Результат интеллектуальной деятельности: СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ЭКСКАВАТОРА И СПОСОБ СТРОИТЕЛЬСТВА ПОДЗЕМНОГО ПРОХОДА КРИВОЛИНЕЙНОГО ПРОФИЛЯ
Вид РИД
Изобретение
ОБЛАСТЬ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к области автоматизированного оборудования для выемки грунта и в частности к адаптивному устройству и способу управления режущим инструментом экскаватора.
СУЩЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] В Китае огромные масштабы добычи и потребления угля. При сооружении угольных шахт и добыче угля возможны проблемы при прокладке выработки или подземного прохода. Помимо этого, сооружение объектов инфраструктуры (подъездных путей, железнодорожных путей, тоннелей и обслуживающих ГЭС) также требует значительных объемов тоннельной выработки.
[0003] В существующем уровне техники наиболее часто используется стреловой экскаватор в качестве эффективного инструмента для ведения дорожных работ и тоннельной выработки. Эксплуатация экскаватора в ручном режиме связана с неудовлетворительными условиями работы, высоким уровнем рисков и существенными ограничениями, поэтому особую актуальность представляют решения для автоматизации работы экскаватора.
[0004] Автоматизация работы экскаватора требует решения таких проблем, как точность позиционирования и определение местоположения экскаватора в проходе или тоннеле. В литературе описано множество способов определения местоположения экскаватора. Однако из-за сложных условий подземной выработки и неудовлетворительных условий работы экскаваторов многие способы позиционирования имеют ограничения. В частности, большинство способов позиционирования невозможно использовать при сооружении подземного прохода криволинейного профиля. Следовательно, отсутствуют не только условия для автоматизации управления экскаваторами, но и возможности сооружения подземных проходов и тоннелей разного профиля.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Техническая задача
[0005] Задачей настоящего изобретения является сгладить недостатки существующего уровня техники и предложить систему позиционирования экскаватора и способ строительства подземного прохода криволинейного профиля, которые можно применять для сооружения подземных проходов криволинейного и прямолинейного профилей и которые позволили бы точно определять параметры позиционирования экскаватора внутри прохода с шестью степенями свободы в режиме реального времени, что позволит решить проблему точности позиционирования и определения положения экскаватора внутри прохода или туннеля в интересах автоматизации работы экскаватора.
Техническое решение
[0006] Для решения поставленной задачи в настоящем изобретении применяется следующее техническое решение: предлагается система позиционирования экскаватора для строительства подземного прохода криволинейного профиля, состоящая из: модуля экскаватора, «умного» модуля тахеометра, прибора с отражающей пластиной, модуль связи и управления, модуля бесплатформенной инерциальной навигационной системы, датчика наклона с двумя измерительными осями и призматического модуля позиционирования места выемки, при этом модуль связи и управления, модуль бесплатформенной инерциальной навигационной системы, датчик наклона с двумя измерительными осями и призматический модуль позиционирования установлены на модуле экскаватора, умный модуль тахеометра располагается за модулем экскаватора, а прибор с отражающей пластиной - между модулем экскаватора и умным модулем тахеометра;
[0007] Призматический модуль позиционирования экскаватора состоит из передней призмы позиционирования и задней призмы позиционирования, установленных на одной прямой;
[0008] прибор с отражающей пластиной состоит из контроллера, механизма шагающего движения, механизма привода вращения, лазерной отражающей пластины, призмы позиционирования на отражающей пластине и тахеометрической призмы заднего вида; при этом механизм привода вращения установлен на механизме шагающего движения, призма позиционирования на отражающей пластине установлена на механизме привода вращения, а контроллер установлен внутри прибора с отражающей пластиной и настроен таким образом, чтобы управлять движением шагового механизма и механизма привода вращения и запоминать угол вращения лазерной отражающей пластины относительно шагового механизма в режиме реального времени.
[0009] Еще одно усовершенствование согласно настоящему изобретению заключается в том, что призма позиционирования на отражающей пластине включает в себя как минимум три призмы 360°, а тахеометрическая призма заднего вида состоит из двух призм 360°, расположенных симметрично относительно шагового механизма.
