Результат интеллектуальной деятельности: СПОСОБ И АППАРАТ ДЛЯ РЕГУЛИРОВАНИЯ УГЛА СЪЕМКИ КАМЕРЫ
Вид РИД
Изобретение
Настоящая заявка основана и заявляет приоритет по патентной заявке Китая № 201510849310.5, поданной 27 ноября 2015 года, которая полностью включена в данный документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[001] Настоящее изобретение относится к области умных домов, и, более конкретно, к способу и аппарату для регулирования угла съемки камеры.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[002] С популяризацией интеллектуальных устройств и быстрым развитием сетевых технологий, интеллектуальные камеры становятся все более и более популярными в повседневной жизни людей и широко используются в таких режимах, как безопасность, автоматическое управление и удаленное взаимодействие видео.
[003] В известном уровне техники углы съемки интеллектуальных камер являются фиксированными во время их применения. Когда пользователи хотят отрегулировать углы съемки интеллектуальных камер, они могут вручную отрегулировать их с помощью устройств регулирования интеллектуальных камер.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[004] Настоящее изобретение предоставляет способ и аппарат для регулирования угла съемки камеры. Технические решения представлены ниже.
[005] В соответствии с первым аспектом вариантов осуществления настоящего изобретения предложен способ регулирования угла съемки камеры, включающий: определение положения тела человека в диапазоне съемки камеры; регулирование угла съемки камеры в зависимости от положения тела человека, таким образом, чтобы изображение тела человека располагалось по центру видеоизображения, снятого камерой; определение положения лица человека в видеоизображении, снятом камерой; и точную настройку угла съемки камеры, в зависимости от положения лица человека, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[006] Необязательно, указанное определение положения тела человека в диапазоне съемки камеры включает: получение звукового сигнала, отправленного от источника звука в диапазоне съемки камеры; обнаружение пребывания полосы частот звукового сигнала в пределах предустановленной полосы частот; и определение положения источника звука в качестве положения тела человека, если обнаружено, что полоса частот звукового сигнала находится в пределах предустановленной полосы частот.
[007] Необязательно, указанное определение положения тела человека в диапазоне съемки камеры включает: получение инфракрасного сигнала, отправленного источником инфракрасного сигнала в диапазоне съемки камеры; обнаружение соответствия особенностей спектра инфракрасного сигнала предустановленному спектру; и определение положения источника инфракрасного сигнала в качестве положения тела человека, если обнаружено, что особенности спектра инфракрасного сигнала соответствуют предустановленному спектру.
[008] Необязательно, указанное определение положения лица человека в видеоизображении, снятом камерой, включает: выполнение распознавания мимики лица по меньшей мере одного лица человека в видеоизображении, снятом камерой; и определение положения лица человека, чья мимика лица является выделенной мимикой лица в видеоизображении как положение лица человека.
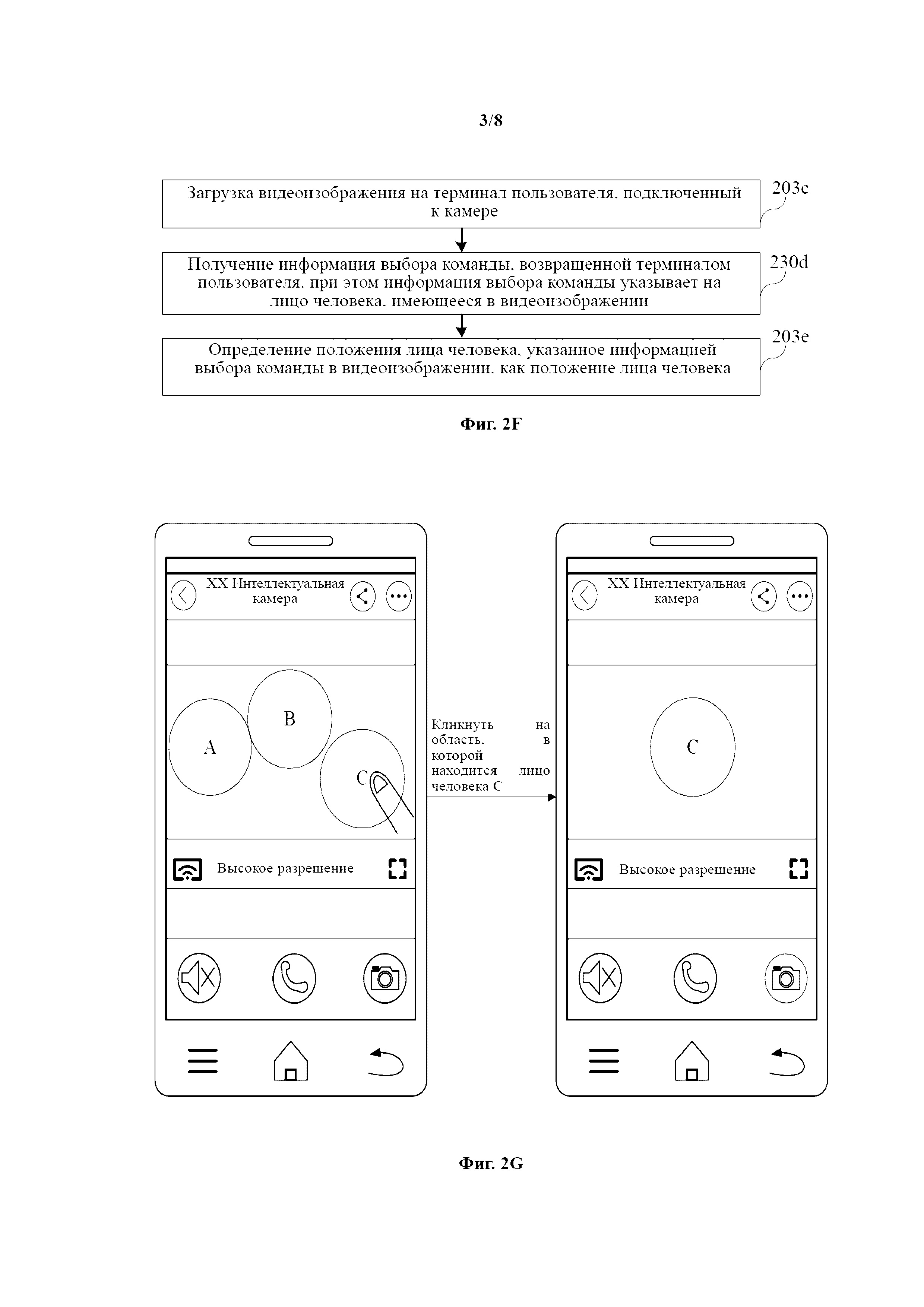
[009] Необязательно, указанное определение положения лица человека в видеоизображении, снятом камерой, включает: загрузку видеоизображения на терминал пользователя, подключенный к камере; получение информации команды выбора, возвращенной терминалом пользователя, при этом информация команды выбора указывает на лицо человека, имеющееся в видеоизображении; и определение положения лица человека, указанного информацией команды выбора в видеоизображении, в качестве положения лица человека.
[0010] Необязательно, способ дополнительно включает: после точной настройки угла съемки камеры в зависимости от положения лица человека, обнаружение расстояния, на которое изображение лица человека отклонено от центра видеоизображения, снятого камерой; при обнаружении, что расстояние, на которое изображение лица человека отклонено от центра видеоизображения, превышает предустановленное расстояние, повторную точную настройку угла съемки камеры на основе изображения при этом положении лица человека, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[0011] В соответствии со вторым аспектом вариантов осуществления настоящего изобретения предложен аппарат для регулирования угла съемки камеры, содержащий: первый модуль позиционирования, выполненный с возможностью определения положения тела человека в диапазоне съемки камеры; первый модуль регулирования, выполненный с возможностью регулирования угла съемки камеры в зависимости от положения тела человека, определенного первым модулем позиционирования, таким образом, чтобы изображение тела человека располагалось по центру видеоизображения, снятого камерой; второй модуль позиционирования, выполненный с возможностью определения положения лица человека в видеоизображении, снятом камерой; и второй модуль регулировки, выполненный с возможностью точной настройки угла съемки камеры в зависимости от положения лица человека, определенного вторым модулем позиционирования, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[0012] Необязательно, первый модуль позиционирования содержит: субмодуль получения звукового сигнала, выполненный с возможностью получения звукового сигнала, отправленного от источника звука в диапазоне съемки камеры; и субмодуль обнаружения полосы частот, выполненный с возможностью обнаружения пребывания полосы частот звукового сигнала, полученного субмодулем получения звука, в пределах предустановленной полосы частот. Положение источника звука определяется как положение тела человека, если обнаружено, что полоса частот звукового сигнала, полученного субмодулем получения звука, находится в пределах предустановленной полосы частот.
[0013] Необязательно, первый модуль позиционирования содержит: субмодуль получения инфракрасного сигнала, выполненный с возможностью получения инфракрасного сигнала, отправленного источником инфракрасного сигнала в диапазоне съемки камеры; и субмодуль обнаружения спектра, выполненный с возможностью обнаружения соответствия особенностей спектра инфракрасного сигнала, полученного субмодулем получения инфракрасного сигнала, предустановленному спектру. Положение источника инфракрасного сигнала определяется как положение тела человека, если обнаружено, что особенности спектра инфракрасного сигнала, полученного субмодулем получения инфракрасного сигнала, соответствуют предустановленному спектру.
[0014] Необязательно, второй модуль позиционирования содержит: субмодуль распознавания мимики лица, выполненный с возможностью распознавания мимики лица по меньшей мере одного лица человека в видеоизображении, снятом камерой; и первый субмодуль позиционирования, выполненный с возможностью определения положения лица человека, чья мимика лица, распознанная субмодулем распознавания мимики лица, является выделенной мимикой лица в видеоизображении, как положение лица человека.
[0015] Необязательно, второй модуль позиционирования содержит: субмодуль загрузки изображения, выполненный с возможностью загрузки видеоизображения на терминал пользователя, подключенный к камере; субмодуль получения информации, выполненный с возможностью получения информации команды выбора, возвращенной терминалом пользователя, при этом информация команды выбора указывает на лицо человека, имеющееся в видеоизображении; и второй субмодуль позиционирования, выполненный с возможностью определения положения лица человека, указанного информацией команды выбора, полученной субмодулем получения информации в видеоизображении, как положение лица человека.
