средства на настоящее время, или состояние окружающей среды транспортного средства, когда ожидается, что транспортное средство с гибридным приводом должно прибыть на зарядную станцию; и ii) устанавливать целевую степень зарядки ниже, когда полученное состояние окружающей среды транспортного средства является состоянием окружающей среды транспортного средства, в котором частота внешней зарядки высока, чем когда полученное состояние окружающей среды транспортного средства является состоянием окружающей среды транспортного средства, в котором частота внешней зарядки низка.
В вышеприведенном аспекте, состояния окружающей среды транспортного средства отличаются по меньшей мере одной из следующих категорий: (i) временным интервалом, (ii) днем недели, (iii) погодой, (iv) водителем, и (v) количеством занимающих места людей.
В вышеприведенном аспекте, вероятность зарядки оценивается на основании погоды в текущем местоположении или на зарядной станции, погода является погодой в текущий момент времени или погодой в момент времени, когда ожидается, что транспортное средство с гибридным приводом должно прибыть на зарядную станцию.
Настоящее изобретение ослабляет ухудшение отдачи расходуемой на движение мощности транспортного средства, тем временем, минимизируя время работы двигателя внутреннего сгорания.
Краткое описание чертежей
Признаки, преимущества, а также техническая и промышленная значимость примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые номера обозначают идентичные элементы, и на которых:
фиг. 1 – схематический вид транспортного средства с гибридным приводом согласно первому варианту осуществления;
фиг. 2 - структурная схема, схематически иллюстрирующая устройство управления, которое управляет транспортным средством с гибридным приводом;
фиг. 3 - зависимость между расстоянием до зарядной станции и SOC, и режимом работы;
фиг. 4 - зависимость, аналогичную зависимости с фиг. 3, с множеством зарядных станций, присутствующих вокруг транспортного средства;
фиг. 5 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления по управлению режимом движения, которая устанавливает режим движения;
фиг. 6 - зависимость между частотой внешней зарядки и целевым SOC;
фиг. 7 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления по управлению расчетом целевого SOC, которая рассчитывает целевое SOC на каждой зарядной станции;
фиг. 8 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления по управлению расчетом частоты внешней зарядки для расчета частоты внешней зарядки на определенной зарядной станции;
фиг. 9 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления по управлению расчетом частоты внешней зарядки, согласно модификации первого варианта осуществления.
фиг. 10 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления по управлению расчетом целевого SOC, которая рассчитывает целевое SOC на каждой зарядной станции;
фиг. 11 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления по управлению расчетом частоты внешней зарядки и поправочного значения для расчета частоты внешней зарядки на определенной зарядной станции и расчета поправочного значения;
фиг. 12 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления для управления расчетом целевого SOC, которая рассчитывает целевое SOC на зарядной станции;
фиг. 13 - фрагментарная блок-схема последовательности операций способа, иллюстрирующая процедуру управления для управления расчетом частоты внешней зарядки, которая рассчитывает частоту внешней зарядки на определенной зарядной станции;
фиг. 14 - фрагментарная блок-схема последовательности операций способа, иллюстрирующая процедуру управления для управления расчетом частоты внешней зарядки, которая рассчитывает частоту внешней зарядки на определенной зарядной станции;
фиг. 15 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления для управления расчетом целевого SOC, которая рассчитывает целевое SOC на зарядной станции; и
фиг. 16 - схематический вид транспортного средства с гибридным приводом согласно четвертому варианту осуществления.
Подробное описание вариантов осуществления изобретения
В дальнейшем, варианты осуществления настоящего изобретения будут подробно описаны со ссылкой на чертежи. В нижеследующем описании, одинаковые составляющие элементы обозначены идентичными номерами ссылок.
Первый вариант осуществления
Конфигурация транспортного средства
Фиг. 1 схематически иллюстрирует транспортное средство 1 с гибридным приводом, оборудованное устройством управления согласно первому варианту осуществления. Как проиллюстрировано на фиг. 1, транспортное средство 1 включает в себя двигатель 10 внутреннего сгорания, первый двигатель-генератор 12, второй двигатель-генератор 14 и устройство 16 распределения мощности. В дополнение, транспортное средство 1 включает в себя блок 18 управления электропитанием (PCU), электрически присоединенный к первому двигатель-генератору 12 и второму двигатель-генератору 14, аккумуляторной батарее 20, электрически присоединенную к PCU 18, и бортовой разъем 22 транспортного средства.
Двигатель 10 внутреннего сгорания является двигателем, который сжигает топливо, такое как бензин или дизельное топливо, внутри двигателя и преобразует тепловую энергию газообразных продуктов сгорания в механическую энергию. Выходная мощность двигателя 10 внутреннего сгорания управляется посредством настройки количества топлива и воздуха, подаваемых в двигатель 10 внутреннего сгорания. Двигатель 10 внутреннего сгорания имеет выходной вал (коленчатый вал), механически связанный с устройством 16 распределения мощности. Расходуемая на движение мощность, вырабатываемая двигателем 10 внутреннего сгорания, вводится в устройство 16 распределения мощности.
Первый двигатель-генератор 12 имеет входной и выходной валы, механически связанные с устройством 16 распределения мощности, и электрически присоединен к PCU 18. Когда PCU 18 подает электроэнергию в первый двигатель-генератор 12, первый двигатель-генератор 12 возбуждается электроэнергией и выдает расходуемую на движение мощность в устройство 16 распределения мощности. Поэтому, в этом случае, первый двигатель-генератор 12 действует в качестве электродвигателя.
Когда расходуемая на движение мощность подается из устройства 16 распределения мощности в первый двигатель-генератор 12, первый двигатель-генератор 12 приводится в движение расходуемой на движение мощностью и вырабатывает электроэнергию. Вырабатываемая электроэнергия подается в аккумуляторную батарею 20 через PCU 18, и выполняется зарядка аккумуляторной батареи 20. Поэтому, в этом случае, первый двигатель-генератор 12 действует в качестве электрогенератора. Первый двигатель-генератор 12 может быть электрогенератором, который не действует в качестве электродвигателя.
Второй двигатель-генератор 14 имеет входной и выходной валы, механически связанные с устройством 16 распределения мощности, и электрически присоединен к PCU 18. Когда PCU 18 подает электроэнергию на второй двигатель-генератор 14, второй двигатель-генератор 14 возбуждается электроэнергией и выдает расходуемую на движение мощность в устройство 16 распределения мощности. Поэтому, в этом случае, второй двигатель-генератор 14 действует в качестве электродвигателя.
Когда расходуемая на движение мощность подается из устройства 16 распределения мощности во второй двигатель-генератор 14, второй двигатель-генератор 14 приводится в движение расходуемой на движение мощностью и вырабатывает электроэнергию. Вырабатываемая электроэнергия подается в аккумуляторную батарею 20 через PCU 18, и выполняется зарядка аккумуляторной батареи 20. Поэтому, в этом случае, второй двигатель-генератор 14 действует в качестве электрогенератора. Второй двигатель-генератор 14 может быть электродвигателем, который не действует в качестве двигателя-генератора.
Устройство 16 распределения мощности механически связано с двигателем 10 внутреннего сгорания, первым двигатель-генератором 12 и вторым двигатель-генератором 14. В дополнение, устройство 16 распределения мощности соединено с ведущим валом 32. Ведущий вал 31 соединен с колесами через дифференциальную передачу 34. В частности, в настоящем варианте осуществления, устройство 16 распределения мощности, включает в себя планетарный зубчатый механизм. Например, в планетарном зубчатом механизме, солнечная шестерня соединена с входным и выходным валами первого двигатель-генератора 12, планетарная шестерня соединена с выходным валом двигателя 10 внутреннего сгорания, а коронная шестерня соединена с входным и выходным валами второго двигатель-генератора 14.
Устройство 16 распределения мощности сконфигурировано так, чтобы расходуемая на движение мощность, подаваемая в устройство 16 распределения мощности из любого одного из двигателя 10 внутреннего сгорания, первого двигатель-генератора 12, второго двигатель-генератора 14 и ведущих валов 32, которые соединены с устройством 16 распределения мощности, могла выдаваться по меньшей мере на один из этих составляющих элементов, которые соединены с устройством 16 распределения мощности. Поэтому, например, когда расходуемая на движение мощность подается в устройство 16 распределения мощности из двигателя 10 внутреннего сгорания, расходуемая на движение мощность выдается по меньшей мере на один из первого двигатель-генератора 12, второго двигатель-генератора 14 и ведущих валов 32. Подобным образом, когда расходуемая на движение мощность подается в устройство 16 распределения мощности из первого двигатель-генератора 12, расходуемая на движение мощность выдается по меньшей мере на один из двигателя 10 внутреннего сгорания, второго двигатель-генератора 14 и ведущих валов 32. В дополнение, когда расходуемая на движение мощность подается в устройство 16 распределения мощности из второго двигатель-генератора 14, расходуемая на движение мощность выдается по меньшей мере на один из двигателя 10 внутреннего сгорания, первого двигатель-генератора 12 и ведущих валов 32.
PCU 18 включает в себя инвертер и преобразователь DCDC (из постоянного тока в постоянный ток). PCU 18 электрически присоединен к первому двигатель-генератору 12, второму двигатель-генератору 14 и аккумуляторной батарее 20. PCU 18 осуществляет управление первым двигатель-генератором 12, вторым двигатель-генератором 14 и аккумуляторной батареей 20. PCU 18 также выполняет преобразование электроэнергии, подаваемой на двигатель-генераторы 12, 14 из аккумуляторной батареи 20, и преобразование электроэнергии, подаваемой в аккумуляторную батарею 20 из двигатель-генераторов 12, 14.
Аккумуляторная батарея 20 электрически присоединена к PCU 18 и накапливает электроэнергию. Когда первый двигатель-генератор 12 или второй двигатель-генератор 14 приводятся в движение расходуемой на движение мощностью, подаваемой из устройства 16 распределения мощности, зарядка аккумуляторной батареи 20 выполняется через PCU 18. Когда первый двигатель-генератор 12 или второй двигатель-генератор 14 выдает расходуемую на движение мощность в устройство 16 распределения мощности, электроэнергия подается из аккумуляторной батареи 20 на первый двигатель-генератор 12 или второй двигатель-генератор 14 через PCU 18.
Бортовой разъем 22 транспортного средства является разъемом для соединения транспортного средства 1 с внешним источником 70 питания. Бортовой разъем 22 транспортного средства электрически присоединен к PCU 18. Бортовой разъем 22 транспортного средства выполнен с возможностью обеспечивать соединение с внешним разъемом 72, который электрически присоединен к внешнему источнику 70 питания. Когда бортовой разъем 72 транспортного средства присоединен к внешнему разъему 72, электроэнергия подается из внешнего источника 70 питания в аккумуляторную батарею 20 через бортовые разъемы 22 транспортного средства, внешний разъем 72 и PCU 18. Поэтому, транспортное средство 1 выполнено с возможностью давать аккумуляторной батарее 20 заряжаться от внешнего источника 70 питания.
В таким образом сконфигурированном транспортном средстве 1, электроэнергия может вырабатываться первым двигатель-генератора 12 или вторым двигатель-генератором 14, когда некоторая часть или вся расходуемая на движение мощность, которая получается двигателем 10 внутреннего сгорания, подается на первый двигатель-генератор 12 или второй двигатель-генератор 14. Электроэнергия, полученная посредство выработки электроэнергии, используется для зарядки аккумуляторной батареи 20 или подается на один из первого двигатель-генератора 12 и второго двигатель-генератора 14, который не вырабатывает электроэнергию, через PCU 18. Поэтому, транспортное средство 1 выполнено с возможностью давать аккумуляторной батарее 20 заряжаться электроэнергией, вырабатываемой выходной мощностью двигателя 10 внутреннего сгорания. Когда некоторая часть или вся расходуемая на движение мощность, получаемая двигателем 10 внутреннего сгорания, подается на ведущий вал 32, колеса 36 могут вращаться расходуемой на движение мощностью.
Транспортное средство выполнено с возможностью давать первому двигатель-генератору 12 или второму двигатель-генератору 12 возбуждаться электроэнергией, подаваемой из аккумуляторной батареи 20. Расходуемая на движение мощность, получаемая возбуждением первого двигатель-генератора 12 или второго двигатель-генератора 14, может подаваться на двигатель 10 внутреннего сгорания. Поэтому, двигатель 10 внутреннего сгорания в остановленном состоянии может запускаться такой расходуемой на движение мощностью. Когда расходуемая на движение мощность, получаемая возбуждением первого двигатель-генератора 12 или второго двигатель-генератора 14, подается на ведущий вал 32, колеса 36 могут вращаться расходуемой на движение мощностью.
Фиг. 2 представляет собой структурную схему, схематически иллюстрирующую устройство управления, которое управляет транспортным средством 1. Как проиллюстрировано на фиг. 2, устройство управления транспортного средства 1 включает в себя электронный блок 40 управления (ECU). В настоящем варианте осуществления, хотя предусмотрен один ECU 40, множество ECU может быть предусмотрено для каждой функции, ECU являются присоединенными друг к другу через шину, которая соответствует локальной сети контроллеров (CAN) или другим протоколам. ECU 40 присоединен к двигателю 10 внутреннего сгорания, первому двигатель-генератору 12, второму двигатель-генератору 14, устройству 16 распределения мощности, PCU 18 и аккумуляторной батарее 20 для управления составляющими элементами.
Устройство управления также включает в себя различные датчики и устройства связи. В примере, проиллюстрированном на фиг. 2, устройство управления включает в себя датчик 51 напряжения, приемник 52 GPS (глобальной системы определения местоположения), бортовое устройство 53 связи, камеру 54 контроля водителя, датчик 55 ключа, датчик 56 веса и датчик 57 дождя.
Датчик 51 напряжения присоединен к аккумуляторной батарее 20 и выполнен с возможностью выявлять напряжение между обоими электродами аккумуляторной батареи 20. Датчик 51 напряжения также присоединен к ECU 40, чтобы передавать выявленное напряжение в ECU 40. Приемник 52 GPS выполнен с возможностью принимать сигналы с трех или более спутников GPS и выявлять текущее местоположение (например, широту и долготу транспортного средства 1) транспортного средства 1. Датчик 52 GPS присоединен к ECU 40, чтобы передавать выявленную информацию о текущем местоположении в ECU 40.
Бортовое устройство 53 связи выполнено с возможностью выполнять беспроводную связь с базовой радиостанцией, которая покрывает дальность передачи, на которой расположено каждое транспортное средство 1. Поэтому, бортовое устройство 53 связи может отправлять данные на внешние серверы или принимать данные с внешних серверов. Поскольку бортовое устройство 53 связи присоединено к ECU 40, различная информация, в том числе, информация о заторах движения и информация о погоде в различных зонах, передается в ECU 40 через бортовое устройство 53 связи.
Камера 54 контроля водителя является устройством для фотографирования лица водителя. Камера 54 контроля водителя присоединена к ECU 40, чтобы передавать сфотографированное изображение лица в ECU 40. Датчик 55 ключа является датчиком, который собирает информацию о множестве ключей транспортного средства 1. Соответственно, транспортное средство 1, например, может различать, какой водитель, из числа множества водителей, которые владеют ключами, является текущим водителем. Датчик 55 ключа присоединен к ECU 40, и собранная информация о ключе передается в ECU 40.
Датчик 56 веса является датчиком, который выявляет вес погруженного объекта на каждом сиденье транспортного средства 1. Соответственно, транспортное средство 1 может определять, занято или нет человеком каждое сиденье. Датчик 56 веса присоединен к ECU 40, и датчик 56 веса передает вес выявленного погруженного объекта на каждом сиденье в ECU 40. Датчик 57 дождя является датчиком, который определяет, идет или нет дождь вокруг транспортного средства. Датчик 57 дождя присоединен к ECU 40. Выходной сигнал датчика 57 дождя передается в ECU 40.
