Результат интеллектуальной деятельности: МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР, ИМЕЮЩИЙ ДВА ДИАПАЗОНА ИЗМЕРЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к определению физической амплитуды посредством инерциального датчика, а более конкретно посредством маятникового датчика ускорений, напр., датчика, относящегося к микроэлектромеханическим системам (MEMS).
Уровень техники
Электростатический маятниковый акселерометр содержит корпус, который соединен с инерционной массой через один или несколько шарниров, которые расположены таким образом, что инерционная масса образует маятник, который может перемещаться относительно корпуса либо поступательно, либо вращательно. Перемещения инерционной массы под действием ускорения обычно детектируют с помощью трех электродов. Первый неподвижный электрод и второй неподвижный электрод прикреплены к корпусу, и они соединены с цепью возбуждения. Третий электрод подвижен, он находится на маятнике и соединен с цепью детектора.
Каждый неподвижный электрод взаимодействует с подвижным электродом, образуя конденсатор, емкость которого зависит от расстояния между ними. При отсутствии какого-либо производственного дефекта и в случае, если датчик не подвергают ускорению вдоль его оси восприятия, маятник остается в нейтральном положении, в котором две емкости равны. Наоборот, когда маятник подвергают ускорению вдоль его оси восприятия, он перемещается, тем самым уменьшая емкость, образованную между подвижным электродом и одним из неподвижных электродов, и увеличивая при этом емкость, образованную между подвижным электродом и другим неподвижным электродом. Это изменение емкости также зависит от деформации корпуса и маятника.
При работе в замкнутом контуре положением маятника управляют с помощью сервопривода, удерживая его в нейтральном положении или заданном положении на полпути между неподвижными электродами, путем приложения электростатического усилия к маятнику. Поэтому электростатическое усилие должно быть способно компенсировать ускорение, приложенное вдоль оси восприятия, тем самым позволяя оценить это ускорение. Электростатическое усилие является результатом напряжений, поданных на электроды для поддержания нулевой разницы между емкостями.
Цель изобретения
Отношение между характеристикой дрейфа датчика и величиной диапазона измерений определяется точностью, с которой выполнена механическая конструкция и электронная цепь датчика.
Чтобы получить датчик, который обладает небольшим дрейфом при большом диапазоне измерений, в настоящее время необходимо использовать механические и электронные конструкции, которые являются точными и, следовательно, дорогими. Изобретение стремится преодолеть это ограничение.
Сущность изобретения
Для этого предложен датчик ускорений, содержащий конструкцию, к которой прикреплено образующее маятник инерционное тело, на котором расположен подвижный электрод, соединенный с блоком управления, который также соединен с двумя неподвижными электродами, прикрепленными к этой конструкции, чтобы взаимодействовать с подвижным электродом, образуя два конденсатора, емкость которых изменяется как функция расстояния между электродами. Блок управления выполнен с возможностью выполнять операции измерения емкостей и операцию управления, зависящую от измеренных емкостей, при этом к электродам прикладывают напряжение, чтобы удерживать маятник в заданном положении. Эти операции выполняют посредством подачи импульсов. В соответствии с изобретением операция управления содержит:
по выбору:
- стадию точного управления, на которой прикладывают первое напряжение между одним из неподвижных электродов и подвижным электродом, в то время как другой неподвижный электрод находится под таким же потенциалом, как и подвижный электрод; или
- стадия расширенного управления, на которой прикладывают второе напряжение между одним из неподвижных электродов и подвижным электродом, а другой неподвижный электрод находится под таким же потенциалом, как и подвижный электрод, при этом второе напряжение по абсолютному значению больше, чем первое напряжение.
Таким образом:
- получают оптимальную характеристику смещения, отправляя команды средней амплитуды. Это соответствует "точному" режиму работы;
- в "расширенном" режиме работы могут быть отправлены команды большой амплитуды, что позволяет расширить динамический диапазон в ущерб характеристике смещения.