[0016] Необязательно, аппарат дополнительно содержит модуль определения расстояния, выполненный с возможностью после произведения точной настройки угла съемки камеры в зависимости от положения лица человека, обнаруживать расстояние, на которое изображение лица человека отклонено от центра видеоизображения, снятого камерой. Второй модуль регулирования дополнительно выполнен с возможностью снова производить точную настройку угла съемки камеры в зависимости от положения изображения лица человека, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой, когда обнаружено, что расстояние, на которое изображение лица человека отклонено от центра видеоизображения, обнаруженное модулем обнаружения расстояния, превышает предустановленное расстояние.
[0017] В соответствии с третьим аспектом вариантов осуществления настоящего изобретения предусмотрен аппарат для регулирования угла съемки камеры, содержащий процессор и запоминающее устройство, выполненное с возможностью хранения команд, выполняемых процессором. Процессор выполнен с возможностью: определять положение тела человека в диапазоне съемки камеры; регулировать угол съемки камеры в зависимости от положения тела человека, таким образом, чтобы изображение тела человека находилось по центру видеоизображения, снятого камерой; определять положение лица человека в видеоизображении, снятом камерой; и точно настраивать угол съемки камеры, в зависимости от положения лица человека, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[0018] Технические решения вариантов осуществления настоящего изобретения обладают следующими преимущественными эффектами.
[0019] За счет определения положения тела человека в диапазоне съемки камеры, регулирования угла съемки камеры таким образом, чтобы камера была ориентирована на положение тела человека, и последующей точной настройки камеры в зависимости от положения лица человека, точная настройка угла съемки камеры выполняется автоматически в зависимости от положения лица человека, без необходимости пользователям вручную регулировать угол съемки камеры, таким образом снижая сложность операций пользователей и повышая точность регулировки угла съемки.
[0020] Следует иметь в виду, что как вышеизложенное общее описание, так и последующее подробное описание являются только иллюстративными и пояснительными и не ограничивают объем настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0021] Прилагаемые графические материалы, которые включены в данное описание и являются его частью, иллюстрируют варианты осуществления, согласующиеся с настоящим изобретением, и вместе с описанием служат для объяснения главных идей настоящего изобретения.
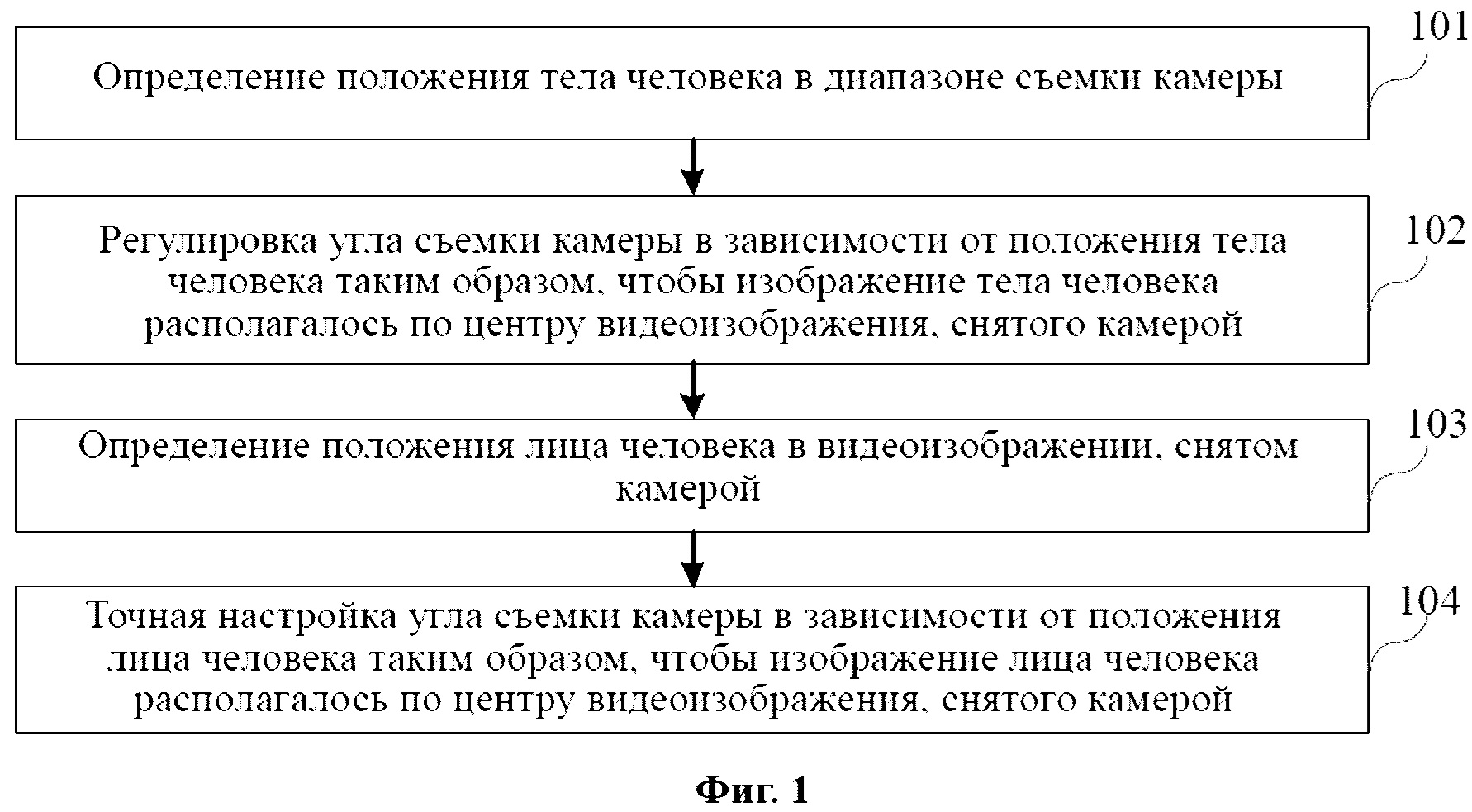
[0022] На фиг. 1 представлена блок-схема, показывающая способ регулирования угла съемки камеры в соответствии с иллюстративным вариантом осуществления.
[0023] На фиг. 2A представлена блок-схема, показывающая способ регулирования угла съемки камеры в соответствии с другим иллюстративным вариантом осуществления.
[0024] На фиг. 2B представлена блок-схема, показывающая процесс определения положения тела человека в диапазоне съемки камеры в соответствии с иллюстративным вариантом осуществления.
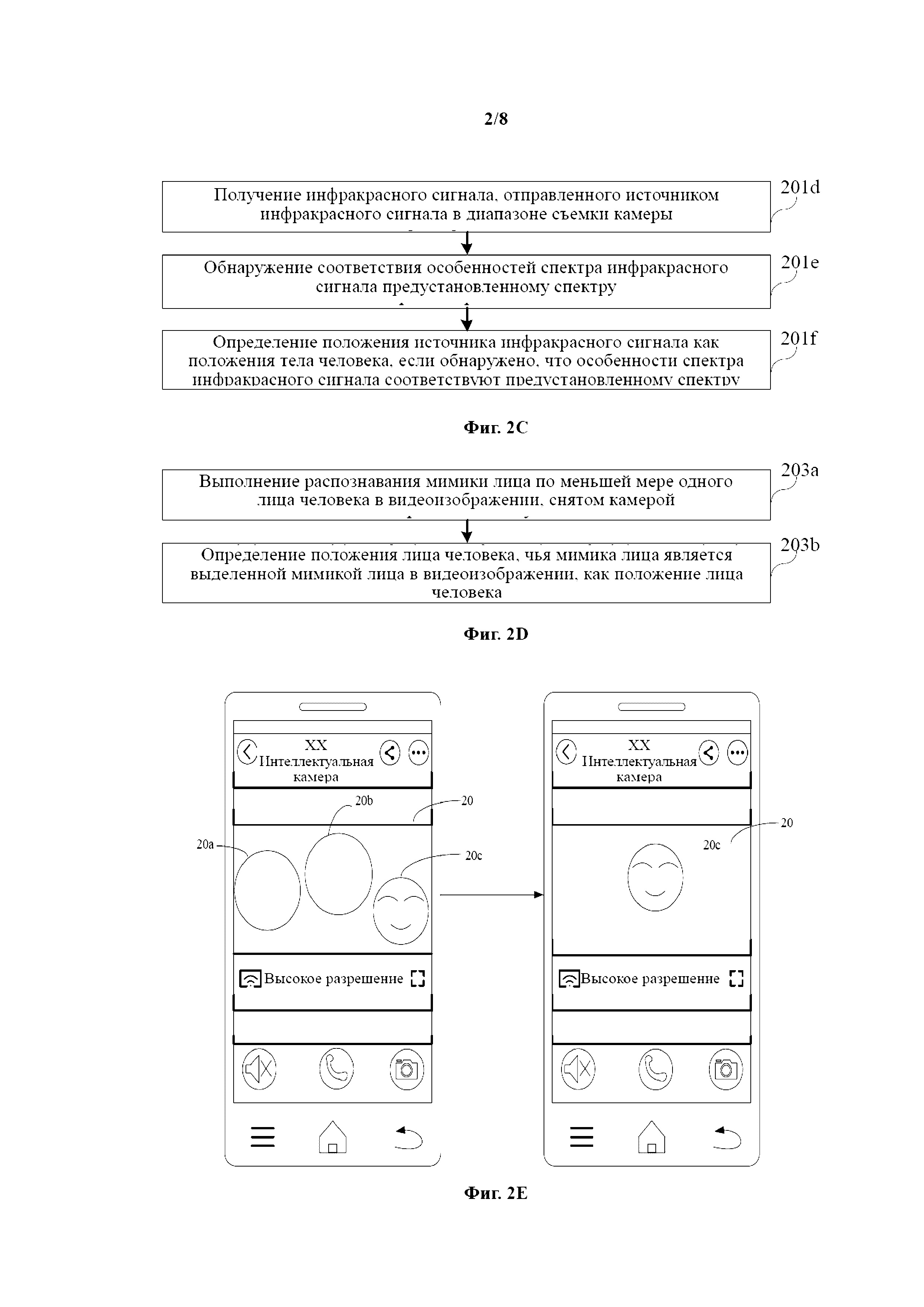
[0025] На фиг. 2C представлена блок-схема, показывающая процесс определения положения тела человека в диапазоне съемки камеры в соответствии с другим иллюстративным вариантом осуществления.
[0026] На фиг. 2D представлена блок-схема, показывающая процесс определения положения лица человека в соответствии с иллюстративным вариантом осуществления.
