Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к виброзащитной технике и может быть использовано для контроля параметров динамического состояния объектов машиностроения.
Динамическое состояние технических объектов, работающих в условиях интенсивного вибрационного нагружения, существенным образом влияет на надежность и безопасность эксплуатации оборудования. Вопросы оценки динамических состояний различных объектов, разработки способ и средства нашли отражение в работах [1-3]. Принял технических средств, использование которых снижает уровень вибрации, передаваемых на объекты вибрационной защиты, достаточно разнообразен и представлен специальными устройствами в виде амортизаторов, демпферов, гасителей и др. [4-6].
Вместе с тем, в меньшей степени изучены возможности технических средств защиты комбинационного типа, в которых положительные эффекты по изменению динамических состояний, достигаются за счет совместных динамических взаимодействий инерционной, диссипативной и упругих свойств выбора защитных систем. При этом особый интерес представляют технические средства, в которых в той или иной форме, реализуются возможности динамического демпфирования или динамического гашения колебаний. Отдельные вопросы таких подходов представлены в работах [7, 8].
Однако, в целом, упомянутая проблема нуждаются в дальнейших разработках, ориентированные на детализацию представлений о возможностях технических средств, применяемых в задачах вибрационной защиты машин, оборудования, приборов и аппаратуры.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известен способ [Говердовский В.Н., Чанг-Мён Ли. «Способ вторичного подрессоривания тележки вагона высокоскоростного рельсового транспорта», патент №2597428 С1, МПК B61F 5/02, приоритет 10.09.2016], согласно которому тележку снабжают виброизолирующей системой, содержащей упругий элемент, направляющий механизм и механизм демпфирования, из структурных элементов которых собирают кинематическую цепь для обеспечения движения системы в заданном направлении, размещают систему в рабочем пространстве тележки и присоединяют ее к раме тележки и кузову вагона, формируют и активируют сигнал управления параметрами упругого элемента, отличающийся тем, что собирают также локальную кинематическую цепь, которую компактно размещают в рабочем пространстве и присоединяют ее к системе параллельно действию кинематической цепи, подвижно связывая входной и выходной структурные элементы локальной кинематической цепи, соответственно, с рамой и кузовом, по меньшей мере, не увеличивая структурной избыточности кинематической цепи, далее собирают дополнительный упругий элемент с регулируемой жесткостью и присоединяют его к раме и входному структурному элементу локальной кинематической цепи без увеличения рабочего пространства в заданном направлении движения системы, затем минимизируют суммарную жесткость обоих упругих элементов в заданном направлении.
Основным недостатком данного изобретения является сложность конструктивного исполнения и отсутствие учета влияния на систему изменения динамических реакций.
Известна полезная модель [Елисеев С.В., Сигачёв Н.П., Фомина И.В., Ермошенко Ю.В., Трофимов А.Н. «Динамический гаситель колебаний», патент №103383 U1, МПК F16F 15/02, приоритет 10.04.2011], представляющая собой динамический гаситель колебаний, содержащий две пружины, разнесенные по сторонам, причем нижними концами опираются на основание, а верхними концами соединены с объектом защиты, отличающийся тем, что в пружины вставлены штоки, опирающиеся нижними концами на колеса, а верхними концами соединены с поршнями, находящимися в цилиндрах, расположенных в полой полости объекта защиты, и имеющими возможность двигаться под действием сжатого воздуха, создаваемого системой сжатого воздуха и тем самым обеспечивая режимы динамического гашения на 3-х частотах.