[0010] Еще одно усовершенствование согласно настоящему изобретению заключается в том, что предлагается способ позиционирования экскаватора при строительстве подземного прохода, состоящий из следующих этапов:
[0011] а. при работе модуля экскаватора в проходе криволинейного профиля сначала выполняется прямое позиционирование модуля экскаватора, находящегося в пределах видимости, с помощью модуля тахеометра;
[0012] b. когда модуль тахеометра не может правильно определить позицию призмы экскаватора вне пределов видимости, например, при заходе в криволинейный изгиб подземного прохода, между экскаватором и модулем тахеометра устанавливается прибор с отражательной пластиной;
[0013] c. позиционирование призмы прибора с отражательной пластиной с помощью модуля тахеометра, чтобы получить шестистепенные координаты местоположения прибора с отражательной пластиной в подземном проходе, при этом угол вращения лазерной отражательной пластины относительно корпуса прибора с отражательной пластиной вычисляется контроллером в режиме реального времени, а координаты лазерной отражательной пластины в подземном проходе могут быть выражены с помощью известного уравнения плоскости; также в соответствии с принципом зеркального отражения, после того, как модуль тахеометра получит путем измерений и расчетов координаты позиционирующей призмы экскаватора, находится точка, симметричная этой точке, относительно лазерной отражательной пластины, то есть, фактические трехмерные координаты позиционирующей призмы экскаватора;
[0014] d. когда определить положение позиционирующей призмы экскаватора становится невозможно даже с помощью прибора с отражающей пластиной, так как экскаватор продвигается по проходу достаточно далеко и покидает пределы видимости, необходимо быстро переместить модуль тахеометра в нужную точку, при этом все еще известен позиционирующий параметр прибора с отражательной пластиной, а именно, трехмерные координаты тахеометрической призмы заднего вида; модуль тахеометра перемещают в нужную точку между модулем экскаватора и прибором с отражающей пластиной, при этом позиционирование модуля тахеометра осуществляется ретроспективным способом с помощью тахеометрической призмы заднего вида, затем прибор с отражательной пластиной перемещают и фиксируют в нужной точке между модулем экскаватора и модулем тахеометра;
[0015] e. повтор этапов c-d для получения точных координат модуля экскаватора по всей длине подземного прохода криволинейного профиля в режиме реального времени;
[0016] f. комбинированное позиционирование модуля экскаватора без использования прибора с отражающей панелью при переходе на подземный проход прямолинейного профиля.
[0017] Еще одно усовершенствование согласно настоящему изобретению заключается в том, что для позиционирования применяется комбинированный способ с сочетанием преимуществ модуля тахеометра и модуля бесплатформенной инерциальной навигационной системы, согласно которому модуль тахеометра рассчитывает координаты двух позиционирующих призм для получения координат местоположения и значения угла ориентации модуля экскаватора, а затем с помощью датчика наклона с двумя осями находит угол крена и угол дифферента корпуса, чтобы получить шестистепенные параметры позиционирования, также шестистепенные параметры позиционирования для модуля экскаватора определяются в режиме реального времени с использованием модуля бесплатформенной инерциальной навигационной системы, затем оба массива данных асинхронно комбинируются и выполняется комбинированное позиционирование.
[0018] Еще одно усовершенствование согласно настоящему изобретению заключается в том, что при необходимости установки прибор с отражательной пластиной устанавливается с внешней стороны прохода криволинейного профиля между модулем экскаватора и модулем тахеометра в точке, наиболее удаленной от модуля тахеометра; при этом угол вращения лазерной отражательной пластины относительно корпуса прибора с отражательной пластиной регулируется в соответствии с местоположением модуля экскаватора так, чтобы максимально увеличить диапазон позиционирования внутри прохода криволинейного профиля за один цикл перемещения модуля тахеометра.