В настоящем варианте осуществления, ECU 40 включает в себя блок 41 расчета SOC, блок 42 управления выходной мощностью и блок 43 установки целевого SOC.
Блок 41 расчета SOC выявляет состояние заряда (SOC) аккумуляторной батареи 20 в текущий момент времени. Поскольку напряжение на обоих электродах аккумуляторной батареи 20 изменяется в соответствии с SOC аккумуляторной батареи 20, блок 41 расчета SOC рассчитывает SOC на основании напряжения, выявленного датчиком 51 напряжения.
Устройство 42 управления выходной мощностью управляет каждой выходной мощностью двигателя 10 внутреннего сгорания, первого двигатель-генератора 12 и второго двигатель-генератора 14. Блок 43 установки целевого SOC устанавливает целевое SOC, которое является целевым значением SOC аккумуляторной батареи, когда транспортное средство прибывает на предписанную зарядную станцию. Специальные способ управления, выполняемый блоком 42 управления выходной мощностью, и способ установления целевого SOC, выполняемый блоком 43 установки SOC, будут описаны позже.
Режим работы
Далее будет приведено описание способа управления выходной мощностью двигателя 10 внутреннего сгорания и выходной мощностью двигатель-генераторов 12, 14, выполняемого блоком 42 управления выходной мощностью. Блок 42 управления выходной мощностью управляет двигателем 10 внутреннего сгорания и двигатель-генераторами 12, 14 в двух режимах работы: первом режиме работы и втором режиме работы.
Первый режим работы является режимом работы, в котором отношение (в дальнейшем указываемое ссылкой как «коэффициент использования двигателя») периода работы двигателя внутреннего сгорания (периода, в течение которого двигатель внутреннего сгорания вращается) к периоду работы транспортного средства 1 (периоду, в течение которого замок зажигания установлен в положение ВКЛ), относительно невелико. Второй режим работы является режимом работы, в котором коэффициент использования двигателя относительно велик.
Здесь, транспортное средство 1, главным образом, приводится в движение в трех состояниях вождения. В первом состоянии вождения, двигатель 10 внутреннего сгорания находится в остановленном состоянии, и расходуемая на движение мощность из одного или обоих, первого двигатель-генератора 12 и второго двигатель-генератора 14, выдается на ведущий вал 32. Поэтому, транспортное средство 1 приводится в движение только двигатель-генераторами 12, 14 в первом состоянии вождения. В первом состоянии вождения, зарядка аккумуляторной батареи 20 не выполняется, и электроэнергия подается из аккумуляторной батареи 20 на двигатель-генераторы 12, 14.
Во втором состоянии вождения, двигатель 10 внутреннего сгорания работает, и некоторая часть расходуемой на движение мощности, получаемой от двигателя 10 внутреннего сгорания, выдается на ведущий вал 32, а оставшаяся часть расходуемой на движение мощности выдается на первый двигатель-генератор 12 или второй двигатель-генератор 14. Двигатель-генератор 12 или 14, который принял расходуемую на движение мощность с двигателя 10 внутреннего сгорания, вырабатывает электроэнергию, которой заряжается аккумуляторная батарея 20. Во втором состоянии вождения, транспортное средство 1 в основном приводится в движение двигателем 10 внутреннего сгорания, а первый двигатель-генератор 12 или второй двигатель-генератор 14 вырабатывает электроэнергию. Во втором состоянии вождения, один из двигатель-генераторов 12, 14, который не вырабатывает электроэнергию, может выдавать расходуемую на движение мощность на ведущий вал 32.
В третьем состоянии вождения, двигатель 10 внутреннего сгорания находится в действии, и расходуемая на движение мощность, получаемая от двигателя 10 внутреннего сгорания, и расходуемая на движение мощность, получаемая от первого двигатель-генератора 12 или второго двигатель-генератора 14, выдается на ведущий вал 32. Поэтому, в третьем состоянии вождения, транспортное средство 1 приводится в движение двигателем 10 внутреннего сгорания и двигатель-генератором 12 или 14. В третьем состоянии вождения, зарядка аккумуляторной батареи 20 не выполняется, и электроэнергия подается из аккумуляторной батареи 20 на двигатель-генераторы 12, 14.
В первом режиме работы, период движения транспортного средства 1 в первом состоянии вождения длиннее периода во втором режиме работы. Как результат, коэффициент использования двигателя становится относительно небольшим. Поэтому, когда блок 42 управления выходной мощностью выполняет управление в первом режиме работы, SOC аккумуляторной батареи 20 постепенно убывает. Когда блок 42 управления выходной мощностью выполняет управление во втором режиме работы, SOC аккумуляторной батареи 20 в основном поддерживается постоянным или возрастает. Бывают случаи, где SOC аккумуляторной батареи 20 постепенно убывает даже под управлением во втором режиме работы. В таком случае, скорость убывания SOC во втором режиме по-прежнему ниже, чем скорость убывания SOC в первом режиме работы.
Более точно, первый режим работы является режимом (режимом транспортного средства с электрическим приводом, в дальнейшем будет указываться ссылкой как «режим EV»), например, в котором, в то время как работа двигателя 10 внутреннего сгорания остановлена, расходуемая на движение мощность из первого двигатель-генератора 12 или второго двигатель-генератора 14 выдается на ведущий вал 32 (то есть, режим вождения транспортного средства 1 только в первом состоянии вождения). Поэтому, в режиме EV, коэффициент использования двигателя является практически нулевым. В противоположность этому, второй режим работы является режимом (режимом транспортного средства с гибридным приводом, в дальнейшем будет указываться ссылкой как «режим HV»), например, в котором, в то время как двигатель 10 внутреннего сгорания приведен в действие или остановлен в зависимости от обстоятельств, с тем чтобы выдавать расходуемую на движение мощность на ведущий вал 32, расходуемая на движение мощность с первого двигатель-генератора 12 и второго двигатель-генератора 14 также выдается на ведущий вал 32 в зависимости от обстоятельств (то есть, режима движения транспортного средства 1 в первом состоянии вождения, втором состоянии вождения и третьем состоянии вождения в зависимости от обстоятельств).
В настоящем варианте осуществления, двигатель 10 внутреннего сгорания и двигатель-генераторы 12, 14 управляются в двух режимах работы, в том числе, первом режиме работы и втором режиме работы. Однако, двигатель 10 внутреннего сгорания и двигатель-генераторы 12, 14 могут управляться в трех или более разных режимах работы. Однако, в таком случае, три или более разных режимов работы должны отличаться по коэффициенту использования двигателя друг от друга.
Управление SOC
Затем, управление SOC в настоящем варианте осуществления будет описано со ссылкой на фиг. 3 и 4. Фиг. 3 иллюстрирует зависимость между расстоянием до зарядной станции и SOC, и режимом работы. В нижеследующем описании, первым режимом работы является режим EV, а вторым режимом работы является режим HV для легкого понимания.
Теперь, в случае, где аккумуляторная батарея 20 может заряжаться от внешнего источника 70 питания, как в транспортном средстве 1 по настоящему варианту осуществления, SOC аккумуляторной батареи 20 предпочтительно как можно более низок, когда транспортное средство 1 прибывает на зарядную станцию (например, место жительства), которая оснащена внешним источником 70 питания. Снижение SOC аккумуляторной батареи 20 в момент времени, когда транспортное средство 1 прибывает на зарядную станцию, дает возможность сокращать период работы двигателя 10 внутреннего сгорания во время передвижения транспортного средства 1, чтобы, тем самым, сдерживать объем расхода топлива. На зарядной станции, внешний разъем 72 присоединяется к бортовому разъему 22 транспортного средства, и аккумуляторная батарея 20 заряжается. Соответственно, SOC аккумуляторной батареи 20 может увеличиваться.
Соответственно, в настоящем варианте осуществления, блок 42 управления выходной мощностью управляет двигателем 10 внутреннего сгорания и двигатель-генераторами 12, 14, так чтобы, когда транспортное средство 1 передвигается вне зарядной станции, SOC аккумуляторной батареи 20 в момент времени, когда транспортное средство 1 прибывает на зарядную станцию, имело значение целевого SOC (относительно низкого SOC).
Здесь, когда транспортное средств 1 передвигается вне определенной зарядной станции, количество электроэнергии, требуемое, чтобы транспортное средство 1 прибывало на зарядную станцию из текущего местоположения, двигаясь только в режиме EV, пропорционально расстоянию от текущего местоположения до зарядной станции. Поэтому, когда длина перемещения от текущего местоположения до зарядной станции может быть получена, может быть получено количество электроэнергии, требуемое, чтобы транспортное средство 1 прибывало на зарядную станцию из текущего местоположения, двигаясь только в режиме EV. Соответственно, в настоящем варианте осуществления, электроэнергия, требуемая для прибытия на зарядную станцию, рассчитывается на основании расстояния от текущего местоположения до зарядной станции, и SOC переключения рассчитывается прибавлением рассчитанной электроэнергии к целевому SOC. Когда SOC в текущий момент времени равно или больше SOC переключения, блок 42 управления выходной мощностью управляет двигателем 10 внутреннего сгорания и двигатель-генераторами 12, 14 в режиме EV. Между тем, когда SOC в текущий момент времени меньше SOC переключения, блок 42 управления выходной мощностью управляет двигателем 10 внутреннего сгорания и двигатель-генераторами 12, 14 в режиме HV.
Как результат, как проиллюстрировано на фиг. 3, когда расстояние от зарядной станции является практически нулевым, SOC переключения устанавливается в целевое SOC. По мере того, как расстояние от зарядной станции возрастает, SOC переключения устанавливается в большее значение. Однако, когда расстояние от зарядной станции становится равным или большим, чем опорное значение Dref, SOC переключения поддерживается постоянным. Достаточным SOC является SOC, достаточно высокое для удовлетворения отдачи расходуемой на движение мощности. Соответственно, когда SOC становится более высоким, чем достаточное SOC, могут происходить следующие события. То есть, величина зарядки на зарядной станции, которая используется в первый раз, уменьшается, и транспортному средству 1 не удается зарядить аккумуляторную батарею 20 электроэнергией, полученной посредством рекуперативного торможения, например, выполняемого во время передвижения по длинному нисходящему склону.
Примеры зарядной станции могут включать в себя зарядные стенды и офисы в дополнение к месту жительства. Поэтому, зарядная станция не обязательно ограничена одной, но, во многих случаях, присутствует множество зарядных станций. В таком случае, SOC переключения рассчитывается, принимая во внимание зарядные станции вокруг текущего местоположения транспортного средства 1.
Фиг. 4 иллюстрирует зависимость, аналогичную зависимости на фиг. 3, с множеством зарядных станций, присутствующих вокруг транспортного средства 1. В примере, проиллюстрированном на фиг. 4, расстояние от текущего местоположения транспортного средства 1 до зарядной станции имеет значение Da, а расстояние от текущего местоположения до зарядной станции b имеет значение Db (< Da). В дополнение, целевое SOC может быть разным для каждой зарядной станции, как описано позже. В примере, проиллюстрированном на фиг. 4, целевым SOC на зарядной станции a является SOCta, а целевым SOC на зарядной станции b является SOCtb (> SOCta).
В таком случае, что касается зарядной станции a, зависимость между расстоянием до зарядной станции и SOC, и режимом работы, проиллюстрирована в виде сплошной линии на чертеже. Что касается зарядной станции b, зависимость между расстоянием до зарядной станции и SOC, и режимом работы, проиллюстрирована в виде прерывистой линии на чертеже.
В примере, проиллюстрированном на фиг. 4, SOC переключения в текущем местоположении имеет значение SOCsa на зависимости для зарядной станции a. На зависимости для зарядной станции b, SOC переключения в текущем местоположении имеет значение SOCsb. Здесь, SOC переключения в текущем местоположении по существу установлено в SOCsb, поскольку SOCsb является меньшим, чем SOCsa. Поэтому, в ситуации по примеру, проиллюстрированному на фиг. 4, когда SOC в текущий момент времени, рассчитанный на основании выходного сигнала датчика 51 напряжения, равен или больше SOCsb, блок 42 управления выходной мощностью управляет двигателем 10 внутреннего сгорания и двигатель-генераторами 12, 14 в режиме EV. Когда SOC в текущий момент времени меньше SOCsb переключения, блок 42 управления выходной мощностью управляет двигателем 10 внутреннего сгорания и двигатель-генераторами 12, 14 в режиме HV.
В варианте осуществления, SOC переключения рассчитывается на основании расстояния от текущего местоположения до зарядной станции. Однако SOC переключения может рассчитываться на основании других параметров, таких как количество электроэнергии, требуемое для прибытия на зарядную станцию из текущего местоположения, вместо расстояния от текущего местоположения до зарядной станции. Например, в случае, где крутой восходящий уклон присутствует на маршруте, или в других случаях, количество электроэнергии, требуемой для каждого определенного расстояния, возрастает. Соответственно, когда SOC переключения рассчитывается на основании расстояния от текущего местоположения до зарядной станции, не обязательно должно рассчитываться отвечающее требованиям значение. Когда используется кондиционер воздуха (не проиллюстрирован) транспортного средства 1, расход энергии возрастает. Даже в таких случаях, когда SOC переключения рассчитывается на основании количества электроэнергии, требуемой для прибытия на зарядную станцию из текущего местоположения, SOC переключения может рассчитываться надлежащим образом.
В варианте осуществления, когда зарядные станции присутствуют вокруг транспортного средства 1, SOC переключения в заключение устанавливается в наименьшее значение, из SOC переключения для каждой из зарядных станций. Однако, когда пункт назначения транспортного средства 1 введен через навигационную систему (не проиллюстрирована), и тому подобное, и пункт назначения является одной из зарядных станций, например, SOC переключения, рассчитанный в отношении такой зарядной станции, может быть установлен в качестве конечного SOC переключения.
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления по управлению режимом движения, которая устанавливает режим движения. Проиллюстрированная процедура управления выполняется с постоянными промежутками времени.
Сначала, на этапе S11, получается целевое SOC для каждой зарядной станции, зарегистрированной в ECU 40. Способ установки целевого SOC для каждой зарядной станции описан позже. Затем, на этапе S12, текущее местоположение транспортного средства 1 получается на основании информации, такой как информация о текущем местоположении, выявленная приемником 52 GPS.
Затем, на этапе S13, рассчитывается количество электроэнергии, требуемое для прибытия на каждую базовую станцию из текущего местоположения. При расчете количества электроэнергии, количеств электроэнергии рассчитывается на основании информации, такой как информация о текущем местоположении, выявленная приемником 52 GPS, картографическая информация, хранимая в ECU 40, и информация о заторах движения, переданная с сервера через бортовое устройство 53 связи.
Затем, на этапе S14, SOC переключения для каждой зарядной станции рассчитывается на основании целевого SOC для каждой зарядной станции, рассчитанного на этапе S11, и количества электроэнергии, требуемого для прибытия на каждую зарядную станцию, рассчитанного на этапе S13. Из SOC переключения каждой зарядной станции, наименьшее значение рассчитывается в качестве конечного SOC переключения.
Затем, на этапе S15, определяется, является или нет SOC в текущий момент времени, рассчитанное на основании выходных данных датчика 51 напряжения, равным или большим, чем SOC переключения, рассчитанное на этапе S14. Когда на этапе S15 определено, что SOC в текущий момент времени равно или больше SOC переключения, обработка переходит на этап S16. На этапе S16, блок 42 управления выходной мощностью управляет двигателем 10 внутреннего сгорания и двигатель-генераторами 12, 14 в режиме EV, и процедура управления заканчивается. Когда на этапе S15 определено, что SOC в текущий момент времени меньше SOC переключения, обработка переходит на этап S17. На этапе S17, блок 42 управления выходной мощностью управляет двигателем 10 внутреннего сгорания и двигатель-генераторами 12, 14 в режиме HV, и процедура управления заканчивается.