При возмущении со стороны основания объект защиты приходит в движение действием пружин и штоков. Взаимодействие между парциальными системами возникает из-за того, что в системе существуют инерционные и упругие перекрестные связи. Движение по одной координате обязательно приводит к движению по другой координате. Необходимые изменения динамического состояния достигаются тем, что в виброзащитной системе объекта имеется пневматическая соединительная пружина, которая может регулироваться во время действия внешних нагрузок. Для измерения параметров динамического состояния имеются датчики, которые передают информацию в блок управления. Насос в соответствии с сигналом из блока управления начинает работать и изменяет давление в ресивере. В свою очередь, изменение давления в рабочей полости приводит к изменению параметров, определяющих значения частот для режимов динамического гашения или частоты режимов развязки колебательных систем, при котором движение по одной координате не вызывает движение по другой. Дроссель используется для предварительной настройки быстродействия системы.
К недостаткам данного изобретения можно отнести отсутствие в системе устройств для преобразования движения и недостаточное внимание к учету влияния динамических реакций на состояние системы.
Известно изобретение [Рулев С.В., Сова А.Н., Герасимчук В.В., Герасимчук Н.Н., Рулев А.С., Дербаремдикер А.Д., Ермаков В.Ю., Савостьянов A.M., Элоян С.М. «Управляемая подвеска», патент №2240930 С1, МПК B60G 17/08, F16F 9/53 приоритет 27.11.2004], представляющее собой управляемую подвеску, содержащую гидроцилиндр, рабочий шток с поршнем, систему управления, отличающуюся тем, что введены две секции, каждая секция выполнена в виде последовательно соединенных гидромагистралью баллонов со сжатым газом, состоящих из двух камер, разделенных гибкой непроницаемой перегородкой, одна камера сообщена с гидромагистралью и заполнена магнитной жидкостью, а другая камера заполнена сжатым газом, на входе каждого баллона установлен демпфер на магнитной жидкости, демпферы снабжены электромагнитами и связаны с системой управления, первая секция подключена к поршневой полости гидроцилиндра, вторая - к штоковой полости гидроцилиндра, в статическом положении значения давлений в баллонах со сжатым газом подчиняются зависимости
где  - значение давления газа в 1-м баллоне секции сжатия в статическом положении;
- значение давления газа в 1-м баллоне секции сжатия в статическом положении;
 - значение давления газа в i-м баллоне секции сжатия в статическом положении;
- значение давления газа в i-м баллоне секции сжатия в статическом положении;
 - значение давления газа в j-м баллоне секции отбоя в статическом положении;
- значение давления газа в j-м баллоне секции отбоя в статическом положении;
αi - безразмерный коэффициент, связывающий давления в 1-м баллоне и i-м баллоне секции сжатия, 0<αi<3;
βj - безразмерный коэффициент, связывающий давления в 1-м баллоне секции сжатия и j-м баллоне секции отбоя, 0<βj<3;
i, j=1-10, номера баллонов в секциях сжатия, отбоя соответственно, а в качестве рабочей жидкости используется магнитная жидкость с содержанием магнитных частиц 1…10% по объему.
По сигналу от датчиков информации системы управления в магнитожидкостных демпферах, установленных на гидромагистралях, наводятся электромагнитные поля, которые вызывают изменения эффективной вязкости магнитной жидкости, находящейся в проходном канале каждого магнитожидкостного демпфера, изменение вязкости и перераспределение потока магнитной жидкости между баллонами со сжатым газом осуществляются в соответствии с алгоритмами, позволяющими сформировать рациональные значения упругой и демпфирующей характеристик подвесок транспортного средства и снизить перегрузки объекта амортизации до допустимых величин при движении по дорогам различной категории с переменными скоростями.
