Результат интеллектуальной деятельности: Способ прицеливания при сбросе грузов в точку земной поверхности с маневрирующего летательного аппарата
Вид РИД
Изобретение
Изобретение относится к способам прицеливания и позволяет выполнять сброс грузов с пространственного маневра.
Известен способ прицеливания при сбросе грузов в точку земной поверхности с маневрирующего летательного аппарата (патент РФ 2295104 от 23.03.2006), заключающийся в том, что измеряют текущие значения фазовых координат летательного аппарата, цели и ветра, решают задачу баллистики сбрасываемого груза, решают задачу прогнозирования фазовых координат движения маневрирующего летательного аппарата, формируют сигнал координат поверхности точек сбрасывания, обеспечивающий попадание в цель, определяют плоскость маневра и формируют сигнал координат траектории выведения летательного аппарата из текущего положения на поверхность точек сбрасывания, формируют директорные сигналы текущих перегрузки и крена и заданных перегрузки и крена, необходимых для полета по траектории выведения, формируют временной интервал до сброса, выделяют сигнал рассогласования между положениями прогнозируемой и заданной точки сброса, корректируют сигналы координат поверхности точек сбрасывания, траектории выведения и увода сигналом рассогласования до заданной величины, по достижении директорными сигналами заданных перегрузки, крена или времени, оставшегося до сброса, управляют наведением летательного аппарата, совмещая директорные сигналы заданной и текущей перегрузки и заданного и текущего крена.
Данный способ формирует траекторию наведения, которая представляет собой дугу окружности в «плоскости маневра». В общем случае наклон плоскости маневра может быть существенным, вплоть до 90°. При полете по такой траектории параметры маневра (перегрузка, крен, тангаж) могут динамично изменяться, что затрудняет их точную отработку как в директорном, так и в автоматическом режиме. Это в свою очередь увеличивает промахи при сбрасывании груза.
Технический результат, достигаемый изобретением, заключается в повышении точности доставки грузов с криволинейных траекторий.
Указанный результат достигается путем выведения носителя из произвольного положения на траекторию в виде винтовой линии, полет по которой выполняется с постоянной скоростью, перегрузкой, креном и тангажом.
Для этого измеряют текущее значение геометрической высоты относительно точки земной поверхности. Причем эта точка (наземная цель) не обязательно должна быть наблюдаемой. Сигналы координат цели могут быть получены различными способами, например, при доставке груза в оперативно обнаруженную цель: формированием визуального изображения участка поверхности с расположенной на нем целью, формированием изображения подвижной марки и совмещением его с изображением цели с запоминанием сигналов координат цели в момент совмещения. При доставке груза в заранее обнаруженную цель возможен также другой способ: ввод координат цели во время предполетной подготовки. Кроме того, измеряют барометрическую высоту, углы атаки, скольжения, курса, тангажа, крена, сноса, воздушную и путевую скорости, координаты летательного аппарата, решают задачу прогнозирования фазовых координат движения маневрирующего летательного аппарата.
Затем для текущих значений скорости и угла наклона траектории определяют минимальную безопасную высоту точки сбрасывания, на которой обеспечивается увод носителя от встречи с землей и осколками собственного груза. Для этой высоты и текущих значений скорости и угла наклона траектории решают задачу баллистики сбрасываемого груза и формируют сигнал координат окружности точек сбрасывания, обеспечивающих попадание в цель. После этого формируют сигнал координат поверхности цилиндра, пересекающей окружность точек сбрасывания и содержащей точку текущего положения и прогнозируемую траекторию движения маневрирующего летательного аппарата. Для полета по траектории выведения формируют директорные сигналы заданных и текущих значений перегрузки и крена, а также временной интервал до сброса. Одновременно выделяют сигнал рассогласования между текущим положением и прогнозируемой траекторией движения маневрирующего летательного аппарата. Этим сигналом корректируют сигналы заданной перегрузки и заданного крена для выхода на траекторию выведения. При сближении с целью после достижения директорными сигналами заданных значений перегрузки, крена или времени, оставшегося до сбрасывания, управляют наведением летательного аппарата, совмещая директорные сигналы заданной и текущей перегрузки, а также заданного и текущего крена.
Сущность предлагаемого способа поясняется чертежами.
На фиг. 1 даны геометрические построения вертикальной составляющей траектории выведения.