В общем, весь измерительный диапазон датчика нужен редко, в отличие от ситуации, когда носитель датчика подвергают сильному ускорению или замедлению, напр., во время резкого движения носителя в результате толчка или в результате внезапной остановки носителя. В отличие от этого, обычно во время других стадий перемещения носителя весь измерительный диапазон не используется.
Таким образом, изобретение позволяет:
- гарантировать оптимальную характеристику на небольшом диапазоне измерения во время стадии точного управления; и
- выполнять измерения в расширенном диапазоне с характеристикой, которая возможно ниже, во время стадии расширенного управления.
Таким образом, с помощью изобретения рабочая характеристика датчика в среднем остается оптимальной во время работы, так как стадию расширенного управления обычно применяют редко при штатном использовании (т.е. исключая специальные действия, такие как калибровка или тестирование).
В одном варианте осуществления изобретения, во время стадии точного управления на один из упомянутых неподвижных электродов подают опорный потенциал, а на упомянутый подвижный электрод и на упомянутый другой неподвижный электрод подают второй потенциал, а на стадии расширенного управления на упомянутый один из неподвижных электродов подают опорный потенциал, а также опорный потенциал с противоположной полярностью подают на упомянутый подвижный электрод, а также на упомянутый другой неподвижный электрод.
Этот вариант осуществления изобретения позволяет ограничить число применяемых значений напряжения, тем самым, делая конструкцию датчика более простой, а сам датчик более простым в изготовлении.
Таким образом, предпочтительно, чтобы второй потенциал был равен нулю.
В изобретении также предложен способ детектирования ускорения посредством такого датчика.
Другие признаки и преимущества изобретения будут представлены при прочтении последующего описания определенных, неограничивающих вариантов осуществления изобретения.
Краткое описание чертежей
Описание ссылается на сопровождающие чертежи, на которых:
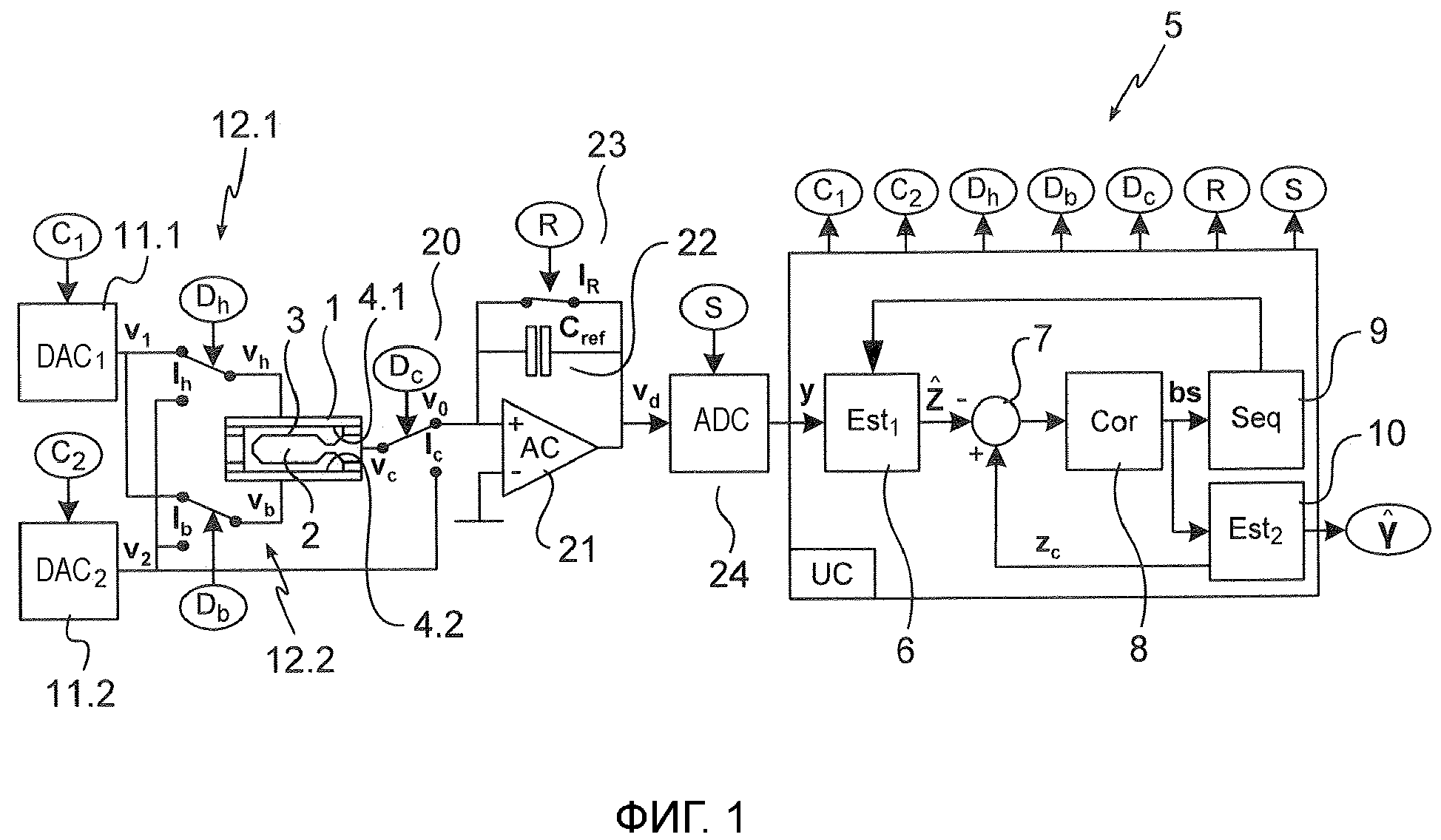
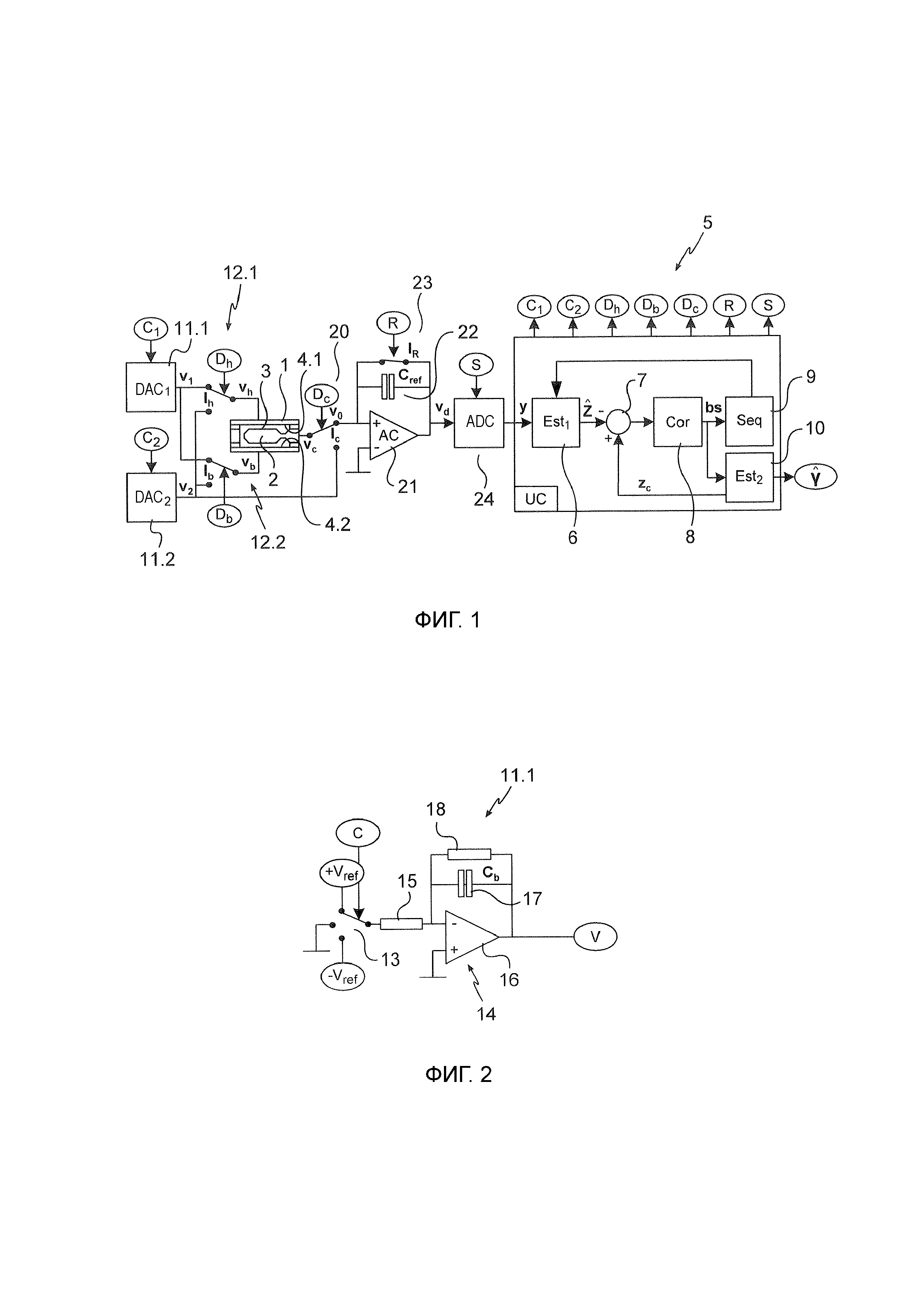
на фиг. 1 показан схематический вид датчика в соответствии с изобретением;
на фиг. 2 показан схематический вид цифро-аналогового преобразователя, используемого в датчике в соответствии с изобретением; и
на фиг. 3 приведена временная диаграмма, показывающая работу датчика в расширенном диапазоне.
Подробное описание изобретения
Со ссылкой на фигуру, датчик ускорений в соответствии с изобретением в этом примере представляет собой микроэлектромеханическую систему (MEMS), выполненную путем травления кристаллической пластины или полукристаллического материала, в частности кремния.
Датчик содержит конструкцию 1, содержащую образующее маятник инерционное тело 2, прикрепленное к ней шарнирно, на котором расположен электрод 3, который может перемещаться относительно конструкции 1.
Два неподвижных электрода 4.1 и 4.2 прикреплены к конструкции 1, чтобы взаимодействовать с подвижным электродом 3, образуя два конденсатора, емкость которых меняется как функция расстояний между электродами 4.1 и 3, а также между электродами 4.2 и 3.
Электроды 3, 4.1 и 4.2 соединены с электронным блоком управления, обозначенным в целом позицией 5.
Блок 5 управления содержит электронную цепь управления известной конструкции, содержащую первый вычислитель 6, соединенный с отрицательным входом вычитателя 7, выход которого соединен с входом корректора 8. Корректор 8 имеет первый выход, соединенный с контроллером 9 последовательности, и второй выход, соединенный со вторым вычислителем 10, первый выход которого образует основной выход блока 5 управления, а второй выход которого соединен с положительным входом вычитателя 7.
Блок 5 управления соединен с цифро-аналоговыми преобразователями, обозначенными ссылочными позициями 11.1, 11.2, которые соответственно соединены с неподвижными электродами 4.1, 4.2 через переключатели 12.1, 12.2.
