Результат интеллектуальной деятельности: СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ
Вид РИД
Изобретение
Изобретение относится к машиностроению, а именно к области балансировки тел вращения в динамическом режиме, и может быть использовано для вертикальной одноплоскостной динамической балансировки длинномерных роторов, а именно летательных аппаратов конической формы.
В процессе балансировки высокоскоростного летательного аппарата, стабилизируемого вращением вокруг оси симметрии, корпус которого выполнен в виде «длинного» ротора, в том числе конической формы (конуса, усеченного конуса, оживального конуса), обычно выполняемой на заключительном этапе общей сборки аппарата, стремятся изменить дисбаланс в действующей плоскости коррекции, как правило, единственной, конструктивно расположенной вблизи торца конуса, на значительном расстоянии от центра масс, например, путем прикрепления балансировочного груза (грузов) к этой плоскости с целью приведения параметров массо-инерционной асимметрии контролируемого ротора, к которым относятся величина поперечного смещения центра масс и угол отклонения продольной главной центральной оси инерции (ГЦОИ) относительно оси симметрии (в качестве которой принимается ось симметрии наружной поверхности) ротора, также называемой геометрической осью, к значениям, не превышающим заданных в эксплуатационной документации на ротор предельно-допустимых значений. Если в ходе балансировочного эксперимента выявляется, что задача приведения одновременно двух параметров массо-инерционной асимметрии к значениям, не превышающим заданных предельно-допустимых значений нагружением массой в одной плоскости коррекции невыполнима, то ротор бракуют и направляют на перекомпоновку.
Расчет массы и угла установки балансировочного груза проводят по результатам экспериментального определения указанных параметров массо-инерционной асимметрии с использованием стендового оборудования. Использование динамических балансировочных стендов, обладающих высокой инструментальной точностью, обеспечивает значительное повышение точности определения и приведения к заданным нормативам параметров массо-инерционной асимметрии по сравнению с известными из технической литературы экспериментальными методами с использованием устройств, реализующих, например, методы статической балансировки, физического маятника или крутильных колебаний.
Как правило, в процессе балансировки ротора в одной плоскости коррекции невозможно полностью устранить поперечное смещение центра масс и перекос продольной ГЦОИ относительно геометрической оси ротора. Обычно метод одноплоскостной балансировки применяют для динамической балансировки «коротких» роторов, имеющих одну сосредоточенную массу на валу с целью устранения дисбаланса и, соответственно, смещения центра масс с геометрической оси ротора. При одноплоскостной балансировке длинномерного ротора, масса которого распределена по его длине, задачей экспериментаторов является приведение обоих параметров массо-инерционной асимметрии к значениям, не превышающим заданных предельно-допустимых значений. При решении этой задачи обычно стремятся в первую очередь исключить или минимизировать поперечное смещение центра масс с целью снижения влияния данного параметра на устойчивость движения транспортного средства вокруг центра масс.
Из уровня техники известен способ одноплоскостной балансировки длинномерного ротора в одной плоскости коррекции, описанный в изобретении под названием «Способ балансировки ротора в одной плоскости коррекции» [патент РФ №2499985, G01M 1/16, опуб. 27.11.2013 г.], обеспечивающий определение начальных параметров массо-инерционной асимметрии ротора, расчет массы и угла установки балансировочного груза, прикрепление которого к штатной плоскости коррекции позволяет привести остаточные параметры массо-инерционной асимметрии к значениям, не превышающим заданных предельно-допустимых значений с оптимизацией по критерию достижения минимального значения смещения центра масс относительно геометрической оси ротора. Данный способ принимается за прототип, как наиболее близкий по технической сущности к заявляемому.
Известный способ заключается в том, что в опоры балансировочного стенда устанавливают ротор с заданными предельно-допустимыми значениями параметров массо-инерционной асимметрии - поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно его геометрической оси, имеющий расположенные на торцах две плоскости коррекции, одна из которых - балансировочная, а другая - пробная, и обладающий известными массой, расстояниями от центра масс до плоскостей коррекции, значениями моментов инерции, приводят ротор во вращение, при вращении с постоянной угловой скоростью сначала измеряют амплитуды и фазы вибраций обеих опор, вызванных начальными дисбалансами ротора, затем, поочередно прикрепляя к каждой из плоскостей коррекции пробные грузы, снова измеряют амплитуды и фазы вибраций обеих опор, после определения коэффициентов балансировочной чувствительности стенда и коэффициентов взаимовлияния плоскостей коррекции, а также определения значений и углов векторов начальных дисбалансов в каждой плоскости коррекции, выполняемых по результатам измерений амплитуд и фаз вибраций обеих опор при вращении в опорах ротора, находящегося в исходном состоянии, и ротора, к плоскостям коррекции которого поочередно прикрепляют пробные грузы, рассчитывают начальные значения параметров массо-инерционной асимметрии, и при превышении хотя бы одним из них заданного предельно-допустимого значения, создают балансировочный дисбаланс в балансировочной плоскости коррекции, предварительно произведя расчет его значения и углового положения, при создании балансировочного дисбаланса сначала моделируют появление компенсирующего дисбаланса в балансировочной плоскости коррекции, обеспечивающего исключение начального дисбаланса в этой плоскости коррекции, затем с учетом коэффициента взаимовлияния плоскостей коррекции моделируют появление корректирующего дисбаланса в балансировочной плоскости коррекции, обеспечивающего приведение значений поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно геометрической оси ротора к значениям, не превышающим соответствующих заданных предельно-допустимых значений, после чего определяют остаточные значения параметров массо-инерционной асимметрии, а затем судят о балансировке ротора путем сопоставления остаточных и заданных предельно-допустимых значений параметров массо-инерционной асимметрии.