Проблемы
Например, бывает случай, где водитель не присоединяет транспортное средство 1 к внешнему источнику 70 питания, даже когда транспортное средство 1 прибывает на зарядную станцию, такую как место жительства. Таким образом, когда транспортное средство 1 не присоединено к внешнему источнику 70 питания на зарядной станции, в то время как целевое SOC установлено на низкое значение, транспортное средство 1 вынуждено уезжать с зарядной станции в состоянии, где SOC является низким значением, когда транспортное средство 1 едет в следующий раз. Когда передвижение транспортного средства 1 выполняется в состоянии, где SOC является низким, становится необходимым ограничивать выходную мощность электродвигателя. Это затрудняет получение достаточной отдачи расходуемой на движение мощности транспортного средства 1.
Когда целевое SOC установлено в высокое значение, принимая во внимание вероятность, что водитель не соединяет транспортное средство 1 с внешним источником 70 питания, транспортное средство 1 будет прибывать на зарядную станцию, совершенно не расходуя электроэнергию, накопленную в аккумуляторной батарее 20. Как результат, становится трудно в достаточной мере сокращать время работы двигателя внутреннего сгорания, что приводит к несостоятельности достаточного сдерживания величины потребления топлива в двигателе внутреннего сгорания.
Установление целевого SOC
Здесь, в транспортном средстве 1 по настоящему варианту осуществления, ECU 40 включает в себя блок 43 установки целевого SOC, который устанавливает целевое SOC для каждой зарядной станции. Блок 43 установки целевого SOC оценивает, для каждой зарядной станции, вероятность (в дальнейшем указываемую ссылкой как «вероятность зарядки»), что аккумуляторная батарея 20 заряжается от внешнего источника 70 питания на каждой зарядной станции, когда транспортное средство 1 прибывает на каждую соответствующую зарядную станцию. В дополнение, блок 43 установки целевого SOC устанавливает целевое SOC ниже, когда оцененная вероятность зарядки относительно высока, чем когда оцененная вероятность зарядки относительно низка.
Вероятность зарядки на каждой зарядной станции, например, оценивается на основании предыстории зарядки, которая является предысторией зарядки аккумуляторной батареи 20 от внешнего источника 70 питания, когда транспортное средство 1 останавливалось на каждой зарядной станции в прошлом. В настоящем варианте осуществления, в частности, предыстория зарядки на каждой зарядной станции включает в себя частоту внешней зарядки, которая является частотой зарядки аккумуляторной батареи 20 от внешнего источника 70 питания, когда транспортное средство 1 останавливалось на каждой соответствующей зарядной станции в прошлом.
Поэтому, в настоящем варианте осуществления, целевое SOC на каждой зарядной станции устанавливается на основании прошлой частоты внешней зарядки на каждой соответствующей зарядной станции. Может быть упомянуто, что вероятность зарядки на каждой зарядной станции имеет более высокое значение, в то время как выше прошлая частота внешней зарядки на каждой соответствующей зарядной станции. Соответственно, целевое SOC устанавливается ниже, когда прошлая частота внешней зарядки на каждой зарядной станции относительно высока, чем когда прошлая частота внешней зарядки на каждой соответствующей зарядной станции относительно низка.
Фиг. 6 иллюстрирует зависимость между частотой внешней зарядки и целевым SOC. Частота внешней зарядки представляет собой отношение количества раз, которое выполняется зарядка от внешнего источника 70 питания, в то время как транспортное средство остановлено на определенной зарядной станции, к количеству раз, которое транспортное средство 1 останавливалось на этой определенной зарядной станции. Поэтому, когда зарядка никогда не выполнялась на зарядной станции, когда транспортное средство 1 останавливалось на ней, частота внешней зарядки становится нулевой. Когда зарядка выполнялась всегда, когда бы транспортное средство 1 ни останавливалось на зарядной станции, частота внешней зарядки имеет значение 100%.
Как ясно из фиг. 6, в настоящем варианте осуществления, целевое SOC на определенной зарядной станции устанавливается более низким, в то время как прошлая частота внешней зарядки на зарядной станции является более высокой. Поэтому, в настоящем варианте осуществления, целевое SOC на определенной зарядной станции устанавливается ниже, в то время как вероятность зарядки на зарядной станции является более высокой.
Посредством установки целевого SOC таким образом, SOC аккумуляторной батареи 20 является низким, когда транспортное средство 1 прибывает на зарядную станцию с высокой вероятностью зарядки. Таким образом, SOC аккумуляторной батареи 20 является низким, когда транспортное средство 1 пребывает на зарядную станцию, что дает возможность минимизировать время работы двигателя 10 внутреннего сгорания до тех пор, пока транспортное средство 1 не пребывает на зарядную станцию, и, тем самым, сдерживать величину расхода топлива двигателем 10 внутреннего сгорания. В дополнение, поскольку вероятность зарядки высока на такой зарядной станции, есть высокая вероятность, что SOC аккумуляторной батареи 20 является достаточно высоким, когда транспортное средство 1 вновь начнет передвигаться с зарядной станции. Соответственно, менее вероятно, что управление ограничением выходной мощности двигатель-генераторов 12, 14 выполняется вследствие низкого SOC аккумуляторной батареи 20, когда транспортное средство 1 вновь начинает двигаться. Поэтому, может достигаться достаточная отдача расходуемой на движение мощности.
Между тем, когда транспортное средство 1 прибывает на зарядную станцию с низкой вероятностью зарядки, SOC аккумуляторной батареи 20 является высоким. Поскольку вероятность зарядки низка, есть высокая вероятность, что SOC аккумуляторной батареи 20 в момент времени, когда транспортное средство 1 вновь передвигается с зарядной станции, неизменен по сравнению с SOC в момент времени, когда транспортное средство 1 прибывало на зарядную станцию. Однако, даже когда аккумуляторная батарея 20 не заряжается от внешнего источника 70 питания, в то время как транспортное средство останавливается на зарядной станции, и значит, SOC является таким же, как SOC в момент времени, когда транспортное средство 1 прибывало на зарядную станцию, SOC все еще является относительно высоким. Соответственно, есть низкая необходимость выполнения управления ограничением выходной мощности двигатель-генераторов 12, 14 вследствие низкого SOC аккумуляторной батареи 20, когда транспортное средство 1 вновь начинает двигаться. Поэтому, может достигаться достаточная отдача расходуемой на движение мощности.
Пояснение блок-схемы последовательности операций
Фиг. 7 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления по управлению расчетом целевого SOC, которая рассчитывает целевое SOC на каждой зарядной станции. Проиллюстрированная процедура управления приводится в исполнение с постоянными промежутками времени или всякий раз, когда обновляется частота внешней зарядки на каждой из зарядных станций.
Как проиллюстрировано на фиг. 7, сначала, на этапе S21, получается частота внешней зарядки для каждой зарядной станции. Например, частота внешней зарядки рассчитывается для каждой зарядной станции посредством управления расчетом частоты внешней зарядки, описанного позже со ссылкой на фиг. 8. Рассчитанная частота внешней зарядки сохраняется в памяти ECU 40. На этапе S21, частота внешней зарядки для каждой зарядной станции извлекается из памяти ECU 40.
Затем, на этапе S22, целевое SOC для каждой зарядной станции, например, рассчитывается по карте, как проиллюстрировано на фиг. 6, на основании частоты внешней зарядки для каждой зарядной станции, собранной на этапе S21. Затем, процедура управления заканчивается.
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления по управлению расчетом частоты внешней зарядки для расчета частоты внешней зарядки на определенной зарядной станции (зарядной станции A). Проиллюстрированная процедура управления приводится в исполнение с постоянными промежутками времени.
Как проиллюстрировано на фиг. 8, сначала, на этапе S31, текущее местоположение получается приемником 52 GPS или тому подобным. Затем, на этапе S32, на основании текущего местоположения, полученного на этапе S31, определяется, прибыло ли транспортное средство 1 только что на определенную конкретную зарядную станцию A или нет. Зарядная станция A является одной из зарядных станций, зарегистрированных в ECU 40. Регистрация зарядных станций в ECU 40 выполняется пользователем или пользователями вручную. В качестве альтернативы, когда транспортное средство 1 заряжается на определенном сооружении, ECU 40 может быть выполнен с возможностью автоматически регистрировать сооружение в качестве зарядной станции.
Когда на этапе S32 определено, что транспортное средство 1 только что прибыло на зарядную станцию A, счетчику Na, указывающему количество прибытий на зарядную станцию A дается приращение на единицу на этапе S33, и обработка переходит на этап S34. Когда определяется, что транспортное средство 1 не прибыло только что на зарядную станцию A, то есть, транспортное средство 1 передвигается за пределами зарядной станции A, или транспортное средство 1 находится в остановленном состоянии на зарядной станции A, тогда этап S33 пропускается.
На этапе S34, на основании текущего местоположения, полученного на этапе S31, определяется, уехало ли транспортное средство 1 только что с зарядной станции A или нет. Когда, на этапе S34 определено, что транспортное средство 1 только что покинуло зарядную станцию A, обработка переходит на этап S35.
На этапе S35, определяется, заряжалась ли аккумуляторная батарея 20 от внешнего источника 70 питания на зарядной станции A или нет, в то время как транспортное средство 1 останавливалось на зарядной станции A, до отъезда с зарядной станции A. Заряжалась или нет аккумуляторная батарея 20, например, определяется посредством сравнения SOC, когда транспортное средство 1 прибыло на зарядную станцию A, и SOC, когда транспортное средство 1 уезжает с зарядной станции A. Когда SOC в момент времени отъезда с зарядной станции A находится выше, чем SOC в момент времени прибытия на зарядную станцию A, определяется, что аккумуляторная батарея 20 заряжалась, в то время как транспортное средство 1 останавливалось на зарядной станции A.
Когда на этапе S35 определено, что аккумуляторная батарея 20 заряжалась на зарядной станции A, в то время как транспортное средство 1 останавливалось на зарядной станции A, обработка переходит на этап S36. На этапе S36, счетчику Nr, указывающему количество зарядок на зарядной станции A, дается приращение на единицу, и обработка переходит на этап S37. Между тем, когда на этапе S35 определено, что аккумуляторная батарея 20 не заряжалась на зарядной станции A, в то время как транспортное средство 1 останавливалось на зарядной станции A, то этап S36 пропускается.
Когда на этапе S34 определено, что транспортное средство 1 еще не уехало с зарядной станции, то есть, транспортное средство 1 находится в остановленном состоянии на зарядной станции A, или транспортное средство 1 передвигается за пределами зарядной станции A, тогда этапы S35 и S36 пропускаются.
На этапе S37, частота Fr внешней зарядки рассчитывается делением значения счетчика Nr, указывающего количество зарядок, рассчитанное на этапе S36, на значение счетчика Na, указывающего количество прибытий, рассчитанное на этапе S33 (Fr=Nr/Na). Поэтому, в данной процедуре управления, отношение количества зарядок, выполненных на зарядной станции A, к количеству прибытий на зарядную станцию A, рассчитывается в качестве частоты внешней зарядки.
Модификация первого варианта осуществления
Затем, со ссылкой на фиг. 9, будет описана модификация первого варианта осуществления. В первом варианте осуществления, частота внешней зарядки рассчитывается независимо от SOC в момент времени, когда транспортное средство 1 прибывало на зарядную станцию. Однако, SOC в момент времени, когда транспортное средство 1 прибыло на зарядную станцию, является высоким, например, когда транспортное средство отъезжает на короткое расстояние после того, как заряжается аккумуляторная батарея 20, а затем возвращается на зарядную станцию. Таким образом, когда SOC в момент времени прибытия на зарядную станцию является высоким, пользователь не ощущает необходимости зарядки аккумуляторной батареи 20 на зарядной станции. Поэтому, в таком случае, есть высокая вероятность, что зарядка не выполняется на зарядной станции.
Соответственно, в представленной модификации, частота внешней зарядки на зарядной станции рассчитывается, принимая во внимание SOC в момент времени, когда транспортное средство 1, прибывало на зарядную станцию. Более точно, когда SOC в момент времени, когда транспортное средство 1 прибывало на зарядную станцию, равно или меньше требуемого для зарядки SOC, частота внешней зарядки обновляется на основании наличия и отсутствия зарядки. Когда SOC в момент времени, когда транспортное средство 1 прибыло на зарядную станцию, находится выше, чем требуемое для зарядки SOC, частота внешней зарядки не обновляется. Поэтому, в представленной модификации, может быть упомянуто, что частота внешней зарядки является частотой зарядки аккумуляторной батареи 20 от внешнего источника 70 питания, выполняемой, в то время как транспортное средство 1 остановлено на зарядной станции, и когда SOC в момент времени, когда транспортное средство 1 прибывало на зарядную станцию, равно или меньше предопределенного требуемого для зарядки SOC.
В представленной модификации, частота внешней зарядки обновляется, принимая во внимание SOC в момент времени, когда транспортное средство 1, прибывало на зарядную станцию. Однако, частота внешней зарядки может обновляться, принимая во внимание другие параметры. Примеры других параметров могут включать в себя длину перемещения транспортного средства 1 до тех пор, пока транспортное средство 1 не прибывает на зарядную станцию, на этот раз, после того, как транспортное средство 1 уехало с зарядной станции в прошлый раз. В этом случае, например, когда длина перемещения невелика, частота внешней зарядки, основанная на наличии и отсутствии зарядки на зарядной станции, на этот раз не обновляется.
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления по управлению расчетом частоты внешней зарядки, согласно данной модификации. Проиллюстрированная процедура управления приводится в исполнение с постоянными промежутками времени. Поскольку этапы S41, S42, S46 и S47 на фиг. 9 аналогичны этапам S31, S32, S34 и S35 на фиг. 8, их описание опущено.
Когда, на этапе S42 определено, что транспортное средство 1 только что прибыло на зарядную станцию A, обработка переходит на этап S43. На этапе S43, определяется, является или нет SOC в текущий момент времени (то есть, в момент времени, когда транспортное средство 1 прибывало на зарядную станцию A) равным или большим, чем предопределенное требуемое для зарядки SOC. Когда на этапе S43 определено, что SOC в текущий момент времени равно или больше требуемого для зарядки SOC, обработка переходит на этап S44. На этапе S44, флажковый признак Xn ненужности зарядки, указывающий, что SOC недостаточно низок, чтобы требовать зарядки, устанавливается в «1». Когда на этапе S43 определено, что SOC в текущий момент времени равно или меньше требуемого для зарядки SOC, обработка переходит на этап S45. На этапе S45, счетчику Na, указывающему количество прибытий на зарядную станцию A, дается приращение на единицу, как на этапе S33 по фиг. 8. Поэтому, в данной процедуре управления, когда SOC в текущий момент времени является большим, чем требуемое для зарядки SOC, счетчик, указывающий количество прибытий, не обновляется.
На этапе S48, определяется, равен или нет «0» флажковый признак Xn ненужности зарядки. Когда на этапе S48 определено, что флажковый признак Xn ненужности зарядки равен «0», обработка переходит на этап S49. На этапе S49, как на этапе S36 по фиг. 8, счетчику Nr, указывающему количество зарядок на зарядной станции A, дается приращение на единицу, и обработка переходит на этап S51. Между тем, когда на этапе S49 определено, что флажковый признак Xn ненужности зарядки не равен «0», обработка переходит на этап S50. На этапе S50, флажковый признак Xn ненужности зарядки сбрасывается в «0», и обработка переходит на этап S51. Поэтому, в данной процедуре управления, когда SOC в текущий момент времени является большим, чем требуемое для зарядки SOC, счетчику, указывающему количество зарядок, приращение также не дается.
