Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ ДЛЯ ИСПЫТАНИЯ ИНЕРЦИАЛЬНОГО ДАТЧИКА
Вид РИД
Изобретение
Настоящее изобретение относится к устройству для испытания инерциального датчика, в частности датчика ускорения и/или датчика скорости вращения, предназначенного для транспортного средства и имеющего по меньшей мере две точки крепления, содержащему по меньшей мере один первый колебательный элемент, к которому прикрепляется инерциальный датчик, и по меньшей мере один первый модуль возбуждения, соотнесенный с первым колебательным элементом для сообщения первому колебательному элементу ускорения по меньшей мере в одном направлении.
Кроме того, настоящее изобретение относится к способу испытания инерциального датчика, в частности датчика ускорения и/или датчика скорости вращения, предназначенного для транспортного средства и имеющего по меньшей мере две точки крепления, характеризующемуся тем, что инерциальный датчик прикрепляют по меньшей мере к одному первому колебательному элементу, которому сообщают ускорение по меньшей мере в одном направлении посредством по меньшей мере одного первого модуля возбуждения.
Устройства и способы описанного выше типа известны из уровня техники. Для испытания и регулирования инерциальных датчиков, предназначенных для транспортных средств, эти датчики часто исследуют на отдельных испытательных стендах, чтобы в стационарных условиях определить, какое влияние оказывают на инерциальный датчик разные ускорения. Это позволяет выполнить калибровку инерциального датчика таким образом, что обеспечиваются регистрация требуемых ускорений и компенсация или игнорирование прочих возмущающих ускорений. С этой целью в известных устройствах инерциальный датчик закрепляют на колебательном элементе с большой массой, например на металлической болванке и т.п., которому сообщается ускорение по меньшей мере в одном направлении посредством по меньшей мере одного модуля возбуждения. При этом значения сигналов, регистрируемые или измеряемые посредством инерциального датчика и относящиеся, например, к ускорению или скорости вращения, сохраняются в памяти и соответственно сопоставляются с ожидаемыми значениями ускорения с целью калибровки этого датчика.
Предлагаемое в изобретении устройство для испытания инерциального датчика, предназначенного для транспортного средства и имеющего по меньшей мере две точки крепления, содержит по меньшей мере один первый колебательный элемент, к которому прикрепляется инерциальный датчик, и по меньшей мере один первый модуль возбуждения, соотнесенный с первым колебательным элементом для сообщения первому колебательному элементу ускорения по меньшей мере в одном направлении. На расстоянии от первого колебательного элемента предусмотрен по меньшей мере один второй колебательный элемент, с которым для сообщения ему ускорения соотнесен по меньшей мере один второй модуль возбуждения, причем инерциальный датчик прикрепляется первой точкой крепления к первому колебательному элементу, а второй точкой крепления - ко второму колебательному элементу.
Предлагаемый в изобретении способ испытания инерциального датчика, предназначенного для транспортного средства и имеющего по меньшей мере две точки крепления, характеризуется тем, что инерциальный датчик прикрепляют по меньшей мере к одному первому колебательному элементу, которому сообщают ускорение по меньшей мере в одном направлении посредством по меньшей мере одного первого модуля возбуждения. Инерциальный датчик прикрепляют первой точкой крепления к первому колебательному элементу, а второй точкой крепления - ко второму колебательному элементу, расположенному на расстоянии от первого колебательного элемента. Второму колебательному элементу сообщают ускорение по меньшей мере в одном направлении посредством по меньшей мере одного второго модуля возбуждения.
В предлагаемом в изобретении устройстве с каждым колебательным элементом соотнесено три модуля возбуждения, выполненных таким образом, чтобы независимо друг от друга сообщать соответствующему колебательному элементу ускорение в разных направлениях. В соответствии с предлагаемым в изобретении способом каждому колебательному элементу сообщают ускорение в разных направлениях посредством трех модулей возбуждения, приводимых в действие независимо друг от друга.
Устройство и способ, предлагаемые в изобретении, обладают тем преимуществом, что инерциальный датчик может испытывать разное ускорение в разных точках. Тем самым обеспечивается возможность еще более точного воспроизведения с помощью данного устройства реального случая применения в транспортном средстве. Инерциальный датчик часто крепится на различных элементах кузова автомобиля, которые могут также совершать колебания друг относительно друга. Благодаря конструктивным преимуществам предлагаемого устройства этот режим воспроизводится посредством того, что инерциальный датчик может испытывать разное ускорение в двух разных точках. Для этого в изобретении предусмотрено использование на расстоянии от первого колебательного элемента по меньшей мере одного второго колебательного элемента, с которым соотнесен предназначенный для сообщения ему ускорения по меньшей мере один второй модуль возбуждения, а также предусмотрено, что инерциальный датчик может крепиться /крепится первой точкой крепления к первому колебательному элементу, а второй точкой крепления - ко второму колебательному элементу. Тем самым обеспечивается возможность сообщения ускорения инерциальному датчику в двух точках крепления, или монтажа, на разных колебательных элементах, которые, в частности, установлены на опорах с возможностью колебаний независимо друг от друга. Этим обеспечивается, например, возможность компенсации (посредством регистрации и аналитической обработки сигналов ускорения) резонансных колебаний второго колебательного элемента при возбуждении первого колебательного элемента.
