Результат интеллектуальной деятельности: РАССТАНОВКА СЕЙСМИЧЕСКОГО ОБНАРУЖЕНИЯ, ИМЕЮЩАЯ ИДЕНТИФИЦИРУЕМЫЙ ЭЛЕМЕНТ, И СПОСОБ
Вид РИД
Изобретение
Уровень техники
Область техники, к которой относится изобретение
[0001] Варианты осуществления раскрытого объекта изобретения, в общем, относятся к системам сбора сейсмических данных, устройствам и способам, и, более конкретно, к управлению и тестированию таких систем.
Описание уровня техники
[0002] Сейсмические волны, генерируемые искусственно для формирования изображений геологических слоев, используются в течение многих лет. Сейсморазведка методом отраженных волн является способом геофизической разведки, используемым, чтобы определять свойства части слоя геологической среды в толще пород, при этом эта информация является особенно полезной в нефтяной и газовой промышленности. Сейсмические волны (то есть звуковые или другие волны давления) посылаются в толщу пород, направленными в направлении к области геологической среды. Сейсмические данные собираются по отношению к времени, которое затрачивается, чтобы отражения сгенерированных сейсмических волн возвратились в один или более приемников. Отражения, в общем, представляют границы раздела между слоями геологической среды. Сейсмические данные могут, затем, анализироваться, чтобы генерировать профиль (изображение) геофизической структуры, то есть слои исследуемой геологической среды. Этот тип сбора сейсмических данных или сейсморазведки может использоваться как для геологической среды областей толщи пород, так и для разведки геологической среды дна океана. Например, морские способы посылают волны энергии в толщу пород посредством сначала генерирования волн энергии в или на океане.
[0003] Один способ для выполнения морского сбора сейсмических данных или обследования состоит в том, чтобы буксировать группу сейсмических приемников, которые могут располагаться на протяженных сейсмоприемных косах, посредством судна по географической области интереса (GAI) и генерировать сигналы источников с помощью одного или более источников (буксируемых посредством упомянутого судна или специально предназначенного судна, которое буксирует только источники), и принимать соответствующие отражения при перемещении через GAI. Этот процесс иногда упоминается как "съемка" области GAI или участка, которые обследуются.
[0004] Так как морское сейсмические обследования становятся более усовершенствованными, стало возможным буксировать больше источников и приемников за одиночным судном. Сейсмоприемные косы могут теперь быть вплоть до 18 км в длину, буксироваться при скорости приблизительно 5 узлов, 10 м ниже поверхности океана. В дополнение к источникам или приемникам, сейсмоприемные косы могут включать в себя "регуляторы глубины погружения" с поверхностями управления, используемыми, чтобы располагать сейсмоприемную косу вертикально или горизонтально. Сейсмоприемные косы также могут включать в себя другие компоненты, такие как морские модули, которые обрабатывают сейсмические данные, модули восстановления, модули обнаружения млекопитающих, модули измерения дальности, и т.д.
[0005] С учетом длины сейсмоприемных кос, они, в общем, хранятся намотанными на лебедки в задней части судна, когда не используются. Например, лебедка для хранения может хранить вплоть до 18 км сейсмоприемной косы, имеющей диаметр вплоть до 60 мм. Дополнительно, компоненты сейсмоприемных кос являются часто отсоединяемыми друг от друга. Это обеспечивает возможность переконфигурирования сейсмоприемной косы, чтобы включать туда множество элементов позиционирования (например, регуляторов глубины погружения), приемников, секций устранения шума или других элементов, требуемых, чтобы осуществлять съемку конкретной GAI. В этом отношении, отметим, что сейсмоприемная коса может включать в себя десятки, если не сотни, компонентов, которые могут располагаться многими разными способами, чтобы формировать сейсмоприемную косу. Поэтому, как только сейсмоприемная коса помещается на намоточный барабан, является очень трудным идентифицировать каждый компонент сейсмоприемной косы и решать, имеет ли сейсмоприемная коса корректную конфигурацию для следующего сейсмического обследования. Даже более, после того, как сейсмическое обследование завершается и судно используется для другого сейсмического обследования, требующего другой конфигурации сейсмоприемной косы, является логически трудным для оператора судна определять каждый компонент сейсмоприемной косы для переконфигурирования сейсмоприемной косы.
[0006] Является поэтому желательным иметь возможность находить расположение конкретного элемента на сейсмоприемной косе, чтобы удалять или заменять при конфигурировании сейсмоприемных кос для GAI, или для обслуживания. Также является желательным для операторов систем сейсмических измерений иметь возможность осуществлять проверку их инвентаря оборудования, например, их запаса компонентов сейсмоприемной косы. Дополнительно является желательным иметь возможность проверять, что сейсмоприемная коса была корректно сконфигурирована.
[0007] Схема предшествующего уровня техники для управления элементами сейсмоприемной косы включает в себя то, что персонал вручную записывает элементы и их порядок вдоль сейсмоприемной косы в бумажных сводных таблицах. Эти сводные таблицы затем перекрестно сверяются с проектными сводными таблицами. Однако это занимает много времени, является дорогостоящим по труду, и подверженным ошибкам. Другая схема включает в себя размещение меток радиочастотной идентификации (RFID) на одном или более элементе (элементах) на сейсмоприемной косе. Помеченные RFID компоненты могут идентифицироваться автоматически в течение использования сейсмоприемной косы, посредством пропускания сейсмоприемной косы внутри области считывания модуля считывания RFID, например, на задней палубе судна. Хотя это может помогать проверять конфигурацию сейсмоприемной косы, сканирование меток RFID во время использования сейсмоприемной косы не помогает процессу компоновки сейсмоприемной косы, включающей в себя корректные элементы в корректном порядке. Другими словами, если сканирование RFID выполняется, когда сейсмоприемная коса все еще находится на намоточном барабане, топология сейсмоприемной косы не может обнаруживаться. Более того, когда сейсмоприемная коса намотана на лебедку, сигналы RFID от компонентов, более близких к оси лебедки, могут искажаться или ослабляться компонентами, расположенными более далеко от оси лебедки, и информация об элементах теряется. Текущие схемы используют ручное ведение учета для оборудования на лебедках, при этом это ведение учета занимает много времени и подвержено ошибкам. Соответственно, имеется постоянная необходимость в способах точного определения элементов, присутствующих на сейсмической расстановки, и их порядка, даже когда сейсмоприемная коса находится на намоточном барабане в задней части судна. Имеется дополнительная необходимость в способах нахождения расположения неисправных компонентов на сейсмоприемной косе.
Краткое описание
[0008] Согласно одному варианту осуществления, имеется расстановка сейсмического обнаружения, включающая в себя один или более из идентифицируемого элемента (элементов), расположенного в ряд вдоль расстановки сейсмического обнаружения; и телеметрическую линию связи, соединяющую идентифицируемый элемент (элементы) вдоль ряда и сконфигурированную с возможностью передавать сейсмические данные от, по меньшей мере, одного из идентифицируемого элемента (элементов) в регистратор данных и идентификационные данные в контроллер топологии, при этом каждый из идентифицируемого элемента (элементов) включает в себя соответствующий первый блок идентификации, функционально соединенный с телеметрической линией связи, чтобы обеспечивать соответствующий первый идентификатор в контроллер топологии.
[0009] Согласно другому варианту осуществления, имеется система сейсмического детектирования, включающая в себя расстановку сейсмического обнаружения, имеющий один или более из идентифицируемого элемента (элементов), расположенного в ряд вдоль расстановки сейсмического обнаружения, и телеметрическую линию связи, соединяющую идентифицируемый элемент (элементы) вдоль ряда и сконфигурированную с возможностью передавать сейсмические данные от, по меньшей мере, одного из идентифицируемого элемента (элементов) в регистратор данных и идентификационные данные в контроллер топологии, при этом каждый из идентифицируемого элемента (элементов) включает в себя соответствующий первый блок идентификации, функционально соединенный с телеметрической линией связи, чтобы обеспечивать соответствующий первый идентификатор в контроллер топологии; и процессор, функционально соединенный с телеметрической линией связи и сконфигурированный с возможностью последовательно запрашивать идентифицируемые элементы в отношении их соответствующих идентификаторов, определять компоновку расстановки сейсмического обнаружения с использованием принятых идентификаторов, и представлять индикацию определенной компоновки.
[0010] Согласно еще другому варианту осуществления, имеется способ управления расстановкой сейсмического обнаружения, при этом способ включает в себя передачу запроса вдоль телеметрической линии связи расстановки сейсмического обнаружения, при этом телеметрическая линия связи соединяет множество идентифицируемых элементов расстановки сейсмического обнаруженияв ряду и каждый из идентифицируемых элементов включает в себя блок идентификации, сконфигурированный с возможностью передавать соответствующий идентификатор; обнаружение, был ли соответствующий идентификатор одного из элемента (элементов) принят или нет; повторение этапов передачи и обнаружения до тех пор, когда выбранный критерий прекращения удовлетворяется; использование процессора, чтобы автоматически определять компоновку идентифицируемых элементов расстановки сейсмического обнаружения; и использование процессора, чтобы автоматически представлять индикацию определенной компоновки.
