Результат интеллектуальной деятельности: ВЫЯВЛЕНИЕ СВЕСА ПОЛУПРИЦЕПА ДЛЯ АКТИВНОГО СОДЕЙСТВИЯ ПАРКОВКЕ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к выполняемой с содействием постановке на стоянку транспортного средства, а конкретнее, к выявлению свеса полуприцепа для активного содействия парковке.
УРОВЕНЬ ТЕХНИКИ
Полуавтономное транспортное средство является транспортным средством, которое нормально эксплуатируется водителем, но некоторые специализированные функции автономны. Например, некоторые транспортные средства имеют адаптивное устройство автоматического поддержания скорости движения или автопилот, которое содействует, в некоторых обстоятельствах, транспортному средству в управлении его скоростью и соблюдению дистанции независимо от водительского ввода для управления. Все больше и больше транспортные средства оборудованы функциями содействия парковке, которые будут ставить на стоянку транспортное средство.
СУЩНОСТЬ ИЗОБРЕТЕНЕИЯ
Прилагаемая формула изобретения устанавливает предлагаемого изобретения. Настоящее изобретение обобщает аспекты вариантов осуществления и не должно использоваться для ограничения формулы изобретения. Другие реализации предполагаются в соответствии с технологиями, описанными в материалах настоящей заявки, как будет очевидно рядовому специалисту в данной области техники по изучению нижеследующих чертежей и подробного описания, и подразумевается, что эти реализации должны подпадать под объем этой заявки.
Раскрыты примерные варианты осуществления применительно к выявлению свеса полуприцепа для активного содействия парковке. Одним аспектом изобретения является транспортное средство, содержащее:
первый датчик дистанционного обнаружения;
второй датчик дистанционного обнаружения, отличный от первого датчика дистанционного обнаружения; и
блок содействия парковке для:
выявления, с помощью первого и второго датчиков дистанционного обнаружения, второго транспортного средства со свесом, прилегающим к месту стоянки; и
широковещательно передают, с помощью модуля DSRC, сообщение, включающее в себя свойства места стоянки с учетом свеса.
При этом, блок содействия парковке должен выгружать свойства места стоянки в навигационную систему.
При этом, первый датчик дистанционного обнаружения является ультразвуковым датчиком, а второй датчик дистанционного обнаружения является одним из камеры или лазерного локатора.
При этом, свойства включают в себя расположение места стоянки, первый размер места стоянки, второй размер свеса и время.
При этом, блок содействия парковке должен выявлять второе транспортное средство со свесом, прилегающим к месту стоянки, когда транспортное средство отыскивает место стоянки.
При этом, блок содействия парковке должен выявлять второе транспортное средство со свесом, прилегающим к месту стоянки, когда транспортное средство не отыскивает место стоянки и проезжает место стоянки.