[0027] На фиг. 2E представлена схема, показывающая как отрегулировать угол съемки камеры в соответствии с иллюстративным вариантом осуществления.
[0028] На фиг. 2F представлена блок-схема, показывающая процесс определения положения лица человека в соответствии с другим иллюстративным вариантом осуществления.
[0029] На фиг. 2G представлена схема, показывающая как отрегулировать угол съемки камеры в соответствии с другим иллюстративным вариантом осуществления.
[0030] На фиг. 3A представлена блок-схема, показывающая способ регулирования угла съемки камеры в соответствии с еще одним иллюстративным вариантом осуществления.
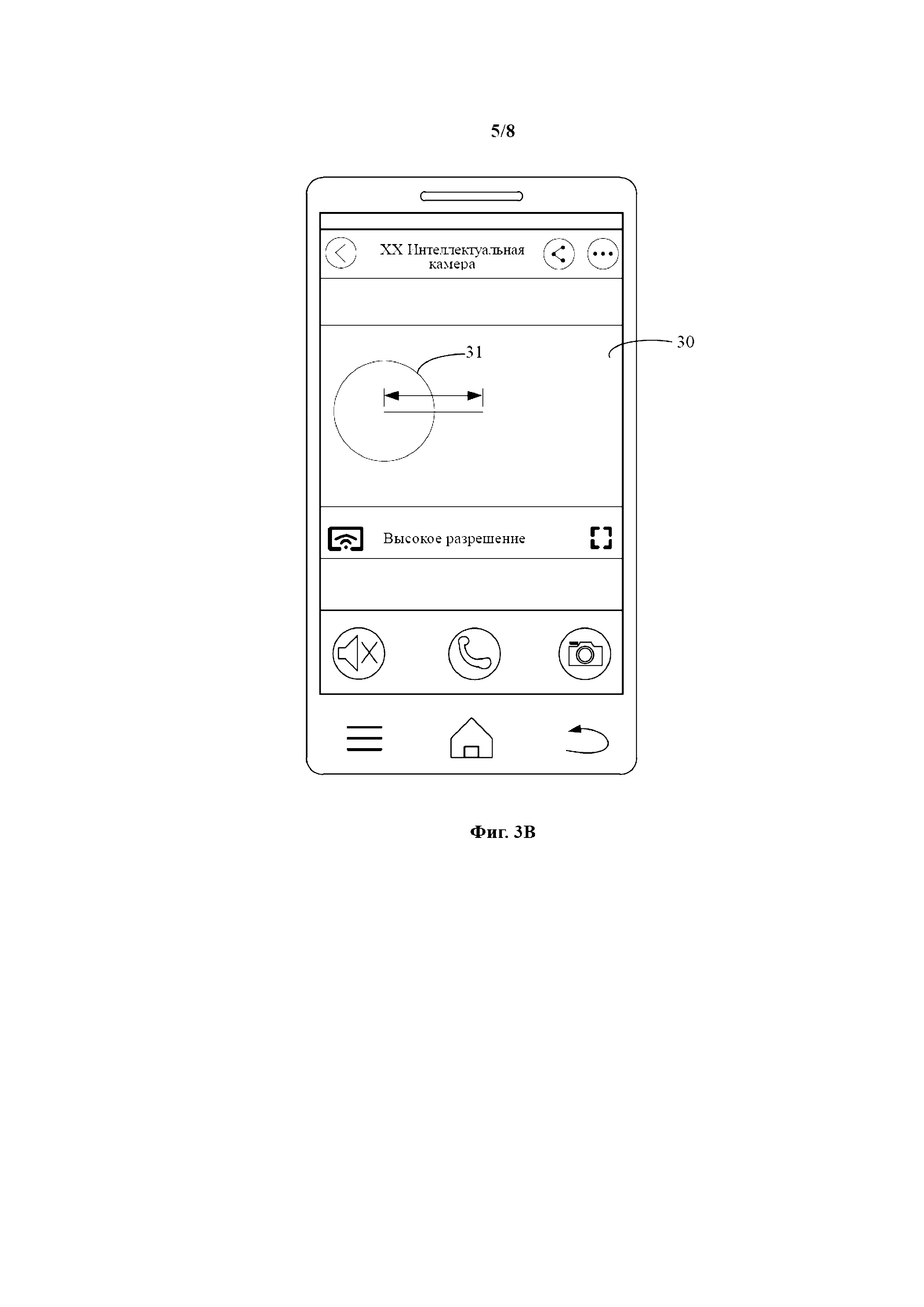
[0031] На фиг. 3B представлена схема, показывающая как обнаружить расстояние отклонения лица человека в соответствии с иллюстративным вариантом осуществления.
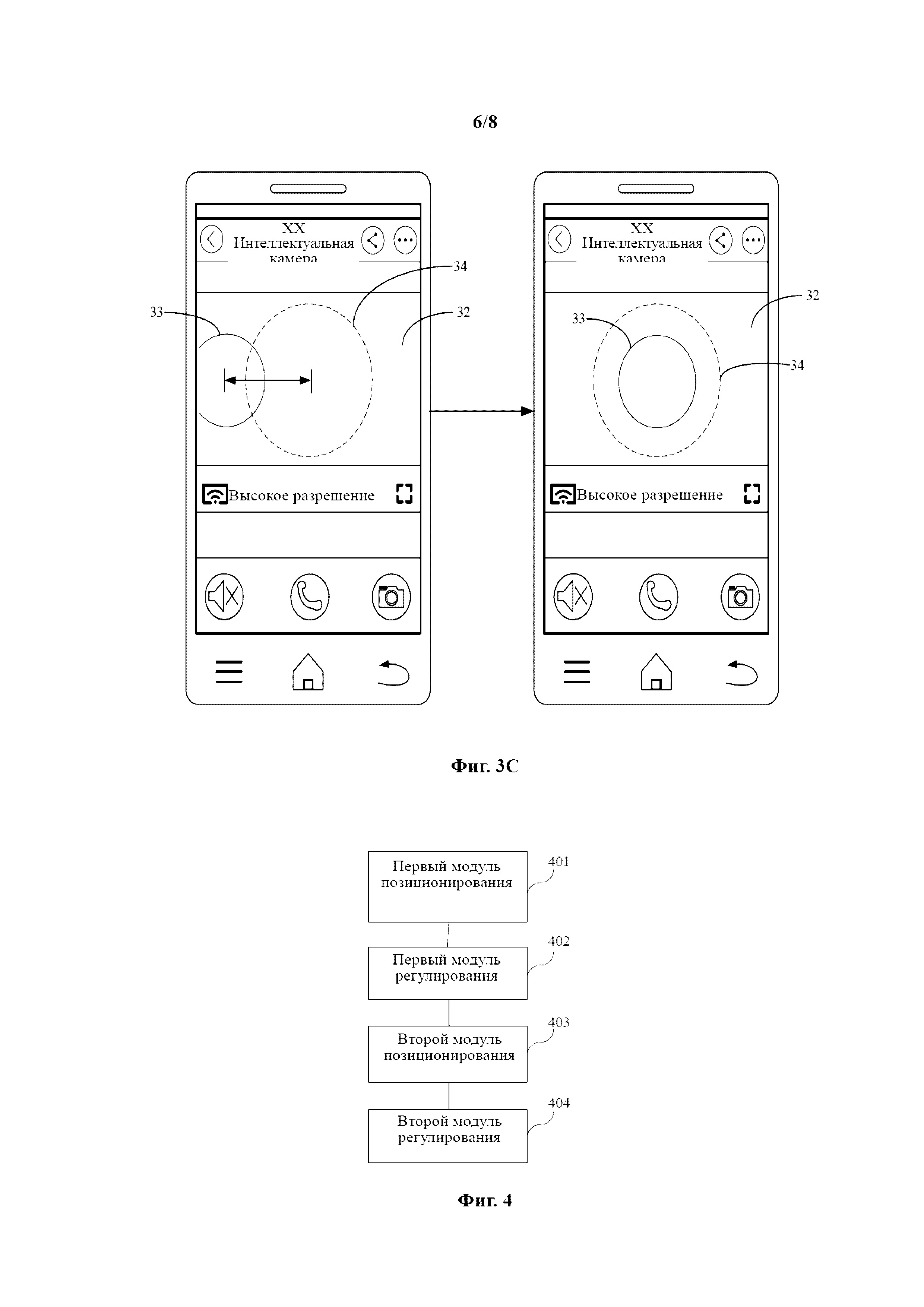
[0032] На фиг. 3C представлена схема, показывающая как отрегулировать положение лица человека в соответствии с иллюстративным вариантом осуществления.
[0033] На фиг. 4 представлена блок-схема, иллюстрирующая аппарат для регулирования угла съемки камеры в соответствии с иллюстративным вариантом осуществления.
