Результат интеллектуальной деятельности: НАСОСНЫЙ УЗЕЛ И СПОСОБ УПРАВЛЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[1] Данное изобретение относится в целом к насосным узлам, а в частности, к управляемым по скорости циркуляционным насосам с мокрыми роторами и способу управления приводным электродвигателем, предназначенным для привода такого насоса. Такие насосы в диапазоне мощности от 5 Вт до 3 кВт в типичном случае используются в качестве циркуляционных насосов систем отопления жилых домов.
УРОВЕНЬ ТЕХНИКИ
[2] Общая цель проектирования насоса состоит в как можно большем снижении общей потребляемой мощности. Управляемые по скорости циркуляционные насосы с мокрыми роторами обычно содержат преобразователь частоты, конфигурация которого обеспечивает привод электродвигателя с желаемой скоростью, соответствующей требуемой мощности перекачки. Чтобы осуществить привод электродвигателя с помощью сигнала широтно-импульсной модуляции, имеющего синусоидальную форму, частота переключений преобразователя частоты должна быть высокой, что вносит потери при переключениях в преобразователе частоты.
[3] В документе EP 2133991 описан управляемый по скорости насос, в котором входное напряжение, подаваемое в преобразователь частоты, адаптируется преобразователем напряжения к требуемому выходному напряжению с целью достижения максимального индекса модуляции для минимизации потерь при переключениях в преобразователе частоты.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[4] В отличие от таких известных насосов, варианты осуществления данного изобретения обеспечивают насосный узел с дополнительно сниженной потребляемой мощностью.
[5] В соответствие с первым аспектом данного изобретения, предложен насосный узел, содержащий насосный блок, приводной электродвигатель, предназначенный для привода насосного блока, и блок управления, предназначенный для управления приводным электродвигателем. Блок управления содержит преобразователь частоты, преобразователь напряжения и контроллер, причем конфигурация преобразователя напряжения обеспечивает подачу входного напряжения Uвх в преобразователь частоты, при этом входное напряжение является регулируемым в пределах диапазона напряжения между минимальным входным напряжением Uмин и максимальным входным напряжением Uмакс. Конфигурация контроллера обеспечивает определение фактической потребляемой мощности, по меньшей мере, одного из приводного электродвигателя, преобразователя частоты и преобразователя напряжения во время эксплуатации насосного блока, и обеспечивает настройку входного напряжения в зависимости от определяемой фактической потребляемой мощности во время эксплуатации насосного блока. Контроллер может быть частью преобразователя частоты или преобразователя напряжения или отдельным компонентом блока управления.
[6] По выбору, конфигурация контроллера может обеспечивать определение фактической совокупной потребляемой мощности приводного электродвигателя, преобразователя частоты и преобразователя напряжения, а также настройку входного напряжения в зависимости от определяемой фактической совокупной потребляемой мощности. Вследствие этого, можно минимизировать не только потери при переключениях в преобразователе частоты, но и потери при преобразовании в преобразователе напряжения, а также потери мощности в электродвигателе.
[7] По выбору, подобная конфигурация контроллера может обеспечивать настройку входного напряжения таким образом, что фактическая потребляемая мощность минимизируется. Чтобы достичь этого, можно применить алгоритм минимальных потерь мощности (МПМ) для нахождения оптимального входного напряжения с целью достижения самой низкой потребляемой мощности совокупной системы, содержащей приводной электродвигатель, преобразователь частоты и преобразователь напряжения. Например, алгоритм МПМ может предусматривать увеличение входного напряжения от U0 до U1 и сравнение потребляемой мощности P0 при U0 и потребляемой мощности P1 при U1. Если потребляемая мощность P1 при U1 меньше, чем потребляемая мощность P0 при U0, входное напряжение можно дополнительно увеличить до U2. Если потребляемая мощность P1 при U1 больше, чем потребляемая мощность P0 при U0, входное напряжение можно уменьшить от U0 до U'1, а затем дополнительно уменьшить до U'2, если потребляемая мощность снижена на величину ΔP от U0 до U'1. Этот процесс можно итеративно повторять с постоянным шагом ΔU=U0-U1=U1-U2=… или - предпочтительно - переменным шагом ΔU=ƒ(ΔP) для того, чтобы как можно быстрее найти оптимальное входное напряжение с наименьшей мощностью.
[8] По выбору, конфигурация контроллера может обеспечивать определение скорости изменения фактической потребляемой мощности, по меньшей мере, в одном из приводного электродвигателя, преобразователя частоты и преобразователя напряжения во время эксплуатации насоса, причем контроллер обеспечивает настройку входного напряжения только в случае, если положительная скорость изменения фактической потребляемой мощности ниже заранее определенного порога, или если параметр, связанный с положительной скоростью изменения фактической потребляемой мощности ниже заранее определенного порога для этого параметра. Например, алгоритм МПМ можно отключать, когда потребляемая мощность растет слишком быстро, и включать, когда потребляемая мощность стабильна в пределах упомянутого определенного порога.
[9] По выбору, конфигурация контроллера может обеспечивать увеличение входного напряжения заранее определенным образом, если положительная скорость изменения фактической потребляемой мощности выше упомянутого порога. Например, входное напряжение можно увеличивать с постоянным темпом или шагами при условии, что положительная скорость изменения фактической потребляемой мощности выше определенного порога. Если потребляемая мощность растет слишком быстро, можно приложить входное напряжение, достигающее максимального индекса модуляции. Индекс M модуляции следует определить здесь как отношение между эффективным выходным напряжением Uвых переменного тока, т.е., выходным фазным напряжением относительно нейтрального потенциала преобразователя частоты, и максимальным выходным напряжением Uвых, макс переменного тока, которое ограничено входным напряжением Uвх постоянного тока преобразователя частоты, т.е.
 .
.
[10] По выбору, конфигурация контроллера может обеспечивать определение фактической потребляемой электрической мощности в пределах заранее определенных интервалов времени или, по существу, непрерывно для соответственной настройки входного напряжения.
[11] По выбору, конфигурация контроллера может обеспечивать определение разности ΔP потребляемых мощностей между потребляемой мощностью, когда подается входное напряжение, и потребляемой мощностью, когда ранее подавалось другое входное напряжение, причем настройка входного напряжения предусматривает изменение входного напряжения на величину разности ΔU напряжений, при этом знак и/или величина разности ΔU напряжений зависит от определяемой разности ΔP потребляемых мощностей.
[12] По выбору, приводной электродвигатель может быть эксплуатируемым в режиме ослабления поля и режиме без ослабления поля, причем конфигурация контроллера обеспечивает настройку входного напряжения в пределах диапазона напряжения между минимальным входным напряжением Uмин и опорным напряжением Uопор в режиме ослабления поля, и при этом конфигурация контроллера обеспечивает настройку входного напряжения в пределах диапазона напряжения между опорным напряжением Uопор и максимальным входным напряжением Uмакс в режиме без ослабления поля, причем Uмин < Uопор < Uмакс. Опорное напряжение Uопор можно определить здесь как входное напряжение Uвх в режиме без ослабления поля, при котором индекс М модуляции является максимальным, т.е.  . Действующее значение выходного напряжения Uвых переменного тока преобразователя частоты, подаваемое в электродвигатель, ограничено входным напряжением Uвх, подаваемым с преобразователя напряжения в преобразователь частоты и приводящим к максимальному действительному значению выходного напряжения
. Действующее значение выходного напряжения Uвых переменного тока преобразователя частоты, подаваемое в электродвигатель, ограничено входным напряжением Uвх, подаваемым с преобразователя напряжения в преобразователь частоты и приводящим к максимальному действительному значению выходного напряжения  переменного тока.