При этом, блок содействия парковке должен, когда введено в действие обнаружение стоянки:
агрегировать список мест стоянки в пределах порогового расстояния от транспортного средства на основании сообщений, принятых через модуль DSRC, которые включают в себя свойства мест стоянки; и
выбирать целевое место стоянки из списка мест стоянки на основании размеров целевого места стоянки с учетом свеса и размеров транспортного средства.
Другим аспектом изобретения является способ, содержащий этапы, на которых:
выявляют, с помощью первого и второго датчиков дистанционного обнаружения, первое транспортное средство со свесом, прилегающим к месту стоянки, второй датчик дистанционного обнаружения отличен от первого датчика дистанционного обнаружения;
определяют свойства места стоянки с учетом свеса; и
широковещательно передают, с помощью модуля DSRC, сообщение, включающее в себя свойства места стоянки.
Способ также содержит этап, на котором выгружают свойства места стоянки в навигационную систему.
При этом, первый датчик дистанционного обнаружения является ультразвуковым датчиком, а второй датчик дистанционного обнаружения является одним из камеры или лазерного локатора.
При этом, свойства включают в себя расположение места стоянки, первый размер места стоянки, второй размер свеса и время.
При этом, выявляют первое транспортное средство со свесом, прилегающим к месту стоянки, когда второе транспортное средство отыскивает место стоянки.
При этом, выявляют первое транспортное средство со свесом, прилегающим к месту стоянки, когда второе транспортное средство находится в движении и проезжает место стоянки.
При этом, когда введено в действие обнаружение стоянки:
агрегируют список мест стоянки в пределах порогового расстояния от второго транспортного средства на основании сообщений, принятых через модуль DSRC, которые включают в себя свойства мест стоянки; и
выбирают целевое место стоянки из списка мест стоянки на основании размеров целевого места стоянки
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения, может быть сделана ссылка на варианты осуществления, показанные на нижеследующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть опущены или, в некоторых случаях, могли быть преувеличены пропорции, с тем чтобы подчеркнуть и ясно проиллюстрировать обладающие новизной признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые номера ссылок обозначают соответствующие части на всем протяжении нескольких видов.
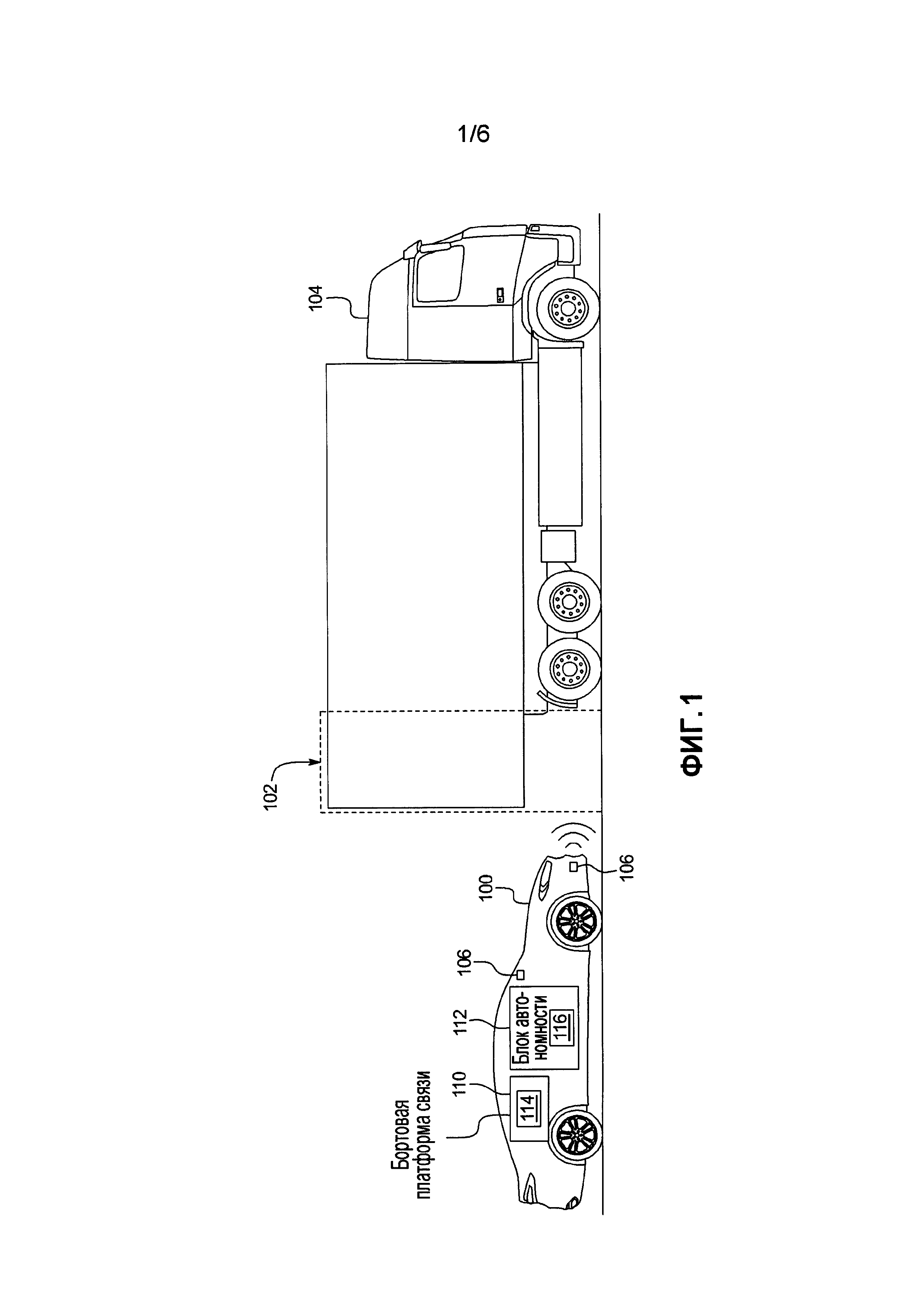
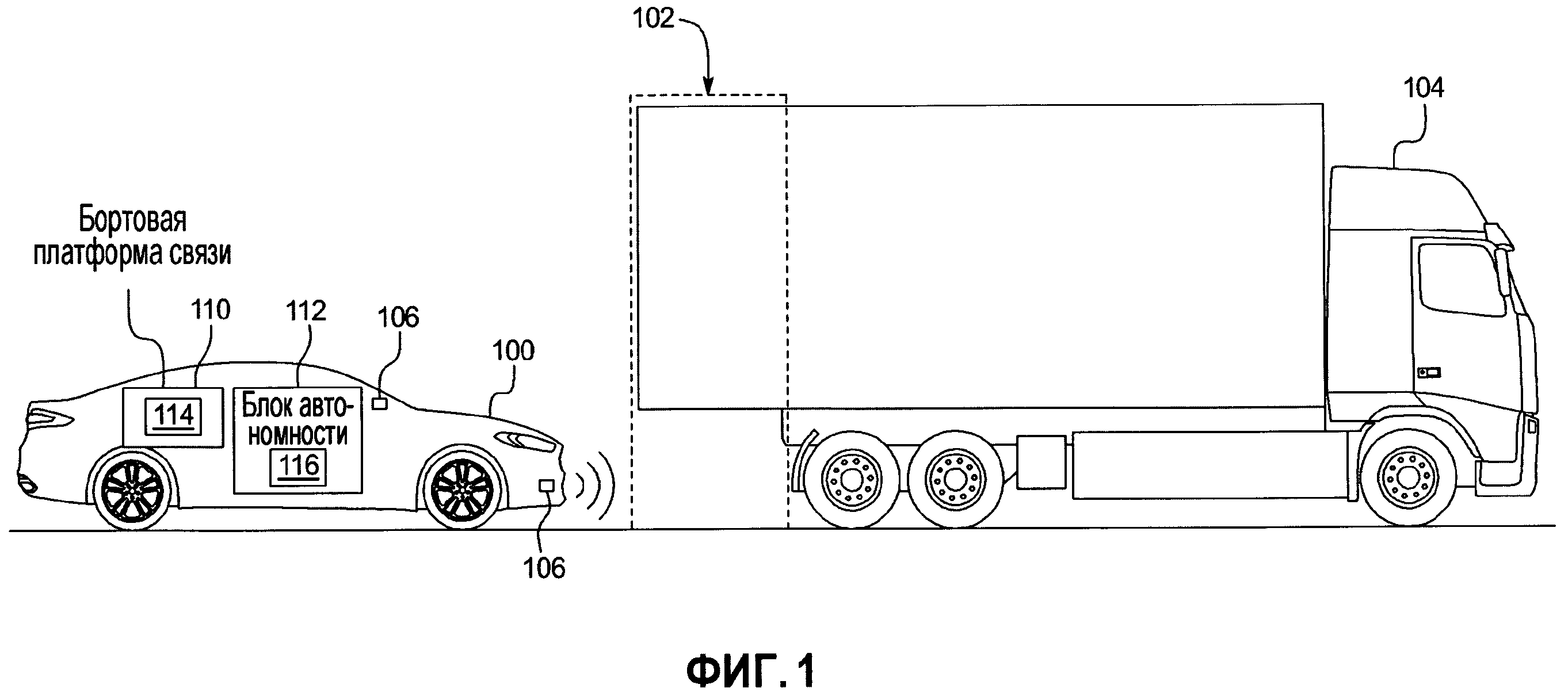
Фиг. 1 и 2 иллюстрируют транспортное средство, выявляющее свес у полуприцепа в соответствии с доктринами данного изобретения.
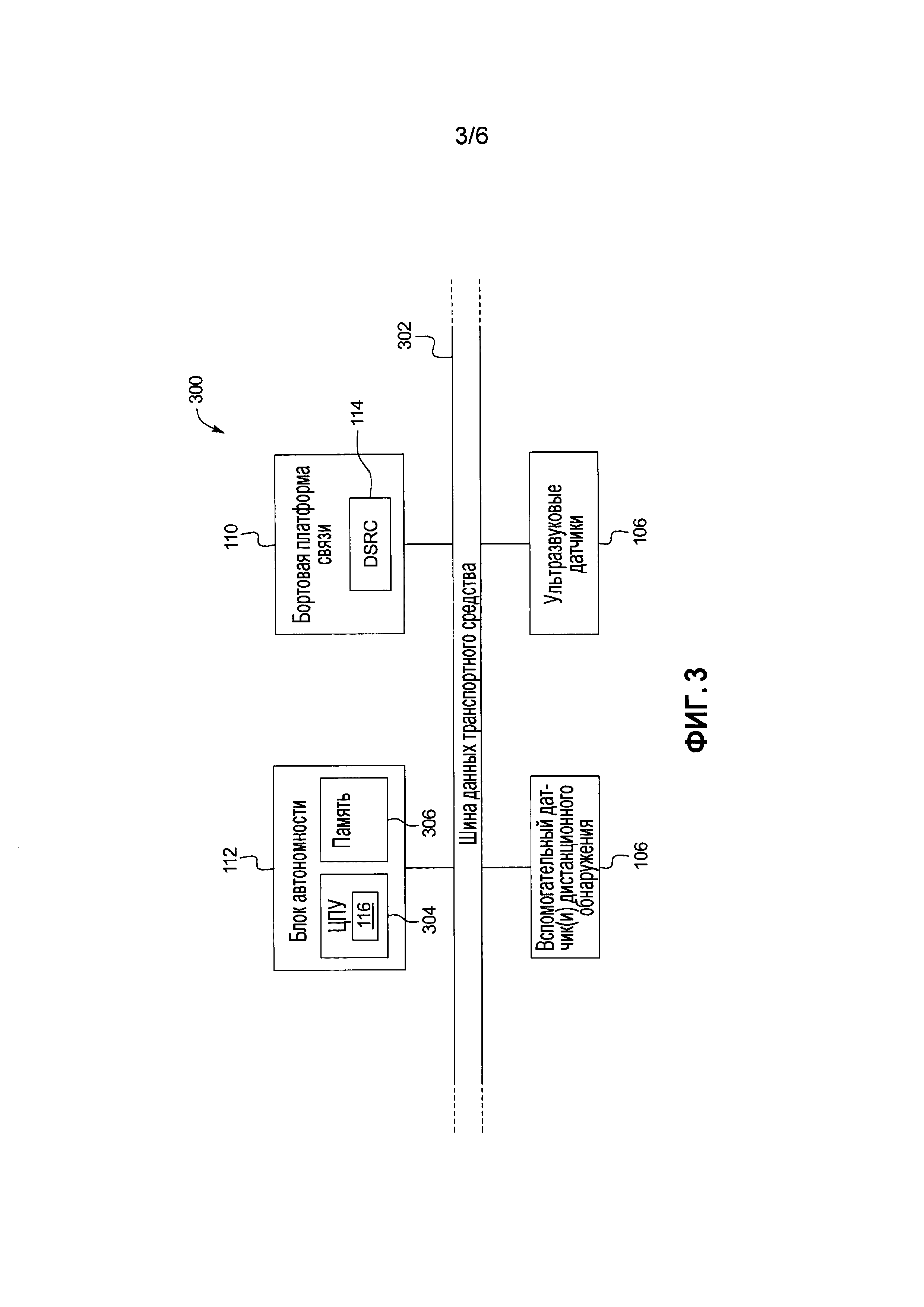
Фиг. 3 - структурная схема электронных компонентов транспортного средства по фиг. 1.