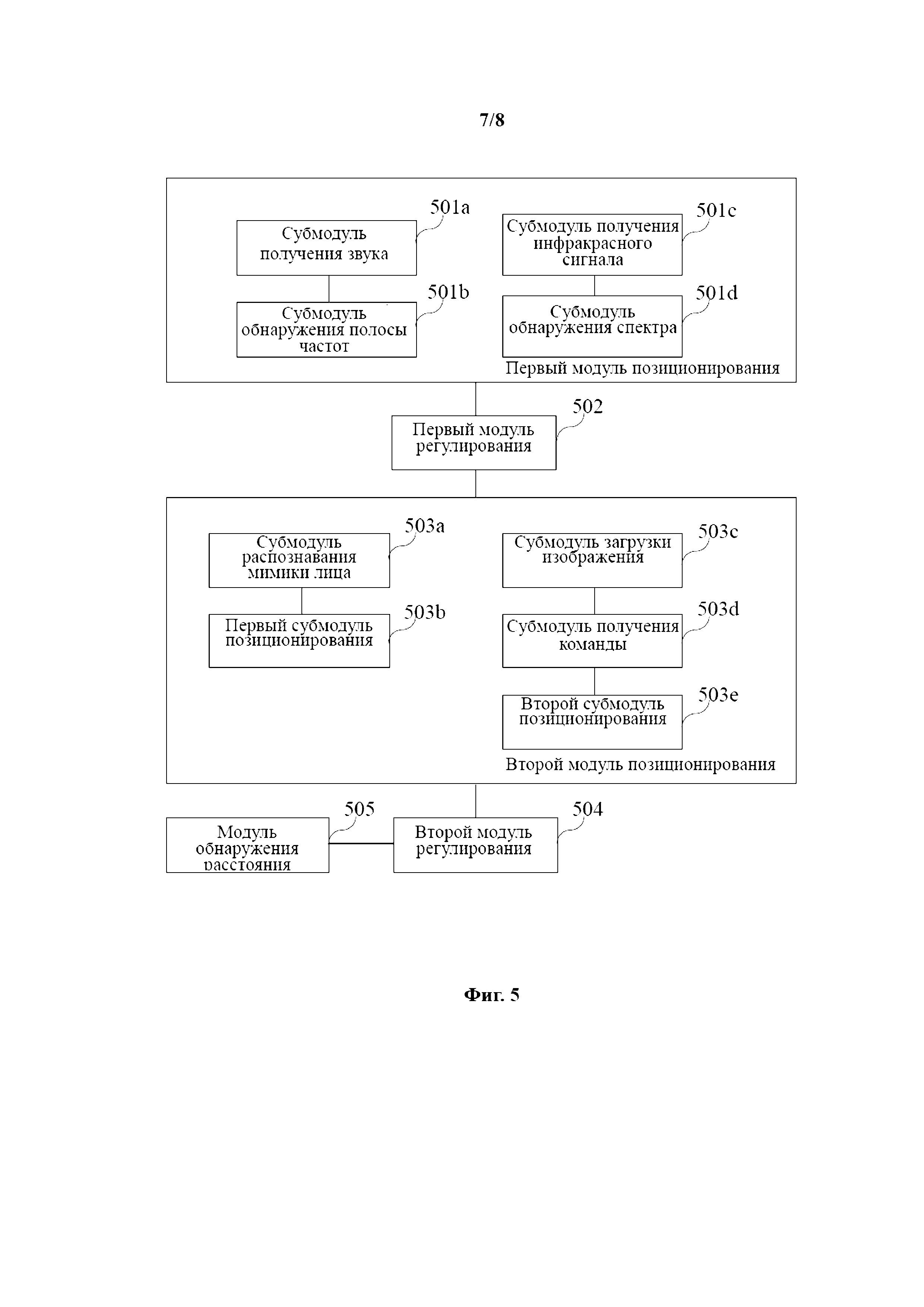
[0034] На фиг. 5 представлена блок-схема, иллюстрирующая аппарат для регулирования угла съемки камеры в соответствии с другим иллюстративным вариантом осуществления.
[0035] На фиг. 6 представлена блок-схема, иллюстрирующая аппарат для регулирования угла съемки камеры в соответствии с еще одним иллюстративным вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0036] Далее ссылка будет сделана на иллюстративные варианты осуществления, примеры которых проиллюстрированы в прилагаемых графических материалах. Последующее описание относится к прилагаемым графическим материалам, на которых одинаковые числовые обозначения на различных графических материалах представляют одни и те же или схожие элементы, если не указанное иное. Варианты осуществления, изложенные в последующем описании иллюстративных вариантов осуществления, не представляют все варианты осуществления, согласующиеся с настоящим изобретением. Напротив, они являются только примерами устройств и способов, согласующихся с аспектами, связанными с настоящим изобретением, как указанно в пунктах прилагаемой формулы изобретения.
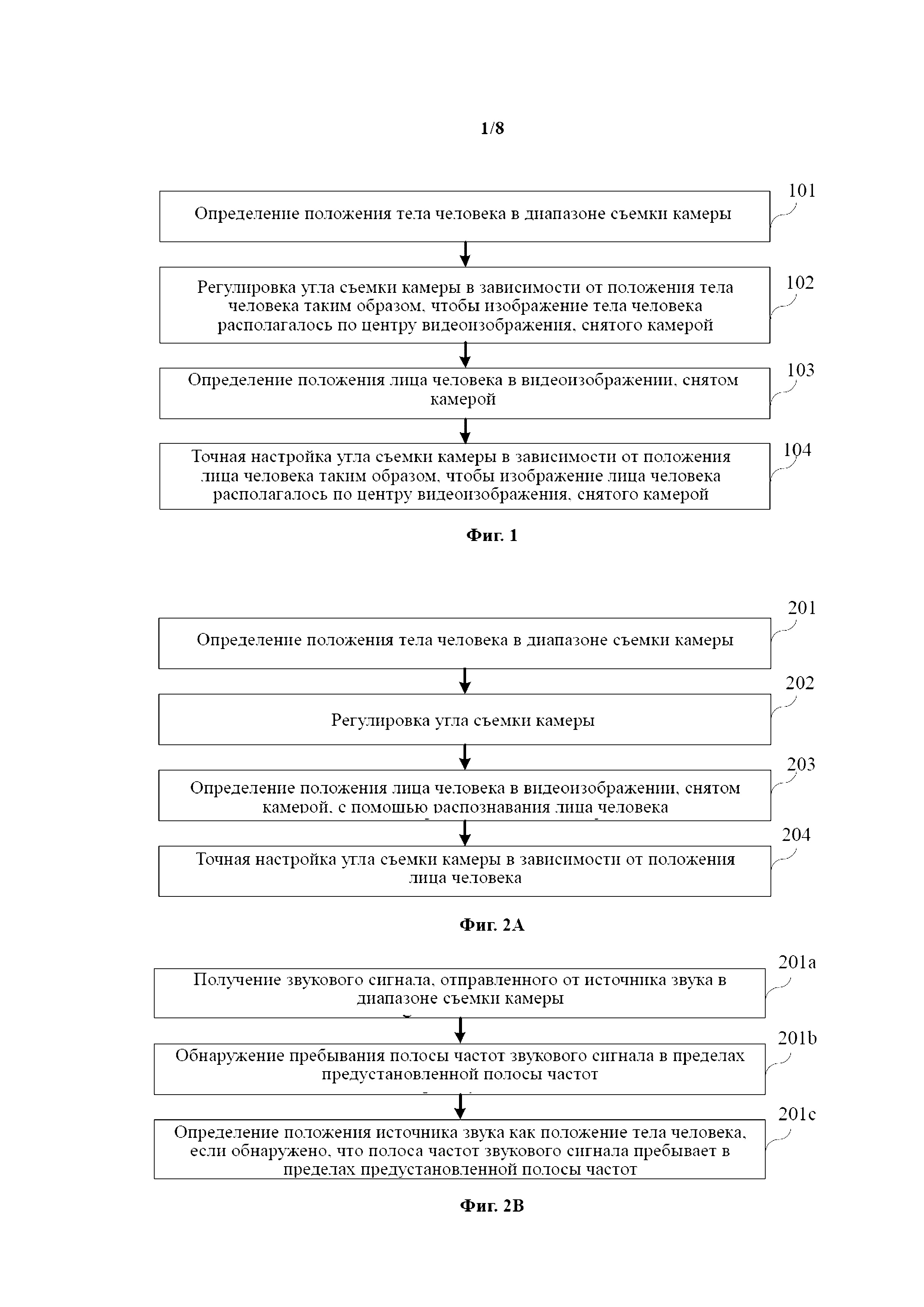
[0037] На фиг. 1 представлена блок-схема, показывающая способ регулирования угла съемки камеры в соответствии с иллюстративным вариантом осуществления. Этот способ применяют в интеллектуальной камере. Как показано на фиг. 1, способ может включать следующие этапы.
[0038] На этапе 101 определяют положение тела человека в диапазоне съемки камеры.
[0039] На этапе 102 угол съемки камеры регулируют в зависимости от положения тела человека таким образом, чтобы изображение тела человека располагалось по центру видеоизображения, снятого камерой.
[0040] На этапе 103 определяют положение лица человека в видеоизображении, снятом камерой.
[0041] На этапе 104 производят точную настройку угла съемки камеры в зависимости от положения лица человека таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[0042] Необязательно, указанное определение положения тела человека в диапазоне съемки камеры включает: получение звукового сигнала, отправленного от источника звука в диапазоне съемки камеры; обнаружение пребывания полосы частот звукового сигнала в пределах предустановленной полосы частот; и определение положения источника звука в качестве положения тела человека, если обнаружено, что полоса частот звукового сигнала находится в пределах предустановленной полосы частот.
[0043] Необязательно, указанное определение положения тела человека в диапазоне съемки камеры включает: получение инфракрасного сигнала, отправленного источником инфракрасного сигнала в диапазоне съемки камеры; обнаружение соответствия особенностей спектра инфракрасного сигнала предустановленному спектру; и определение положения источника инфракрасного сигнала в качестве положения тела человека, если обнаружено, что особенности спектра инфракрасного сигнала соответствуют предустановленному спектру.
[0044] Необязательно, указанное определение положения лица человека в видеоизображении, снятом камерой, включает: выполнение распознавания мимики лица по меньшей мере одного лица человека в видеоизображении, снятом камерой; и определение положения лица человека, чья мимика лица является выделенной мимикой лица в видеоизображении как положение лица человека.
[0045] Необязательно, указанное определение положения лица человека в видеоизображении, снятом камерой, включает: загрузку видеоизображения на терминал пользователя, подключенный к камере; получение информации команды выбора, возвращенной терминалом пользователя, при этом информация команды выбора указывает на лицо человека, имеющееся в видеоизображении; и определение положения лица человека, указанного информацией команды выбора в видеоизображении, в качестве положения лица человека.
[0046] Необязательно, способ дополнительно включает: после точной настройки угла съемки камеры в зависимости от положения лица человека, обнаружение расстояния, на которое изображение лица человека отклонено от центра видеоизображения, снятого камерой; при обнаружении, что расстояние, на которое изображение лица человека отклонено от центра видеоизображения, превышает предустановленное расстояние, повторную точную настройку угла съемки камеры на основе положения изображения лица человека, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[0047] Суммируя описанное выше, в способе регулирования угла съемки камеры в соответствии с вариантом осуществления настоящего изобретения, определяют положение тела человека в диапазоне съемки камеры, угол съемки камеры регулируют таким образом, чтобы камера ориентировалась на положение тела человека, и затем выполняют точную настройку камеры в зависимости от положения лица человека. Как таковая, точная настройка угла съемки камеры выполняется автоматически в зависимости от положения лица человека, пользователям не нужно вручную регулировать угол съемки камеры, благодаря чему снижается сложность операций пользователей и повышается точность регулировки угла съемки.
[0048] На фиг. 2A представлена блок-схема, показывающая способ регулирования угла съемки камеры в соответствии с другим иллюстративным вариантом осуществления. Этот способ применяют в интеллектуальной камере. Как показано на фиг. 2A, способ может включать следующие этапы.
[0049] На этапе 201 определяют положение тела человека в диапазоне съемки камеры.
