Результат интеллектуальной деятельности: Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки
Вид РИД
Изобретение
Предлагаемое изобретение относится к радиолокации, а именно к способу определения местоположения наземных целей наземной пространственно распределенной радионавигационной системой (РНС), содержащей передатчики опорных станций РНС, наземный приемник, в которой для подсвета целей используются сигналы передатчиков РНС.
Радионавигационная система «передатчики - цели - приемник» решает задачу, связанную с объединением в приемнике информации, поступающей от нескольких передатчиков при радиолокационном наблюдении нескольких целей. Эта задача состоит в отождествлении измеряемых параметров с соответствующими целями и определении местоположения этих целей.
В радиолокации весьма обширный и важный класс лоцируемых объектов составляют источники радиоизлучений, наблюдение за которыми осуществляется приемниками, принимающими излучаемые радиосигналы. Широкое применение на практике нашли многопозиционные системы, описанные в [1]. В этом источнике рассматриваются методы определения пространственного положения одной цели: эллиптический, гиперболический, триангуляционный, а такие их сочетания. Но отсутствуют сведения о позиционных измерениях и определении местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки и не решается задача отождествления измерений.
Известны также способы многопозиционной радиолокации [2, 3].
В [2] предложен способ многопозиционной радиолокации, заключающийся в излучении радиолокационных сигналов, синхронизированном приеме отраженных сигналов аппаратурой разнесенных позиций, объединении и совместной обработке принятых сигналов и информации разнесенных позиций, полученной от других радиолокационных средств. Аппаратурой разнесенных позиций, подключенной с помощью аппаратуры высокочастотного присоединения к линиям электропередачи (ЛЭП), осуществляют синхронизированные излучение и прием сигналов с использованием ЛЭП, затем при обработке полученной информации осуществляют корректировку информации, полученной в результате обработки сигналов, принятых с ЛЭП, посредством сопоставления ее с сигналами, отраженными от целей, полученными аппаратурой разнесенных позиций, и с информацией, полученной аппаратурой разнесенных позиций от других радиолокационных средств. Но в этом способе отсутствуют математические выражения, позволяющие определить местоположение целей и провести отождествление измерений в многоцелевой обстановке.
В [3] предложена многопозиционная система определения местоположения воздушных судов, содержащая наземный радиозапросчик и самолетный ответчик, соединенные линией запроса, не менее трех приемников ответных сигналов, соединенных с самолетным ответчиком по линиям ответа, ЭВМ с модулем расчета координат воздушного судна, выполненным с учетом измерения высоты полета и разности дальностей до воздушного судна относительно местоположения запросчика и др. В этой системе отождествление воздушных судов осуществляется по кодированному ответному сигналу, содержащему в общем виде информацию о бортовом номере, высоте, запасе топлива. Однако при отсутствии ответного сигнала отождествление измерений становится невозможным.
Задачей предлагаемого способа является отождествление позиционных измерений и определение местоположения нескольких наземных целей радионавигационной системой по измерениям сумм расстояний от наземных целей до передатчиков опорной станции РНС и наземного приемника, координаты которых известны. При этом в наземном приемнике неизвестна информация о принадлежности измеренных расстояний той или иной наземной цели.
Поставленная задача решается способом осуществляющим:
- излучение навигационных сигналов передатчиками опорных станций распределенной радионавигационной системой (РНС) с известными координатами (xn, yn), (n=1, 2, …, N), которые рассеиваются наземными целями с искомыми координатами хцm, уцm (m=1, 2, …, М), наземным приемником с известными координатами (x0, y0), синхронизированного с передатчиками опорных станций РНС, по сигналам, рассеянным наземными целями, измеряет расстояния Rnm «n-й передатчик - m-я цель - приемник»;
- задание для обзора пространства возможного расположения целей задаются координаты виртуальной наземной цели xц(k), yц(k), k=1, 2, …, K являющихся центрами областей регулярной структуры, вписанной в область ответственности РНС;
- формирование для каждого n-го передатчика (n=1, 2, …, N), регистрируемого в приемнике, формирование М уравнений, соответствующих М целям
где εn - погрешность измерения расстояний;
- выбор из этих уравнений, соответствующее цели с номером  , для которой модуль разности
, для которой модуль разности  между виртуальным и измеренным расстоянием «n-й передатчик - m-я цель - приемник» будет минимальным;
между виртуальным и измеренным расстоянием «n-й передатчик - m-я цель - приемник» будет минимальным;
- формирование суммы минимальных значений модулей разностей, соответствующих виртуальной цели  ;
;

