Результат интеллектуальной деятельности: Аэродромный радиолокационный комплекс управления воздушным движением
Вид РИД
Изобретение
Изобретение относится к области управления полетами летательных аппаратов.
Известен радиолокационный комплекс управления воздушным движением, содержащий первичный радиолокатор, соединенный с процессором по каналу первичного радиолокатора, а также устройство отображения радиолокационной информации и пульт управления, соединенные с процессором (RU 32888 U1). Указанный комплекс использует только отражение или вторичное излучение радиоволн, поэтому он недостаточно надежен и точен.
Известен радиолокационный комплекс управления воздушным движением, содержащий два независимых канала получения радиолокационной информации: первичный радиолокатор и вторичный радиолокатор (RU 2013138158 А). Однако радиолокационная информация, поступающая по указанным каналам, не объединяется. Информационным данным - параметрам положения (координатам) цели в пространстве, полученным по разным каналам, не могут быть присвоены статистические веса, что не позволяет повысить точность определения координат цели. Обработка необъединенной информации связана с большой нагрузкой на диспетчеров, что отрицательно влияет на надежность комплекса.
Известен радиолокационный комплекс, содержащий три независимых канала получения радиолокационной информации: первичный радиолокатор, вторичный радиолокатор и радиолокатор государственного опознавания (RU 34759 U1). Каналы указанных радиолокаторов соединены с сервером, выполненным с возможностью объединения радиолокационной информации. Указанный комплекс не используется для получения информации непосредственно в аэродромной зоне ввиду ограниченной зоны действия и недостаточной точности оценки координат на малых расстояниях. Кроме того в комплексе не предусмотрено присваивание веса данным, полученным от разных каналов, что не позволяет повысить точность определения координат цели. Канал государственного опознавания, дублируя данные вторичного радиолокатора, содержит сложное наземное и бортовое оборудование, что понижает надежность системы.
Известен радиолокационный комплекс управления воздушным движением, содержащий процессор, интерфейс пользователя, соединенный с процессором, канал первичного радиолокатора, канал автоматического зависимого наблюдения вещательного типа и канал пассивного радиолокатора, соединенные с процессором через коммутационное устройство (US 7961135 В2). В данном аналоге значимость данных, поступающих от каналов, так называемый статистический вес, при определении координат цели не учитывается. Пассивный радиолокатор обнаруживает сигналы, отраженные от цели, при облучении ее третьим случайным источником электромагнитных волн. Указанные обстоятельства обуславливают относительно невысокую точность и надежность комплекса-аналога.
Наиболее близким аналогом (прототипом) заявленного изобретения является аэродромный радиолокационный комплекс управления воздушным движением «Лира-А10», http://www.lemz.ru/views/solutions/orvd/liraa10. Комплекс-прототип содержит сигнальный процессор, пульт управления, устройство отображения траекторией информации, соединенные с сигнальным процессором, канал первичного радиолокатора и канал вторичного радиолокатора, соединенные с сигнальным процессором через коммутационное устройство. В коммутационном устройстве происходит объединение данных от первичного и вторичного радиолокаторов. Однако значимость данных, так называемый статистический вес, при определении координат цели не учитывается. Наличие только двух каналов получения данных и отсутствие возможности присваивать им статистический вес определяет относительно невысокую надежность и точность комплекса-прототипа.
При разработке предлагаемого изобретения решалась техническая проблема, заключающаяся в создании аэродромного радиолокационного комплекса управления воздушным движением, лишенного указанных выше недостатков.
Техническим результатом предлагаемого изобретения является:
- повышение надежности радиолокационного комплекса управления воздушным движением;
- повышение точности радиолокационного комплекса управления воздушным движением при работе в штатном режиме.
Указанный технический результат достигается тем, что аэродромный радиолокационный комплекс управления воздушным движением, содержащий сигнальный процессор, пульт управления, устройство отображения траекторной информации, соединенные с сигнальным процессором, канал первичного радиолокатора и канал вторичного радиолокатора, соединенные с сигнальным процессором через коммутационное устройство, дополнительно снабжен каналом автоматического зависимого наблюдения вещательного типа, соединенным с сигнальным процессором через коммутационное устройство, и индикатором включенных и/или отключенных каналов, соединенным с сигнальным процессором, причем коммутационное устройство дополнительно содержит логическую схему, выполненную с возможностью присвоения статистического веса данным от каналов, объединения и передачи в сигнальный процессор объединенных взвешенных данных от трех каналов, или объединенных взвешенных данных от любых двух каналов, или данных от любого одного канала, а сигнальный процессор выполнен с возможностью выдачи в устройство отображения траекторной информации координат цели с точностью, обусловленной составом и статистическим весом данных от каналов.