Фиг. 4 и 5 - блок-схемы последовательности операций способов для уведомления других транспортных средств о выявленном свесе у полуприцепа, которые могут быть реализованы электронными компонентами по фиг. 3.
Фиг. 6 - блок-схема последовательности операций способа для определения местонахождения места стоянки, который может быть реализован электронными компонентами по фиг. 3.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Несмотря на то, что изобретение может быть воплощено в различных формах, на чертежах показаны и будут описаны в дальнейшем некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
Все больше и больше производятся транспортные средства с автомномными признаками, которые управляют движущими функциями транспортного средства в некоторых обстоятельствах. Более точно, транспортные средства оснащаются системами активного содействия парковке. Системы активного содействия парковке используют ультразвуковые датчики для определения размеров возможных мест стоянки и определения пути для постановки на стоянку (например, параллельной парковки) транспортного средства на свободное место стоянки. В некоторых транспортных средствах, водитель управляет ускорением и замедлением транспортного средства, а система активного содействия парковке управляет рулевым механизмом транспортного средства вдоль определенному пути. В других транспортных средствах, система активного содействия парковке управляет как ускорением/замедлением, так и рулевым механизмом транспортного средства (иногда указывается ссылкой как «полностью активное содействие парковке»). Автомобили с кузовом седан и SUV среднего размера располагаются гораздо ниже, чем грузовой автомобиль, особенно полуприцепы или грузовые автомобили с безбортовой платформой. Ультразвуковые датчики типично установлены ниже на боковой стороне передней облицовки.
Так как ультразвуковые датчики расположены, чтобы выявлять бордюрные камни и транспортные средства на уровне земли, они выявляют только самую заднюю ось грузового автомобиля. Как результат, ультразвуковые датчики не выявляют прицепы, которые свешиваются на некоторое расстояние от транспортного средства. Свес не предполагается при планировании траектории, и система активного содействия парковке определяет, что место стоянки является большим, чем оно есть на самом деле. Это приводит к плохому планированию траектории и одобрению недопустимых мест стоянки. Например, когда система активного содействия парковке обнаружила параллельное место стоянки, начальный маневр, который уводит транспортное средство в сторону, мог не включать в себя расстояние от задней части прицепа, что может приводить к несоответствующим расчетам траектории и/или даже к авариям.
Как описано ниже, когда транспортное средство становится на стоянку, транспортное средство выявляет свес прицепа с использованием других датчиков транспортного средства, таких как камеры и/или лазерный локатор. Когда обнаружен свес, транспортное средство широковещательно передает сообщение через связь между транспортными средствами, которое включает в себя расположение и размеры свеса, и время. В качестве альтернативы или дополнительно, в некоторых примерах, транспортное средство выгружает расположение и размеры свеса и время в навигационную систему. В качестве используемой в материалах настоящей заявки, навигационная система является приложением, которое выдает навигационную информацию и/или связанные с навигацией признаки и присоединено к удаленному серверу и/или базе данных. Навигационная система, например, может поддерживаться картографической службой (например, Google MapsTM, Waze®, Apple MapsTM, и т. д.) и/или производителем транспортного средства (например, FordPassTM, и т. д.), и т. д. Когда транспортное средство выявляет место стоянки датчиками дистанционного обнаружения, транспортное средство может не включать в себя датчиков для выявления, находится ли какое-нибудь транспортное средство со свесом рядом с местом стоянки. В некоторых примерах, транспортное средство может принимать сообщение о свесе через связь между транспортными средствами. В качестве альтернативы или дополнительно, в таких примерах, транспортное средство может загружать информацию касательно свеса через навигационную систему. Таким образом, транспортные средства, которые могут выявлять свес, могут предоставлять информацию для транспортных средств, которые не могут выявлять свес. С использованием информации касательно свеса, блок содействия парковке сканирует возможное место стоянки для определения его размеров с учетом свеса. Блок содействия парковке затем рассчитывает траекторию для постановки на стоянку транспортного средства на месте стоянки. В полуавтономном транспортном средстве, блок содействия парковке управляет рулевым механизмом транспортного средства вдоль рассчитанной траектории, а водитель управляет ускорением и замедлением транспортного средства. В автономном транспортном средстве, блок содействия парковке управляет как рулевым механизмом, так и ускорением и замедлением транспортного средства.
В некоторых примерах, транспортное средство выявляет свесы, даже когда не вовлечено в постановку на стоянку. В таких примерах, когда транспортное средство едет по дороге рядом с возможными местами стоянки, транспортное средство использует ультразвуковой датчик датчик(и) с камерой/лазерным локатором для выявления мест стоянки и свесов. Когда расположение места стоянки определено, транспортное средство передает сообщение через связь между транспортными средствами и/или выгружает в навигационную систему расположение места стоянки, время и размеры какого-нибудь выявленного свеса.
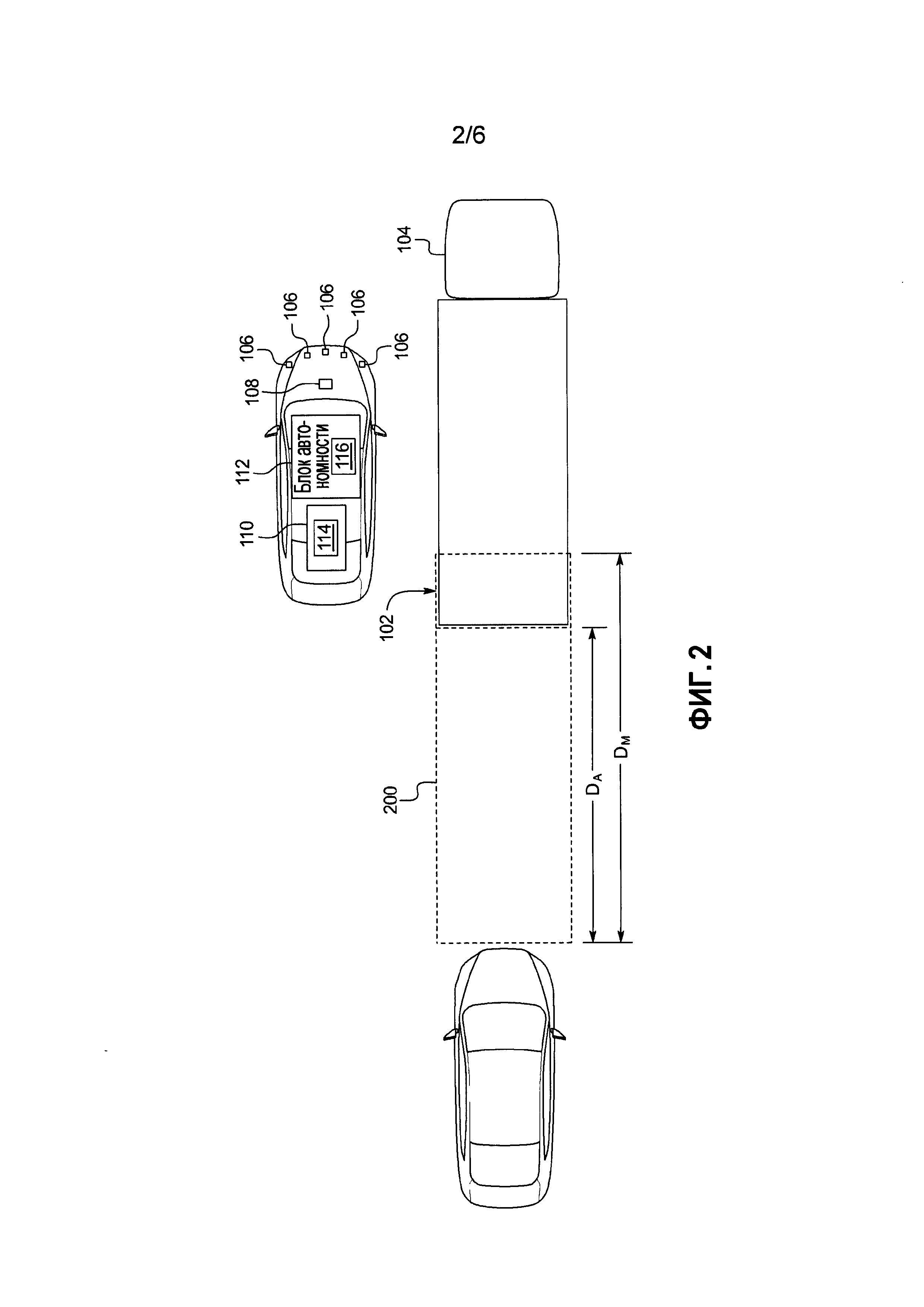
Фиг. 1 и 2 иллюстрируют транспортное средство 100, выявляющее свес 102 у полуприцепа 104 в соответствии с доктринами данного изобретения. Транспортное средство 100 может быть обычным транспортным средством с бензиновым силовым приводом, транспортным средством с гибридным приводом, транспортным средством с электрическим приводом, транспортным средством на топливных элементах и/или любым другим реализующим подвижность типом транспортного средства. Транспортное средство 100 включает в себя части, связанные с подвижностью, такие как силовая передача с двигателем, трансмиссия, подвеска, ведущий вал и/или колеса, и т. д. Транспортное средство 100 может быть полуавтономным (например, с некоторыми типовыми движущими функциями, управляемыми транспортным средством 100) или автономным (например, движущие функции управляются транспортным средством 100 без непосредственного водительского ввода). В проиллюстрированном примере, транспортное средство 100 включает в себя датчики 106 и 108, бортовую платформу 110 связи и блок 112 автономности.