Полезный эффект
[0019] Благодаря применению вышеописанного технического решения, настоящее изобретение обладает следующими преимуществами по сравнению с существующим уровнем техники:
[0020] Настоящее изобретение можно применять для сооружения подземных проходов криволинейного и прямолинейного профилей и точного определения параметров позиционирования экскаватора внутри прохода с шестью степенями свободы в режиме реального времени, что позволит решить проблему точности позиционирования и определения положения экскаватора внутри прохода или туннеля в интересах автоматизации работы экскаватора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0021] Ниже приводится описание технических решений согласно настоящему изобретению со ссылкой на прилагаемые чертежи:
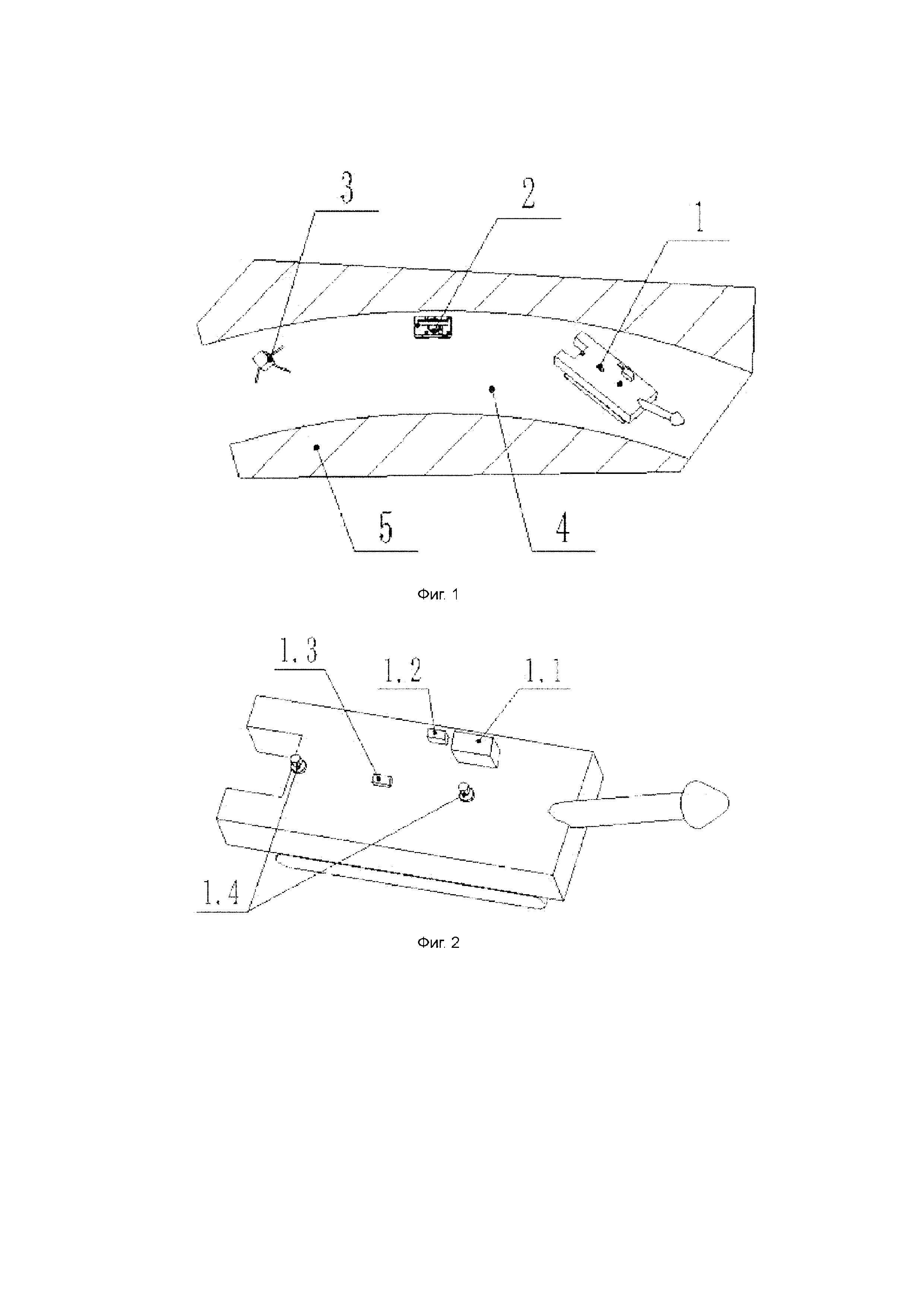
[0022] Фигура 1 - схематическое представление расположения системы позиционирования экскаватора согласно настоящему изобретению;
[0023] Фигура 2 - схематическое представление стрелового экскаватора согласно настоящему изобретению;
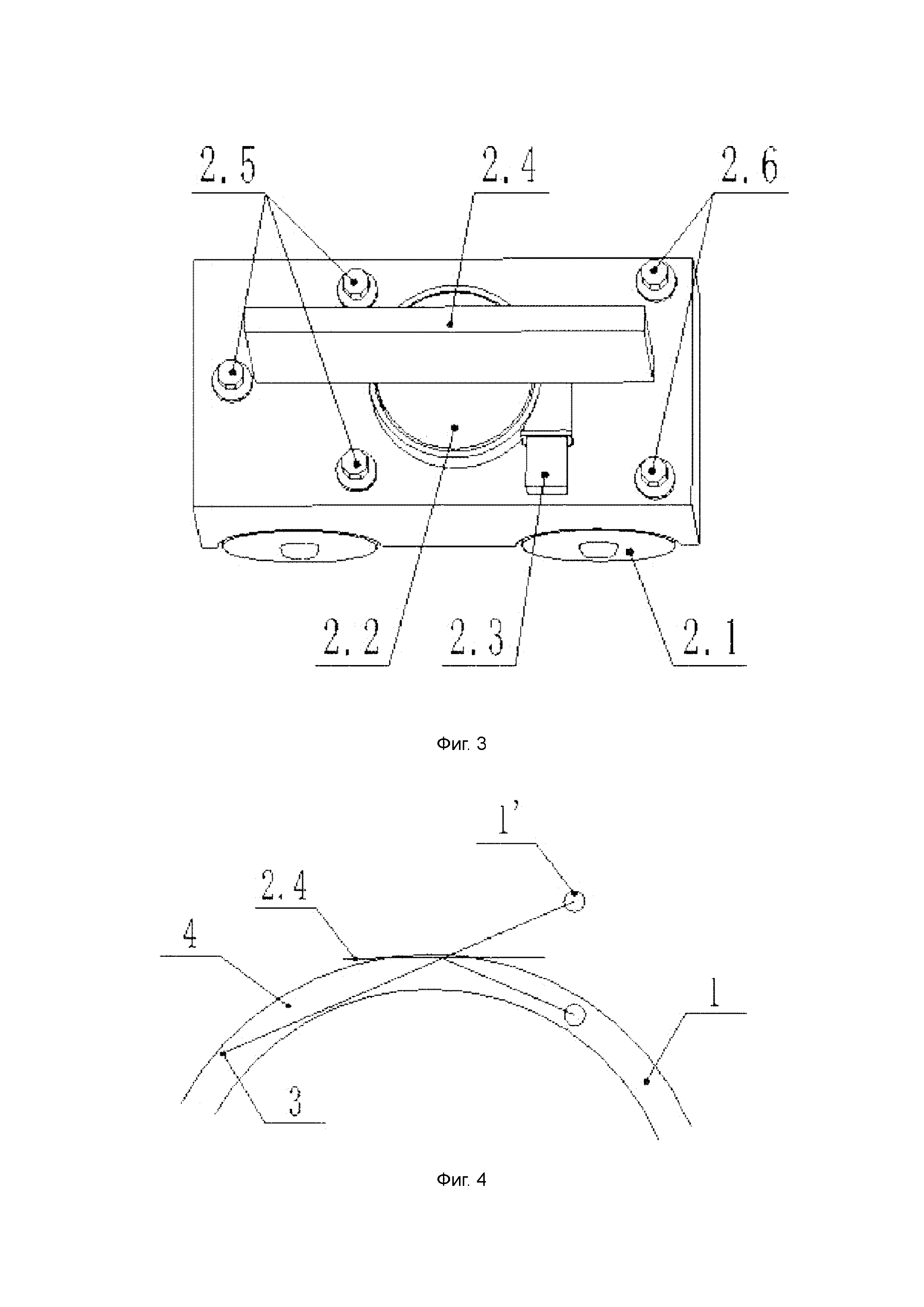
[0024] Фигура 3 - схематическое трехмерное представление прибора с отражательной пластиной согласно настоящему изобретению;
[0025] Фигура 4 - схематическое представление принципа зеркального отражения согласно настоящему изобретению;
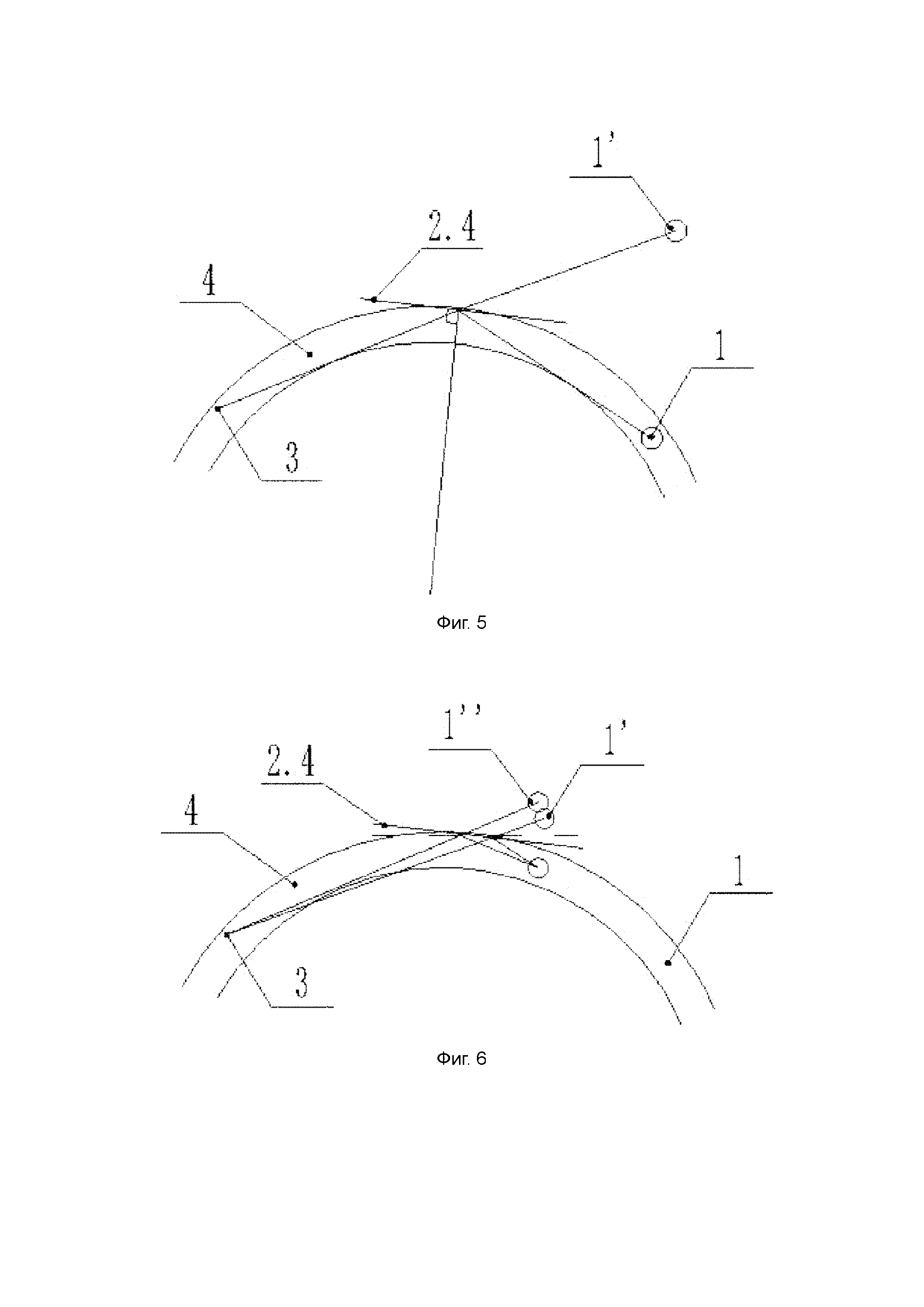
[0026] Фигура 5 - схематическое представление максимального расстояния позиционирования экскаватора в процессе разработки прохода криволинейного профиля согласно настоящему изобретению;
[0027] Фигура 6 - схематическое представление воздействия на систему в результате изменения угла лазерной отражательной пластины согласно настоящему изобретению.
[0028] На чертежах: 1: стреловой экскаватор; 1.1: модуль связи и управления; 1.2: модуль бесплатформенной инерциальной навигационной системы; 1.3: датчик наклона с двумя измерительными осями; 1.4: призма позиционирования экскаватора; 2: прибор с отражающей пластиной; 2.1: механизм шагающего движения; 2.2: механизм привода вращения; 2.3: шаговой двигатель; 2.4: лазерная отражательная пластина; 2.5: призма позиционирования на отражающей пластине; 2.6: тахеометрическая призма заднего вида; 3: модуль тахеометра; 4: проход; 5: угленосный пласт.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0029] Далее приводится предпочтительных вариантов осуществления настоящего изобретения.
[0030] Cистема позиционирования экскаватора для строительства подземного прохода криволинейного профиля согласно Фигурам 1-4 состоит из стрелового экскаватора 1, прибора с отражающей пластиной 2 и умного модуля тахеометра 3. Модуль связи и управления 1.1, модуль бесплатформенной инерциальной навигационной системы 1.2, датчик наклона с двумя измерительными осями 1.3 и призматический модуль позиционирования места выемки 1.4 установлены на стреловом экскаваторе 1. Умный модуль тахеометра 1.2 соединен с модулем связи и управления 1.1. Две призмы позиционирования 1.4 представляют собой призмы 360°, установленные вдоль центральной линии экскаватора, при этом одна призма установлена спереди, а другая - сзади.
[0031] Прибор с отражающей пластиной 2 состоит из механизма шагающего движения 2.1, механизма привода вращения 2.2, шагового двигателя 2.3, лазерной отражающей пластины 2.4, призмы позиционирования на отражающей пластине 2.5 и тахеометрической призмы заднего вида 2.6. Механизм привода вращения 2.2 установлен на корпусе машины, приводится в движение с помощью шагового двигателя 2.3 и, в свою очередь, вращает лазерную отражательную пластину 2.4. Контроллер установлен внутри прибора с отражающей пластиной 2 и управляет движением шагового механизма 2.1 и шагового двигателя 2.3 и запоминает угол вращения лазерной отражающей пластины 2.4 относительно корпуса прибора с отражающей пластиной 2 под действием шагового двигателя 2.3 в режиме реального времени. Конструкция призмы позиционирования на отражающей пластине 2.5 аналогична конструкции тахеометрической призмы заднего вида 3.6 и представляет собой призму 360°. Три призмы позиционирования на отражающей пластине 2.5 расположены не на одной линии и обеспечивают позиционирование прибора с отражающей пластиной 2. Две инерциальные призмы заднего вида 2.6 обеспечивают позиционирование модуля тахеометра 3 в процессе ее движения.
[0032] При работе стрелового экскаватора 1 в проходе криволинейного профиля модуль тахеометра 3 позиционирует экскаватор только на небольшом расстоянии. В тех случаях, когда модуль тахеометра 3 не может правильно определить позицию призмы экскаватора 1.4, так как она не находится в пределах видимости, на определенном расстоянии между экскаватором 1 и модулем тахеометра 3 устанавливается прибор с отражательной пластиной 2. Модуль тахеометра 3 определяет положение по трем призмам прибора с отражательной пластиной 2.5, чтобы получить шестистепенные координаты местоположения прибора с отражательной пластиной 2 в подземном проходе 4.