Таким образом, благодаря введению двух секций баллонов, разделенных гибкими непроницаемыми перегородками на жидкостные и газовые полости, подключенных жидкостными полостями к штоковой и к поршневой полостям гидроцилиндра с установленными перед баллонами демпферами на магнитной жидкости, управляемыми системой управления, существенно расширяются функциональные возможности предлагаемого устройства, поскольку данная управляемая подвеска позволяет реализовать управление упругой и демпфирующей подвесок составляющими усилия, создаваемого в подвеске, и, таким образом, формировать согласно заданному в системе управления алгоритму рациональные значения упругодемпфирующей характеристики, обеспечивающей надежное снижение перегрузок объекта амортизации транспортного средства при движении по дорогам различных категорий с переменными скоростями движения.
Основным недостатком данного изобретения является невнимание к динамическим реакциям между составляющими элементами системы, а также сложность конструкции.
В качестве прототипа выбирается изобретение [Прокопов Е.Е., Чернышев В.И. «Двухкамерный пневматический амортизатор», патент №2139458 С1, МПК F16F 9/50, приоритет 10.10.1999], представляющее собой двухкамерный пневматический амортизатор, содержащий рабочую камеру, закрепляемую между основаниями, одно из которых предназначено для соединения с защищаемым объектом, а второе - с источником вибрации, дополнительную камеру, цилиндр с двумя торцевыми отверстиями, поршень, свободно перемещающийся в цилиндре между его торцами, три пневмоканала, первый из которых соединяет рабочую камеру с одним из торцевых отверстий цилиндра, а второй - дополнительную камеру с другим торцевым отверстием цилиндра, блок управления, датчик скорости, расположенный на первом основании и подключенный к первому входу блока управления, и электроклапан, встроенный в третий пневмоканал и электрически связанный с выходом блока управления, отличающийся тем, что он снабжен концевым переключателем, электрически подключенным ко второму входу блока управления и состоящим из геркона и постоянного магнита, закрепленных соответственно на торце цилиндра и поршня, а третий пневмоканал соединяет рабочую и дополнительную камеры.
К недостаткам данного изобретения можно отнести отсутствие учета динамических реакций как параметров состояния системы.
Задачей изобретения является управление динамическим состоянием виброзащитной системы за счет регулирования приведенной динамической жесткости.
Способ управления и изменения динамического состояния виброзащитной системы, согласно которому виброзащитная система снабжается дополнительными элементами, обеспечивающими настройку и контроль ее динамического состояния с помощью датчиков и блока обработки информации и управления этими процессами, отличающийся тем, что формирование требуемых динамических реакций осуществляется путем изменения приведенной жесткости обобщенной пружины, причем в конструкцию дополнительно вводится винтовой несамотормозящийся механизм.
Устройство управления и изменения динамического состояния виброзащитной системы, состоящее из упругих и инерционных элементов, отличающееся тем, что управление динамическим состоянием виброзащитной системы осуществляется при помощи изменения приведенной жесткости обобщенной пружины, состоящей из соединенных винтового несамотормозящегося механизма и параллельно введенной обычной пружины и последовательно соединенного с ними пневматического баллона, жесткость которого регулируется компрессором и управляемым дросселем для сброса избыточного давления.