В данном способе стремятся достигнуть минимально возможного остаточного смещения центра масс относительно геометрической оси ротора. Данный способ позволяет проводить балансировку «длинного» ротора с использованием двух, расположенных на противоположных торцах ротора плоскостей коррекции дисбалансов - штатной плоскости коррекции и дополнительной (пробной) плоскости коррекции, используемой только для установки пробных грузов при определении коэффициентов балансировочной чувствительности и взаимовлияния плоскостей коррекции, с приведением параметров массо-инерционной асимметрии к значениям, не превышающим заданных предельно-допустимых значений.
Однако существуют роторы, для обеспечения динамической устойчивости и, соответственно, эффективности эксплуатации которых более предпочтительным является устранение или минимизация угла отклонения продольной ГЦОИ от геометрической оси.
Недостатком данного способа является невозможность исключить или минимизировать перекос продольной ГЦОИ относительно оси симметрии ротора при одновременном выполнении условия не превышения предельно-допустимого значения смещения центра масс от той же оси, что в ряде случаев необходимо при изготовлении стабилизируемых вращением летательных аппаратов.
Задачей и техническим результатом, на достижение которого направлено предлагаемое изобретение является обеспечение возможности устранения или достижения минимального значения угла отклонения продольной ГЦОИ от геометрической оси ротора в процессе приведения значений параметров его массо-инерционной асимметрии к значениям, не превышающим заданных предельно-допустимых значений.
Указанный технический результат достигается тем, что в способе балансировки ротора в одной плоскости коррекции, заключающийся в том, что в опоры балансировочного стенда устанавливают ротор с заданными предельно-допустимыми значениями параметров массо-инерционной асимметрии - поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно его геометрической оси, имеющий расположенные на торцах две плоскости коррекции, одна из которых - балансировочная, а другая - пробная, и обладающий известными массой, расстояниями от центра масс до плоскостей коррекции, значениями моментов инерции, приводят ротор во вращение, при вращении с постоянной угловой скоростью сначала измеряют амплитуды и фазы вибраций обеих опор, вызванных начальными дисбалансами ротора, затем, поочередно прикрепляя к каждой из плоскостей коррекции пробные грузы, снова измеряют амплитуды и фазы вибраций обеих опор, после определения коэффициентов балансировочной чувствительности стенда и коэффициентов взаимовлияния плоскостей коррекции, а также определения значений и углов векторов начальных дисбалансов в каждой плоскости коррекции, выполняемых по результатам измерений амплитуд и фаз вибраций обеих опор при вращении в опорах ротора, находящегося в исходном состоянии, и ротора, к плоскостям коррекции которого поочередно прикрепляют пробные грузы, рассчитывают начальные значения параметров массо-инерционной асимметрии, и при превышении хотя бы одним из них заданного предельно-допустимого значения, создают балансировочный дисбаланс в балансировочной плоскости коррекции, предварительно произведя расчет его значения и углового положения, при создании балансировочного дисбаланса сначала моделируют появление компенсирующего дисбаланса в балансировочной плоскости коррекции, обеспечивающего исключение начального дисбаланса в этой плоскости коррекции, затем с учетом коэффициента взаимовлияния плоскостей коррекции моделируют появление корректирующего дисбаланса в балансировочной плоскости коррекции, обеспечивающего приведение значений поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно геометрической оси ротора к значениям, не превышающим соответствующих заданных предельно-допустимых значений, после чего определяют остаточные значения параметров массо-инерционной асимметрии, а затем судят о балансировке ротора путем сопоставления остаточных и заданных предельно-допустимых значений параметров массо-инерционной асимметрии, согласно изобретению, с использованием параметров компенсирующего и корректирующего дисбалансов рассчитывают параметры балансировочного дисбаланса, по значению которых определяют массу и угловое положение балансировочного груза, обеспечивающее исключение или минимизацию угла отклонения продольной ГЦОИ от оси симметрии, затем проводят корректировку массы ротора, прикрепив балансировочный груз к балансировочной плоскости в рассчитанном угловом положении, соответствующем угловому положению балансировочного дисбаланса.