Краткое описание чертежей
[0011] Для более полного понимания настоящего изобретения, ссылка теперь делается на последующее описание, взятое совместно с сопровождающими чертежами, на которых:
[0012] Фиг. 1 является схематическим видом сверху иллюстративной системы морского сбора сейсмических данных или сейсморазведки;
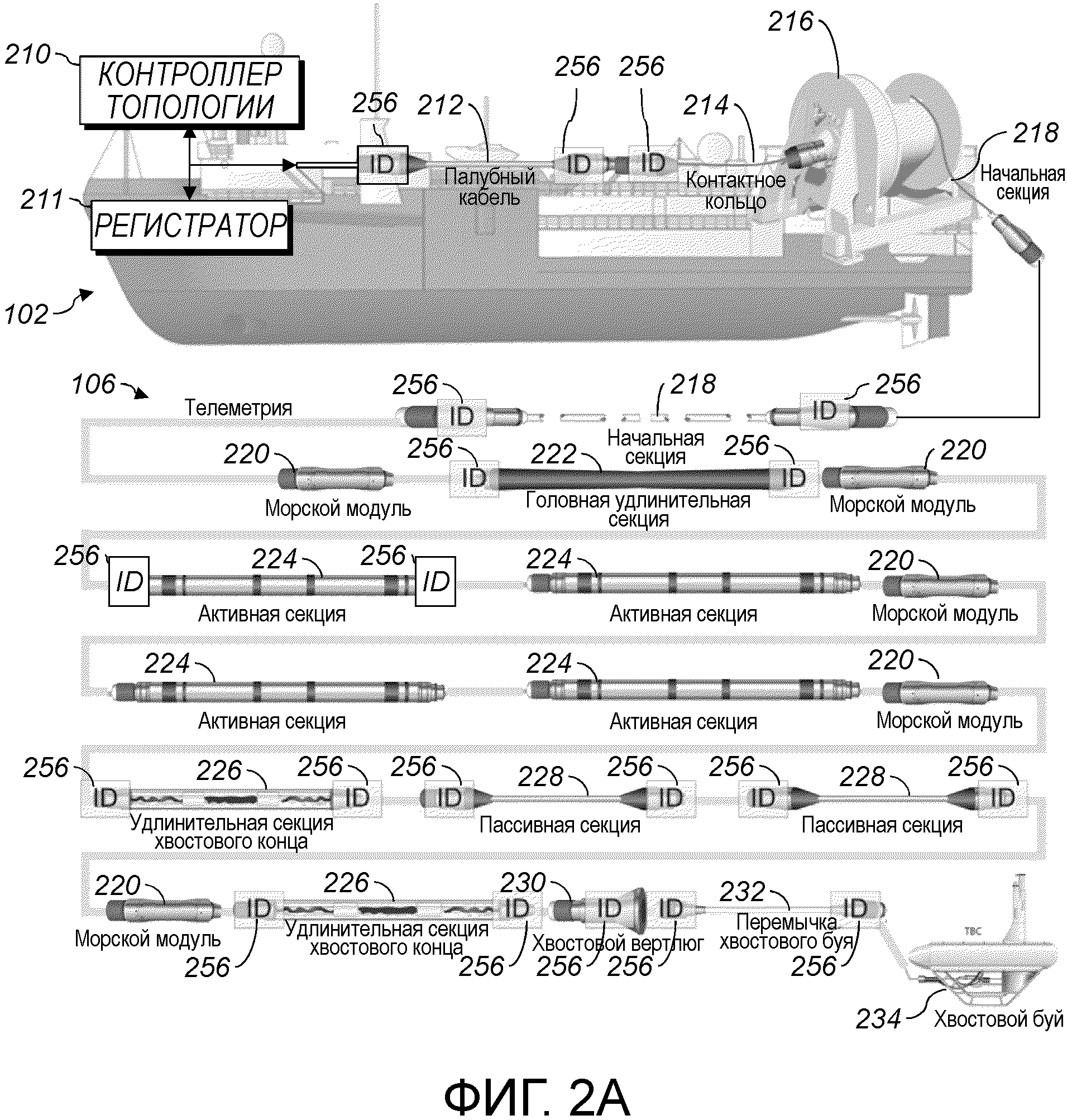
[0013] Фиг. 2A и 2B показывают схему иллюстративного сейсмического судна и иллюстративной сейсмоприемной косы;
[0014] Фиг. 3 является схемой передачи данных в иллюстративной сейсмической системе;
[0015] Фиг. 4 является видом сбоку иллюстративной сейсмической операции;
[0016] Фиг. 5A и 5B являются видами сбоку иллюстративных сейсмических операций;
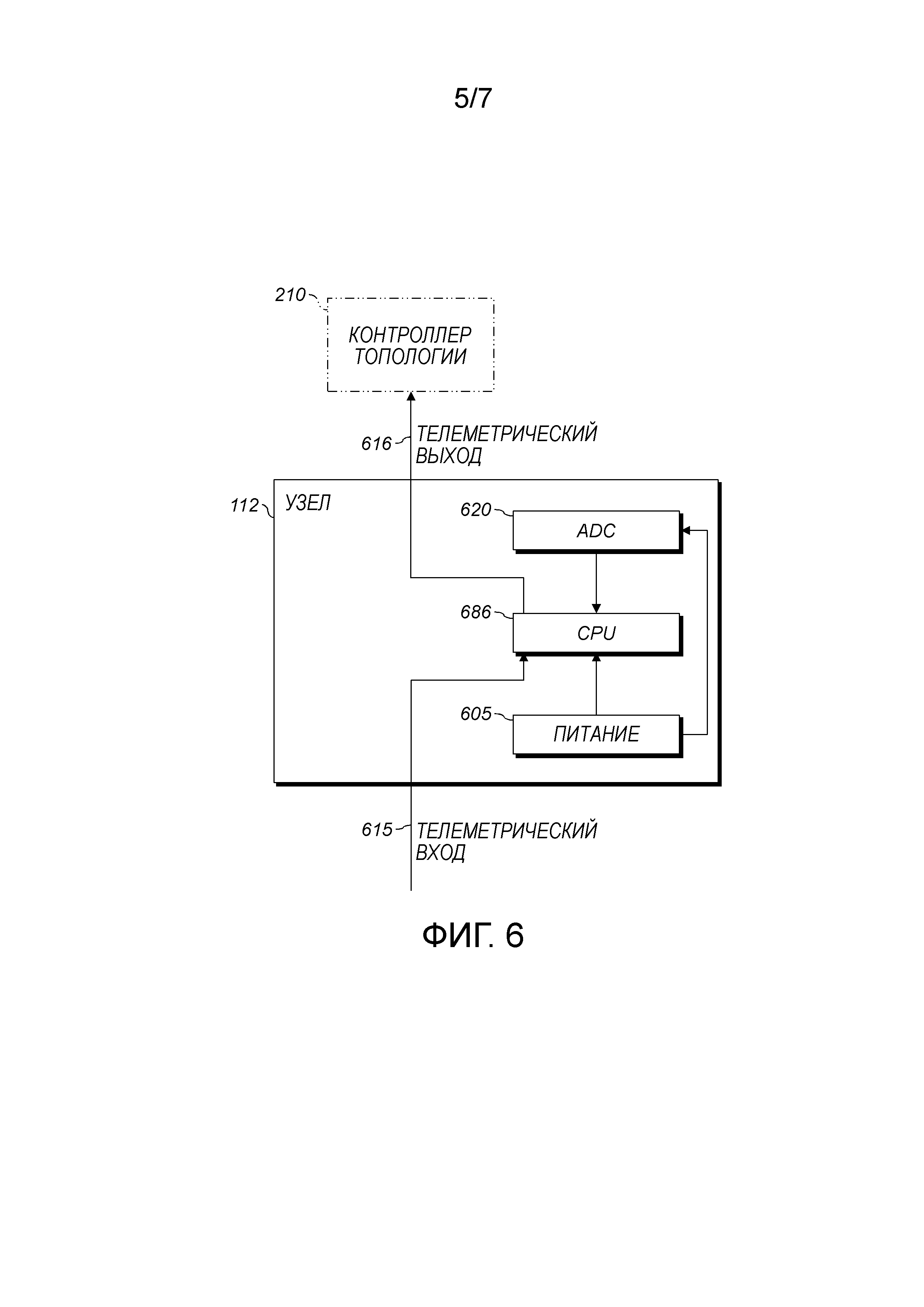
[0017] Фиг. 6 является принципиальной схемой иллюстративного блока идентификации или активного элемента на расстановке сейсмического обнаружения;
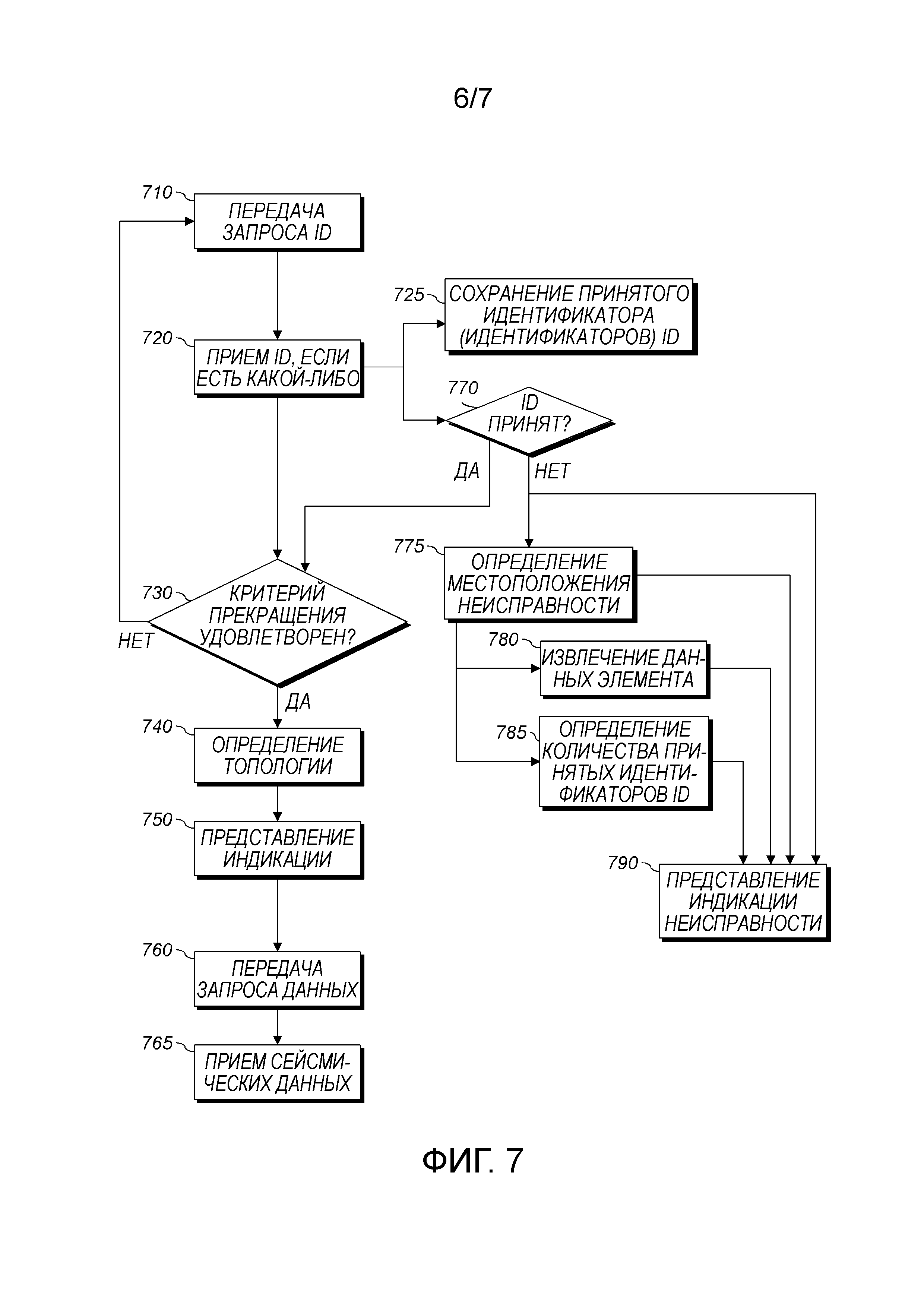
[0018] Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей иллюстративные способы для управления расстановкой сейсмического обнаружения, такой как сейсмоприемная коса, показанная на фиг. 2A; и
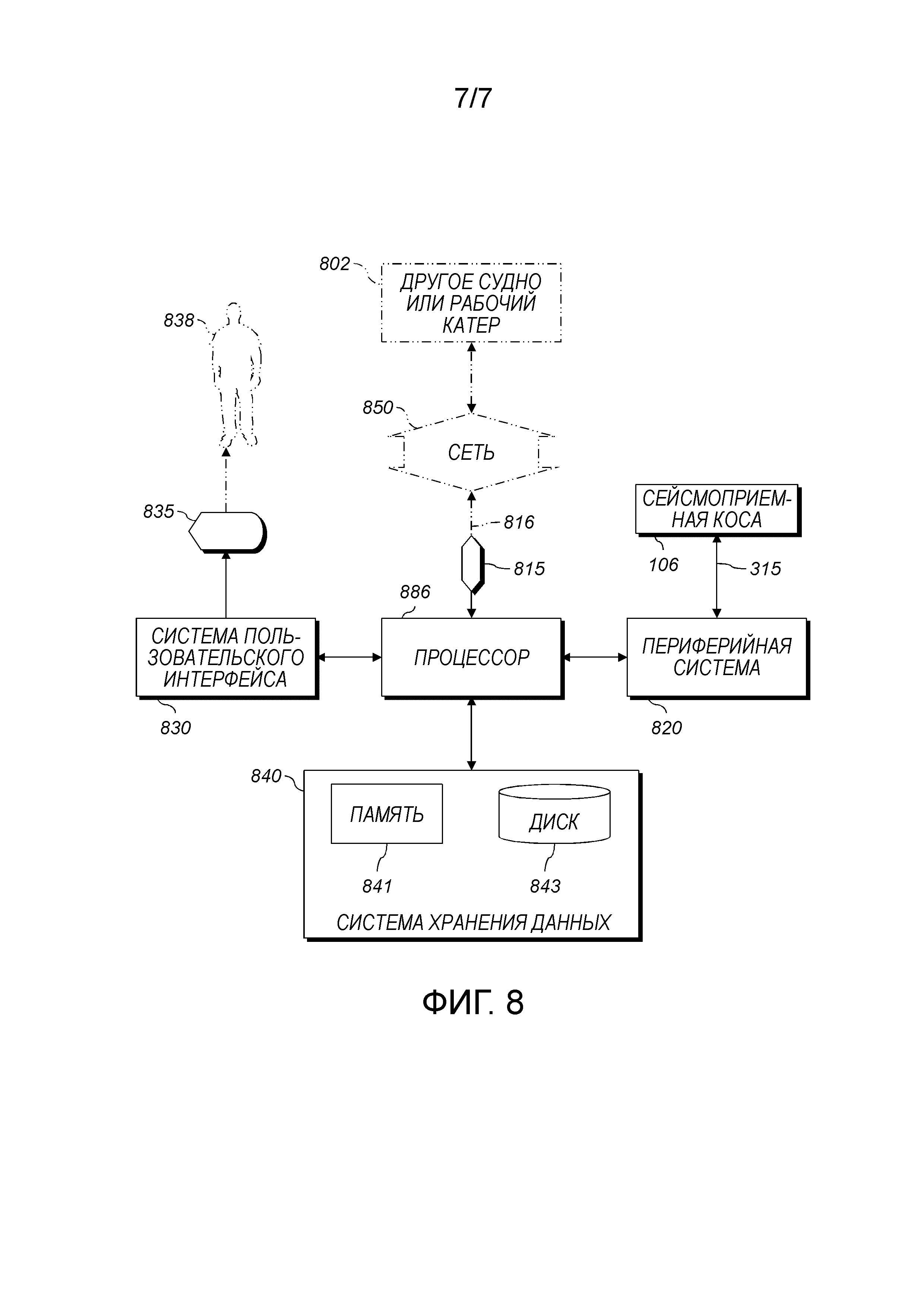
[0019] Фиг. 8 является высокоуровневой диаграммой, показывающей компоненты механизма управления или другой системы обработки данных и относящиеся компоненты.
