Результат интеллектуальной деятельности: ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ МОНИТОРИНГА РЫБЫ В САДКАХ ПРЕДПРИЯТИЙ ИНДУСТРИАЛЬНОЙ АКВАКУЛЬТУРЫ
Вид РИД
Изобретение
Заявляемое устройство предназначено для определения состояния и параметров отдельных рыб и рыбных скоплений, выращиваемых в садках рыбоводных хозяйств.
Задача определения параметров рыб, является актуальной для предприятий аква- и марикультуры, использующих садковое разведение рыб. Для решения этих задач используют различные технические средства, в том числе оптические, индукционные, а также средства активной гидроакустической локации. Имеющиеся аппаратурные реализации могут определять параметры отдельных рыб и рыбных скоплений, но имеют существенные ограничения своих эксплуатационных характеристик. В связи с необходимостью проведения постоянного контроля состояния рыб находящихся в садках в течение длительных временных интервалов, необходима разработка систем, позволяющих работать автономно, без присутствия оператора. К этим системам, предъявляются специфические требования, а именно:
- возможность проведения длительного контроля состояния рыб в автоматическом режиме (без участия оператора;
- возможность определения состояния конструктивных элементов садка;
- выявление порывов сетного полотна и выдача при этом необходимой информации оператору;
- проведение контроля состояния рыб по всему объёму садка.
Имеются аппаратурные реализации, позволяющие автономно определять параметры рыб в течение длительных временных интервалов.
В патенте [1] предложена «Установка для автоматизированного определения вида и параметров рыбы», содержащая измерительный модуль, включающий видеокамеру с устройством подсветки, датчики наличия объекта и скорости его движения, а также компьютер с программным обеспечением. Модификация этой установки может определять параметры рыбы, находящейся в водоёме с прозрачной водой на участках протяжённостью до одного метра, расположенных непосредственно перед видеокамерой. Использование данной установки для определения параметров рыбы по всему объему реальных садков с протяжённостью единицы-десятки метров не представляется возможной.
В патенте [2] предложен «Способ определения плотности концентрации рыбы», выполняющий съемку с помощью лазерной подводной телевизионной системы со стробированием по дальности и подсчет визуально или с помощью компьютера числа рыб, наблюдаемых в кадре. При подсчете имеется возможность учитывать не только рыб, освещенных импульсом лазера, но и находящихся в объеме воды между телевизионной камерой и освещенной зоной. Расчет плотности концентрации рыб производят путем деления числа наблюдаемых рыб на величину объема сферического сектора, радиус которого равен произведению скорости света в воде на половину времени задержки строба открытия приёмника подводной телевизионной системы относительно момента излучения лазерного импульса, а угол раскрыва сектора соответствует углу зрения приёмника лазерной подводной телевизионной системы. Технический результат заключается в повышении достоверности результатов учета рыб, находящихся на границе подводного видения.
Данный способ, как и все оптические способы измерения, может использоваться только на участках прозрачной водной среды малой протяжённости, что ограничивает его эксплуатационные возможности.
Исландская фирма «Vaki Ltd» предлагает для определения и контроля средней биомассы, и распределения рыбы по весовым группам систему Vaki Biomass Counter [3], состоящую из рамки с размерами 595х655х215 мм и электронного блока. Рамка устанавливается в садок, и регистрирует проходящую через неё рыбу. Работа системы основана на использовании инфракрасных лучей, которые формируют решетку внутри рамки. Каждый раз, когда рыба проплывает через рамку, лучи прерываются, и создаётся изображение рыбы, которое используется для измерения её длины, толщины и веса. После обработки измерений, выполненных в течение длительного времени, получают также данные по прогнозу роста рыбы, параметрах изменения биомассы в каждой весовой группе, активности рыбы в различное время суток. По полученной информации, хозяйство может более рационально расходовать рыбные корма, выбирая оптимальные режимы кормления, своевременно сортировать рыбу и планировать дату отгрузки товарной рыбы.
К недостаткам системы следует отнести её ограниченные функциональные возможности, заключающие в том, что она регистрирует только рыбу, прошедшую через рамку. При больших размерах садка через рамку проходит только часть находящейся в садке рыбы. Кроме того одна и та же рыба может несколько раз проходить через рамку в различных направлениях или длительное время находиться в рамке. Всё это приводит к большим ошибкам в измерениях.
Наибольшее распространение для обнаружения рыб в водных акваториях, а также для определения их параметров, в том числе и находящихся в садках или в водоёмах малых размеров, получили гидроакустические системы активной локации [4].
Вариантами таких систем, которые могут определять параметры рыб в садках и малых акваториях, являются эхолоты Simrad EK15 [5] и Simrad EY60 [6], фирмы Kongsberg Maritime Subsea Simrad, Норвегия, содержащие блок управления, выход которого соединён с управляющими входами генераторного тракта, приёмного тракта, блока обработки и блока индикации; выход генераторного тракта и вход приёмного тракта соединены с акустической антенной, а выход приёмного тракта соединён через блок обработки с входом блока индикации. Блоки управления, обработки и индикации могут представлять собой отдельные аппаратурные реализации или программно-аппаратурные элементы персонального компьютера или ноутбука.
Блок управления вырабатывает периодически повторяющиеся синхроимпульсы, поступающие в генераторный тракт и разрешающие формирование в нём зондирующего сигнала, поступающего на акустическую антенну, излучающую в водную среду акустический зондирующий сигнал. Этот сигнал распространяется в среде лоцирования (воде), отражается от дна и от объектов находящихся в канале лоцирования. Отражённые эхоимпульсы принимаются той же акустической антенной, и соответствующие им электрические сигналы поступают на вход приёмного тракта, где осуществляется их обработка по заданному алгоритму (усиление, частотная фильтрация, изменение амплитудных соотношений в блоке «Временная автоматическая регулировка усиления (ВАРУ), преобразование аналогового сигнала в цифровой и другие операции) [4, 7]. С выхода приёмного тракта сигнал поступает на блок обработки, а затем на блок индикации, выдающий информацию о наличии, параметрах и количестве обнаруженной рыбы.
Рассматриваемые эхолоты контролируют только малую часть садка, порядка единиц процентов, что не позволяет получать достоверные значения параметров рыб, находящихся во всём объёме садка. Также для расположения эхолотов в садках необходимо использование дополнительных элементов крепления и стабилизации. При больших размерах садка, до 6-12 м, это связано со значительными сложностями. Кроме того такие эхолоты не позволяют получать информацию о возможных порывах сетного полотна по всему периметру садка. Наличие гидроакустических сигналов переотражённых от конструктивных элементов садков, зависимость расстояний до данных элементов при различных направлениях лоцирования, вызывают сложности при выделении и обработке эхосигналов от рыб, и не позволяют автоматизировать сам процесс лоцирования. Перечисленные причины ограничивают эксплуатационные возможности таких эхолотов при их использовании в садках.
