Результат интеллектуальной деятельности: Способ компенсации помех (варианты) и радиолокационная станция для его осуществления
Вид РИД
Изобретение
Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты от импульсных, в том числе, ответных помех.
Большие проблемы работе РЛС создают преднамеренные активные, в том числе, импульсные помехи [Справочник. Радиотехнические системы. Основы построения и теория. Под редакцией Я.Д. Ширмана гл. 6.4.1, с. 79], воздействующие на РЛС по главному лучу и боковым лепесткам диаграммы направленности антенны (ДНА) [Защита от радиопомех, под ред. М.В. Максимова, М. Сов. Радио, 1976 г, с. 60]. Импульсные помехи энергетически более выгодны для постановщика, так как при небольшой средней мощности импульсная мощность помехи может значительно превышать уровень непрерывной помехи. В результате действия импульсных помех происходят ложные обнаружения целей. При достаточно большой мощности помехи она обнаруживается не только в главном луче, но и при приеме с бокового направления боковыми лепестками ДНА, в результате чего при частоте следования импульсов значительно превышающей частоту зондирования создается большое число ложных сигналов (отметок) хаотических или неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью, в случае синхронной ответной помехи. Во всех случаях импульсы помехи воспринимаются как отраженные от целей, поэтому по ним выполняют захват и завязку трассы [С.З. Кузьмин - Основы проектирования систем цифровой обработки радиолокационной информации стр. 109] с последующим ее сбросом, в случае несинхронной помехи, или ведением ложной трассы, в случае синхронной помехи с изменяющейся задержкой. В результате ответная помеха приводит к перегрузке устройств РЛС.
Известен способ защиты РЛС от синхронных помех путем их распознавания [патент RU №2554092], в котором решаемой проблемой является распознавание ответной помехи, в двух вариантах. Технический результат достигается путем получения эталонов (образцов) помехи, по которому все сигналы, имеющие признаки эталонов, считают помехой. По первому варианту проблема решается тем, что при очередном зондировании изменяют параметры зондирующего сигнала, но при этом принимают сигналы с предыдущими параметрами, считают их сигналами ответной помехи и используют для получения признаков этой помехи, которые могут содержаться в совокупности принимаемых сигналов с измененными параметрами, которые в этом случае так же считают помехой. После определения признаков помехи используют сигналы с прежними параметрами, что обеспечивает возможность осуществления селекции движущихся целей (СДЦ). Зоной, где прием сигналов осуществляется с предыдущими параметрами, считают интервал времени второго периода до появления сигнала с измененным параметром. Принятые в этой зоне сигналы считают ответной помехой.
Суть способа по второму варианту состоит в том, что при изменении параметров сигнала в соседних периодах, сохраняют значение несущей частоты и спектра сжатого сигнала. В отличие от первого варианта при этом не требуется возврат к предыдущим параметрам зондирующего сигнала, поскольку сохраняется работа СДЦ по сигналам с новыми параметрами. В качестве изменяемого параметра при частотной модуляции сигнала, например, используют изменение наклона частотной модуляции на обратный. При этом сохраняется спектральная полоса сигнала. В случае применения фазовой модуляции полоса сигнала так же не изменяется и после сжатия сигнала сохраняется возможность работы СДЦ. В качестве признака помехи считают появление сигнала на выходе фильтра, настроенного на предыдущий вид модуляции.
Недостаток известных способов состоит в том, что при наложении более мощного импульса помехи, принимаемого с бокового направления на отраженный сигнал от цели, принимаемый главным лучом, отраженный сигнал будет принят за помеху. Чтобы выделить отраженный сигнал из смеси с помехой необходимо ее компенсировать.
