Результат интеллектуальной деятельности: СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД САМОЛЕТА-ГЕНЕРАТОРА ВИХРЕЙ
Вид РИД
Изобретение
Предлагаемое изобретение относится к авиационной технике, области обеспечения безопасности эксплуатации летательных аппаратов и может быть использовано для информирования пилотов пассажирских самолетов о возможности попадании летательного аппарата (ЛА) в опасную вихревую зону (ОВЗ) следа самолета-генератора вихрей на режимах крейсерского полета и формировании маневра уклонения с использованием элементов директорной информации.
Обеспечение вихревой безопасности полетов летательных аппаратов является актуальной проблемой. Рост авиационных грузоперевозок в мире приводит к увеличению количества самолетов, находящихся одновременно в ограниченной области воздушного пространства. При этом увеличивается вероятность опасного сближения воздушных судов. Опасность представляет не только непосредственное столкновение, но и попадание самолета в зону возмущенного потока от другого самолета. При полете в атмосфере самолет создает за собой вихревой след, сворачивающийся в пару мощных вихрей противоположного вращения. Вихревой след долго сохраняется в атмосфере и представляет реальную опасность для самолета, попадающего в него. Для современных сверхтяжелых пассажирских самолетов вихревой след сохраняет свою опасность на расстоянии до 20-40 км за самолетом и может опускаться ниже самолета его породившего на 200-300 метров. Формирование и эволюция вихревого следа за самолетом показана в Приложении на фиг. 1. Известны случаи авиационных катастроф и происшествий по причине попадания самолета в опасную вихревую зону следа как на режимах взлета и посадки, так и на режиме крейсерского полета. Проблема вихревых следов является актуальной для гражданской авиации с точки зрения, как безопасности полетов, так и пропускной способности воздушного пространства и экономики воздушно-транспортной системы. Нормы ИКАО определяют вертикальное эшелонирование самолетов при полете на маршруте. Необходимость увеличения пропускной способности воздушных трасс привела к введению 6 дополнительных эшелонов полета (программа RVSM по сокращению интервалов вертикального эшелонирования) и введению на некоторых высотах полета минимума вертикального эшелонирования 1000 футов вместо традиционных 2000 футов. Однако практика полетов в условиях RVSM показала, что близость траекторий воздушных судов по высоте привела к увеличению докладов пилотов о турбулентности в вихревом следе. По данным NATS (провайдер аэронавигационных услуг Великобритании), частота входов в вихревые следы увеличилась с 1,8 до 6,2 раз на 100 тыс.часов полета. Кроме того, в настоящее время небольшие административные самолеты оснащаются турбореактивными двигателями, и их крейсерские высоты полетов совпадают с высотами полетов магистральных пассажирских самолетов, что приводит к летным происшествиям. Например, авиационные органы Омана сообщили об инциденте, произошедшем 7-го января 2017 года с участием авиалайнера A380, который летел на высоте 11 км, и бизнес-джета Challenger 604, летевшего на 300 м ниже. Небольшой бизнес-джет едва не разбился, попав в вихревой след от A380. Самолет, на борту которого было 9 человек, находился на маршруте над Аравийским морем, когда экипаж увидел Airbus A380-800, проходивший на 300 м выше. После прохождения под A380 экипаж потерял управление воздушным судном в результате входа в вихревой след от A380. Попадание самолета в вихревой след привело к неуправляемому крену и сваливанию. В процессе падения произошло отключение автопилота и останов двигателя. Самолет во время падения совершил несколько переворотов вокруг продольной оси. После трехкилометрового свободного падения экипаж сумел восстановить управление и перезапустить двигатели. Некоторые из находившихся на борту людей получили травмы. После того как экипажу удалось стабилизировать воздушное судно, экипаж принял решение уйти на запасной аэродром в ручном режиме пилотирования. Самолет получил сильные деформации планера и восстановлению не подлежит. Таким образом, необходимость исследований в данной области продиктована двумя причинами -требованиями безопасности полетов и экономическими факторами, обусловленными ограничениями пропускной способности. Для повышения пропускной способности ИКАО рассматривает перспективные подходы, основанные на динамичном управлении минимумами эшелонирования с учетом турбулентности в вихревом следе на основе идентификации опасности попадания в опасную вихревую зону след в реальном масштабе времени. Одним из путей повышения безопасности полета является предоставление пилоту в реальном масштабе времени информации о прогнозируемом положении опасных вихревых зон, попадание в которые может привести к летному происшествию, и создание систем, облегчающих формирование маневра уклонения от опасной зоны.