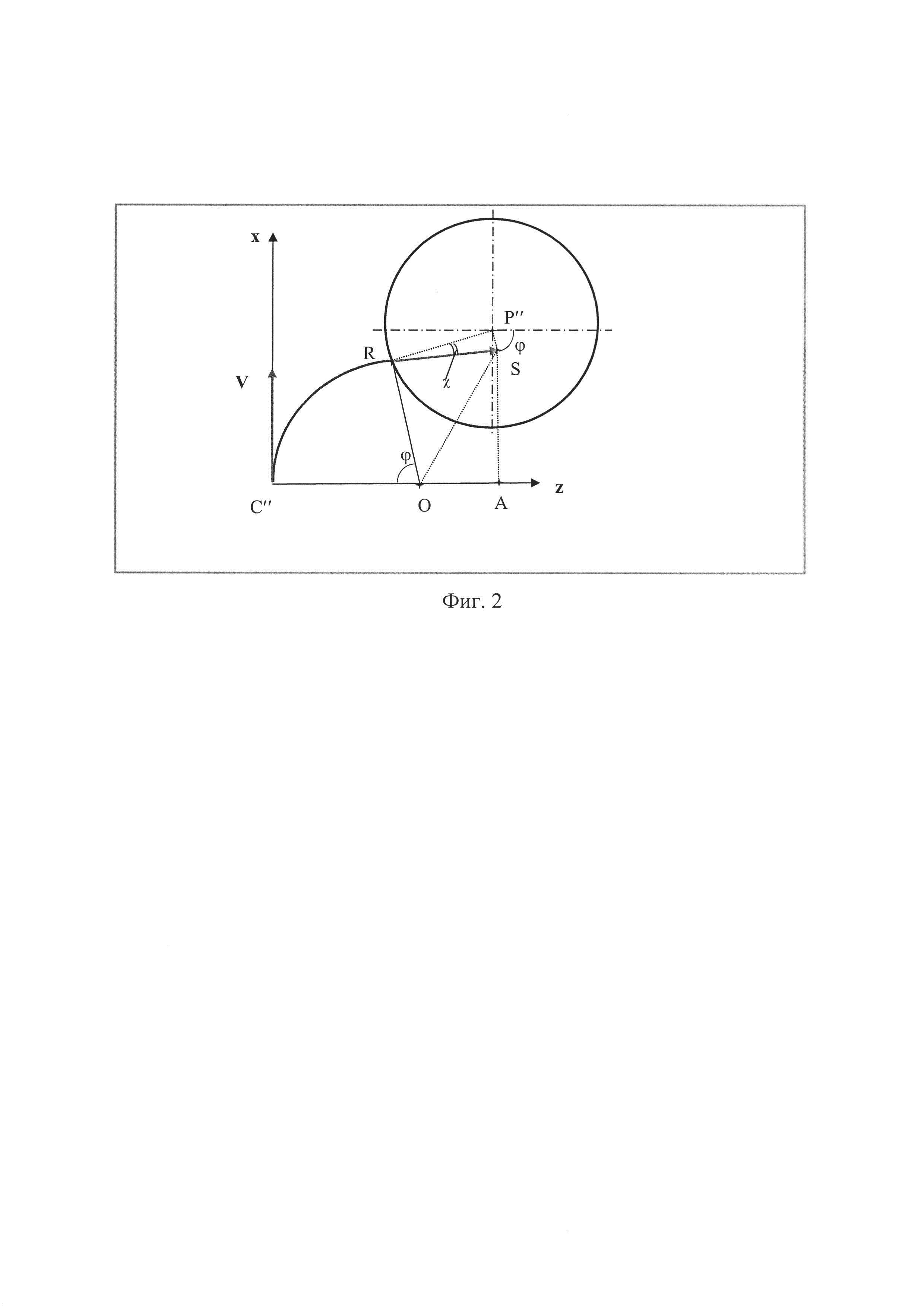
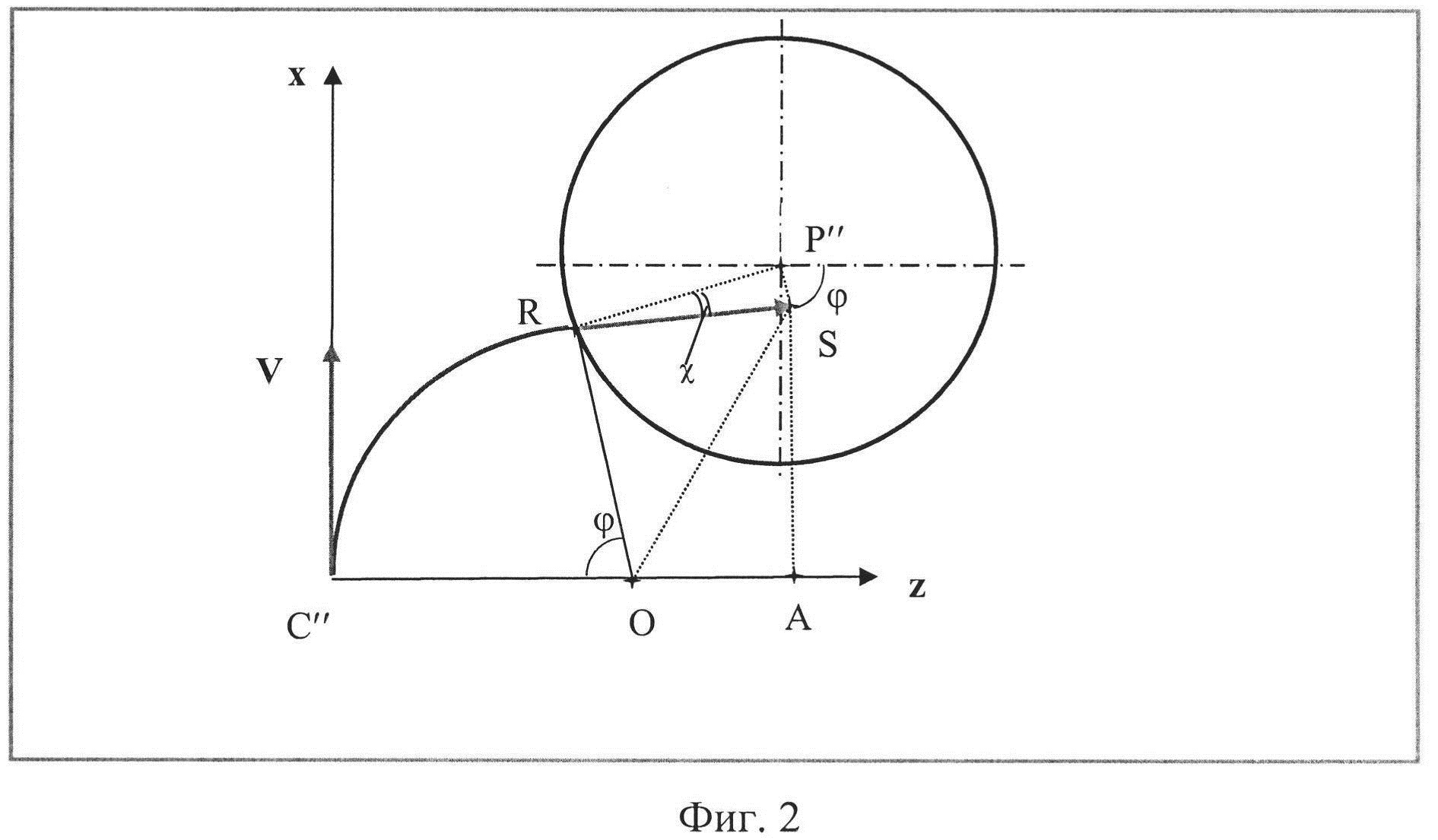
На фиг. 2 даны геометрические построения траектории выведения в горизонтальной плоскости.