Больший объём водной акватории садка могут контролировать многолучевые локационные системы, например, «Многолучевой научный эхолот для учёта водных биоресурсов» предложенный в патенте [8]. Он содержит блок управления, соединённый с управляющими входами генераторного тракта, приёмного тракта, блока формирования веера характеристик направленности, блока обработки, блока индикации, блока определения пространственного положения зон лоцирования и блока выбора режимов; акустическую антенну, соединённую с выходом генераторного тракта и с входом приёмного тракта, выход которого соединён с последовательно соединёнными блоком формирования веера характеристик направленности, блоком обработки и блоком индикации. Выход блока определения пространственного положения зон лоцирования соединён с блоком расчёта коэффициента уменьшения зоны обзора (Кузо), выход которого соединён с дополнительным входом блока обработки и с входом блока управления. Выход блока определения пространственного положения зон лоцирования соединён со вторым дополнительным входом блока обработки; выход блока выбора режимов соединён с входами генераторного и приёмного трактов, блоков формирования веера характеристик направленности, обработки и индикации. Эхолот может работать в различных режимах с различными направлениями секторов. Результаты лоцирования записываются в память ЭВМ. Постпроцессинговая обработка позволяет выполнять подсчёт обнаруженных рыб, построение гистограммы распределения её размеров, эхоинтегрирование (количественное определение биомассы). Многооконный режим позволяет представлять результаты лоцирования в различных вариантах, в том числе в виде 3D изображений.
Данный эхолот, однако, позволяет просматривать только порядка 10 процентов от всего объёма садка. Для его расположения в садке также необходимо использование дополнительных конструктивных элементов. Кроме того он не позволяет получать информацию о возможных порывах сетного полотна по всему периметру садка. Это ограничивает его эксплуатационные возможности по применению в садках.
В патенте [9] предложен «Эхолот и способ для оценки биомассы». Эхолот установлен на платформе, плавающей на поверхности водоема. Акустическая антенна эхолота располагается ниже ватерлинии, излучает в воду акустические сигналы, и принимает эхосигналы, отражённые от рыб и от дна садка. Результаты лоцирования, с помощью двунаправленного беспроводного блока связи по радиоканалу передаются в блок индикации, а также в блок обработки, который вырабатывает также сигналы управления эхолота.
Эхолот определяет величину биомассы рыб находящихся в садках или прудах, используемую затем для оптимизации процесса кормления рыб. Основная часть расходов, связанных с выращиванием рыбы, связана с расходами на корма и аэрацию, которые непосредственно связаны с общим количеством выращиваемой рыбы. Точные данные помогут оптимизировать расходы на питание и аэрацию.
В вариантах реализации настоящего изобретения выполняют лоцирование на частоте около 460 кГц. При оценке биомассы используют связь между её величиной и общей длительностью эхосигналов от рыбы с уровнями выше определенной пороговой амплитуды. Использование текущих настроек пороговой амплитуды и учёта эхосигналов до дальностей лоцирования порядка 35 м обеспечивало линейное соответствие между биомассой и общей продолжительностью эха с коэффициентом корреляции 0,93 в различных пробных водоемах.
К недостаткам данного эхолота относится сложность управления его передвижением для контроля полного объёма водного пространства садка. Кроме того при передвижениях эхолота постоянно меняется расстояние между антенной и дном садка, что вызывает необходимость в процессе лоцирования постоянно изменять протяжённость зоны регистрации эхосигналов от рыбы. Учитывая, что уровни эхосигналов от рыбы и от сетного полотна садка могут быть соизмеримы по уровням, автоматическое проведение этой операции не всегда возможно. При передвижении платформы в садке также происходит распугивание рыбы [10 c. 142-143], что приводит к дополнительным ошибкам при определении её параметров. На поверхности садков также могут располагаться дополнительные конструктивные элементы, препятствующие перемещению платформы. Всё это ограничивает эксплуатационные возможности эхолота.
В патенте [11] предложен «Акустический монитор биомассы», позволяющий выполнять измерения размеров рыб, её количество и общую биомассу. Эти параметры имеют большое значение для рыбоводных хозяйств, и точность их оценок и решения, принимаемые на основе этих оценок, оказывают существенное влияние на прибыльность хозяйств.
Система мониторинга рыбы представляет собой платформу, плавающую на поверхности воды. На платформе установлена гидроакустическая аппаратура, включающая в себя блок управления, акустический преобразователь, соединённый с генераторным и приёмным трактами, блок обработки, двунаправленный блок связи, выполненный в виде радиоканала. Платформа перемещается по поверхности воды садка, в соответствии с установленными навигационными данными. Устройство позиционирования платформы, которым может быть приемник DGPS, определяет её положение относительно периметра садка. Акустический преобразователь излучает в воду акустические зондирующие сигналы, и принимает эхосигналы, отражённые от рыбы и от дна садка. Данные лоцирования по радиоканалу передаются в блок вторичной обработки, а затем в блок индикации, конструктивно расположенные в отдельном внешнем блоке. После обработки получают данные по размерам отдельных рыб, плотности рыбы в садке, оценку её биомассы. Эти данные представляются в блоке индикации. Программное обеспечение обработки включает алгоритм калибровки, алгоритм измерения размера рыбы, алгоритм измерения биомассы и распределения плотности рыб в водной среде.
Данной системе присущи те же недостатки, что и системе предложенной в патенте [9].
Совместной разработкой фирм BioSonics Inc., США и BioMetrics AS of Kristiansund, Норвергия является система мониторинга биомассы аквакультуры (ABM) [12], имеющая наибольшее количество совпадающих признаков с заявляемым устройством, и позволяющая, по мнению авторов, выполнять оценку размера рыбы, её распределение по размерам, мониторинг поведения рыбы, находящейся в садках. Система обеспечивает операторов информацией о средних размерах рыбы в садке, её распределении по размеру в процессе цикла роста, позволяет обнаружить ненормальности в поведении рыбы.