Предлагается способ управления и изменения динамического состояния вибрационной системы, в которой объект защиты опирается на специальной структурный блок, состоящий из нескольких упругих элементов и устройства для преобразования движения. Достижения необходимых параметров динамического состояния объекта защиты достигается за счет динамических эффектов, создаваемых в последовательной связке двух элементов, представленных устройством для преобразования движения, формирующего изменения в приведенной массы и упругого элемента в виде пневмобаллона с регулируемым давлением (или жесткостью). Управление системой осуществляется управляющим блоком, который позволяет обработку данных о состоянии, поступающих с датчиком и получение необходимых данных после реализации алгоритма, подбора закона изменения жесткости пневмобаллона. Достижения необходимых параметров создается совместным действием устройства для преобразования движения и пневмобаллона с управляемой жидкостью.
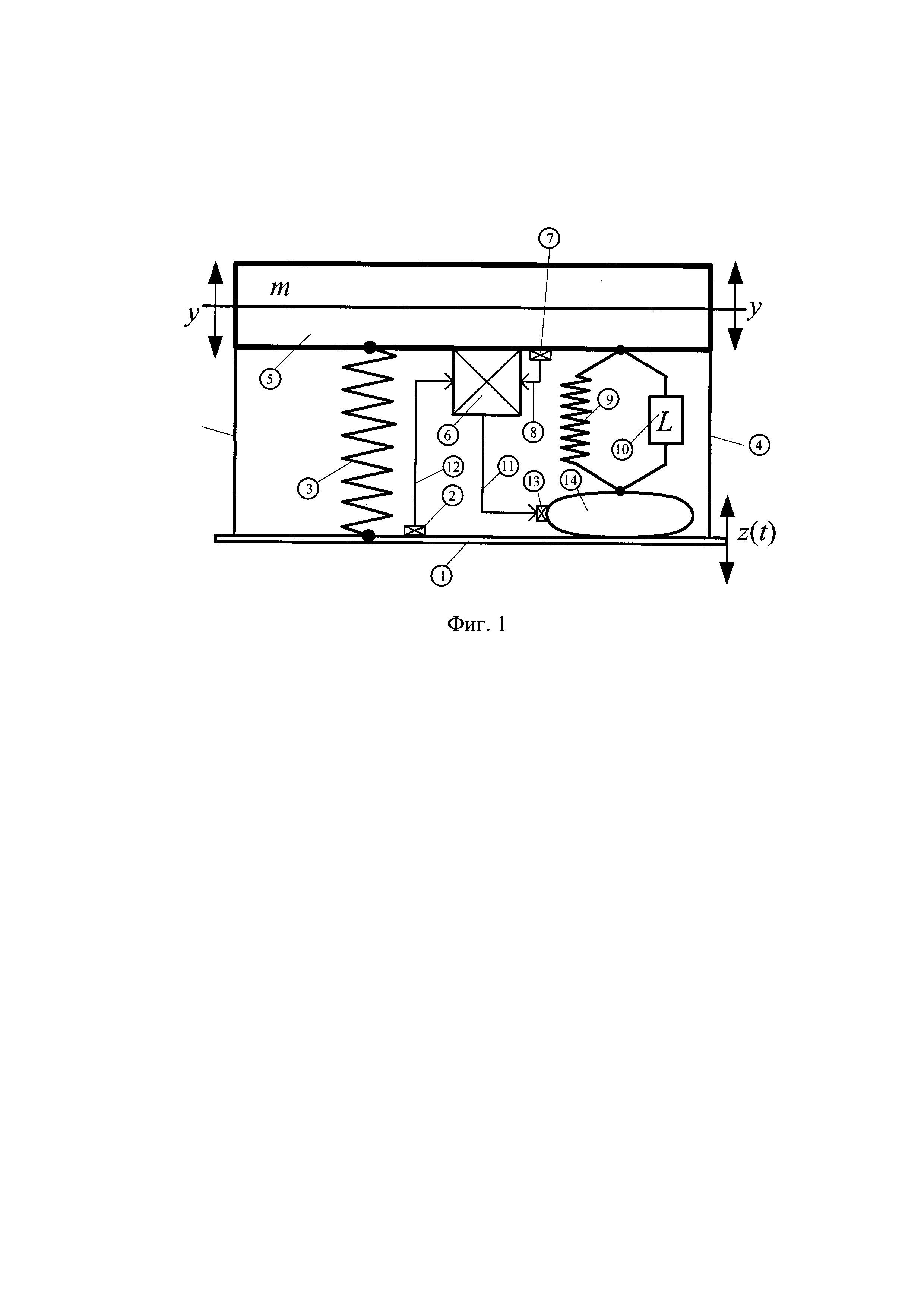
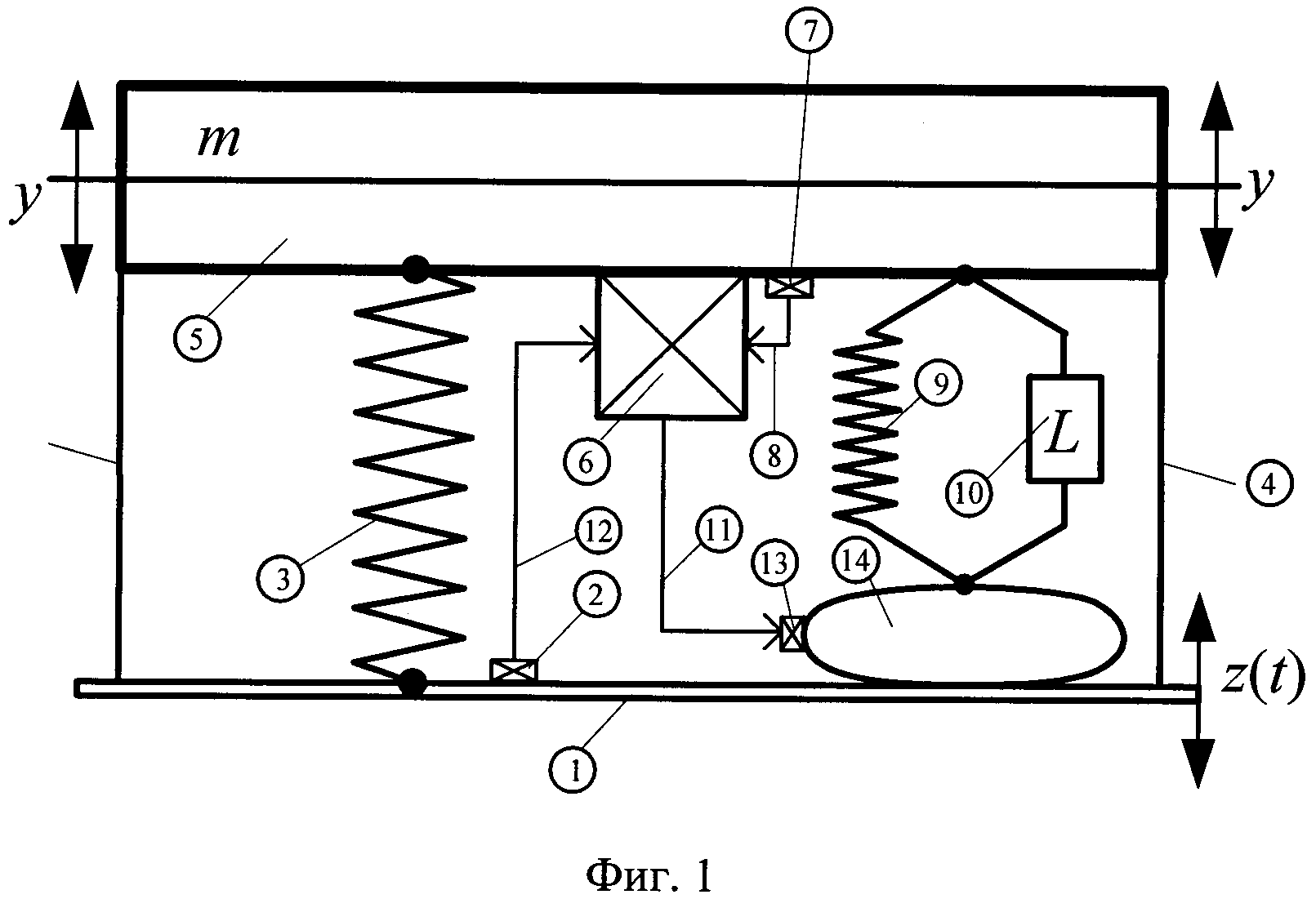
Предлагаемое изобретение (фиг. 1) относится к регулируемым техническим средствам, в которых динамическое состояние защищаемого объекта контролируется с помощью измерительных устройств, поступающая информация обрабатывается с целью получения управляющего сигнала для соответствующих технических средств, динамические параметры которые могут измениться и формировать необходимое динамическое состояние при повышенном уровне вибрационных внешних воздействий.
Сущность предлагаемого способа поясняется чертежами.
На фиг. 1 приведена принципиальная схема предлагаемого устройства, содержащая вибрирующей опорной поверхностью 1, датчики контроля динамического состояния 2, 7, пружины 3, 9, защитный кожух 4, защищаемый объект 5, управляющий блок 6, средства коммуникации 8, 11, 12, устройство для преобразования движения 10, клапан (дроссель) 13, пневмобаллон 14.
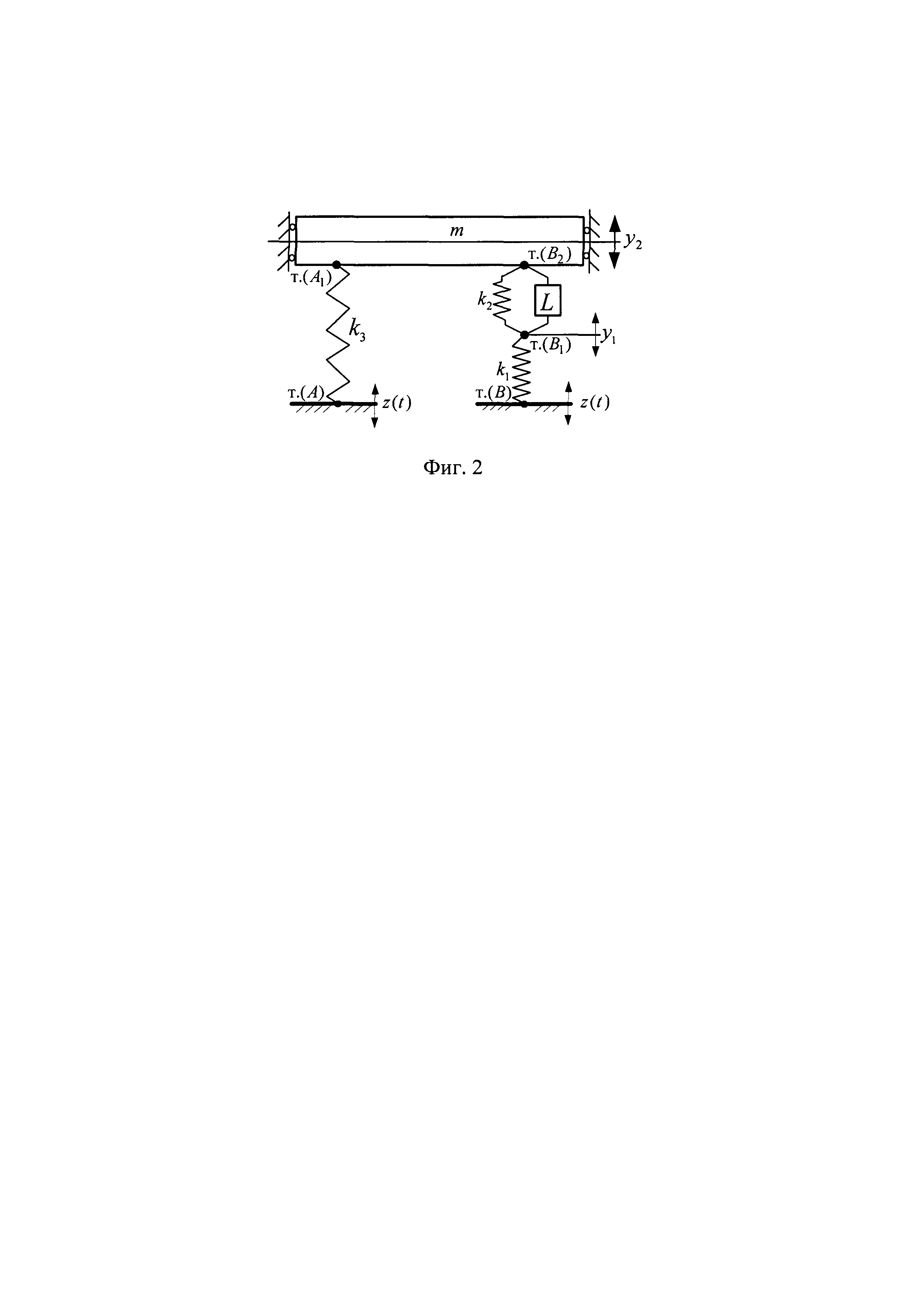
На фиг. 2 показана расчетная схема технического объекта в виде механической колебательной системы.
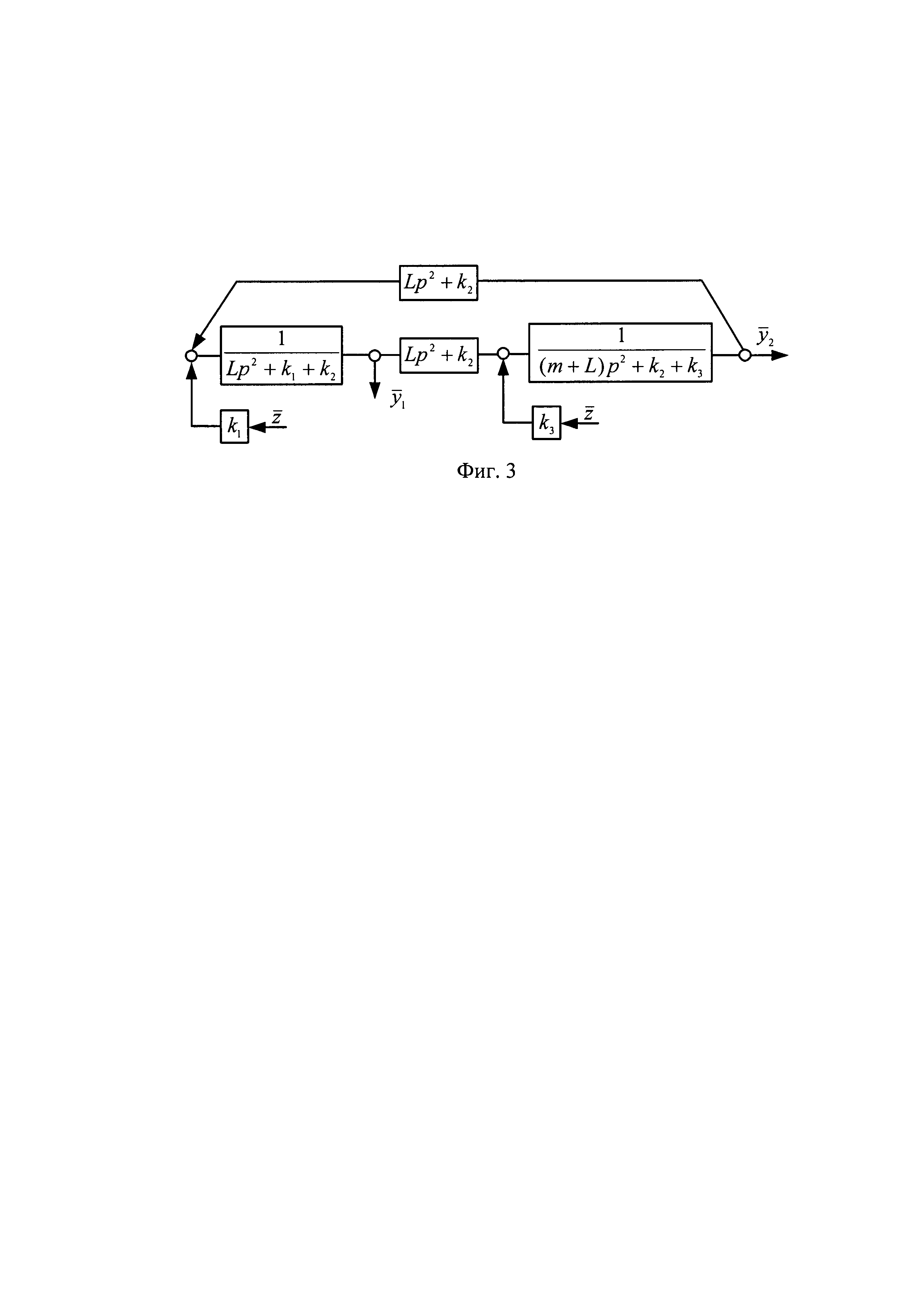
Структурная математическая модель (структурная схема) технического объекта (фиг. 2) приведена на фиг. 3.
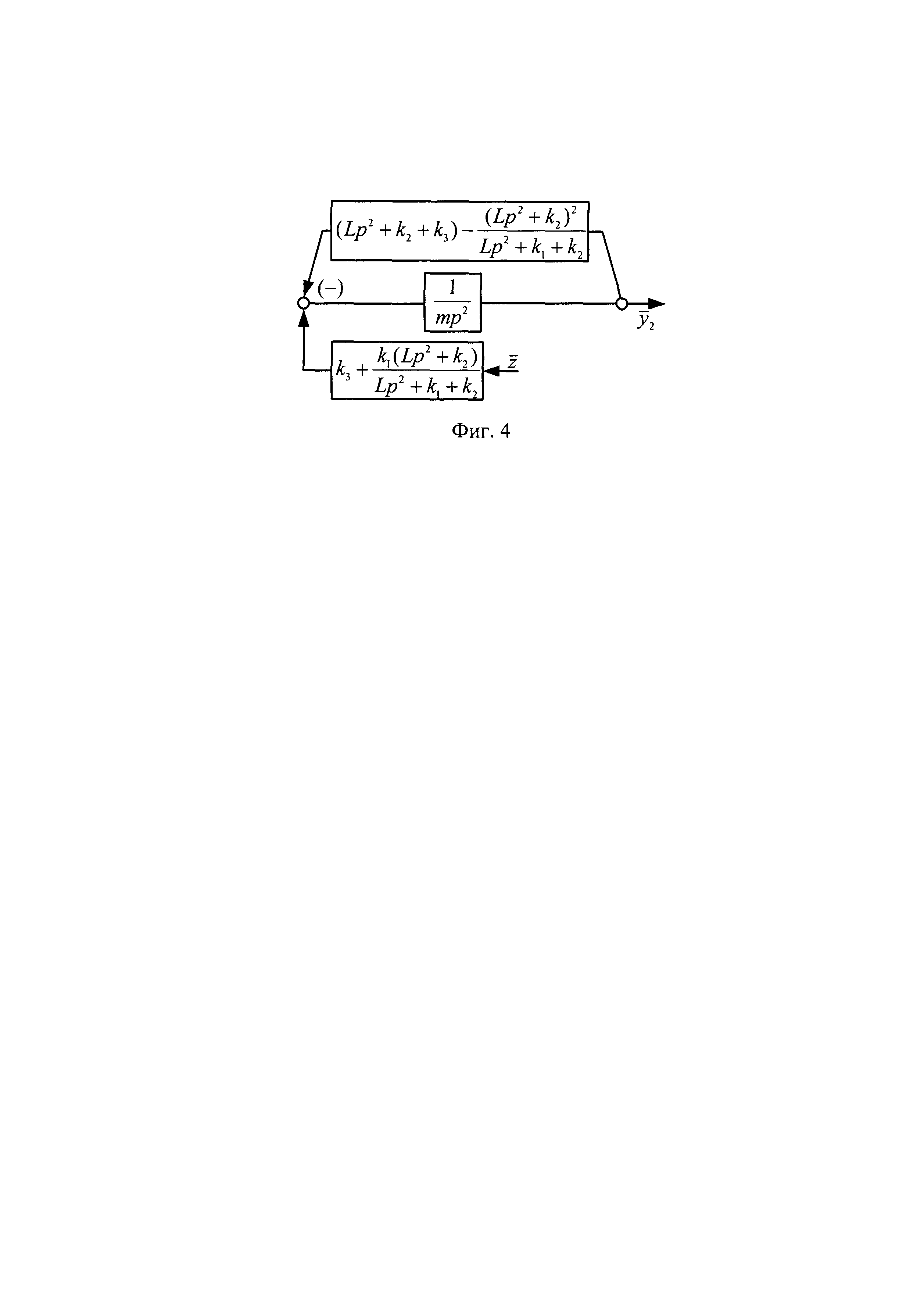
На фиг. 4 представлена преобразованная структурная схема исходной системы (фиг. 3) при исключении координаты y1.
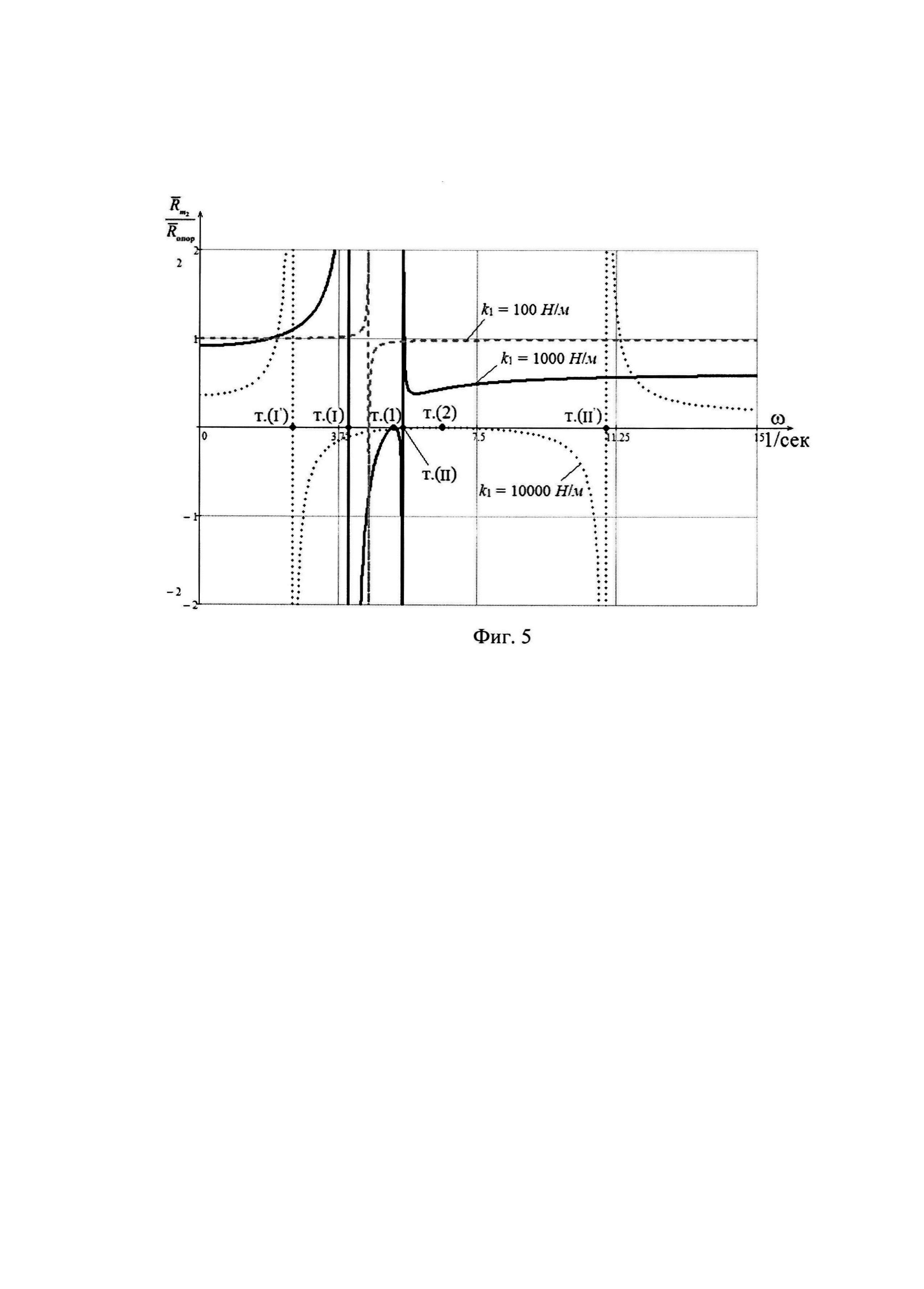
Частотные характеристики реакций связей в зависимости от частоты внешнего воздействия приведены на фиг. 5.
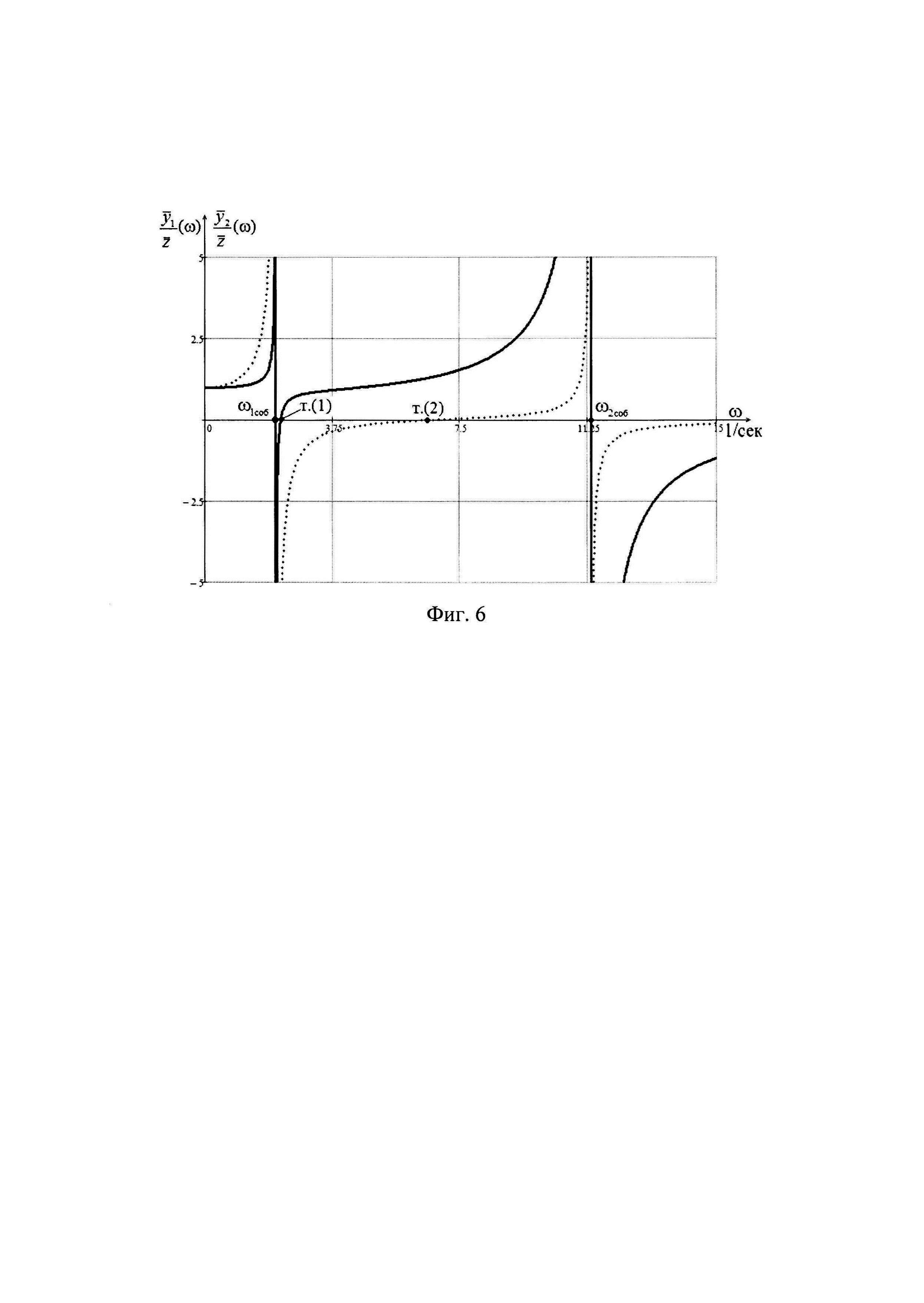
На фиг. 6 показаны амплитудно-частотные характеристики системы при k1=10000 Н/м.
Изобретение работает следующим образом.
Изобретение представляет собой блок, содержащий защищаемый объект 5, контактирующий с вибрирующей опорной поверхностью 1 через пружину 3 с жесткостью k2 и структурное образование, состоящее из параллельно соединенных пружины 9 с жесткостью k3 и устройство для преобразования движения 10. На защищаемом объекте 5 закреплен управляющий блок 6 (снабжен компрессором), куда поступает информация с датчиков контроля динамического состояния 2, 7. состояния через средства коммуникации 8, 12. Средство коммуникации 11 соединяет управляющий блок 6 с пневмобаллоном 14 через клапан (дроссель) 13.
Динамическое состояние системы оценивается при помощи датчиков 2, 7, связанных При получении информации с датчиков контроля состояния в управляющем блоке 6, вырабатывается сигнал, включающий, работу компресса (находится в блоке 6) который через коммуникации 13 продается пневмобаллон 14, обладающий жесткостью k1. Пневмобаллон 13 снабжается также клапаном (дросселем) 10. Сигналы по передаче необходимой информации обеспечиваются средствами коммуникации 8, 11, 12. Вся структура упругих элементов защищена кожухом 4 для предотвращения влияния внешних загрязнений.