Каждый цифро-аналоговый преобразователь 11.1, 11.2 имеет переключатель 13, управление которым осуществляют посредством блока 5 управления, и у которого имеется первая входная клемма с опорным потенциалом +Vref; вторая входная клемма с потенциалом, обратным опорному потенциалу, т.е. -Vref; третья входная клемма, соединенная с нулевым потенциалом; и выходная клемма, соединенная с цепью 14 согласования полных сопротивлений. Цепь 14 согласования полных сопротивлений известна сама по себе, и она содержит входной резистор 15, соединенный с отрицательным входом операционного усилителя 16, который зациклен посредством конденсатора 17 обратной связи и резистора 18. Емкость конденсатора 17 обратной связи определяет время нарастания и спада, тем самым позволяя управлять токами заряда и разряда, которые прикладывают к конденсаторам соответственно между электродами 4.1 и 3 и между электродами 4.2 и 3.
Цифро-аналоговый преобразователь 11.1 имеет выход V1, соединенный с первой клеммой переключателя 12.1 и с первой клеммой переключателя 12.2. Цифро-аналоговый преобразователь 11.2 имеет выход V2, соединенный со второй клеммой переключателя 12.1 и со второй клеммой переключателя 12.2. Переключатель 12.1 имеет третью клемму Vh, соединенную с первым неподвижным электродом 4.1, а переключатель 12.2 имеет третью клемму Vb, соединенную со вторым неподвижным электродом 4.2. Переключателями 12.1 и 12.2 управляют так, чтобы соединять их третьи клеммы либо с первыми клеммами, либо со вторыми клеммами.
Подвижный электрод 3 имеет выход Vc, соединенный с первой клеммой переключателя 20, имеющего вторую клемму, соединенную с выходом V2 цифро-аналогового преобразователя 11.2, и третью клемму V0, соединенную с инвертирующим входом усилителя 21 нагрузки с конденсатором 22 обратной связи и переключателем 23 обратной связи. Усилитель 21 нагрузки имеет выход Vd, соединенный с аналогово-цифровым преобразователем 24, соединенным с входом первого вычислителя 6.
Контроллер 9 последовательности выдает следующие команды:
- С1 для управления переключателем 13 цифро-аналогового преобразователя 11.1;
- С2 для управления переключателем 13 цифро-аналогового преобразователя 11.2;
- Dh для управления переключателем 12.1;
- Db для управления переключателем 12.2;
- Dc для управления переключателем 20;
- R для управления переключателем 23; и
- S для управления аналогово-цифровым преобразователем 24.
Блок управления устроен так, чтобы выдавать логические сигналы ED1, ED2, приводящие к измерению емкостей между электродами 3 и 4.1, а также между электродами 3 и 4.2, и логический сигнал EC, заставляющий подавать импульсы как функцию измеренных емкостей, чтобы поддерживать маятник в заданном положении, а именно, в положении посередине между неподвижными электродами 4.1 и 4.2.
Операция управления содержит выборочно стадию точного управления и стадию расширенного управления. На стадии точного управления между одним из неподвижных электродов 4.1, 4.2 и подвижным электродом 3 создают первое напряжение, в то время как на другом неподвижном электроде 4.1, 4.2 остается такой же потенциал, как и на подвижном электроде 3. Во время стадии расширенного управления между одним из неподвижных электродов 4.1, 4.2 и подвижным электродом 3 создают второе напряжение, в то время как на другом неподвижном электроде 4.1, 4.2 остается такой же потенциал, как и на подвижном электроде 3. Второе напряжение имеет большую абсолютную величину, чем первое напряжение.
Более точно, на стадии точного управления на упомянутый один из неподвижных электродов 4.1, 4.2 подают опорный потенциал Vref, а на упомянутый подвижный электрод 3 и на упомянутый другой неподвижный электрод 4.1, 4.2 подают второй потенциал, в данном примере нулевой.
Более точно, на стадии расширенного управления опорный потенциал Vref подают на упомянутый один из неподвижных электродов 4.1, 4.2, а опорный потенциал с обратной полярностью подают на упомянутый подвижный электрод 3 и на упомянутый другой неподвижный электрод 4.1, 4.2.