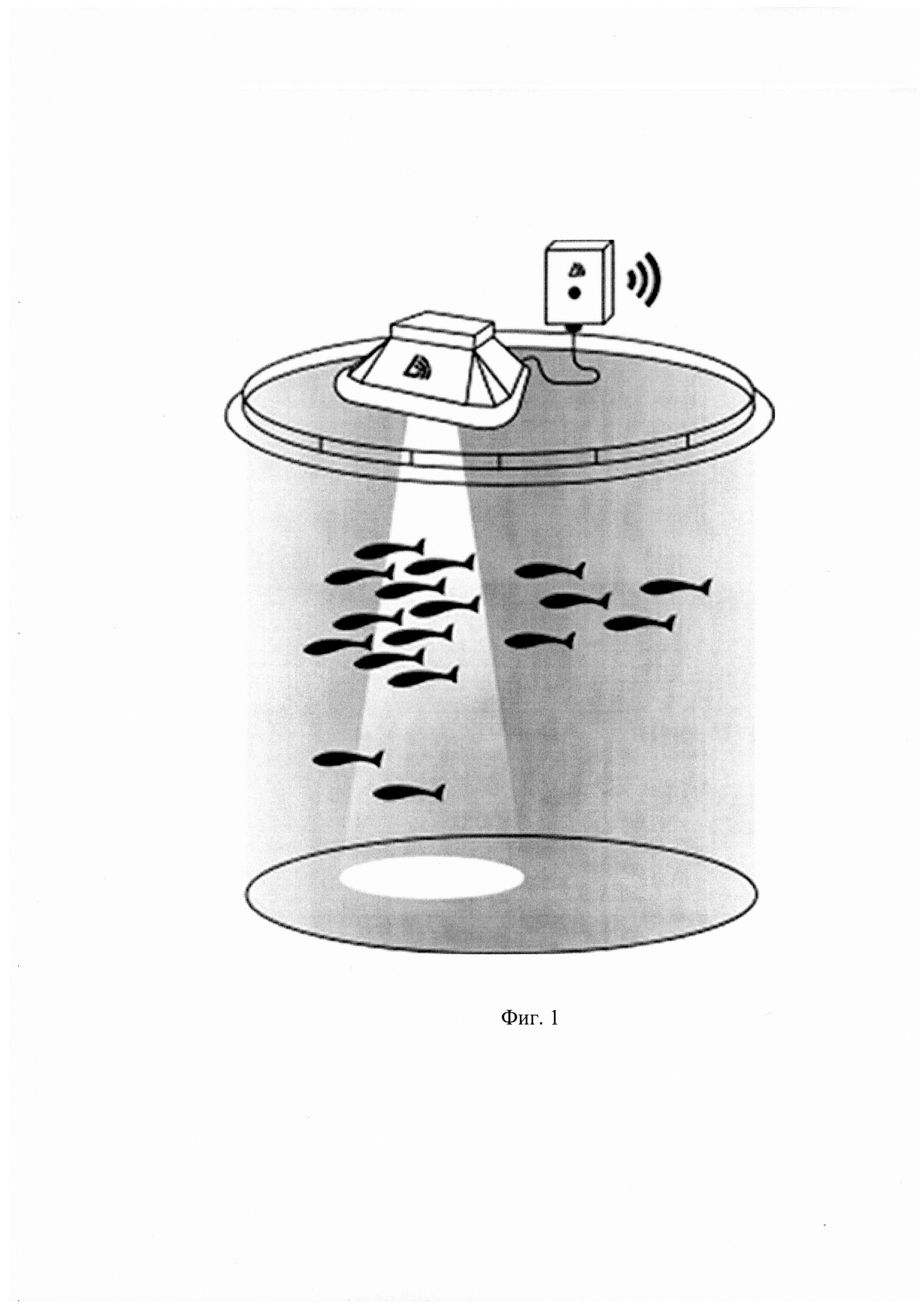
Система АВМ состоит из понтона, расположенного на поверхности воды в центральной части садка, как показано на фиг.1. На понтоне установлен активный эхолот, содержащий блок управления, выход которого соединён с управляющими входами генераторного тракта, приёмного тракта, блока первичной обработки и двунаправленного блока связи. Выход генераторного тракта и вход приёмного тракта соединены с акустической антенной, находящейся в акустическом контакте с водной средой садка и ориентированной излучающей поверхностью вниз. Выход приёмного тракта соединён через блок первичной обработки с двунаправленным блоком связи, в качестве которого используется радиоканал, или проводная линия связи. Блок вторичной обработки, блок хранения информационных признаков, а также блок индикации, конструктивно расположены во внешнем блоке.
Блок управления вырабатывает периодически повторяющиеся синхроимпульсы, поступающие в генераторный тракт и разрешающие выработку в нём электрических зондирующих сигналов, поступающих на акустическую антенну, излучающую в водную среду акустические зондирующие сигналы. Эти сигналы распространяются в среде лоцирования (воде), отражаются от дна садка и от рыб находящихся в канале лоцирования. Отражённые эхоимпульсы принимаются той же акустической антенной, и соответствующие им электрические сигналы поступают на вход приёмного тракта, где осуществляется их обработка по заданному алгоритму (усиление, частотная фильтрация, изменение амплитудных соотношений в блоке «Временная автоматическая регулировка усиления «ВАРУ», преобразование аналогового сигнала в цифровой) [7]. С выхода приёмного тракта сигнал поступает на блок первичной обработки, а затем в двунаправленный блок связи, в качестве которого используется система радиоканала (или проводная линия связи), передающий информацию о результатах лоцирования в блок вторичной обработки, а затем в блок хранения информационных признаков и в блок индикации, выдающий следующую информацию:
среднесуточный средний размер рыбы и её массу;
распределение рыбы по размерам;
вертикальное распределение плотности рыбы в реальном времени;
вертикальную стратификацию размера рыб в реальном времени;
параметры обнаружений рыб (до 50000 в день), включая глубину, размер рыб, скорость заплыва и время обнаружения.
На основе анализа результатов лоцирования выдаются предупреждения о побеге и ненормальностях в поведении рыб.
Система АВМ имеет следующие совпадающие признаки с заявляемым устройством: понтон, расположенный на поверхности воды в центральной части садка; на понтоне установлен активный эхолот, содержащий блок управления, выход которого соединён с управляющими входами генераторного тракта, приёмного тракта, блока первичной обработки и двунаправленного блока связи; выход генераторного тракта и вход приёмного тракта соединены с акустической антенной, находящейся в акустическом контакте с водной средой садка; выход приёмного тракта соединён через блок первичной обработки с двунаправленным блоком связи, соединённым также с блоком вторичной обработки, конструктивно расположенном во внешнем блоке, в котором также установлены блок хранения информационных признаков и блок индикации, причём выход блока вторичной обработки соединён с блоком хранения информационных признаков, выход которого соединён с входом блока индикации.
Система АВМ имеет недостатки, заключающиеся в том, что система контролирует только малую часть садка. Так, например, для стандартного садка [13] с размерами 6х6х3 метра это не более 0,8% от его общего объёма. При установке системы в садок необходима ручная настройка протяжённости зоны регистрации эхосигналов от рыбы, определяемая величиной глубины садка. Система не может выявлять порывы и другие нарушения сплошности сетного полотна по всему периметру садка. Система не определяет наличие осадков корма и павшей рыбы по всей поверхности дна садка. Перечисленные недостатки ограничивают эксплуатационные возможности системы АВМ.
Целью предлагаемого устройства является расширение эксплуатационных возможностей.
Технический результат достигается тем, что в заявляемом устройстве выполняется лоцирование практически всего водного объёма садка в долговременном автоматическом режиме.
Для достижения технического результата в гидроакустическую систему для определения параметров рыб (система АВМ), содержащую понтон, расположенный на поверхности воды в центральной части садка; установленный на понтоне активный эхолот, содержащий блок управления, соединённый с управляющими входами генераторного тракта, приёмного тракта, блока первичной обработки и двунаправленного блока связи; выход генераторного тракта и вход приёмного тракта соединены с акустической антенной, находящейся в акустическом контакте с водной средой садка; выход приёмного тракта соединён через блок первичной обработки с двунаправленным блоком связи; блок вторичной обработки, блок хранения информационных признаков и блок индикации, конструктивно расположенные во внешнем блоке, дополнительно во внешний блок установлены: блок внутренней связи, соединённый с двунаправленным блоком связи, блоком вторичной обработки, блоком хранения информационных признаков и блоком индикации, а также дополнительно установлены блок хранения результатов лоцирования, блок выделения эхосигналов от периметра садка, блок построения и хранения акустического образа садка и блок ввода-вывода, соединённые также с блоком внутренней связи; а в активный эхолот дополнительно установлены механически связанные с акустической антенной блок сканирования и блок датчиков ориентации, соединённые также с блоком управления.