На этапе S51, частота Fr внешней зарядки рассчитывается, как на этапе S37 по фиг. 8. Поэтому, в данной процедуре управления, может быть упомянуто, что частота Fr внешней зарядки представляет собой частоту зарядки аккумуляторной батареи 20 от внешнего источника 70 питания, выполняемой, в то время как транспортное средство 1 остановлено на зарядной станции A, и когда SOC в момент времени, когда транспортное средство 1 прибывало на зарядную станцию A, равно или меньше требуемого для зарядки SOC.
Второй вариант осуществления
Далее, со ссылкой на фиг. 10 и 11, приведено описание транспортного средства с гибридным приводом согласно второму варианту осуществления. Конфигурация и управление транспортным средством 1 с гибридным приводом согласно второму варианту осуществления по существу аналогичны конфигурации и управлению транспортного средства 1 с гибридным приводом согласно первому варианту осуществления. Соответственно, главным образом, ниже будет описано отличие от транспортного средства с гибридным приводом согласно первому варианту осуществления.
Может приниматься во внимание, что вероятность зарядки на каждой зарядной станции изменяется вследствие различных факторов. Например, когда погода хорошая, легко присоединять внешний разъем 72 к бортовому разъему 22 транспортного средства. Однако, когда плохая погода, такая как дождливая погода, присоединять внешний разъем 72 к бортовому разъему 22 транспортного средства затруднительно. Соответственно, может приниматься во внимание, что вероятность зарядки изменяется в соответствии с погодой. Также может приниматься во внимание, что вероятность зарядки изменяется в соответствии с днем недели или временным интервалом. В дополнение, когда множество людей водят транспортное средство 1, может приниматься во внимание, что вероятность зарядки различна для каждого водителя. Более того, когда есть большое количество занимающих места людей, в том числе, ребенок, в транспортном средстве 1, становится трудно присоединять внешний разъем 72, так как необходимо, чтобы ребенок был под контролем, после того, как занимающий место человек или занимающие места люди вышли из транспортного средства.
Соответственно, в настоящем варианте осуществления, целевое SOC устанавливается, принимая во внимание состояния окружающей среды транспортного средства (состояния времени и среды внутри и вне транспортного средства), в том числе, временной интервал в дневное время, день недели, погоду, водитель и количество занимающих места людей, когда транспортное средство останавливалось на зарядной станции в прошлом. Соответственно, в настоящем варианте осуществления, предыстория зарядки, используемая для оценки вероятности зарядки на каждой зарядной станции, включает в себя частоту внешней зарядки для каждого из состояний окружающей среды транспортного средства, которые отличаются друг от друга по меньшей мере одной из следующих категорий: временным интервалом в дневное время, днем недели, погодой, водителем и количеством занимающих места людей. Поэтому, в настоящем варианте осуществления, предыстория зарядки, например, включает в себя частоту внешней зарядки для каждой погоды (такой как хорошая погода, дождливая погода и снежная погода). В качестве альтернативы, предыстория зарядки, например, включает в себя предысторию внешней зарядки для каждого разного водителя.
В настоящем варианте осуществления, блок 43 установки целевого SOC получает состояние окружающей среды транспортного средства в текущий момент времени или в момент времени, когда ожидается, что транспортное средство должно прибывать на зарядную станцию. Состояние окружающей среды транспортного средства получается различными датчиками и устройствами связи, присоединенными к ECU 40.
Например, временной интервал и день недели получаются по часам, включенным в ECU 40. В качестве альтернативы, временной интервал и день недели могут получаться посредством приема информации о дате и информации о времени с внешнего сервера через бортовое устройство 53 связи. Погода, например, получается посредством приема информации о погоде вокруг текущего местоположения или зарядных станций с внешнего сервера через бортовое устройство 53 связи. В качестве альтернативы, информация о погоде касательно текущего местоположения может собираться на основании выходного сигнала датчика 57 дождя.
Информация о текущем водителе (например, информация, такая как кто является текущим водителем из множества зарегистрированных водителей) получается на основании изображения лица, сфотографированного камерой 54 контроля водителя. В качестве альтернативы, информация о текущем водителе может получаться на основании информации о ключе, собранной датчиком 55 ключа. В дополнение, количество занимающих места людей получается на основании выходных данных датчика 56 веса.
Более того, в настоящем варианте осуществления, целевое SOC устанавливается ниже, когда полученное состояние окружающей среды транспортного средства является состоянием окружающей среды транспортного средства с относительно высокой частотой внешней зарядки, чем когда полученное состояние окружающей среды транспортного средства является состоянием окружающей среды транспортного средства с относительно низкой частотой внешней зарядки.
Например, рассмотрим случай, где частота внешней зарядки на определенной зарядной станции является более высокой, когда погода хорошая в момент времени, когда транспортное средство 1 прибыло на зарядную станцию, чем когда погода дождливая. В этом случае, блок 43 установки целевого SOC собирает данные о погоде в текущий момент времени или в момент времени, когда ожидается, что транспортное средство должно прибыть на зарядную станцию, на основании информации о погоде, принятой с внешнего сервера через бортовое устройство 53 связи. Целевое SOC устанавливается ниже, когда полученная погода является хорошей (состояние окружающей среды транспортного средства с относительно высокой частотой внешней зарядки), чем когда полученная погода является дождливой (состояние окружающей среды транспортного средства с относительно низкой частотой внешней зарядки).
Например, рассмотрим случай, где частота внешней зарядки на определенной зарядной станции находится выше, когда водителем, осуществляющим вождение в момент времени, когда транспортное средство 1 прибыло на зарядную станцию, является водитель S, чем когда водителем является водитель T. В этом случае, блок 43 установки SOC получает водителя в текущий момент времени или момент времени, когда ожидается, что транспортное средство должно прибыть на зарядную станцию, на основании выходных данных камеры 54 контроля водителя, или тому подобного. В таком случае, целевое SOC устанавливается ниже, когда полученным водителем является водитель S (состояние окружающей среды транспортного средства с относительно высокой частотой внешней зарядки), чем когда полученным водителем является водителем T (состояние окружающей среды транспортного средства с относительно низкой частотой внешней зарядки).
В дополнение, рассмотрим случай, где частота внешней зарядки на определенной зарядной станции является более высокой, когда временной интервал, в который транспортное средство 1 прибывает на зарядную станцию является конкретным временным интервалом (например, с 17:00 до 18:00), чем когда временной интервал является любыми другими временными интервалами. В этом случае, блок 43 установки SOC получает текущий временной интервал или временной интервал, в котором ожидается, что транспортное средство должно прибыть на зарядную станцию, на основании часов, включенных в ECU 40. В таком случае, целевое SOC устанавливается ниже, когда полученным временным интервалом является конкретный временной интервал (состояние окружающей среды транспортного средства с относительно высокой частотой внешней зарядки), чем когда полученным временным интервалом являются любые другие временные интервалы (состояние окружающей среды транспортного средства с относительно низкой частотой внешней зарядки).
Более того, рассмотрим случай, где частота внешней зарядки на определенной зарядной станции является более высокой, когда день недели, в который транспортное средство 1 прибыло на зарядную станцию, является конкретным днем недели (например, воскресеньем), чем когда днем недели являются любые другие дни. В этом случае, блок 43 установки SOC получает текущий день недели на основании часов, встроенных в ECU 40. В таком случае, целевое SOC устанавливается ниже, когда полученный день недели является конкретным днем недели (состояние окружающей среды транспортного средства с относительно высокой частотой внешней зарядки), чем когда полученный день недели является любыми другими днями (состояние окружающей среды транспортного средства с относительно низкой частотой внешней зарядки).
В качестве альтернативы, рассмотрим случай, где частота внешней зарядки на определенной зарядной станции является более высокой, когда количество занимающих места людей в момент времени, когда транспортное средство 1 прибыло на зарядную станцию, является конкретным количеством (например, одним), чем когда количество занимающих места людей является любым другим количеством. В этом случае, блок 43 установки SOC получает количество занимающих места людей, рассчитанное на основании выходных данных датчика 56 веса. В таком случае, целевое SOC устанавливается ниже, когда полученное количество занимающих места людей является конкретным количеством (состояние окружающей среды транспортного средства с относительно высокой частотой внешней зарядки), чем когда полученное количество занимающих места людей является любым другим количеством (состояние окружающей среды транспортного средства с относительно низкой частотой внешней зарядки).
Согласно настоящему варианту осуществления, целевое SOC изменяется в соответствии с состоянием окружающей среды транспортного средства таким образом. Как результат, целевое SOC может устанавливаться надлежащим образом в соответствии с вероятностью зарядки на каждой зарядной станции.
Блок-схема последовательности операций способа
Фиг. 10 - блок-схема последовательности операций способа, иллюстрирующая процедуру управления по управлению расчетом целевого SOC, которая рассчитывает целевое SOC на каждой зарядной станции. Проиллюстрированная процедура управления приводится в исполнение с постоянными промежутками времени или всякий раз, когда обновляется частота внешней зарядки на каждой зарядной станции.
Сначала, на этапе S61, получается базовая частота Frb внешней зарядки для каждой зарядной станции. Например, базовая частота зарядки рассчитывается для каждой зарядной станции посредством управления расчетом частоты внешней зарядки и поправочного значения, описанного позже со ссылкой на фиг. 11. Рассчитанная базовая частота зарядки сохраняется в памяти ECU 40.
Затем, на этапе S62, состояние окружающей среды транспортного средства, когда транспортное средство 1 прибывает на зарядную станцию, получается на основании выходных данных различных датчиков и устройств связи для каждой зарядной станции. Более точно, например, получается погода в момент времени, когда транспортное средство 1 прибывает на зарядную станцию.
Затем, на этапе S63, получается поправочное значение частоты внешней зарядки, соответствующее состоянию окружающей среды транспортного средства, полученному на этапе S62. Более точно, например, получаются поправочное значение в момент времени, когда погода хорошая, или поправочное значение в момент времени, когда погода дождливая. Например, поправочное значение для каждого состояния окружающей среды транспортного средства рассчитывается применительно к каждой зарядной станции посредством управления расчетом частоты внешней зарядки и поправочного значения, описанного позже со ссылкой на фиг. 11. Рассчитанное поправочное значение сохраняется в памяти ECU 40
Затем, на этапе S64, частота внешней зарядки на каждой зарядной станции рассчитывается посредством коррекции базовой частоты внешней зарядки, полученной на этапе S61, с использованием поправочного значения частоты внешней зарядки, полученного на этапе S63. Более точно, например, базовая частота внешней зарядки корректируется посредством умножения базовой частоты внешней зарядки на поправочное значение или прибавления поправочного значения к базовой частоте внешней зарядки.
Затем, на этапе S65, целевое SOC для каждой зарядной станции, например, рассчитывается по карте, как проиллюстрировано на фиг. 6, на основании частоты внешней зарядки для каждой зарядной станции, рассчитанной на этапе S64. Затем, процедура управления заканчивается.
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления по управлению расчетом частоты внешней зарядки и поправочного значения для расчета частоты внешней зарядки на определенной зарядной станции (зарядной станции A) и расчета поправочного значения. Проиллюстрированная процедура управления приводится в исполнение с постоянными промежутками времени.
Как проиллюстрировано на фиг. 11, сначала, на этапе S71, получается текущее местоположение. Затем, на этапе S72, определяется, прибыло ли транспортное средство 1 только что на зарядную станцию A или нет. На этапе S73, определяется, дождлива или нет погода на зарядной станции A. Когда на этапах S72 и S73 определено, что транспортное средство только что прибыло на зарядную станцию A, а погода на зарядной станции A дождлива, обработка переходит на этап S74. Иначе, этап S74 пропускается. На этапе S74, флажковый признак Xr дождя устанавливается в «1», и обработка переходит на этап S75.
На этапе S75, определяется, уехало ли транспортное средство 1 только что с зарядной станции A или нет. Когда определено, что транспортное средство 1 не уехало с зарядной станции A, этапы с S76 по S83 пропускаются. Когда, на этапе S75 определено, что транспортное средство 1 только что уехало с зарядной станции A, обработка переходит на этап S76.
На этапе S76, определяется, заряжалась или нет аккумуляторная батарея 20 от внешнего источника 70 питания, в то время как транспортное средство 1 было остановлено на зарядной станции A, до отъезда с зарядной станции A. Когда определено, что аккумуляторная батарея 20 заряжалась, в то время как транспортное средство 1 было остановлено на зарядной станции A, обработка переходит на этап S77. На этапе S77, определяется, равен или нет «1» флажковый признак Xr дождя, то есть, была или нет погода дождливой в момент времени прибытия на зарядную станцию A. Когда определяется, что флажковый признак Xr дождя равен «1», обработка переходит на этап S78, а счетчику Nrc, указывающему количество зарядок, выполненных в дождливую погоду (количество зарядок в дождливую погоду) дается приращение на единицу. Между тем, когда на этапе S77 определено, что флажковый признак Xr дождя не равен «1», обработка переходит на этап S79. На этапе S79, счетчику Nfc, указывающему количество зарядок, выполненных в хорошую погоду (количество зарядок в хорошую погоду), дается приращение на единицу.
Между тем, когда на этапе S76 определено, что аккумуляторная батарея 20 не заряжалась, в то время как транспортное средство 1 останавливалось на зарядной станции A, тогда обработка переходит на этап S80. На этапе S80, определяется, равен или нет «1» флажковый признак Xr дождя. Когда определяется, что флажковый признак Xr дождя равен «1», обработка переходит на этап S81, а счетчику Nrn, указывающему количество зарядок, не выполненных в дождливую погоду (количество пропущенных зарядок в дождливую погоду) дается приращение на единицу. Между тем, когда на этапе S80 определено, что флажковый признак Xr дождя не равен «1», обработка переходит на этап S82. На этапе S82, счетчику Nfn, указывающему количество зарядок, не выполненных в хорошую погоду (количество пропущенных зарядок в хорошую погоду), дается приращение на единицу.
Флажковый признак Xr дождя сбрасывается в «0» на этапе S83. Затем, на этапе S84, частота внешней зарядки (частота внешней зарядки в дождливую погоду), Frr, в случае дождливой погоды в момент времени прибытия на зарядную станцию A рассчитывается посредством выражения (1). Частота внешней зарядки (частота внешней зарядки в хорошую погоду), Frf, в случае недождливой погоды в момент времени прибытия на зарядную станцию A рассчитывается посредством выражения (2). В дополнение, частота внешней зарядки (базовая частота внешней зарядки), Frb, на зарядной станции A, не связанная с погодой, рассчитывается посредством выражения (3). Базовая частота Frb внешней зарядки используется на этапе S61 по фиг. 10.
Frr=Nrc/(Nrc+Nrn) (1)
Frf=Nfc/(Nfc+Nfn) (2)
Frb=(Nrc+Nfc)/(Nrc+Nrn+Nfc+Nfn) (3)
Затем, на этапе S84, поправочное значение в случае дождливой погоды (поправочное значение для дождливой погоды), Cr, и поправочное значение в случае хорошей погоды (поправочное значение для хорошей погоды), Cf, рассчитываются на основании выражений (4) и (5). Поправочные значения Cr, Cf используются на этапе S64 по фиг. 10.
Cr=Frr/Frb (4)
Cf=Frf/Frb (5)
В примерах, проиллюстрированных на фиг. 10 и 11, целевое SOC изменяется в соответствии с изменениями состояния окружающей среды транспортного средства на основании погоды. Однако, управление расчетом целевого SOC, а также управление расчетом частоты внешней зарядки и поправочного значения могут выполняться таким же образом, как в примерах, проиллюстрированных на фиг. 10 и 11, в соответствии с изменениями состояния окружающей среды транспортного средства на основании параметров, иных чем погода.
Модификация второго варианта осуществления
Затем, со ссылкой на фиг. с 12 по 14, будет описана модификация второго варианта осуществления. В транспортном средстве 1 согласно настоящей модификации, в ситуации, где вероятность зарядки на зарядной станции ниже определенного уровня, целевое SOC единообразно устанавливается в относительно большое значение. Это дает возможность надежнее снижать вероятность, что ограничение выходной мощности двигатель-генераторов 12, 14 необходимо, когда транспортное средство вновь уезжает с зарядной станции.
Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления по управлению расчетом целевого SOC, которая рассчитывает целевое SOC на зарядной станции. Проиллюстрированная процедура управления приводится в исполнение с постоянными промежутками времени или всякий раз, когда обновляется частота внешней зарядки на каждой зарядной станции. Проиллюстрированная процедура управления приводится в исполнение для каждой зарядной станции.
Сначала, на этапе S91, состояние окружающей среды транспортного средства у зарядной станции, когда транспортное средство 1 прибывает на зарядную станцию, получается на основании выходных данных различных датчиков и устройств связи. Затем, на этапе S92, определяется, является или нет состояние окружающей среды транспортного средства, полученное на этапе S91, является состоянием с низкой частотой зарядки. Состояние с низкой частотой зарядки устанавливается со ссылкой на фиг. 13 и 14 в управлении расчетом частоты внешней зарядки, описанном позже. Например, когда случай дождливой погоды, или тому подобного, регистрируется в качестве состояния с низкой частотой зарядки, и погода, полученная на этапе S91, является дождливой погодой, определяется, что текущая погода соответствует состоянию с низкой частотой зарядки.
На этапе S92, когда определено, что состояние окружающей среды транспортного средства является состоянием с низкой частотой зарядки, обработка переходит на этап S93. На этапе S93, целевое SOC устанавливается на максимальное SOC, и процедура управления заканчивается. Здесь, максимальное SOC является значением, большим, чем максимальное значение целевого SOC, рассчитанное на этапе S95.
Когда на этапе S92 определено, что состояние окружающей среды транспортного средства не является состоянием с низкой частотой зарядки, обработка переходит на этап S94. На этапе S94, получается частота внешней зарядки. Например, частота внешней зарядки рассчитывается со ссылкой на фиг. 13 и 14 в управлении расчетом частоты внешней зарядки, описанном позже.
Затем, на этапе S95, целевое SOC для каждой зарядной станции, например, рассчитывается по карте, как проиллюстрировано на фиг. 6, на основании частоты внешней зарядки для каждой зарядной станции, собранной на этапе S94. Затем, процедура управления заканчивается.
Фиг. 13 и 14 являются блок-схемами последовательности операций способа, иллюстрирующими процедуру управления по управлению расчетом частоты внешней зарядки для расчета частоты внешней зарядки на определенной зарядной станции (зарядной станции A). Проиллюстрированная процедура управления приводится в исполнение с постоянными промежутками времени. Поскольку этапы со S101 по S114 по фиг. 13 аналогичны этапам с S71 по S84 по фиг. 11, их описание опущено.