Логические команды Dc, Dh, Db и EC удовлетворяют следующим булевым соотношениям:
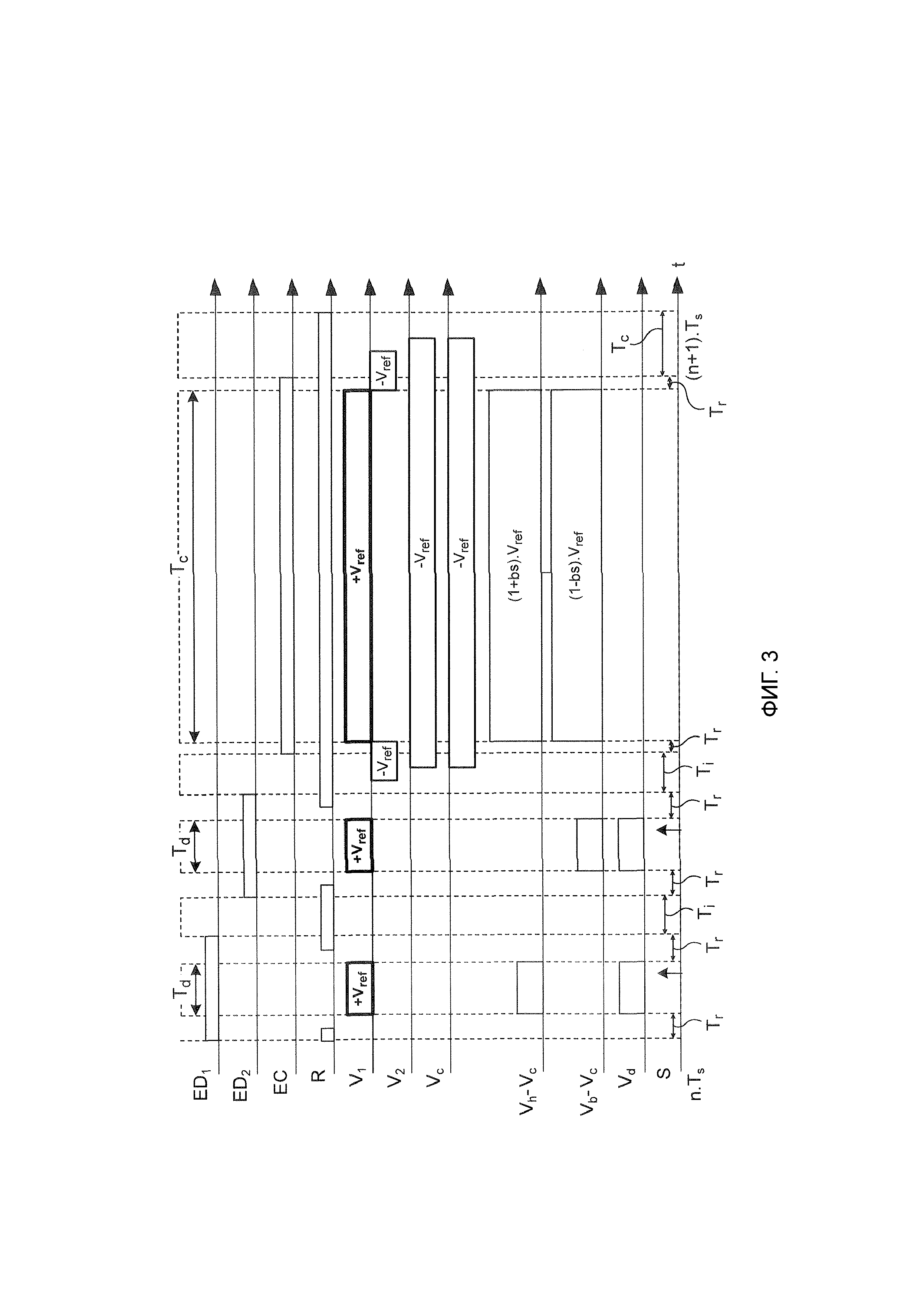
На временной диаграмме на фиг. 3 показаны различные операции, выполняемые в расширенном диапазоне в течение периода Ts дискретизации, который содержит два периода Td детектирования (соответствующие сигналам ED1 и ED2) и один период Tc управления (соответствующий сигналу EC).