Известен наиболее близкий к предлагаемому способ компенсации непрерывных помех [Справочник. Радиотехнические системы. Основы построения и теория. Под редакцией Я.Д. Ширмана, гл. 25.4.2, с. 436], основанный на приеме сигналов двумя приемными каналами - основным и дополнительным, автоматической настройке параметров автокомпенсатора, обеспечивающих вычитание сигналов, принимаемых с направления на источник помехи. Это достигается тем, что в процессе управления в автокомпенсаторе происходит выравнивание амплитуды и фазы только коррелированной части сигналов основного и дополнительного каналов с последующим их вычитанием. Исключение возможности подавления отраженного от цели сигнала при этом достигается за счет отличительного признака сигнала и помехи, заключающегося в различной протяженности во времени непрерывной помехи и сравнительно коротких отраженных от цели сигналов. Благодаря этой разнице подстройка параметров автокомпенсатора на помеху происходит за время, большее чем длительность отраженного от цели сигнала. Поэтому автокомпенсатор не может компенсировать отраженный от цели сигнал, но при этом автокомпенсатор не может компенсировать и импульсные помехи.
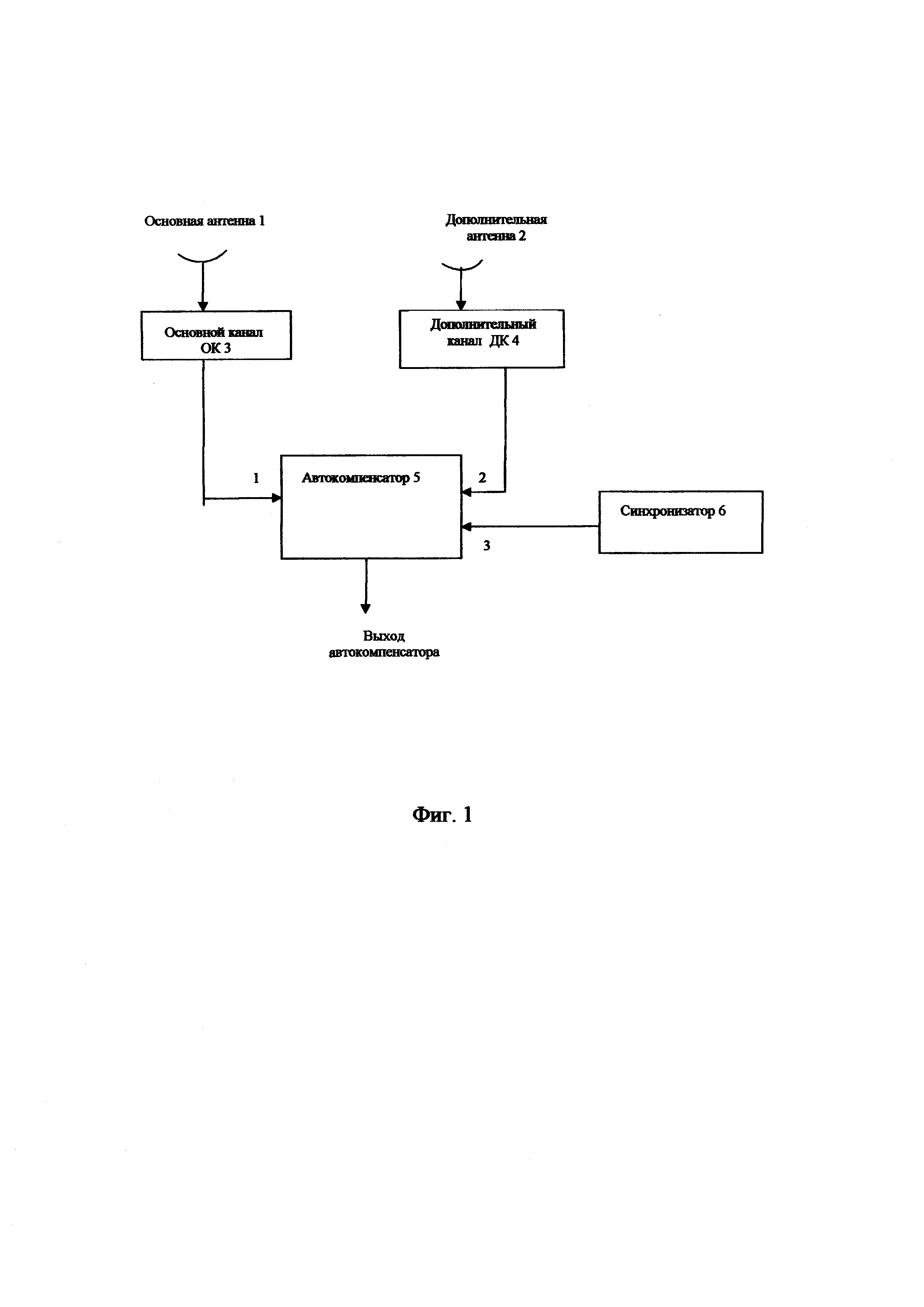
Известно наиболее близкое к предлагаемому устройство, входящее в РЛС [там же гл. 25.4.3 с. 436] (фиг. 1), содержащую две антенны, основную 1 и дополнительную 2, два приемных канала - основной (ОК) 3, канал дополнительный (ДК) 4, автокомпенсатор 5 и синхронизатор 6, выход основной антенны 1 соединен с входом ОК 3, выход дополнительной антенны 2 соединен с входом ДК 4, выходы ОК 3 и ДК 4 соединены с первым и вторым входами автокомпенсатора 5 соответственно, выход синхронизатора 6 соединен с третьим входом автокомпенсатора.
РЛС, осуществляющая известный способ, работает следующим образом. Непрерывная помеха, принятая основной антенной 1 и антенной 2, поступает через основной канал 3 и дополнительный канал 4 на первый и второй входы автокомпенсатора 5 соответственно. В автокомпенсаторе происходит автоматическое выравнивание амплитуды и фазы помехи, принятой основным и дополнительным каналами, и их вычитание. При этом на выходе автокомпенсатора 5 происходит компенсация помехи. Синхронизатор 6 задает последовательность периодов повторения зондирующего импульса.