Вследствие того, что с каждым колебательным элементом соотнесено три модуля возбуждения, расположенных таким образом, чтобы сообщать соответствующему колебательному элементу ускорение в трех разных направлениях, обеспечивается возбуждение каждого колебательного элемента (или сообщение ему ускорения) по трем координатным осям, благодаря чему в целом достигается 2×3D-ускорение и, соответственно, выполняется испытание инерциального датчика.
В особенно предпочтительном варианте осуществления изобретения направление возбуждения первого колебательного элемента соотнесенным с ним модулем возбуждения в каждом случае соответствует направлению возбуждения второго колебательного элемента соотнесенным с ним модулем возбуждения. Тем самым обеспечивается возможность сообщения обоим колебательным элементам ускорения в одном и том же направлении возбуждения посредством соответствующих модулей возбуждения. В частности, предусмотрено, что модуль возбуждения первого колебательного элемента и модуль возбуждения второго колебательного элемента ориентированы/расположены таким образом, что этим колебательным элементам можно сообщить ускорение в трех одинаковых направлениях в пространстве. Это дает благоприятную возможность аналитической обработки сигналов ускорения инерциального датчика.
В предпочтительном варианте осуществления изобретения каждый из модулей возбуждения содержит по меньшей мере один исполнительный пьезоэлемент, в частности несколько исполнительных пьезоэлементов. В частности, исполнительные пьезоэлементы могут быть объединены в пьезопакеты, чтобы совместно сообщать соответствующим колебательным элементам ускорение в требуемом направлении. Используя пьезопакеты, можно получить высокие ускорения и значительные величины смещения, или колебания, колебательных элементов.
Целесообразно, чтобы каждый модуль возбуждения содержал по меньшей мере один регулирующий датчик, осуществляющий регулирование исполнительных элементов, в частности исполнительных пьезоэлементов, в зависимости от требуемого ускорения и, соответственно, колебательного элемента и/или инерциального датчика. Тем самым обеспечивается возбуждение инерциального датчика до получения фактически требуемого ускорения с благоприятной возможностью аналитической обработки зарегистрированных сигналов этого датчика.
Как указано выше, при осуществлении предлагаемого в изобретении способа каждому колебательному элементу сообщают ускорение в разных направлениях посредством трех модулей возбуждения. В частности, обоим колебательным элементам может сообщаться/сообщается ускорение в одних и тех же направлениях. Кроме того, модули возбуждения расположены относительно каждого колебательного элемента таким образом, что в каждом случае модули возбуждения первого и второго колебательных элементов действуют в одном и том же направлении.
Далее, в предпочтительном варианте осуществления изобретения для исследования поведения инерциального датчика, подвергаемого испытанию, колебательным элементам сообщают ускорение в разных или одних и тех же направлениях в пространстве одновременно или поочередно.
В особенно предпочтительном варианте осуществления изобретения в зависимости от приведения в действие модулей возбуждения и создаваемых ими ускорений колебательных элементов составляют передаточную матрицу, с помощью которой компенсируют возмущающие ускорения. Ускорение, созданное модулем возбуждения в одном направлении, может также приводить к одновременному ускорению в другом направлении, рассматриваемому как возмущающее ускорение. Во избежание появления таких возмущающих ускорений в процессе исследования инерциального датчика можно предусмотреть передаточную матрицу, компенсирующую подобные отклонения, или возмущающие ускорения.