Возможность логической схемы коммутационного устройства присваивать статистический вес данным от каналов, объединять и передавать в сигнальный процессор объединенные взвешенные данные от трех каналов, или объединенные взвешенные данные от любых двух каналов, или данные от любого одного канала обеспечивается использованием в ее составе имеющихся в продаже соответствующих стандартных функциональных блоков, стандартных функциональных элементов. Так, в качестве устройств присвоения веса могут быть использованы стандартные умножители, в качестве устройств объединения канальной информации - стандартные сумматоры, реализуемые в соответствующей программируемой логической интегральной схеме, например, типа «Cyclone IV», https://www.altera.com/products/fpga/cyclone-series/cyclone-iv/overview.html.
Возможность сигнального процессора выдавать в устройство отображения траекторной информации координаты цели с точностью, обусловленной составом и статистическим весом данных от каналов обеспечивается использованием в качестве сигнального процессора любых вычислителей, например, таких как вычислитель «FURY-1», http://www.npp-crts.ru/competencies/development-center/high-level-electronic-components/fury1.
Повышение надежности и точности предлагаемого комплекса обусловлено следующим. Предлагаемый комплекс дополнительно снабжен каналом автоматического зависимого наблюдения вещательного типа, соединенным с сигнальным процессором через коммутационное устройство, что позволяет не только получить дополнительный источник данных и за счет этого повысить точность работы комплекса в штатном режиме и его общую надежность. В связи с тем, что коммутационное устройство дополнительно содержит логическую схему, выполненную как указано выше, данным, полученным от каждого из каналов, в том числе от дополнительного канала автоматического зависимого наблюдения вещательного типа, присваиваются статистические веса в зависимости от текущего статуса каждого канала, обусловленного погодными условиями, помехо-целевой обстановкой и расстоянием до летательного аппарата. В связи с этим при работе комплекса в штатном режиме обеспечивается повышение точности за счет того, что объединение данных для дальнейшей передачи в сигнальный процессор осуществляется с учетом их статистического веса. Наличие дополнительного, третьего, канала, а также указанное выполнение логической схемы позволяют обеспечить настолько же надежную работу комплекса и в случае отключения (аварийного или регламентного) не только любого одного, но и любых двух каналов. Для обеспечения такой работы комплекса сигнальный процессор выполнен с возможностью выдачи в устройство отображения траекторной информации координат цели с точностью, обусловленной составом и статистическим весом данных от каналов. При этом информация о задействованных каналах учитывается диспетчером благодаря наличию в предлагаемом аэродромном радиолокационном комплексе индикатора включенных и/или отключенных каналов, соединенного с сигнальным процессором.