Постоянную времени срабатывания автокомпенсатора выбирают много большей, чем длительность отраженного зондирующего импульса, для того, чтобы автокомпенсатор за время действия отраженного сигнала не успевал его скомпенсировать. Это исключает возможность подавления сигнала от цели, но это и не позволяет компенсировать импульсную помеху Поскольку ее протяженность во времени совпадает с протяженностью сигнала. Поэтому автокомпенсаторы не применяют для компенсации импульсных помех.
Недостаток наиболее близкого известного способа состоит в том, что способ не обеспечивает компенсации импульсных помех.
Таким образом, решаемой технической проблемой (техническим результатом) является компенсация импульсной помехи, при исключении компенсации сигналов, отраженных от цели.
Техническая проблема компенсации импульсной помехи решается на основе распознавания импульсов помехи по признакам, отличающим импульсы помехи от сигналов, и настройке автокомпенсатора только на распознанные импульсы помехи, за счет использования известных способов распознавания ответной помехи [патент RU №2554092].
Поставленная проблема (технический результат) по первому варианту решается тем, что в способе компенсации помех радиолокационной станции, основанном на приеме сигналов основным и дополнительным каналами, на настройке параметров автокомпенсатора, обеспечивающих вычитание сигналов, принимаемых с направления на источник помех, согласно изобретению при очередном зондировании изменяют параметры зондирующего сигнала, настройку параметров автокомпенсатора выполняют по сигналам с предыдущими параметрами, после чего зондируют пространство сигналами с предыдущими параметрами.
Поставленная проблема (технический результат) по второму варианту решается тем, что в способе компенсации помех радиолокационной станции, основанный на приеме сигналов основным и дополнительным каналами, на настройке параметров автокомпенсатора, обеспечивающих вычитание сигналов, принимаемых с направления на источник помех, согласно изобретению изменяют параметры зондирующего сигнала с сохранением несущей частоты и спектра сигнала, настройку параметров автокомпенсатора выполняют по сигналам с предыдущими параметрами, после чего зондируют пространство сигналами со спектром, на который настроен автокомпенсатор
Поставленная проблема (технический результат) решается так же тем, что в способе компенсации помех радиолокационной станции по второму варианту, согласно изобретению при изменении параметра в частотно-модулированном сигнале изменяют наклон частотной модуляции на обратный.