Подробное описание
[0020] Последующее описание иллюстративных вариантов осуществления ссылается на сопровождающие чертежи. Одинаковые ссылочные позиции на разных чертежах идентифицируют одинаковые или аналогичные элементы. Последующее подробное описание не ограничивает изобретение. Последующие варианты осуществления описываются, для простоты, по отношению к терминологии и структуре буксируемых устройств морского сейсмического обследования. Однако описанные варианты осуществления не ограничены этой конфигурацией, но могут использоваться в других типах сейсмических обследований, например, обследований толщи пород, морского дна, или буровых скважин.
[0021] Указание всюду в описании на "один вариант осуществления" или "вариант осуществления" (или "аспект") означает, что конкретный признак, структура или характеристика, описанный совместно с одним вариантом осуществления, включается в, по меньшей мере, один вариант осуществления раскрытой сущности. Таким образом, появление фраз "в одном варианте осуществления" или "в варианте осуществления" в различных местах всюду в описании не необходимо указывает на один и тот же вариант осуществления. Дополнительно, конкретные признаки, структуры или характеристики могут комбинироваться любым подходящим способом в одном или более вариантах осуществления.
[0022] Всюду в этом описании, некоторые варианты осуществления описываются в терминах, которые обычно осуществляются как программно-реализованные программы. Специалисты в данной области техники должны легко распознавать, что эквиваленты такого программного обеспечения также могут конструироваться в аппаратном обеспечении, встроенном программном обеспечении, микрокоде, или комбинациях перечисленного друг с другом или с программным обеспечением. При учете систем и способов, как здесь описано, программное обеспечение, конкретно здесь не показанное, предложенное, или описанное, которое является полезным для осуществления любого варианта осуществления, является стандартным и находится в пределах обычных возможностей специалиста в данной области техники.
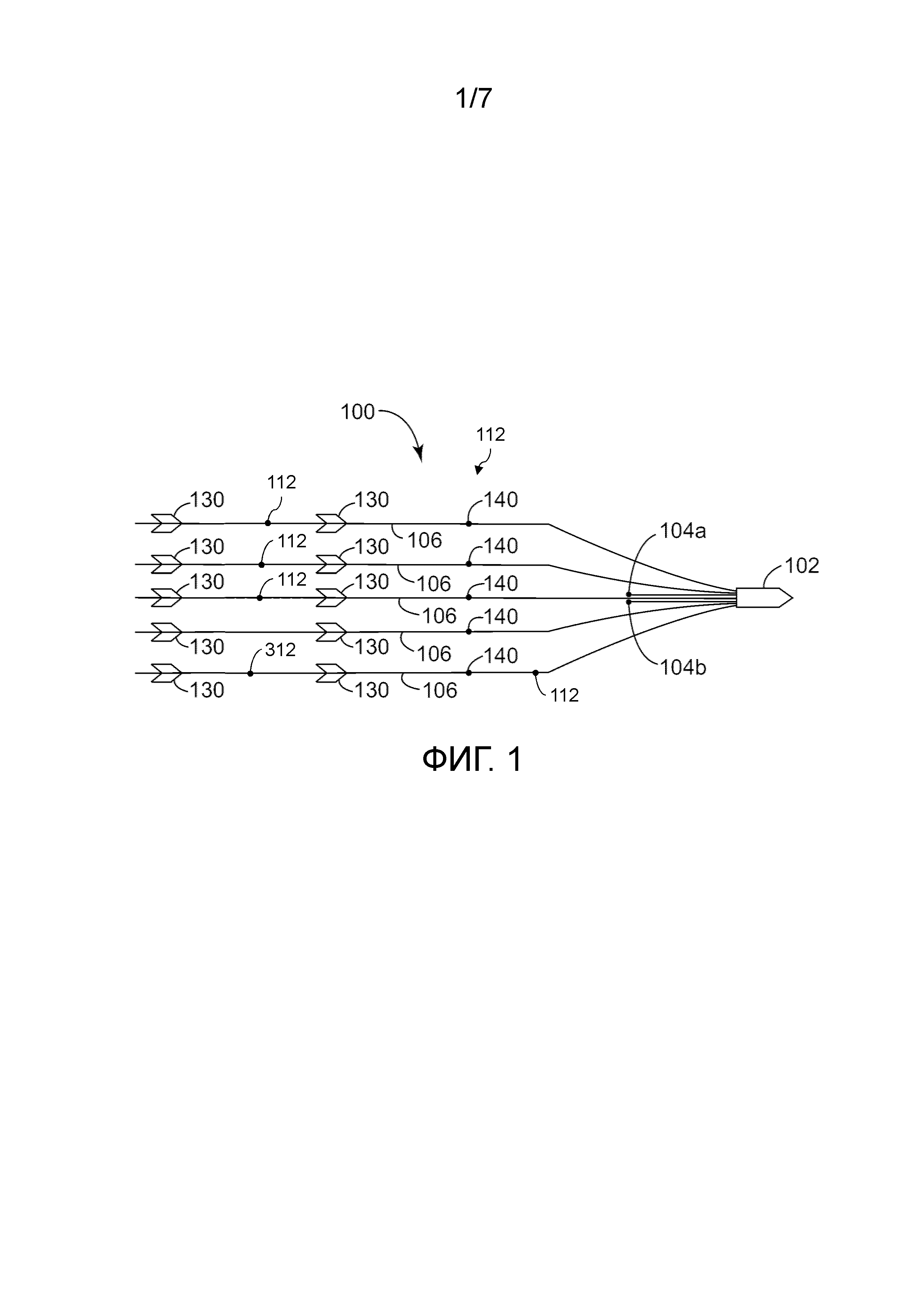
[0023] Фиг. 1 показывает иллюстративную систему 100 сбора сейсмических данных, включающую в себя судно 102, буксирующее множество сейсмоприемных кос 106, которые могут простираться на километры за судном 102. Каждая из сейсмоприемных кос 106 может включать в себя один или более регуляторов 130 глубины погружения, которые поддерживают сейсмоприемную косу 106, к которой они прикреплены, в известном и управляемом положении по отношению к другим сейсмоприемным косам 106. Как отмечено выше, регуляторы 130 глубины погружения выполнены с возможностью перемещения сейсмоприемных кос 106, как требуется, согласно сообщениям или командам, которые регуляторы 130 глубины погружения принимают от судна 102. Один или более источников (или групп источников) 104a, 104b (указываемые индивидуально или собирательно посредством ссылочной позиции 104) также могут буксироваться судном 102 (или другим судном, не показано) для генерирования сейсмических волн. Сейсмические волны, генерируемые посредством источников 104, распространяются вниз, и либо отражаются от, либо проникают через морское дно. Проникающие волны в конечном счете отражаются посредством одной или более отражающих структур (не показаны), которые располагаются в геологической среде морского дна, назад в направлении к поверхности. Отраженные сейсмические волны распространяются вверх и детектируются посредством приемников 140, обеспеченных на сейсмоприемных косах 106. Приемники 140 обеспечивают сейсмические данные детектированных отражений в регистратор 211 данных (фиг. 2A) на судне 102. Источники 104 могут размещаться либо спереди, либо сзади приемников 140, которые прикреплены к сейсмоприемным косам 106, или как сзади, так и спереди приемников 140. Каждая из сейсмоприемных кос 106 может включать в себя один или более приемников 140; для простоты, показан только один приемник 140 на сейсмоприемную косу 106. Приемник 140 может быть любым или комбинацией из гидрофона, геофона, акселерометра, оптического компонента, и т.д. Приемники 140 являются примерами идентифицируемых элементов 112 на сейсмоприемных косах 106. Идентифицируемый элемент 112 является элементом сейсмоприемной косы, который может точно идентифицироваться посредством контроллера, расположенного на борту судна, как будет описано далее. Другие примеры идентифицируемых элементов 112 описываются ниже, например, со ссылкой на фиг. 2. Каждая сейсмоприемная коса 106 может включать в себя один или более идентифицируемых элементов 112. Каждая сейсмоприемная коса 106 также может включать в себя один или более неидентифицируемых элементов 312, описанных ниже со ссылкой на фиг. 3.
[0024] Каждый элемент сейсмической расстановки может иметь сейсмическую телеметрическую линию связи (электрическую, оптическую или радио), идущую через него. Сейсмическая телеметрическая линия связи может идти через пассивные элементы, такие как начальные секции, удлинительные секции, или секции межсоединения, и не прерываться электрически. Сейсмическая телеметрическая линия связи также может идти через или быть соединенной с активными элементами (такими как электронные модули или электроника сбора данных), которые участвуют в обеспечении сейсмических данных назад в сейсмическую центральную систему, например, регистратор211 данных на фиг. 2A.
[0025] Согласно различным вариантам осуществления, в каждый пассивный элемент интегрирован электронный блок идентификации (IDU), который осуществляет связь способами, совместимыми с сейсмической телеметрической линией связи, так что IDU может идентифицироваться системой сбора сейсмических данных (даже хотя он напрямую не вносит вклад в восстановление сейсмических данных), и, таким образом, может интегрироваться в представление топологии, которое обычно отображается для активных элементов.