переменного тока.
[13] Здесь термин «режим ослабления поля» будет означать, что ток статора частично снижает суммарный магнитный поток, потому что он сдвинут по фазе относительно магнитного потока ротора более чем на 90°. Термин «режим без ослабления поля» будет означать, что ток статора имеет сдвиг по фазе, составляющий 90° или менее относительно магнитного потока ротора, так что составляющая тока статора не снижает суммарный магнитный поток.
[14] По выбору, преобразователь частоты и преобразователь напряжения находятся на отдельных схемных платах, предпочтительно - разделенных стенкой корпуса.
[15] По выбору, насосный блок содержит циркуляционный насос с мокрым ротором для системы обогрева или охлаждения.
[16] В соответствие со вторым аспектом данного изобретения, предложен способ управления приводным электродвигателем, предназначенным для привода насосного блока, причем блок управления приводного электродвигателя содержит преобразователь частоты и преобразователь напряжения. Способ включает в себя следующие этапы, на которых:
- подают входное напряжение в преобразователь частоты посредством преобразователя напряжения, при этом входное напряжение является регулируемым в пределах диапазона напряжения между Uмин и Uмакс;
- определяют фактическую потребляемую мощность, по меньшей мере, одного из приводного электродвигателя, преобразователя частоты и преобразователя напряжения во время эксплуатации насосного блока; и
- настраивают входное напряжение в зависимости от определяемой фактической потребляемой мощности во время эксплуатации насосного блока.
[17] По выбору, этап настройки входного напряжения предусматривает настройку входного напряжения таким образом, что фактическая потребляемая мощность минимизируется.