Поставленная проблема (технический результат) решается так же тем, что в способе компенсации помех радиолокационной станции по второму варианту, согласно изобретению при изменении параметра изменяют фазовую модуляцию.
Поставленная проблема (технический результат) решается тем, что в радиолокационную станцию для осуществления способа компенсации помех, содержащую основную антенну, дополнительную антенну, основной и дополнительные каналы, автокомпенсатор, синхронизатор, выходы антенн соединены с входами соответствующих каналов, выходы каналов соединены с первым и вторым входами автокомпенсатора соответственно, согласно изобретению введено устройство стробирования автокомпенсатора, первый вход которого соединен со вторым выходом дополнительного канала, второй вход устройства стробирования соединен со вторым выходом синхронизатора, а выход соединен с четвертым входом автокомпенсатора.
Суть работы способа по первому варианту заключается в следующем (фиг. 2).
После изменения параметра сигнала синхронизатор в начале следующего периода, там где наличие сигнала, отраженного от цели с новыми параметрами невозможно, принимают импульсы ответной помехи с предыдущими параметрами и включают устройство стробирования, которое формирует строб на время действия импульса помехи, который включает автокомпенсатор на время его действия. Автокомпенсатор во время действия строба осуществляет настройку, точность которой увеличивается при последовательном действии стробов, что обеспечивает подавление импульсов ответной помехи. В последующих периодах синхронизатор, с помощью устройства стробирования, при приеме импульса помехи вновь переводит автокомпенсатор в активный режим для уточнения параметров настройки автокомпенсатора. Таким образом, автокомпенсатор за счет стробирования позволяет компенсировать только импульсную помеху, принимаемую боковыми лепестками диаграммы направленности основной антенны (ДНА) с направления на постановщик помехи.
Суть работы способа по второму варианту заключается в следующем. Если в РЛС применяют сигнал с частотной модуляцией, то при изменении наклона частотной модуляции на противоположный сохраняется спектр сигнала. Таким образом при смене параметра сигнала компенсация помехи будет возможна в обоих случая. Таким образом, после смены наклона ЧМ сигнала включают автокомпенсатор и настраивают его параметры по предыдущему виду ЧМ, по которому отраженные от цели сигналы могут поступать. Параметры автокомпенсатора, настроенные по предыдущему виду частотной модуляции (ЧМ), обеспечивают компенсацию ответных сигналов помехи с измененным видом ЧМ, так как несмотря на изменение наклона ЧМ, спектр помехи сохраняется и сохраняются амплитудные и фазовые соотношения сигналов в основном и дополнительном каналах, потому, что сохраняется направление на источник помехи. Отраженные от цели сигналы отличаются от сигналов ответной помехи и фазой, и амплитудой из-за разных угловых положений цели и постановщика помехи и поэтому не могут быть скомпенсированы.
Изобретения иллюстрируется чертежами: фиг. 1 - схема РЛС для осуществления способа - прототипа; фиг. 2 - схема РЛС для осуществления заявленного способа.