На этапе S115, определяется, является или нет частота Frr внешней зарядки в дождливую погоду, рассчитанная на этапе S114, равной или меньшей, чем предопределенная опорная частота Fref (например, 50%). Когда определено, что частота Frr внешней зарядки при дождливой погоде равна или меньше опорной частоты, обработка переходит на этап S116. На этапе S116, определяется, является или нет частота Frf внешней зарядки в хорошую погоду, рассчитанная на этапе S114, равной или меньшей, чем предопределенная опорная частота Fref. Когда на этапе S116 определено, что частота Frf внешней зарядки в хорошую погоду является равной или меньшей, чем опорная частота Fref, обработка переходит на этап S117. На этапе S117, как дождливая погода, так и хорошая погода регистрируются в качестве состояния с низкой частотой зарядки, и процедура управления заканчивается.
Когда на этапе S116 определено, что частота Frf внешней зарядки в хорошую погоду выше опорной частоты Fref, обработка переходит на этап S118. На этапе S118, дождливая погода регистрируется в качестве состояния с низкой частотой зарядки. Затем, на этапе S119, частота Frf внешней зарядки в хорошую погоду устанавливается в качестве частоты Fr внешней зарядки на зарядной станции, и процедура управления заканчивается.
Когда на этапе S115 определено, что частота Frr внешней зарядки в дождливую погоду выше предопределенной опорной частоты Fref, обработка переходит на этап S120. На этапе S120, определяется, является или нет частота Frf внешней зарядки в хорошую погоду равной или меньшей, чем предопределенная опорная частота Fref. На этапе S116, когда определено, что частота Frf внешней зарядки в хорошую погоду равна или меньше опорной частоты Fref, обработка переходит на этап S121. На этапе S121, хорошая погода регистрируется в качестве состояния с низкой частотой зарядки. Затем, на этапе S122, частота Frr внешней зарядки в дождливую погоду устанавливается в качестве частоты Fr внешней зарядки на зарядной станции, и процедура управления заканчивается.
Когда на этапе S120 определено, что частота Frf внешней зарядки в хорошую погоду выше опорной частоты Fref, обработка переходит на этап S123. На этапе S123, регистрация дождливой погоды и хорошей погоды в качестве состояния с низкой частотой зарядки отменяется. Затем, на этапе S124, базовая частота Fb внешней зарядки устанавливается в качестве частоты Fr внешней зарядки на зарядной станции, и процедура управления заканчивается.
Третий вариант осуществления
Далее приведено описание транспортного средства с гибридным приводом согласно третьему варианту осуществления. Конфигурация и управление транспортным средством 1 с гибридным приводом согласно третьему варианту осуществления по существу аналогичны конфигурации и управлению транспортного средства 1 с гибридным приводом согласно первому варианту осуществления и второму варианту осуществления. Соответственно, главным образом, ниже будет описано отличие от транспортного средства с гибридным приводом согласно первому варианту осуществления и второму варианту осуществления.