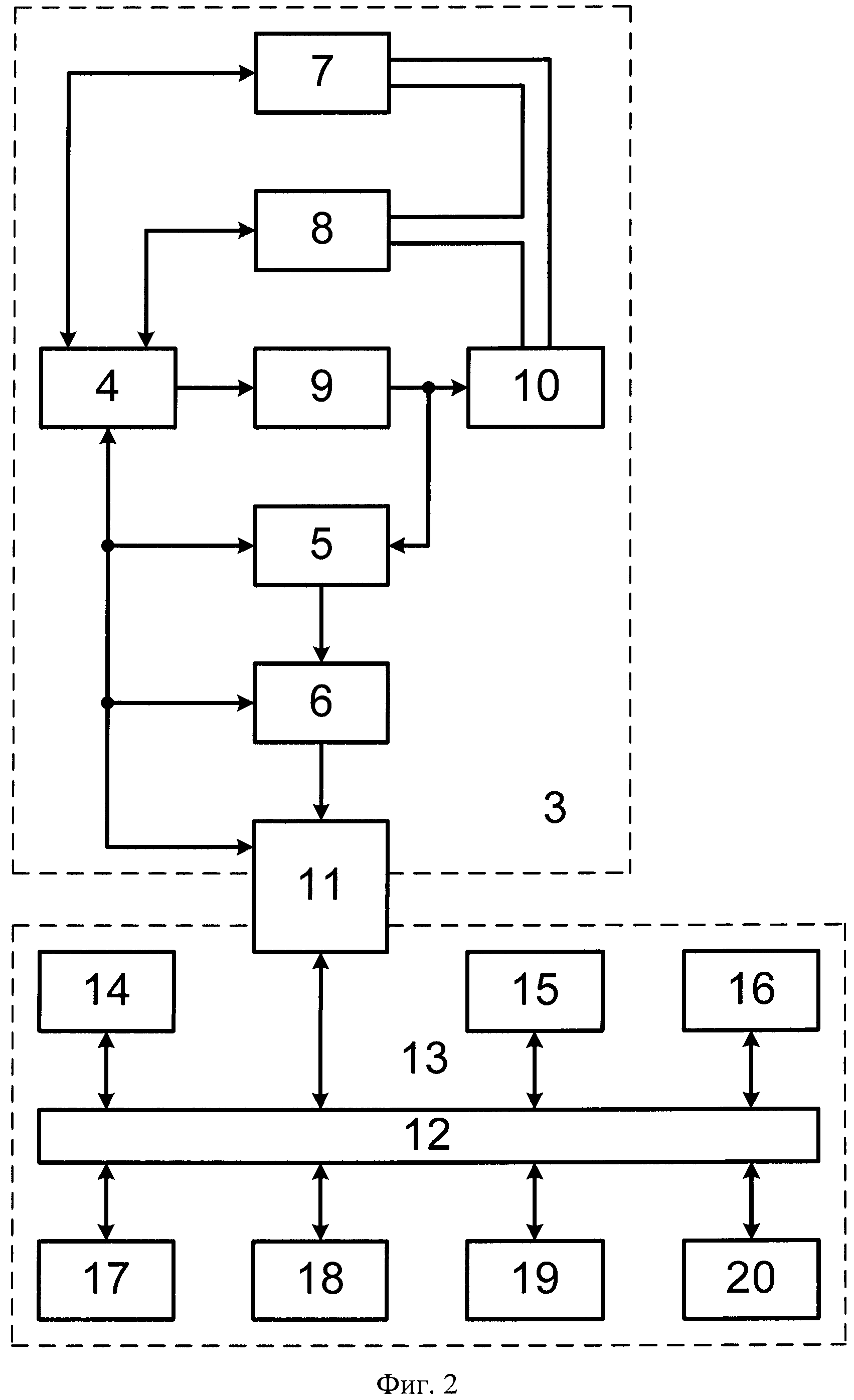
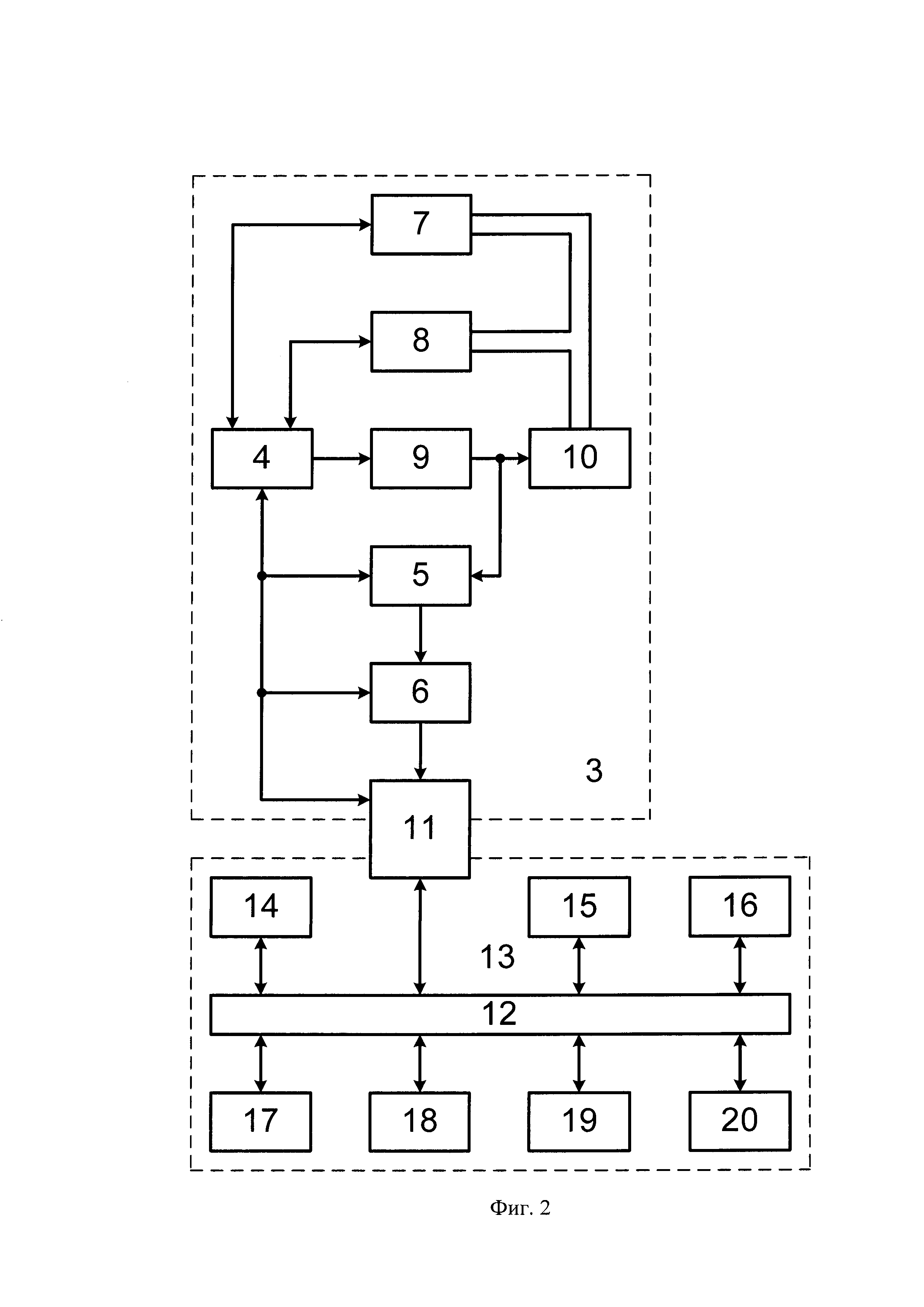
Изобретение поясняется чертежами. На фиг. 1 показано расположение в садке прототипа (система АВМ), на фиг. 2 - функциональная схема заявляемого устройства, на фиг. 3 - вариант реализации структурной схемы приёмного тракта, на фиг. 4 - расположение сечений контролируемых зон с учётом их взаимного перекрытия.