Видно, что в расширенном диапазоне выходы V1, V2 и Vc могут принимать потенциал +Vref или -Vref в зависимости от направления усилия, которое должно воздействовать на маятник. Напряжение, прикладываемое к конденсатору Ch (между электродами 4.1 и 3), составляет (1+bs)Vref, а напряжение, прикладываемое к конденсатору Cb (между электродами 4.2 и 3) равно (1bs)Vref, где bs зависит от направления усилия, которое должно воздействовать на маятник.
Наоборот, в точном диапазоне выходы V1, V2 и Vc могут принимать потенциал +Vref или 0 в зависимости от направления усилия, которое должно воздействовать на маятник. В таких условиях напряжение, прикладываемое к конденсатору Ch (между электродами 4.1 и 3), составляет (1+bs)Vref/2, а напряжение, прикладываемое к конденсатору Cb (между электродами 4.2 и 3) равно (1-bs)Vref/2, где bs зависит от направления усилия, которое должно воздействовать на маятник. Эффективность управляющего импульса в точном диапазоне, таким образом, делят на четыре.
Во время операции детектирования, где Q0 - заряд, подаваемый переключателем 23 при размыкании, а VOS - напряжение смещения на выходе из усилителя 21 нагрузки, выходные напряжения из усилителя 21 нагрузки в два момента отсчета, заданы следующим образом:
Разницу между емкостями можно вывести из них следующим образом:
До первого порядка положение z представляет собой аффинную функцию от вышеупомянутой разницы.
Блок 5 управления управляет работой устройства, в частности, моментами времени различных операций с частотой Fs (период Ts=1/Fs, см. фиг. 3). Блок 5 управления управляет цифро-аналоговыми преобразователями 11.1, 11.2 и аналогово-цифровым преобразователем 24, а также аналоговыми переключателями 12.1, 12.2 и 20 последовательно и циклично.
В зависимости от логического состояния команды Dc подвижный электрод 3 соединяют с инвертирующим входом усилителя 21 нагрузки или с выходом V2 цифро-аналогового преобразователя 11.2.
В зависимости от логического состояния команды Dh неподвижный электрод 4.1 соединяют с выходом V1 цифро-аналогового преобразователя 11.1 или с выходом V2 цифро-аналогового преобразователя 11.2.
В зависимости от логического состояния команды Db неподвижный электрод 4.2 соединяют с выходом V1 цифро-аналогового преобразователя 11.1 или с выходом V2 цифро-аналогового преобразователя 11.2.
Напряжения Vh, Vc и Vb, подаваемые на электроды 4.1, 3 и 4.2, упорядочивают так, чтобы измерить Ch, измерить Cb, а затем приложить электростатическое усилие, позволяющее так осуществить сервоуправление маятником, чтобы установить его в заданное положение, задаваемое блоком 5 управления.
На стадии детектирования подвижный электрод 3 подключают к инвертирующему входу усилителя 21 нагрузки с обратной связью через емкость Cref конденсатора 22 посредством переключателя 23 в соответствии с командой, заданной логическим сигналом R от контроллера 9 последовательности. Посредством отрицательной обратной связи этот усилитель 21 нагрузки постоянно поддерживает потенциал V0 в окрестности нуля.
Выходное напряжение Vd усилителя 21 нагрузки преобразуют в цифровую величину y с помощью аналогово-цифрового преобразователя 24 под управлением логического сигнала S.
Вычислитель 6 предоставляет оценку  перемещения маятника, исходя из величины y.
перемещения маятника, исходя из величины y.