[18] По выбору, способ может предусматривать дополнительный этап, на котором определяют скорость изменения фактической потребляемой мощности, по меньшей мере, в одном из приводного электродвигателя, преобразователя частоты и преобразователя напряжения во время эксплуатации насоса, и при этом настройка входного напряжения предусматривает соблюдение условия, согласно которому положительная скорость изменения фактической потребляемой мощности ниже некоторого определенного порога. По выбору, этап настройки входного напряжения предусматривает увеличение входного напряжения заранее определенным образом, если упомянутое условие не соблюдается.
[19] По выбору, этап определения фактической потребляемой электрической мощности предусматривает определение фактической потребляемой электрической мощности в пределах заранее определенных интервалов времени или, по существу, непрерывно для соответственной настройки входного напряжения.
[20] По выбору, этап настройки входного напряжения предусматривает настройку входного напряжения в пределах диапазона напряжения между минимальным входным напряжением Uмин и опорным напряжением Uопор, когда приводной электродвигатель эксплуатируют в режиме ослабления поля, и при этом настройка входного напряжения предусматривает настройку входного напряжения в пределах диапазона напряжения между опорным напряжением Uопор и максимальным входным напряжением Uмакс, когда приводной электродвигатель эксплуатируют в режиме без ослабления поля, причем Uмин < Uопор < Uмакс.
[21] По выбору, способ может включать в себя этап, на котором подают опорное напряжение Uопор в обратном направлении - из преобразователя частоты в преобразователь напряжения. В случае высоких флуктуаций потребляемой мощности, преобразователь напряжения может затем настраивать входное напряжение на опорное напряжение в режиме без ослабления поля.