Возможности колебательных движений объекта 5 обеспечиваются также упругими элементами 2 и 9 с жесткостями k2 и k3. В структуре системы имеется устройство для преобразования движения, представляющее собой несамотормозящийся винтовой механизм, имеющий гайку-маховик, для введения в систему динамических воздействий, формируемых при относительных движениях элементов устройства.
При действии возмущения, поступающего со стороны опорной площадки (z(t)). В результате динамических взаимодействий элементов виброзащитной системы. Основным блоком создания необходимых динамических эффектов является структурное образование из пружин k1, k2, k3 (элементы 2, 9, 14) и устройство для преобразования движения 10. Пружина k3 выполняет функции предохранительного элемента при отказах в работе пневмоэлемента 10.
При соответствующей настройке системы реализуется режим динамических взаимодействий элементов, при котором происходит снижение уравнения динамических реакций, а также кинематических параметров объекта 5.
Динамическое состояние системы формируется настройкой ее параметров, которые могут изменяться. При получении информации с датчиков контроля состояния 2, 7 в управляющем блоке 6, вырабатывается сигнал, включающий, работу компресса (находится в блоке 6) который через коммуникации 11 продается пневмобаллон 14, обладающий жесткостью k1. Пневмобаллон 14 снабжается также клапаном (дросселем) 13. Сигналы по передаче необходимой информации обеспечиваются средствами коммуникации 8, 11, 12.
Возможности колебательных движений объекта 5 обеспечиваются также упругими элементами 3 и 9 с жесткостями k2 и k3. В структуре системы имеется устройство для преобразования движения, представляющее собой несамотормозящийся винтовой механизм, имеющий гайку-маховик, для введения в систему динамических воздействий, формируемых при относительных движениях элементов устройства.
При действии возмущения, поступающего со стороны опорной площадки (z(t)). В результате динамических взаимодействий элементов виброзащитной системы. Основным блоком создания необходимых динамических эффектов является структурное образование из пружин k1, k2, k3 (элементы 2, 9, 14) и устройство для преобразования движения 10. Пружина k3 выполняет функции предохранительного элемента при отказах в работе пневмоэлемента 10.
При соответствующей настройке системы реализуется режим динамических взаимодействий элементов, при котором происходит снижение уравнения динамических реакций, а также кинематических параметров объекта 5.
Теоретическое обоснование возможностей реализации способа управления динамическим состоянием системы подвески объекта при вибрационных воздействиях и устройство для его реализации
Технический объект, работающий при вибрационном воздействии, в виде твердого тела, совершающего вертикальные колебания на упругих опорах, может быть представлен, как показано на фиг. 2 (тт.(А), (А1), .(В)÷(В2) - характерные точки, в которых возникают реакции связей), механической колебательной системой; в состав системы входят две упругие ветви: одна определяется последовательным соединением упругого элемента k1 и блока из параллельно работающих пружины k2 и устройства для преобразования движения с приведенной массой L.
Характерными точками соединения трех элементов ветви, являются тт.(В), (В1), (В2). Вторая упругая ветвь представлена пружиной жесткость k3 с характерными точками присоединения т.(А) и т.(A1). Опорная поверхность совершает гармонические вибрации z(t). Объект обладает массой m; устройство для преобразования движения (УПД) в рассматриваемом случае реализуется винтовым несамотормозящимся механизмом с гайкой-маховиком массой L; величина этой приведенной массы зависит от параметров УПД [2]