Вычислитель 10 предоставляет заданное значение Zc, которое позволяет компенсировать смещение вследствие статической асимметрии емкостей между электродами 4.1 и 3 и между электродами 3 и 4.2.
Разницу Zc посредством сервоуправления сводят к нулю с помощью цифрового корректора 8, который подготавливает команду bs, равную +1 или 1 в зависимости от того, надо ли подтолкнуть или притянуть маятник, чтобы свести вход корректора 8 обратно к нулю.
посредством сервоуправления сводят к нулю с помощью цифрового корректора 8, который подготавливает команду bs, равную +1 или 1 в зависимости от того, надо ли подтолкнуть или притянуть маятник, чтобы свести вход корректора 8 обратно к нулю.
Если bs=+1, то на электрод 4.1 подают напряжение, которое притягивает к нему маятник.
Если bs=1, то на электрод 4.2 подают напряжение, которое притягивает к нему маятник.
Вычислитель 10 подготавливает оценку  ускорения, которое необходимо измерить, а также подготавливает заданную величину Zc.
ускорения, которое необходимо измерить, а также подготавливает заданную величину Zc.
Контроллер 9 последовательности упорядочивает операции в течение периода дискретизации и от одного периода к другому.
Наконец, блок 5 управления автономно выбирает рабочий диапазон, либо расширенный диапазон, либо точный диапазон, как функцию значения , которое сравнивают с пороговым значением.
Разницы значений времени реакции аналоговых переключателей 12.1, 12.2 и 20 представляют собой основной источник асимметрии импульсов. Чтобы исправить это, операции детектирования (измерение емкостей Ch и Cb, обозначенные через Td на фиг. 3) и операции управления (обозначенные через Tc на фиг. 3) разделяют так называемыми стадиями "релаксации" (обозначенными через Tr а фиг. 3), во время которых позиционируют каждый из переключателей 12.1, 12.2 и 20, в то время как три значения напряжения, поданные на их клеммы, равны. Тем не менее, в течение определенных стадий напряжения, подаваемые на три электрода, необходимо одновременно изменять. Для этого их сначала подключают к цифро-аналоговому преобразователю 11.2, прежде чем его выход изменится. Эти три стадии обозначены на временной диаграмме на фиг. 3 через Ti.
Естественно, изобретение не ограничено описанными вариантами осуществления, и оно охватывает любой вариант, попадающий под объем изобретения, заданный формулой изобретения.
В частности, моменты времени выполнения вышеописанных операций могут отличаться от описанных. Например, число операций переключения, выполняемых в точном диапазоне, можно сократить, либо может быть изменена продолжительность, амплитуды и знаки импульсов. Кроме того, стадии детектирования могут быть переставлены из одного периода в другой, чтобы повысить симметричность работы.
Напряжение в расширенном диапазоне, как вариант, может быть целым кратным напряжения в точном диапазоне.
Низкий потенциал в точном диапазоне может отличаться от нуля.
Пороговое значение, с которым сравнивают оценку ускорения, может быть установлено на заводе-изготовителе, либо оно может меняться как функция условий использования датчика или требуемой характеристики датчика.
Способ навигации беспилотного аппарата в присутствии постороннего летательного аппарата и беспилотный аппарат для осуществления способа
Способ обеспечения автоматической посадки летательного аппарата
Двухканальная архитектура с избыточными линиями связи ccdl
Способ контроля электромеханической приводной системы
Вооруженная оптоэлектронная турель
Устройство управления полетом летательного аппарата
Система для дистанционно управляемых систем
Способ проверки неразрывности передачи данных между главным входным блоком и главным выходным блоком
Устройство ручки управления полетом летательного аппарата с возвратным усилием, содержащее резервный канал
Двухканальная архитектура
Инерциальный датчик угловой скорости с компенсацией отклонения
Датчик с электростатическим маятниковым акселерометром и способ управления таким датчиком
Резонатор для встраивания в инерциальный угловой датчик