Известен способ, реализованный в системе предупреждения о турбулентности следа, предназначенной для размещения на борту летательных аппаратов, предусматривающей информирование экипажа летательного аппарата о потенциальном входе в вихревой след другого летательного аппарата только тогда, когда система определит, что вход указанного летательного аппарата в вихревой след другого летательного аппарата произойдет через определенный заданный промежуток времени (US 6177888, А). При этом способ предусматривает взаимодействие этих летательных аппаратов между собой, обмен предупреждающими сигналами и информацией о высоте полета, дистанции и пеленге, отслеживание траектории полета объема вихревого следа с учетом местной скорости ветра и имеет возможность определять расстояние или время до входа летательного аппарата в объем вихревого следа другого летательного аппарата. Способ обеспечивает индикацию о близости к объему вихревого следа, когда расстояние или время до такого входа становится меньше заданного порога. При этом ширину и высоту объема вихревого следа вычисляют в каждой точке из множества точек вдоль траектории вихревого следа в виде функции расстояния от указанной точки до соседнего летательного аппарата. Однако такой способ не решает задачи информирования пилота о степени опасности попадания в выявленные вихревые следы и о рациональном маневре летательного аппарата для исключения попадания в вихревой след.
Известен способ (патент РФ №2477893 С1 с приоритетом от 30.09.2011, МПК: G08G 5/02)) обеспечения вихревой безопасности полета летательного аппарата (ЛА), включающий передачу ЛА-генератором вихревого следа информации о создаваемом им вихревом следе, скорости полета, координатах, времени передачи путем радиосвязи "борт-борт" в радиовещательном режиме и/или в режиме "точка-точка" и последующий прием этой информации ЛА-абонентом или ЛА-абонентами, причем ЛА-абонент производит текущие, соответствующие параметрам приходящего к нему вихревого следа от ЛА-генератора вихревого следа, расчеты величины действующего на него возмущающего момента крена и измерения вихревой обстановки перед ЛА-абонентом, по результатам которых также проводит расчеты возмущающего момента крена, а затем производит сравнение величин возмущающего момента крена, рассчитанных по результатам этих измерений, с величинами возмущающего момента крена, полученных расчетом на основании переданной информации с ЛА-генератора вихревого следа, при этом требуемые для определения вихревой обстановки перед ЛА-абонентом данные получают путем измерений с помощью датчиков статического давления, устанавливаемых в передних "критических" точках его крыльев, причем наибольшее из вычисленных значений возмущающего момента крена выбирают как ожидаемое воздействие вихревого следа на ЛА-абонент и выбранную величину в качестве корректирующей вводят в систему управления ЛА-абонента. Однако такой способ не решает проблемы информирования летчиков о вихревой опасности на режимах крейсерского полета, т.к. типичные скорости полета на этих режимах составляют 220-240 м/с и запас по времени о возможном входе самолета в опасную зону будет настолько мал, что не позволит своевременно осуществить маневр уклонения. Кроме того, при пересечении вихревого следа под углами близкими к прямым момент крена практически не возникает.
Известен способ (патент РФ №2496121 С1 с приоритетом от 11.03.2012, МПК: G01S 13/08)) обеспечения вихревой безопасности полета летательного аппарата, характеризующийся осуществлением передачи данных «борт-борт» и «борт-система управления воздушным движением (УВД)» в радиовещательном режиме и/или в режиме «точка-точка» с передачей информации каждым ЛА (ЛА-генератором) о параметрах создаваемого им вихревого следа, получаемых путем измерений и/или расчета в самолетной системе координат ЛА-генератора, приемом этой информации каждым другим ЛА и/или системой УВД (далее абоненты), находящихся в зоне доступности передатчика соответствующего ЛА-генератора, последующим расчетом в системе координат ЛА-абонентов последствий воздействия вихревого следа и анализом этой информации ЛА-абонентами, причем в передаваемую информацию ЛА-генератора включают такие данные в самолетных координатах этого ЛА, как местоположение ЛА-генератора и категорию его передатчика, скорость и курс ЛА-генератора, его вес и время передачи им информации, данные турбулентности атмосферы, скорость и направление ветра, температуру и барометрическое давление, а принимающие информацию ЛА-абоненты оценивают возможность прохождения зоны создаваемого ЛА-генератором вихревого следа, и, в случае необходимости, проводят измерения характеристик атмосферы, и/или учитывают поступающие от системы УВД данные, необходимые для соответствующего расчета вихревого следа, и/или учитывают характеристики атмосферы с учетом изменчивости порывов ветра и/или турбулентности, при этом параметры вихревого следа определяют с учетом сноса вихревого следа, в том числе с учетом влияния стохастических атмосферных воздействий, например, порывов ветра и/или турбулентности. Однако представленный способ ограничен только передачей информации о параметрах опасной вихревой зоны и не решает задачи информирования пилота о степени опасности попадания в выявленные вихревые следы и о рациональном маневре летательного аппарата для исключения попадания в вихревой след. Кроме того, при определении размеров зоны, в которой могут находиться вихри, не учитывается "искривление" вихрей, обусловленное неустойчивостью Кроу [Crow, S. С., and Bate, Е. R., "Lifespan of Trailing Vortices in a Turbulent Atmosphere," Journal of Aircraft, Vol. 13, No. 7, 1976, pp. 476-482.], которая является основным фактором разрушения (ослабления) вихревого следа при малой степени турбулентности атмосферы, что характерно при полете на крейсерском режиме пассажирских самолетов.