где J - момент инерции гайки-маховика, rср - средний радиус резьбы, α - угол наклона винтовой линии [1].
Движение системы рассматривается в координатах у1 и у2: у2 определяет положение объекта m, координата у1 определяет положение т.(В1), в которой происходит соединение трех элементов системы (пружины с жесткостями k1 и k2 с УПД, имеющие приведенную массу L.
Предполагается, что система обладает линейными свойствами и совершает колебания относительно положения статического равновесия. Система координат связана с неподвижным базисом; силы сопротивления полагаются исчезающими малыми.
1. Математическая модель технического объекта по фиг. 2 может быть представлена в виде системы обыкновенных дифференциальных уравнений 2-го порядка с постоянными коэффициентами. Используя методику, приведенную в [1], найдем выражения для кинетической и потенциальной энергий системы в координатах у1, у2:


Проведем вспомогательные выкладки и запишем уравнения в координатах y1, y2:


После преобразования Лапласа при нулевых начальных условиях система уравнений (4), (5) может быть представлена в операторной форме


где р=jω - комплексная переменная ( ); значок 〈-〉 над переменной означает ее изображение по Лапласу [1, 3].
); значок 〈-〉 над переменной означает ее изображение по Лапласу [1, 3].
Структурная математическая модель в виде структурной схемы эквивалентной в динамическом отношении системы автоматического управления приведена на фиг. 3.
Из фиг. 3 следует, что структурная модель отображает специфические свойства из системы; структура системы сформирована двух парциальных блоков, имеющих упруго-инерционную связь.
При частоте внешнего воздействия