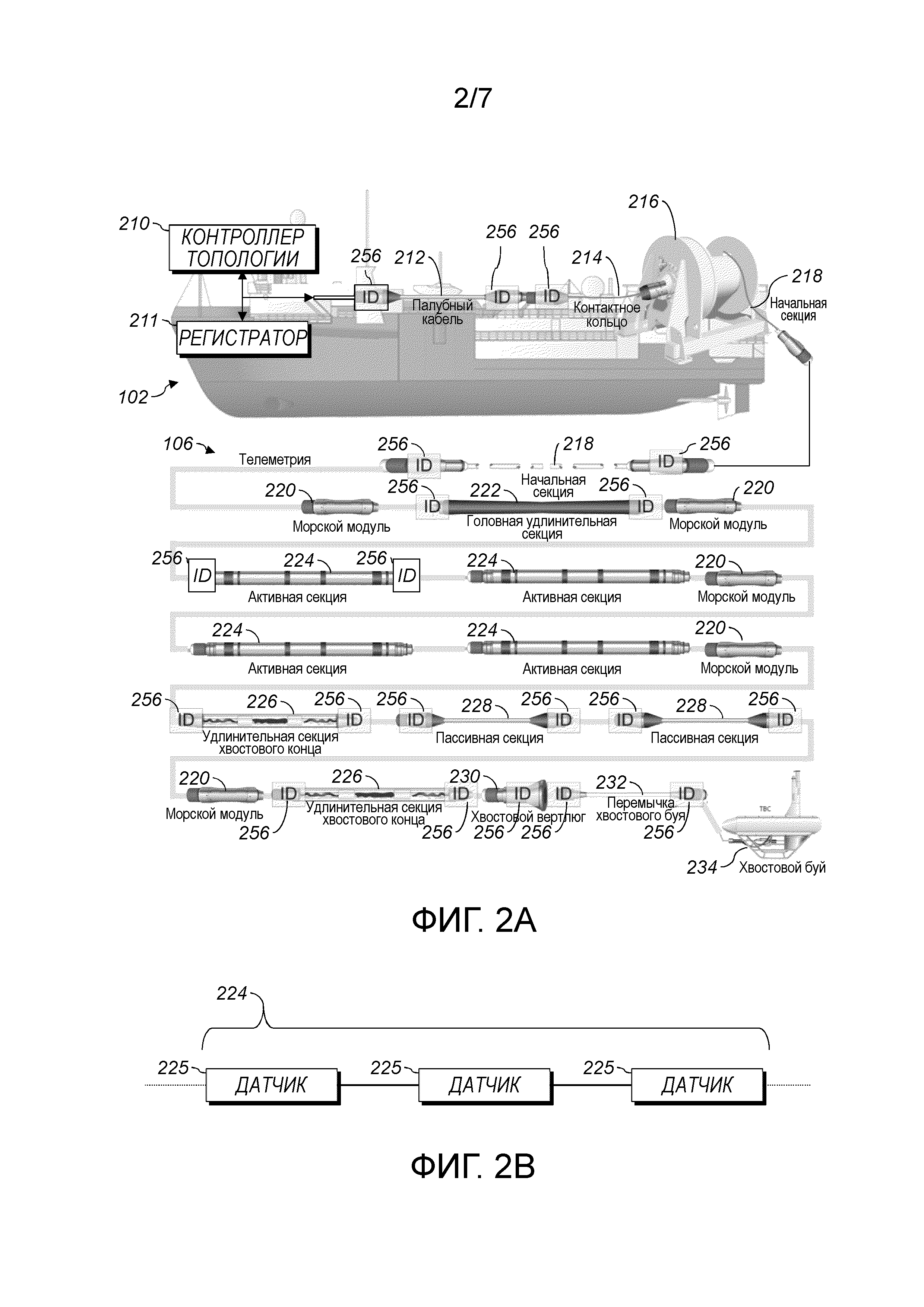
[0026] Фиг. 2A и 2B показывают схему иллюстративного сейсмического судна 102 и иллюстративной сейсмоприемной косы 106, включающей в себя блоки IDU 256. Сейсмоприемная коса 106 является репрезентативной сейсмической конфигурацией, включающей в себя контактное кольцо, начальную секцию, пассивные секции, удлинительные секции, и другие секции, как описано ниже. Как показано на фиг. 2A, сейсмическое судно 102 перевозит контроллер 210 топологии и регистратор211 данных ("регистратор") для регистрации сейсмических данных. Контроллер 210 топологии, как описано ниже, соединен с блоками 256 идентификации, ассоциированными с сейсмоприемной косой 106. Контроллер 210 топологии и регистратор211 данных соединены с возможностью передачи данных с палубным кабелем 212, который соединен посредством контактного кольца 214 или другого соединения с сейсмоприемной косой 106. В одном приложении, контроллер 210 топологии и регистратор211 данных могут располагаться в одном и том же контроллере или вычислительном устройстве. В этом примере, сейсмоприемная коса 106 показана преимущественно размотанной из лебедки 216. Отметим, что телеметрическая линия связи, используемая регистратором211 данных для приема сейсмических данных от различных приемников, распределенных вдоль сейсмоприемной косы, используется совместно с контроллером 210 топологии для определения топологии сейсмоприемной косы 106.
[0027] В схемах предшествующего уровня техники, только активные секции 224 имеют электронику, полезную для представления сейсмических данных. Согласно одному варианту осуществления, каждая секция сейсмоприемной косы включает в себя электронику, которая выполнена с возможностью представления ID этой конкретной секции. Например, сейсморазведочная электроника, используемая в сейсмоприемной косе, также может располагаться в каждой секции для представления информации, относящейся к топологии сейсмоприемной косы. Таким образом, в одном приложении, существующая электроника в активных секциях программируется, чтобы также представлять относящуюся к ID информацию соответствующих секций, и такая же электроника добавляется к пассивным секциям для относящихся к топологии целей. В различных аспектах здесь, блоки идентификации (IDU) 256 являются электроникой, используемой, чтобы обеспечивать представление топологии для пассивных элементов, например, начальных секций, удлинителей, или эластичных секций, используемых, чтобы механически изолировать секции от вибрационного шума. Сами пассивные секции, в общем, не видимы на топологических графиках, так как они не содержат электронику, которая может распознаваться контроллером 210 топологии. Блоки IDU 256 являются распознаваемыми и предпочтительно обеспечивают возможность автоматического обеспечения полного топологического представления, включающего в себя как пассивные, так и активные элементы.
[0028] Часть сейсмоприемной косы 106, соединенная с лебедкой, в этом иллюстративном варианте осуществления упоминается как начальная секция 218. За одним или более сегментом (сегментами) 218 начальной секции может следовать морской модуль 220. Морской модуль 220 включает в себя электронику для выполнения, например, обработки или преобразования сейсмических данных. За морским модулем 220 следует головная удлинительная секция 222 и, необязательно, другой морской модуль 220. Одна или более из активной секции (секций), например, четыре активные секции на фигуре, следуют за морским модулем 220. Морской модуль размещается после, например, каждых двух активных секций, что дает в целом четыре морских модуля 220 в проиллюстрированной иллюстративной конфигурации. После последнего морского модуля 220 находятся, по порядку, удлинительная секция 226 хвостового конца, одна или более пассивных секций 228, удлинительная секция 226 хвостового конца, хвостовой вертлюг 230, перемычка 232 хвостового буя, и хвостовой буй 234. Эти элементы упоминаются здесь собирательно или индивидуально как идентифицируемые элементы 112.
[0029] Некоторые из элементов включают в себя, по меньшей мере, один блок идентификации (IDU) 256. В этом примере, каждый из элементов 212, 218, 222, 226, 228, и 232 имеет соответствующий IDU на каждом конце. Элементы 214, 230 имеют одиночный IDU. Блоки IDU выполнены с возможностью осуществления связи с контроллером 210 топологии, как описано ниже со ссылкой на фиг. 3. Блоки IDU могут служить, чтобы метить или отмечать каждый элемент (пассивный или активный) или секции сейсмоприемной косы 106. Этим способом, может обеспечиваться представление топологии элементов в реальном времени (например, пассивных и активных), соединенных с сейсмоприемной косой или другой сейсмической расстановкой. Это обеспечивает возможность судну и персоналу, проводящему обследование, легко определять в любое время то, какие элементы соединены с конкретной сейсмоприемной косой.
[0030] В различных аспектах, блоки IDU 256 используют такой же интерфейс с телеметрической линией 315 связи, что и активные элементы, передающие сейсмические данные. В различных аспектах, одни и те же протоколы сетевого уровня или более низкие используются для передачи идентификаторов ID и сейсмических данных. Использование одного и того же интерфейса или одного и того же протокола для передачи как идентификаторов ID, так и сейсмических данных указывается здесь как операция "общей линии связи". Общие линии связи могут работать на различных логических уровнях стека передачи, например, физическом, линии передачи данных, сети, транспортном, или прикладных уровнях. В одном неограничивающем примере общей линии связи, блоки IDU 256 и активные элементы используют один и тот же физический соединитель и протокол физического уровня, чтобы осуществлять интерфейс с телеметрической линией 315 связи. В, по меньшей мере, одном аспекте, IDU 256 включает в себя электронику сейсмических датчиков, но без каналов (например, без датчика MEMS, или геофона, или гидрофона). Блоки IDU 256 могут содержаться в концах каждого пассивного элемента, или присоединяться или прикрепляться там. В различных аспектах, активные секции 224 и морские модули 220 уже включают в себя электронику или процессоры, которые могут быть сконфигурированы с возможностью в программном обеспечении обеспечивать данные ID в контроллер 210 топологии, так что эти секции 224 и модули 220 не используют блоки IDU 256 (как показано). В других аспектах, один или более блоков IDU 256 интегрируются в каждый из этих компонентов. В одном приложении, IDU 256 является электроникой или процессорами, присутствующими в активных секциях и/или морских модулях.
[0031] Согласно различным аспектам, поэтому, расстановка сейсмического обнаружения включает в себя один или более из идентифицируемого элемента (элементов) 112, расположенного в ряд вдоль профиля сейсмического детектирования. Примеры расстановки сейсмического обнаружения включают в себя сейсмоприемную косу 106; береговой кабель, сконфигурированный с возможностью развертывания по земле, например, на уровне поверхности земли или в канаве; и кабель, сконфигурированный с возможностью развертывания на дне водного пространства (также называемый кабель для дна океана или кабель для морского дна). Расстановка сейсмического обнаружения включает в себя телеметрическую линию связи, например, телеметрическую линию 315 связи (фиг. 3), соединяющую идентифицируемый элемент (элементы) 112 вдоль ряда и сконфигурированную с возможностью передавать сейсмические данные от, по меньшей мере, одного из идентифицируемого элемента (элементов) 112 в регистратор211 данных, и идентификационные данные в контроллер 210 топологии. В конфигурациях, в которых расстановка сейсмического обнаружения является сейсмоприемной косой 106, по меньшей мере, один из идентифицируемого элемента (элементов) 112 может быть сконфигурирован с возможностью монтироваться на лебедку 216. Более того, в таких конфигурациях, упомянутые один или более из идентифицируемого элемента (элементов) 112 могут включать в себя один или более из регулятора (регуляторов) 130 глубины погружения, прикрепленного к расстановке сейсмического обнаружения (сейсмоприемной косе 106) и сконфигурированного с возможностью содействия в позиционировании расстановки сейсмического обнаружения (сейсмоприемной косы 106).
[0032] Примеры идентифицируемого элемента (элементов) 112 включают в себя морской модуль 220, активную секцию 224, сконфигурированную с возможностью обеспечивать сейсмические данные в регистратор211 данных, регуляторы 130 глубины погружения, устройства восстановления, пассивные секции, секции измерения дальности, секции обнаружения млекопитающих, палубный кабель 212, контактное кольцо 214, начальную секцию 218, головную удлинительную секцию 222, удлинительную секцию 226 хвостового конца, пассивную секцию 228, удлинительную секцию 226 хвостового конца, хвостовой вертлюг 230, перемычку 232 хвостового буя, хвостовой буй 234, и, по существу, любой элемент, который присутствует в сейсмоприемной косе. Каждый из идентифицируемого элемента (элементов) 112, например, активная секция 224, включает в себя соответствующий первый IDU 256, функционально соединенный с телеметрической линией 315 связи, чтобы обеспечивать соответствующий первый идентификатор в контроллер 210 топологии.