[22] По выбору, способ может включать в себя этап, на котором передают сигнал определяемой фактической суммарной потребляемой мощности в преобразователь частоты. Фактической суммарной потребляемой мощностью может быть фактическая потребляемая мощность объединенной системы преобразователя частоты, электродвигателя и преобразователя напряжения.
[23] По выбору, этап определения фактической суммарной потребляемой мощности предусматривает определение приблизительной потребляемой мощности в преобразователе напряжения на основе справочной таблицы и/или определяемой фактической потребляемой мощности в преобразователе частоты и/или входного напряжения.
[24] По выбору, способ может включать в себя этап, на котором определяют разность ΔP потребляемых мощностей между потребляемой мощностью, когда подается входное напряжение, и потребляемой мощностью, когда другое входное напряжение подавалось ранее, причем настройка входного напряжения предусматривает изменение входного напряжения на величину разности ΔU напряжений, при этом знак и/или величина разности ΔU напряжений зависит от определяемой разности ΔP потребляемых мощностей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[25] Теперь варианты осуществления данного изобретения будут описаны в качестве примера со ссылками на нижеследующие прилагаемые чертежи, при этом:
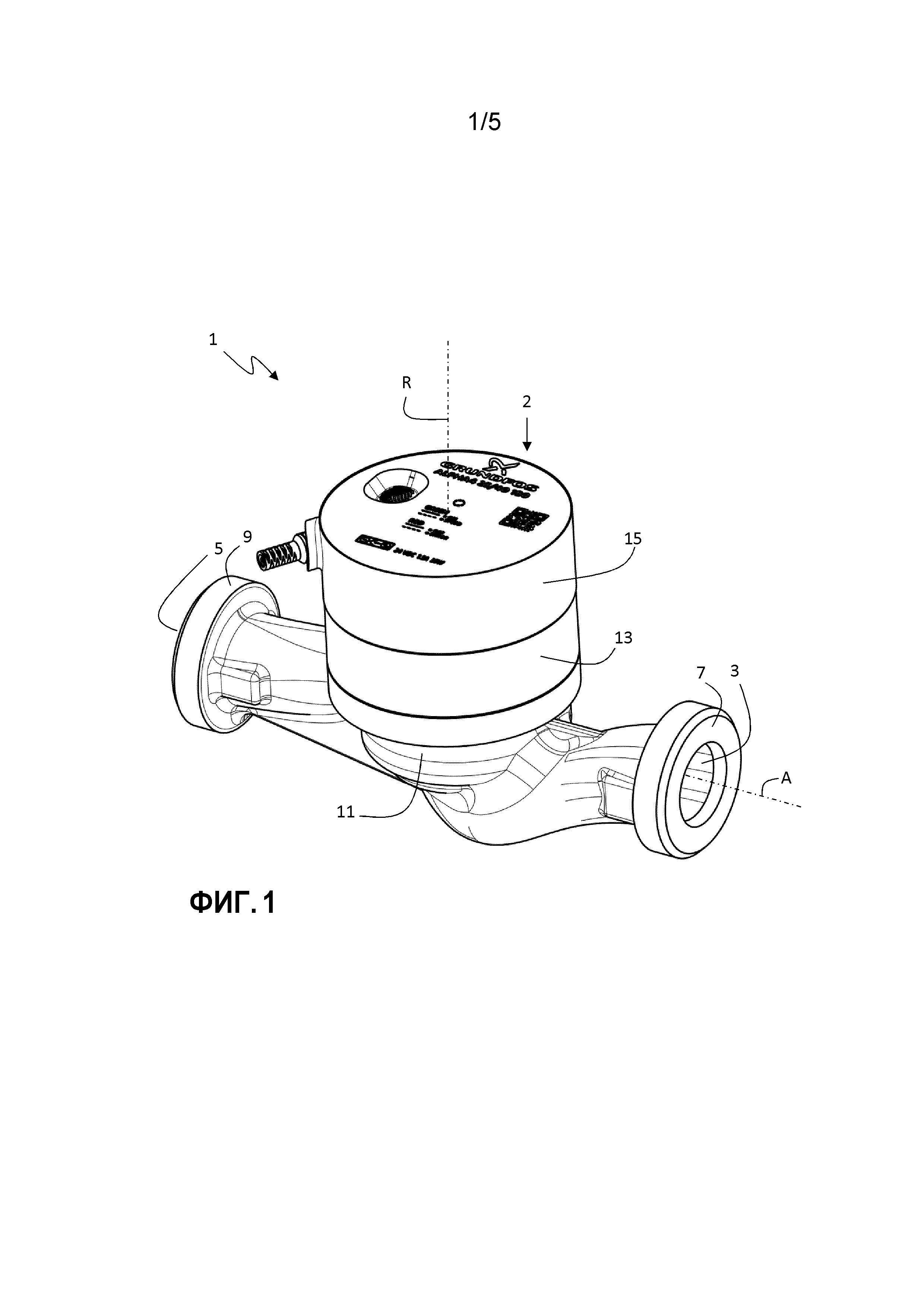
на фиг.1 показано перспективное изображение на примере возможного насосного узла, соответствующего этому изобретению;
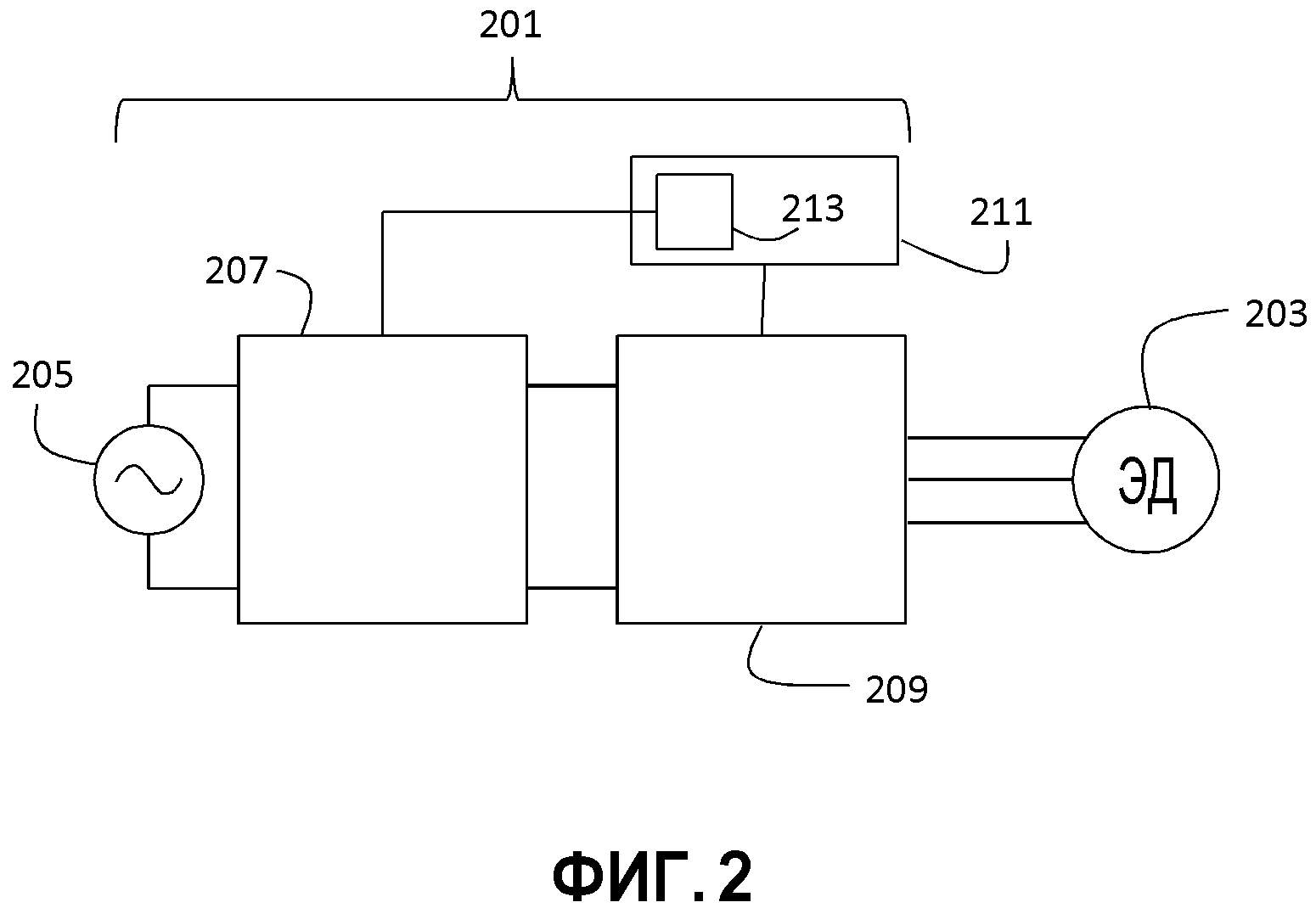
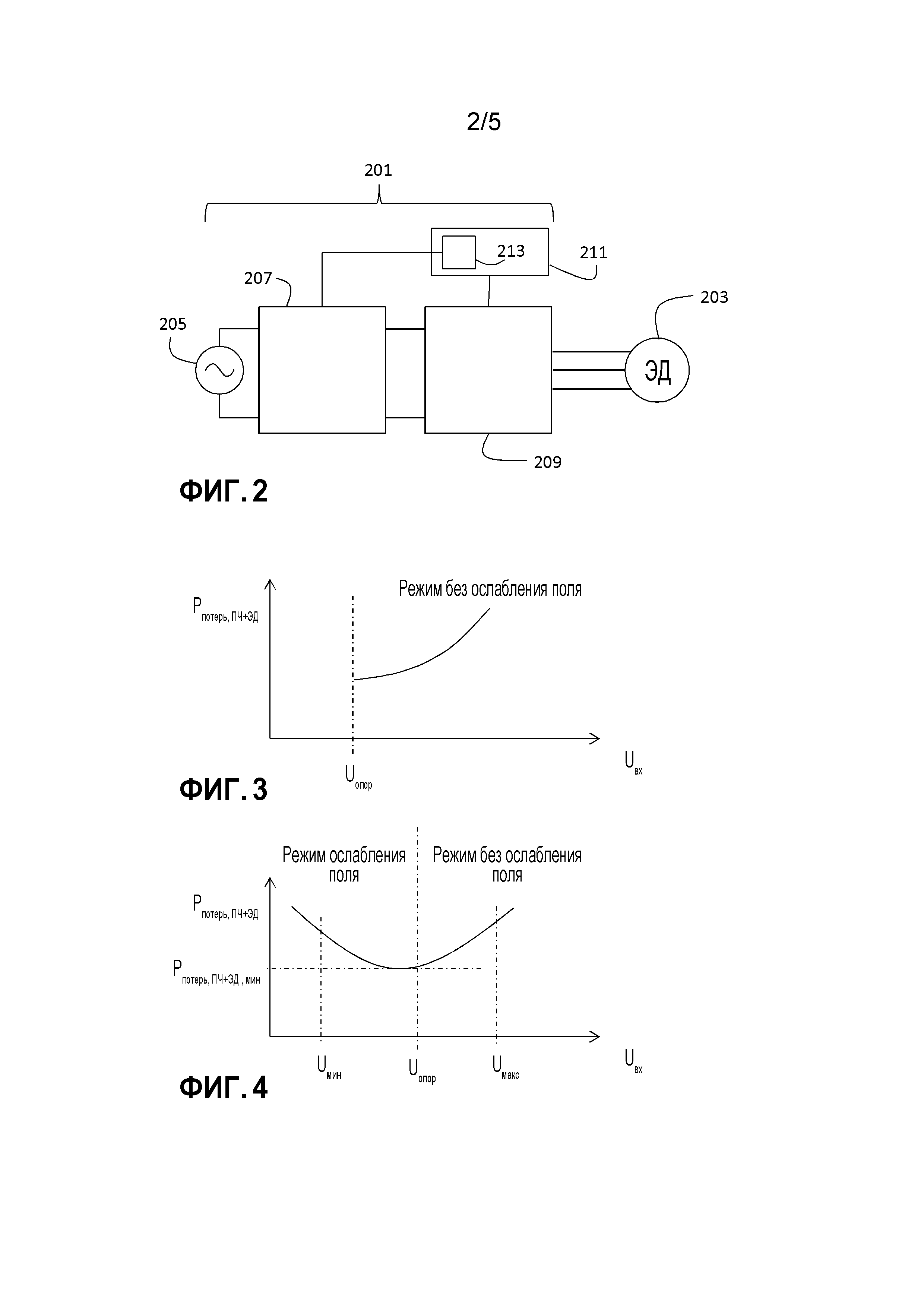
на фиг.2 показано схематическое изображение на основе схемы управления согласно первому примеру насосного узла, соответствующего этому изобретению;