Датчики могут быть скомпонованы в и вокруг транспортного средства 100 любым пригодным образом. Датчики могут быть установлены, чтобы измерять свойства вокруг наружной стороны транспортного средства 100. Дополнительно, некоторые датчики могут быть установлены внутри кабины транспортного средства 100 или в кузове транспортного средства 100 (к примеру, моторном отсеке, нишах для колес, и т. д.) для измерения свойств во внутренней области транспортного средства 100. Например, такие датчики могут включать в себя измерители ускорения, одометры, тахометры, датчики угла продольного наклона и угла рыскания, датчики скорости вращения колес, микрофоны, датчики давления в шинах и биометрические датчики, и т. д. В проиллюстрированном примере, датчики включают в себя ультразвуковые датчики 106 и датчики 108 дистанционного обнаружения.
Ультразвуковые датчики 106 встроены в переднюю часть и заднюю часть транспортного средства 100. В некоторых примерах, ультразвуковые датчики 106 встроены в узлы бампера и/или крылья транспортного средства 100. Ультразвуковые датчики 106 выявляют объекты вокруг транспортного средства 100. Однако, так как зона обнаружения ультразвуковых датчиков 106 относительно узка, объекты над землей, такие как свес 102 полуприцепа 104, могут не выявляться.
Датчики 108 дистанционного обнаружения включают в себя лазерный локатор и/или камеры. Датчики 108 дистанционного обнаружения расположены так, чтобы они находились выше ультразвуковых датчиков 106. Например, датчики 108 дистанционного обнаружения могут быть расположены на приборной панели, зеркале заднего вида и/или крыше транспортного средства 100. Датчики 108 дистанционного обнаружения выявляют объекты вокруг транспортного средства 100. Благодаря распознаванию изображений и/или анализу дальности, датчики 108 дистанционного обнаружения выявляют объекты над землей. В некоторых примерах, комбинация ультразвуковых датчиков 106 и датчики 108 дистанционного обнаружения используются для определения, есть ли транспортное средство 104 со свесом 102. Например, если датчики 108 дистанционного обнаружения выявляют объект на первом расстоянии на высоте пяти футов, а ультразвуковые датчики 106 не выявляют объект на первом расстоянии, может делаться вывод, что есть свес 102. В некоторых примерах, в таком случае, датчик 108 дистанционного обнаружения является камерой, существование свеса 102 выявляется непосредственно с помощью анализа изображений, захваченных камерой.
Бортовая платформа 110 связи включает в себя беспроводные сетевые интерфейсы, чтобы давать возможность связи с внешними сетями. Бортовая платформа 110 связи также включает в себя аппаратные средства (например, процессоры, память, хранилище, антенну, и т. д.) и программное обеспечение для управления беспроводными сетевыми интерфейсами. В проиллюстрированном примере, бортовая платформа 110 связи включает в себя один или более контроллеров связи для основанных на других стандартах сетей (например, глобальной системы мобильной связи (GSM), универсальной системы мобильной связи, (UMTS), долгосрочного развития (LTE), множественного доступа с кодовым разделением каналов (CDMA), WiMAX (IEEE 802.16m); связи через поле в ближней зоне (NFC); локальной беспроводной сети (в том числе, IEEE 802.11 a/b/g/n/ac или других) и Wireless Gigabit (IEEE 802.11ad), и т. д.). Внешняя сеть(и) может быть сетью общего пользования, такой как сеть Интернет; частной сетью, такой как интранет (локальная сеть, использующая технологии Интернет); или их комбинацией, и может использовать многообразие сетевых протоколов, имеющихся в распоряжении в настоящее время или разработанных позже, в том числе, но не в качестве ограничения, основанные на TCP/IP сетевые протоколы. В некоторых примерах, транспортное средство с возможностью обмена информацией присоединяется к навигационной системе через бортовую платформу 110 связи.
В проиллюстрированном примере, бортовая платформа 110 связи включает в себя модуль 114 специализированной связи ближнего действия (DSRC). Примерные модули 114 DSRC включает в себя антенну(ы), радиостанцию(и) и программное обеспечение для широковещательной передачи сообщений и для установления соединений между транспортными средствами, установленными на инфраструктуре модулями (не показаны) и установленными в мобильных устройствах модулями (не показаны). Дополнительная информация о сети DSRC и о том, как сеть может поддерживать связь с аппаратными средствами и программным обеспечением транспортного средства, доступна в отчете по Спецификации системных требований (SyRS) от июня 2011 года центрального аппарата Министерства транспорта США (доступном на http://www.its.dot.gov/meetings/pdf/CoreSystem_SE_SyRS_RevA%20(2011-06-13).pdf), который таким образом включен в состав посредством ссылки во всей своей полноте наряду со всеми документами, упомянутыми на страницах с 11 по 14 отчета SyRS. Системы DSRC могут быть установлены на транспортных средствах и вдоль придорожной полосы на инфраструктуре. Системы DSRC, включающие в себя инфраструктурную информацию, известны как «придорожная» система. DSRC может комбинироваться с другими технологиями, такими как глобальная система определения местоположения (GPS), оптическая видеосвязь (VLC), сотовая связь и радиолокатор ближнего действия, способствующими сообщению транспортными средствами своего положения, скорости, направления движения, относительного положения по отношению к другим объектам, и для обмена информацией с другими транспортными средствами или внешними компьютерными системами. Системы DSRC могут быть объединены с другими системами, такими как мобильные телефоны.
На данный момент, сеть DSRC идентифицирована под аббревиатурой или наименованием DSRC. Однако, иногда используются другие наименования, обычно имеющие отношение к программе обладающего возможностями связи транспортного средства, или тому подобному. Большинство этих систем являются либо чисто DSRC, либо разновидностью стандарта беспроводной связи IEEE 802.11. Однако, кроме системы чисто DSRC, он также подразумевается покрывающим системы специализированной беспроводной связи между легковыми автомобилями и системой придорожной инфраструктуры, которая объединена с GPS и основана на протоколе IEEE 802.11 для локальных сетей беспроводной связи (таком как 802.11p, и т. д.).
Блок 112 автономности управляет автономными признаками транспортного средства 100. Когда транспортное средство 100 является автономным, блок 112 автономности координирует и управляет подсистемами транспортного средства 100, чтобы планировать и отслеживать маршрут движения без водительского ввода. Когда транспортное средство является полуавтономным, блок 112 автономности управляет автономными признаками транспортного средства 100, когда автономные признаки (например, адаптивное автоматическое управление скоростью движения, центрирование в полосе движения, содействие парковке, содействие движение по автомагистрали, и т. д.) вводятся в действие водителем, и удовлетворены необходимые условия для использования признаков. Например, когда транспортное средство 100 является полуавтономным, и активное содействие парковке вводится в действие, блок 112 автономности определяет размеры места стоянки (в том числе, размеры свеса 102), рассчитывает траекторию на место стоянки и управляет рулевым механизмом транспортного средства 100, чтобы ставить транспортное средство 100 на стоянку на месте стоянки, придерживаясь траектории. В проиллюстрированном примере, блок 112 автономности включает в себя блок 116 содействия парковке.
Блок 116 содействия парковке выявляет и выдает информацию касательно свесов 102. Когда транспортное средство 100 становится на стоянку, блок 116 содействия парковке выявляет свес 102 полуприцепа 104 с использованием датчика 106 и 108. Когда выявлен свес 102, блок 116 содействия парковке, с помощью модуля 114 DSRC, широковещательно передает сообщение касательно свеса 102. В качестве альтернативы или дополнительно, в некоторых примерах, блок 116 содействия парковке выдает информацию в навигационную систему, поддерживаемую картографической службой (например, Google MapsTM, Waze®, Apple MapsTM, и т. д.) и/или производителем транспортного средства (например, FordPassTM, и т. д.), и т. д. Информация о свесе 102 включает в себя расположение свеса 102, время, в которое был обнаружен свес 102, и/или размеры свеса 102.
Дополнительно, когда транспортное средство без выявления свеса обнаруживает место стоянки своими ультразвуковыми датчиками 106, транспортное средство может принимать сообщение о свесе через свой модуль 114 DSRC и/или навигационную систему. С использованием информации касательно свеса, блок 116 содействия парковке сканирует возможное место стоянки для определения его размеров с учетом свеса 102. В проиллюстрированном примере по фиг. 2, когда транспортное средство 100, в таком случае, сканирует место 200 стоянки ультразвуковыми датчиками 106, блок 116 содействия парковке определяет измеренный размер (DM). Посредством измерения датчиками 108 дистанционного обнаружения, приема сообщения через модуль 114 DSRC и/или приема информации из навигационной системы, блок 116 содействия парковке определяет реальные размеры (DA) с учетом размеров свеса 102. Блок содействия 116 парковке затем рассчитывает траекторию для постановки на стоянку транспортного средства 100 на месте 200 стоянки. В полуавтономном транспортном средстве, блок 116 содействия парковке управляет рулевым механизмом транспортного средства 100 вдоль рассчитанной траектории, а водитель управляет ускорением и замедлением транспортного средства 100. В автономном транспортном средстве, блок 116 содействия парковке управляет как рулевым механизмом, так и ускорением и замедлением транспортного средства 100.
В некоторых примерах, блок 116 содействия парковке выявляет свес 102, даже когда не приводится в действие при постановке на стоянку. В таких примерах, когда транспортное средство 100 едет по дороге рядом с возможными местами стоянки, блок 116 содействия парковке использует ультразвуковой датчик 106 и датчики 108 дистанционного обнаружения для выявления мест стоянки и свесов. Когда расположение места 200 стоянки определено, блок 116 содействия парковке передает сообщение через модуль 114 DSRC и/или выгружает в навигационную систему расположение места 200 стоянки, время и размеры какого-нибудь выявленного свеса 102.
Фиг. 3 - структурная схема электронных компонентов 300 транспортного средства 100 по фиг. 1. В проиллюстрированном примере, электронные компоненты 300 включают в себя датчики 106 и 108, бортовой модуль 110 связи, блок 112 автономности и шину 302 данных транспортного средства.
Блок 112 автономности включает в себя процессор или контроллер 304 и память 306. В проиллюстрированном примере, блок 112 автономности сконструирован, чтобы включать в себя блок 116 содействия парковке. В качестве альтернативы, в некоторых примерах, блок 116 содействия парковке является отдельным электронным блоком управления (ECU) со своими собственными процессором и памятью. Процессор или контроллер 304 может быть любым пригодным устройством обработки или набором устройств обработки, таких как, но не в качестве ограничения: микропроцессор, основанная на микроконтроллерах платформа, пригодная интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA) и/или одна или более специализированных интегральных схем (ASIC). Памятью 306 может быть энергозависимая память (например, ОЗУ (оперативное запоминающее устройство, RAM), которое может включать в себя энергонезависимое ОЗУ, магнитное ОЗУ, ферроэлектрическое ОЗУ и любые другие пригодные формы); энергонезависимая память (например, дисковая память, флэш-память (FLASH), СППЗУ (стираемые программируемые постоянные запоминающие устройства, EPROM) ЭСППЗУ (электрически стираемые программируемые постоянные запоминающие устройства, EEPROM), основанная на мемристорах энергонезависимая твердотельная память, и т. д.); немодифицируемая память (например, СППЗУ), постоянное запоминающее устройство, и/или запоминающие устройства большой емкости (например, накопители на жестком диске, твердотельные накопители, и т. д.) В некоторых примерах, память 306 включает в себя многочисленные разновидности памяти, в частности, энергозависимую память и энергонезависимую память.
Память 306 является машинно-читаемыми носителями, на которых могут быть воплощены один или более наборов команд, таких как программное обеспечение для приведения в действие способов по настоящему изобретению. Команды 926 могут воплощать один или более способов или логику, как описанные в материалах настоящей заявки. В конкретном варианте осуществления, команды могут находиться полностью или по меньшей мере частично в пределах любых одной или более из памяти 306, машинно-читаемого носителя и/или в пределах процессора 304 во время выполнения команд.
Термины «постоянный машинно-читаемый носитель» и «материальный машинно-читаемый носитель» включают в себя одиночный носитель или множественные носители, такие как централизованная или распределенная база данных и/или связанные устройства кэш-памяти и серверы, которые хранят один или более наборов команд. Термины «постоянный машинно-читаемый носитель» и «материальный машинно-читаемый носитель» также включают в себя любой материальный носитель, который способен хранить, кодировать или переносить набор команд для выполнения процессором, или который побуждает систему выполнять любой один или более из способов или операций, раскрытых в материалах настоящей заявки. В качестве используемого в материалах настоящей заявки, термин «материальный машинно-читаемый носитель» ясно определен включающим в себя любой тип машинно-читаемого запоминающего устройства и/или запоминающего диска для исключения распространяющихся сигналов.
Шина 302 данных транспортного средства с возможностью обмена информацией присоединяется к датчикам 106 и 108, бортовому модулю 110 связи и блоку 112 автономности. В некоторых примерах, шина 302 данных транспортного средства включает в себя одну или более шин данных. Шина 302 данных транспортного средства может быть реализована в соответствии с протоколом шины локальной сети контроллеров (CAN), как определено стандартом 11898-1 Международной организации по стандартизации (ISO), протоколом шины транспортировки данных мультимедийных систем (MOST), протоколом шины многофункциональных данных CAN (CAN-FD) (ISO 11898-7) и протоколом шины К-line (ISO 9141 и ISO 14230-1), и/или протоколом шины Ethernet™ IEEE 802.3 (начиная с 2002 года), и т. д.