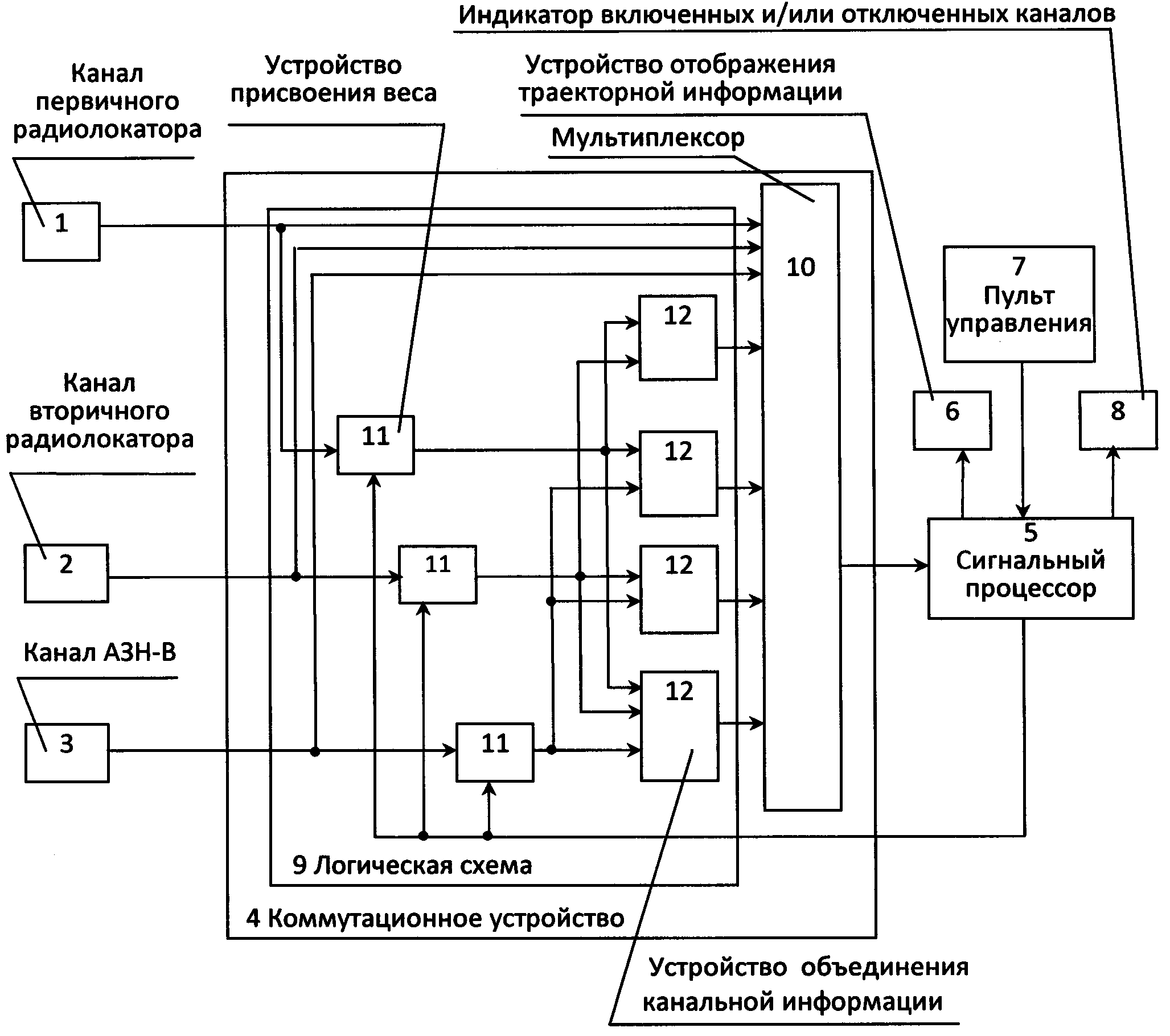
На чертеже представлена функциональная схема предлагаемого аэродромного радиолокационного комплекса управления воздушным движением.
Схема содержит канал 1 первичного радиолокатора, канал 2 вторичного радиолокатора, канал 3 автоматического зависимого наблюдения вещательного типа, коммутационное устройство 4, сигнальный процессор 5, устройство отображения траекторной информации 6, пульт управления 7, индикатор 8 включенных и/или отключенных каналов. Коммутационное устройство 4 содержит логическую схему 9 и мультиплексор 10. Логическая схема содержит три устройства 11 присвоения веса и четыре устройства 12 объединения канальной информации.
В качестве канала 1 первичного радиолокатора может быть использован, например, первичный радиолокатор комплекса управления воздушным движением «Лира-А10», http://www.lemz.ru/views/solutions/orvd/liraa10. В качестве канала 2 вторичного радиолокатора может быть использован, например, радиолокатор «Аврора-2», http://www.vniira.ru/ru/products/790/809/1175/?text=elements. В качестве канала 3 автоматического зависимого наблюдения вещательного типа использована, например, система АЗН-В «Сота-Х4», http://www.npp-crts.ru/competencies/development-center/system-radio-solutions/sota_x4/.