[0050] В возможном варианте реализации, как показано на фиг. 2B, блок-схема, которая отображает процесс определения положения тела человека в диапазоне съемки камеры в соответствии с иллюстративным вариантом осуществления, при этом способ может включать следующие этапы.
[0051] На этапе 201a получают звуковой сигнал, отправленный от источника звука в диапазоне съемки камеры.
[0052] На этапе 201b обнаруживают пребывание полосы частот звукового сигнала в пределах предустановленной полосы частот.
[0053] На этапе 201c определяют положение источника звука как положение тела человека, если обнаружено, что полоса частот звукового сигнала пребывает в пределах предустановленной полосы частот.
[0054] Интеллектуальная камера может определять положение тела человека в зависимости от звукового сигнала, отправленного от источника звука в диапазоне съемки камеры. Например, интеллектуальная камера содержит встроенное устройство получения звукового сигнала, которое получает звуковые сигналы, отправленные от источника звука в предустановленный период времени и принимает среднюю величину звуковых сигналов, полученных в предустановленный период времени. Предустановленный период времени не ограничен, и может быть задан на 30 секунд или на 1 минуту. Если средняя величина звуковых сигналов присутствует в пределах предустановленной полосы частот, положение звуковых сигналов определяется в качестве положения тела человека. Особенно, если должно быть определено положение тела человека, предустановленной полосой частот должна быть полоса частот, в которой люди нормально общаются. Например, полоса частот, при которой люди нормально разговаривают, составляет 130-350 Гц.
[0055] В другом возможном варианте реализации, как показано на фиг. 2С, блок-схема которой отображает процесс определения положения тела человека в диапазоне съемки камеры в соответствии с другим иллюстративным вариантом осуществления, при этом способ включает следующие этапы.
[0056] На этапе 201d получают инфракрасный сигнал, отправленный источником инфракрасного сигнала в диапазоне съемки камеры.
[0057] На этапе 201e обнаруживают соответствие особенностей спектра инфракрасного сигнала предустановленному спектру.
[0058] На этапе 201f положение источника инфракрасного сигнала определяют как положение тела человека, если обнаружено, что особенности спектра инфракрасного сигнала соответствуют предустановленному спектру.
[0059] В дополнение к или вместо определения положения тела человека в зависимости от звуковых сигналов, отправленных от источника звука в диапазоне съемки камеры, интеллектуальная камера может также определять положение тела человека в зависимости от особенностей спектра инфракрасного сигнала. Особенности спектра инфракрасного сигнала могут содержать среди прочего частоту инфракрасного сигнала и его длину волны. Инфракрасные сигналы, отправленные разными объектами, имеют различные особенности спектра. В возможном варианте реализации настоящего изобретения особенности спектра тела человека могут быть заданы в качестве предустановленного спектра. Если особенности спектра инфракрасных сигналов, посланных объектом, соответствуют предустановленному спектру, этот объект может быть определен как тело человека.
[0060] На этапе 202 регулируют угол съемки камеры.
[0061] Угол съемки камеры регулируют таким образом, чтобы изображение тела человека располагалось по центру видеоизображения, снятого камерой.
[0062] В интеллектуальной камере специально предусмотрен микроэлектродвигатель. После того как интеллектуальная камера определяет положение тела человека, микроэлектродвигатель в интеллектуальной камере начинает работать для регулирования угла съемки камеры таким образом, чтобы изображение тела человека располагалось по центру видеоизображения, снятого камерой.
[0063] На этапе 203 положение лица человека в видеоизображении, снятом камерой, определяют с помощью выполнения распознавания лица человека.
[0064] После определения положения тела человека, чтобы добиться лучшего эффекта съемки, положение лица человека в видеоизображении, снятом камерой, определяют камерой через распознавание лица человека. Интеллектуальная камера, главным образом, определяет положение лица человека, на основе характерных особенностей тела человека в видеоизображении, таких как уши, глаза, рот и нос, формы характерных особенностей и их геометрических отношений.
[0065] На этапе 204 угол съемки камеры точно настраивают в зависимости от положения лица человека.
[0066] Если имеется только одно лицо человека в видеоизображении, снятом камерой, угол съемки камеры может быть точно настроен таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[0067] Необязательно, когда в видеоизображении, снятом камерой, присутствует несколько человеческих лиц, может быть определено положение одного из человеческих лиц, и, на основе определенного положения лица человека, затем может быть выполнена точная настройка. Если в видеоизображении, снятом камерой, имеется несколько человеческих лиц, способ определения положения одного из человеческих лиц может быть таким, как описано ниже.
[0068] В возможном варианте реализации, как показано на фиг. 2D, блок-схема которой отображает процесс определения положения лица человека в соответствии с иллюстративным вариантом осуществления, способ может включать следующие этапы.
[0069] На этапе 203a выполняют распознавание мимики лица по меньшей мере одного лица человека в видеоизображении, снятом камерой.
[0070] На этапе 203b положение лица человека, чья мимика лица является выделенной мимикой лица в видеоизображении, определяют как положение лица человека.
[0071] Если в видеоизображении, снятом камерой, имеется несколько человеческих лиц, лицо человека, которое снимает камера, может быть определено с помощью распознавания мимики лица. Например, улыбающееся выражение лица предустановлено в качестве выделенной мимики лица. Если в видеоизображении, снятом камерой, имеется несколько человеческих лиц, и одно лицо человека имеет улыбающееся выражение, угол съемки камеры точно настраивают таким образом, чтобы лицо человека, имеющее улыбающееся выражение, располагалось по центру видеоизображения, снятого камерой. На фиг. 2E представлена схема, показывающая как отрегулировать угол съемки камеры в соответствии с иллюстративным вариантом осуществления. Видеоизображение 20, показанное на фиг. 2E, содержит три человеческих лица 20a, 20b и 20c. Камера обнаруживает, что одно лицо человека 20c имеет улыбающееся выражение лица. Затем угол съемки камеры точно настраивают таким образом, чтобы лицо человека 20c, имеющее улыбающееся выражение лица, было расположено по центру видеоизображения.
[0072] В другом возможном варианте реализации, как показано на фиг. 2F, блок-схема которой отображает процесс определения положения лица человека в соответствии с другим иллюстративным вариантом осуществления, при этом этап s03 может включать следующие этапы.
[0073] На этапе 203c видеоизображение загружают на терминал пользователя, подключенный к камере.
[0074] На этапе 203d получают информацию команды выбора, возвращенную терминалом пользователя, при этом информация команды выбора указывает на лицо человека, имеющееся в видеоизображении.
[0075] На этапе 203e определяют положение лица человека, указанное информацией команды выбора в видеоизображении, как положение лица человека.
[0076] Необязательно, если на видеоизображении, снятом камерой, имеется несколько человеческих лиц, камера может загрузить снятое видеоизображение на подключенный к ней терминал пользователя. Пользователь может выбрать лицо человека, которого будет снимать. При получении информации команды выбора, возвращенной терминалом пользователя, камера определяет положение лица человека, указанное информацией команды выбора в видеоизображении, в качестве положения лица человека. На фиг. 2G представлена схема, показывающая как отрегулировать угол съемки камеры в соответствии с другим иллюстративным вариантом осуществления. Видеоизображение, показанное на фиг. 2G, является видеоизображением, переданным камерой на терминал пользователя и отображенным в терминале пользователя. Видеоизображение содержит три человеческих лица A, B и C. Когда пользователь кликает на область, в которой находится лицо C человека, терминал пользователя отправляет на камеру информацию о местоположении, относящуюся к лицу С человека. После получения информации о местоположении, камера определяет, что пользователь выбрал лицо С человека на основе информации о местоположении. Затем угол съемки камеры точно настраивают таким образом, чтобы изображение лица С человека располагалось по центру видеоизображения.
[0077] Суммируя описанное выше, в способе регулирования угла съемки камеры в соответствии с вариантом осуществления настоящего изобретения, определяют положение тела человека в диапазоне съемки камеры, угол съемки камеры регулируют таким образом, чтобы камера ориентировалась на положение тела человека, и затем выполняют точную настройку камеры в зависимости от положения лица человека. Как таковой, угол съемки камеры точно настраивается автоматически в зависимости от положения лица человека, пользователям не нужно вручную регулировать угол съемки камеры, таким образом снижается сложность операций пользователей и повышается точность регулировки угла съемки.
[0078] Кроме того, применяя способ обнаружения источника звука или инфракрасного сигнала, получают звуковой сигнал или инфракрасный сигнал, отправленный телом человека в диапазоне съемки, и положение тела человека в диапазоне съемки может быть определено на основе предустановленной полосы частот или частотно-временного спектра таким образом, чтобы точно и эффективно можно было отслеживать тело человека в диапазоне съемки. Соответственно, угол съемки камеры может быть отрегулирован с учетом положения тела человека, и можно избежать того, что положение животного или объекта, отличных от тела человека, будет определено как положение тела человека.
[0079] Кроме того, лицо человека, которого снимает камера, может быть определено путем распознавания мимики лица в диапазоне съемки. Альтернативно, камера загружает снятое видеоизображение на терминал пользователя, подключенный к камере; и с помощью получения информации команды выбора от терминала пользователя, может быть определено лицо человека, которого снимают. Соответственно, может быть точно настроен угол съемки. В этой связи, когда в диапазоне съемки присутствует несколько человеческих лиц удобно отрегулировать угол съемки камеры, исходя из потребностей пользователя, таким образом, чтобы лицо человека, которого снимают, отображалось по центру видеоизображения.