Произведение расчета параметров балансировочного дисбаланса с использованием параметров компенсирующего и корректирующего дисбалансов, по значению которых определяют массу и угловое положение балансировочного груза, обеспечивающее исключение или минимизацию угла отклонения продольной ГЦОИ от оси симметрии, а также дальнейшее проведение корректировки массы ротора путем прикрепления балансировочного груза к балансировочной плоскости в рассчитанном угловом положении, соответствующем угловому положению балансировочного дисбаланса, обеспечивает исключение или, по крайней мере, достижение минимального угла отклонения продольной ГЦОИ относительно геометрической оси ротора.
Способ позволяет определить начальные параметры массо-инерционной асимметрии и, при превышении хотя бы одним из них заданного предельно-допустимого значения, расчетным путем подтвердить или опровергнуть возможность достижения значений параметров массо-инерционной асимметрии, не превышающих предельно-допустимых значений. В случае подтверждения такой возможности, способ позволяет привести оба параметра к значениям, не превышающим предельно-допустимых значений, с обеспечением минимального угла остаточного отклонения продольной ГЦОИ относительно геометрической оси ротора. Моделирование балансировочных дисбалансов и параметров балансировочного груза (грузов) с использованием коэффициентов взаимовлияния плоскостей коррекции, исключает необходимость осуществления дополнительных шагов балансировки, что позволяет сократить общее время балансировочного эксперимента.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами:
На фиг. 1 приведена расчетная схема вертикального ротора 1 с действующими в двух - балансировочной (В) и пробной (Н) - плоскостях коррекции дисбалансами. Также показаны параметры массо-инерционной асимметрии - поперечное смещения центра масс ρ и угол  отклонения продольной ГЦОИ относительно геометрической оси несбалансированного ротор, - наличие которой обуславливает появление дисбалансов
отклонения продольной ГЦОИ относительно геометрической оси несбалансированного ротор, - наличие которой обуславливает появление дисбалансов  в балансировочной и
в балансировочной и  в пробной плоскостях коррекции при вращении ротора в опорах 2 и 3 вокруг оси симметрии 4.
в пробной плоскостях коррекции при вращении ротора в опорах 2 и 3 вокруг оси симметрии 4.
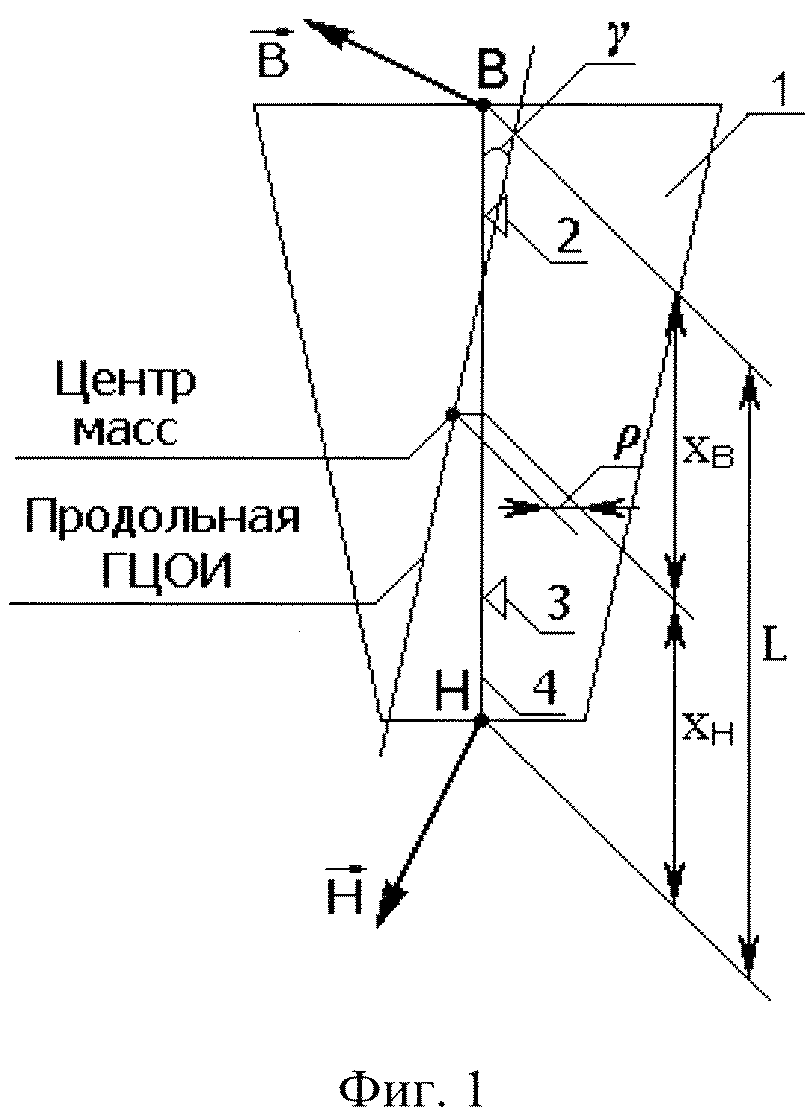
На фиг. 2 показаны векторные диаграммы дисбалансов действующих в плоскостях коррекции в процессе и после приведения значений параметров массо-инерционной асимметрии ротора к значениям, не превышающим заданных предельно-допустимых значений.