Настоящее изобретение более подробно описывается ниже с помощью чертежей, на которых показано:
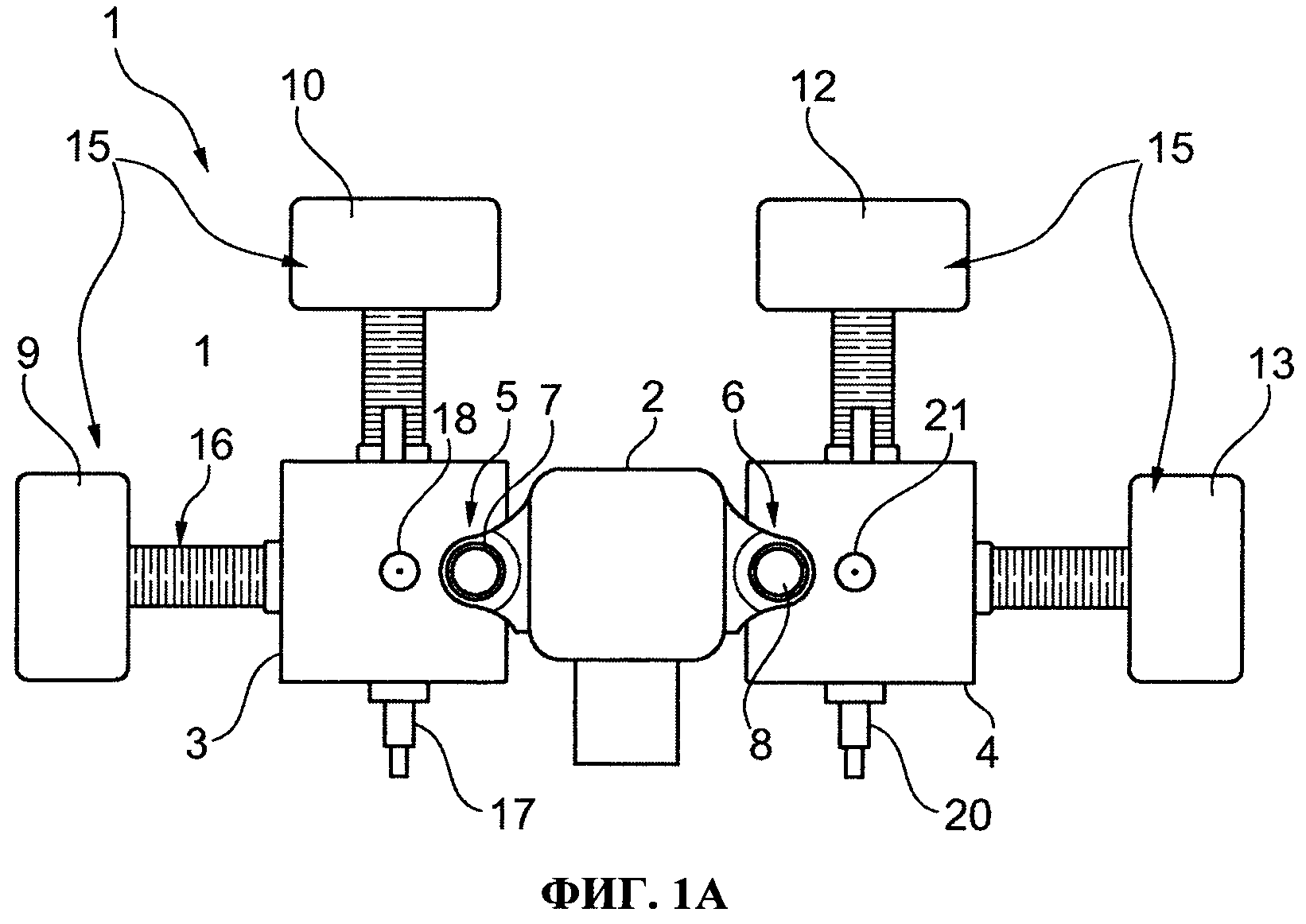