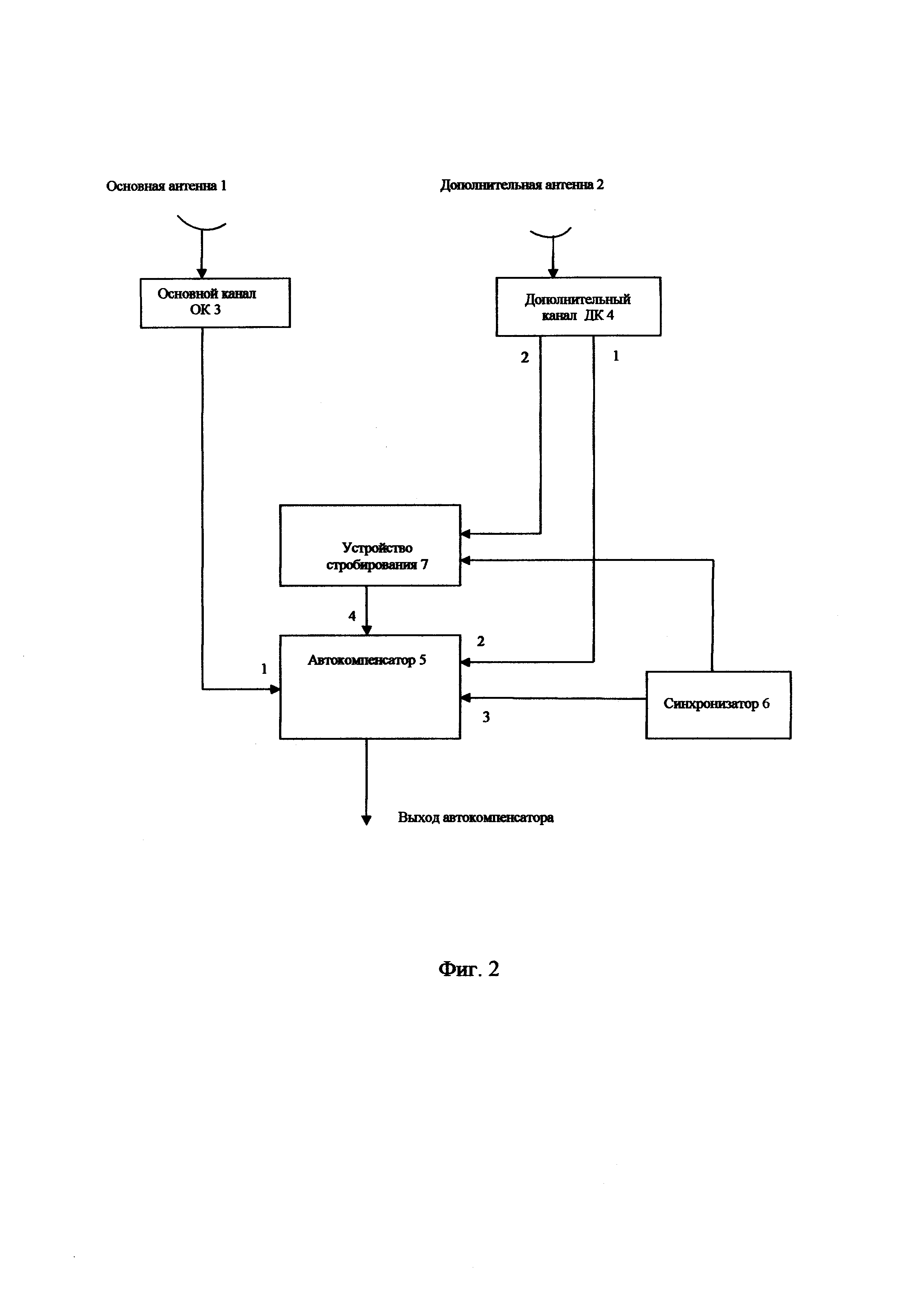
Заявленная РЛС для осуществления способа компенсации помехи (фиг. 2) содержит основную антенну 1 и дополнительную антенну 2, основной канал 3 и дополнительный канал 4, автокомпенсатор 5, синхронизатор 6, устройство стробирования 7, выходы антенн 1 и 2 подключены соответственно к входам каналов ОК 3 и ДК 4, выход ОК 3 соединен с первым входом автокомпенсатора 5, выход ДК 4 соединен со вторым входом автокомпенсатора 5, выход устройства стробирования 7 соединен с четвертым входом автокомпенсатора 5, первый выход синхронизатора 6 соединен третьим входом автокомпенсатора 5, а второй выход соединен со вторым входом устройства стробирования 7, второй выход ДК4 соединен с первым входом устройства стробирования 7.