[0033] В различных аспектах, каждый из элементов в расстановке сейсмического обнаружения является идентифицируемым элементом 112, конкретно, в этих аспектах, упомянутые один или более из идентифицируемого элемента (элементов) 112 включает в себя все активные сейсмические элементы (например, активную секцию 224) и все пассивные элементы (например, пассивную секцию 228) на расстановке сейсмического обнаружения (например, сейсмоприемной косе 106). В других аспектах, расстановка сейсмического обнаружения включает в себя, по меньшей мере, один неидентифицируемый элемент 312, описанный ниже со ссылкой на фиг. 3. В некоторых конфигурациях, расстановка сейсмического обнаружения включает в себя, по меньшей мере, один не идентифицируемый (то есть неидентифицируемый) активный сейсмический элемент, такой как элемент 312 (фиг. 3), расположенный вдоль ряда и функционально соединенный, чтобы обеспечивать сейсмические данные в регистратор 211 данных. В этих конфигурациях, сейсмические данные могут обеспечиваться в регистратор211 данных и идентификационная информация может обеспечиваться в контроллер 210 топологии, но как сейсмические данные, так и идентификационная информация могут передаваться по одной и той же телеметрической линии 315 связи.
[0034] Фиг. 2B показывает иллюстративную конфигурацию активной секции 224. В этом примере, активная секция 224 включает в себя три сейсмических датчика 225. Использование множества датчиков 225 в активной секции 224 обеспечивает возможность, например, усреднения принятых данных, чтобы уменьшать шум. Любое количество датчиков 225 может использоваться в активной секции 224. Разные активные секции 224 могут иметь одно и то же количество датчиков 225 или разные количества датчиков 225.
[0035] Все еще ссылаясь на фиг. 2A и 2B, показана система сейсмического детектирования. Система включает в себя расстановка сейсмического обнаружения, например, сейсмоприемную косу 106. Сейсмоприемная коса 106 включает в себя один или более из идентифицируемого элемента (элементов) (например, элементы 218, 220, 222, 224, 226, 228, 230, 232, или 256, собирательно или индивидуально указываемые здесь посредством ссылочной позиции 112), расположенных в ряд вдоль сейсмоприемной косы 106. Сейсмоприемная коса 106 также включает в себя телеметрическую линию 315 связи (фиг. 3), соединяющую идентифицируемый элемент (элементы) 112 вдоль ряда и сконфигурированную с возможностью передавать (a) сейсмические данные от, по меньшей мере, одного из идентифицируемого элемента (элементов) 112 в регистратор211 данных и (b) идентификационные данные в контроллер 210 топологии. Каждый из идентифицируемого элемента (элементов) 112 включает в себя соответствующий первый блок 256 идентификации, функционально соединенный с телеметрической линией 315 связи, чтобы обеспечивать соответствующий первый идентификатор в контроллер 210 топологии. Как уже отмечено, блок 256 идентификации может быть существующим контроллером или электроникой, ассоциированной с обработкой сейсмических данных и расположенной в секции сейсмоприемной косы. Контроллер 210 топологии и регистратор211 данных могут осуществляться в одном устройстве или более, чем одном устройстве, и алгоритмы могут выполняться с использованием одного процессора 886 (фиг. 8) или множества процессоров 886.
[0036] Процессор 886 может осуществляться, например, в контроллере 210 топологии, который функционально соединен с телеметрической линией 315 связи и сконфигурирован с возможностью последовательно запрашивать элементы 112 в отношении их соответствующих идентификаторов, определять компоновку сейсмоприемной косы 106 (или другой расстановки сейсмического обнаружения, и аналогично всюду) с использованием принятых идентификаторов, и представлять индикацию (например, изображение на мониторе) определенной компоновки. В одном приложении, процессор 886 может генерировать изображение, аналогичное тому, что показано на фиг. 2A, показывающее точное местоположение каждого компонента сейсмоприемной косы по отношению к судну. Процессор 886 может дополнительно быть сконфигурирован с возможностью представлять индикацию неисправности, соответствующую элементу 112, от которого никакой соответствующий идентификатор (ID) не принят. Индикация неисправности может, например, представляться, когда процессор 886 не устанавливает связь с IDU 256, соответствующим элементу 112. Упомянутые один или более из идентифицируемого элемента (элементов) 112 могут включать в себя, по меньшей мере, одну активную секцию 224, сконфигурированную с возможностью передавать сейсмические данные посредством телеметрической линии 315 связи, и процессор 886 может быть сконфигурирован с возможностью записывать сейсмические данные от активной секции 224 посредством телеметрической линии 315 связи.
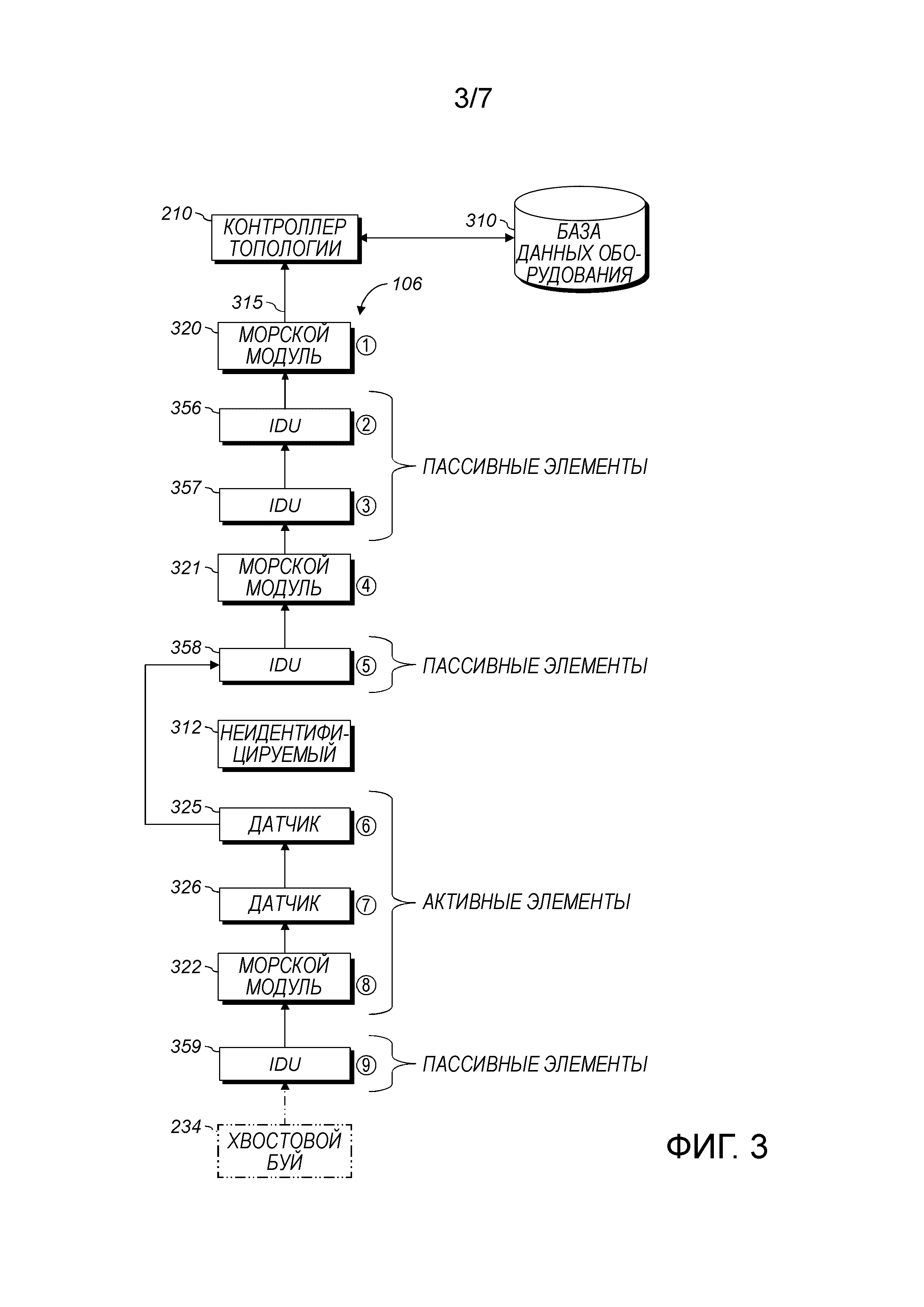
[0037] Фиг. 3 является схемой передачи данных в иллюстративной сейсмической системе. Контроллер 210 топологии на сейсмическом судне осуществляет связь с базой 310 данных оборудования, описанной ниже. Устройство (устройства) в сейсмоприемной косе 106 осуществляют связь с контроллером 210 топологии посредством телеметрической линии 315 связи. Как здесь используется, передачи данных "вверх" осуществляются по направлению к контроллеру 210 топологии и передачи данных "вниз" осуществляются от контроллера 210 топологии. Сейсмические данные обычно посылаются вверх посредством телеметрической линии 315 связи в регистратор211 данных (фиг. 2A).
[0038] В этом примере, телеметрическая линия 315 связи является последовательной шиной или другой линией передачи данных между контроллером 210 топологии или регистратором211 данных и элементами расстановки сейсмического обнаружения, например, блоками IDU 256 или активными элементами 224. Телеметрическая линия 315 связи может включать в себя, например, одну или более витых пар или других пар проводников, экранированных или неэкранированных (например, двух пар проводников). Одна витая пара может использоваться для передач вверх и отдельная витая пара для передач вниз, или одиночная витая пара может использоваться для двунаправленных передач данных, например, посредством подходов мультиплексирования с разделением времени или частот или обнаружения коллизий, таких как те, что используются в Ethernet. Витая пара (пары) может переносить питание и данные, например, в раздельных частотных диапазонах (например, питание DC и сигнал AC). RS-422, RS-485, Ethernet, или другие протоколы могут использоваться, чтобы осуществлять связь посредством телеметрической линии 315 связи. Могут использоваться различные шинные протоколы, чтобы осуществлять связь посредством телеметрической линии 315 связи, например, полудуплексные или полнодуплексные протоколы, или синхронные или асинхронные протоколы.
[0039] В этом примере, начиная с регистратора, устройствами на телеметрической линии 315 связи являются морской модуль 320, блок идентификации (IDU) 356, IDU 357, морской модуль 321, IDU 358, датчик 325, датчик 326, морской модуль 322, и IDU 359. Хвостовой буй 234, показанный пунктиром, соединен с телеметрической линией 315 связи в, по меньшей мере, одном аспекте. Каждое из этих устройств упоминается здесь как "идентифицируемый элемент" (элемент 112, фиг. 1), который может передавать идентификатор (ID) в контроллер 210 топологии. Отметим, что каждый элемент за исключением элемента 312 имеет, по меньшей мере, один IDU (не показан). В одном приложении, один или более из идентифицируемых элементов имеют два IDU, один на каждом конце, для определения не только положения идентифицируемого элемента в сейсмоприемной косе, но также ориентации идентифицируемого элемента по отношению к судну. В дополнение, иллюстративная сейсмоприемная коса 106 включает в себя неидентифицируемый элемент 312, физически расположенный на сейсмоприемной косе между IDU 358 и датчиком 325, но не соединенный с телеметрической линией 315 связи. Сейсмоприемная коса 106 может включать в себя любую комбинацию идентифицированных и неидентифицируемых элементов. Например, дополнительные идентифицируемые элементы могут соединяться с телеметрической линией 315 связи между блоками IDU 356, 357. Идентифицируемые элементы могут быть или активными элементами (например, датчиками 325, 326), или пассивными элементами (например, пассивной секцией 228, фиг. 2A). Неидентифицируемые элементы могут, подобным образом, быть или активными, или пассивными. В этом примере, блоки IDU 356, 357, 358, 359 соответствуют пассивным элементам, и датчик 325, датчик 326, и морские модули 320, 321, 322 являются активными элементами.