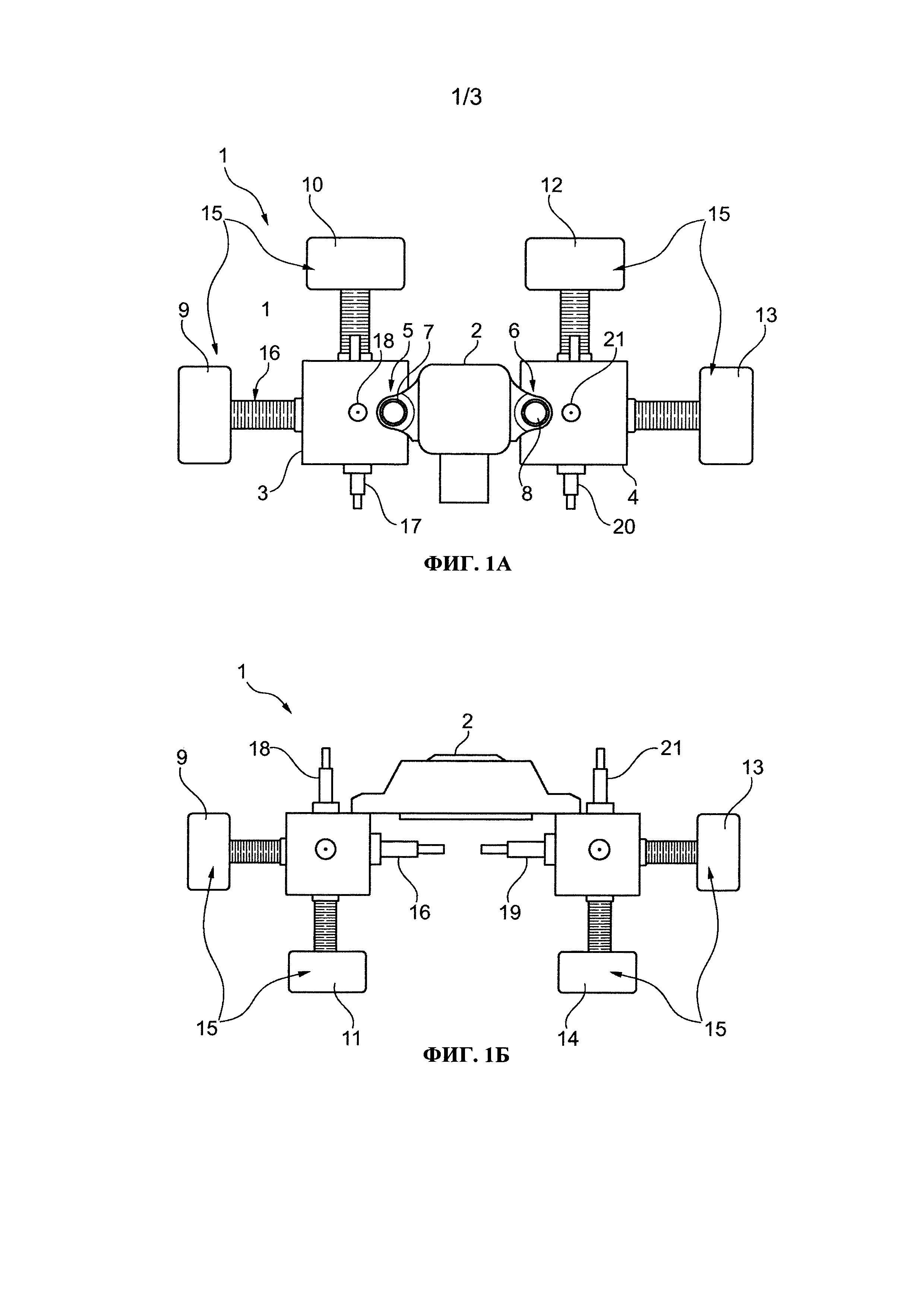
на фиг. 1А и 1Б - вид в разных проекциях устройства для испытания инерциального датчика,
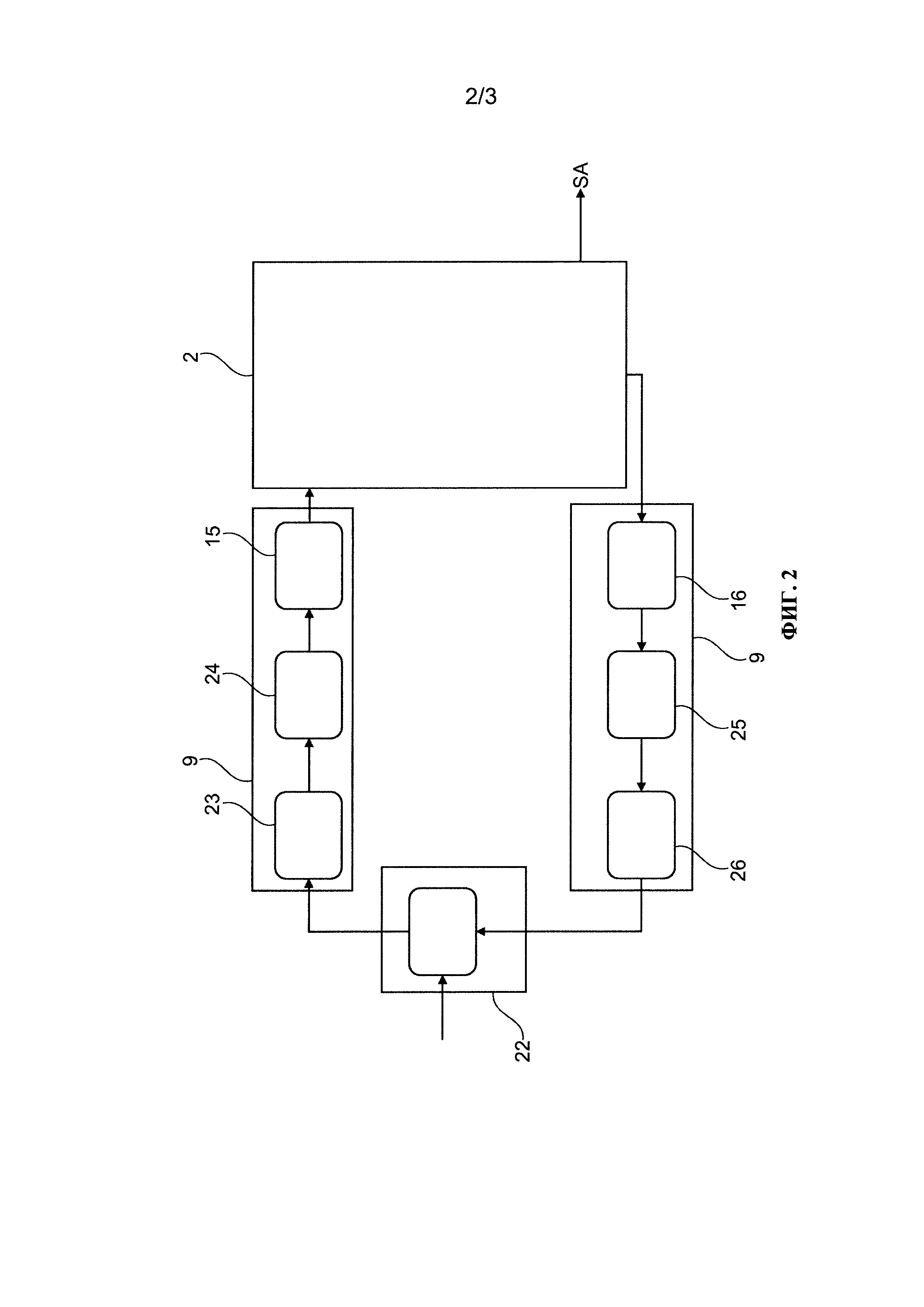