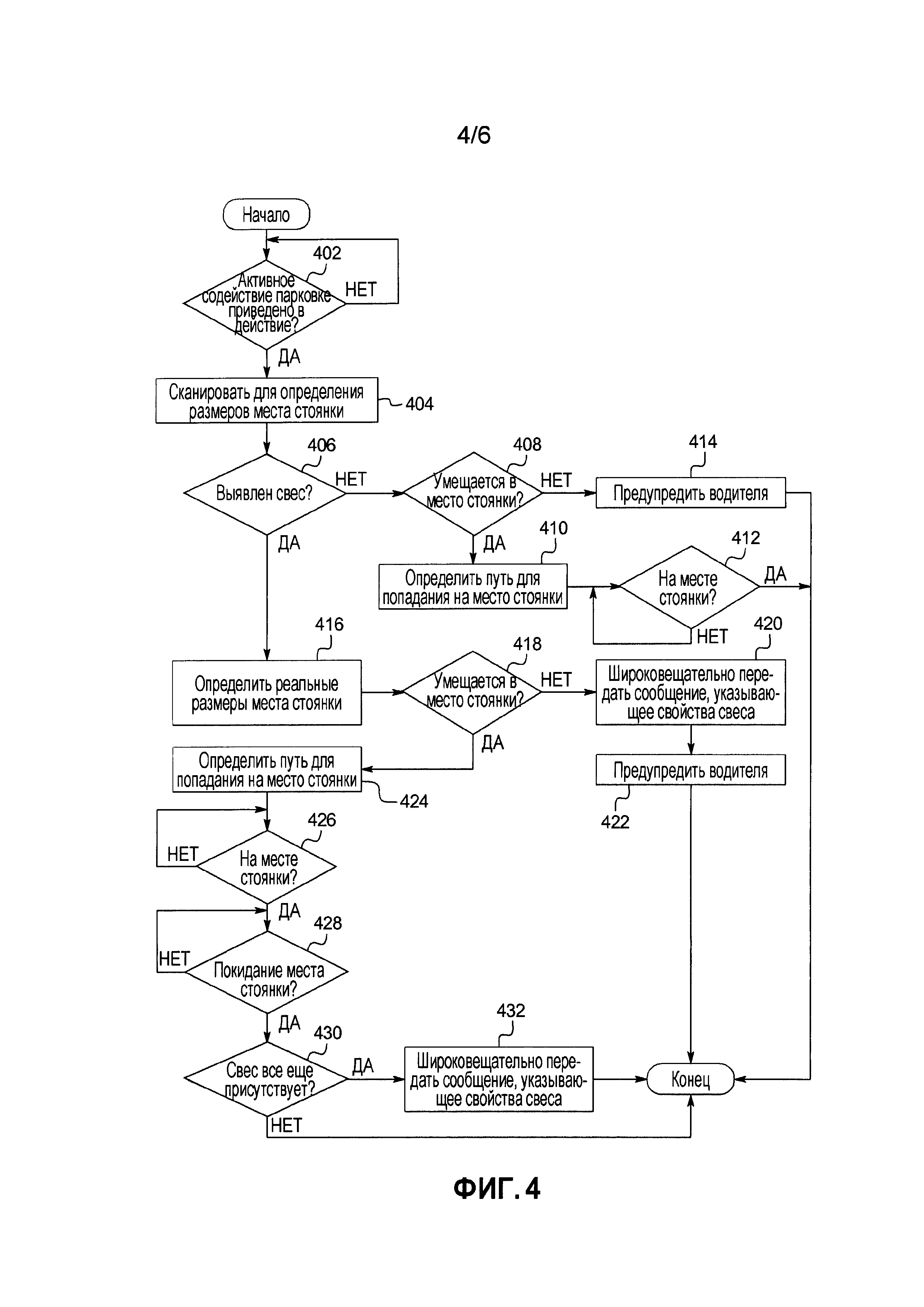
Фиг. 4 - блок-схема последовательности операций способа для уведомления других транспортных средств о выявленном свесе 102 у полуприцепа 104, который может быть реализован электронными компонентами 300 по фиг. 3. В начале, на вершине 402 блок-схемы, блок 116 содействия парковке ожидает до тех пор, пока не приведено в действие активное содействие парковке блока. На вершине 404 блок-схемы, блок 116 содействия парковке сканирует возможное место стоянки (например, место 200 стоянки по фиг. 2), чтобы определить его размеры. На вершине 406 блок-схемы, блок 116 содействия парковке определяет, выявлен ли свес 102. Блок 116 содействия парковке выявляет свесы 102 с использованием ультразвуковых датчиков 106 и датчиков 108 дистанционного обнаружения, чтобы характеризовать место 200 стоянки на разных высотах. Когда свес 102 не выявлен, способ продолжается на вершине 408 блок-схемы. Иначе, когда свес 102 выявлен, способ продолжается на вершине 416 блок-схемы.
На вершине 408 блок-схемы, блок 116 содействия парковке определяет, умещается ли транспортное средство 100 в пределах места 200 стоянки. Когда транспортное средство 100 умещается в пределах места 200 стоянки, способ продолжается на вершине 410 блок-схемы. Когда транспортное средство 100 не умещается в пределах места 200 стоянки, способ продолжается на вершине 414 блок-схемы. На вершине 410 блок-схемы, блок 116 содействия парковке определяет траекторию на место 200 стоянки. На вершине 412 блок-схемы, блок 116 содействия парковке ожидает до тех пор, пока транспортное средство 100 не поставлено на стоянку на месте 200 стоянки. На вершине 414 блок-схемы, блок 116 содействия парковке предупреждает водителя (например, с помощью индикаторной лампы на устройстве отображения приборной панели и/или сообщения на устройстве отображения центральной консоли, и т. д.).
На вершине 416 блок-схемы, блок 116 содействия парковке определяет реальные размеры (DA) места 200 стоянки. В некоторых примерах, для определения реальных размеров (DA), блок 116 содействия парковке вычитает размеры свеса 102 из измеренного размера (DM) места 200 стоянки. На вершине 418 блок-схемы, блок 116 содействия парковке определяет, умещается ли транспортное средство 100 в пределах места 200 стоянки. Когда транспортное средство 100 умещается в пределах места 200 стоянки, способ продолжается на вершине 424 блок-схемы. Когда транспортное средство 100 не умещается в пределах места 200 стоянки, способ продолжается на вершине 420 блок-схемы.
На вершине 420 блок-схемы, блок 116 содействия парковке широковещательно передает сообщение со свойствами свеса 102 через модуль 114 DSRC. В качестве альтернативы или дополнительно, в некоторых примерах, блок 116 содействия парковке снабжает навигационную систему свойствами свеса 102. На вершине 422 блок-схемы, блок 116 содействия парковке предупреждает водителя (например, с помощью индикаторной лампы на устройстве отображения приборной панели и/или сообщения на устройстве отображения центральной консоли, и т. д.).
На вершине 424 блок-схемы, блок 116 содействия парковке определяет траекторию на место 200 стоянки. На вершине 426 блок-схемы, блок 116 содействия парковке ожидает до тех пор, пока транспортное средство 100 не поставлено на стоянку на месте 200 стоянки. На вершине 428 блок-схемы, блок 116 содействия парковке ожидает до тех пор, пока транспортное средство 100 не покидает место 200 стоянки. На вершине 430 блок-схемы, блок 116 содействия парковке определяет, по-прежнему ли присутствует свес 102. На вершине 432 блок-схемы, когда свес 102 все еще присутствует, блок 116 содействия парковке широковещательно передает сообщение со свойствами свеса 102 через модуль 114 DSRC. В качестве альтернативы или дополнительно, в некоторых примерах, блок 116 содействия парковке снабжает навигационную систему свойствами свеса 102.