- выбор координаты, после расчета модулей разностей Δk, в качестве координат каждой из М целей соответствующие М минимальным значениям этих модулей, при этом набор из М векторов, каждый из которых включает N измерений Rnm, обеспечивающий минимум Δk (k=1, 2, …, K) являющимся результатом первичного отождествления позиционных измерений в наземной пространственно распределенной радионавигационной системе.
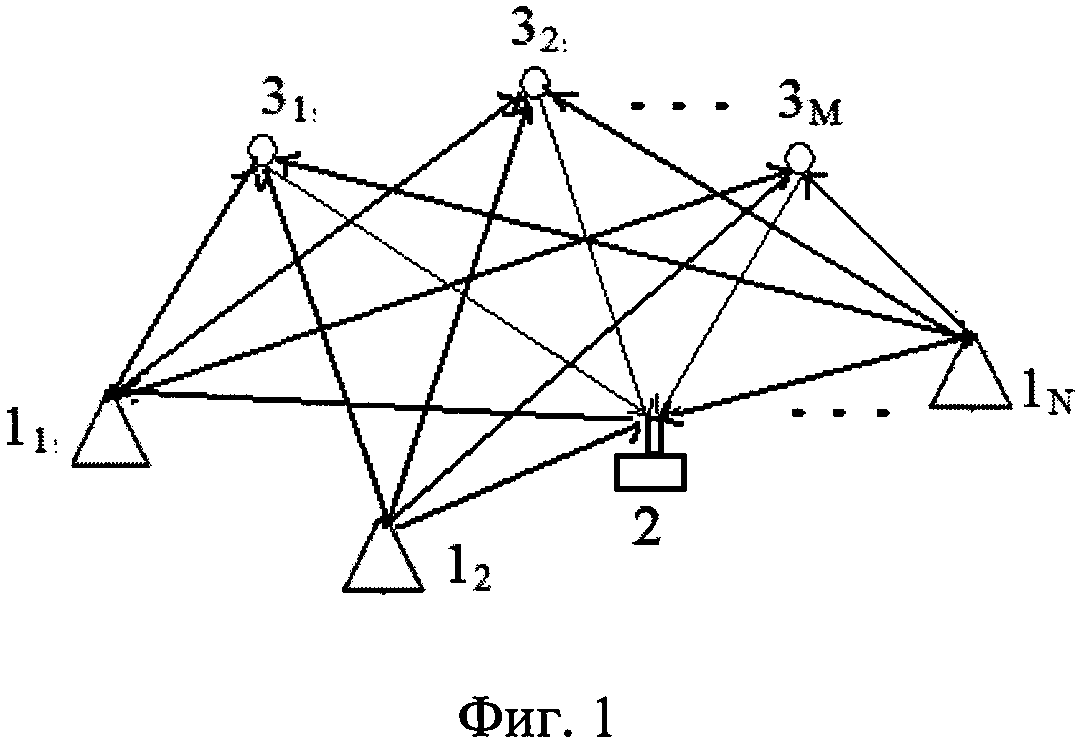
На Фиг. 1 приведена функциональная схема наземной пространственно распределенной РНС «передатчики - цели - приемник».
Наземная пространственно распределенная РНС состоит из наземных передатчиков опорных станций 11, 12, …, 1N, с известными координатами (xn, yn), (n=1, 2, …, N) и наземного радиоприемника 2 с известными координатами (x0, y0).
Наземные передатчики опорных станций 11, 12, …, 1N излучают навигационные сигналы, которые рассеиваются наземными целями 31, 32, …, 3М с искомыми координатами (xmц, ymц), (m=1, 2, …, М).
Наземный приемник 2 с известными координатами (х0, у0), синхронизированный с наземными передатчиками опорных станций 11, 12, …, 1N, наряду с навигационными сигналами, распространяющимися вдоль прямого пути «n-й передатчик - приемник» принимает навигационные сигналы, рассеянные наземными целями 31, 32, …, 3М, находящимися в зоне действия наземной пространственно распределенной РНС.
При приеме слабого рассеянного навигационного сигнала осуществляется компенсация мощного навигационного сигнала прямого распространения, играющего роль структурно-детерминированной помехи. Для этого при приеме смеси мощного прямого навигационного сигнала и слабого навигационного сигнала, рассеянного целью, осуществляется процедура обнаружения мощного прямого сигнала, формируется точная копия этого сигнала и вычитается из записанной входной смеси [4].
Далее наземный приемник 2, синхронизированный с наземными передатчиками опорных станций 11, 12, …, 1N, измеряет расстояния Rnm «n-й передатчик - m-я цель - приемник». Однако в наземном приемнике 2, неизвестно какой из m-ой наземной цели 31, 32, …, 3М принадлежит расстояние «n-й передатчик - m-я цель - приемник». Из-за этого возникает большое число возможных вариантов координат наземных целей 31, 32, …, 3М.
В ходе процесса первичного отождествления результатов измерений в наземной пространственно распределенной РНС необходимо измерения расстояний, проведенные по навигационным сигналам, рассеянным наземными целями 31, 32, …, 3М и принятым в наземном приемнике 2, поставить в соответствие нужной наземной цели 31, 32, …, 3М и грубо определить ее координаты.
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки основан на виртуальном обзоре пространства возможного расположения наземных целей 31 32, …, 3М по координатам x и у с шагом, соответствующим разрешающей способности наземной пространственно распределенной РНС. При этом на каждом k-ом шаге сканирования задаются предполагаемые координаты хц(k) и уц(k) виртуальной цели 31, 32, …, 3М.
Для заданных координат хц(k) и уц(k) для каждого n-го передатчика составим систему уравнений, в которой координаты виртуальной цели хц(k) и уц(k) связываются с измеренными расстояниями Rnm вдоль трассы распространения «n-й передатчик - m-я цель - приемник» с помощью М приближенных уравнений