на фиг. 2 - схематическое изображение устройства,
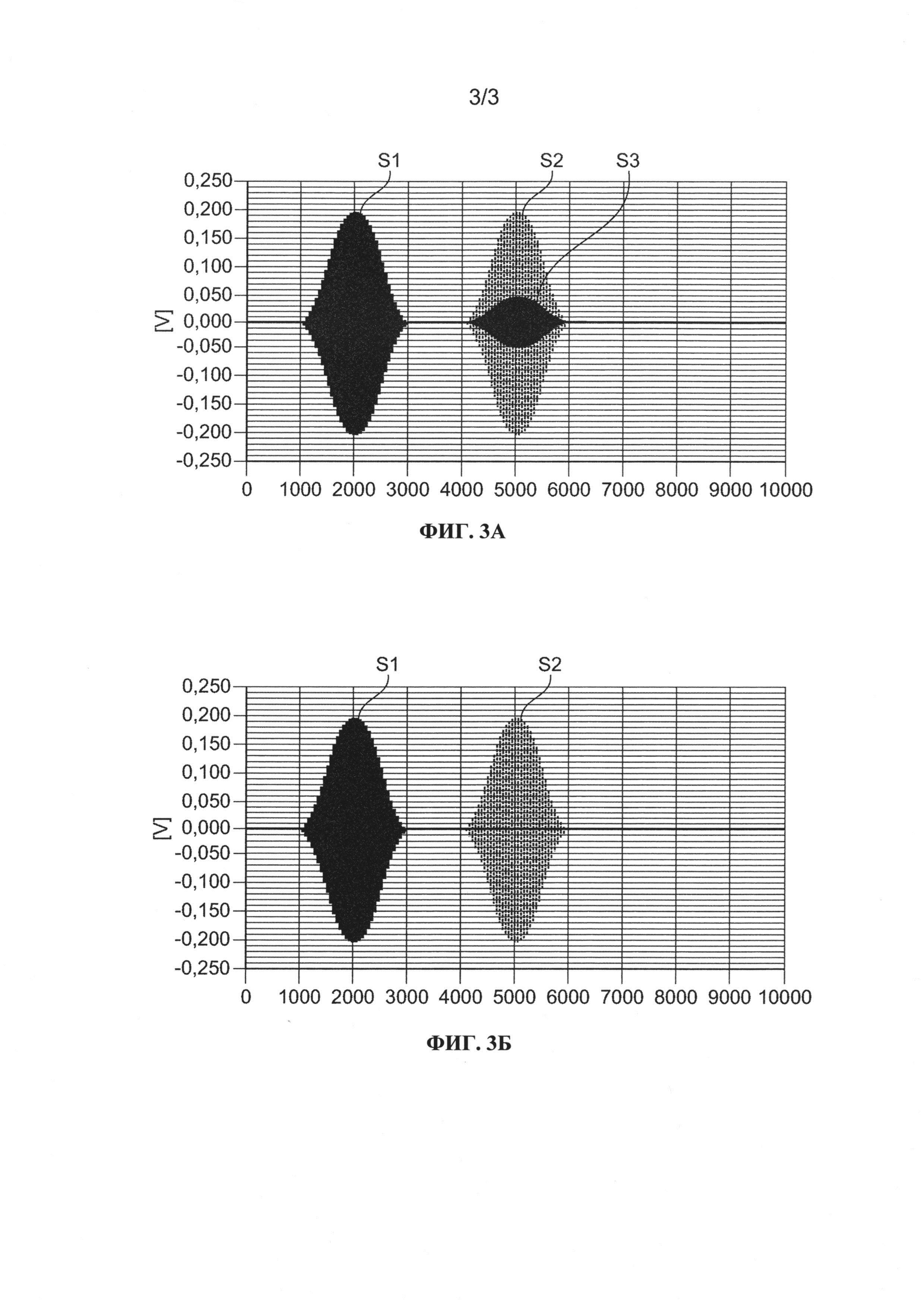
на фиг. 3А и 3Б - диаграммы ускорения для регулирующих датчиков.