[0033] Поскольку угол вращения лазерной отражательной пластины 2.4 относительно корпуса прибора с отражательной пластиной 2 можно найти в режиме реального времени, координаты лазерной отражательной пластины 2.4 в подземном проходе 4 могут быть выражены с помощью известного уравнения плоскости. В соответствии с принципом зеркального отражения, после того, как модуль тахеометра 3 получит путем измерений и расчетов координаты позиционирующей призмы экскаватора 1.4, находится точка, симметричная этой точке, относительно лазерной отражательной пластины 2.4, то есть, фактические трехмерные координаты позиционирующей призмы экскаватора 1.4 в подземном проходе 4.
[0034] Когда определить положение позиционирующей призмы экскаватора 1.4 становится невозможно даже с помощью прибора с отражающей пластиной 2, так как экскаватор продвигается по проходу достаточно далеко и покидает пределы видимости, необходимо быстро переместить модуль тахеометра 3 в нужную точку между экскаватором 1 и прибором с отражательной пластиной 2. В этом случае все еще известен позиционирующий параметр прибора с отражательной пластиной 2, а именно, трехмерные координаты тахеометрической призмы заднего вида 2.6. Позиционирование модуля тахеометра 3 осуществляется ретроспективным способом с помощью тахеометрической призмы заднего вида 2.6. Затем прибор с отражательной пластиной 2 перемещают в нужную точку между стреловым экскаватором 1 и модулем тахеометра 3.
[0035] Для позиционирования стрелового экскаватора 1 применяется комбинированный способ позиционирования. Модуль тахеометра 3 рассчитывает координаты двух позиционирующих призм 1.4 для получения координат местоположения и значения угла ориентации корпуса экскаватора 1, а затем с помощью датчика наклона с двумя осями 1.3 находит угол крена и угол дифферента корпуса, чтобы получить шестистепенные параметры позиционирования для экскаватора. Также шестистепенные параметры позиционирования для экскаватора 1 можно определить в режиме реального времени с использованием модуля бесплатформенной инерциальной навигационной системы 1.2. Способ позиционирования с использованием модуля тахеометра отличается высокой точностью позиционирования и отсутствием погрешности накопления, но требует значительных временных затрат и неэффективен для работы в режиме реального времени. Способ позиционирования с использованием модуля бесплатформенной инерциальной навигационной системы хорошо работает в режиме реального времени, но имеет погрешность накопления и не обладает достаточной точностью позиционирования в долгосрочной перспективе. Чтобы воспользоваться преимуществами обоих способов и нивелировать их недостатки, применяется комбинированный способ, который обеспечивает более качественное позиционирование в режиме реального времени.
[0036] Когда стреловой экскаватор 1 выполняет выемочные работы на проходе комбинированного прямолинейного и криволинейного профиля, рабочий метод состоит из следующих этапов:
[0037] a. Сначала экскаватор 1 выполняет работу в проходе прямолинейного профиля, при этом комбинированное позиционирование экскаватора осуществляется без использования прибора с отражательной пластиной 2, а при переходе экскаватора к проходу криволинейного профиля прибор с отражательной пластиной 2 все еще не используется.
[0038] b. При продолжении работы модуль тахеометра не может эффективно выполнять позиционирование призмы экскаватора 1.4, так как она выходит за пределы диапазона видимости, поэтому необходимо установить прибор с отражательной пластиной 2 в нужной точке.
[0039] c. Позиционирование призмы прибора с отражательной пластиной 2.5 на приборе с отражательной пластиной 2 выполняется с использованием модуля тахеометра 3, при этом составляется уравнение плоскости для лазерной отражательной пластины 2.4 в проходе 4, которое обновляется в режиме реального времени в соответствии с ходом шагового двигателя 2.3, а эффективное позиционирование экскаватора осуществляется по методу зеркального отражения для получения шестистепенных параметров позиционирования экскаватора.