Наиболее близким аналогом-прототипом является способ и система предупреждения о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей (см., например, патент РФ №2324203 с приоритетом от 25.07.2003, МПК: G01S 13/95), в котором:
- получают информацию о конфигурации, местонахождении и ориентации летательного аппарата относительно инерциальной системы координат в текущий момент времени;
- получают информацию о положении, геометрических и массовых характеристиках и о параметрах движения генератора вихрей относительно инерциальной системы координат в текущий момент времени;
- сохраняют информацию о положении и параметрах движения генератора вихрей в инерциальной системе координат;
- получают информацию о параметрах окружающей среды в области совместного размещения летательного аппарата и генератора вихрей в текущий момент времени;
- определяют траекторию вихревого следа генератора вихрей как совокупность траекторий центров областей завихренности, генерируемых указанным генератором вихрей, и интенсивность вихревого следа в инерциальной системе координат в текущий момент времени;
- сохраняют информацию о координатах точек траектории и об интенсивности вихревого следа как совокупности траекторий центров областей завихренности генератора вихрей в инерциальной системе координат;
- выбирают время упреждения, в течение которого возможно, по меньшей мере, выполнение маневра изменения траектории полета летательного аппарата, обеспечивающего уклонение летательного аппарата от опасной зоны вихревого следа генератора вихрей после предупреждения о возможности попадания в нее;
- вычисляют упреждающее расстояние, равное расстоянию, преодолеваемому летательным аппаратом за время упреждения, моделируют контрольную плоскость, расположенную в пространстве перед летальным аппаратом перпендикулярно направлению его движения на упреждающем расстоянии от летательного аппарата, и определяют прогнозируемый момент времени пролета летательного аппарата через указанную контрольную плоскость в инерциальной системе координат;
- определяют геометрические характеристики опасной зоны вихревого следа генератора вихрей как совокупности опасных зон областей завихренности, генерируемых указанным генератором вихрей, в прогнозируемый момент времени;
- определяют траекторию и интенсивность вихревого следа генератора вихрей как совокупность траекторий центров областей завихренности, генерируемых генератором вихрей, относительно инерциальной системы координат в прогнозируемый момент времени;
- определяют координаты точки пересечения траектории вихревого следа генератора вихрей с указанной контрольной плоскостью в прогнозируемый момент времени пролета летательного аппарата через нее;
- формируют вокруг указанной точки пересечения опасную зону вихревого следа как совокупность опасных зон областей завихренности, генерируемых указанным генератором, при попадании в которую у летательного аппарата параметры движения могут превысить допустимые пределы; формируют в указанной контрольной плоскости область прогнозируемых с учетом установленных нормативов производства полета положений летательного аппарата в прогнозируемый момент времени пересечения летательным аппаратом указанной контрольной плоскости формируют вокруг области прогнозируемых положений область повышенного внимания, информация о попадании в которую опасной зоны вихревого следа будет предоставлена пользователю;
- определяют координаты точек области прогнозируемых положений летательного аппарата, точек области повышенного внимания и точек опасной зоны вихревого следа в системе координат, связанной с летательным аппаратом;
- вычисляют расстояние от области повышенного внимания до опасной зоны вихревого следа;
- вычисляют расстояние от области прогнозируемых положений летательного аппарата до опасной зоны вихревого следа;
- осуществляют для пользователя индикацию события равенства нулю расстояния от области повышенного внимания до опасной зоны вихревого следа указанного генератора вихрей;
- осуществляют для пользователя аварийную индикацию события равенства нулю расстояния от области повышенного внимания до опасной зоны вихревого следа указанного генератора вихрей.