Предлагаемое устройство содержит понтон 1, располагаемый на водной поверхности садка 2 в его центральной части. На понтоне расположен активный эхолот 3, содержащий блок управления 4, соединённый с приёмным трактом 5, блоком первичной обработки 6, блоком сканировании 7, блоком датчиков ориентации 8 и генераторным трактом 9, выход которого соединён с сигнальным входом приёмного тракта 5 и акустической антенной 10, находящейся в акустическом контакте с водной средой садка и механически соединённой с блоком сканирования 7 и блоком датчиков ориентации 8. Блок первичной обработки 6 с помощью двунаправленного блока связи 11 соединён с блоком внутренней связи 12, расположенном во внешнем блоке 13 и соединённом с блоком хранения результатов лоцирования 14, блоком выделения эхосигналов от периметра садка 15, блоком построения и хранения акустического образа садка 16, блоком вторичной обработки 17, блоком хранения информационных признаков 18, блоком индикации 19 и блоком ввода-вывода 20.
Блок управления 4 вырабатывает периодически повторяющиеся синхроимпульсы, поступающие в генераторный тракт 9 и разрешающие выработку в нём электрических зондирующих сигналов, поступающих на акустическую антенну 10, излучающую в водную среду акустические зондирующие сигналы. Эти сигналы распространяются в среде лоцирования (воде), отражаются от дна садка (или водоёма) и от рыб находящихся в канале лоцирования. Отражённые эхоимпульсы принимаются той же акустической антенной 10, и соответствующие им электрические сигналы поступают на вход приёмного тракта 5, где осуществляется их обработка по заданному алгоритму (усиление, частотная фильтрация, изменение амплитудных соотношений в блоке «Временная автоматическая регулировка усиления «ВАРУ», преобразование аналогового сигнала в цифровой) [7]. Коммутатор, который обычно присутствует в эхоимпульсных лоцирующих системах [7 с. 181], на структурной схеме фиг. 2 в виде отдельного блока не показан, а его элементы являются составными частями генераторного 9 и приёмного 5 трактов.
На фиг. 3 показана структурная схема варианта реализации приёмного тракта 5. Он содержит последовательно соединённые элементы коммутатора 21, блок согласования импедансов 22, усилитель аналоговых сигналов с регулируемым коэффициентом усиления 23, частотные фильтры 24, аналого-цифровой преобразователь (АЦП) 25, блок цифровой фильтрации 26 и блок децимации цифровых пакетов 27. Управляющие входы усилителя 23, АЦП 25, блока цифровой фильтрации 26 и блока децимации 27 соединены с выходами блока управления 4.
Электрические сигналы, соответствующие акустическим эхоимпульсам с элементов акустической антенны 10 через элементы коммутатора 21 поступают на блок согласования импедансов 22, представляющий собой обычно повторитель с высоким входным сопротивлением и низким выходным. Для компенсации ёмкостной реактивной составляющей элементов акустической антенны он может иметь также индуктивные элементы. Элементы коммутатора 21 выполняют ограничение уровня зондирующего сигнала, поступающего на вход приёмного тракта. С выхода блока 22 аналоговые эхосигналы поступают на усилитель 23, где выполняется их усиление с коэффициентом усиления, изменяемом во времени по закону К(t), позволяющему компенсировать ослабление акустических сигналов при их распространении за счёт поглощения в среде лоцирования и дифракционного расхождения. Усилитель 23 выполняет, так называемую, регулировку ВАРУ. Сигнал, изменяющий коэффициент передачи усилителя 23 и поступающий на его управляющий вход, вырабатывается в блоке управления 4. Этот сигнал также устанавливает значение начального коэффициента передачи усилителя 23, соответствующее началу цикла лоцирования. В частотном фильтре 24 выполняется выделение спектральных составляющих зондирующего сигнала и эхосигналов.
После усилителя 23 и частотного фильтра 24 аналоговые сигналы поступают на вход АЦП 25, где преобразуются в цифровую форму. Цифровые сигналы с выхода АЦП 25 после дополнительной цифровой фильтрации в блоке 26 и децимации в блоке 27 [22, с. 203], поступают на блок первичной обработки 6. Эти сигналы будут представлять собой последовательность зондирующего сигнала, эхосигналов и шумовую составляющую, являющуюся аддитивной суммой собственных шумов приёмного тракта 5 и сигналов обусловленных акустическими шумами в канале лоцирования. В блоке первичной обработки 6 выполняется выделение зондирующего сигнала и эхосигналов на фоне шумов и их передача через двунаправленный блок связи 11, в блок внутренней связи 12, конструктивно расположенном во внешнем блоке 13. С блока внутренней связи 12 сигналы записываются в блок 14, где выполняется их хранение в виде массива записей сигналов для последовательности циклов лоцирования и последующая передача в остальные блоки устройства. Возможна реализация приёмного тракта 5 с аппаратурным подавлением зондирующего сигнала, поступающего на его вход. Однако в этом случае всё равно остаются сигналы обусловленные послезвучанием акустической антенны и объёмной реверберацией акустического сигнала в среде лоцирования [7], расположенные непосредственно после зондирующего сигнала и обычно сливающиеся с ним.
В блоке выделения эхосигналов от периметра садка 15 происходит чтение и обработка данного массива записей зондирующих сигналов и эхосигналов для последовательности циклов лоцирования. При этом возможно использование двух вариантов алгоритмов обработки этого массива.
В первом случае заявляемая система устанавливается в садок 2, в котором отсутствует рыба. Блок сканирования 7 последовательно изменяет ориентацию акустической антенны 10, так чтобы было выполнено лоцирование всего внутреннего периметра садка. Эхосигналы каждого цикла лоцирования, получаемые при этом, будут состоять из последовательности зондирующего сигнала, эхосигнала от периметра садка (сетное полотно или другие конструктивные элементы садка), отстоящего от зондирующего сигнала на временной интервал Δt1 и сигналов от переотражений зондирующего сигнала. При этом для каждого цикла лоцирования эхосигнал от периметра садка будет следующим за зондирующим сигналом. Этот сигнал выделяется, определяются его параметры, которые передаются в блок 16, где выполняется их хранение. Одновременно в блоке датчиков ориентации 8 для каждого цикла лоцирования вырабатываются сигналы, характеризующие направление, по которому в данный момент выполняется лоцирование. Эти сигналы поступают в блок управления, а затем через двунаправленный блок связи 11 и блок внутренней связи 12 параметры этих сигналов передаются также в блок 16, записываются там, и хранятся совместно с параметрами эхосигналов от периметра садка. Таким образом, в блоке 16 получаем, так называемый акустический образ садка, представляющий собой массив параметров эхосигналов от внутреннего периметра садка и сигналов, характеризующих направления выполняемых при этом лоцирований. Данные этого массива используются затем для определения дистанций, на которых выполняется регистрация эхосигналов от рыбы для каждого направления лоцирования.
Для построения этого массива при отсутствии в садке рыбы достаточно выполнения однократного процесса лоцирования, для каждого из направлений, охватывающих полный внутренний периметр садка.