где εn, n=1, 2, …, N - погрешность измерения расстояний.
Перепишем уравнения (1) в виде разностей между левой и правой частями, т.е в виде разностей между виртуальными и измеренными расстояниями «n-й передатчик - m-я цель - приемник». При этом для каждого n-го передатчика, регистрируемого в приемнике, получим М уравнений, соответствующих М целям

Из этих уравнений выбираем уравнение, соответствующее цели с номером  , для которой модуль разности
, для которой модуль разности  между виртуальными и измеренными расстояниями «n-й передатчик - m-я цель - приемник» будет минимальным.
между виртуальными и измеренными расстояниями «n-й передатчик - m-я цель - приемник» будет минимальным.
Формируем сумму минимальных значений модулей разностей, соответствующих виртуальным целям 

Эта сумма будет иметь минимальное значение, когда координаты хц(k) и уц(k) виртуальной цели будут близки к координатам (хцm, уцm), истинной цели 3m и измеренные приемником 2 расстояния  , обеспечивающие минимум Δk, будут принадлежать этой цели.
, обеспечивающие минимум Δk, будут принадлежать этой цели.
То есть критерием наличия М целей в точках их возможного расположения (хц(k), уц(k)), будет М минимальных значений сумм  из К возможных.
из К возможных.
Таким образом, после расчета сумм модулей разностей Δk координатами М целей выбираются координаты, соответствующие М минимальным значениям этих сумм модулей, при этом набор из М векторов, каждый из которых включает N измерений , обеспечивающих минимум Δk, является результатом первичного отождествления позиционных измерений в наземной пространственно распределенной радионавигационной системе.
Литература
1. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993, стр. 73-74, 392-396].
2. Патент 2332684 РФ, МПК G01S 10/00. Способ многопозиционной радиолокации и устройство для его осуществления / А.Л. Куликов (РФ); Куликов Александр Леонидович (РФ). - №2007102750; Заявлено 24.01.2007; Опубл. 27.08.2008. Бюл. 24. 5 с.: 1 ил.
3. Патент 2584689 РФ, МПК G01S 13/74. Многопозиционная система определения воздушных судов / Г.Н. Майков (РФ), А.В. Демидюк (РФ), Е.В. Демидюк (РФ); Майков Геннадий Николаевич (РФ), Демидюк Андрей Викторович (РФ), Демидюк Евгений Викторович (РФ). - №2014145250; Заявлено 11.11.2014; Опубл. 20.05.2016. Бюл. 14. 11 с.: 3 ил.
4. Патент 2591052. МПК G01S 5/06, G01S 13/95. Способ обнаружения и оценки радионавигационных параметров сигнала космической системы навигации, рассеянного воздушной целью, и устройство его реализации / В.В. Кирюшкин (РФ), Д.А. Черепанов (РФ), А.А. Дисенов (РФ), В.В. Неровный (РФ), А.В. Коровин (РФ), B.C. Ткаченко (РФ); Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации, Федеральное государственное казенное военное образовательное учреждение высшего профессионального образования «Военный учебно-научный центр Военновоздушных сил «Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж) Министерства обороны Российской Федерации. - №2014101847; Заявлено 21.01.2014; Опубл. 27.07.2015 Бюл. №21. 9 с.: 1 ил.







Симметричная вибраторная антенна с симметрирующим устройством
Радиопередающее устройство с автоматической регулировкой параметров спектра радиосигнала
Полосовой усилитель мощности увч- и свч- диапазонов с автобалансировкой плеч выходного каскада с квадратурным сумматором
Многодиапазонная антенная система круговой направленности на основе полуволновых вибраторов с устройствами симметрирования и согласования
Радиопередающее устройство с автоматической регулировкой параметров спектра радиосигнала
Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем
Способ определения плановых координат воздушного судна по измерениям пеленга неизвестного источника помехового излучения
Навигационная аппаратура санкционированного потребителя с возможностью локальной навигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем