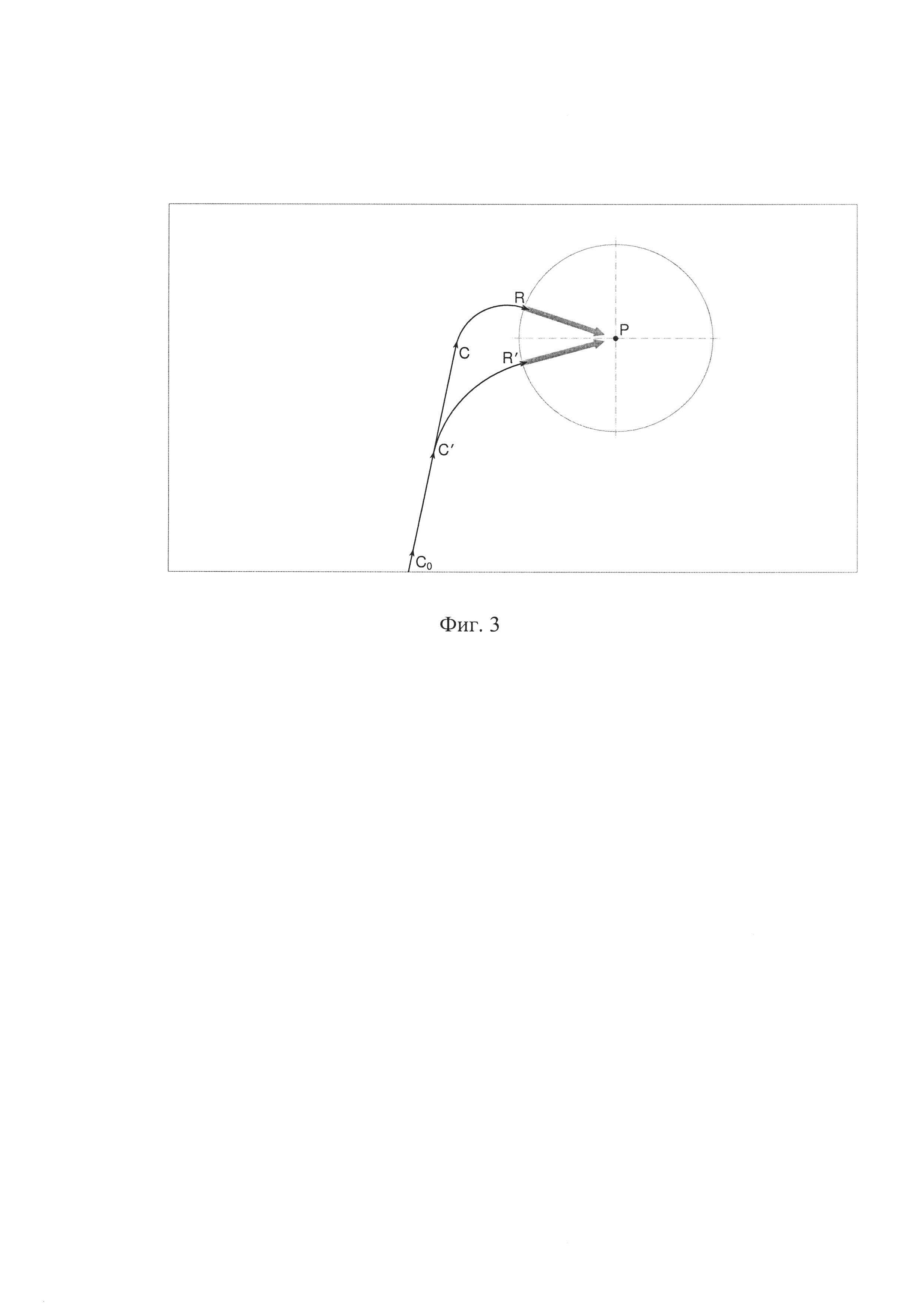
На фиг. 3 показаны итерации построения траектории выведения в горизонтальной плоскости.
В соответствии с предлагаемым способом прицеливание и сбрасывание груза выполняется следующим образом.
При наземной подготовке или в полете определяют координаты цели. В процессе полета измеряют текущие значения геометрической высоты относительно цели, барометрической высоты, углов атаки, скольжения, курса, тангажа, крена, сноса, воздушной и путевой скоростей, координаты летательного аппарата. Затем для текущих значений скорости V и угла наклона траектории θ определяют минимальную высоту точки сбрасывания HR, на которой обеспечивается увод носителя от встречи с землей и осколками собственного груза на минимальную безопасную высоту Hmin:
HR=Hmin-h-Vτsinθ,
где τ - время возможного запаздывания летчика в начале выведения самолета из пикирования, h=h(V,θ)<0 - «просадка» по высоте при уводе по дуге окружности в вертикальной плоскости.
Для высоты HR и текущих значений скорости V и угла наклона траектории θ определяют баллистические параметры: штилевой относ A0R и время падения груза TR.
Далее прогнозируют координаты цели хр, zp на момент падения груза:
xP=xц+Vцx(Тост+TR),
zP=zц+Vцz(Тост+TR),
где хц, zц - текущие координаты цели, Тост - время, оставшееся до выхода в точку сбрасывания, Vцx и Vцz - составляющие скорости цели относительно атмосферы, учитывающие ветер и, если бортовыми средствами сопровождается движущаяся цель, то и движение цели относительно поверхности.