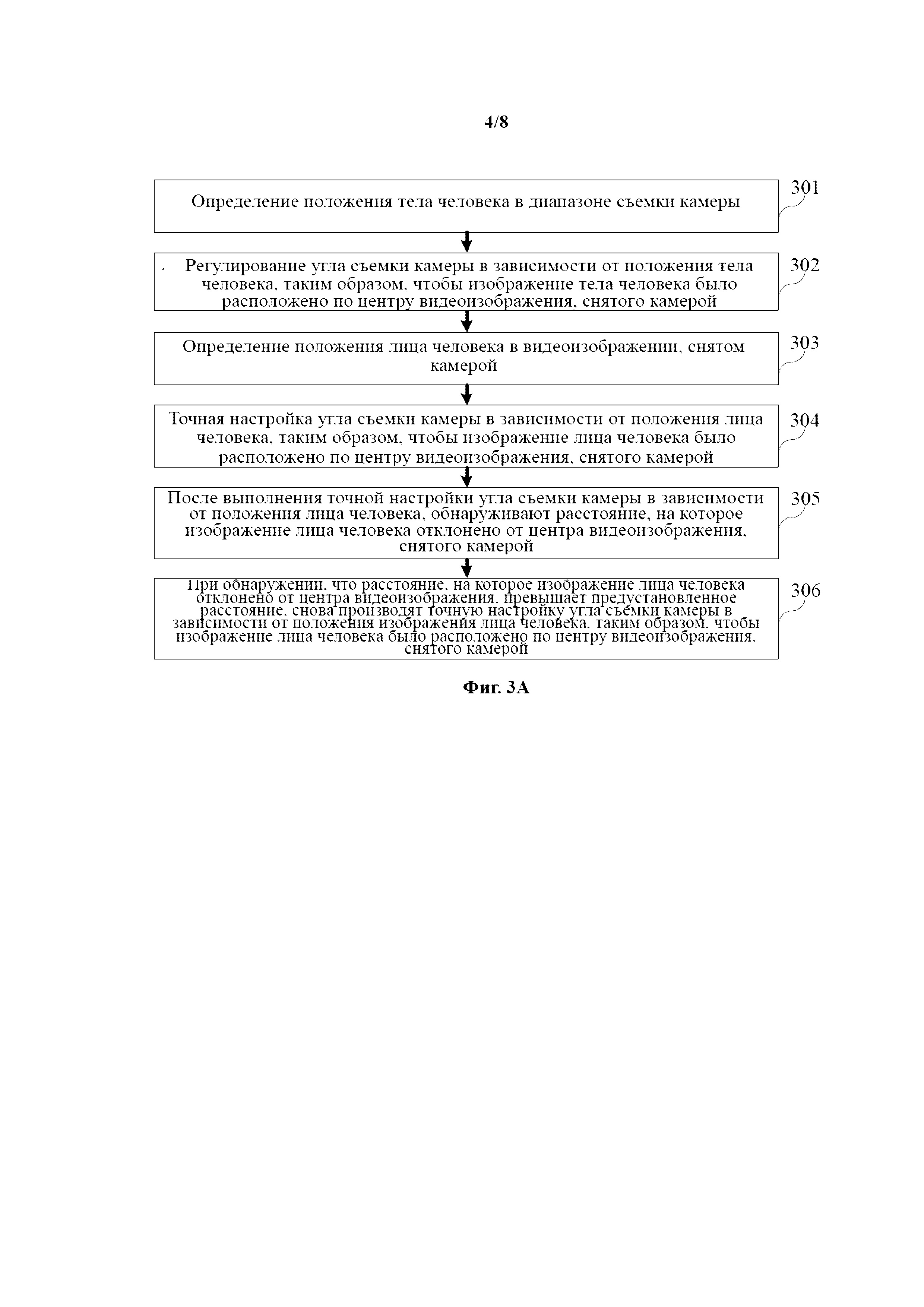
[0080] На фиг. 3A представлена блок-схема, показывающая способ регулирования угла съемки камеры в соответствии с еще одним иллюстративным вариантом осуществления. Этот способ применяют в интеллектуальной камере. Как показано на фиг. 3A, способ может включать следующие этапы.
[0081] На этапе 301 определяют положение тела человека в диапазоне съемки камеры.
[0082] На этапе 302 регулируют угол съемки камеры.
[0083] На этапе 303 положение лица человека в видеоизображении, снятом камерой, определяют с помощью выполнения распознавания лица человека.
[0084] На этапе 304 угол съемки камеры точно настраивают в зависимости от положения лица человека.
[0085] Для реализации этапов 301-304 ссылка может быть сделана на описание этапов 201-204 в варианте осуществления, показанном на фиг. 2, и его описание не будет повторено в данном документе.
[0086] На этапе 305 после выполнения точной настройки угла съемки камеры в зависимости от положения лица человека, обнаруживают расстояние, на которое изображение лица человека отклонено от центра видеоизображения, снятого камерой.
[0087] Поскольку положение лица человека меняется в ходе видеосъемки, камера обнаруживает расстояние, на которое изображение лица человека отклонено от центра видеоизображения, снятого камерой, чтобы предотвратить выход положения лица человека за пределы диапазона съемки камеры, и таким образом добиться лучшего эффекта съемки. В частности, обратимся к фиг. 3B, схема которой показывает как определить расстояние отклонения лица человека. Центр видеоизображения 30, снятого камерой, как показано на фиг. 3B, принят в качестве точки отсчета. Вычисляют расстояние от центра видеоизображения 30 до центра изображения 31 лица человека. Расстояние от центра видеоизображения 30 до центра изображения 31 лица человека принято в качестве расстояния, на которое изображение лица человека отклонено от центра видеоизображения, снятого камерой.
[0088] На этапе 306 при обнаружении, что расстояние, на которое изображение лица человека отклонено от центра видеоизображения, превышает предустановленное расстояние, снова производят точную настройку угла съемки камеры в зависимости от положения изображения лица человека, таким образом, чтобы изображение лица человека было расположено по центру видеоизображения, снятого камерой.
[0089] Камера может выделить центр видеоизображения, снятого камерой в качестве центра круга, и выделить предустановленное расстояние в качестве его радиуса. Когда обнаружено, что расстояние от центра видеоизображения до центра изображения лица человека превышает предустановленное расстояние (т.е. центр изображения лица человека расположен за пределами круга, у которого центр видеоизображения является его центром и предустановленное расстояние является его радиусом), снова производят точную настройку угла съемки камеры в зависимости от положения изображения лица человека.
[0090] В частности, обратимся к фиг. 3B, схема которой показывает как отрегулировать положение лица человека. На фиг. 3C, когда обнаружено, что расстояние от центра видеоизображения 32 до центра изображения 33 лица человека превышает предустановленное расстояние (т.е., центр изображения 33 лица человека расположен за пределами круга 34, центр которого является центром видеоизображения 32 и радиус которого является предустановленным расстоянием), снова производят точную настройку угла съемки камеры, чтобы изображение 33 лица человека располагалось по центру видеоизображения 32.
[0091] Предпочтительно, угол съемки камеры не регулируют сразу как только камера обнаруживает, что расстояние от центра видеоизображения до центра изображения лица человека превышает предустановленное расстояние, а регулируют через предустановленный период времени (который может составлять, например, 5 или 10 сек). Камера выполняет точную настройку угла съемки в зависимости от положения лица человека, только когда расстояние от центра видеоизображения до центра изображения при положении лица человека превышает предустановленное расстояние в течение периода времени, превышающего предустановленный период времени.
[0092] Следует отметить, что обнаружение расстояния, на которое изображение лица человека отклоняется от центра видеоизображения, и предустановленное расстояние не определены вариантом осуществления, но могут быть заданы разработчиками или пользователями в соответствии с их фактическими потребностями.
[0093] Суммируя описанное выше, в способе регулирования угла съемки камеры в соответствии с вариантом осуществления настоящего изобретения, определяют положение тела человека в диапазоне съемки камеры, угол съемки камеры регулируют таким образом, чтобы камера ориентировалась на положение тела человека, и затем выполняют точную настройку камеры в зависимости от положения лица человека. Как таковой, угол съемки камеры точно настраивается автоматически в зависимости от положения лица человека, пользователям не нужно вручную регулировать угол съемки камеры, таким образом снижается сложность операций пользователей и повышается точность регулировки угла съемки.
[0094] Кроме того, применяя способ обнаружения источника звука или инфракрасного сигнала, получают звуковой сигнал или инфракрасный сигнал, отправленный телом человека в диапазоне съемки, и положение тела человека в диапазоне съемки может быть определено на основе предустановленной полосы частот или частотно-временного спектра таким образом, чтобы точно и эффективно можно было отслеживать тело человека в диапазоне съемки. Соответственно, угол съемки камеры может быть отрегулирован с учетом положения тела человека, и можно избежать того, что положение животного или объекта, отличных от тела человека, будет определено как положение тела человека.
[0095] Кроме того, лицо человека, которого снимает камера, может быть определено путем распознавания мимики лица в диапазоне съемки. Альтернативно, камера загружает снятое видеоизображение на терминал пользователя, подключенный к камере; и с помощью получения информации команды выбора от терминала пользователя, может быть определено лицо человека, которого снимают. Соответственно, может быть точно настроен угол съемки. В этой связи, когда в диапазоне съемки присутствует несколько человеческих лиц удобно отрегулировать угол съемки камеры, исходя из потребностей пользователя, таким образом, чтобы лицо человека, которого снимают, отображалось по центру видеоизображения.
[0096] Кроме того, определяется расстояние между центром видеоизображения и изображением лица человека и, если расстояние между центром видеоизображения и изображением лица человека превышает предустановленное расстояние, точно настраивают угол съемки камеры таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, чтобы добиться таким образом лучшего эффекта съемки.
[0097] Ниже описаны варианты осуществления аппарата согласно настоящему изобретению, которые могут быть применены для выполнения вариантов осуществления способа согласно настоящему изобретению. Для подробного описания, не раскрытого в вариантах осуществления аппарата согласно настоящему изобретению, может быть сделана ссылка на варианты осуществления способа согласно настоящему изобретению.
[0098] На фиг. 4 представлена блок-схема, иллюстрирующая аппарат для регулирования угла съемки камеры в соответствии с иллюстративным вариантом осуществления. Аппарат может быть применен в интеллектуальной камере. Как показано на фиг. 4, аппарат содержит, но без ограничения первый модуль 401 позиционирования, первый модуль 402 регулирования, второй модуль 403 позиционирования и второй модуль 404 регулирования.
[0099] Первый модуль 401 позиционирования выполнен с возможностью определения положения тела человека в диапазоне съемки камеры.
[00100] Первый модуль 402 регулирования выполнен с возможностью регулирования угла съемки камеры в зависимости от положения тела человека, определенного первым модулем 401 позиционирования, таким образом, чтобы изображение тела человека располагалось по центру видеоизображения, снятого камерой.
[00101] Второй модуль 403 позиционирования выполнен с возможностью определения положения лица человека в видеоизображении, снятом камерой.
[00102] Второй модуль 404 регулирования выполнен с возможностью точной настройки угла съемки камеры в зависимости от положения лица человека, определенного вторым модулем 403 позиционирования, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[00103] Суммируя описанное выше, в аппарате для регулирования угла съемки камеры в соответствии с вариантом осуществления настоящего изобретения, определяют положение тела человека в диапазоне съемки камеры, угол съемки камеры регулируют таким образом, чтобы камера ориентировалась на положение тела человека, и затем выполняют точную настройку камеры в зависимости от положения лица человека. Как таковой, угол съемки камеры точно настраивается автоматически в зависимости от положения лица человека, пользователям не нужно вручную регулировать угол съемки камеры, таким образом снижается сложность операций пользователей и повышается точность регулировки угла съемки.