В варианте осуществления, вероятность зарядки оценивается на основании предыстории зарядки на каждой зарядной станции. Однако, как правило ожидается, что вероятность зарядки в дождливую погоду ниже, чем вероятность зарядки в хорошую погоду. Соответственно, в настоящем варианте осуществления, вероятность зарядки оценивается на основании погоды в текущем местоположении или на каждой зарядной станции в текущий момент времени или в момент времени, когда ожидается, что транспортное средство 1 должно прибыть на зарядную станцию, независимо от предыстории зарядки на каждой зарядной станции.
Более точно, блок установки целевого SOC получает погоду на зарядной станции в текущий момент времени и, например, устанавливает целевое SOC на основании полученной погоды. В этом случае, например, целевое SOC устанавливается более высоким в порядке хорошей погоды, дождливой погоды и снежной погоды.
В настоящем варианте осуществления блок 43 установки целевого SOC устанавливает целевое SOC на основании погоды. Однако, блок 43 установки целевого SOC рассчитывает поправочное значение на основании погоды и может, на основании поправочного значения, корректировать целевое SOC, рассчитанное на основании способов в первом варианте осуществления и втором варианте осуществления.
Фиг. 15 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления по управлению расчетом целевого SOC в настоящем варианте осуществления. Проиллюстрированная процедура управления приводится в исполнение с постоянными промежутками времени или всякий раз, когда обновляется частота внешней зарядки на каждой зарядной станции. Проиллюстрированная процедура управления приводится в исполнение для каждой зарядной станции.
Сначала, на этапе S131, собираются данные о погоде на зарядной станции. Затем, на этапе S132, определяется, является или нет погода, полученная на этапе S131, хорошей погодой. Когда определено, что погода является хорошей погодой, обработка переходит на этап S133. На этапе S133, целевое SOC устанавливается в SOC1, и процедура управления заканчивается. Между тем, когда на этапе S132 определено, что погода не является хорошей погодой, обработка переходит на этап S134. На этапе S134, целевое SOC устанавливается в SOC2 (значение, большее, чем SOC1), и процедура управления заканчивается.
Четвертый вариант осуществления
Далее, со ссылкой на фиг. 16, приведено описание транспортного средства 1 с гибридным приводом согласно четвертому варианту осуществления. Конфигурация и управление транспортным средством 1 с гибридным приводом согласно четвертому варианту осуществления по существу аналогичны конфигурации и управлению транспортного средства 1 с гибридным приводом согласно вариантам осуществления с первого по третий. Соответственно, главным образом, будет описано отличие от транспортного средства с гибридным приводом согласно вариантам осуществления с первого по третий.