Способ реализуется следующим образом.
Способ может быть реализован как на горизонтальном, так и на вертикальном балансировочном стенде. Способ применим для балансировки конических роторов в случае использования дополнительной технологической оснастки, обеспечивающей материализацию пробной плоскости коррекции. В опоры балансировочного стенда устанавливают ротор 1 с заданными предельно-допустимыми значениями параметров массо-инерционной асимметрии -поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно его геометрической оси, имеющий расположенные на торцах две плоскости коррекции, одна из которых - балансировочная, а другая - пробная, и обладающий известными массой, расстояниями от центра масс до плоскостей коррекции, значениями моментов инерции. Приводят ротор во вращение. При вращении с постоянной угловой скоростью сначала измеряют амплитуды и фазы вибраций обеих опор, вызванных начальными дисбалансами ротора 1. Затем, поочередно прикрепляя к каждой из плоскостей коррекции пробные грузы, снова измеряют амплитуды и фазы вибраций обеих опор.
Используя значения и угловые положения начальных дисбалансов, а также известные массу, расстояния от центра масс до плоскостей коррекции В и Н, значения аксиального и экваториального моментов инерции ротора 1, находят начальные значения радиуса-вектора поперечного смещения центра масс  и вектора-угла
и вектора-угла  отклонения продольной ГЦОИ относительно геометрической оси 4 (на фиг. 1) ротора 1 (не показан), по формулам:
отклонения продольной ГЦОИ относительно геометрической оси 4 (на фиг. 1) ротора 1 (не показан), по формулам:
где М - масса ротора;
 - вектор начального дисбаланса, действующего в балансировочной плоскости коррекции В радиусом rв;
- вектор начального дисбаланса, действующего в балансировочной плоскости коррекции В радиусом rв;
 - вектор начального дисбаланса, действующего в пробной плоскости коррекции Н радиусом rн;
- вектор начального дисбаланса, действующего в пробной плоскости коррекции Н радиусом rн;
хв - расстояние от центра масс ротора 1 до балансировочной плоскости коррекции В;
хн - расстояние от центра масс ротора 1 до пробной плоскости коррекции H;
Iэ - экваториальный момент инерции ротора 1;
Iа - аксиальный момент инерции ротора 1.
Если величина поперечного смещения центра масс ρнач и угол γиач отклонения продольной ГЦОИ от геометрической оси 4 ротора 1 не превышают заданных предельно-допустимых значений (т.е. если выполняются неравенства ), то балансировочный эксперимент завершают и оформляют протокол балансировки, в котором указывают полученные значения массо-инерционной асимметрии.
), то балансировочный эксперимент завершают и оформляют протокол балансировки, в котором указывают полученные значения массо-инерционной асимметрии.
В случае если значение, хотя бы одного из указанных начальных параметров массо-инерционной асимметрии ротора 1 превышает соответствующее предельно-допустимое значение, или если требуется уменьшить величину смещения центра масс с геометрической оси ротора, то изменяют дисбаланс в балансировочной плоскости коррекции В, создав балансировочный дисбаланс  путем установки в этой плоскости коррекции балансировочного груза. Массу и угол установки балансировочного груза определяют с использованием значения и углового положения вектора дисбаланса
путем установки в этой плоскости коррекции балансировочного груза. Массу и угол установки балансировочного груза определяют с использованием значения и углового положения вектора дисбаланса 
Для определения параметров вектора балансировочного дисбаланса сначала устраняют действие начального дисбаланса  в балансировочной плоскости коррекции В, путем моделирования в этой плоскости компенсирующего дисбаланса
в балансировочной плоскости коррекции В, путем моделирования в этой плоскости компенсирующего дисбаланса  , равного по значению, но противоположного по направлению начальному дисбалансу
, равного по значению, но противоположного по направлению начальному дисбалансу  компенсирующего действие дисбаланса В в указанной плоскости коррекции. В результате геометрическая ось 4 и продольная ГЦОИ ротора 1 будут приведены к режиму квазистатической неуравновешенности, когда указанные оси пересекаются не в центре масс. При этом в пробной плоскости коррекции возникнет дополнительный дисбаланс
компенсирующего действие дисбаланса В в указанной плоскости коррекции. В результате геометрическая ось 4 и продольная ГЦОИ ротора 1 будут приведены к режиму квазистатической неуравновешенности, когда указанные оси пересекаются не в центре масс. При этом в пробной плоскости коррекции возникнет дополнительный дисбаланс  образовавшийся в результате влияния балансировочной плоскости коррекции В с действующим в этой плоскости дисбалансом
образовавшийся в результате влияния балансировочной плоскости коррекции В с действующим в этой плоскости дисбалансом  на пробную плоскость коррекции Н, значение которого находят по формуле:
на пробную плоскость коррекции Н, значение которого находят по формуле:

где Кнв - коэффициент влияния балансировочной плоскости коррекции В на пробную плоскость коррекции Н при наличии дисбаланса в балансировочной плоскости коррекции В, а угловое положение дисбаланса  , будет противоположным угловому положению дисбаланса
, будет противоположным угловому положению дисбаланса  .