По прогнозируемым координатам цели определяют сигнал координат окружности радиуса A0R в горизонтальной плоскости, расположенной на высоте HR, на которую необходимо вывести носитель для точного попадания в цель.
Построение вертикальной и горизонтальной составляющих траектории наведения иллюстрируют фиг. 1 и фиг. 2 соответственно, где изображено:
С - текущее положение летательного аппарата;
С' - положение летательного аппарата, необходимое для полета по траектории наведения;
С'' - проекция текущего положения летательного аппарата на горизонтальную плоскость, расположенную на высоте HR;
R - точка сбрасывания;
Р - точка падения груза;
Р'' - центр окружности точек сбрасывания, обеспечивающих попадание в цель;
О - проекция на горизонтальную плоскость оси цилиндра вращения, поверхности которого принадлежит траектория наведения.
После получения сигнала координат окружности точек сбрасывания формируют сигнал координат поверхности цилиндра, пересекающего окружность точек сбрасывания и содержащего точку текущего положения и прогнозируемую траекторию движения маневрирующего летательного аппарата. Это может быть реализовано, например, следующим образом.
Для попадания в цель горизонтальная составляющая начальной скорости груза должна быть направлена по радиусу окружности RP''. При сбрасывании груза с толкателем горизонтальная составляющая скорости носителя (вектор RS) отклонена от радиуса RP'' на некоторый угол χ.
Задачу определения параметров траектории выведения в горизонтальной плоскости будем решать в скоростной «горизонтированной» системе координат (СГСК). Ось X СГСК направлена по вектору скорости V, ось Y направлена по вертикали, а ось Z образует с X и Y правую тройку.
Определяя длину отрезка OS из треугольника AOS и треугольника ROS, получим уравнение:

откуда можно найти радиус цилиндра:
где xS и zS - координаты точки S в СГСК, которые определяются через координаты цели хР и zP, прогнозируемые на момент падения груза:
xS=хР-A0R sin χ sinϕ,
zS=zP+A0R sin χ cosϕ.
Координаты точки сбрасывания XR и ZR в СГСК определяют из соотношений:
Затем вычисляют ϕ - угол поворота на точку сбрасывания (см. фиг. 2), уточняют время Тост, оставшееся до выхода в точку сбрасывания и выделяют сигнал рассогласования ΔН (см. фиг. 1) между текущим положением и прогнозируемой траекторией движения маневрирующего летательного аппарата:
ΔH=yц+HR-R0ϕtgθ.
Согласно предлагаемому способу индицируют директорные сигналы текущих значений перегрузки и крена. Кроме того, для полета по траектории выведения формируют и индицируют директорные сигналы заданных значений перегрузки и крена, а также времени, оставшегося до сбрасывания, величины которых однозначно определяются траекторией выведения и скоростью полета.
Сигналы заданных значений перегрузки и крена формируют следующим образом.
Зная координаты точки R и текущий угол θ, построим на развертке цилиндра винтовую линию. Естественно, она не обязательно пройдет через точку С, а может пройти выше или ниже (точка С' на фиг. 1). В качестве управления носителем для полета по траектории C'R будем рассматривать вектор нормальной перегрузки. Тогда нормальная составляющая вертикальной перегрузки равна cosθ. Но поскольку заданная таким образом траектория наведения не обязательно проходит через точку С текущего положения носителя, то необходимо добавить составляющую, компенсирующую разность высот ΔН (см. фиг. 1). С учетом этого нормальная составляющая вертикальной перегрузки равна:
nв=cosθ+ƒ(ΔH)
Нормальную составляющую горизонтальной перегрузки определяют в виде:
где R0 - радиус цилиндра вращения, содержащего траекторию C'R.
Теперь можно сформировать заданную нормальную перегрузку и заданный угол крена, необходимые для выведения из текущего положения С в точку сбрасывания R:
Приведенные выше вычисления выполняют на каждом шаге счета алгоритма. Таким образом, организуют итерационный цикл, в ходе которого изменяются текущие значения фазовых координат летательного аппарата, а, значит, и заданные параметры маневра. Эти изменения продолжаются до тех пор, пока летательный аппарат не выйдет на траекторию наведения, после чего полет выполняется с постоянной скоростью, перегрузкой, креном и тангажом.
В соответствии с предлагаемым способом маневр выполняется следующим образом.