[00104] На фиг. 5 представлена блок-схема, иллюстрирующая аппарат для регулирования угла съемки камеры в соответствии с другим иллюстративным вариантом осуществления. Аппарат может быть применен в интеллектуальной камере. Как показано на фиг. 5, аппарат содержит, но без ограничения, первый модуль 501 позиционирования, первый модуль 502 регулирования, второй модуль 503 позиционирования и второй модуль 504 регулирования.
[00105] Первый модуль 501 позиционирования выполнен с возможностью определения положения тела человека в диапазоне съемки камеры.
[00106] Первый модуль 502 регулирования выполнен с возможностью регулирования угла съемки камеры в зависимости от положения тела человека, определенного первым модулем 501 позиционирования, таким образом, чтобы изображение тела человека располагалось по центру видеоизображения, снятого камерой.
[00107] Второй модуль 503 позиционирования выполнен с возможностью определения положения лица человека в видеоизображении, снятом камерой.
[00108] Второй модуль 504 регулирования выполнен с возможностью точной настройки угла съемки камеры в зависимости от положения лица человека, определенного вторым модулем 503 позиционирования, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[00109] Необязательно, первый модуль позиционирования 501 содержит субмодуль 501a получения звука и субмодуль 501b обнаружения полосы частот.
[00110] Субмодуль 501a получения звука выполнен с возможностью получения звукового сигнала, отправленного от источника звука в диапазоне съемки камеры.
[00111] Субмодуль 501b обнаружения полосы частот выполнен с возможностью обнаружения пребывания полосы частот звукового сигнала, полученного субмодулем 501a получения звука, в пределах предустановленной полосы частот.
[00112] Положение источника звука определено в качестве положения тела человека, если обнаружено, что полоса частот звукового сигнала, полученного субмодулем 501a получения звука, находится в пределах предустановленной полосы частот.
[00113] Необязательно, первый модуль 501 позиционирования дополнительно содержит субмодуль 501c получения инфракрасного сигнала и субмодуль 501d обнаружения спектра.
[00114] Субмодуль 501c получения инфракрасного сигнала выполнен с возможностью получения инфракрасного сигнала, отправленного источником инфракрасного сигнала в диапазоне съемки камеры.
[00115] Субмодуль 501d обнаружения спектра выполнен с возможностью определения соответствия особенностей спектра инфракрасного сигнала, полученного субмодулем 501c получения инфракрасного сигнала, предустановленному спектру.
[00116] Положение источника инфракрасного сигнала определено в качестве положения тела человека, если обнаружено, что особенности спектра инфракрасного сигнала, полученного субмодулем 501c получения инфракрасного сигнала, соответствует предустановленному спектру.
[00117] Необязательно, второй модуль 503 позиционирования содержит субмодуль 503a распознавания мимики лица и первый субмодуль 503b позиционирования.
[00118] Субмодуль 503a распознавания мимики лица выполнен с возможностью выполнения распознавания мимики лица по меньшей мере одного лица человека в видеоизображении, снятом камерой.
[00119] Первый субмодуль 503b позиционирования, выполненный с возможностью определения положения лица человека, мимика лица которого распознана субмодулем 503a распознавания мимики лица, является выделенной мимикой лица, в видеоизображении в качестве положения лица человека.
[00120] Необязательно, второй модуль 503 позиционирования дополнительно содержит субмодуль 503c загрузки изображения, субмодуль 503d получения команды и второй субмодуль 503e позиционирования.
[00121] Субмодуль 503c загрузки изображения выполнен с возможностью загрузки видеоизображения на терминал пользователя, подключенный к камере.
[00122] Субмодуль 503d получения информации выполнен с возможностью получения информации команды выбора, возвращенной терминалом пользователя, при этом информация команды выбора указывает на лицо человека, имеющееся в видеоизображении.
[00123] Второй субмодуль позиционирования 503e выполнен с возможностью определения положения лица человека, указанного информацией команды выбора, полученной субмодулем 503d получения информации в видеоизображении, в качестве положения лица человека.
[00124] Необязательно, аппарат дополнительно содержит модуль 505 обнаружения расстояния.
[00125] Модуль 505 обнаружения расстояния выполнен с возможностью, после произведения точной настройки угла съемки камеры в зависимости от положения лица человека, обнаруживать расстояние, на которое изображение лица человека отклонено от центра видеоизображения, снятого камерой.
[00126] Второй модуль 504 регулирования дополнительно выполнен с возможностью снова производить точную настройку угла съемки камеры в зависимости от положения изображения лица человека, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой, когда обнаружено, что расстояние, на которое центр изображения при положении лица человека отклонен от центра видеоизображения, обнаруженное модулем 505 обнаружения расстояния, превышает предустановленное расстояние.
[00127] Суммируя описанное выше, в аппарате для регулирования угла съемки камеры в соответствии с вариантом осуществления настоящего изобретения, определяют положение тела человека в диапазоне съемки камеры, угол съемки камеры регулируют таким образом, чтобы камера ориентировалась на положение тела человека, и затем выполняют точную настройку камеры в зависимости от положения лица человека. Как таковой, угол съемки камеры точно настраивается автоматически в зависимости от положения лица человека, пользователям не нужно вручную регулировать угол съемки камеры, таким образом снижается сложность операций пользователей и повышается точность регулировки угла съемки.
[00128] Кроме того, применяя способ обнаружения источника звука или инфракрасного сигнала, получают звуковой сигнал или инфракрасный сигнал, отправленный телом человека в диапазоне съемки, и положение тела человека в диапазоне съемки может быть определено на основе предустановленной полосы частот или частотно-временного спектра таким образом, чтобы точно и эффективно можно было отслеживать тело человека в диапазоне съемки. Соответственно, угол съемки камеры может быть отрегулирован с учетом положения тела человека, и можно избежать того, что положение животного или объекта, отличных от тела человека, будет определено как положение тела человека.
[00129] Кроме того, лицо человека, которого снимает камера, может быть определено путем распознавания мимики лица в диапазоне съемки. Альтернативно, камера загружает снятое видеоизображение на терминал пользователя, подключенный к камере; и с помощью получения информации команды выбора от терминала пользователя, может быть определено лицо человека, которого снимают. Соответственно, может быть точно настроен угол съемки. В этой связи, когда в диапазоне съемки присутствует несколько человеческих лиц удобно отрегулировать угол съемки камеры, исходя из потребностей пользователя, таким образом, чтобы лицо человека, которого снимают, отображалось по центру видеоизображения.
[00130] Кроме того, определяется расстояние между центром видеоизображения и изображением лица человека и, если расстояние между центром видеоизображения и изображением лица человека превышает предустановленное расстояние, точно настраивают угол съемки камеры таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, чтобы добиться таким образом лучшего эффекта съемки.
[00131] Аппарат для регулирования угла съемки камеры предоставлен в соответствии с еще одним иллюстративным вариантом осуществления настоящего изобретения. Аппарат может реализовать способ регулирования угла съемки камеры по настоящему изобретению, и содержит процессор и запоминающее устройство, выполненное с возможностью сохранения команд, выполняемых процессором.
[00132] Процессор выполнен с возможностью: определять положение тела человека в диапазоне съемки камеры; регулировать угол съемки камеры в зависимости от положения тела человека, таким образом, чтобы изображение тела человека находилось по центру видеоизображения, снятого камерой; определять положение лица человека в видеоизображении, снятом камерой; и точно настраивать угол съемки камеры, в зависимости от положения лица человека, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
[00133] Необязательно, указанное определение положения тела человека в диапазоне съемки камеры включает: получение звукового сигнала, отправленного от источника звука в диапазоне съемки камеры; обнаружение пребывания полосы частот звукового сигнала в пределах предустановленной полосы частот; и определение положения источника звука в качестве положения тела человека, если обнаружено, что полоса частот звукового сигнала находится в пределах предустановленной полосы частот.
[00134] Необязательно, указанное определение положения тела человека в диапазоне съемки камеры включает: получение инфракрасного сигнала, отправленного источником инфракрасного сигнала в диапазоне съемки камеры; обнаружение соответствия особенностей спектра инфракрасного сигнала предустановленному спектру; и определение положения источника инфракрасного сигнала в качестве положения тела человека, если обнаружено, что особенности спектра инфракрасного сигнала соответствуют предустановленному спектру.
[00135] Необязательно, указанное определение положения лица человека в видеоизображении, снятом камерой, включает: выполнение распознавания мимики лица по меньшей мере одного лица человека в видеоизображении, снятом камерой; и определение положения лица человека, чья мимика лица является выделенной мимикой лица в видеоизображении в качестве положения лица человека.
[00136] Необязательно, указанное определение положения лица человека в видеоизображении, снятом камерой, включает: загрузку видеоизображения на терминал пользователя, подключенный к камере; получение информации команды выбора, возвращенной терминалом пользователя, при этом информация команды выбора указывает на лицо человека, имеющееся в видеоизображении; и определение положения лица человека, указанного информацией команды выбора в видеоизображении, в качестве положения лица человека.
[00137] Необязательно, процессор выполнен с дополнительной возможностью, после точной настройки угла съемки камеры в зависимости от положения лица человека, обнаружения расстояния, на которое изображение лица человека отклонено от центра видеоизображения, снятого камерой; при обнаружении, что расстояние, на которое изображение лица человека отклонено от центра видеоизображения, превышает предустановленное расстояние, повторной точной настройки угла съемки камеры на основе положения изображения лица человека, таким образом, чтобы изображение лица человека располагалось по центру видеоизображения, снятого камерой.