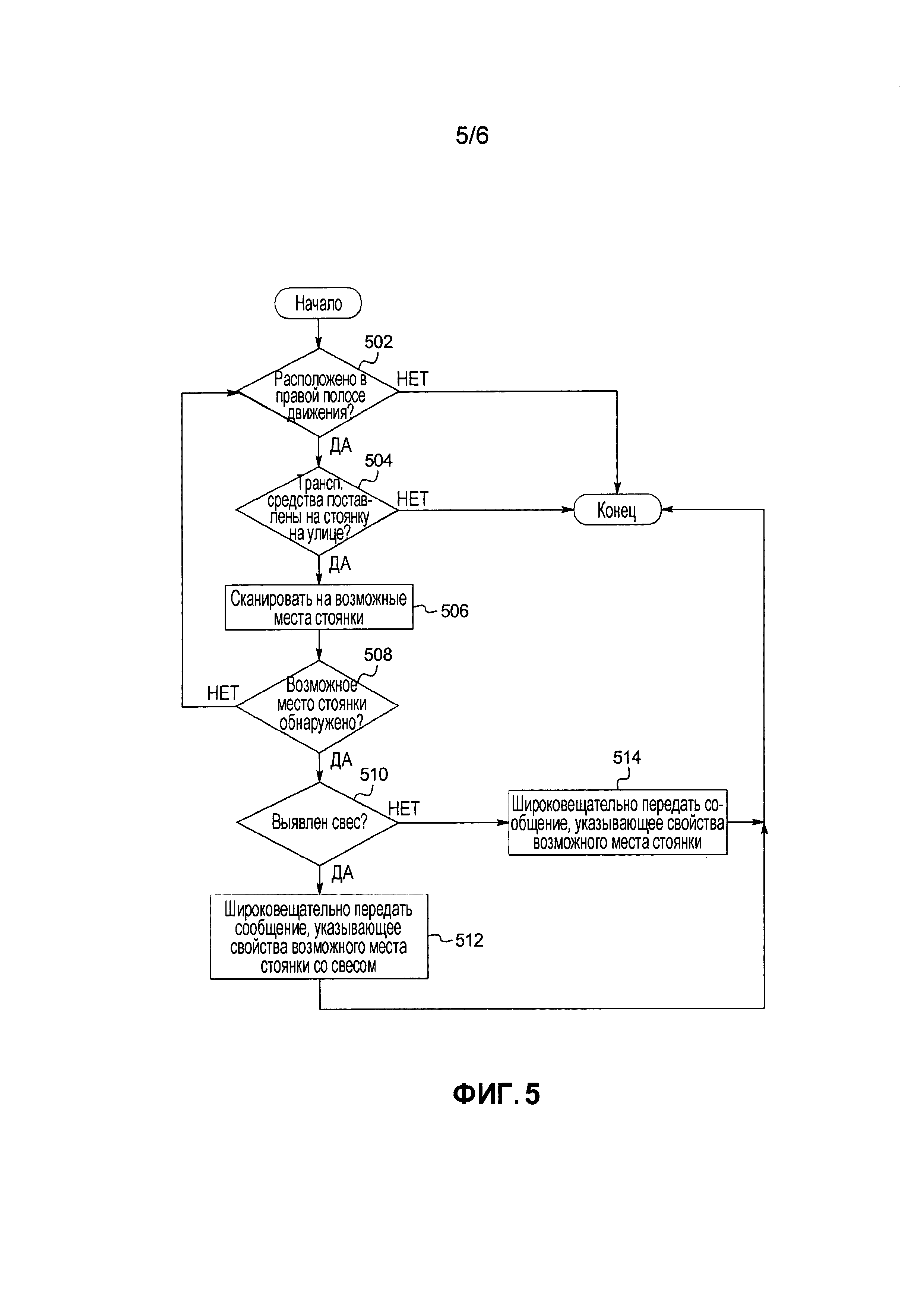
Фиг. 5 - блок-схема последовательности операций способа для уведомления других транспортных средств о выявленном свесе 102 у полуприцепа 104, который может быть реализован электронными компонентами 300 по фиг. 3. В начале, на вершине 502 блок-схемы, блок 116 содействия парковке определяет, расположено ли транспортное средство 100 в правой полосе движения. В некоторых примерах, блок 116 содействия парковке определяет, что он находится в правой полосе движения, с помощью навигационной системы и/или данных перспективы, предоставленных усовершенствованной системой содействия вождению (ADASIS). Дополнительная информация касательно реализации и информация, предусмотренная ADASIS, имеется в распоряжении в «ADAS Protocol for Advanced In-Vehicle Applications» («Протокол ADAS для усовершенствованных установленных в транспортном средстве приложений») (доступной на http://durekovic.com/publications/documents/ADASISv2%20ITS%20NY%20Paper%20Final.pdf), которая настоящим включена в состав посредством ссылки во всей своей полноте. На вершине 504 блок-схемы, блок 116 содействия парковке определяет, поставлены ли другие транспортные средства на стоянку вдоль улицы по правую сторону от транспортного средства 100. В некоторых примерах, блок 116 содействия парковке использует датчики 106 и 108 для выявления поставленных на стоянку транспортных средств. В качестве альтернативы или дополнительно, в некоторых примерах, блок 116 содействия парковке принимает информацию касательно уличной стоянки из навигационной системы. На вершине 506 блок-схемы, когда другие транспортные средства поставлены на стоянку вдоль улицы по правую сторону от транспортного средства 100, и/или когда навигационная система указывает, что есть действующая уличная стоянка, блок 116 содействия парковке приводит в действие датчики 106 и 108 для сканирования возможных мест стоянки.
На вершине 508 блок-схемы, блок 116 содействия парковке определяет, было ли обнаружено возможное место стоянки. Когда возможное место стоянки было обнаружено, способ продолжается на вершине 510 блок-схемы. Иначе, когда возможное место стоянки не было обнаружено, способ возвращается на вершину 502 блок-схемы. На вершине 510 блок-схемы, блок 116 содействия парковке определяет, включает ли в себя возможное место стоянки свес 102. Когда возможное место стоянки включает в себя свес 102, способ продолжается на вершине 512 блок-схемы. Иначе, когда возможное место стоянки не включает в себя свес 102, способ продолжается на вершине 514 блок-схемы. На вершине 512 блок-схемы, блок 116 содействия парковке широковещательно передает сообщение, указывающее свойства места стоянки, а также свойства свеса 102, через модуль 114 DSRC. В качестве альтернативы или дополнительно, блок 116 содействия парковке выдает свойства места стоянки и свеса 102 в навигационную систему. На вершине 514 блок-схемы, блок 116 содействия парковке широковещательно передает сообщение, указывающее свойства места стоянки, через модуль 114 DSRC. В качестве альтернативы или дополнительно, блок 116 содействия парковке выдает свойства места стоянки в навигационную систему.