взаимодействие между парциальными частотами нарушается. Для оценки особенностей динамических свойств систем при внешнем гармоническом возмущении (в данном случае это кинематическое возмущение z(t)) определенное значение имеют парциальные частоты:

Парциальные частоты предопределяют, в определенном смысле, возможности динамического гашения колебаний.
2. Передаточные функции исходной системы по рис. 1 могут быть определены из структурной математической модели или структурной схемы на рис. 2:


где

- является характеристическим частотным уравнением системы.
Для оценки динамических реакций связей используется методологическая основа, представленная в работе [4], в соответствии с которой динамическая реакция в характерных точках исходной системы, то есть в точках соединение или контактного взаимодействия ее элементов, может быть найдена как произведение динамической жесткости на величину динамического смещения по рассматриваемой координате.
В общем случае динамическая жесткость зависит от частоты колебаний системы (в данном случае от частоты внешнего кинематического воздействия). В приложении таких подходов к конкретным схемам обычно выделяют динамическую жесткость фрагментов системы и динамические жесткости отдельных элементов или типовых элементарных звеньев.
В работах [1, 4, 5] приводятся состав набор типовых элементарных звеньев рассмотрением упругих, диссипативных, инерционных элементов и устройств для преобразования движения (УПД). В операторной форме (фиг. 3) передаточные функции элементарных звеньев, входящих в структурную математическую модель имеют соответственно вид:
Wупр(p)=k - для обычной линейной системы (k - жесткость пружины);
Wдисс(p)=bp - для диссипативного звена (демпфер вязкого трения);
Wинер(р)=mp2 (или Lp2) - для инерционного звена или устройства для преобразования движения.
Каждое из типовых элементарных звеньев, по существу, в рамках структурного математического моделирования, рассматриваются как элемент, входным сигналом в котором является динамические смещения и выходным - усилие.
В выражениях для передаточных функций системы (11), (12) динамическая жесткость будет определяться путем конверсии этих выражений, что предопределяет представление о характеристическом уравнении (13), то есть знаменателе передаточных функций (11), (12), как динамической жесткости системы, в целом.
Если динамическая жесткость системы, в целом, равна нулю, то это означает, что при действии гармонического внешнего воздействия будет развиваться резонансный режим, когда движение соответствующего инерционного элемента, к которому прикладывается внешнее возмущение, в своих движениях не будет встречать противодействия. Отметим, что приведенное пояснение предполагает отсутствие сил сопротивления.
3. Если система имеет две степени свободы, то динамическая жесткость системы, в целом, будет принимать нулевые значения дважды; такие частоты являются частотами собственных колебаний [3]. Структурная схема на фиг. 3 при рассмотрении динамических реакций в характерных точках, например в т.(В2), может быть преобразована к виду, как показано на фиг. 4. В этом случае элемент m является объектом, динамическое состояние которого оценивается [3]; передаточная функция объекта интерпретируется интегрирующим звеном второго порядка  .
.
В структурной схеме на фиг. 4 цепь отрицательной обратной связи относительно объекта m представляет собой, в физическом смысле динамическую жесткость структурного образования, состоящего из двух ветвей: первая - это пружина с жесткостью k3, вторая - динамическая жесткость фрагмента системы из элементов k1, k2 и L.
4. На основе таких представлений динамические реакции связей в характерных точках системы могут быть записаны в виде:

где  ,
,  ,
,  .
.
Динамическая жесткость  , в выражениях (13), может быть определена, также как передаточная функция отрицательной цепи обратной связи на структурной схеме (фиг. 4), что также можно представить в виде
, в выражениях (13), может быть определена, также как передаточная функция отрицательной цепи обратной связи на структурной схеме (фиг. 4), что также можно представить в виде

что совпадает с ранее полученными результатами в (14). Таким образом, динамические реакции, характеризующие свойства подвески могут быть записаны в виде
Для характеристики свойств подвески вводится передаточная функция динамических связей между реакциями опорной поверхности  и реакций связей
и реакций связей  , создаваемых внешним кинематическим возмущением
, создаваемых внешним кинематическим возмущением 

Из анализа (18) следует, что график N(ω) будет иметь одну частоту обнуления числителя

Знаменатель выражения (18) также может обнуляться на двух частотах:

Отметим, что выражение (20) совпадает с парциальной частотой (9).
При р=0 (то есть при ω→0) получим, что

При р→∞ (то есть при ω→∞) получим, что

Для численного моделирования выбраны следующие параметры системы (фиг. 2): k1=100 Н/м; 1000 Н/м; 10000 Н/м; k2=2000 Н/м; k3=3000 Н/м; L=100 кг; m=1000 кг. На фиг. 5 сплошная линия  соответствует графику N(ω) при k1=1000 Н/м; точечная
соответствует графику N(ω) при k1=1000 Н/м; точечная  штриховая линия
штриховая линия 
Частотные характеристики динамических реакций связей имеют резонансные частоты: для графика  частоты собственных колебаний обозначены точками тт. (I), (II); для k1=10000 Н/м - тт. (I'), (II'); для k1=100 Н/м - тт. (I''), (II''), которые практически «сливаются». В точках резонанса соотношения реакций связей принимает бесконечно большие значения.
частоты собственных колебаний обозначены точками тт. (I), (II); для k1=10000 Н/м - тт. (I'), (II'); для k1=100 Н/м - тт. (I''), (II''), которые практически «сливаются». В точках резонанса соотношения реакций связей принимает бесконечно большие значения.
Детализация представлений о динамических взаимодействиях связана с рассмотрением зависимостей N(ω) при трех значениях k1. Наиболее интересным вариантом набора параметров является N(ω) при k1=10000 Н/м. В этом случае легко выделяются частотные диапазоны, где N(ω)<0. В таких ситуациях динамические воздействия со стороны опорной поверхности передаются в существенно уменьшенном виде, что создает благоприятные условия для защиты объекта в характерных точках (А), (В2), показанных на фиг. 2.
На фиг. 6 приводятся для таких условий возмущения амплитудно-частотные характеристики  и
и  . При этом графики
. При этом графики  обозначены сплошной линией
обозначены сплошной линией  , а графики
, а графики  - точечной
- точечной  .
.
Сравнение графиков, рассматривает для N(ω),  и
и  в одном и том же диапазоне, подтверждает принципиальную возможность получения компромиссного варианта, когда приемлемыми становятся и величины динамических реакций и смещений объекты защиты.
в одном и том же диапазоне, подтверждает принципиальную возможность получения компромиссного варианта, когда приемлемыми становятся и величины динамических реакций и смещений объекты защиты.
Таким образом, предлагаемый способ управления и изменения динамического состояния имеет теоретические основы, позволяющие разработку соответствующих алгоритмов управления. Идея способа изменения динамического состояния основана на рассмотрении соотношений динамических реакций связей между составляющими элементами, когда они контактируют одновременно как с объектом защиты, так и с основанием. Отношение амплитуд динамических реакций предлагается как форма контроля за формированием необходимых условий. Если отношение реакций меньше единицы, то вибрационное возмущение, поступающее со стороны опорной поверхности уменьшается. При нулевом значении отношения вибрационное воздействие не проходит на объект и «демпфируется» или «рассеивается» при динамических взаимодействиях.
Такие условия создаются действием УПД. Настройка системы на эффектные режимы работы осуществляется с помощью изменения жесткости опорного пневматического баллона. При изменении жесткости такого упругого элемента при изменении осуществляет воздуха в баллоне позволяет осуществлять необходимую настройку, выбирая частотные полосы, с тем или иным уровнем подавления вибраций.
Устройство для реализации способа отличается возможностью многостороннего формирования и реализации динамических эффектов влияния на уровень вибрации из-за последовательного соединения УПД и управляемого пневмобаллона, создающего необходимые параметры настройки. Процесс поддержания необходимых параметров динамического состояния достаточно просто автоматизируется, что нашло отражение в описании принципиальной схемы на фиг. 1.
Введение соотношений между величинами динамических реакций связей в характерных точках системы подвески принудительно отличается от известных методов, ориентированных на кинематические параметры движения объекта и элементов системы. Отличие заключается в возможности одновременного сочетания учета обеспечения надежности работы и удовлетворительного уровня снижения параметров кинематического класса.
Список литературы
1. Фролов К.В. Прикладная теория виброзащитных систем / К.В. Фролов, Ф.А. Фурман. - М.: Машиностроение, 1980. - 276 с.
2. Белокобыльский С.В. Прикладные задачи структурной теории виброзащитных систем / С.В. Белокобыльский, С.В. Елисеев, В.Б. Кашуба. - СПб.: Политехника, 2013. - 363 с.
3. Елисеев С.В. Прикладная теория колебаний в задачах динамики линейных механических систем / С.В. Елисеев, А.И. Артюнин. - Новосибирск: Наука, 2016. - 459 с.
4. Галиев И.И. Методы и средства виброзащиты железнодорожных экипажей / И.И. Галиев, В.А. Нехаев, В.А. Николаев. - М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2010. - 340 с
5. Дембаремдикер А.Д. Амортизаторы транспортных машин / А.Д. Дербаремдикер. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1985. - 200 с.
6. Eliseev S.V. Dynamics of Mechanical Systems with Additional Ties / S.V. Eliseev, A.V. Lukyanov, Yu.N. Reznik, A.P. Khomenko. - Irkutsk: Irkutsk State University, 2006. - 315 p
7. Коренев Б.Г. Динамические гасители колебаний: теория и технические приложения / Б.Г. Коренев, Л.М. Резников. - М.: Наука. Главная редакция физико-математической литературы, 1988. - 304 с.
8. Елисеев С.В. Динамическое гашение колебаний: концепция обратной связи и структурные методы математического моделирования / С.В. Елисеев, А.П. Хоменко. - Новосибирск: Наука, 2014. - 357 с.
Маховик с регулируемым моментом инерции
Укупорочное устройство с индикацией вскрытия
Способ настройки режимов работы виброзащитной системы и устройство для его осуществления
Способ и устройство для динамического гашения колебаний
Способ контроля устойчивости бесстыкового рельсового пути
Поглощающее лазерное излучение покрытие и способ его получения
Способ оценки технического состояния инженерного сооружения
Способ и устройство оценки технического состояния инженерного сооружения
Способ управления характеристикой вибрационного поля и устройство для его осуществления
Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления