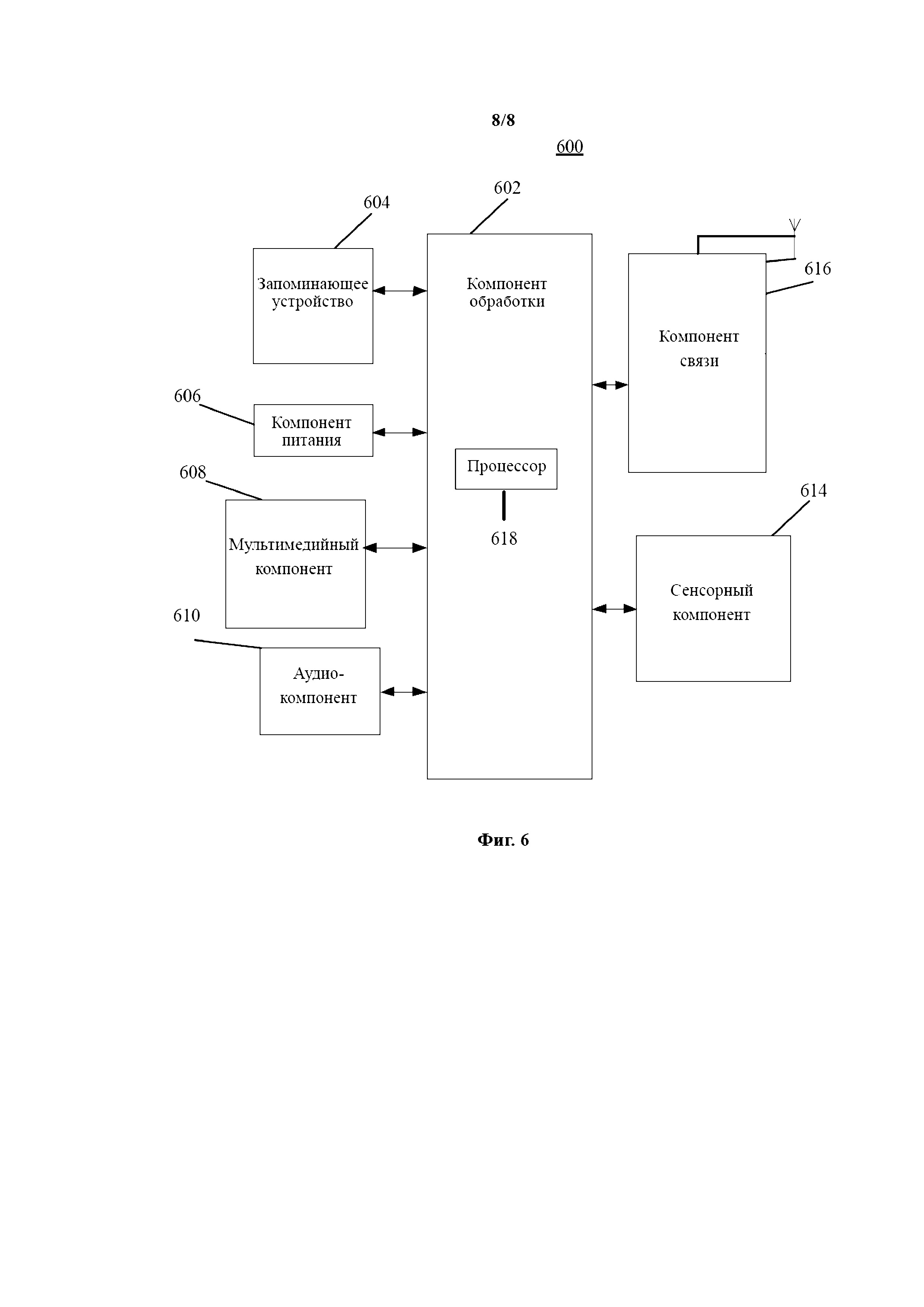
[00138] На фиг. 6 представлена блок-схема, иллюстрирующая аппарат 600 для регулирования угла съемки камеры в соответствии с еще одним иллюстративным вариантом осуществления. Например, аппарат 600 может быть интеллектуальной камерой.
[00139] Как показано на фиг. 6, аппарат 600 может содержать один или более из следующих компонентов: компонент 602 обработки, запоминающее устройство 604, компонент 606 питания, мультимедийный компонент 608, аудиокомпонент 610, сенсорный компонент 614 и компонент 616 связи.
[00140] Компонент 602 обработки, как правило, управляет всеми операциями аппарата 600, такими как операции, связанные с дисплеем, телефонные звонки, передача и преобразование данных, операции с камерой и операции записи. Компонент 602 обработки может содержать один или более процессоров 618 для выполнения команд для осуществления всех стадий или их части в вышеописанных способах. Более того, компонент 602 обработки может содержать один или более модулей, которые способствуют взаимодействию между компонентом 602 обработки и другими компонентами. Например, компонент 602 обработки может содержать мультимедийный модуль для способствования взаимодействию между мультимедийным компонентом 608 и компонентом 602 обработки.
[00141] Запоминающее устройство 604 выполнено с возможностью хранения различных типов данных для поддержки работы аппарата 600. Примеры таких данных включают команды для любых применений или способов, выполняемых на аппарате 600, контактную информацию, данные телефонной книги, сообщения, картинки, видео и т. д. Запоминающее устройство 604 может быть выполнено с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств или их комбинации, таких как статическое запоминающее устройство с произвольной выборкой (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, блок флэш-памяти, магнитный или оптический диск. Память 604 также сохраняет один или несколько модулей, выполненных с возможностью, при выполнении одним или несколькими процессорами 618, выполнять все или часть этапов способа, показанного на фиг. 1, 2A или 3A.
[00142] Компонент 606 питания обеспечивает питание на различные компоненты аппарата 600. Компонент 606 питания может содержать систему управления питанием, один или более источников питания и любые другие компоненты, связанные с генерированием, управлением и распределением питания в аппарате 600.
[00143] Мультимедийный компонент 608 содержит экран, обеспечивающий интерфейс вывода между аппаратом 600 и пользователем. В некоторых вариантах осуществления экран может содержать жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран содержит сенсорную панель, то экран может быть выполнен в виде сенсорного экрана для получения входных сигналов от пользователя. Сенсорная панель содержит один или более сенсоров касания для распознавания касаний, проведения пальцем и жестов на сенсорной панели. Сенсоры касания могут не только распознавать границу прикосновения или проведения пальцем, но также распознавать период времени и силу нажатия, связанные с прикосновением или проведением пальцем. В некоторых вариантах осуществления мультимедийный компонент 608 содержит фронтальную камеру и/или заднюю камеру. Фронтальная камера и/или задняя камера могут получать внешние мультимедийные данные, когда аппарат 600 находится в режиме работы, таком как режим фотосъемки или режим видеосъемки. Каждая из фронтальной и/или задней камер может представлять собой систему с закрепленными оптическими линзами или иметь способность к фокусировке и оптическому приближению.
[00144] Аудиокомпонент 610 выполнен с возможностью вывода и/или ввода звуковых сигналов. Например, аудиокомпонент 610 содержит микрофон (MIC), выполненный с возможностью получения внешнего звукового сигнала, когда аппарат 600 находится в режиме работы, таком как режим вызова, режим записи и режим распознавания голоса. Полученный звуковой сигнал может быть дополнительно сохранен в запоминающем устройстве 604 или передан посредством компонента 616 связи. В некоторых вариантах осуществления аудиокомпонент 610 дополнительно содержит динамик для вывода звуковых сигналов.
[00145] Сенсорный компонент 614 содержит один или более сенсоров для обеспечения оценки состояния различных аспектов аппарата 600. Например, сенсорный компонент 614 может обнаруживать состояние разблокировки/блокировки аппарата 600, относительное расположение компонентов, например, дисплея и клавиатуры, аппарата 600, изменение в положении аппарата 600 или компонента аппарата 600, наличие или отсутствие контакта пользователя с аппаратом 600, ориентацию или ускорение/замедление работы аппарата 600 и изменение в температуре аппарата 600. Сенсорный компонент 614 может содержать сенсор ближней локации, выполненный с возможностью обнаружения присутствия находящихся рядом объектов без какого-либо физического контакта. Сенсорный компонент 614 может также содержать светочувствительный сенсор, такой как сенсор изображения CMOS или CCD, для использования в режимах применения изображений. В некоторых вариантах осуществления сенсорный компонент 614 может также содержать сенсор поворачивания экрана, гиродатчик, магнитный сенсор, сенсор нажатия или температурный сенсор.
[00146] Компонент 616 связи выполнен с возможностью обеспечения связи, проводной или беспроводной, между аппаратом 600 и другими устройствами. Аппарат 600 может иметь доступ к беспроводной сети на основе стандарта связи, такого как Wi-Fi, 2G или 3G или их комбинация. В одном иллюстративном варианте осуществления компонент 616 связи получает переданный сигнал или связанную с передачей информацию от системы управления внешней передачей посредством канала передачи. В одном иллюстративном варианте осуществления компонент 616 связи дополнительно содержит модуль ближней бесконтактной связи (NFC) для обеспечения связи малого радиуса действия.
[00147] В иллюстративных вариантах осуществления аппарат 600 может быть выполнен с одним или более из прикладных специализированных интегральных схем (ASIC), процессоров цифровой обработки данных (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем логических матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов для осуществления вышеописанных способов.
[00148] В иллюстративных вариантах осуществления также предусмотрен энергонезависимый машиночитаемый носитель данных, содержащий команды, такие как заключенные в запоминающем устройстве 604, выполняемые процессором 618 в аппарате 600, для осуществления вышеописанных способов. Например, энергонезависимый машиночитаемый носитель данных может представлять собой ROM, RAM, CD-ROM, магнитную ленту, дискету, устройство хранения оптических данных и тому подобное.
[00149] Относительно аппарата в вышеуказанных вариантах осуществления конкретные пути осуществления операций соответствующими модулями были описаны подробно в вариантах осуществления для способа, и не будут детально описаны дальше.
[00150] Следует понимать, что настоящее изобретение не ограничено точной конструкцией, описанной выше и проиллюстрированной в прилагаемых графических материалах, и что могут быть сделаны различные модификации и изменения в пределах объема настоящего изобретения. Предполагается, что объем настоящего изобретения ограничен только прилагаемой формулой изобретения.
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта
Производные тетрагидроимидазо[1,5-a]пиразина, способ их получения и применение их в медицине
Способ производства метанола, диметилового эфира и низкоуглеродистых олефинов из синтез-газа
Способ производства метанола, диметилового эфира и низкоуглеродистых олефинов из синтез-газа
Соли производных тетерагидро-имидазо[1,5-a]пиразина, способы их получения и их медицинское применение
Способ связи и терминал
Способ и устройство управления интеллектуальным прибором на основе предварительного заданного режима сценария
Производные с-арилглюкозидов, способ их получения и фармацевтическое применение
Способ и устройство для установки задания
Способ и устройство для отображения информации
Способ и устройство для уведомления о статусе