На фиг. 1А и 1Б показаны вид сверху (фиг. 1А) и вид сбоку (фиг. 1Б) устройства 1 для исследования инерциального датчика 2, выполненного в виде датчика ускорения и/или датчика скорости вращения и применяемого в автомобилях.
Устройство 1 содержит два колебательных элемента 3 и 4, каждый из которых выполнен в виде прямоугольного стального параллелепипеда. В альтернативных вариантах осуществления изобретения эти параллелепипеды могут быть также изготовлены не из стали, а из других материалов, например из вольфрама, керамики, алюминия или бериллия. Колебательные элементы 3, 4 расположены на некотором расстоянии друг от друга и содержат точки 5, 6 крепления, предназначенные для инерциального датчика 2. Инерциальный датчик 2 содержит две точки 7, 8 крепления, посредством которых он крепится на колебательных элементах 3, 4 соответственно в их точках 5, 6 крепления. Точки 7, 8 крепления тоже расположены на некотором соответствующем расстоянии друг от друга и находятся/выполнены на двух противоположных сторонах инерциального датчика 2 или, соответственно, корпуса инерциального датчика 2.
С каждым из колебательных элементов 3, 4 соотнесено три модуля (9, 10, 11 и, соответственно, 12, 13, 14) возбуждения. В качестве исполнительных элементов модули 9-14 содержат исполнительные пьезоэлементы, включенные последовательно и совместно образующие пьезопакет 15. Эти пьезопакеты могут приводиться в действие независимо друг от друга, вследствие чего они могут независимо друг от друга сообщать ускорение соответствующему колебательному элементу 3, 4. При этом пьезопакеты 15 модулей 9-14 возбуждения ориентированы таким образом, что каждому колебательному элементу 3, 4 может быть сообщено ускорение в трех разных направлениях в пространстве. В частности, с этой целью пьезопакеты 15 ориентируют перпендикулярно друг другу, так что колебательным элементам 3, 4 может быть соответственно сообщено ускорение в направлениях X, Y и Z. Кроме того, каждый модуль 9-14 возбуждения содержит регулирующий датчик 16, 17 и 18 и, соответственно, 19, 20 и 21. При этом регулирующие датчики 17-21 расположены на стороне соответствующего колебательного элемента 3, 4, противоположной соответствующему пьезопакету соответствующего модуля 9-14 возбуждения. Каждый модуль 9-14 возбуждения содержит, далее, противовес для каждого пьезопакета. Вся конструкция устройства 1, находящаяся в незакрепленном и предпочтительно ненагруженном состоянии, опирается, например, на пенопласт. Вместо трех регулирующих датчиков на каждом колебательном элементе 3, 4 можно также расположить (например, приклеить) отдельный 3D-датчик ускорения.
На фиг. 2 представлено схематическое изображение устройства 1. Блок 22 управления приводит в действие исполнительные пьезоэлементы и, соответственно, модули 9-14 возбуждения. С этой целью блок 22 управления посылает сигнал, например, модулю 9 возбуждения. Последний содержит цифро-аналоговый преобразователь 23 с предвключенным усилителем 24, который, в свою очередь, соединен с пьезопакетом модуля 9 возбуждения для управления этим пакетом. Инерциальный датчик 2 возбуждают посредством созданного ускорения и измеряют выходной сигнал SA этого датчика. Одновременно с этим регулирующий датчик 16 модуля 9 возбуждения регистрирует ускорение, фактически созданное пьезопакетом 15, и подает соответствующий сигнал на усилитель 25, включенный перед аналого-цифровым преобразователем 26, который, в свою очередь, посылает выходной сигнал блоку 22 управления. С помощью такой обратной связи можно с прецизионной точностью получать требуемое ускорение, сообщаемое колебательным элементам 3, 4 и, соответственно, инерциальному датчику 2.