Для разных направлений лоцирования в блоке датчиков ориентации 8 вырабатываются сигналы, позволяющие с высокой точностью регистрировать параметры этих направлений. Наличие блока датчиков ориентации 8 позволяет понизить требования к точности позиционирования акустической антенны 10 перемещаемой в пространстве блоком сканирования 7, и использовать для этой цели простые и недорогие механические системы, например системы, предложенные в патентах [17, 18]. Также снижаются требования к точности первоначальной юстировки акустической антенны 10 при её установке на элементы блока сканирования 7.
Во втором случае, когда система устанавливается в садок, в котором уже есть рыба, лоцирование для каждого направления выполняют многократно, и из полученных последовательностей эхограмм выделяют эхосигналы от периметра садка. При этом учитывают, что эхосигналы от рыбы для разных циклов лоцирования меняют своё расположение на эхограммах, а эхосигналы от периметра садка будут расположены на одном и том же месте. Используя корреляционные [14] или другие способы обработки эхограмм, выделяют эхосигналы от периметра садка. При этом надёжность их выделения для каждого направления будет тем выше, чем большее количество лоцирований по каждому направлению будет проведено и, чем меньшее количество рыбы находится в садке. При реально используемой плотности рыбы до 20-40 шт/м3 [15] обычно достаточно проведение 8-12 лоцирований для каждого направления.
Данные акустического образа садка с блока 16 поступают в блок вторичной обработки 17, куда также с блока 14 поступают все эхограммы, полученные при лоцировании. В результате совместной вторичной обработки массивов эхограмм и акустического образа садка получают следующие данные:
количество обнаруженных рыб;
распределение рыбы по размерам;
среднесуточный средний размер рыбы и её массу;
оценка биомассы рыбы;
вертикальное и горизонтальное распределение рыбы;
вертикальное распределение плотности рыбы в реальном времени;
информацию о поведении рыб в садке (направление и скорость перемещения).
На основе анализа результатов лоцирования выдаются предупреждения о побеге и изменениях в поведении рыб.
Эти данные поступают в блок хранения информационных признаков 18, где выполняется их долговременное хранение.
Так как в системе выполняется лоцирование всего внутреннего периметра садка, и данные о результатах этого лоцирования сохраняются в блоке 16, то возникающие изменения акустических характеристик садка, вызванные, например, порывами его сетного полотна, будут обнаружены, и соответствующая информация также будет передана в блок 18.
Полученная информация поступает в блок индикации 19, и может быть представлена оператору по его запросу в различном виде. Например, в виде эхограмм, гистограмм, таблиц, графиков, а также в виде 3D изображений внутреннего периметра садка и распределения рыбы в садке для разных временных интервалов. Кроме того в блок индикации 19 может передаваться дополнительная информация с системы датчиков (на фиг.2 не показана), которая является для садков обязательной в различных вариантах. Это могут быть датчики температуры, насыщения воды садка кислородом и другие.
Полученная информация с помощью блока ввода-вывода 20 может быть передана в системы автоматики садка, выполняющие, например, автоматизированное кормление рыбы, поддержание необходимого температурного режима в садке, включение сигналов тревоги при нарушении целостности садка, при необычном поведении рыбы и другие операции. С помощью блока 20 также вводят в систему исходные параметры, включающие габариты и другие конструктивные особенности садка, начальное количество и вид рыбы в садке, количество рыбы отобранной из садка.
Предложенная система позволяет автоматически настраиваться под различные виды садков, и при долговременной работе не требует постоянного присутствия оператора. Она позволяет просматривать весь объём садка, а также весь его внутренний периметр, обнаруживать, нарушения сплошности садка, проникновения в него хищников. Позволяет регистрировать заболевания и различные неадекватные поведения рыб.
Практическая реализация предложенной системы не представляет сложностей. В качестве активного эхолота 3 может использоваться, например, портативный многоцелевой исследовательский однолучевой эхолот с расщеплённым лучом МИЭЛ [16], разработанный в КБ морской электроники «Вектор», или более простой эхолот с рабочей частотой, находящейся в диапазоне 150-500 кГц. Блок сканирования 7 может быть реализован, например, на основе змеевидных механических систем, предложенных в патентах [17-18], а блок датчиков ориентации может быть выполнен с использованием микросхем позиционирования FIS1100 [19] компании Fairchild, KMX61 компании Kionix Inc, ADXL345 компании Analog Devices [20] и других. В качестве внешнего блока 13 может использоваться стандартная ЭВМ с соответствующими программными модулями и аппаратурными реализациями, соединённая с монитором (блок индикации 19). Блок 11 может быть реализован в виде радиоканала или в виде проводной линии связи, блок 20 может представлять собой COM, USB или Ethernet порты ЭВМ, а блок 12 - внутреннюю шину ЭВМ.
Рассмотрим один из возможных вариантов работы комплекса.
Комплекс выполняет k лоцирований в направлении, определяемом положением акустической антенны. После этого блок сканирования изменяет положение акустической антенны в пространстве, и выполняется k лоцирований по новому направлению. Такие циклы лоцирования и изменения положения акустической антенны будут повторяться до полного обзора объёма водной акватории контролируемого садка.
Время Т, затрачиваемое при этом будет равно
Т = N(k*Δt1+Δt2),
где N - число направлений лоцирования,
k - число выполняемых циклов лоцирования для каждого направления,
Δt1 - время, затрачиваемое на выполнение одного лоцирования, равное без учёта переотражений 2r/c (r -наибольшее расстояние лоцирования от акустической антенны до периметра садка, с - скорость распространения акустического сигнала в водной среде садка, равная примерно 1500 м/с),
Δt2 - время, затрачиваемое на перемещение акустической антенны в пространстве.
Число направлений лоцирования N определим для варианта использования в качестве акустической антенны круглого плоского поршневого преобразователя диаметром d, имеющем равномерное распределение амплитуд смещений. Диаграмма направленности такой антенны описывается выражением [21, с. 22]
P(β) = 2I1[(πdsinβ)/λ]/[(πdsinβ)/λ],
где β - угол между осью антенны и направлением излучения,
I1 - функция Бесселя первого порядка,
λ - длина волны акустического зондирующего сигнала.
Величина угла α для данной антенны, соответствующая значениям P(β) = 0.7 приблизительно будет равна [7, с.95]
α = 60°(λ/d).