на фиг.3 показаны потери мощности в объединенной системе преобразователя частоты и электродвигателя, эксплуатируемой в режиме без ослабления поля, в зависимости от входного напряжения, подаваемого в преобразователь частоты согласно примеру насосного узла, соответствующего этому изобретению;
на фиг.4 показаны потери мощности в объединенной системе преобразователя частоты и электродвигателя, эксплуатируемой избирательно - либо в режиме ослабления поля, либо в режиме без ослабления поля, - в зависимости от входного напряжения, подавляемого в преобразователь частоты согласно примеру насосного узла, соответствующего этому изобретению;
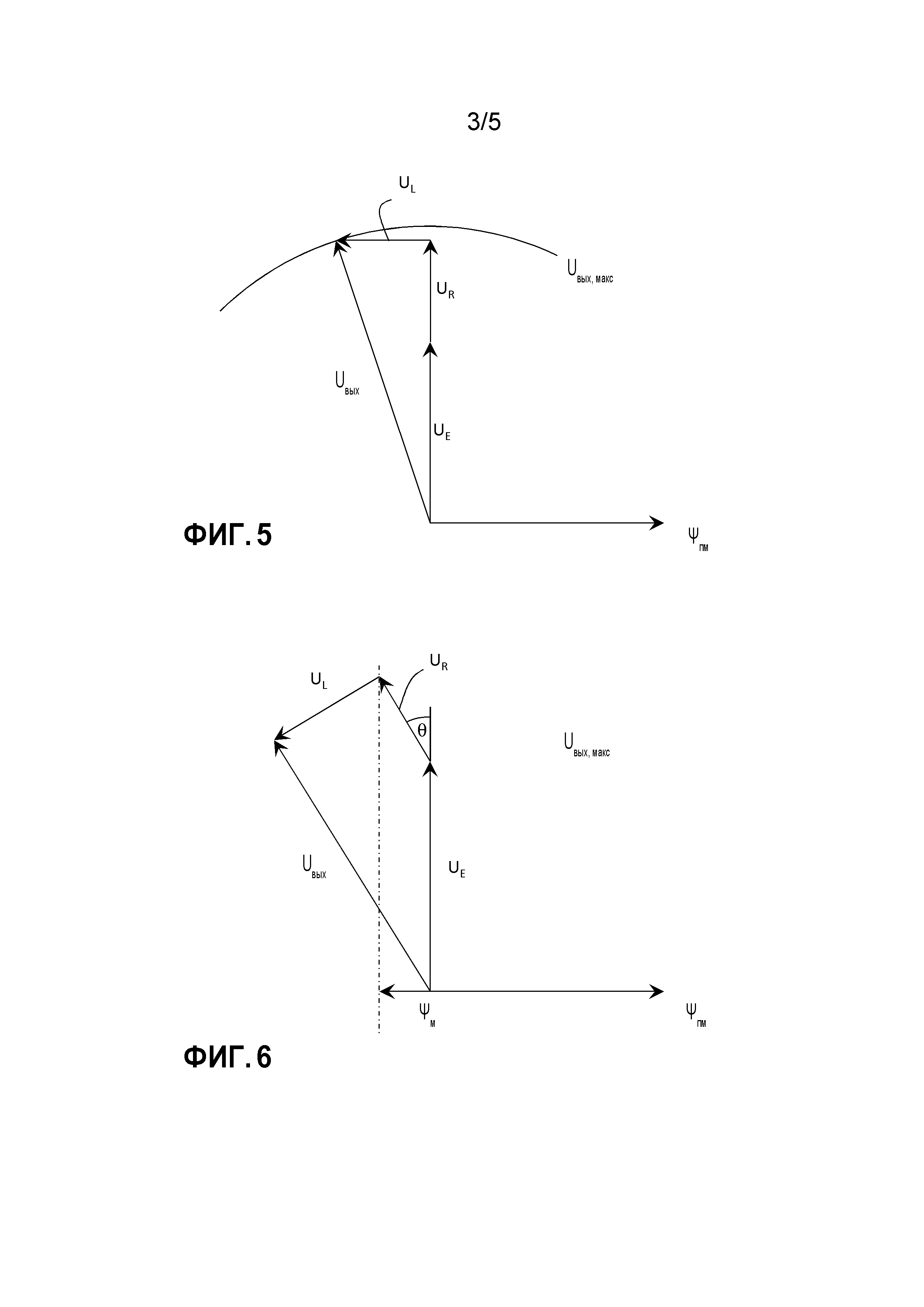
на фиг.5 показана векторная диаграмма для эксплуатации согласно примеру насосного узла, описываемого здесь, в режиме без ослабления поля;
на фиг.6 показана векторная диаграмма для эксплуатации согласно примеру насосного узла, описываемого здесь, в режиме ослабления поля;
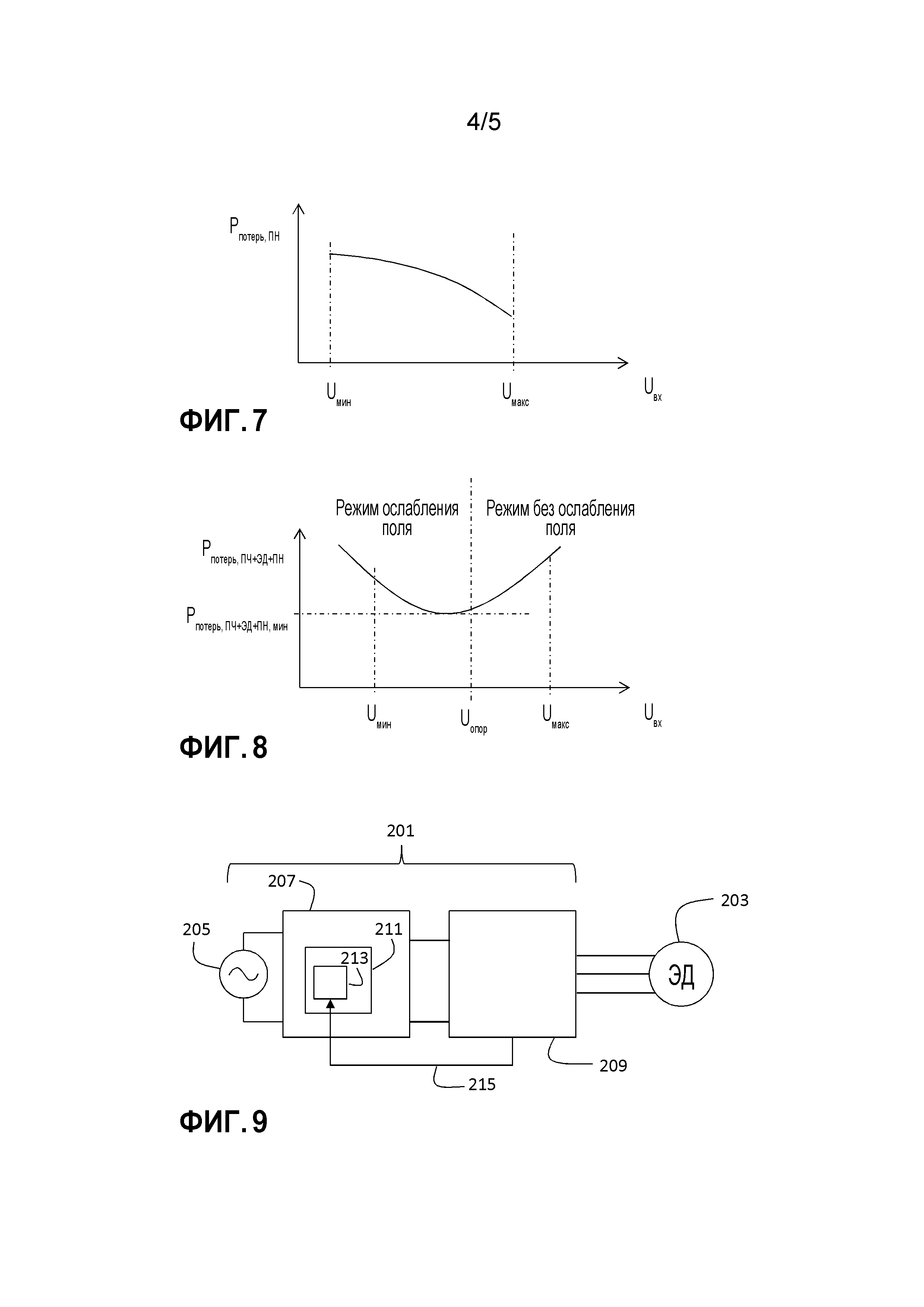
на фиг.7 показаны потери мощности в преобразователе напряжения в зависимости от входного напряжения, подаваемого в преобразователь частоты согласно примеру насосного узла, соответствующего этому изобретению;
на фиг.8 показаны потери мощности в объединенной системе преобразователя частоты, электродвигателя и преобразователь напряжения в зависимости от входного напряжения, подаваемого в преобразователь частоты, согласно примеру насосного узла, соответствующего этому изобретению;
на фиг.9 показано схематическое изображение на основе схемы управления согласно второму примеру насосного узла, соответствующего этому изобретению; и
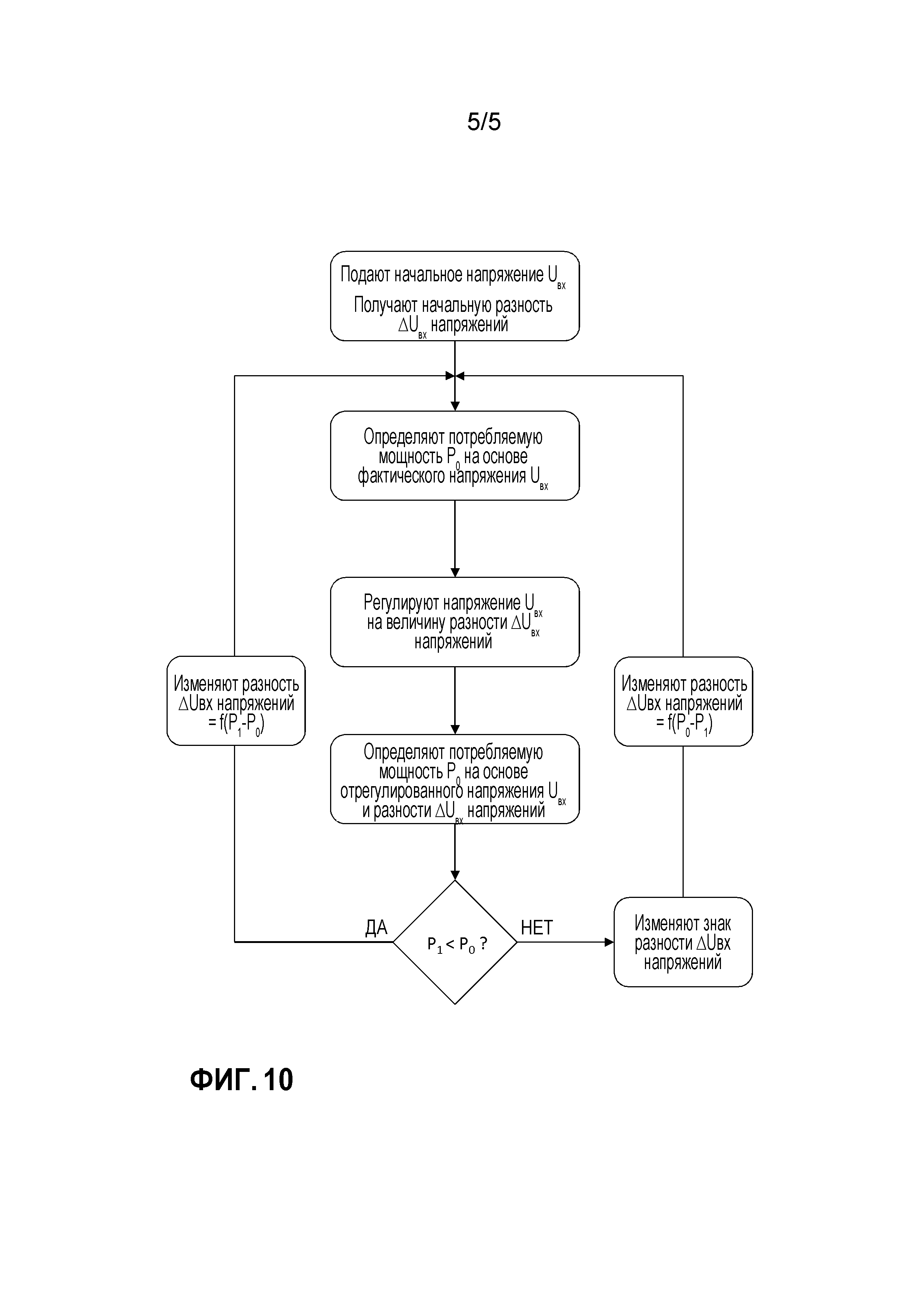
на фиг.10 показано схематическое изображение на основе алгоритма минимальных потерь мощности (МПМ) согласно примеру насосного узла, соответствующего этому изобретению.