С помощью данного устройства можно стационарно воспроизводить в лабораторных условиях сигналы, измеренные в режиме реального времени в точках крепления инерциального датчика в транспортном средстве. Эти сигналы получают посредством двух блоков, каждый из которых состоит из колебательного элемента и трех модулей возбуждения, например в ходе испытательных поездок на автомобиле по различным испытательным трассам. Посредством данного устройства можно получить на обеих точках крепления инерциального датчика 2 разные сигналы для каждого из трех направлений в пространстве. При этом предлагаемое устройство может благоприятным образом компенсировать обратную связь, обусловленную какими-либо другими направлениями возбуждения. Путем воспроизведения сигналов ускорения, измеренных в транспортном средстве, можно проверять изначально различающиеся образцы со сравнимым возбуждением. Тем самым устройство 1 благоприятным образом обеспечивает значительную экономию затрат благодаря отказу от трудоемких измерений на транспортных средствах. Кроме того, имеет место экономия времени, если сравнивать, например, чувствительность инерциального датчика на различных стендах для испытаний образцов или различия в технике монтажа и выполнения соединений.
Сигналы ускорения, измеренные в точках крепления инерциального датчика 2 на транспортном средстве, считываются и сохраняются в памяти посредством управляющей программы блока 22 управления. Эта программа осуществляет вычисление необходимого выходного сигнала для отдельных пьезопакетов 15 путем умножения на комплексную передаточную матрицу в частотной области. Влияние поперечных направлений можно компенсировать путем определения передаточной матрицы.
Для определения комплексной передаточной функции на модули 9-14 возбуждения поочередно подают тестовые сигналы (тогда как на все остальные модули возбуждения поступает нулевой сигнал) и измеряют результирующее ускорение на всех регулирующих датчиках. Выполняется преобразование тестовых сигналов и сигналов датчиком с переходом в частотную область, после чего производится их деление (матричное деление). Полученный результат представляет собой квадратную матрицу комплексных передаточных функций, то есть передаточную матрицу. Каждый элемент этой матрицы соответствует одной комплексной функции передачи от источника возбуждения до датчика с частотными линиями в направлении оси X. Выполняется преобразование с переходом в частотную область выбранных заданных сигналов, которые образуют заданный комплексный вектор. Теперь требуется алгоритм, позволяющий вычислить по заданным значениям выходной сигнал источника возбуждения таким образом, чтобы ускорение на испытуемом образце как можно лучше соответствовало заданной характеристике, представленной графически. С этой целью заданный вектор умножается на обратную передаточную матрицу. Полученный результат представляет собой вектор комплексных выходных сигналов в частотной области. Выполняется преобразование выходного вектора с переходом во временную область и вывод его в качестве выходных данных. Одновременно с этим выполняются запись и отображение сигналов ускорения на датчиках 17-21.
Аналитическая обработка результатов предусматривает применение трех рабочих режимов, или методов. В методе прямой обработки данные поступают в неизменном виде на источник возбуждения колебаний, то есть на соответствующий модуль возбуждения. Этот метод служит исключительно для целей сравнения. В методе индивидуальной обработки для каждого канала в отдельности и без учета взаимного влияния этих каналов выполняется обработка одномерного массива данных в соответствии с первой ступенью алгоритма хорошо зарекомендовавшей себя программы построения диаграмм. Таким путем при заданной структуре данных можно добиться значений корреляции до 0,95. Благодаря простоте математических вычислений данный метод демонстрирует особую надежность и при более сложных условиях. В матричном же методе применяется описанный выше алгоритм, что позволяет добиться решительного улучшения корреляции до значений, превышающих 0,995.
На фиг. 3А и 3Б показаны диаграммы ускорения по двум осям устройства 3. На фиг. 3А два модуля возбуждения, например модули 9 и 10, возбуждаются со сдвигом по времени посредством одного пакета синусоидальных колебаний на каждый модуль со скоростью передачи 200 килосемплов в секунду (8 кГц по оси X, 10 кГц по оси Y). Через S1 здесь обозначено ускорение, получаемое посредством первого пакета синусоидальных колебаний и регистрируемое соответствующим регулирующим датчиком, а через S2 - ускорение, получаемое посредством второго пакета синусоидальных колебаний и регистрируемое соответствующим регулирующим датчиком. Из диаграммы видно, что второй пакет S2 синусоидальных колебаний вызывает резонансное колебание (S3) по оси X.