Другие составные части (блоки, элементы) предлагаемого комплекса могут представлять собой имеющиеся в продаже соответствующие стандартные функциональные блоки или стандартные функциональные элементы, в том числе, соответствующие функциональные блоки и функциональные элементы комплекса-прототипа.
Приведенная на чертеже логическая схема 9 содержит три умножителя, используемых в качестве устройств 11 присвоения веса, и четыре сумматора, используемых в качестве устройств 12 объединения канальной информации, реализованных в программируемой логической интегральной схеме (ПЛИС) типа «Cyclone IV» http://www.altera.com/products/fpga/cyclone-series/ceclone-iv/overview.html.
Мультиплексор 10 реализуется в той же микросхеме ПЛИС типа «Cyclone IV», а в качестве сигнального процессора 5 использован вычислитель «FURY-1», http://www.npp-crts.ra/competencies/development-center/high-level-electronic-components/furyl/.
В качестве устройства 6 отображения траекторной информации использован монитор типа «UP2716D», http://www.dell.com/ru/business/p/dell-up2716d-monitor/pd, в качестве пульта управления 7 - клавиатура «K120» компании производителя http://www.logitech.com/ru-ru/product/k120, в качестве индикатора 8 включенных и/или отключенных каналов - отдельный дисплей типа «Е2416Н», http://www.dell.com/ru/p/dell-e2416h-monitor/pd.
Предлагаемый комплекс работает следующим образом. Информация о координатах цели поступает в коммутационное устройство 4 и далее в логическую схему 9 по трем каналам: каналу 1 первичного радиолокатора, каналу 2 вторичного радиолокатора, каналу 3 автоматического зависимого наблюдения вещательного типа (АЗН-В). В коммутационном устройстве 4 посредством устройств 11 присвоения веса координатам каждого канала присваиваются статистические веса, информация о которых содержится в базе данных сигнального процессора 5. Далее взвешенные координаты объединяются в устройствах 12 объединения канальной информации и через мультиплексор 10 поступают в сигнальный процессор 5. В результате на мониторе устройства 6 отображения траекторной информации диспетчер наблюдает необходимую для принятия решения по управлению воздушным движением информацию. Причем степень достоверности информации диспетчер оценивает с учетом показаний индикатора 8 включенных и/или отключенных каналов, который в описанном случае показывает, что все три канала находятся в работе. Необходимые команды диспетчер вводит посредством пульта управления 7.
В случае отключения одного или двух каналов из набора 1, 2, 3 ввиду неисправности или ввиду проведения профилактических (регламентных) работ, индикатор 8 отображает соответствующую информацию, которая говорит диспетчеру о снижении достоверности поступающей информации. Однако заявленный радиолокационный комплекс продолжает работать и в этом случае.
В случае отключения одного канала из набора 1, 2, 3 ввиду неисправности или ввиду проведения профилактических работ заявленный комплекс работает следующим образом. Информация о координатах цели поступает в коммутационное устройство 4 по двум функционирующим каналам. В коммутационном устройстве координатам каждого канала присваиваются статистические веса, информация о которых содержится в базе данных сигнального процессора 5.
Далее взвешенные координаты объединяются в устройствах 12 объединения канальной информации и через мультиплексор 10 поступают в сигнальный процессор 5. В результате на мониторе устройства 6 отображения траекторной информации диспетчер наблюдает необходимую для принятия решения по управлению воздушным движением информацию. Причем степень достоверности информации диспетчер оценивает с учетом показаний индикатора 8 включенных и/или отключенных каналов, который в описанном случае показывает, что два канала находятся в работе и еще один отключен с указанием какой именно.
В случае отключения двух каналов 1, 2 или 2, 3 или 1, 3 ввиду неисправности или ввиду проведения профилактических работ заявленный комплекс работает следующим образом. Информация о координатах цели поступает в коммутационное устройство 4 по одному из 3-х каналов. В коммутационном устройстве координатам рабочего канала статистические веса не присваиваются, на что процессором 5 в коммутационное устройство 4 дается соответствующая команда. Далее информация через мультиплексор 10 поступает в сигнальный процессор 5. В результате на мониторе устройства 6 отображения траекторной информации диспетчер наблюдает необходимую для принятия решения по управлению воздушным движением информацию. Причем степень достоверности информации диспетчер оценивает с учетом показаний индикатора 8 включенных и/или отключенных каналов, который в описанном случае показывает, что один канал находятся в работе и еще два отключены с указанием, какие именно.