Данный известный способ обеспечивает информирование экипажа о возможности возникновения опасной ситуации. Однако, предлагаемые в способе операции определения упреждающего расстояния, моделирования контрольной плоскости, расположенной в пространстве перед летальным аппаратом перпендикулярно направлению его движения на упреждающем расстоянии от летательного аппарата, формирования области повышенного внимания, информация о попадании в которую опасной зоны вихревого следа будет предоставлена пользователю, рассчитаны в основном на взлетно-посадочные режимы, когда самолеты находятся в следе друг за другом. На крейсерских высотах траектория самолета может проходить ниже траектории самолета-генератора вихрей под углами, близкими к прямому, в этом случае нельзя определить координаты точки пересечения траектории вихревого следа генератора вихрей с указанной контрольной плоскостью в прогнозируемый момент времени пролета летательного аппарата через нее. Кроме того, в предлагаемом способе определяют траекторию и интенсивность вихревого следа генератора вихрей как совокупность траекторий центров областей завихренности, генерируемых генератором вихрей, и для определения фактической траектории центров областей завихренности необходимо проводить измерения полей скоростей перед самолетом на упреждающем расстоянии с помощью наземного или бортового измерительного оборудования. Для условий крейсерского полета выполнение таких измерений чрезвычайно затруднено из-за больших скоростей, высот и характерных дистанций. Расчетные методы в данном способе не позволяют однозначно определить траекторию и интенсивность вихревого следа генератора вихрей как совокупность траекторий центров областей завихренности, генерируемых генератором вихрей, так как эволюция вихревого следа в турбулентной атмосфере является стохастическим процессом. Необходимо также учитывать и неопределенность данных о самолете-генераторе следа, скорости ветра и поля скоростей атмосферной турбулентности. Таким образом, реально возможно лишь определение пространственной области, в которой с достаточно большой вероятностью (близкой к единице) находится вихревой след. Кроме того в предлагаемом способе решение о характере маневра ЛА, который приведет к выходу ЛА из области опасных вихревых следов, производится на основе оценки пилотом схемы расположения потенциально опасных зон на дисплее, что увеличивает пилотажную нагрузку на летчика, заставляя его решать задачу о выборе траектории облета опасной вихревой зоны, которая представляет собой трехмерный объект, перемещающийся в воздушном пространстве.
Технический результат заявленного способа состоит в снижении пилотажной нагрузки на летчика путем разработки способа информирования пилотов о возможности попадании летательного аппарата (ЛА) в опасную вихревую зону следа другого самолета-генератора вихрей на режимах крейсерского полета и формировании маневра уклонения с использованием элементов директорного управления за счет получения информации о типе самолета-генератора вихрей (от системы УВД и/или путем передачи "борт-борт"), о режиме и траектории полета, его полетном весе и информации о параметрах атмосферы (уровень и масштаб турбулентности, скорость и направление ветра) на высоте полета, определении на основе полученной информации в режиме реального времени геометрии опасной вихревой зоны, в котором с вероятностью, близкой к единице, располагается вихревой след от самолета-генератора вихрей. Формирование, на основе полученных от системы УВД (и/или путем передачи "борт-борт") и расчетных данных, визуальной информации, отображаемой на экранах штатных дисплеев, для предупреждения пилотов о возможном попадании летательного аппарата в опасные зоны вихревых следов генераторов-вихрей путем формирования информации об опасных зонах в одномерных и двумерных (не пространственных) визуальных форматах, соответствующих разделению пространственной картины воздушного пространства на горизонтальную и вертикальную составляющие. Снижение пилотажной нагрузки на летчика и повышение надежности и безопасности выполнения маневра уклонения обеспечивает система на основе индикации с элементами директорной информации, которая во многом избавляет летчика от необходимости решать ментально сложные прогностические операции по формированию траектории полета ЛА относительно подвижного пространственного объекта сложной формы, каким является опасная вихревая зона.
Указанный технический результат достигается тем, что в способе предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей, получают информацию о конфигурации, местонахождении и ориентации летательного аппарата в текущий момент времени, получают информацию о положении, геометрических и массовых характеристиках и о параметрах движения самолета-генератора вихрей в текущий момент времени, получают информацию о параметрах окружающей среды в области размещения летательного аппарата и самолета-генератора вихрей в текущий момент времени, определяют геометрические характеристики опасной зоны вихревого следа, представляют визуальную информации экипажу о риске попадания в опасную зону одновременно в горизонтальной и вертикальной плоскостях, при этом на горизонтальном кадре показывают положение самолета-генератора вихрей и горизонтальное сечение опасной зоны вихревого следа на высоте полета летательного аппарата, а также прогнозируемую траекторию полета летательного аппарата в координатах, связанных с самолетом-генератором вихрей, на вертикальном кадре показывают сечение опасной зоны вихревого следа вертикальной цилиндрической поверхностью, проходящей через прогнозируемую траекторию полета летательного аппарата, определяют диапазоны контрольных параметров полета, которые ведут к попаданию летательного аппарата в опасную вихревую зону и представляют их на навигационном дисплее в виде директорной информации.