На фиг. 3Б показан результат применения описанного выше матричного метода с комплексной передаточной матрицей. Видно, что перекрестные помехи между каналами, или резонансные колебания по оси X, полностью устранены. Для этого пьезопакет одной оси (канал 0) регулируется таким образом, что он создает встречный выходной сигнал с частотой резонатора (канал 1) и с именно такими амплитудой и фазой, которые позволяют скомпенсировать нежелательное поперечное колебание.
Таким образом, с помощью передаточной матрицы и устройства 1 может быть достигнута высокая степень соответствия между заданными и фактическими характеристиками ускорения по шести осям. В качестве тестовых сигналов выводятся, например, пакеты синусоидальных колебаний, шумовые сигналы, реально зафиксированные ударные волны или противоположно направленные синусоидальные свип-сигналы.
Как уже упоминалось выше, заданный сигнал Xs(t) преобразуется путем перехода в частотную область посредством преобразования Фурье, а полученный результат умножается на обратную комплексную передаточную функцию H(f). Требуемый выходной сигнал Xo(t), который выводится в виде сигнала напряжения на соответствующий пьезоисточник возбуждения, получается в результате обратного преобразования с переходом во временную область посредством обратного преобразования Фурье. Затем измеренный сигнал Xi(t) ускорения сравнивается с заданной характеристикой, после чего проводится дальнейшая итеративная коррекция согласно какому-либо выбранному методу. На практике при оптимальных условиях таким путем достигается корреляция между Xi и Xs, превышающая 0,999. Решающим фактором при этом является точное определение передаточной функции. При многомерном возбуждении и неидеальных источниках возбуждения колебаний возникает взаимное влияние ускорений, обусловленное, например, поперечными колебаниями источника возбуждения, механическими связями инерциального датчика 2, поперечной чувствительностью датчиков либо влиянием нагрузки инерциального датчика 2, подвергаемого испытанию. Посредством предлагаемого устройства указанные влияния устраняются по меньшей мере в значительной степени. Для этого производится измерение динамических параметров N-мерной конструкции и составляется комплексная передаточная матрица Н.
Например, Н 00(f) представляет собой передаточную функцию модуля 9 возбуждения между его пьезопакетом 15 и соотнесенным регулирующим датчиком 16 (например, в направлении оси X). Кроме того, Н 01(f) представляет собой передаточную функцию между пьезопакетом 15 модуля 9 возбуждения и регулирующим датчиком 17 (например, в направлении оси Y от оси X).
В данном случае Н 00(f) и Н 11(f) образуют главную диагональ матрицы и соответствуют передаче между источником возбуждения, генерирующим сигнал в каком-либо направлении, и соответствующим датчиком, расположенным в том же направлении, тогда как Н 01(f) и Н 10(f) характеризуют поперечные влияния. Первым шагом к решению задачи является выполнение вычисления для каждого направления (то есть Х-источник возбуждения + Х-датчик, Y-источник возбуждения + Y-датчик, Z-источник возбуждения + Z-датчик) в соответствии с методом, предусматривающим использование программы построения диаграмм. При этом используются только элементы главной диагонали матрицы и не учитываются поперечные влияния. Этот метод, называемый методом индивидуальной обработки, является, однако, менее точным в случае многогомерного возбуждения из-за наличия взаимного влияния.
Описанный матричный метод позволяет получить решение N-мерной системы уравнений для каждой частотной линии: заданные N-сигналы образуют заданный вектор Xs (1, N). Режим передачи характеризуется квадратной передаточной матрицей H (N, N). Выходной вектор Хо (N, 1) определяется путем решения N-мерной системы уравнений. Вычисление осуществляется, конечно, в комплексной частотной области отдельно для каждой частотной линии. Как и в случае диаграммного метода, для каждого выходного канала осуществляется переход во  область посредством обратного преобразования Фурье.
область посредством обратного преобразования Фурье.
Технологическая машина, прежде всего ручная машина
Способ и устройство для диагностики определения рабочего параметра двигателя внутреннего сгорания
Насадка для ручной машины
Инструментальная система
Топливная форсунка
Ручная машина
Устройство для регулирования многоискрового зажигания в двигателе внутреннего сгорания и соответствующий способ
Распределительный клапан с герметичным седлом
Измерительное устройство для определения параметра текучей среды
Ручная машина
Способ и устройство для отделения твердых частиц из водной фазы