Количество сочетаний объединяемых каналов равно 4: 1-2, 2-3, 1-3 и 1-2-3. В указанных сочетаниях информационные данные (координаты) каналов 1, 2 и 3 могут объединяться при различных наборах весов.
Выдача координат цели сигнальным процессором 5 с точностью, обусловленной составом и статистическим весом каналов, обеспечивается следующим образом. Априорно известны точностные характеристики каналов 1, 2, 3, что позволяет заранее рассчитать интегрированную точность отображения траекторной информации координат цели от каналов 1, 2, 3 во всех возможных их сочетаниях. База данных соответствий точностных характеристик и статических весов (далее база данных соответствий) для всех возможных сочетаний включенных каналов 1, 2, 3 размещена в перепрограммируемом постоянном запоминающем устройстве сигнального процессора 5. Указанная база данных соответствий содержит информацию о 4-х возможных сочетаниях объединения каналов: 1-2, 2-3, 1-3 и 1-2-3, точностные характеристики каналов а также наборы весов для указанных сочетаний. Исходя из принципа ранжирования весов, каналу, имеющему лучшие показатели с точки зрения точностных характеристик, присваивается больший вес, а каналу, имеющему худшие параметры - наименьший вес, в случае же когда два канала не работоспособны, работоспособному каналу вес не присваивается, и ему сопоставляются точностные характеристики, соответствующие данному каналу.
При сопровождении цели статистические веса каналов в общем случае могут меняться в зависимости от расстояния до цели, присутствия активных или пассивных помех, погодных и иных условий. Так, например, при хороших погодных условиях в отсутствие активных и пассивных помех при расстоянии до цели 100 км веса каналов могут иметь значения, приведенные в таблице 1.
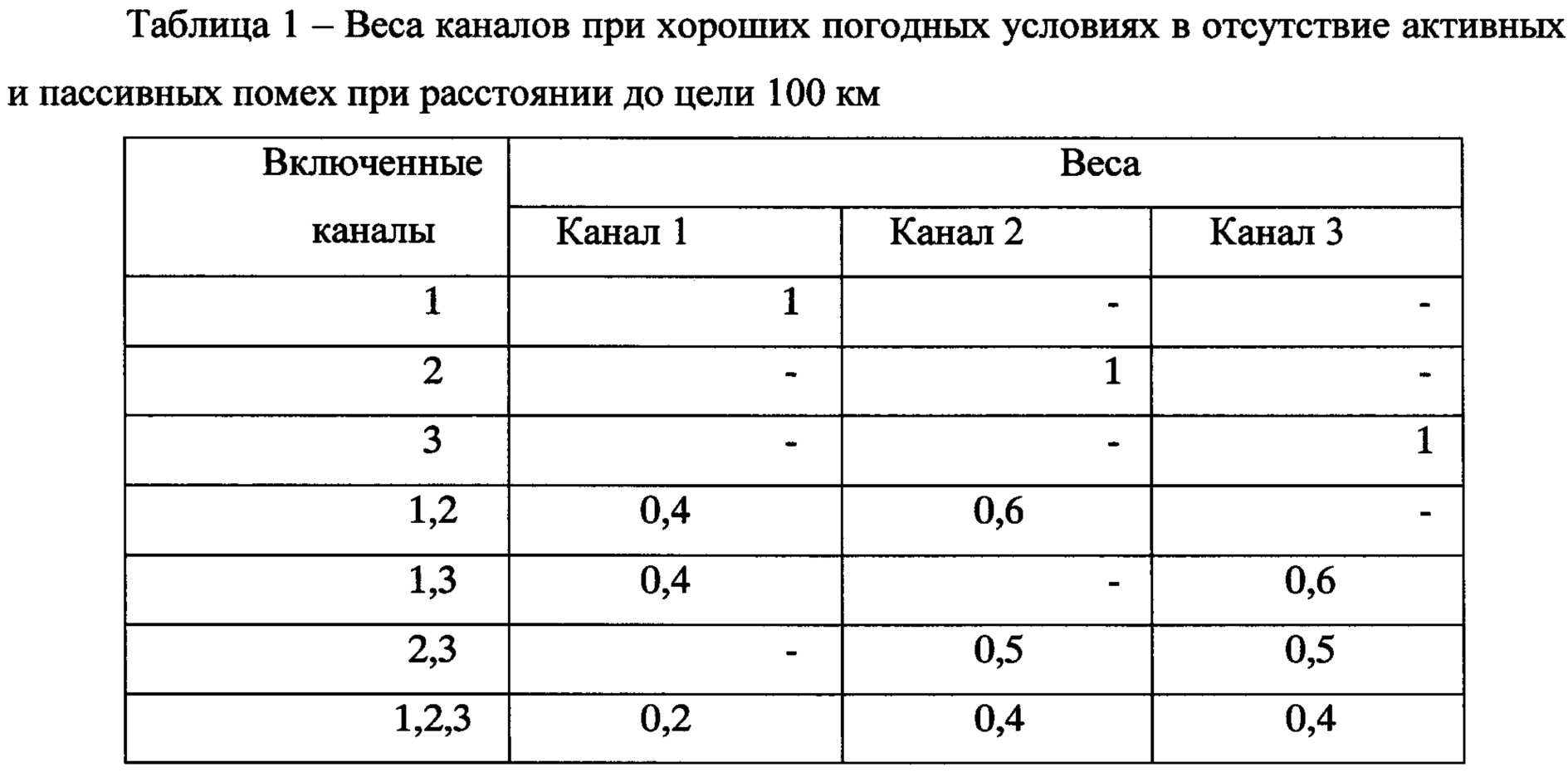
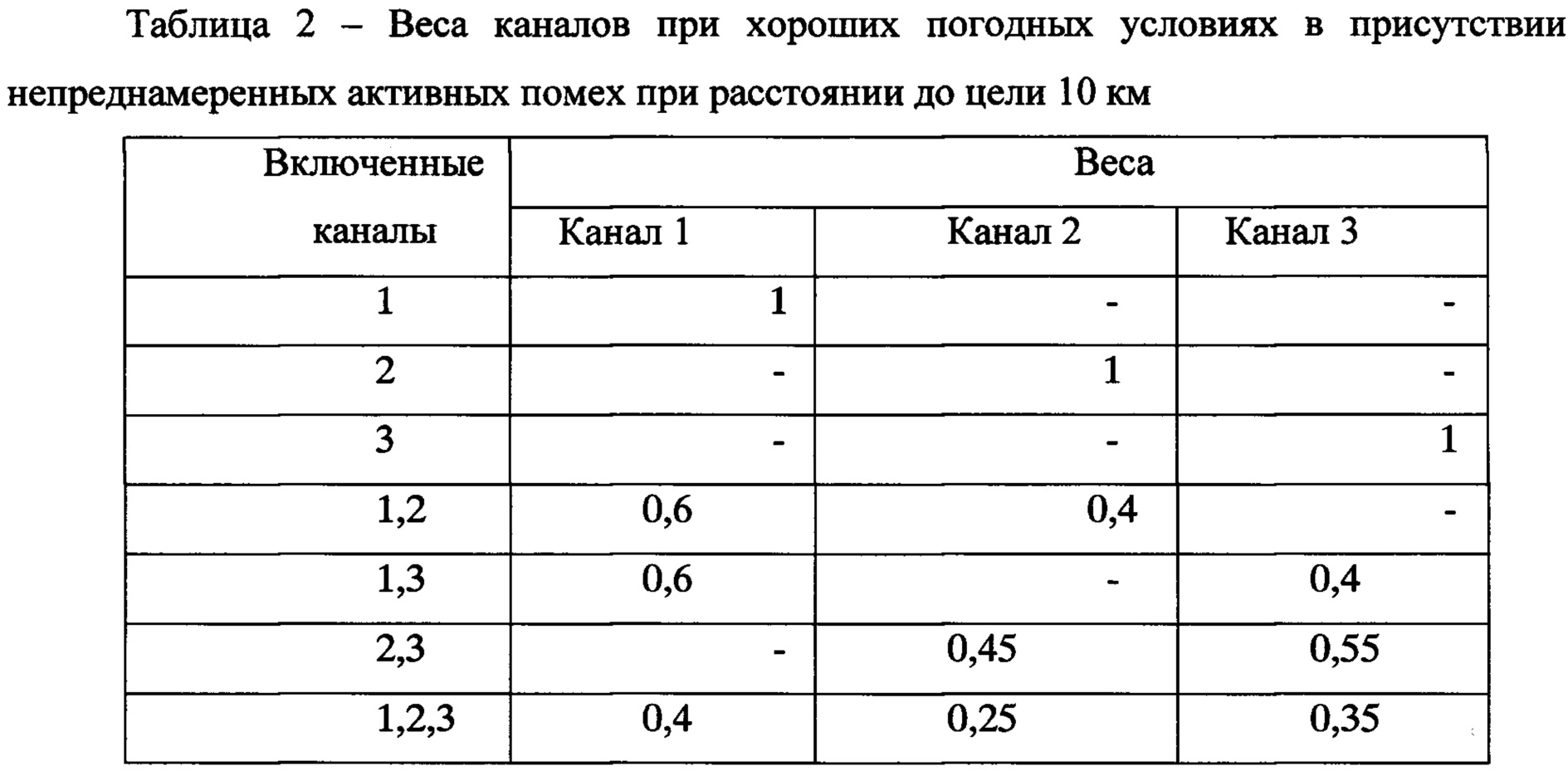
При хороших погодных условиях в присутствии непреднамеренных активных помех, воздействующих на канал вторичного радиолокатора и канал автоматического зависимого наблюдения вещательного типа, при расстоянии до цели 10 км веса каналов могут иметь значения, приведенные в таблице 2.
Таким образом, сигнальный процессор 5 в зависимости от того, сколько каналов из набора 1, 2, 3 включены, по базе данных соответствий выбирает необходимые веса и выдает их в устройства присвоения веса 11, а также выдает команду мультиплексору 10, для коммутации одного из его входов на вход сигнального процессора. Одновременно с этим по базе данных соответствий сигнальный процессор определяет погрешность отображения траекторной информации для выбранного сочетания каналов. После чего выдает траекторную информацию и информацию о точностных характеристиках в устройство отображения траекторной информации 6, а также информацию о включенных каналах на индикатор 8 включенных и/или отключенных каналов.
Сравнение показателей надежности и точности предлагаемого комплекса с прототипом показывает, что среднее время наработки на отказ увеличивается с 20000 часов до 25000-30000 часов для предлагаемого радиолокационного комплекса, а ошибка измерения дальности в штатном режиме, т.е. при работе всех трех каналов, уменьшается со 120 м до 60-75 м. Расчеты производились по следующим методикам: Левин В. И. Логическая теория надежности сложных систем. М.: Энергоатомиздат, 1985.; Диллон, Б. Инженерные методы обеспечения надежности систем: пер. с англ. / Б. Диллон, Ч. Сингх. - М.: Мир, 1984. - 318 с.; Г.А. Пахолков, Г.Е. Збричкая, Ю.Т. Криворучко и др. Обработка сигналов в радиотехнических системах ближней навигации. М.: Радио и связь, 1992. - 256 с.