.
После определения параметров дополнительного дисбаланса  находят значение и угловое положение компенсирующего дисбаланса
находят значение и угловое положение компенсирующего дисбаланса  , который начнет действовать в пробной плоскости коррекции Н в результате появления компенсирующего дисбаланса
, который начнет действовать в пробной плоскости коррекции Н в результате появления компенсирующего дисбаланса , путем геометрического сложения векторов двух дисбалансов, действующих в этой плоскости, - начального
, путем геометрического сложения векторов двух дисбалансов, действующих в этой плоскости, - начального  и дополнительного
и дополнительного  - по формуле:
- по формуле:

Затем моделируют создание корректирующего дисбаланса  в балансировочной плоскости коррекции, со-направленного дисбалансу
в балансировочной плоскости коррекции, со-направленного дисбалансу  , для приведения ротора 1 к режиму статической уравновешенности, т.е. продольная ГЦОИ параллельна геометрической оси ротора:
, для приведения ротора 1 к режиму статической уравновешенности, т.е. продольная ГЦОИ параллельна геометрической оси ротора:
При этом в пробной плоскости коррекции, с учетом коэффициента взаимовлияния плоскостей коррекции, возникает дисбаланс  , равный по значению и по направлению дисбалансу
, равный по значению и по направлению дисбалансу  , значение которого определяют по формуле:
, значение которого определяют по формуле:

где значение дополнительного дисбаланса  противоположного дисбалансу
противоположного дисбалансу  , возникающему в плоскости коррекции Н в результате действия дисбаланса
, возникающему в плоскости коррекции Н в результате действия дисбаланса  , определяют по формуле:
, определяют по формуле:

Равенство значений эквиполентных дисбалансов  и
и  обеспечивает перевод ротора в режим статической неуравновешенности с исключением перекоса продольной ГЦОИ относительно геометрической оси ротора.
обеспечивает перевод ротора в режим статической неуравновешенности с исключением перекоса продольной ГЦОИ относительно геометрической оси ротора.
Далее рассчитывают предполагаемое значение ρкорр величины смещения центра масс с геометрической оси 4 ротора 1 в режиме статической неуравновешенности по формуле:
В случае выполнения условия  , определяют значение ВБАЛ и угловое положение вектора балансировочного дисбаланса
, определяют значение ВБАЛ и угловое положение вектора балансировочного дисбаланса  , используя соответствующие параметры смоделированных в балансировочной плоскости коррекции В векторов дисбалансов
, используя соответствующие параметры смоделированных в балансировочной плоскости коррекции В векторов дисбалансов  и
и  .
.
С использованием параметров компенсирующего и корректирующего дисбалансов, рассчитывают параметры балансировочного дисбаланса, по значению которых определяют массу и угловое положение балансировочного груза, установка которого на балансировочную плоскость коррекции обеспечивает исключение или минимизацию угла отклонения продольной ГЦОИ от геометрической оси 4 ротора 1.
Для определения массы и угла установки балансировочного груза используют формулы:


где αКОМП - угловое положение дисбаланса  , а αКОРР - угловое положение дисбаланса
, а αКОРР - угловое положение дисбаланса  Далее проводят корректировку массы ротора, прикрепив балансировочный груз к балансировочной плоскости В в рассчитанном угловом положении, соответствующем угловому положению балансировочного дисбаланса
Далее проводят корректировку массы ротора, прикрепив балансировочный груз к балансировочной плоскости В в рассчитанном угловом положении, соответствующем угловому положению балансировочного дисбаланса  , обеспечив тем самым приведение обоих параметров массо-инерционной асимметрии к значениям, не превышающим предельно-допустимых, при этом устранив перекос продольной ГЦОИ относительно геометрической оси 4.