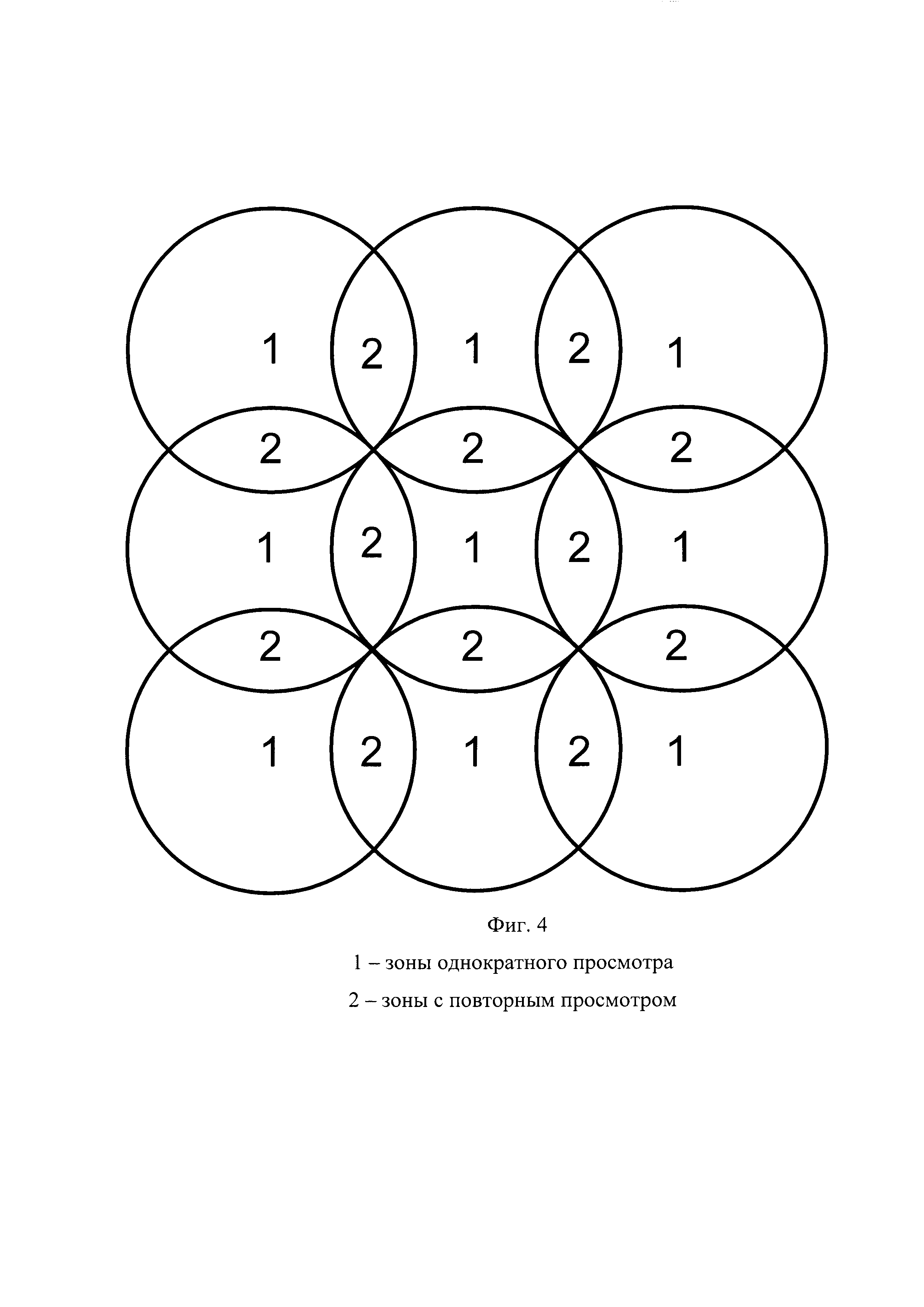
Число N рассчитаем как отношение угла раскрыва полусферы, к объёмному углу α диаграммы направленности акустической антенны на уровне 0.7. При этом будем учитывать частичные перекрытия просматриваемых зон, как показано на фиг. 4, необходимые для устранения пропусков контролируемых объёмов. Получим, что
N = π/tg2(α/2).
Рассчитаем значения времени Т для нескольких конкретных случаев.
1. Имеем садок с размерами 6х6х4 м. Акустическая антенна расположена в центральной части садка и имеет ширину диаграммы направленности α = 20°. Время Δt2 = 2с. Число повторений циклов лоцирования для каждого направления k = 1.
Получим, что r max = 5 м, Δt1 max = 6.7 мс, N = 104.
Время, затрачиваемое на лоцирование всего объёма садка (с округлений до целых значений) будет равно Т = 104 (2 + 0.0067) = 209 с. При увеличении количества повторений циклов лоцирования до k = 10 получим, что Т = 104 (2 + 10*0.0067) = 215 с, то есть общее время обзора пространства садка изменится незначительно.
2. Садок с размерами 60х60х6 м. Остальные параметры остались без изменений. Получим, что r max = 30.2 м, Δt1 max = 41 мс, N = 104.
При k = 1 время Т = 104 (2 + 0.041) = 213 с. При увеличении количества повторений циклов лоцирования до k = 10 получим, что Т = 104 (2 + 10*0.041) = 251 с. При увеличении размеров садка время Т изменилось незначительно, так как основной вклад в его значение вносит время Δt2 изменения положения акустической антенны.
Уменьшение значений времени Δt2 возможно за счёт разработки такого алгоритма программы по перемещению акустической антенны, при котором она за один цикл изменяет своё положение только по какой-либо одной оси, и переходит на одно соседнее положение. Кроме того в качестве исполнительных механизмов в блоке сканирования комплекса возможно использование шаговых двигателей, имеющих малую инерционность и высокое быстродействие.
В КБ морской электроники «Вектор» разработаны различные варианты активных эхолотов [16], натурные испытания которых показали, что они могут быть использованы в заявляемом устройстве. Также разработаны программные модули по вторичной обработке результатов гидролокационных исследований одиночных рыб и рыбных скоплений, позволяющие выполнять подсчёт количества обнаруженных рыб с учётом пропущённых и повторно просмотренных зон контроля, построение их размерного ряда, расчёт биомассы, пространственное распределение и другие параметры [23-29]. Натурные испытания данных аппаратурных реализаций и программных модулей показали достоверность и высокую надёжность получаемых результатов при определении параметров как отдельных рыб, так и рыбных скоплений находящихся в садках и в водных акваториях с различными глубинами и ограничивающими поверхностями.
Источники информации
1. Патент RU113843 «Установка для автоматизированного определения вида и параметров рыбы», МПК G01N21/00, A22C25/04, заявка 20111396/28 от 30.09.2011, опубликован 27.02.2012.
2. Патент RU2167434 «Способ определения плотности концентрации рыбы», МПК G01S17/00, заявка 96102697/09 от 26.01.1966, опубликован 20.05.2001.
3. https://docplayer.net/22022709-Vaki-manual-english.html
4. Орлов Л.В., Шабров А.А. Гидроакустическая аппаратура рыбопромыслового флота. - Л.: Судостроение, 1987. - 223с.
5. http://www.simrad.com/ek15
6. http://www.simrad.com/ey60
7. Кобяков Ю.С., Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л. Судостроение, 1986. - 272 с.
8. Патент RU178905 «Многолучевой научный эхолот для учёта водных биоресурсов» МПК G01S15/96, заявка 2018100863, от 10.01.2018, опубликован 23.04.2018.
9. Патент US20080068926 «Underwater biomass assessment device and method», «Эхолот и способ для оценки биомассы», МПК G01S15/88, G03В42/06 заявка 11/691,481 от 26.03.2007, опубликован 20.03.2008.
10. Юданов К.И. Гидроакустическая разведка рыбы. - СПб. Судостроение, 1992. - 192с.
11. Патент US20060018197 «Acoustic biomass monitor», «Акустический мониторинг биомассы» МПК G01S15/96, заявка 10/894.887 от 20.06.2004, опубликован 26.01.2006.
12. http://www.biosonicsinc.com/products/aquaculture-biomass-monitor/
13. https://fish-farming.ru/535/
14. Горбань И.И. Обработка гидроакустических сигналов в сложных динамических условиях. - Киев. Наукова думка, 2008. - 276 с.
15. Козлов В.И. Справочник фермера-рыбовода. - М. Изд. ВНИРО, 1998. - 342 с.
16. http://www.vector-marine.ru/rus/news25.htm
17. Патент RU2301143 «Змеевидная рука робота» МПК B25J18/06, B25J9/06, B25J17/00, , заявка 2004100836/02, от 12.06.2002, опубликован 20.06.2007.
18. Патент RU2259916 «Гибкий манипулятор» МПК B25J18/06, заявка 2003103649/02, от 06.02.2003, опубликован 10.09.2005.
19. https://www.fairchildsemi.com/datasheets/FI/FIS1100.pdf
20. www.analog.com
21. Евтютов А.П., Митько В.Б. Инженерные расчёты в гидроакустике. - Л. Судостроение, 1988. - 288 с.
22. Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обработка сигналов. Справочник. - М. Радио и связь, 1985. - 312 с.
23. Программный модуль «Эхосчёт». Свидетельство о государственной регистрации программ для ЭВМ №2017660829, регистрация 27.09.2017.
24. Программный модуль «Эхосчёт». Свидетельство о государственной регистрации программ для ЭВМ №2017660829, регистрация 27.09.2017.
25. Программный модуль поштучного подсчёта рыбы. Свидетельство о государственной регистрации программ для ЭВМ № 2016616070, регистрация 03.06.2016.
26. Программное обеспечение постпроцессинговой обработки результатов подсчёта рыб. Версия 2.0. Свидетельство о государственной регистрации программ для ЭВМ № 2016611489, регистрация 03.02.2016.
27. Программный модуль «Селектор донного сигнала». Свидетельство о государственной регистрации программ для ЭВМ № 2017660862, регистрация 28.09.2017.
28. Программный модуль «Селектор одиночных целей». Свидетельство о государственной регистрации программ для ЭВМ № 2017660865, регистрация 28.09.2017.
29. Программный модуль «Эхоинтегрирование». Свидетельство о государственной регистрации программ для ЭВМ № 2017662474, регистрация 09.11.2017.
Гидроакустический комплекс для мониторинга рыбы в садках предприятий индустриальной аквакультуры, содержащий понтон, расположенный на поверхности воды в центральной части садка; установленный на понтоне активный эхолот, содержащий блок управления, соединённый с приёмным трактом, блоком первичной обработки, двунаправленным блоком связи и генераторным трактом, выход которого соединён с входом приёмного тракта и с акустической антенной, находящейся в акустическом контакте с водной средой садка; выход приёмного тракта соединён через блок первичной обработки с двунаправленным блоком связи; блок вторичной обработки, блок хранения информационных признаков и блок индикации, конструктивно расположенные во внешнем блоке; отличающийся тем, что во внешнем блоке дополнительно установлены: блок внутренней связи, соединённый с двунаправленным блоком связи, блоком вторичной обработки, блоком хранения информационных признаков и блоком индикации, а также блок хранения результатов лоцирования, блок выделения эхосигналов от периметра садка, блок построения и хранения акустического образа садка и блок ввода-вывода, соединённые также с блоком внутренней связи; а в активный эхолот дополнительно установлены механически связанные с акустической антенной блок сканирования и блок датчиков ориентации, соединённые также с блоком управления.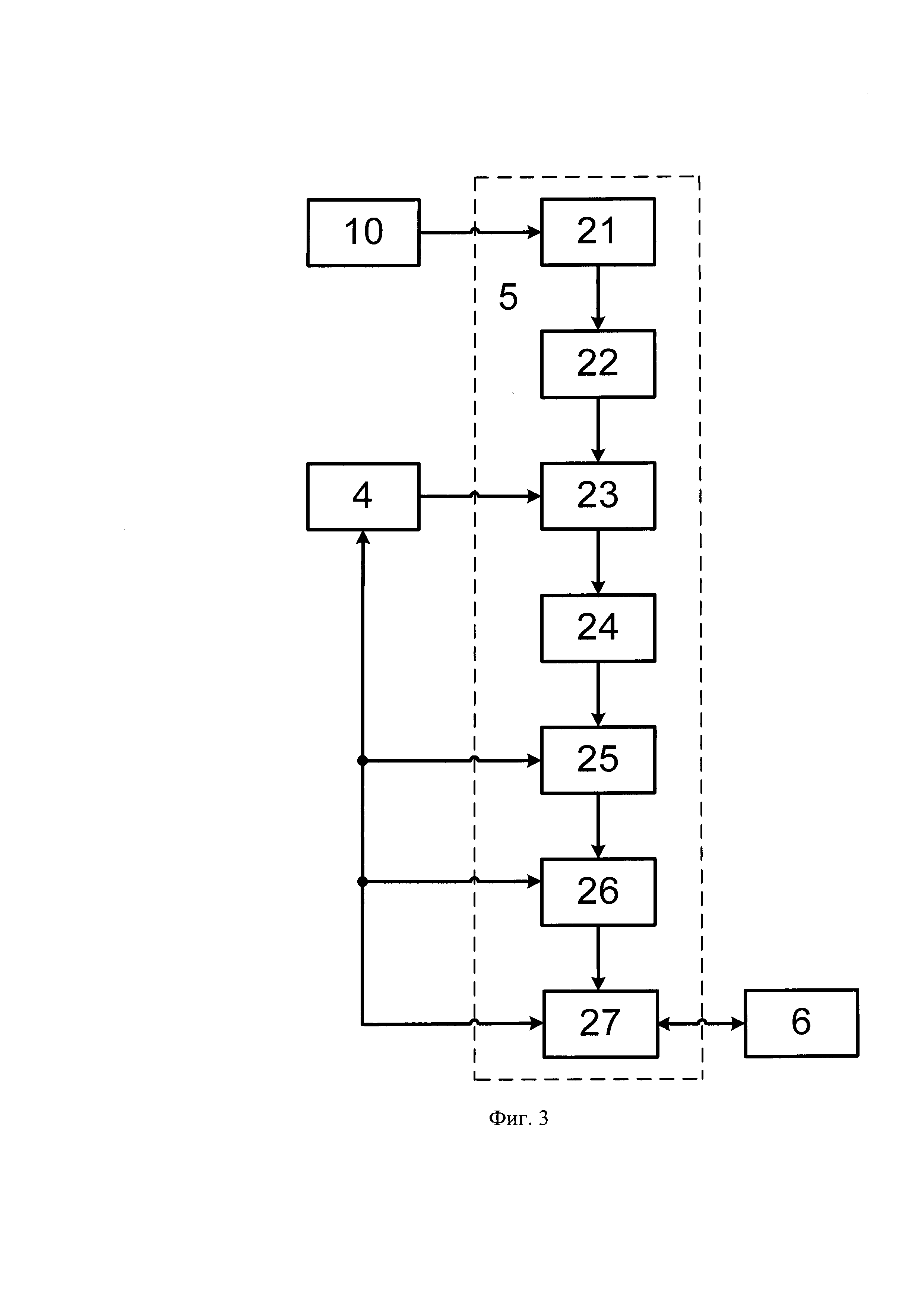
Устройство для подсчета рыбы
Прибор для демонстрации свойств упругих волн
Прибор для демонстрации свойств упругих волн
Генератор зондирующих сигналов
Параметрический профилограф
Термоакустический излучатель
Устройство для поиска и подсчёта рыбы
Излучающий тракт параметрического гидролокатора
Генераторный тракт параметрического гидролокатора
Способ переработки зернового сырья с получением этанола, белкового продукта и глютена
Вакуумный искровой разрядник