Рассмотрим более подробно осуществимость способа (фиг. 2) на конкретном примере. Сигналы с прежними параметрами, принятые основной 1 и дополнительной 2 антеннами после изменения параметра излученного сигнала в начале периода, определяемого синхронизатором 6, поступают соответственно в ОК 3 и ДК 4, синхронизатор 6 включает устройство стробирования 7 и определяет периоды повторения в работе автокомпенсатора 5. Сигналы с прежними параметрами с выхода ОК 3 поступают на вход 1 автокомпенсатора 5, сигналы с выхода ДК 4 поступают на второй вход автокомпенсатора 5. Устройство стробирования 7 формирует строб, включающий автокомпенсатор на время его действия. Под стробом в импульсном режиме происходит подстройка параметров автокомпенсатора 5 по сигналам с прежними параметрами таким образом, чтобы в направлении на постановщик помех происходила компенсация сигналов, принятых основной антенной. В момент окончания импульса с прежними параметрами синхронизатор выключает строб и автокомпенсатор перестает подстраивать свои параметры до появления следующего строба. Через период, когда вновь излучается сигнал с предыдущими параметрами, помеха будет скомпенсирована счет не изменившихся параметров настройки автокомпенсатора, а отраженные сигналы, принятые главным лучом основной антенны не компенсируются, так как из- за углового разноса цели и постановщика помехи амплитудно-фазовые соотношения в каналах отраженных сигналов не совпадают с таковыми импульсов помехи, на которые настроен автокомпенсатор.
Суть работы автокомпенсатора 5 в этом случае сводится к тому, что он включается устройством стробирования 7 по команде синхронизатора 6 в в начале периода после изменения параметра сигнала, когда прием отраженных от целей сигналов невозможен так как РЛС настроена на прием сигналов с предыдущими параметрами. При этом автокомпенсатор 5 включается только при появлении импульса помехи на время его действия и он начинает компенсировать этот импульс. При окончании импульса помехи, состояние автокомпенсатора 5 сохраняется до появления следующего импульса. При окончании импульса помехи строб выключают и параметры автокомпенсатора не меняются до следующего строба, т.е. до появления следующего импульса помехи. При появлении следующего импульса помехи включают строб и автокомпенсатор 5 вновь продолжает работать, увеличивая глубину подавления импульсов помехи, подстраивая параметры автокомпенсатора 5 последовательно от импульса к импульсу, доводя подавление помехи до максимально возможного значения. Включение синхронизатором 6 следующего периода служит сигналом для выключения устройства стробирования 7, при этом параметры автокомпенсатора больше не меняются до следующего включения строба.
Причинно- следственная связь между поставленной проблемой, состоящей в компенсация импульсной помехи и сохранении условий приема сигналов, отраженных от цели, и признаками изобретения состоит в том, что в формулу изобретения по п. 1 включен признак « при очередном зондировании изменяют параметры зондирующего сигнала, настройку параметров автокомпенсатора выполняют по сигналам с предыдущими параметрами, после чего зондируют пространство сигналами с прежними параметрами», а по п. 2 включен признак «изменяют параметры зондирующего сигнала с сохранением частоты и спектра сигнала, настройку параметров автокомпенсатора выполняют по сигналам с предыдущими параметрами», что обеспечивает компенсацию импульсной помехи и сохранение условий приема сигналов отраженных от цели. Таким образом, решается проблема компенсации автокомпенсатором импульсных помех, принятых с направления на постановщик помех.
Способ двухэтапного радиолокационного обзора пространства (варианты)
Способ сопровождения цели и способ излучения и приема сигнала
Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления
Способ радиолокационного обзора пространства (варианты)
Способ радиолокационного обзора пространства (варианты)
Двухэтапный способ радиолокационного обнаружения цели
Способ двухэтапного радиолокационного обнаружения цели
Способ изготовления хроматографического генератора технеция-99m облученным нейтронами молибденом-98
Способ радиолокационного обзора пространства
Генератор для получения стерильных радиоизотопов