, обеспечив тем самым приведение обоих параметров массо-инерционной асимметрии к значениям, не превышающим предельно-допустимых, при этом устранив перекос продольной ГЦОИ относительно геометрической оси 4.
В случае, когда значение ρКОРР будет превышать предельно-допустимое значение  рассчитывают предполагаемое минимально возможное значение
рассчитывают предполагаемое минимально возможное значение  угла отклонения продольной ГЦОИ относительно геометрической оси 4, которое может быть достигнуто путем изменения дисбаланса в балансировочной плоскости коррекции В при уменьшении величины поперечного смещения центра масс ротора 1 до предельно-допустимого значения по формуле:
угла отклонения продольной ГЦОИ относительно геометрической оси 4, которое может быть достигнуто путем изменения дисбаланса в балансировочной плоскости коррекции В при уменьшении величины поперечного смещения центра масс ротора 1 до предельно-допустимого значения по формуле:
В случае если полученное значение γмин будет превышать заданное предельно-допустимое значение  балансировочный эксперимент прекращают, а ротор 1 бракуют и направляют изготовителю на перекомпоновку, поскольку доказана невозможность одновременного приведения величины смещения центра масс и угла отклонения продольной ГЦОИ относительно геометрической оси 4 ротора 1 к значениям, не превышающим заданных предельно-допустимых значений. В ином случае, то есть если неравенство
балансировочный эксперимент прекращают, а ротор 1 бракуют и направляют изготовителю на перекомпоновку, поскольку доказана невозможность одновременного приведения величины смещения центра масс и угла отклонения продольной ГЦОИ относительно геометрической оси 4 ротора 1 к значениям, не превышающим заданных предельно-допустимых значений. В ином случае, то есть если неравенство  окажется верным, то определяют значение вектора дисбаланса
окажется верным, то определяют значение вектора дисбаланса  , коллинеарного по отношению к дисбалансу
, коллинеарного по отношению к дисбалансу  и обеспечивающего достижение значения γмин, по формуле
и обеспечивающего достижение значения γмин, по формуле  ,
,
при этом, положительный результат расчета будет означать, что направления этих дисбалансов совпадают, а отрицательный - наоборот, что их направления противоположны. Ввиду взаимовлияния плоскостей коррекции, в плоскости коррекции Н появится дисбаланс  , коллинеарный дисбалансу
, коллинеарный дисбалансу  . Значение дисбаланса
. Значение дисбаланса  определяют по формуле
определяют по формуле

где  - есть дополнительный дисбаланс (на чертеже не показан), коллинеарный дисбалансу
- есть дополнительный дисбаланс (на чертеже не показан), коллинеарный дисбалансу  и появляющийся в плоскости коррекции Н в результате действия дисбаланса
и появляющийся в плоскости коррекции Н в результате действия дисбаланса  в плоскости коррекции В, по формуле:
в плоскости коррекции В, по формуле:

Затем определяют значение  и угловое положение
и угловое положение  вектора балансировочного дисбаланса
вектора балансировочного дисбаланса  используя соответствующие параметры смоделированных в балансировочной плоскости коррекции В векторов дисбалансов
используя соответствующие параметры смоделированных в балансировочной плоскости коррекции В векторов дисбалансов  и
и  После чего определяют массу балансировочного груза
После чего определяют массу балансировочного груза  установка которого производят в угловом положении соответствующем угловому положению
установка которого производят в угловом положении соответствующем угловому положению  . Для определения значения балансировочного дисбаланса, массы и угла установки балансировочного груза используют формулы:
. Для определения значения балансировочного дисбаланса, массы и угла установки балансировочного груза используют формулы:

где  - угловое положение дисбаланса
- угловое положение дисбаланса  ;
;

После чего проводят корректировку массы ротора 1, прикрепив балансировочный груз к балансировочной плоскости В, и выполняют контрольный пуск ротора для подтверждения правильности проведенного расчета, в котором определяют параметры остаточных дисбалансов  и
и  действующих соответственно в плоскостях В и Н после установки балансировочного груза, и рассчитывают остаточные параметры массо-инерционной асимметрии по формулам:
действующих соответственно в плоскостях В и Н после установки балансировочного груза, и рассчитывают остаточные параметры массо-инерционной асимметрии по формулам:

где m - масса балансировочного груза, прикрепленного к штатной плоскости коррекции;
При такой последовательности действий обеспечивается исключение перекоса продольной ГЦОИ или, по крайней мере, достижение минимального угла отклонения продольной ГЦОИ от геометрической оси ротора в процессе приведения одновременно двух параметров массо-инерционной асимметрии ротора - величины поперечного смещения центра масс и угла отклонения продольной ГЦОИ - к значениям, не превышающим их предельно-допустимых значений, задаваемых в эксплуатационной документации на ротор, а также повышается точность вычисления массы и углового положения балансировочного груза. Способ позволяет повысить производительность процесса балансировки, так как позволяет сократить число шагов балансировки до одного шага и, соответственно, сократить время балансировки ротора.