[0040] Контроллер 210 топологии может запрашивать идентификаторы ID идентифицируемых элементов 112 различными способами. Каждый ID может включать в себя, например, 128-битный глобально уникальный идентификатор (GUID), такой как используется в системах MICROSOFT WINDOWS, 128-битный универсально уникальный идентификатор (UUID), такой как используется в системах OSF DCE, адрес уровня управления доступом к среде передачи (MAC), такой как 48-битный адрес MAC Ethernet, или 64-битный уникальный идентификатор ONE-WIRE. Контроллер 210 топологии может хранить в базе 310 данных оборудования отображение между положением на сейсмоприемной косе и принятым ID. Положение может определяться посредством каждого IDU 256, увеличивающего поле данных кадра данных, передаваемого контроллером 210 топологии. Этим способом, так как кадр данных проходит последовательные блоки IDU 256, положения соответствующего идентифицируемого элемента (элементов) 112 определяются. В показанном примере, отображением является положение 1 → элемент 320, 2→356, 3→357, 4→321, 5→358, 6→325, 7→326, 8→322, 9→359. На фиг. 3, эти положения на сейсмоприемной косе показаны как числа круге.
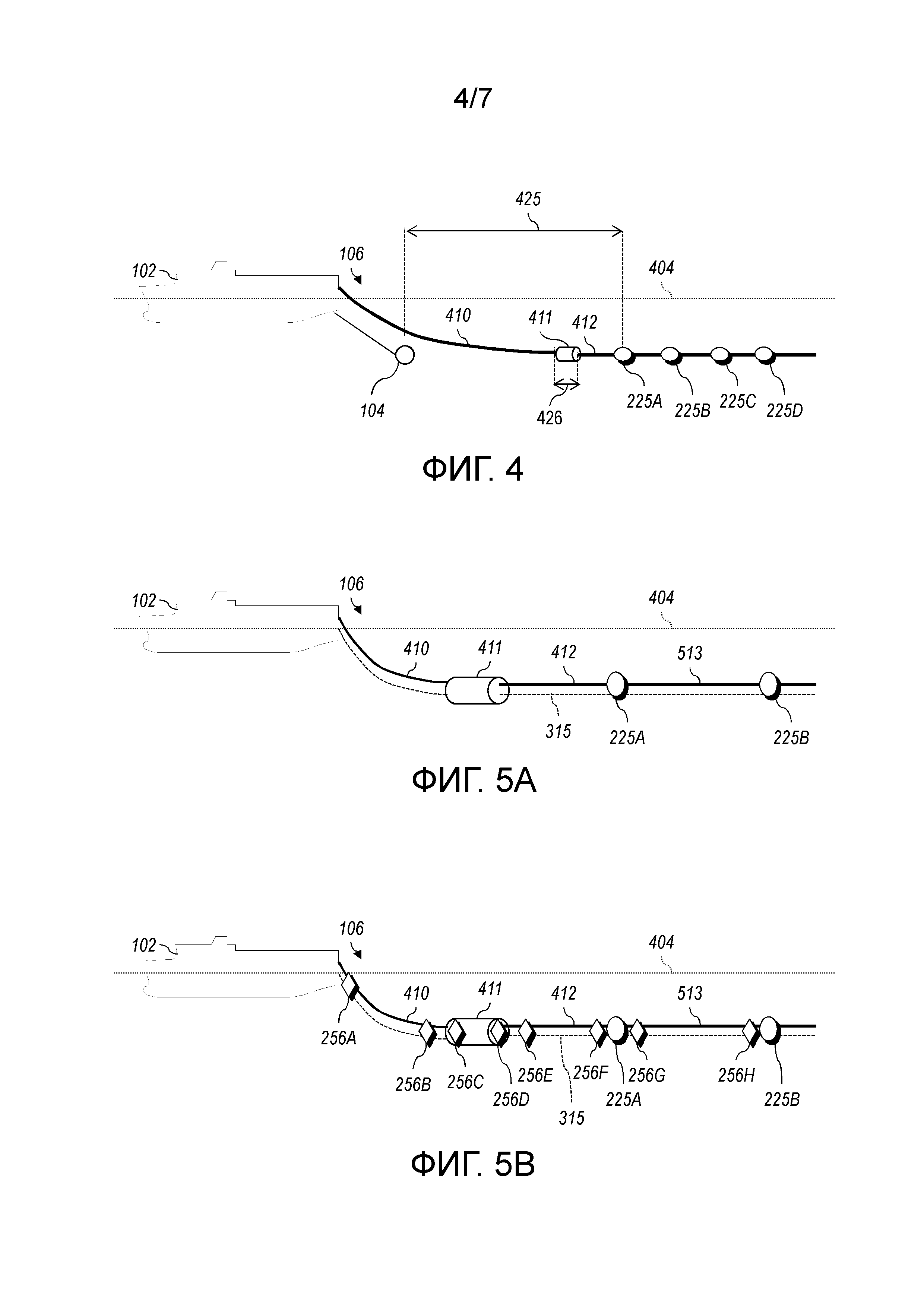
[0041] Фиг. 4 является видом сбоку иллюстративной сейсмической операции. Судно 102 находится в движении, источник 104 буксирования и сейсмоприемная коса 106 находятся ниже уровня 404 воды. Для простоты, фигура показывает одиночную сейсмоприемную косу, но на практике судном буксируется, больше, чем одна сейсмоприемная коса. Сейсмоприемная коса 106 включает в себя идентифицируемый элемент 410 (например, пассивную секцию) и датчики 225A, 225B, 225C, 225D. Как показано, является желательным определять горизонтальное расстояние 425 между источником 104 и датчиком 225A (и подобным образом для других датчиков), чтобы точно обрабатывать сейсмические данные, детектируемые посредством датчика 225A. Расстояние 425 может определяться посредством суммирования длин вдоль горизонтали элементов сейсмоприемной косы, например, длины 426 элемента 411 и соответствующих длин элементов 410, 412. Длины могут храниться в базе 310 данных оборудования (фиг. 3) для различных типов оборудования. Поиск идентификаторов ID элементов на сейсмоприемной косе 106 в базе 310 данных оборудования предпочтительно обеспечивает возможность определения расстояния 425 без необходимости, например, разворачивать сотни метров сейсмоприемной косы 106 на палубе судна 102 и измерять вручную. Поиск в базе данных также предпочтительно обеспечивает возможность автоматического пересчета расстояния 426, когда элементы добавляются к или удаляются из сейсмоприемной косы 106, между судном 102 и датчиком 225A, и, подобным образом, для других датчиков или расстояний вдоль сейсмоприемной косы.
[0042] Фиг. 5A является видом сбоку иллюстративной сейсмической операции. В аспектах, использующих последовательные или шлейфовые телеметрические линии 315 связи (представленные графически посредством пунктирной линии), поломка или отказ где-либо в телеметрической линии 315 связи может разрывать соединение с любым элементом ниже поломки. Когда такие поломки происходят, является необходимым для персонала обследования определять местоположение поломки, чтобы исправлять ее. В показанном примере, поломка где-либо выше датчика 225A будет давать результатом потерю связи с датчиком 225A. Персонал обследования должен будет тестировать элементы 410, 411, и 412, чтобы определять местоположение отказа, и может быть необходимо тестировать датчик 225A, чтобы определять, была ли потеря связи вызвана отказом датчика, нежели отказом телеметрической линии связи. Это исследование является характеристикой различных схем предшествующего уровня техники и может легко выполняться с использованием ID каждого элемента, как описано далее.
[0043] Фиг. 5B является видом сбоку иллюстративной сейсмической операции, использующей блоки IDU. IDU 256A располагается на верхнем конце элемента 410 и IDU 256B располагается на нижнем конце элемента 410. Подобным образом, блоки IDU 256C, 256D располагаются на верхнем, нижнем концах элемента 411; блоки IDU 256E, 256F на элементе 412; и блоки IDU 256G, 256H на элементе 513. Если происходит поломка выше датчика 225A, некоторые из блоков IDU 256A-256F могут все еще быть достижимыми посредством телеметрической линии 315 связи. Если никакие из блоков IDU 256A-256F не достижимы, неисправность находится выше элемента 410. Если IDU 256A является достижимым, но IDU 256B нет, неисправность находится в элементе 410. Если блоки IDU 256A, 256B являются достижимыми, но IDU 256C нет, неисправность находится в соединении между элементом 410 и элементом 411. Подобным образом, всюду на сейсмоприемной косе 106, неисправность находится между самым дальним-нижним достижимым IDU 256 (то есть самым дальним-нижним IDU 256, с которым контроллер 210 топологии может выполнять нормальную связь) и следующим IDU 256 ниже. Это предпочтительно обеспечивает возможность точного определения местоположений неисправностей, даже пока сейсмоприемная коса работает или судно 102 находится в движении, что в свою очередь обеспечивает возможность отправки рабочего катера, чтобы исправлять неисправность. Любое количество блоков IDU 256 может использоваться на любом количестве идентифицируемых элементов. Чем больше блоков IDU 256 используется, тем более точно может определяться местоположение неисправности.
[0044] Соответственно, в различных аспектах, расстановка сейсмического обнаружения (например, сейсмоприемная коса 106) включает в себя первые блоки идентификации (например, блоки IDU 256A, 256C, 256E, 256G), расположенные на соответствующем первом конце соответствующего одного из идентифицируемого элемента (элементов) 112 (например, элементов 410, 411, 412, 513, соответственно). Каждый из идентифицируемого элемента (элементов) 112 дополнительно включает в себя соответствующий второй IDU 256B, 256D, 256F, 256H, расположенный на соответствующем втором конце соответствующего одного из идентифицируемого элемента (элементов) 112 (элементов 410, 411, 412, 513, соответственно). Каждый соответствующий второй IDU 256B, 256D, 256F, 256H функционально соединен с телеметрической линией (315) связи, чтобы обеспечивать в контроллер (210) топологии соответствующий второй идентификатор.
[0045] В некоторых из этих аспектов, для каждого из идентифицируемого элемента (элементов) 112, соответствующий первый идентификатор и соответствующий идентификатор являются одним и тем же. Этот идентификатор указывается здесь как "общий идентификатор" соответствующего одного из идентифицируемого элемента (элементов) 112. Первые блоки IDU 256A, 256C, 256E, 256G и вторые блоки IDU 256B, 256D, 256F, 256H каждого из идентифицируемого элемента (элементов) 112 (элементов 410, 411, 412, 513, соответственно), каждый, сконфигурированы с возможностью обеспечивать общий идентификатор соответствующего идентифицируемого элемента 112 в контроллер 210 топологии посредством телеметрической линии 315 связи. Например, блоки IDU 256A, 256B могут, каждый, обеспечивать один и тот же общий идентификатор, соответствующий элементу 410. Это может предпочтительно уменьшать размер информации топологии, хранимой в базе 310 данных оборудования, и время, требуемое, чтобы определять топологию расстановки сейсмического обнаружения, при сохранении возможности определять местонахождение неисправностей между идентифицируемым элементом (элементами) 112.
[0046] В других из этих аспектов, для каждого из идентифицируемого элемента (элементов) 112, соответствующий первый идентификатор и соответствующий второй идентификатор являются разными. Например, IDU 256A может обеспечивать другой идентификатор, нежели IDU 256B. В некоторых конфигурациях, таких как конфигурации, использующие последовательные номера или идентификаторы UUID в качестве идентификаторов, нежели коды изделия, каждый из идентифицируемого элемента (элементов) 112 имеет уникальный соответствующий первый идентификатор и уникальный соответствующий второй идентификатор. Это может предпочтительно обеспечивать возможность определения местонахождения неисправностей как между, так и внутри идентифицируемого элемента (элементов) 112.
[0047] Фиг. 6 показывает иллюстративный идентифицируемый элемент 112, например, IDU 256, или активный элемент, такой как датчик 225 (фиг. 2B). Идентифицируемый элемент (элементы) 112 также может упоминаться как "узлы" и может иметь уникальные идентификаторы, например, как описывалось выше со ссылкой на фиг. 3. Вверх - это по направлению к верхней части фигуры.