[0040] d. При продолжении работы экскаватора в проходе криволинейного профиля наступает момент, когда эффективно позиционировать экскаватор с помощью метода зеркального отражения становится невозможно, так как он выходит за пределы диапазона видимости. В этом случае необходимо быстро переместить модуль тахеометра 3 так, чтобы можно было позиционировать экскаватор без использования прибора с отражательной пластиной 2.
[0041] e. Для получения точных данных о положении экскаватора в режиме реального времени в течение всего процесса разработки прохода криволинейного профиля, этапы b-d повторяются и выполняются циклично.
[0042] f. После завершения разработки прохода криволинейного профиля экскаватор выполняет работу в проходе прямолинейного профиля, так что его можно эффективно позиционировать без использования прибора с отражательной пластиной 2.
[0043] Как показано на Фигуре 5, при необходимости установки прибор с отражательной пластиной 2 устанавливается с внешней стороны прохода криволинейного профиля 4 между экскаватором 1 и модулем тахеометра 3 в точке, наиболее удаленной от модуля тахеометра. В этом случае луч лазера, испускаемый модулем тахеометра проходит по касательной к внутренней боковой стенке прохода, а угол лазерной отражательной пластины 2.4 регулируется так, чтобы он проходил перпендикулярно радиусу дуги прохода, проходящей через центральную точку лазерной отражательной пластины 2.4. Луч лазера, который отражает лазерная отражательная пластина 2.4, проходит по касательной к внутренней боковой стенке прохода, так, чтобы попасть в диапазон позиционирования экскаватора внутри прохода криволинейного профиля.
[0044] Как показано на Фигуре 6, когда расстояние между стреловым экскаватором 1 и прибором с отражательной пластиной 2 невелико, при этом угол лазерной отражательной пластины 2.4 регулируется согласно Фигуре 5, точкой на экскаваторе, симметричной лазерной отражательной пластине, будет считаться точка 1', то есть, экскаватор находится вне пределов диапазона обнаружения модуля тахеометра и для него невозможно выполнить позиционирование. После того, как угол лазерной отражательной панели 2.4 будет надлежащим образом отрегулирован, точкой на экскаваторе, симметричной лазерной отражательной пластине, будет считаться точка 1'', то есть, в этом случае экскаватор можно эффективно позиционировать. Следовательно, угол вращения лазерной отражательной панели 2.4 относительно корпуса прибора с отражательной панелью 2 необходимо отрегулировать в соответствии с местонахождением экскаватора 1, управление такой регулировкой осуществляется с помощью шагового двигателя 2.3, так, чтобы позиционирование экскаватора можно было выполнить с помощью модуля тахеометра, пока экскаватор находится в пределах диапазона позиционирования.
[0045] Выше приводится предпочтительный вариант осуществления изобретения. В варианты осуществления настоящего изобретения специалисты могут вносить различные изменения и улучшения, а любые представленные здесь описания не могут считаться ограничивающими смысл настоящего изобретения.
Устройство для определения износа скользящей муфты направляющего подъемника стального троса шахтного ствола и способ его определения
Устройство для регулирования высоты автоматической врубовой машины на основе определения сейсмических колебаний врубовой машины и способ такого регулирования
Способ определения абсолютного положения угледобывающей машины
Соединительное устройство для подъемных канатов шахтного подъемника и способ измерения, осуществляемый посредством указанного устройства
Подъемная платформа шахтного подъемника и способ подъема
Система транспортировки человека на дальнее расстояние по наклонной выработке
Закрепляющее устройство и устройство формирования изображения
Система и способ автоматического регулирования натяжения направляющих канатов подвесной платформы с гибким кабелем
Аварийный буфер подъемника
Способ и механическое устройство предотвращения отклонения направляющего каната
Стыковочная платформа шахтного подъемника, подходящая для гибкой направляющей, и способ стыкования для шахтного подъемника
Способ и устройство для исполнения команд действий пользователя
Способ и устройство для контролирования состояний выравнивания натяжения и регулировки смещения стальных проволочных канатов многоканатного подъёмника