Экспериментальное опробование, проведенное на вертикальном балансировочном стенде с опорами, выполненными в виде конических газостатических подшипников, подтвердило высокую точность и эффективность способа. В случае использования дополнительной технологической оснастки, обеспечивающей материализацию пробной плоскости коррекции, измерение параметров вибрации опор в исходном состоянии проводят в двух фиксированных угловых положениях балансируемого ротора относительно оснастки, отличающихся друг от друга на 180 градусов. При этом полученные результаты измерений усредняют, выделяя дисбалансы балансируемого ротора, что позволяет уменьшить погрешности, связанные с неидеальностью изготовления сопрягаемых поверхностей ротора и оснастки, возможным перекосом оси симметрии ротора относительно оси вращения технологической оснастки в опорах.
Прикрепление пробных грузов дважды к каждой из плоскостей коррекции в двух взаимно-противоположных угловых положениях, с последующим усреднением результатов измерений позволяет уменьшить погрешности, вызванные возможным поперечным смещением центров плоскостей коррекции с оси вращения, связанные со смещением центров окружностей, по которым расположены места для установки балансировочных и пробных грузов, и погрешности, вызванные не горизонтальным положением штатной плоскости коррекции ротора в связи с возможным перекосом его геометрической оси относительно оси вращения в опорах после соединения ротора с технологической оснасткой.
Способ может быть многократно воспроизведен и реализован на динамических балансировочных стендах как с вертикальной, так и с горизонтальной осью вращения, и позволяет автоматизировать процесс балансировки роторов с использованием современных компьютерных технологий обработки экспериментальных данных и управления технологическим оборудованием стенда.
Таким образом, представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- средство, воплощающее заявляемый способ при его осуществлении, относится к области балансировки тел вращения в динамическом режиме, и может быть использовано для вертикальной одноплоскостной динамической балансировки длинномерных роторов, а именно летательных аппаратов конической формы;
- обеспечение возможности устранения или достижения минимального значения угла отклонения продольной ГЦОИ от геометрической оси ротора в процессе приведения значений параметров его массо-инерционной асимметрии к значениям, не превышающим заданных предельно-допустимых значений;
- для заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
Способ балансировки ротора в одной плоскости коррекции, заключающийся в том, что в опоры балансировочного стенда устанавливают ротор с заданными предельно-допустимыми значениями параметров массо-инерционной асимметрии - поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно его геометрической оси, имеющий расположенные на торцах две плоскости коррекции, одна из которых - балансировочная, а другая - пробная, и обладающий известными массой, расстояниями от центра масс до плоскостей коррекции, значениями моментов инерции, приводят ротор во