[0048] Линия 615 связи переносит телеметрические или идентификационные данные от нижних узлов. Линия 615 связи также может переносить другие связанные с передачей вверх сигналы. Линия 616 связи переносит идентификационные данные от идентифицируемого элемента (элементов) 112 ("Узел") в контроллер 210 топологии (показанный пунктиром). Идентифицируемый элемент (элементы) 112 может включать в себя PHY, MAC, или другие устройства приемопередатчика, чтобы осуществлять связь посредством линий 615, 616 связи.
[0049] Линия питания (не показана) может переносить питание вниз от контроллера топологии в идентифицируемый элемент (элементы) 112 и от идентифицируемого элемента (элементов) 112 ниже в другой идентифицируемый элемент (элементы), например, блоки IDU, или другие устройства на сейсмоприемной косе 106. Питание обеспечивается в электронику в идентифицируемом элементе (элементах) 112 посредством модуля 605 питания, например, регулятора, который обеспечивает более низкие напряжения в рабочие электроники от обеспечения питания более высокого напряжения, переносимого по линии питания.
[0050] Проиллюстрированный идентифицируемый элемент 112 включает в себя центральное обрабатывающее устройство (CPU) 686 или другой процессор, например, как описано ниже со ссылкой на фиг. 8. Процессор 686 может быть соединен с памятью (не показана) и устройствами измерения или обработки сигналов, такими как аналого-цифровые преобразователи (ADC) 620. ADC 620 может, например, обеспечивать процессор 686 цифровыми данными чтения гидрофона. Процессор 686 может включать в себя или быть соединен с машиночитаемым носителем, таким как материальный, нетранзиторный машиночитаемый запоминающий носитель, чтобы хранить, например, компьютерные программные инструкции, чтобы выполнять способы, здесь описанные, для представления идентификационной информации, или способы для обработки или передачи сейсмических данных. Например, процессор 686 может принимать тестовые опросы посредством телеметрической линии 315 связи (фиг. 3), например, посредством линии 616 связи. Процессор 686 может передавать идентификационную информацию, такую как адрес MAC или UUID посредством телеметрической линии 315 связи, включающей в себя линию 616 связи, в ответ на тестовые опросы.
[0051] В иллюстративном датчике 225, идентифицируемый элемент 112 соединен с одним или более внешними устройствами (не показаны), например, магнитным компасом или блоком (блоками) электроники цифрового канала. Любое количество блоков электроники может использоваться в элементе или секции, как требуется. Иллюстративный блок электроники может включать в себя блок фильтров, чтобы фильтровать входящие сейсмические данные, например, от акселерометра MEMS или гидрофона или другого типа датчика. Фильтрованные данные могут сохраняться в памяти или передаваться вверх процессором 686 посредством телеметрической линии 315 связи (фиг. 3), включающей в себя линию 616 связи, в регистратор211 данных (фиг. 2).
[0052] Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей иллюстративные способы для управления расстановкой сейсмического обнаружения, например, сейсмоприемной косой 106, показанной на фиг. 1. Этапы могут выполняться в любом порядке за исключением случая, когда определено иначе, или когда данные из более раннего этапа используются в более позднем этапе. В различных примерах, обработка начинается с этапа 710. Для ясности описания, ссылка здесь делается на различные компоненты, показанные на фиг. 1-6 и 8, которые могут выполнять или участвовать в этапах иллюстративного способа. Следует отметить, однако, что могут использоваться другие компоненты; то есть, показанный иллюстративный способ (способы) не ограничены выполнением посредством идентифицированных компонентов. Описанные ниже этапы могут автоматически выполняться с использованием процессора, такого как процессор 886 (фиг. 8, описанный ниже), например, в контроллере 210 топологии (фиг. 2).
[0053] На этапе 710, запрос, например, запрос идентификации, передается вдоль телеметрической линии 315 связи (фиг. 3) расстановки сейсмического обнаружения. Телеметрическая линия 315 связи соединяет множество идентифицируемых элементов расстановки сейсмического обнаружения в ряду и каждый из идентифицируемых элементов включает в себя блок 256 идентификации (фиг. 2), сконфигурированный с возможностью передавать соответствующий идентификатор. Признак "ряд" указывает на тот факт, что идентифицируемые элементы соединены в порядке вдоль телеметрической линии 315 связи, и что два последовательных идентифицируемых элемента ряда могут быть смежными на телеметрической линии 315 связи или могут иметь любое количество неидентифицируемых элементов на телеметрической линии 315 связи между ними.
[0054] На этапе 720, либо соответствующий идентификатор одного из идентифицируемого элемента (элементов) принимается, либо делается определение того, что никакой идентификатор не был принят. За этапом 720 может следовать этап 730 принятия решения. Этап 720 может включать в себя этап 725 или этап 770 принятия решения.
[0055] В аспектах, использующих идентифицируемые активные элементы, например, как отмечено ниже со ссылкой на этапы 760, 765, этап обнаружения может включать в себя или прием соответствующего идентификатора активного одного из идентифицируемых элементов (в противоположность или в дополнение к идентификатору пассивного элемента), или определение того, что никакой идентификатор не был принят.
[0056] На этапе 725, принятые соответствующие идентификаторы сохраняются, например, в базе данных. Она может быть базой 310 данных оборудования (фиг. 3) или другим устройством или системой, описанной ниже со ссылкой на систему 840 хранения данных (фиг. 8). Другие данные элемента также могут храниться совместно с принятыми идентификаторами.
[0057] На этапе 730 принятия решения, определяется, удовлетворяется ли выбранный критерий прекращения, например, был ли принят ID хвостового буя 234. Если это так, следующим этапом является этап 740. Если нет, следующим этапом является этап 710. Этим способом, этап 710 передачи и этап 720 обнаружения повторяются до тех пор, когда выбранный критерий прекращения будет удовлетворяться. В одном примере, критерием прекращения может быть прохождение выбранного времени после передачи запроса (этап 710), при этом в течение выбранного времени никакой идентификатор не был принят. В другом примере, критерием прекращения может быть прием полного набора идентификаторов, перечисленных в базе 310 данных оборудования (фиг. 3), которые являются частью сейсмоприемной косы 106.
[0058] На этапе 740, с использованием процессора, такого как процессор 886 (фиг. 8), автоматически определяется компоновка идентифицируемых элементов расстановки сейсмического обнаружения. Например, принятые идентификаторы, сохраненные (этап 725) в базе 310 данных оборудования (фиг. 3), могут располагаться в порядке положения на сейсмоприемной косе.
[0059] На этапе 750, с использованием процессора, автоматически представляется индикация определенной компоновки. Например, визуальное представление, такое как список или график компоновки, может представляться системе 830 пользовательского интерфейса (фиг. 8). В различных аспектах, за этапом 750 следует этап 760.
[0060] На этапе 760, запрос данных передается вдоль телеметрической линии 315 связи. Запрос данных обеспечивает сейсмические данные от датчиков 225 в активных секциях 224 (оба на фиг. 2B). За этапом 760 следует этап 765.
[0061] На этапе 765, сейсмические данные принимаются от активного элемента из множества элементов. В различных аспектах, элемент, обеспечивающий сейсмические данные, является идентифицируемым элементом; в других аспектах, элемент, обеспечивающий сейсмические данные, не является идентифицируемым элементом.
[0062] Этим способом, топология (компоновка идентифицируемых элементов) сейсмоприемной косы или другой расстановки сейсмического обнаружения может автоматически определяться, даже если сейсмоприемная коса либо развернута, либо намотана на лебедку. Различные аспекты дополнительно обеспечивают прием сейсмических данных, как отмечено выше. Различные аспекты обеспечивают представление неисправностей, например, поломок в сейсмоприемной косе или отказов компонентов сейсмоприемной косы. В этих аспектах, этап 720 включает в себя этап 770 принятия решения.
[0063] На этапе 770 принятия решения, определяется (например, посредством процессора 886, фиг. 8), был ли принят идентификатор идентифицируемого элемента в ответ на запрос, переданный на этапе 710. Если это так, следующим этапом является этап 730 принятия решения, как описано выше. Если нет, следующим этапом является этап 775 или этап 790. Этапы 775, 780, 785, и 790 являются частями этапа представления индикации неисправности согласно различным аспектам.
[0064] На этапе 775, местоположение неисправности расстановки сейсмического обнаружения автоматически определяется с использованием процессора 886. За этапом 775 может следовать этап 790 и может включать в себя этап 780 или этап 785. Индикация неисправности может соответствовать запросу (этапу 710), в ответ на который никакой идентификатор не был принят, то есть той части расстановки сейсмического обнаружения, которая не находится в связи с контроллером 210 топологии (фиг. 2). Также или альтернативно, индикация неисправности может соответствовать наиболее недавнему принятому соответствующему идентификатору, то есть той части расстановки сейсмического обнаружения, которая не находится в связи с контроллером 210 топологии. Так как индивидуальный элемент может быть достаточно длинным (например, 50 м для активной секции 224, фиг. 2), местоположение неисправности может определяться согласно потребностям конкретного сейсмического обследования.
[0065] На этапе 780, соответствующие данные элемента для каждого из сохраненных идентификаторов извлекаются из базы данных. Например, данные элемента могут включать в себя идентификаторы, сохраненные на этапе 725. Местоположение неисправности затем определяется с использованием извлеченных данных элемента. В одном примере, данные элемента включают в себя положения на сейсмоприемной косе (описанные выше со ссылкой на фиг. 3), для которых идентификатор был принят на этапе 720. Может определяться, что неисправность должна быть после положения с наивысшим номером на сейсмоприемной косе, сохраненного в базе данных, то есть положения с наивысшим номером на сейсмоприемной косе, для которого идентификатор был принят.
[0066] В другом примере, соответствующие данные элемента включают в себя соответствующие данные длины элемента. Например, данные длины элемента могут показывать, сколько метров в длину имеет каждый идентифицируемый элемент, на основе его соответствующего идентификатора (идентификаторов). Этап определения местоположения неисправности может включать в себя суммирование соответствующих данных длины элемента для каждого из сохраненных идентификаторов, то есть каждого из принятых идентификаторов, и обеспечение суммы в качестве определенного местоположения неисправности. Это может обеспечивать, например, физическое местоположение на развернутой сейсмоприемной косе, к которому рабочий катер может посылаться, чтобы устранять неисправность.
[0067] Этап 785 относится к различным аспектам, в которых, по меньшей мере, один пассивный элемент из идентифицируемых элементов включает в себя два конца, имеющие соответствующие идентификаторы. Один пример показан на фиг. 5B. Например, идентифицируемый элемент 410 имеет блоки IDU 256A, 256B (вся фиг. 5B) на каждом конце. На этапе 785, автоматически определяется, сколько из двух идентификаторов соответствующих концов упомянутого, по меньшей мере, одного пассивного элемента были приняты. Соответствующая индикация неисправности может затем представляться (на этапе 790) с более тонким разрешением, чем уровень элемента.
[0068] На этапе 790, в различных аспектах, процессор 886 автоматически представляет индикацию неисправности. Как отмечено выше, индикация неисправности может соответствовать запросу (этапу 710), в ответ на который никакой идентификатор не был принят, или наиболее недавнему принятому соответствующему идентификатору. В одном примере, этап 790 представления индикации неисправности включает в себя передачу индикации неисправности посредством сети 850 (фиг. 8).
[0069] Этап 790 может включать в себя, например, автоматическое представление визуальной индикации определенного местоположения неисправности на экране устройства отображения, например, устройстве 835 отображения (фиг. 8), с использованием процессора 886. Определенное местоположение неисправности может отображаться как номер элемента, расстояние в метрах вдоль сейсмоприемной косы, или в других формах. Например, контроллер 210 топологии может быть соединен с возможностью передачи данных с интегрированной навигационной системой (INS), чтобы принимать координаты и ориентацию сейсмоприемной косы, которая буксируется. Этим способом, местоположение неисправности в метрах вдоль сейсмоприемной косы может преобразовываться в широту и долготу местоположения неисправности. Это обеспечивает возможность отправки рабочего катера в это местоположение. Местоположение неисправности также может представляться как схематическое представление, например, пиктограмма неисправности, наложенная на отображение, аналогично тому, как на фиг. 2A.