ПОДРОБНОЕ ОПИСАНИЕ
[26] На фиг.1 показан насосный узел 1 с блоком 2 центробежного насоса, впускное отверстие 3 и выпускное отверстие 5, причем впускное отверстие 3 и выпускное отверстие 5 расположены соосно вдоль оси А труб на обеих сторонах насосного блока 2. Впускное отверстие 3 и выпускное отверстие 5 содержат соединительные фланцы 7, 9 для соединения с трубами (не показаны). Насосный блок 2 содержит ось R ротора, по существу, перпендикулярную оси А труб. Корпус 11 насоса насосного блока 2 расположен, по существу, между впускным отверстием 3 и выпускным отверстием 5. Корпус 11 насоса содержит крыльчатку (не показана) для вращения вокруг ось R ротора и перекачивания текучей среды от впускного отверстия 3 к выпускному отверстию 5. Привод крыльчатки осуществляет электродвигатель (не показан), находящийся в корпусе 13 электродвигателя, простирающемся от корпуса 11 насоса вдоль оси R ротора до корпуса 15 электронных средств. Корпус 15 электронных средств содержит блок 201 управления (см. фиг.2), предназначенный для управления трехфазным синхронным приводным электродвигателем 203 с постоянными магнитами.
[27] Схема управления, показанная на фиг.2, содержит блок 201 управления, предназначенный для управления трехфазным синхронным приводным электродвигателем 203 с постоянными магнитами. Блок 201 управления получает питающее напряжение 205 переменного тока. Это питающее напряжение 205 переменного тока может быть сетевым напряжением 230 В/110 В или оно может быть низким питающим напряжением переменного тока, например, 60 В, которое обеспечивается внутренним или внешним блоком питания (не показан). Блок 201 управления содержит преобразователь 207 напряжения и преобразователь 209 частоты, причем преобразователь 207 напряжения получает питающее напряжение 203 переменного тока и подает входное напряжение Uвх постоянного тока в преобразователь 209 частоты. Преобразователь 209 частоты подает в каждую из трех фаз приводного электродвигателя 203 выходное напряжение Uвых переменного тока, подвергнутое широтно-импульсной модуляции, для возбуждения электродвигателя 203. Три фазы сдвинуты на 120° друг относительно друга.
[28] Блок 201 управления дополнительно содержит контроллер 211, управляющий переключениями внутри преобразователя 209 частоты. Контроллер 211 может быть частью преобразователя 209 частоты или представлять собой внешнюю схему. Контроллер 211 содержит модуль 213 с минимальными потерями мощности, воплощающий алгоритм минимальных потерь мощности (МПМ). Конфигурация контроллера 201 обеспечивает определение фактической потребляемой мощности, по меньшей мере, одного из приводного электродвигателя 203, преобразователя 209 частоты и преобразователя 207 напряжения, предпочтительно - фактической суммарной потребляемой мощности объединенной системы электродвигателя 203, преобразователя 209 частоты и преобразователя 207 напряжения во время эксплуатации насосного блока 2. Входное напряжение Uвх, подаваемое преобразователем 207 напряжения, регулируют в пределах диапазона напряжения между Uмин и Uмакс, причем конфигурация контроллера 211 обеспечивает настройку входного напряжения Uвх в зависимости от определяемой фактической потребляемой мощности во время эксплуатации насосного блока 2.
[29] Как показано на фиг.3, потери мощности в объединенной системе преобразователя 209 частоты и электродвигателя 203 в режиме без ослабления поля растут от опорного напряжения Uопор с ростом входного напряжения Uвх. Опорное напряжение Uопор может быть входным напряжением Uвх в режиме без ослабления поля, для которого индекс  модуляции является максимальным, т.е.
модуляции является максимальным, т.е.  . Таким образом, чтобы снизить входное напряжение Uвх, делая его меньше опорного напряжения Uопор, электродвигатель 203 можно эксплуатировать в режиме ослабления поля. Когда эксплуатацию осуществляют избирательно в режиме ослабления поля или режиме без ослабления поля, комбинированная система преобразователя 209 частоты и электродвигателя 203 демонстрирует минимальные потери мощности, Pпотерь, ПЧ+ЭД, мин (см. фиг.4) при входном напряжении Uвх, которое может отличаться от опорного напряжения Uопор, так что выгодной может оказаться эксплуатация в режиме ослабления поля. Преобразователь 207 напряжения, в принципе, эффективнее, когда подаются более высокие входные напряжения Uвх (см. фиг.7), но объединенная система преобразователя 209 частоты, электродвигателя 203 и преобразователя 207 напряжения демонстрирует итоговые минимальные потери мощности, Pпотерь, ПЧ+ЭД+ПМ, мин (см. фиг.4), при входном напряжении Uвх, которое может отличаться от опорного напряжения Опор. Для определенных случаев нагрузки, такое входное напряжение Uвх, приводящее к минимальным потерям мощности, Pпотерь, ПЧ+ЭД, мин, может быть, в частности, меньшим, чем опорное напряжение Uопор, так что эксплуатация в режиме ослабления поля может оказаться выгодной. Преобразователь 207 напряжения, в принципе, эффективнее, когда подаются более высокие входные напряжения Uвх (см. фиг.7), но объединенная система преобразователя 209 частоты, электродвигателя 203 и преобразователя 207 напряжения демонстрирует итоговые минимальные потери мощности, Pпотерь, ПЧ+ЭД+ПМ, мин (см. фиг.8), при входном напряжении Uвх, которое может отличаться от опорного напряжения Опор. Таким образом, даже с учетом потерь мощности преобразователя напряжения, для определенных случаев нагрузки, такое входное напряжение Uвх, приводящее к минимальным потерям мощности, Pпотерь, ПЧ+ЭД, мин, может быть, в частности, меньшим, чем опорное напряжение Uопор, так что выгодной может оказаться эксплуатация в режиме ослабления поля. Конфигурация контроллера 211 может обеспечивать настройку входного напряжения Uвх таким образом, что потери мощности объединенной системы преобразователя 209 частоты, электродвигателя 203 и преобразователя 207 напряжения окажутся на уровне своего минимума - Pпотерь, ПЧ+ЭД, мин, как показано на фиг.8.