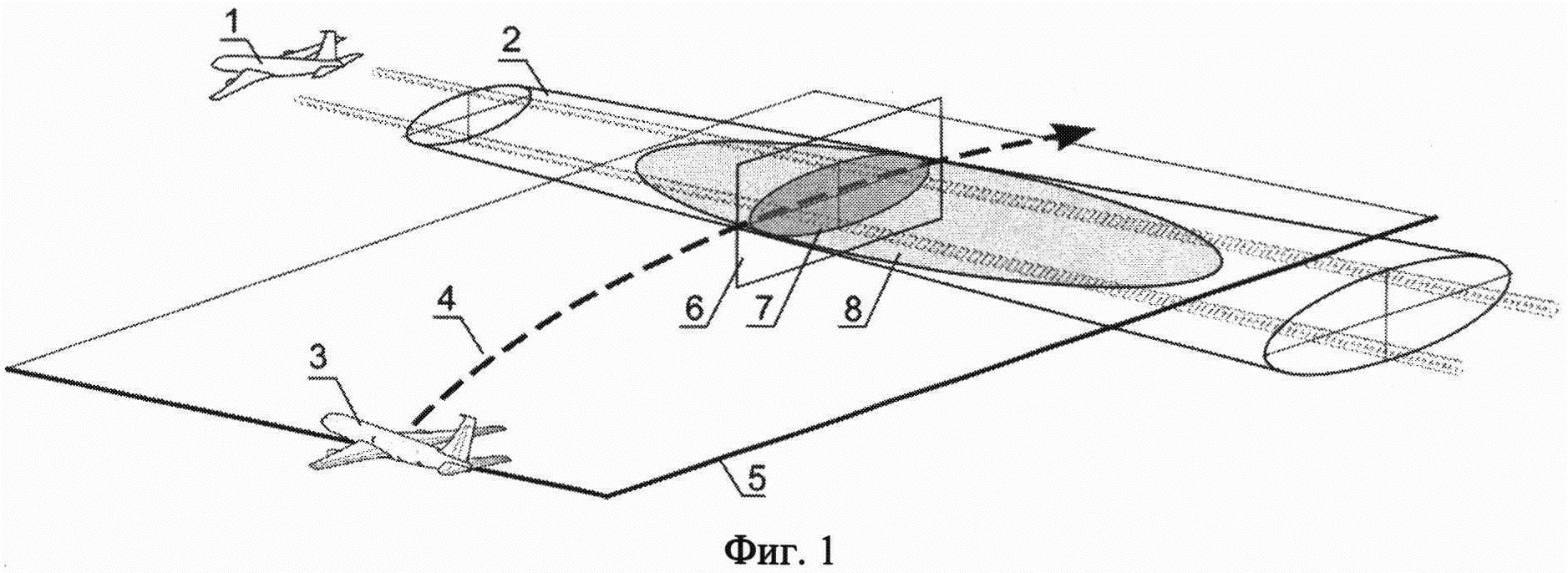
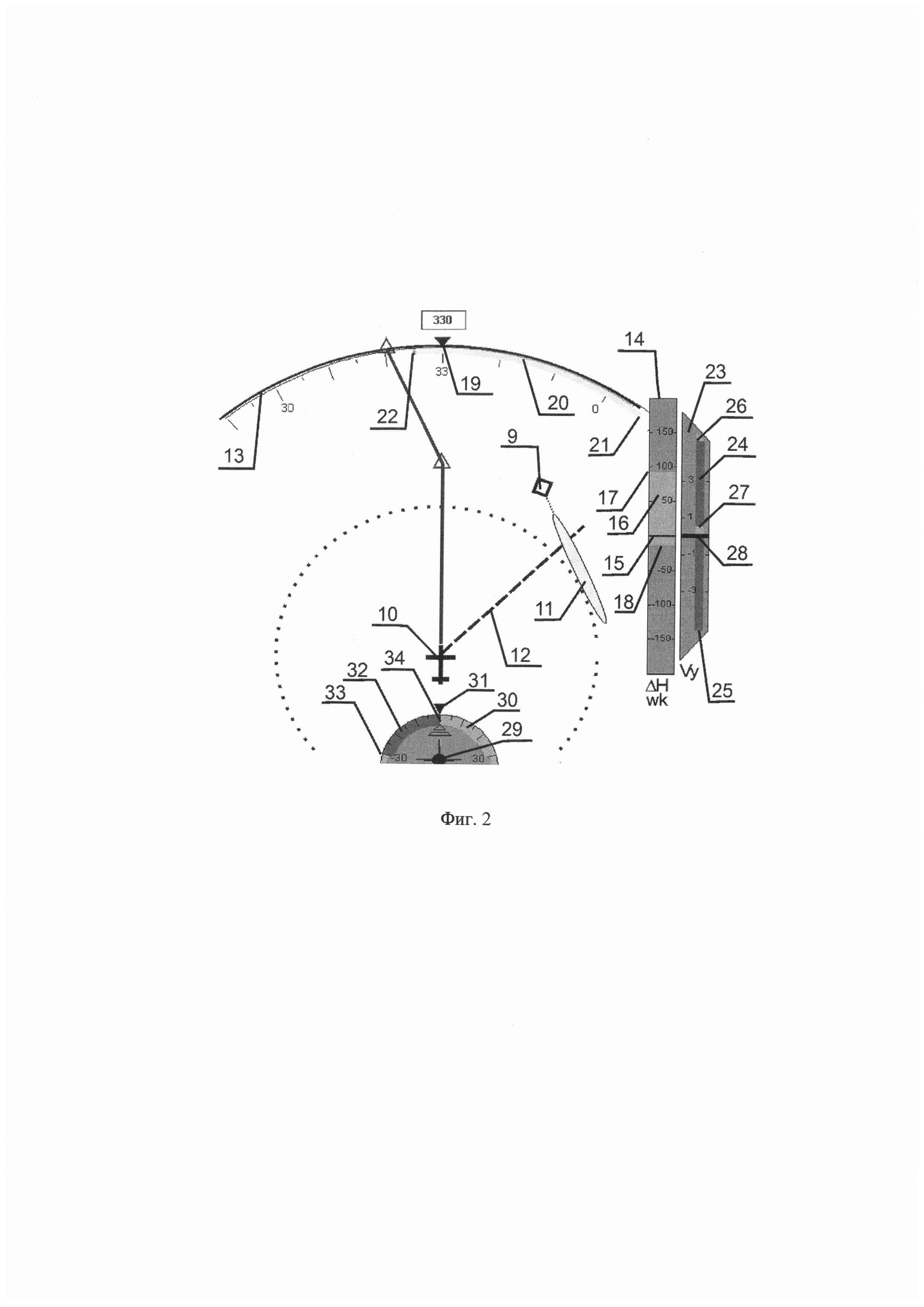
В дальнейшем способ поясняется прилагаемыми чертежами, на которых: на фиг. 1 приведена схематизация встречи летательного аппарата с вихревой зоной, на фиг. 2 показано отображение вихревой обстановки с элементами информации о значениях контрольных параметров полета, которые ведут к попаданию в опасную зону с использованием штатного навигационного дисплея.
На фиг. 1 показаны: 1 - самолет-генератор вихрей, 2 - опасная зона вихревого следа (содержащая вихри с вероятностью более 0.95), 3 - летательный аппарат (ЛА), 4 - прогнозируемая траектория ЛА (относительно самолета-генератора), 5 - горизонтальная плоскость на высоте полета ЛА, 6 - цилиндрическая вертикальная поверхность, проходящая через прогнозируемую траекторию ЛА 4, 7 - сечение опасной зоны вихревого следа 2 вертикальной цилиндрической поверхностью 6, 8 - сечение опасной зоны вихревого следа 2 горизонтальной плоскостью 5.
На фиг. 2 показаны: 9 - маркер самолета-генератора (подвижный) в текущий момент времени; 10 - маркер ЛА (неподвижный); 11 - фигура (подвижная) горизонтального сечения опасной зоны вихревого следа; 12 - горизонтальный след (подвижный) прогнозируемой траектории сближения ЛА с опасной зоной вихревого следа; 13 - шкала углов курса полета ЛА; 14 - шкала отклонений по вертикали относительно текущей высоты полета ЛА; 15 - нулевая отметка (неподвижная), показывающая текущее положение ЛА по высоте; 16 - подвижный сегмент, показывающий размах по высоте вертикального сечения опасной зоны вихревого следа при полете ЛА по прогнозируемой траектории сближения (12); 17 - верхняя граница (подвижная) вертикального сечения опасной зоны вихревого следа, отсчитываемая от текущей высоты полета ЛА; 18 - нижняя граница (подвижная) вертикального сечения опасной зоны вихревого следа, отсчитываемая от текущей высоты полета ЛА; 19 - указатель текущего курса ЛА; 20 - подвижный сегмент запретных углов курса ЛА; 21 и 22 - границы сегмента запретных углов курса ЛА; 23 - шкала вертикальных скоростей; 24 - подвижный сегмент запретных значений текущей вертикальной скорости; 25 и 26 - нижняя и верхняя границы сегмента запретных вертикальных скоростей; 27 - подвижный маркер текущего значение вертикальной скорости ЛА; 28 - нулевая отметка вертикальной скорости  ; 29 - поперечный профиль ЛА (подвижный); 30 - круговая шкала углов крена; 31 - отметка нулевого крена (γ=0); 32 - подвижный сектор запретных углов крена; 33 и 34 - границы сектора запретных углов крена.
; 29 - поперечный профиль ЛА (подвижный); 30 - круговая шкала углов крена; 31 - отметка нулевого крена (γ=0); 32 - подвижный сектор запретных углов крена; 33 и 34 - границы сектора запретных углов крена.
Способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей на режимах крейсерского полета осуществляется следующим образом. Получают информацию о конфигурации, местонахождении и ориентации летательного аппарата 3 в текущий момент времени. Получают информацию о типе самолета-генератора вихрей 1 (от системы УВД и/или путем передачи "борт-борт"), его полетном весе, получают информацию о режиме полета (скорость, высота), траектории полета, получают и/или измеряют с помощью бортовой аппаратуры текущие параметры атмосферы: уровень и масштаб турбулентности, скорость и направление ветра на высоте полета. Определяют, на основе полученной информации с помощью методов, основанных на использовании предварительно обученных искусственных нейронных сетей (ИНС, см. Приложение), в режиме реального времени геометрию области опасной зоны вихревого следа 2 (по основным параметрам эволюции вихревого следа), в которой, с вероятностью близкой к единице (более 0.95), располагается вихревой след от самолета-генератора вихрей и параметры вихрей в сечениях опасной зоны вихревого следа в зависимости от расстояния до самолета-генератора. Представляют визуальную информацию экипажу о вихревой опасности определенным образом сформированными кадрами по горизонтали и вертикали, что соответствует стереотипу пилотирования на крейсерских режимах полета и удобно при формировании маневра уклонения от встречи с вихревой зоной, т.е. рассматривают информацию только в 2-х плоскостях. Формируют горизонтальный кадр сечением воздушного пространства на высоте полета летательного аппарата 8, что является естественным для крейсерских режимов полета, обычно выполняемых на постоянной высоте, кадр показывает положение генератора вихрей 9 и горизонтальное сечение опасной зоны вихревого следа 11, а также прогнозируемую траекторию движения летательного аппарата 12. Формируют вертикальный кадр сечением опасной вихревой зоны 2 следа цилиндрической поверхностью 6 образованной вертикальными направляющими (прямыми), проходящими через прогнозируемую траекторию полета летательного аппарата 4, что позволяет мгновенно оценить возможность попадания ЛА в интервал высот, содержащих вихревой след. Определяют в координатах, связанных с генератором вихрей траекторию сближения с опасной зоной вихревого следа 12 и отображают проекцию на горизонтальное сечение опасной зоны вихревого следа в относительных координатах, связанных с самолетом-генератором вихрей. Определяют запретные области контрольных параметров полета 20, 21, 22, 24, 32 (запретными являются те значения контрольных параметров, которые ведут к попаданию ЛА в опасную вихревую зону) путем регулярного расчетного прогнозирования и отображают их летчику на соответствующих индикаторах. В результате в каждый текущий момент времени летчик информирован о том, попадет ли в дальнейшем полете его ЛА в опасную вихревую зону или не попадет. Таким образом, тактика уклонения от попадания в опасную вихревую зону становится очень простой - летчику в каждый момент времени достаточно удерживать контрольные параметры движения ЛА вне запретных областей. В качестве контрольных параметров приняты углы курса ψ и крена γ (для маневра по горизонтали), высота Н и вертикальная скорость  (для маневра по вертикали). Описание формирования отображения опасных вихревых зон и директорной информации на пилотажном дисплее приведено в Приложении.
(для маневра по вертикали). Описание формирования отображения опасных вихревых зон и директорной информации на пилотажном дисплее приведено в Приложении.
Апробация с участием летчиков на пилотажном стенде ЦАГИ подтвердила достижение технического результата заявленного способа, заключающегося в снижении пилотажной нагрузки на летчика и повышении надежности и безопасности выполнения маневра уклонения от опасной вихревой зоны на основе индикации с элементами директорной информации, которая во многом избавляет летчика от необходимости решать ментально сложные прогностические операции по формированию траектории полета относительно подвижного пространственного объекта.