Как проиллюстрировано на фиг. 16, транспортное средство 1 в настоящем варианте осуществления включает в себя двигатель 10 внутреннего сгорания, электрогенератор 12B, аккумуляторную батарею 20, PCU 18, электродвигатель 14B и бортовой разъем 22 транспортного средства. В транспортном средстве 1 по настоящему варианту осуществления, двигатель 10 внутреннего сгорания механически связан с электрогенератором 12B, будучи несвязанным с ведущим валом 32. Поэтому, транспортное средство 1 также сконфигурировано так, чтобы электроэнергия, вырабатываемая выходной мощностью двигателя 10 внутреннего сгорания, могла использоваться для зарядки аккумуляторной батареи 20. В частности, расходуемая на движение мощность двигателя 10 внутреннего сгорания используется главным образом для зарядки аккумуляторной батареи 20. Аккумуляторная батарея 20 электрически присоединена к электродвигателю 14B через PCU 18. Электродвигатель 14B возбуждается электроэнергией, подаваемой из аккумуляторной батареи 20. В дополнение, транспортное средство 1 в настоящем варианте осуществления также сконфигурировано так, чтобы аккумуляторная батарея могла заряжаться от внешнего источника 70 питания через бортовой разъем 22 транспортного средства.
В таким образом сконфигурированном транспортном средстве 1, целевое SOC устанавливается и, в конечном счете, SOC переключения также устанавливается посредством способов, раскрытых в вариантах осуществления с первого по третий.
В вышеприведенном описании, транспортное средство с гибридным приводом, сконфигурированное как проиллюстрировано на фиг. 1, и транспортное средство с гибридным приводом, сконфигурированное как проиллюстрировано на фиг. 16, используются в качестве транспортного средства 1 с гибридным приводом. Однако, не ограничиваясь транспортными средствами с гибридным приводом, сконфигурированными таким образом, транспортное средство 1 с гибридным приводом может быть транспортным средством с гибридным приводом, сконфигурированным иным образом.
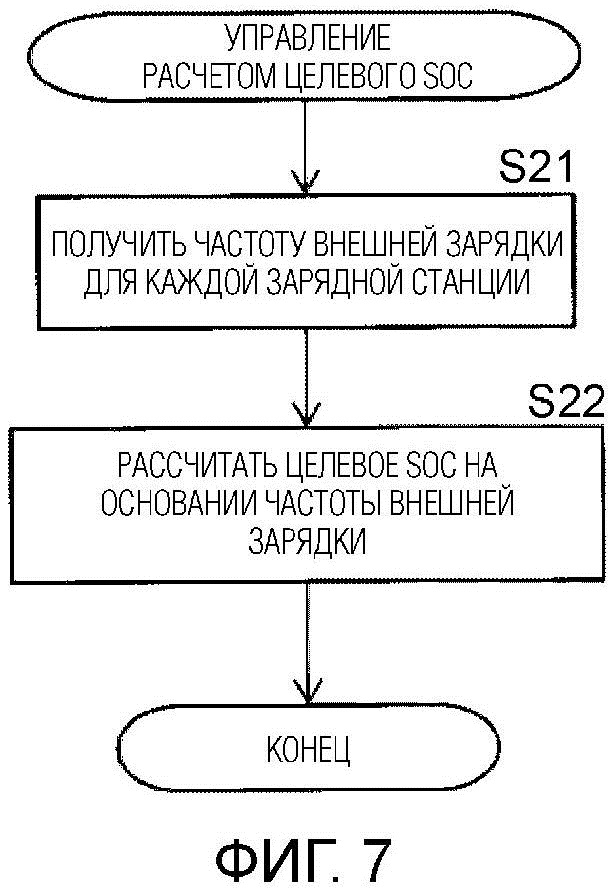
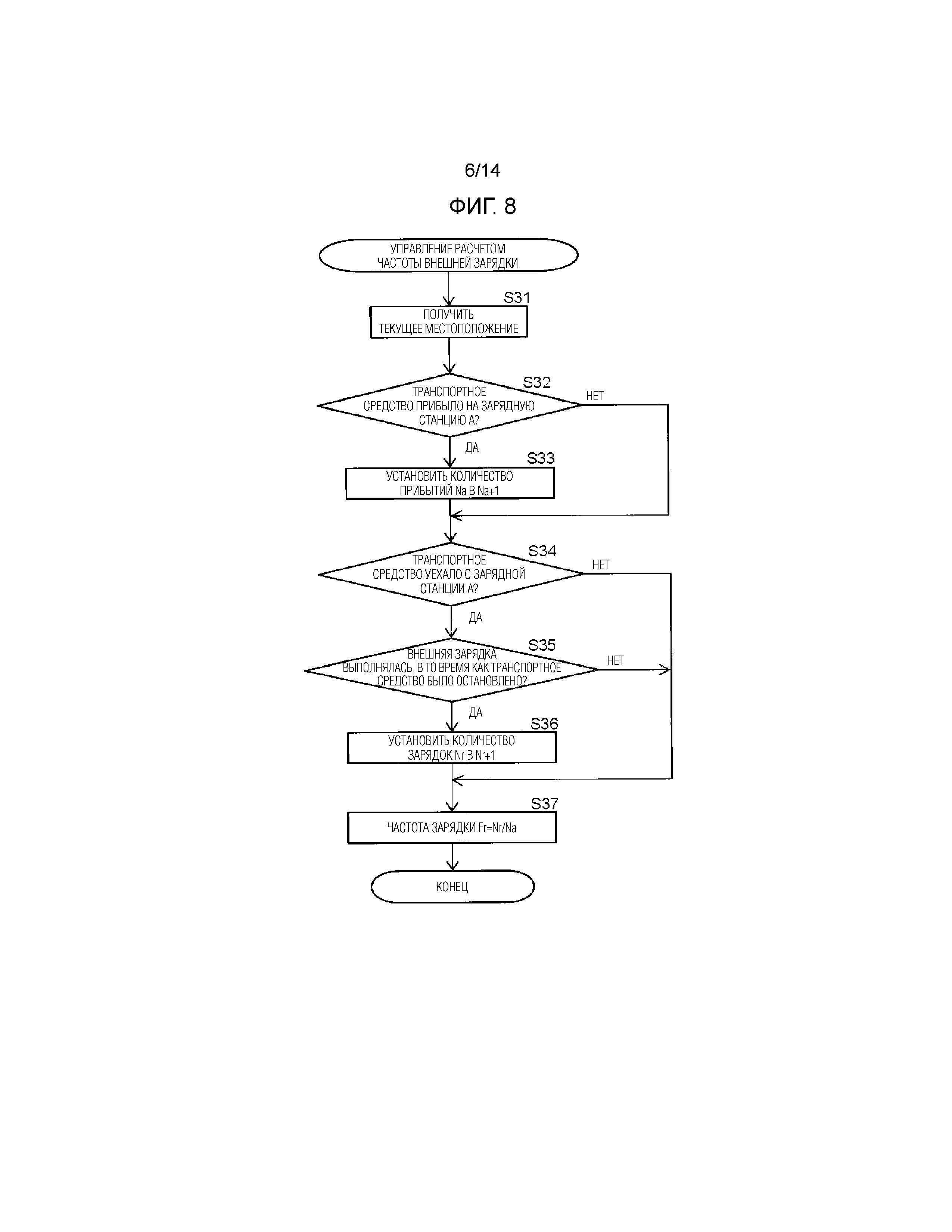
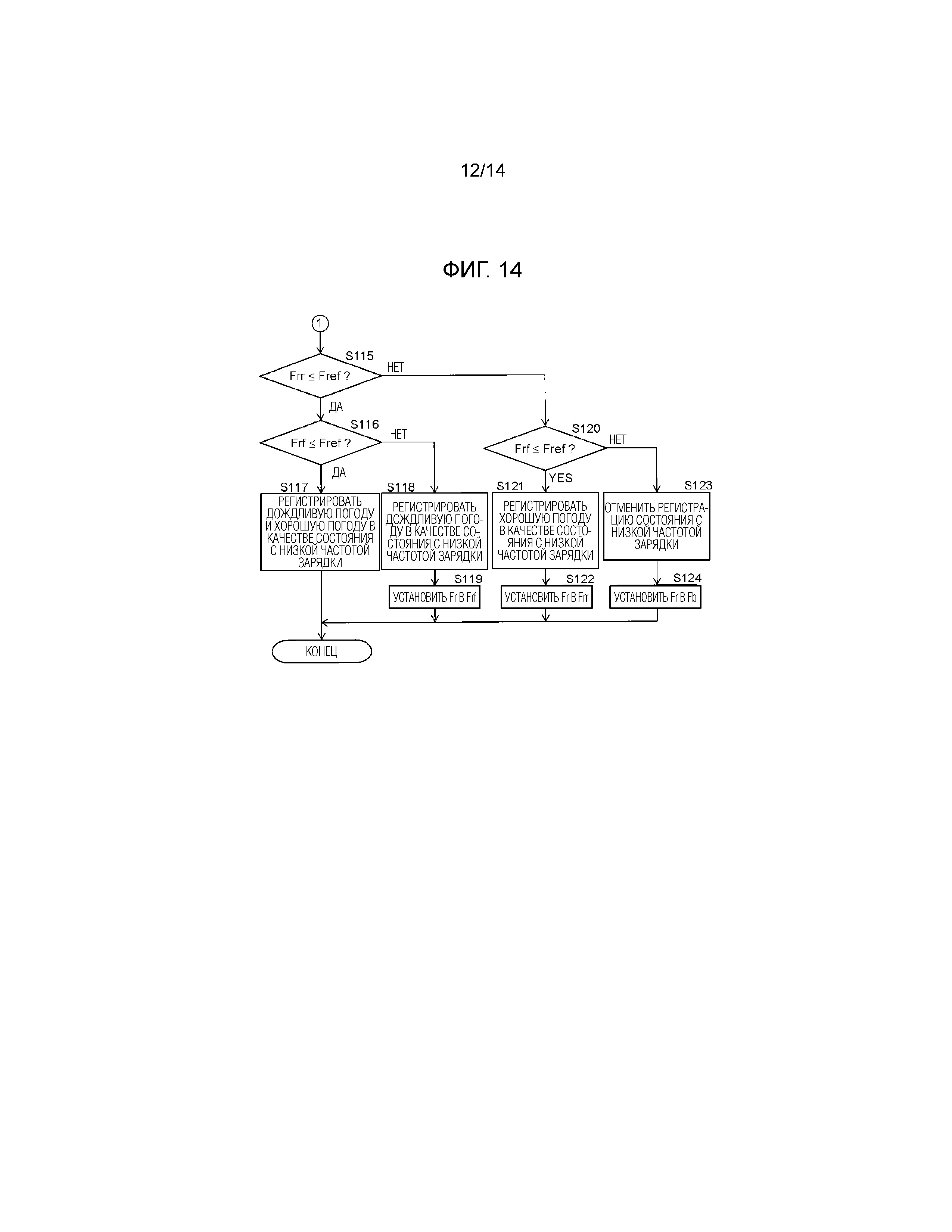
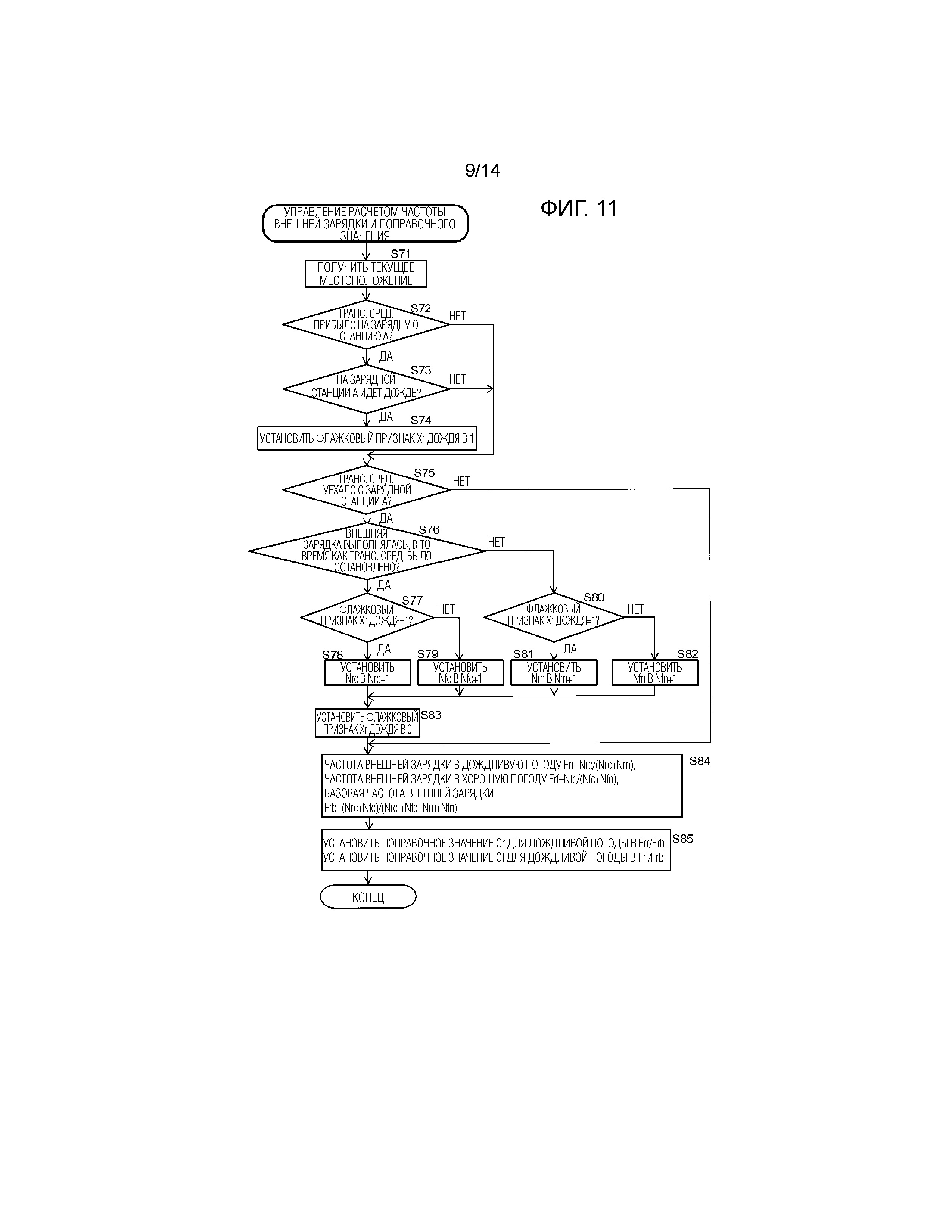
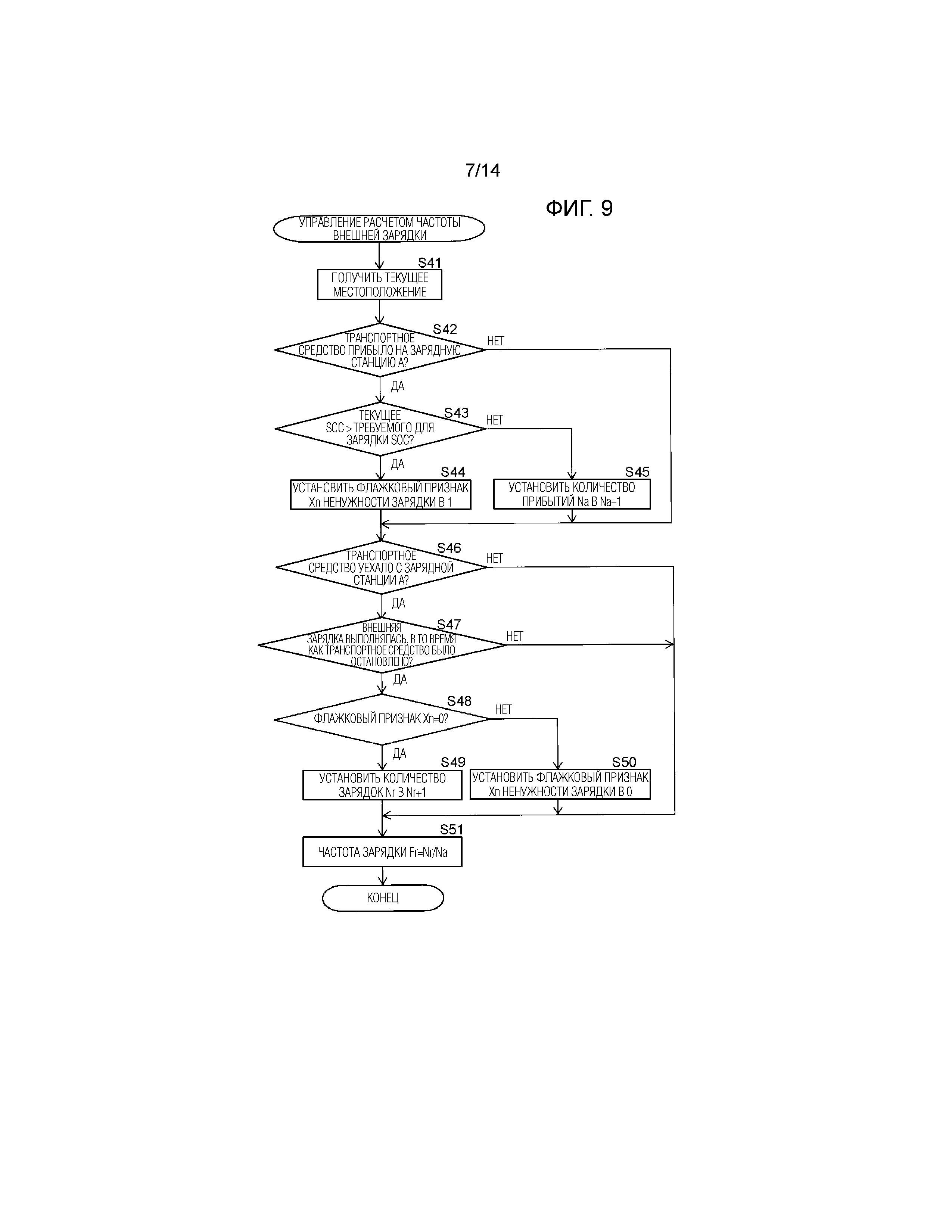
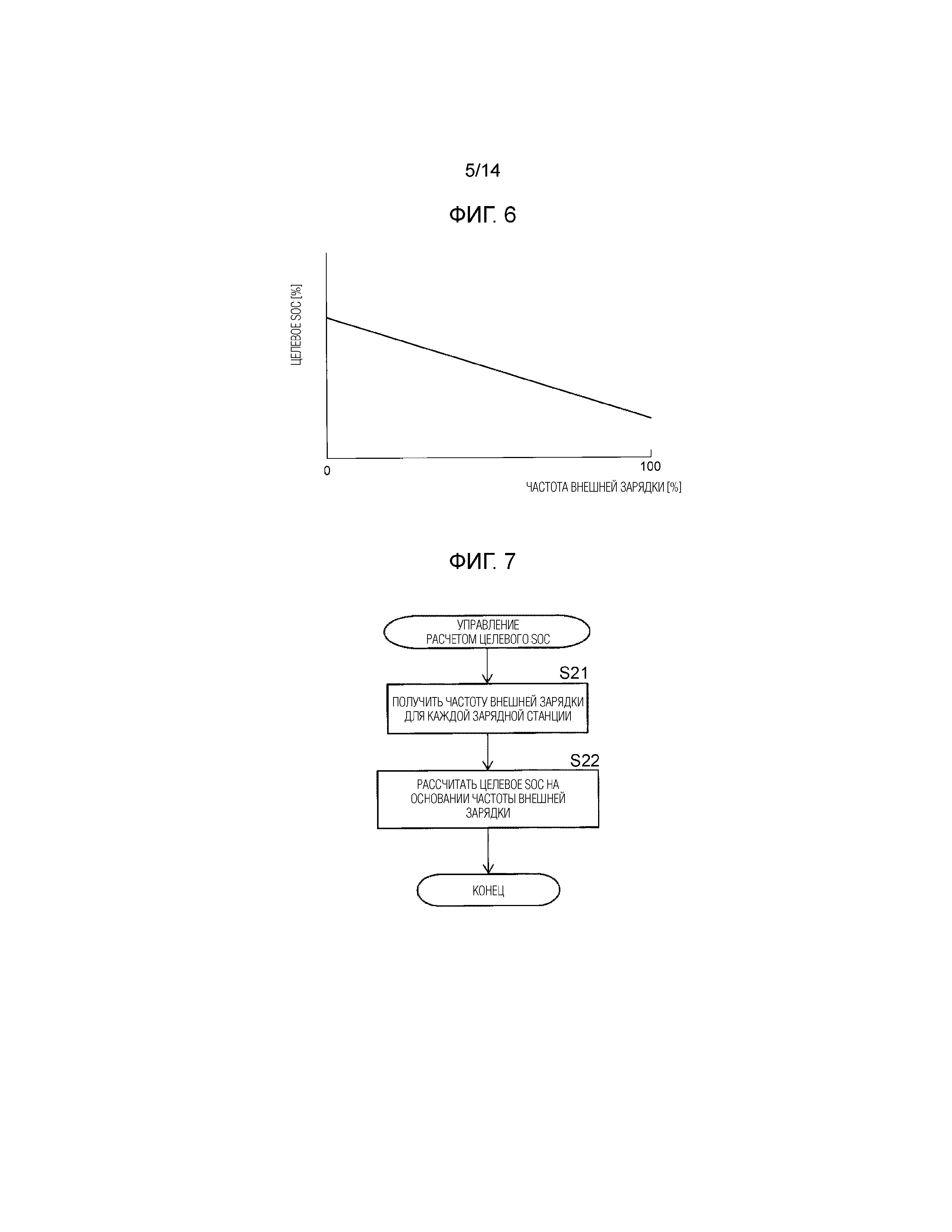
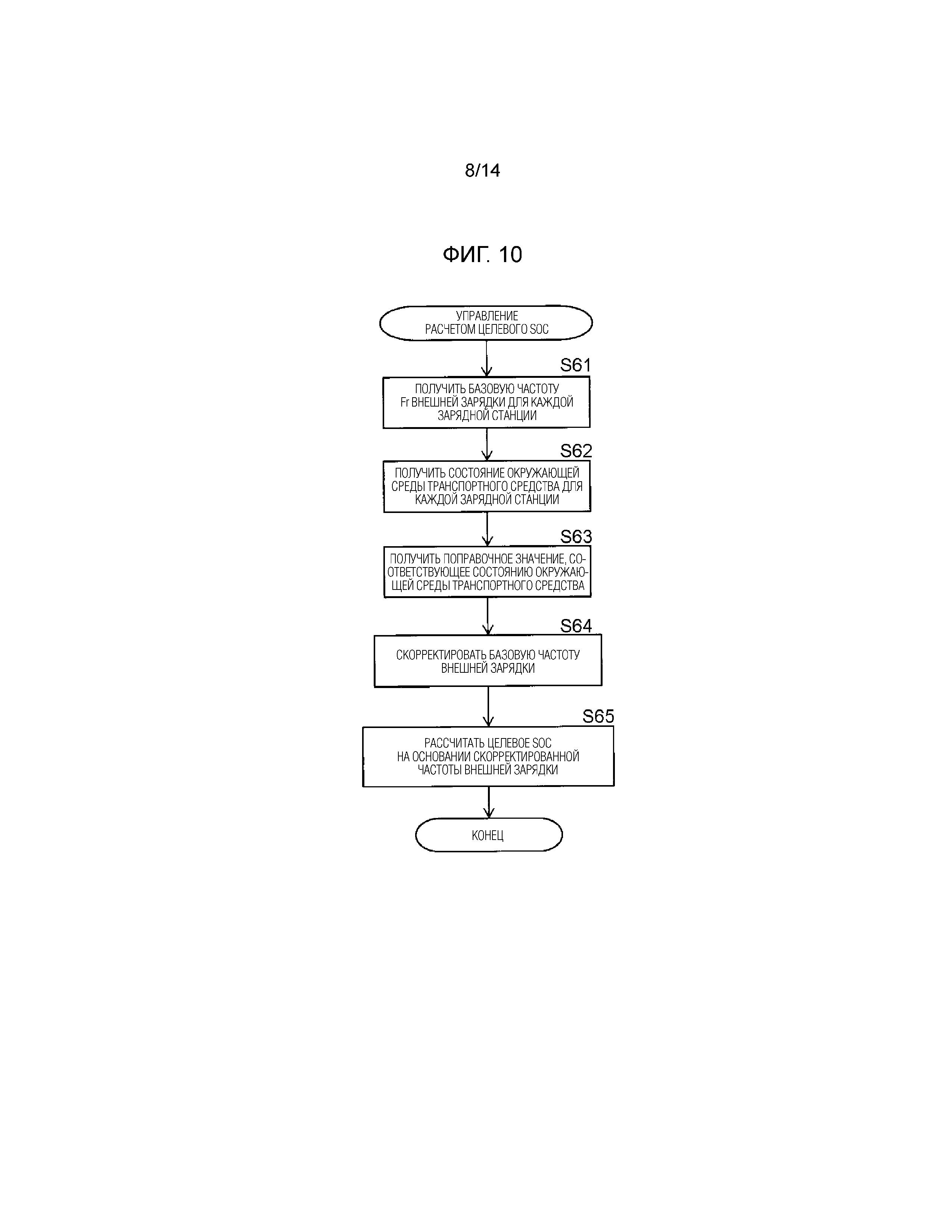
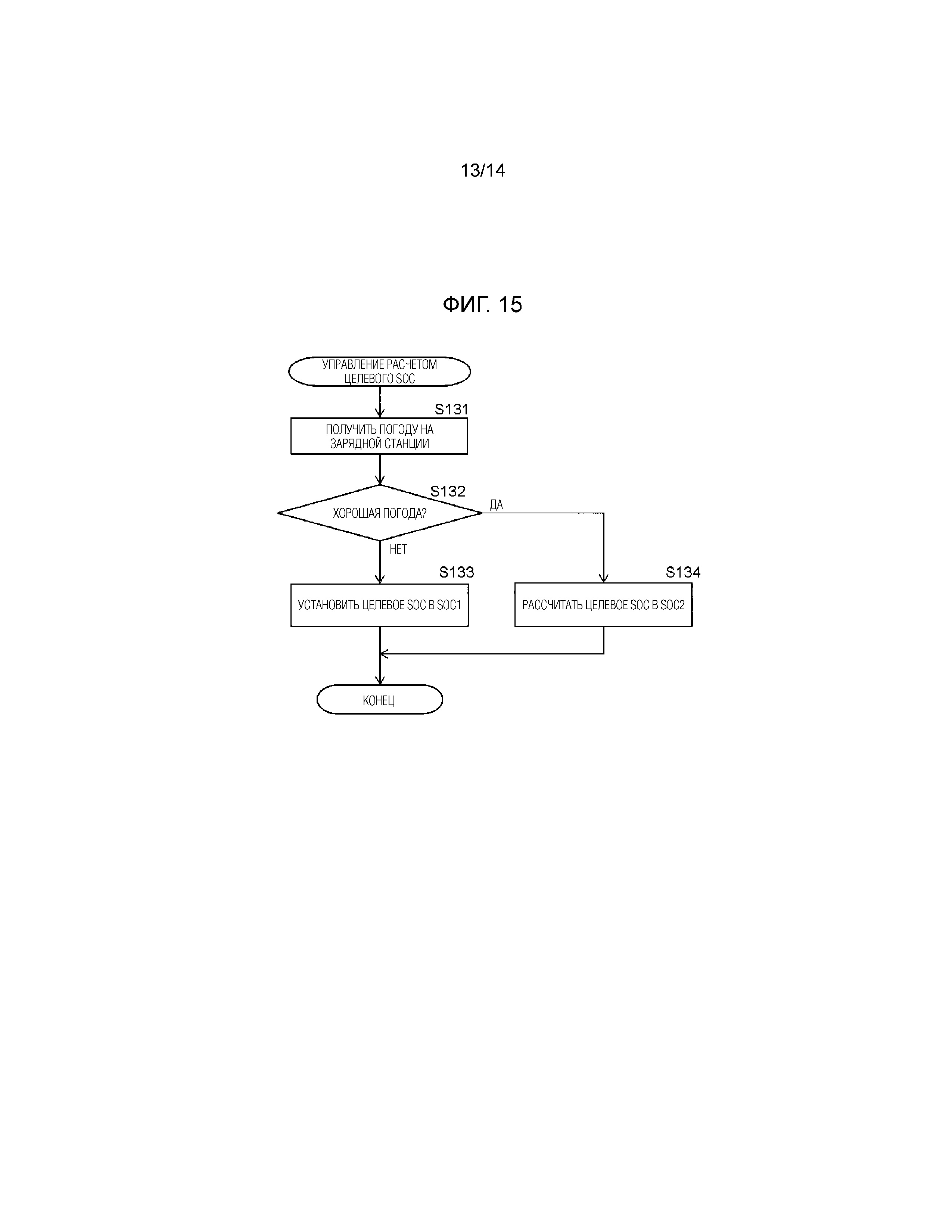
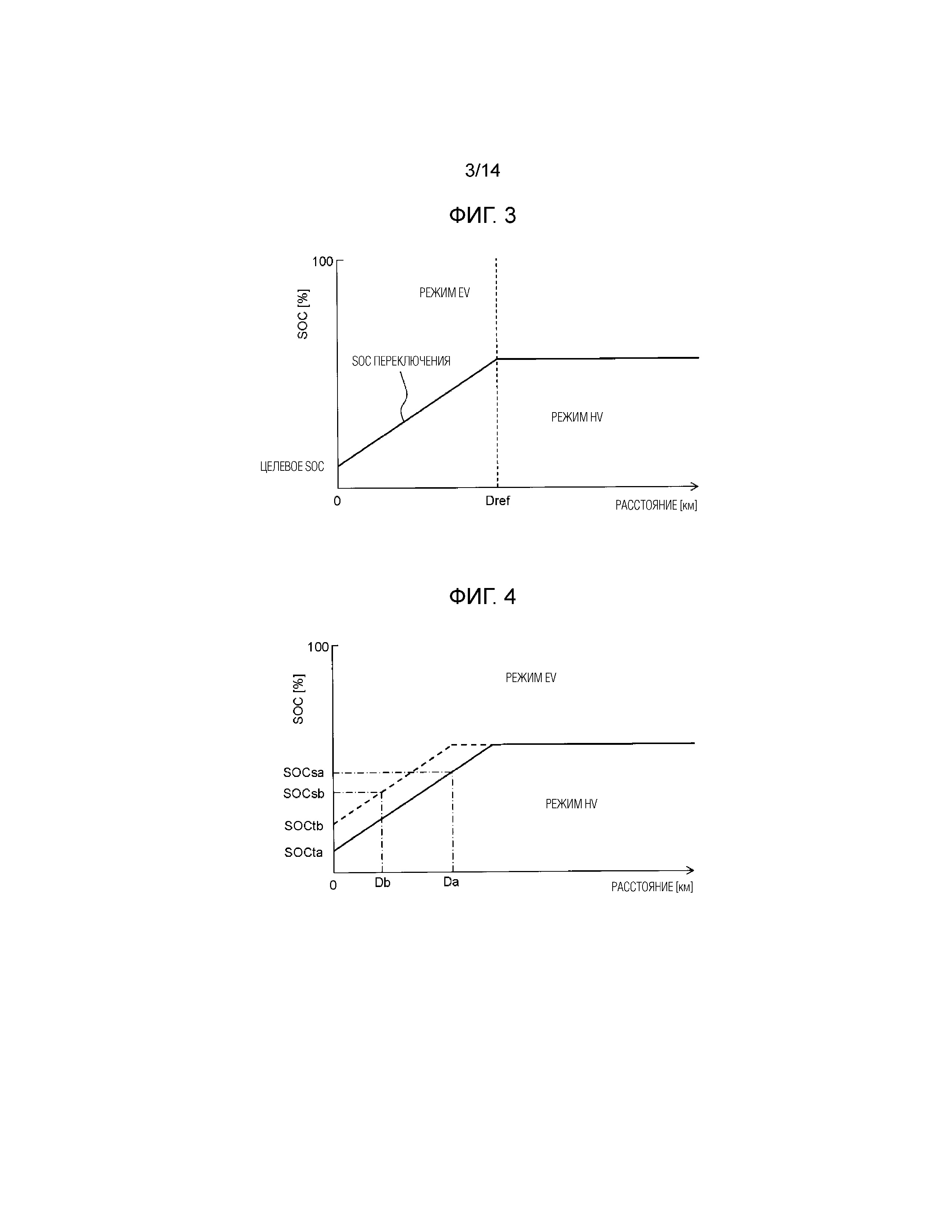
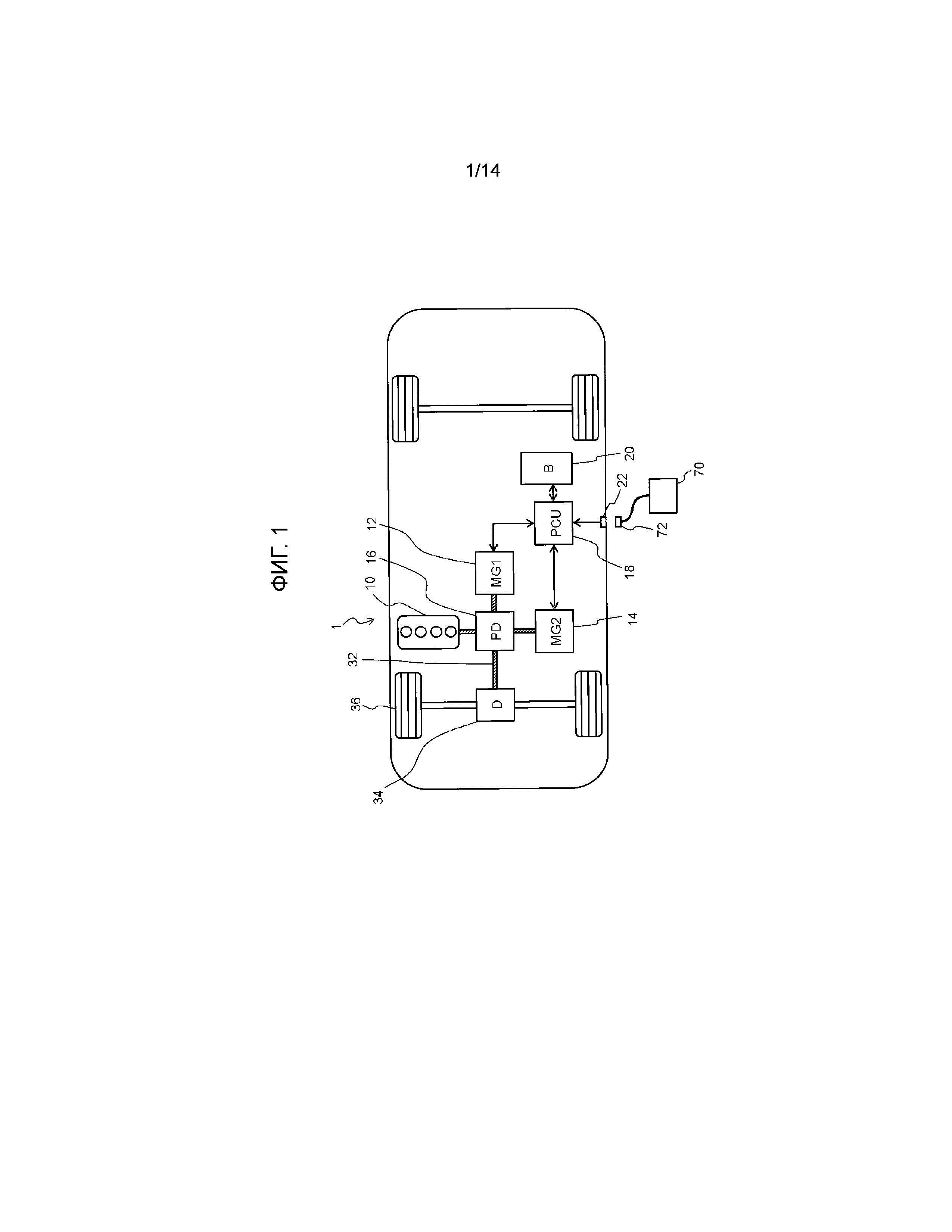
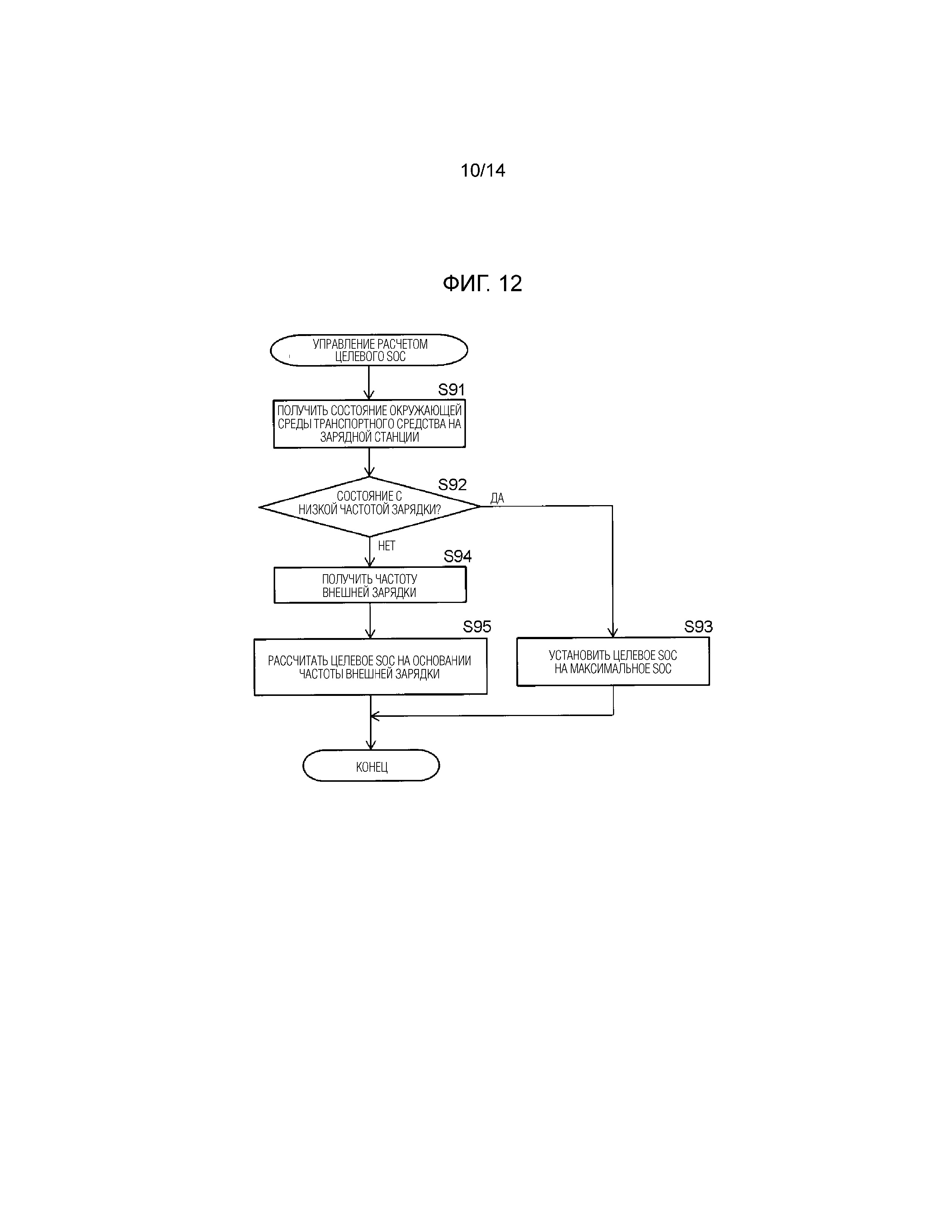
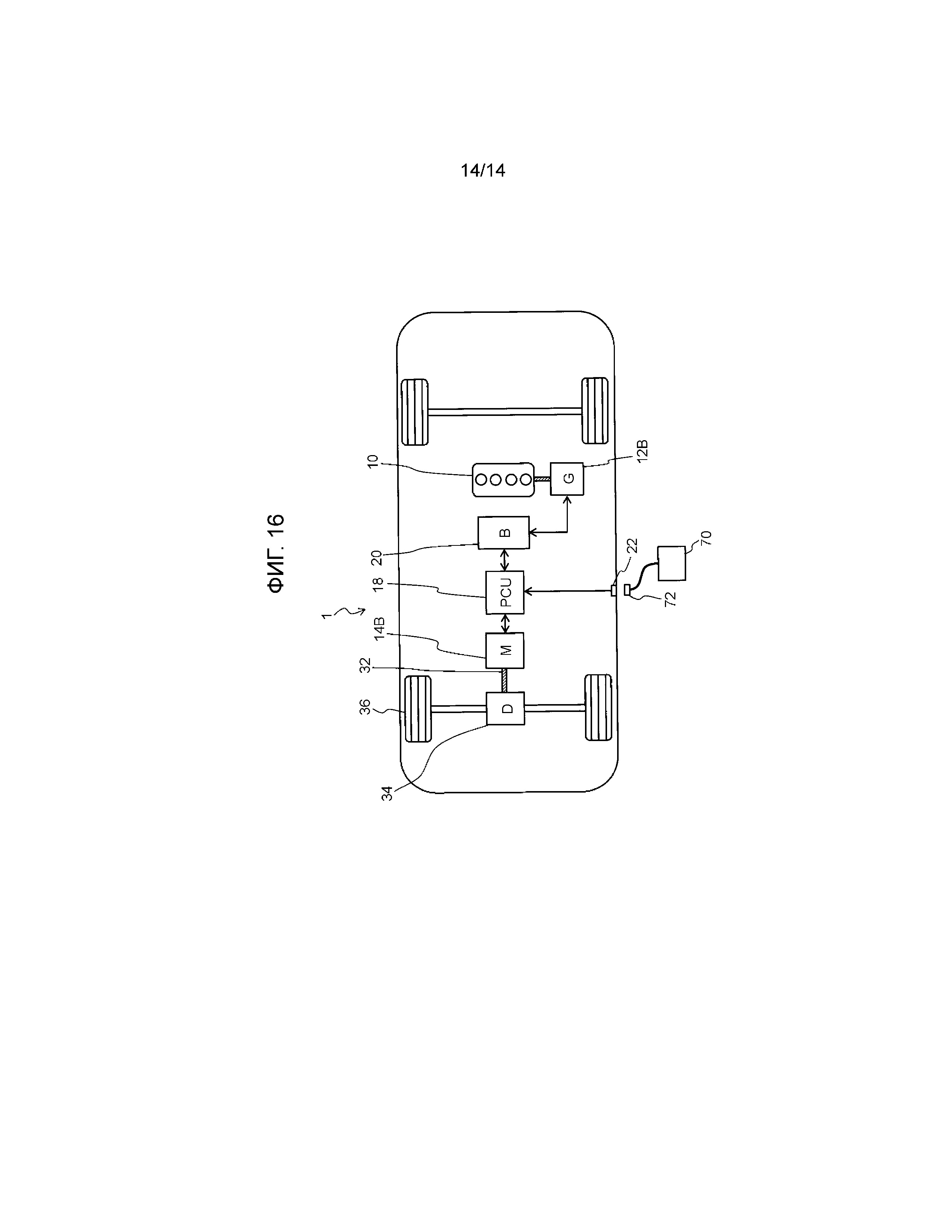
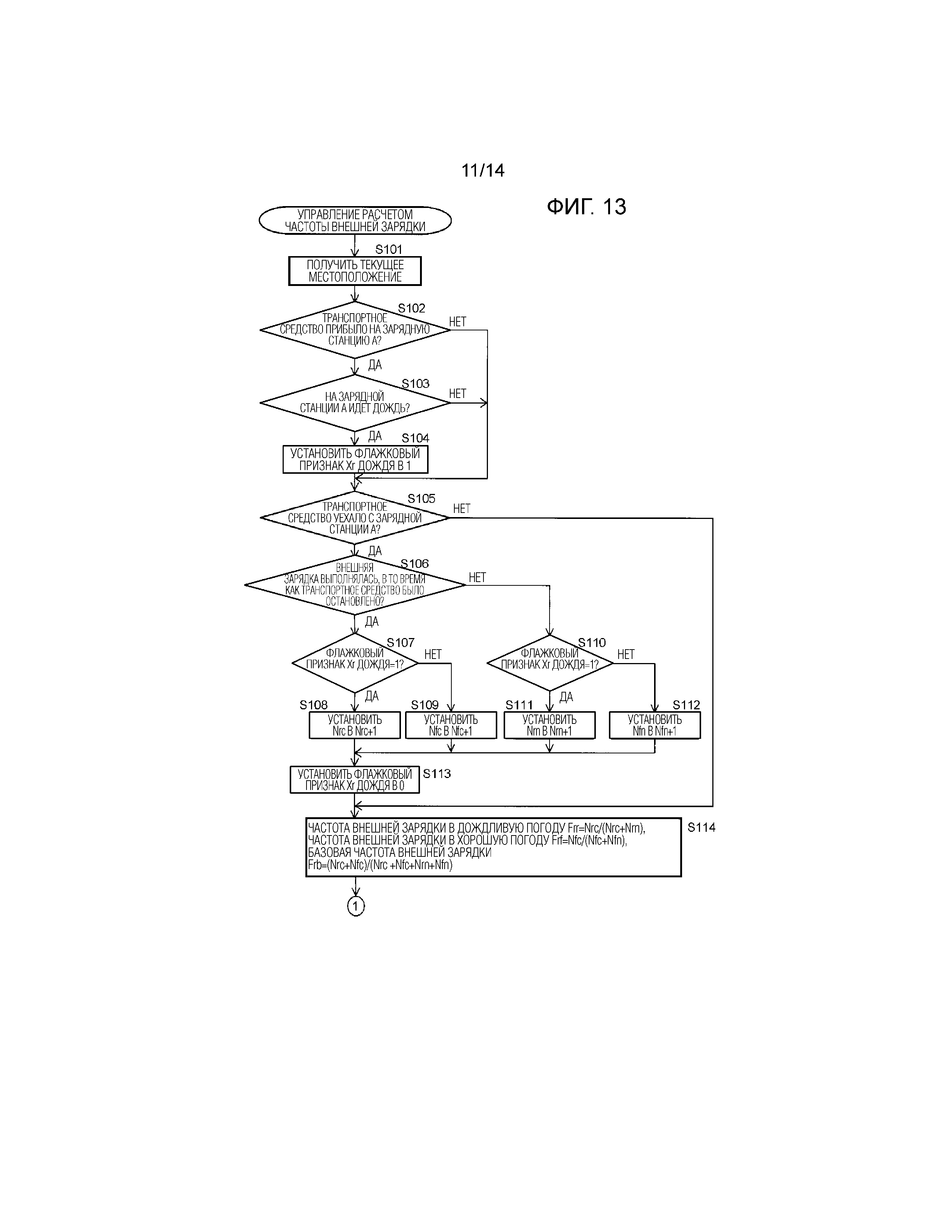
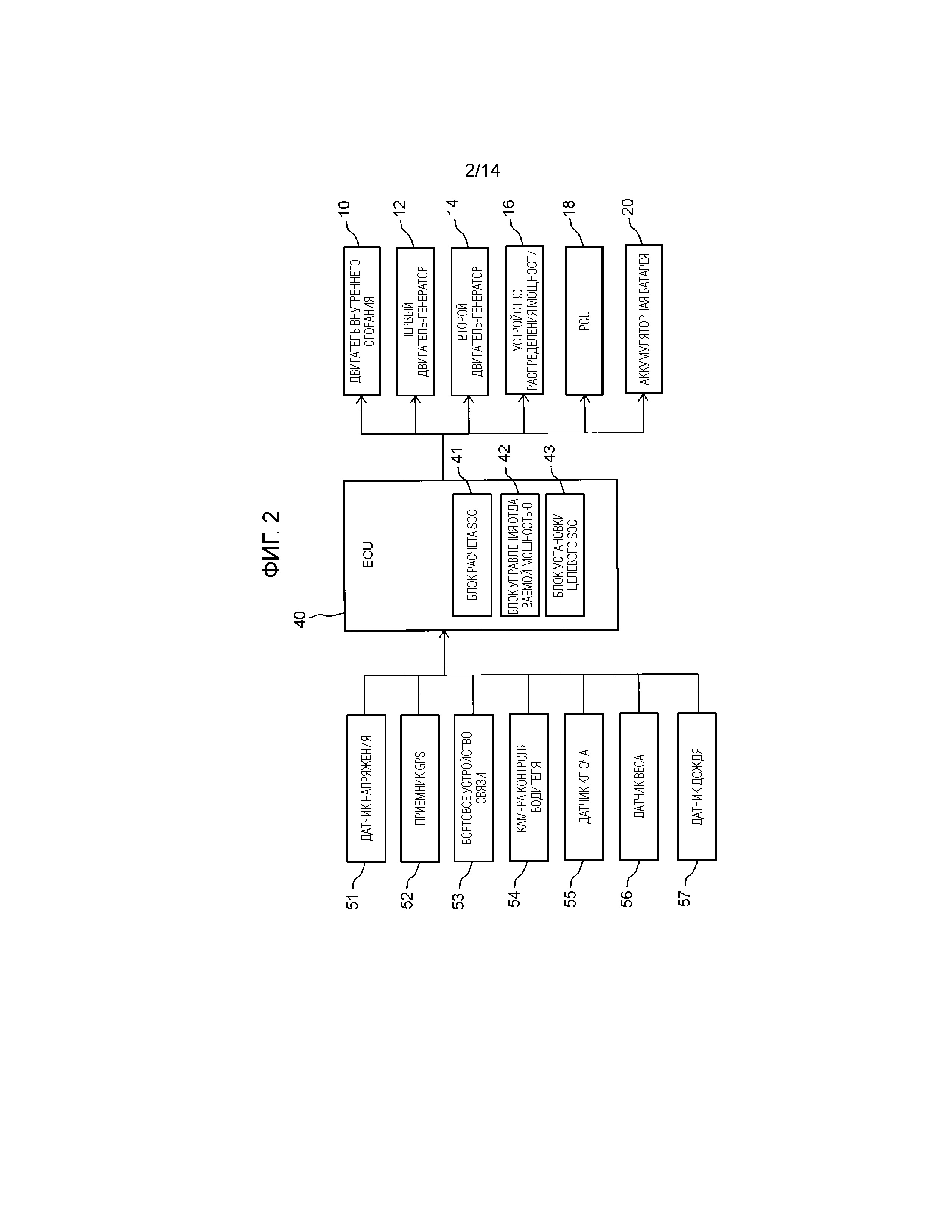
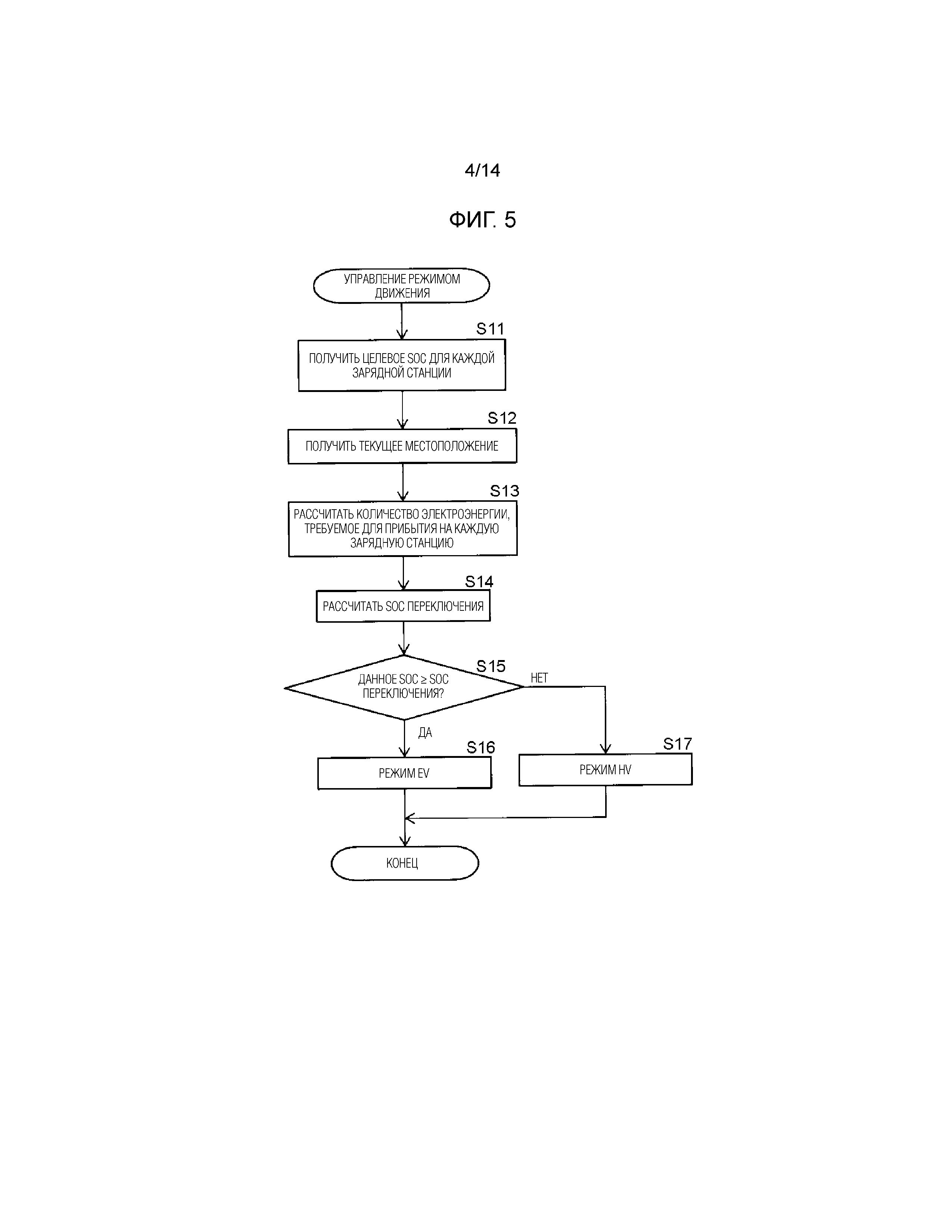
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство для наблюдения биологических объектов
Устройство обработки сигналов для устройства, предназначенного для биологических наблюдений
Устройство для биологических наблюдений