. Таким образом, чтобы снизить входное напряжение Uвх, делая его меньше опорного напряжения Uопор, электродвигатель 203 можно эксплуатировать в режиме ослабления поля. Когда эксплуатацию осуществляют избирательно в режиме ослабления поля или режиме без ослабления поля, комбинированная система преобразователя 209 частоты и электродвигателя 203 демонстрирует минимальные потери мощности, Pпотерь, ПЧ+ЭД, мин (см. фиг.4) при входном напряжении Uвх, которое может отличаться от опорного напряжения Uопор, так что выгодной может оказаться эксплуатация в режиме ослабления поля. Преобразователь 207 напряжения, в принципе, эффективнее, когда подаются более высокие входные напряжения Uвх (см. фиг.7), но объединенная система преобразователя 209 частоты, электродвигателя 203 и преобразователя 207 напряжения демонстрирует итоговые минимальные потери мощности, Pпотерь, ПЧ+ЭД+ПМ, мин (см. фиг.4), при входном напряжении Uвх, которое может отличаться от опорного напряжения Опор. Для определенных случаев нагрузки, такое входное напряжение Uвх, приводящее к минимальным потерям мощности, Pпотерь, ПЧ+ЭД, мин, может быть, в частности, меньшим, чем опорное напряжение Uопор, так что эксплуатация в режиме ослабления поля может оказаться выгодной. Преобразователь 207 напряжения, в принципе, эффективнее, когда подаются более высокие входные напряжения Uвх (см. фиг.7), но объединенная система преобразователя 209 частоты, электродвигателя 203 и преобразователя 207 напряжения демонстрирует итоговые минимальные потери мощности, Pпотерь, ПЧ+ЭД+ПМ, мин (см. фиг.8), при входном напряжении Uвх, которое может отличаться от опорного напряжения Опор. Таким образом, даже с учетом потерь мощности преобразователя напряжения, для определенных случаев нагрузки, такое входное напряжение Uвх, приводящее к минимальным потерям мощности, Pпотерь, ПЧ+ЭД, мин, может быть, в частности, меньшим, чем опорное напряжение Uопор, так что выгодной может оказаться эксплуатация в режиме ослабления поля. Конфигурация контроллера 211 может обеспечивать настройку входного напряжения Uвх таким образом, что потери мощности объединенной системы преобразователя 209 частоты, электродвигателя 203 и преобразователя 207 напряжения окажутся на уровне своего минимума - Pпотерь, ПЧ+ЭД, мин, как показано на фиг.8.
[30] Векторная диаграмма во вращающейся системе координат согласно фиг.5 иллюстрирует соотношение фаз между основными составляющими в режиме без ослабления поля. Магнитный поток Ψпм постоянного магнита сдвинут по фазе на 90° относительно фазного тока I в статоре электродвигателя 203. Выходное напряжение Uвых преобразователя 209 частоты, подаваемое в статор электродвигателя 203, является результатом падения напряжения на активном сопротивлении, UR = R⋅I, противоэдс UE и индуктивного падения напряжения, UL=ω⋅L⋅I, где индуктивность L включает в себя и собственную индуктивность, и индуктивность фазовой связи. Падение UR напряжения на активном сопротивлении и противоэдс UE находятся в фазе, а индуктивное падение UL напряжения сдвинуто по фазе на 90° относительно падения UR напряжения на активном сопротивления. В примере, показанном на фиг.5, индекс М модуляции максимален, так что выходное напряжение Uвых, по существу, равно максимальному выходному напряжению Uвых, макс, иллюстрируемому посредством кривой. В режиме без ослабления поля, приводной электродвигатель 203 описываемого здесь насосного блока 2 можно эксплуатировать при максимальном индексе модуляции, Mмакс, при этом преобразователь 207 напряжения подает входное напряжение Uвх, равное опорному напряжению Uопор, подаваемому в преобразователь 209 частоты, т.е. Uвх=Uопор.
[31] Чтобы дополнительно снизить суммарную потребляемую мощность, можно уменьшить входное напряжение Uвх, делая его ниже опорного напряжение Uопор, что возможно в режиме ослабления поля, как показано на фиг.6. Преобразователь 209 частоты может сдвигать фазный ток I на угол θ, вследствие чего обмотки статора индуцируют магнитный поток Ψм = I⋅L⋅sinθ, ослабляя результирующий магнитный поток в электродвигателе, Ψ=Ψпм+Ψм. Сниженный магнитный поток Ψ в электродвигателе должен приводить к меньшему крутящему моменту и меньшей гидравлической выходной мощности насоса, что можно компенсировать при частичной нагрузке посредством большего фазного тока I, по-прежнему потребляя при этом меньшую - в общей сложности - мощность. Если электродвигатель 203 эксплуатируют при полной нагрузке, когда дальнейшее увеличение фазного тока невозможно, режим ослабления поля может стать менее эффективным, но при этом возникать он может редко. Большинство времени электродвигатель 203 можно эксплуатировать при частичной нагрузке, когда наиболее эффективной может оказаться избирательная эксплуатация в режиме ослабления поля или режиме без ослабления поля в условиях подходящей настройки входного напряжения Uвх. Здесь термин «полная нагрузка» означает, что преобразователь частоты питается максимальной входной мощностью, а термин «частичная нагрузка» означает, что преобразователь частоты питается мощностью, меньшей, чем максимальная входная мощность.
[32] Таким образом, термин «режим ослабления поля» означает, что фазный ток частично снижает суммарный магнитный поток, так как он сдвинут по фазе относительно магнитного потока ротора более чем на 90°. В режиме без ослабления поля, фазный ток имеет сдвиг по фазе на 90° или менее относительно магнитного потока ротора, так что отсутствует составляющая фазного тока, который снижает суммарный магнитный поток. Чтобы измерить такой фазовый сдвиг, можно использовать датчик положения. В качестве альтернативы или дополнения к использованию датчика положения, измеряющему угол θ сдвига, можно измерять выходное напряжение Uвых, чтобы определить работает ли электродвигатель в режиме ослабления поля или режиме без ослабления поля. Имея определенный магнитный поток Ψ, сопротивление R, индуктивность L, скорость ω электродвигателя и фазный ток I, расчетное выходное напряжение Uвых, расчет можно вычислить следующим образом

в предположении режима без ослабления поля, т.е., в предположении составляющего 90° фазового сдвига между UL и UR. Если измеряемое выходное напряжение Uвых меньше, чем расчетное напряжение Uвых, расчет, электродвигатель работает в режиме ослабления поля. В противном случае, он работает в режиме без ослабления поля.