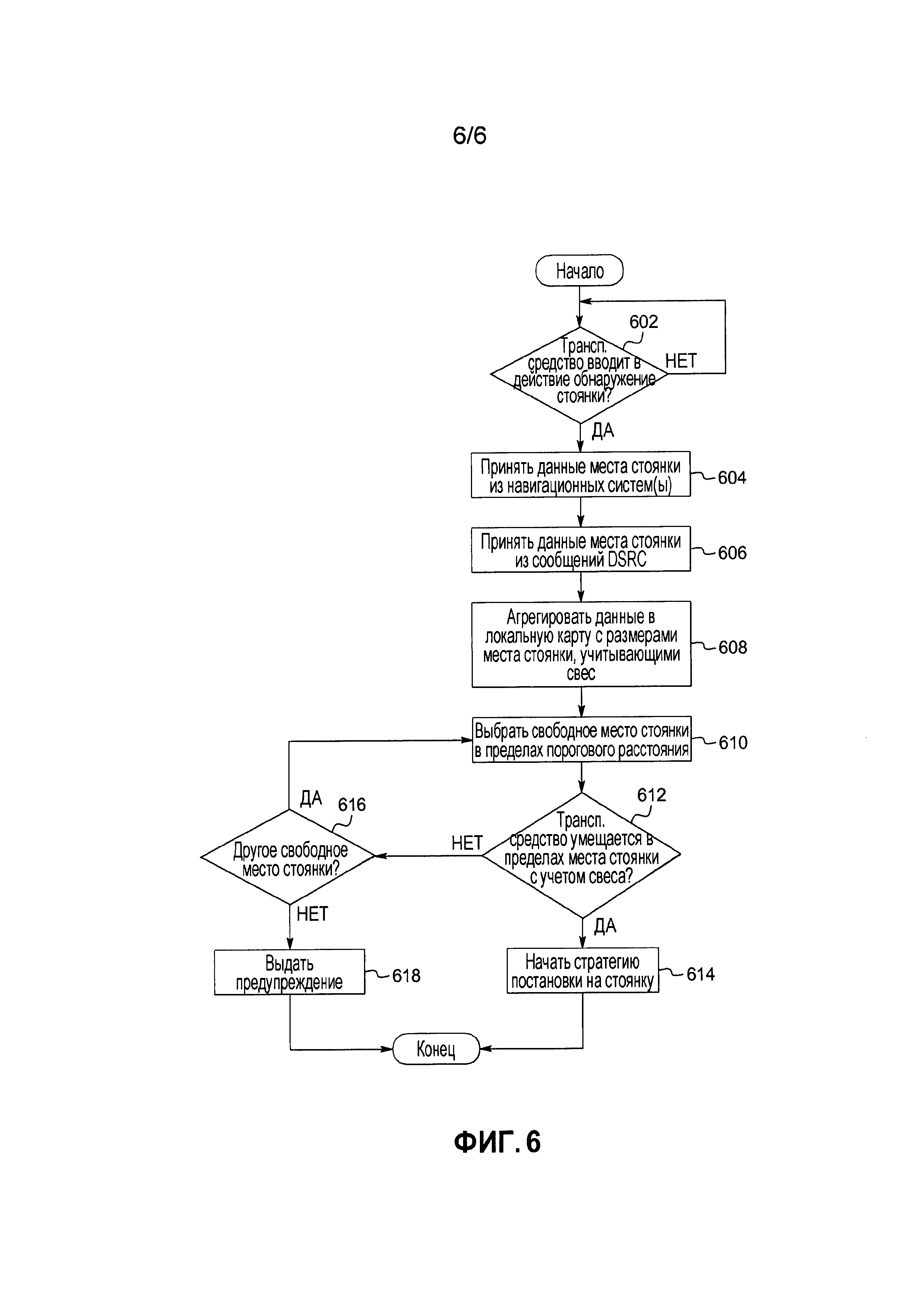
Фиг. 6 - блок-схема последовательности операций способа для определения местонахождения места стоянки, который может быть реализован электронными компонентами по фиг. 3. В начале, на вершине 602 блок-схемы, блок 116 содействия парковке ожидает до тех пор, пока водитель не вводит в действие обнаружение стоянки. На вершине 604 блок-схемы, после того, как водитель вводит в действие обнаружение стоянки, блок 116 содействия парковке принимает данные места стоянки (например, расположение, размеры, наличие свеса, и т. д.) из навигационной системы. На вершине 606 блок-схемы, блок 116 содействия парковке принимает данные места стоянки (например, расположение, размеры, наличие свеса, время, и т. д.) из сообщений, принятых через модуль 114 DSRC. На вершине 608 блок-схемы, блок 116 содействия парковке агрегирует данные места стоянки в локальную карту с размерами места стоянки, учитывающими свес. Например, блок 116 содействия парковке может составлять список возможных мест стоянки в пределах мили от транспортного средства 100, которые были сообщены в течение последних тридцати минут.
На вершине 610 блок-схемы, блок 116 содействия парковке выбирает одно из возможных мест стоянки. В некоторых примерах, возможное место стоянки выбирается по расстоянию (например, ближайшему, и т. д.) и/или по времени сообщения (например, самому последнему, и т. д.). На вершине 612 блок-схемы, блок 116 содействия парковке определяет, умещается ли транспортное средство 100 в пределах возможного места стоянки, выбранного на вершине 610 блок-схемы, с учетом размеров какого-нибудь выявленного свеса. Когда транспортное средство 100 умещается в пределах возможного места стоянки, способ продолжается на вершине 614 блок-схемы. Иначе, когда транспортное средство 100 не умещается в пределах возможного места стоянки, способ продолжается на вершине 616 блок-схемы. На вершине 614 блок-схемы, блок 116 содействия парковке начинает стратегию постановки на стоянку. Например, блок 116 содействия парковке может направлять водителя на выбранное место стоянки, измерять размеры места стоянки для подтверждения его размера, рассчитывать траекторию на место стоянки и управлять направлением движения транспортного средства 100 на место стоянки. На вершине 616 блок-схемы, блок 116 содействия парковке определяет, есть ли другое возможное место стоянки. Если другое возможное место стоянки есть, способ возвращается на вершину 610 блок-схемы. Иначе, если другого возможного места стоянки нет, способ продолжается на вершине 618 блок-схемы. На вершине 618 блок-схемы, блок 116 содействия парковке выдает предупреждение водителю (например, с помощью индикатора на устройстве отображения приборной панели, сообщения на устройстве отображения центральной консоли, и т. д.).
Блок-схемы последовательности операций способа по фиг. 4, 5 и 6 являются представляющими машинно-читаемые команды, хранимые в памяти (такой как память 306 по фиг. 3), которые содержат одну или более программ, которые, когда приводятся в исполнение процессором (таким как процессор 304 по фиг. 3), побуждают транспортное средство 100 реализовывать примерный блок 116 содействия парковке по фиг. 1, 2 и 3. Кроме того, хотя примерная программа(ы) описана со ссылкой на блок-схемы последовательности операций способа, проиллюстрированные на фиг. 4, 5 и 6, многие другие способы реализации примерного блока 116 содействия парковке могут использоваться в качестве альтернативы. Например, порядок приведения в исполнение вершин блок-схемы может быть изменен, и/или некоторые из описанных вершин блок-схемы могут быть изменены, исключены или объединены.
В этой заявке подразумевается, что использование дизъюнктивных суждений должно включать в себя конъюнктивное суждение. Использование формы единственного числа не подразумевается указывающим мощность множества. В частности, подразумевается, что ссылка на определенный объект или неопределенный объект также должна обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, вместо взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать включающим в себя «и/или». Термины «включает в себя», «включающий в себя» и «включают в себя» являются инклюзивными и имеют тот же самый объем, что и «содержит», «содержащий» и «содержат», соответственно.
Описанные выше варианты осуществления и, в частности, любые «предпочтительные» варианты осуществления, являются возможными примерами реализаций и изложены всего лишь для ясного понимания принципов изобретения. Многие изменения и модификации могут быть произведены в отношении описанных выше вариантов(а) осуществления, по существу не отходя от сущности и принципов технологий, описанных в материалах настоящей заявки. Все модификации подразумеваются включенными в материалы настоящей заявки в объеме данного изобретения и защищенными нижеследующей формулой изобретения.
Устройство и способ бортовой диагностики для моторного транспортного средства
Способ диагностики системы охлаждения транспортного средства (варианты) и транспортное средство
Автомобильная дверь (варианты)
Вставка приборной панели
Способ для двигателя
Способ подачи разрежения в двигатель (варианты), двигатель и способ для двигателя
Способ приведения в действие двигателя, топливная система и способ впрыска топлива в двигатель
Способ снижения выбросов транспортного средства (варианты) и система снижения выбросов транспортного средства
Способ приведения в действие двигателя с наддувом (варианты) и система двигателя
Контур охлаждающей жидкости
Способ (варианты) и система для регулирования подачи топлива в двигатель и крутящего момента
Способ управления силовой установкой гибридного транспортного средства (варианты) и силовая установка гибридного транспортного средства
Способ (варианты) и система регулирования мощности нагрева кислородного датчика для уменьшения его деградации под действием воды
Способ (варианты) и система контроля преждевременного зажигания
Управление работой двигателя при холодном пуске
Способ (варианты) управления системой гибридного транспортного средства и система гибридного транспортного средства
Способ (варианты) и система для управления впрыском воды
Способ (варианты) и система для регулирования впрыска воды в двигатель
Способ и система для управления двигателем
Способ и система для управления двигателем