Выполнив привязку к оперативно обнаруженной цели или сразу по включении режима при заходе на заранее обнаруженную цель, летчик наблюдает на прицельном индикаторе директорные сигналы заданных значений крена и перегрузки, а также времени, оставшегося до сброса. Контролируя эти сигналы в ходе пилотирования, летчик в любой момент может начать переход на траекторию выведения, а может продолжать сближение по своему усмотрению. Например, для скрытного захода на цель летчик выполняет уход на малую высоту и, чтобы сохранить элемент неожиданности, продолжает полет с ненулевым боковым пеленгом на цель, следуя рельефу местности. Суть метода рассмотрим на частном случае маневра в горизонтальной плоскости с постоянной скоростью V, как показано на фиг. 3. Вначале самолет летит по прямой от точки С0 в сторону наземной цели (точка Р). Для точного сбрасывания груза необходимо, чтобы точка сбрасывания R находилась на окружности радиуса A0R с центром в точке Р, причем вектор начальной скорости груза должен быть направлен в центр этой окружности. В каждой точке траектории рассчитывается дуга окружности C'R', выводящая самолет в одну из возможных точек сбрасывания R'. По мере приближения к цели радиус этой дуги уменьшается, следовательно, увеличивается нормальная перегрузка, потребная для выведения в точку сбрасывания. Наконец, в некоторой точке С перегрузка достигает предельно допустимого значения, после чего необходимо двигаться по дуге CR в директорном или автоматическом режиме. Когда заданная перегрузка достигнет желаемого порогового значения, летчик начинает вираж, следуя директорным сигналам.
При сближении с целью сигнал заданной перегрузки может так и не достигнуть порогового значения. Это имеет место при полете с малым боковым пеленгом на цель. В этом случае о начале маневра летчик судит по директорнуму сигналу времени, оставшегося до сброса, величина которого однозначно определяется длиной дуги CR и скоростью полета. Когда время, оставшееся до сброса, достигнет порогового значения, летчик начинает вираж, следуя директорным сигналам крена и перегрузки.
Использование предлагаемого способа не требует визуального контакта с целью в течение всего маневра. Начало маневра, уровень перегрузки и угол крена не задаются жестко, а выбираются летчиком оперативно в зависимости от его подготовленности и тактической обстановки. Причем, на завершающей фазе маневр выполняется с постоянными параметрами (перегрузка, крен, тангаж), что повышает точность прицеливания. При этом обеспечивается минимизация промаха за счет сбрасывания груза с предельно малой дальности, достаточной, однако, для увода от осколков и встречи с землей.