Способ предупреждения попадания летательного аппарата в вихревой след самолета-генератора вихрей, в котором получают информацию о конфигурации, местонахождении и ориентации летательного аппарата в текущий момент времени, получают информацию о положении, геометрических и массовых характеристиках и о параметрах движения самолета-генератора вихрей в текущий момент времени, получают информацию о параметрах окружающей среды в текущий момент времени в области размещения летательного аппарата и самолета-генератора вихрей, определяют геометрические характеристики опасной зоны вихревого следа, представляют визуальную информацию экипажу о риске попадания в опасную зону вихревого следа, отличающийся тем, что визуальную информацию экипажу о риске попадания в опасную зону вихревого следа представляют одновременно в горизонтальной и вертикальной плоскостях, при этом на горизонтальном кадре показывают положение самолета-генератора вихрей и горизонтальное сечение опасной зоны вихревого следа на высоте полета летательного аппарата, а также прогнозируемую траекторию полета летательного аппарата в координатах, связанных с самолетом-генератором вихрей, а на вертикальном кадре показывают сечение опасной зоны вихревого следа вертикальной цилиндрической поверхностью, проходящей через прогнозируемую траекторию полета летательного аппарата, определяют диапазоны контрольных параметров полета, которые ведут к попаданию летательного аппарата в опасную зону вихревого следа и представляют их экипажу в составе визуальной информации.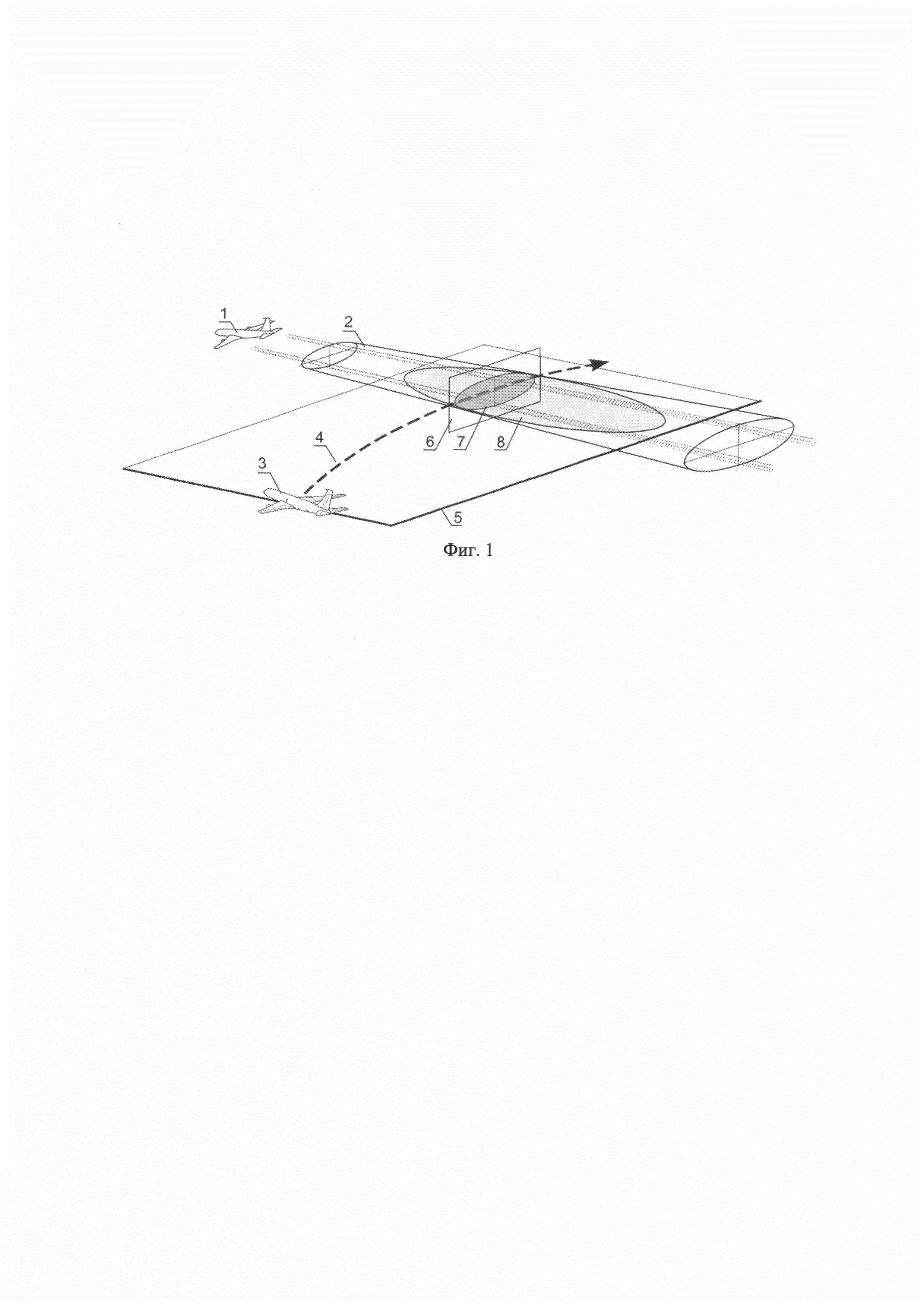
Способ предупреждения попадания летательного аппарата в опасную зону вихревого следа генератора вихрей
Способ моделирования на пилотажном стенде попадания летательного аппарата в вихревой след
Система управления летательным аппаратом
Способ предупреждения попадания летательного аппарата в опасную зону вихревого следа генератора вихрей
Способ моделирования на пилотажном стенде попадания летательного аппарата в вихревой след