Аэродромный радиолокационный комплекс управления воздушным движением, содержащий сигнальный процессор, пульт управления, устройство отображения траекторной информации, соединенные с сигнальным процессором, канал первичного радиолокатора и канал вторичного радиолокатора, соединенные с сигнальным процессором через коммутационное устройство, отличающийся тем, что он дополнительно снабжен каналом автоматического зависимого наблюдения вещательного типа, соединенным с сигнальным процессором через коммутационное устройство, и индикатором включенных и/или отключенных каналов, соединенным с сигнальным процессором, причем коммутационное устройство дополнительно содержит логическую схему, выполненную с возможностью присвоения статистического веса данным от каналов, объединения и передачи в сигнальный процессор объединенных взвешенных данных от трех каналов, или объединенных взвешенных данных от любых двух каналов, или данных от любого одного канала, а сигнальный процессор выполнен с возможностью выдачи в устройство отображения траекторной информации координат цели с точностью, обусловленной составом и статистическим весом данных от каналов.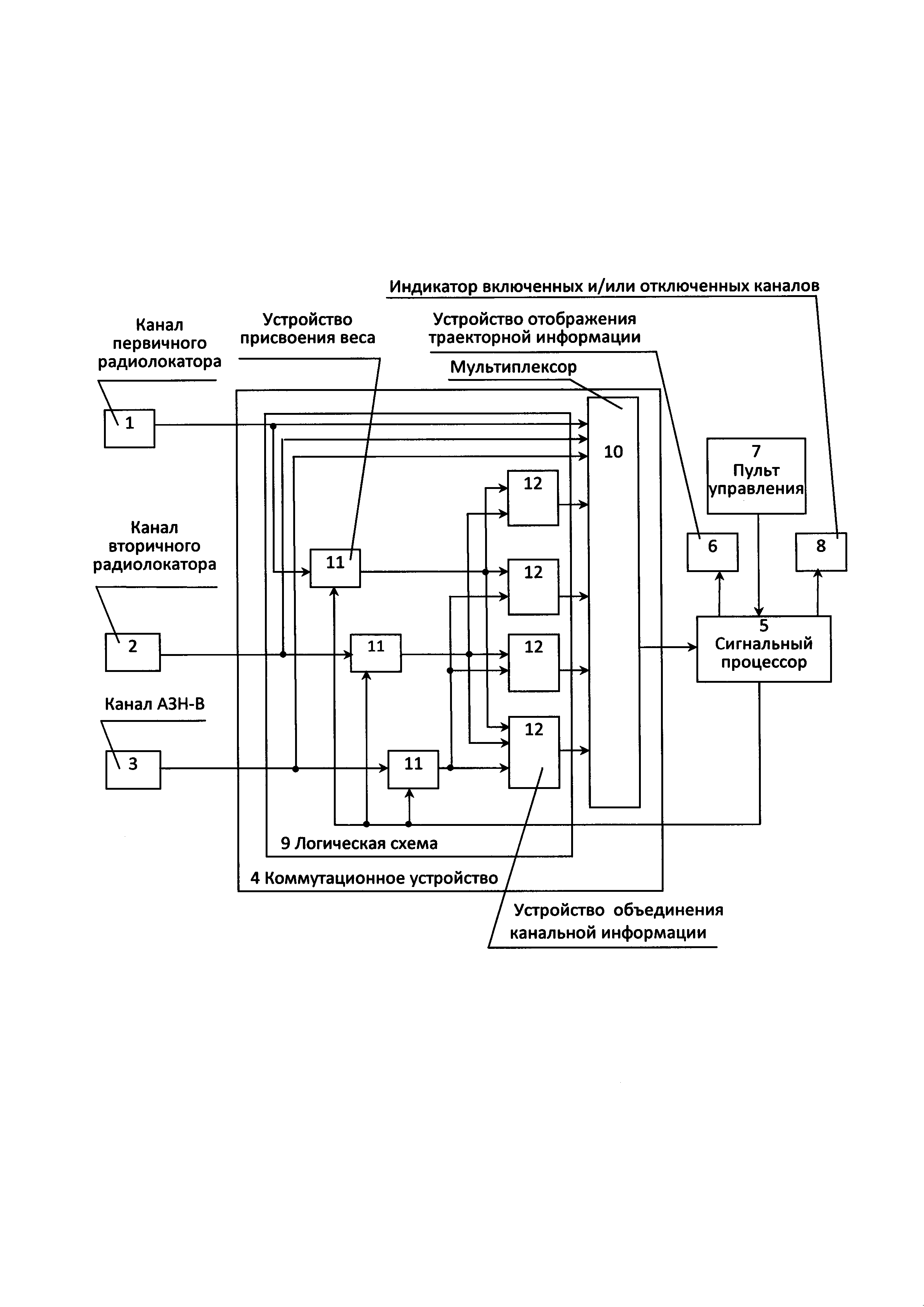
Многоцелевая самолетная антенно-фидерная система
Посадочный радиолокатор
Устройство обработки фазоманипулированных радиолокационных сигналов
Всенаправленная антенная система со специальной диаграммой направленности
Способ управления воздушным движением летательных аппаратов в районе аэродрома
Устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов
Посадочный радиолокатор
Устройство контроля мощности и ксвн свч трактов передатчиков