[0070] В различных аспектах, этап 790 представления индикации неисправности включает в себя, с использованием процессора, автоматическое представление визуальной индикации данных элемента, сохраненных на этапе 725, на экране устройства отображения, таком как устройство 835 отображения. Например, может представляться информация об обнаруженном последнем элементе, или первом не обнаруженном элементе. В одном примере, информация представляется как текст, например, "никакой идентификатор не был принят из положения 5; пилообразный сигнал в положении 4: тип=морской модуль, последовательный номер=42", где тип и последовательный номер извлекаются из сохраненных данных элемента.
[0071] В аспектах, использующих этап 785 (пассивные элементы с двумя идентификаторами, например, как показано на фиг. 5B), этап 790 может включать в себя представление индикации неисправности, соответствующей определенному местоположению неисправности, и определяться следующим образом: (a) если никакой из упомянутых двух идентификаторов не был принят, индикация неисправности показывает, что неисправность находится выше упомянутого, по меньшей мере, одного пассивного элемента; (b) если один из двух идентификаторов был принят, индикация неисправности показывает, что неисправность находится в упомянутом, по меньшей мере, одном пассивном элементе; и (c) если оба из упомянутых двух идентификаторов были приняты, индикация неисправности показывает, что неисправность находится ниже упомянутого, по меньшей мере, одного пассивного элемента. Как показано на фиг. 5B, в одном примере, элемент 412 является пассивным идентифицируемым элементом. Если (a) ни идентификатор блока IDU 256E, и ни идентификатор блока IDU 256F не принят, индикация неисправности может показывать, что неисправность находится выше элемента 412, например, в элементе 410 или 411. Если (b) идентификатор блока IDU 256E принят, но идентификатор блока IDU 256F не принят, индикация неисправности может показывать, что неисправность располагается в элементе 412. Если (c) идентификаторы обоих блоков IDU 256E, 256F приняты, индикация неисправности может показывать, что неисправность находится ниже элемента 412.
[0072] Фиг. 8 является высокоуровневой диаграммой, показывающей компоненты системы обработки данных, включающей в себя процессор 886, соединенный с периферийной системой 820, системой 830 пользовательского интерфейса, и системой 840 хранения данных. Процессор 886 может быть соединен с возможностью передачи данных с сетью 850 (показана пунктиром). Устройства 130 (фиг. 1), 210, 211, 256, 220, 224, 230, 234 (фиг. 2A), 225 (фиг. 2B), 310, 312, 320, 321, 322, 356, 357, 358, 359 (фиг. 3), 102, 411, 225A, 225B, 225C, 225D (фиг. 4), или 256A, 256B, 256C, 256D, 256E, 256F, 256G, или 256H (фиг. 5B) могут, каждое, включать в себя одну или более из систем 886, 820, 830, 840, и могут, каждое, соединяться с одной или более сетью (сетями) 850. Процессор 886 может включать в себя один или более микропроцессоров, микроконтроллеров, программируемых пользователем вентильных матриц, специализированных интегральных схем, программируемых логических устройств (PLD), или цифровых сигнальных процессоров. В одном аспекте, системы 886, 820, 830, 840 осуществляются в компьютере, расположенном на судне 102 или рабочем катере, и процессор 886 соединен с аналогичной системой обработки данных на другом судне 102 или рабочем катере (указанном собирательно посредством ссылочной позиции 802) посредством сети 850 или другой линии передачи данных.
[0073] В одном примере, система 840 хранения данных включает в себя память 841, например, оперативное запоминающее устройство (RAM), и диск 843, например, материальное машиночитаемое запоминающее устройство, такое как накопитель на жестких дисках, гибкий диск, компакт-диск, DVD, постоянное запоминающее устройство (ROM), или стираемое программируемое постоянное запоминающее устройство (EPROM, EEPROM, или флэш-устройство). Компьютерные программные инструкции считываются в память 841 из диска 843. Процессор 886 затем выполняет одну или более последовательностей компьютерных программных инструкций, загруженных в память 841, как результат выполнения этапов обработки, здесь описанных. Этим способом, процессор 886 выполняет компьютерно-реализуемую обработку. Например, этапы способов, здесь описанных, или блоки иллюстраций блок-схем последовательности операций (например, фиг. 7) или блок-схемы здесь могут осуществляться посредством компьютерных программных инструкций. Память 841 также может хранить данные, например, данные местоположений компонентов сейсмоприемной косы или другие данные, описанные выше со ссылкой на базу 310 данных оборудования (фиг. 3).
[0074] Периферийная система 820 может включать в себя одно или более устройств, сконфигурированных с возможностью передавать данные между процессором 886 и другими системами. Например, периферийная система 820 может принимать данные от приемников 140 (фиг. 1) или может принимать идентификационные данные от блоков IDU 256 или других компонентов, показанных на фиг. 2A-2B. Процессор 886, при приеме данных от периферийной системы 820, может сохранять такие данные в системе 840 хранения данных. Например, контроллер 210 топологии (фиг. 2A) может включать в себя процессор 886 и периферийную систему 820, соединенную с телеметрической линией 315 связи сейсмоприемной косы 106, как показано. Регистратор211 данных (фиг. 2A) также может включать в себя соответствующий процессор 886 и соответствующую периферийную систему 820, соединенную с телеметрической линией 315 связи.
[0075] Система 830 пользовательского интерфейса может включать в себя мышь, клавиатуру, устройство 835 отображения, сенсорный экран, или другие устройства для передачи данных между процессором 886 и пользователем 838 (показан пунктиром). В различных вариантах осуществления, процессор 886 дополнительно сконфигурирован с возможностью представлять визуальное представление компонентов сейсмоприемной косы 106 и их топологию (например, относительные местоположения) пользователю 838 посредством устройства 835 отображения, например, устройства отображения CRT, LCD, или OLED.
[0076] В различных вариантах осуществления, процессор 886 соединен с сетью 850 посредством интерфейса 815 связи (оба показаны пунктиром). Например, интерфейс 815 связи может включать в себя радиопередачу посредством беспроводной линии связи. Интерфейс 815 связи посылает и принимает электрические, электромагнитные или оптические сигналы, которые переносят цифровые или аналоговые потоки данных, представляющие различные типы информации, в и из сети 850. Процессор 886 может посылать сообщения и принимать данные или программный код посредством сети 850 и интерфейса 815 связи.
[0077] Различные варианты осуществления здесь включают в себя компьютерные программные продукты, имеющие компьютерные программные инструкции, сохраненные на материальном, нетранзиторном машиночитаемом носителе, например, диске 843. Такой носитель может изготовляться, как является обычным для таких предметов, например, посредством штамповки CD-ROM или записи образа диска на накопитель на жестких дисках. Когда сохраненные инструкции исполняются процессором 886, эти инструкции предписывают процессору 886 выполнять функции, действия, или рабочие этапы различных вариантов осуществления отсюда, например, как описано выше со ссылкой на фиг. 2A и 7.
[0078] Согласно предшествующему, различные аспекты обеспечивают идентификацию элементов сейсмоприемной косы в отношении того, являются ли эти элементы активными или пассивными. Технический эффект различных аспектов состоит в том, чтобы передавать сигналы в блоки IDU 256 на сейсмоприемной косе 106 (оба на фиг. 2A) и принимать идентификационную информацию. Дополнительный технический эффект состоит в том, чтобы представлять на электронном устройстве отображения визуальное представление топологии сейсмоприемной косы 106, например, порядка и типа элементов на сейсмоприемной косе 106.
[0079] Различные аспекты предпочтительно определяют и отслеживают топологию, так что персонал обследования освобождается от необходимости записывать то, что физически находится на сейсмической расстановки, и отслеживать это, когда расстановка развертывается или восстанавливается. Это уменьшает вероятность ошибочных результатов, время простоя, или другие отрицательные последствия, которые могут проистекать из человеческой ошибки. Различные аспекты предпочтительно обеспечивают возможность оператору обследования надежно определять в любое время то, что физически подсоединено к сейсмической расстановке.
[0080] Различные аспекты предпочтительно обеспечивают возможность просмотра топологии независимо от физического расположения сейсмоприемной косы или другого сейсмического профиля. Даже когда сейсмическая расстановка хранится на лебедке или сложен на полу, пользователь может подсоединять контроллер 210 топологии (фиг. 2A) или другую определяющую топологию подсистему к сейсмической расстановке и напрямую просматривать топологию. Это обеспечивает возможность подтверждения того, что требуемое оборудование присутствует на сейсмоприемной косе, уменьшая необходимость выполнять операции ручного манипулирования, чтобы определять содержимое сейсмоприемной косы. Уменьшение в ручном манипулировании сейсмоприемной косой также может улучшать безопасность работников.
[0081] В различных аспектах, определяющая топологию подсистема осуществляет связь с базой данных оборудования, чтобы улучшать логистику оборудования на борту сейсмического судна. Например, анализ данных топологии со временем может обеспечивать возможность более точного предсказания, когда будет требоваться ремонт или предупредительное обслуживание должно выполняться.
[0082] Как отмечено выше, в схемах предшествующего уровня техники, когда несколько пассивных секций последовательно соединены и происходит отказ телеметрии, может быть трудным определять местонахождение неисправности, кроме как отсоединяя и тестируя секции одну за одной. Различные аспекты предпочтительно облегчают поиск неисправности. При использовании блоков IDU, если происходит отказ телеметрии, и секция, требующая обслуживания, может легко идентифицироваться, как, например, секция, содержащая или немедленно следующая за наиболее верхним IDU, который должен ответить.
[0083] Различные аспекты предпочтительно включают в себя подсистему определения топологии, имеющую интерфейс с навигационной или топографической системой, чтобы давать линейное смещение для каждого элемента. Это было описано выше со ссылкой на фиг. 4 и 7.
[0084] Следует понимать, что не предполагается, что это описание ограничивает изобретение. Наоборот, предполагается, что иллюстративные варианты осуществления охватывают альтернативы, модификации и эквиваленты, которые включены в сущность и объем изобретения. Дополнительно, в подробном описании иллюстративных вариантов осуществления, многочисленные конкретные детали изложены, чтобы обеспечивать полное понимание заявленного изобретения. Однако специалист в данной области техники должен понимать, что различные варианты осуществления могут применяться на практике без таких конкретных деталей.
[0085] Хотя признаки и элементы представленных иллюстративных вариантов осуществления описаны в вариантах осуществления, в частности, комбинациях, каждый признак или элемент может использоваться одиночно без других признаков и элементов вариантов осуществления или в различных комбинациях с или без других признаков и элементов, здесь раскрытых.
[0086] Это письменное описание использует примеры раскрытой сущности, чтобы обеспечивать возможность любому специалисту в данной области техники применять на практике то же, включая сюда осуществление и использование любых устройств или систем и выполнение любых введенных способов. Патентоспособный объем сущности может включать в себя другие примеры, которые встречаются специалистам в данной области техники. Предполагается, что такие другие примеры находятся в пределах объема формулы изобретения.
Модуль сбора данных и кабельный соединитель
Способ и устройство для автоматического обнаружения морских животных
Судовое устройство
Способ и устройство передачи данных из скважины
Соединительное устройство для сейсмических датчиков
Устройство сбора данных, снабженное средством обнаружения отключения набора, состоящего по меньшей мере из одного аналогового сейсмического датчика
Способ установки частотных каналов в многоскачковой беспроводной ячеистой сети
Контроль качества для широкополосных свип-сигналов
Способ синхронизации в системе сбора данных
Способ сбора в накопительном устройстве, отличном от центральной станции, данных, поступающих от нескольких устройств сбора сейсмических данных
Судовое устройство