вращение, при вращении с постоянной угловой скоростью сначала измеряют амплитуды и фазы вибраций обеих опор, вызванных начальными дисбалансами ротора, затем, поочередно прикрепляя к каждой из плоскостей коррекции пробные грузы, снова измеряют амплитуды и фазы вибраций обеих опор, после определения коэффициентов балансировочной чувствительности стенда и коэффициентов взаимовлияния плоскостей коррекции, а также определения значений и углов векторов начальных дисбалансов в каждой плоскости коррекции, выполняемых по результатам измерений амплитуд и фаз вибраций обеих опор при вращении в опорах ротора, находящегося в исходном состоянии, и ротора, к плоскостям коррекции которого поочередно прикрепляют пробные грузы, рассчитывают начальные значения параметров массо-инерционной асимметрии, и при превышении хотя бы одним из них заданного предельно-допустимого значения, создают балансировочный дисбаланс в балансировочной плоскости коррекции, предварительно произведя расчет его значения и углового положения, при создании балансировочного дисбаланса сначала моделируют появление компенсирующего дисбаланса в балансировочной плоскости коррекции, обеспечивающего исключение начального дисбаланса в этой плоскости коррекции, затем с учетом коэффициента взаимовлияния плоскостей коррекции моделируют появление корректирующего дисбаланса в балансировочной плоскости коррекции, обеспечивающего приведение значений поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно геометрической оси ротора к значениям, не превышающим соответствующих заданных предельно-допустимых значений, после чего определяют остаточные значения параметров массо-инерционной асимметрии, а затем судят о балансировке ротора путем сопоставления остаточных и заданных предельно-допустимых значений параметров массо-инерционной асимметрии, отличающийся тем, что с использованием параметров компенсирующего и корректирующего дисбалансов рассчитывают параметры балансировочного дисбаланса, по значению которых определяют массу и угловое положение балансировочного груза, обеспечивающее исключение или минимизацию угла отклонения продольной ГЦОИ от оси симметрии, затем проводят корректировку массы ротора, прикрепив балансировочный груз к балансировочной плоскости в рассчитанном угловом положении, соответствующем угловому положению балансировочного дисбаланса.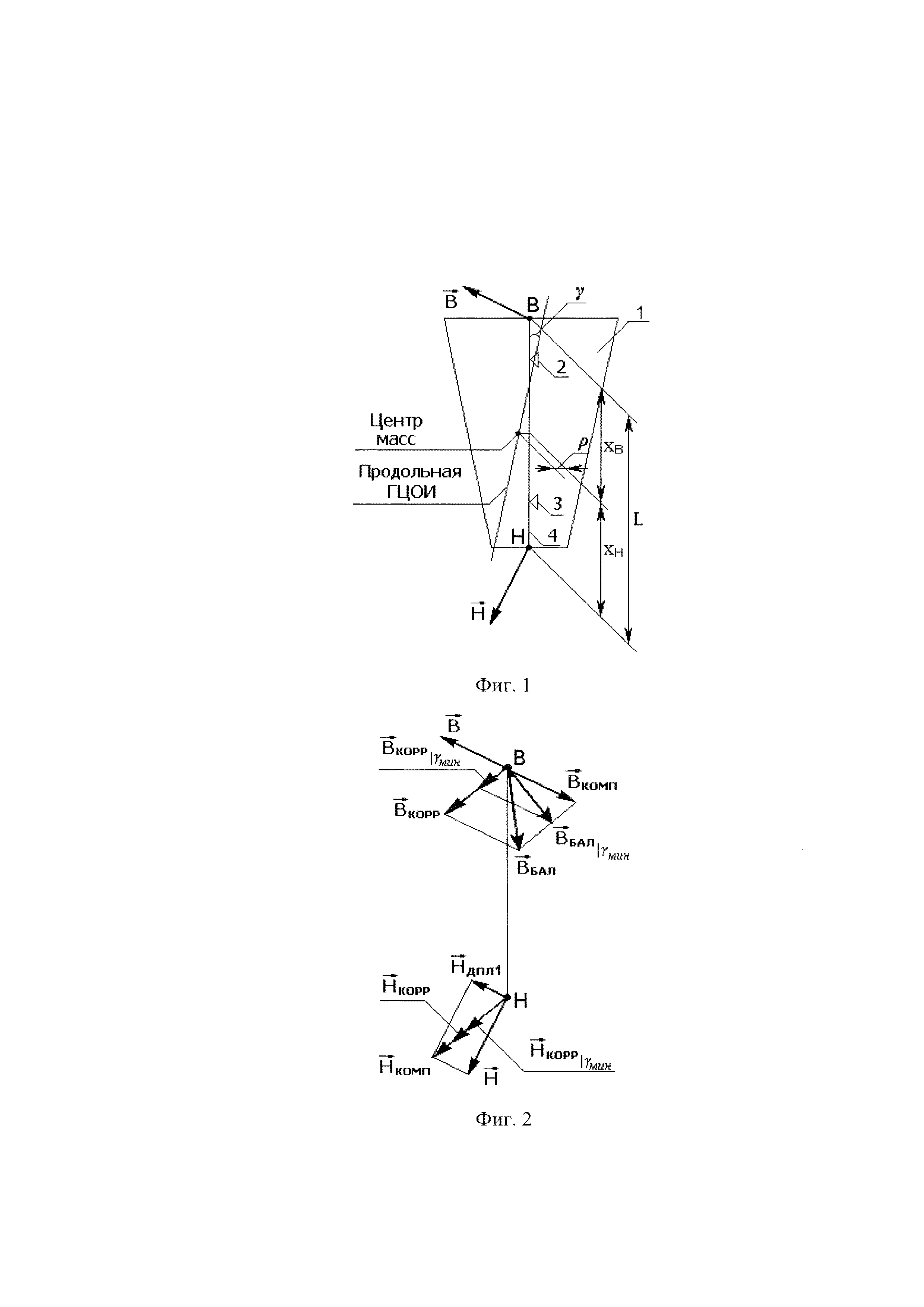
Способ измерения энергетических спектров импульсного гамма-излучения
Устройство формирования компактного элемента
Способ определения сплошности покрытия изделия
Интерферометр
Установка для испытаний металлического урана
Переход волоконно-оптический
Система параметрической гидролокации с функцией получения акустического изображения целей
Затвор люка камеры
Складываемая аэродинамическая поверхность
Контактный датчик
Способ балансировки ротора в одной плоскости коррекции
Высоковольтный плазмотрон
Балансировочный стенд с вертикальной осью вращения
Способ балансировки ротора
Способ проверки качества функционирования стенда для определения массо-центровочных и массо-инерционных характеристик твердого тела вращения