[33] В варианте осуществления согласно фиг.9, контроллер 211 является частью преобразователя 207 напряжения, воспринимающего алгоритм минимальных потерь мощности (МПМ), в преобразователе 209 частоты и в электродвигателе 203 через контур 215 обратной связи. На фиг.10 также описан алгоритм минимальных потерь мощности (МПМ) модуля 213 с минимальными потерями мощности (МПМ) контроллера 211. На первом этапе, преобразователь 207 напряжения подает некоторое начальное входное напряжение Uвх в преобразователь 209 частоты. Начальное входное напряжение Uвх является регулируемым посредством разности ΔUвх начальных напряжений, так что Uвх является изменяемо регулируемым параметром в пределах диапазона напряжения между Uмин и Uмакс. На втором этапе определяют и сохраняют в памяти фактическую потребляемую мощность P0, по меньшей мере, одного из приводного электродвигателя 203, преобразователя 209 частоты и преобразователя 207 напряжения во время эксплуатации насосного блока 2. Затем изменяют входное напряжение Uвх на величину разности ΔUвх начальных напряжений и определяет фактическую потребляемую мощность P1, по меньшей мере, одного из приводного электродвигателя 203, преобразователя 209 частоты и преобразователя 207 напряжения во время эксплуатации насосного блока 2. Потом сравнивают потребляемые мощности P1 и P0. Если P1 < P0, регулирование, уменьшавшее потребляемую мощность, и вышеупомянутые этапы можно повторить, начиная с получения отрегулированного входного напряжения Uвх, до тех пор, пока не окажется справедливым неравенство P1≥P0. Если P1≥P0, то можно изменить знак ΔUвх, чтобы отрегулировать Uвх в нужном направлении. Вследствие этого, происходит настройка входного напряжения Uвх в зависимости от определяемой фактической потребляемой мощности во время эксплуатации насосного блока 2.
[34] Разность ΔUвх начальных напряжений может и не быть постоянной, а может быть функцией разности ΔP потребляемых мощностей. Таким образом, чем меньше разность потребляемых мощностей, ΔP = |P1 - P0|, тем меньшую разность напряжений, ΔUвх, можно выбрать. Алгоритм МПМ может обуславливать переключение снова на величину разности ΔUвх начальных напряжений сразу же после достижения суммарной минимальной мощности потерь объединенной системы преобразователя 209 частоты, электродвигателя 203 и преобразователя 207 напряжения на уровне Pпотерь, ПЧ+ЭД+ПН, мин.
[35] Конфигурация контроллера 211 может дополнительно обеспечивать определение скорости изменения фактической потребляемой мощности, по меньшей мере, в одном из приводного электродвигателя 203, преобразователя 209 частоты и преобразователя 207 напряжения во время эксплуатации насоса 1, причем конфигурация контроллера 211 обеспечивает настройку входного напряжения Uвх только в случае, если положительная скорость изменения фактической потребляемой мощности ниже некоторого определенного порога, т.е., если преобразователь 209 частоты эксплуатируется при постоянной потребляемой мощности в некоторых пределах. Если фактическая потребляемая мощность слишком быстро вырастает за вышеупомянутые пределы, алгоритм МПМ согласно фиг.10 можно приостановить до тех пор, пока не будет достигнута постоянная потребляемая мощность в упомянутых пределах. Затем контроллер 211 сможет увеличить входное напряжение Uвх заранее определенным образом с постоянной скоростью или шагами по ΔUвх. Контроллер 211 может определять фактическую потребляемую электрическую мощность через заранее определенные интервалы или, по существу, непрерывно, чтобы начать настройку входного напряжения Uвх сразу после того, как потребляемая мощность стабилизируется в упомянутых пределах.
[36] В тех местах вышеизложенного описания, где упоминаются целые числа или элементы, которые имеют известные, очевидные или предвидимые эквиваленты, такие эквиваленты здесь считаются входящими в состав технического решения, как если бы они были перечислены по отдельности. Чтобы определить истинный объем притязаний данного изобретения, следует обратиться к формуле изобретения, которую нужно толковать как охватывающую все такие эквиваленты. Читатель также поймет, что целые числа или признаки согласно описанию, которые приведены как предусматриваемые по выбору, предпочтительные, выгодные, традиционные и т.п., все являются предусматриваемыми по выбору, а не ограничивающими объем притязаний независимой формулы изобретения.
[37] Вышеописанные варианты осуществления следует понимать как иллюстративные примеры изобретения. Должно быть ясно, что любой признак, описанный в связи с любым вариантом осуществления, можно использовать автономно или в комбинации с другими описанными признаками, а также можно использовать в комбинации с одним или несколькими признаками любого другого из вариантов осуществления, или любой комбинации согласно любому другому из вариантов осуществления. Хотя проиллюстрирован и описан, по меньшей мере, один возможный вариант осуществления, следует понять, что специалисту в данной области техники будут очевидны другие модификации, подстановки и альтернативы, так что в объект изобретения, описанный здесь, можно внести соответствующие изменения в рамках объема его притязаний, а эту заявку следует считать охватывающей любые адаптации или изменения рассмотренных здесь конкретных вариантов осуществления.
[38] Кроме того, слово «содержащий (-ая, -ее, -ие)» не исключает другие элементы или этапы, а признак единственного числа не исключает множественное число. Помимо этого, отличительные признаки или этапы, которые описаны со ссылками на один из вышеупомянутых возможных вариантов осуществления, можно также использовать в комбинации с другими отличительными признаками или этапами других возможных вариантов осуществления, описанных выше. Этапы способа применимы в любом порядке или параллельно, или могут составлять часть или более подробную версию другого этапа способа. Следует понять, что в пределах заявляемого патента на предлагаемое изобретение, все такие модификации можно воплотить как уместные и соответственно находящиеся в пределах объема его притязаний, обуславливаемого вкладом уровень техники. Такие модификации, замены и альтернативы можно воплощать в рамках существа и объема притязаний изобретения, который должен определяться исходя из предлагаемой формулы изобретения и ее юридических эквивалентов.
Лопастной насос
Способ регулирования заданного значения температуры теплопередающей среды
Электронная схема и способ работы электронной схемы
Насосная система, а также способ определения расхода в насосной системе
Циркуляционный насосный агрегат для системы нагрева и/или охлаждения
Способ управления мощностью насосного устройства и насосное устройство
Центробежный насос
Гидравлический распределитель для гидравлической системы нагревания и/или охлаждения
Обратный клапан
Сенсорная система
Насосный агрегат
Насосный агрегат
Насосный узел