Способ прицеливания при сбросе грузов в точку земной поверхности с маневрирующего летательного аппарата, заключающийся в том, что измеряют текущие значения фазовых координат летательного аппарата и цели, решают задачу прогнозирования фазовых координат движения маневрирующего летательного аппарата, формируют сигнал координат траектории выведения летательного аппарата, формируют директорные сигналы текущих перегрузки и крена и заданных перегрузки и крена, необходимых для полета по траектории выведения, формируют временной интервал до сброса, по достижении директорными сигналами заданных перегрузки, крена или времени, оставшегося до сброса, управляют наведением летательного аппарата, совмещая директорные сигналы заданной и текущей перегрузки и заданного и текущего крена, отличающийся тем, что для текущих значений скорости и угла наклона траектории определяют минимальную безопасную высоту точки сбрасывания, для которой решают задачу баллистики сбрасываемого груза, и формируют сигнал координат окружности точек сбрасывания, обеспечивающих попадание в цель, формируют сигнал координат поверхности цилиндра, пересекающего окружность точек сбрасывания и содержащего точку текущего положения и прогнозируемую траекторию движения маневрирующего летательного аппарата, выделяют сигнал рассогласования между текущим положением и прогнозируемой траекторией движения маневрирующего летательного аппарата, корректируют сигналы заданных перегрузки и крена сигналом рассогласования для выхода на траекторию выведения.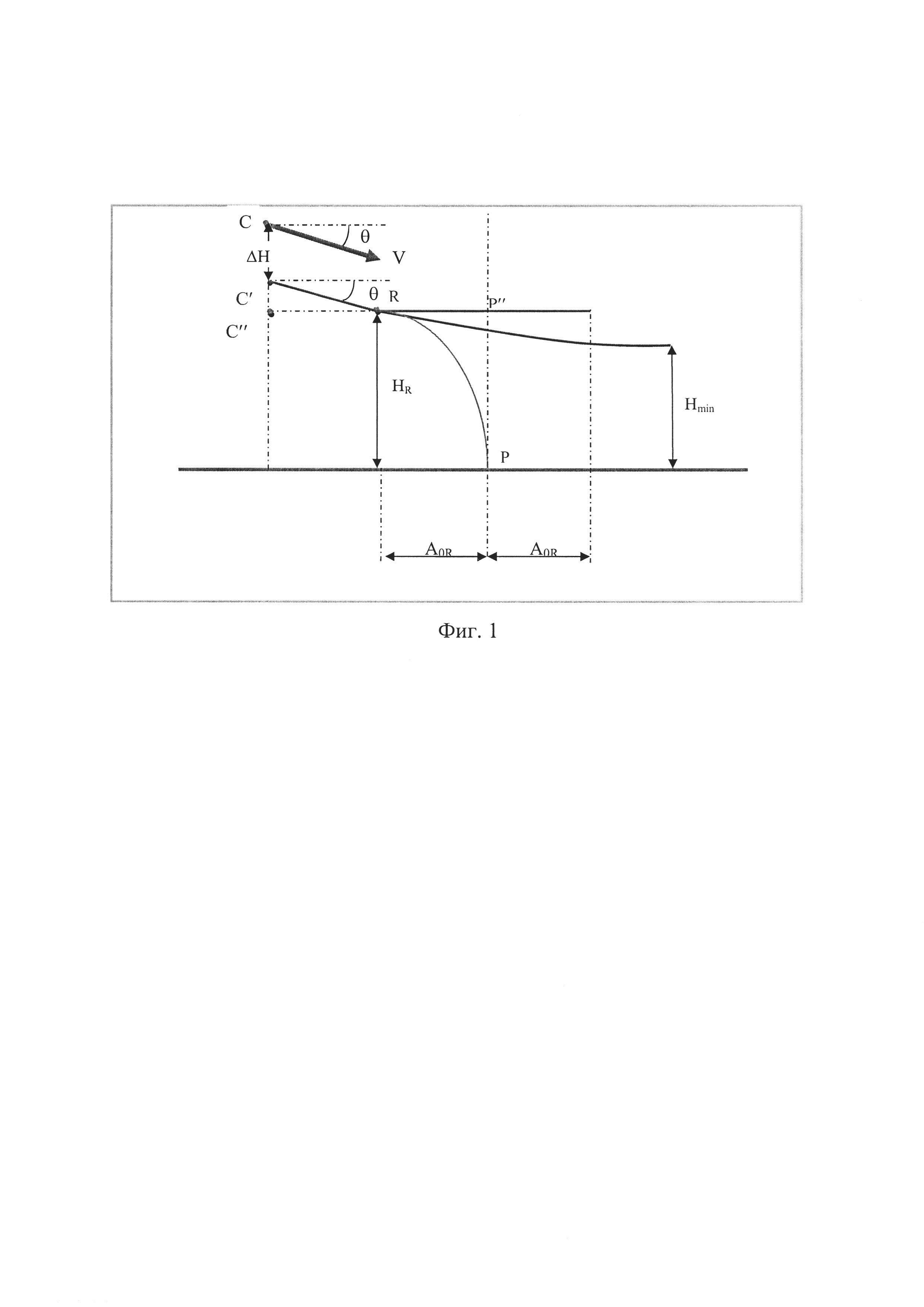
Регистратор температуры и скорости нестационарного газового потока
Регистратор давления и скорости ударной волны
Способ имитации коллимационного эффекта в проекционных системах визуализации внекабинной обстановки для авиационных тренажеров военного назначения и проекционная система визуализации
Способ поиска и обнаружения объекта
Система кондиционирования воздуха летательного аппарата на основе электроприводных нагнетателей и реверсивных парокомпрессионных холодильных установок
Устройство регистрации параметров быстропротекающих процессов
Способ ускорения запуска двигатель-генераторного электромашинного преобразователя постоянного напряжения в переменное и устройство для его реализации
Способы и устройство сжатия изображений. способ и устройство восстановления изображений
Вертикальный ротор ветроводяного двигателя
Способ автоматического определения параметров оптико-электронных систем и составной тест-объект для его осуществления с произвольной конфигурацией составных элементов с единой пространственной частотой
Способ прицеливания при стрельбе из пушки по маневрирующей воздушной цели

