Результат интеллектуальной деятельности: СПОСОБ РЕАБИЛИТАЦИИ И ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ПОД АУДИОВИЗУАЛЬНЫМ САМОКОНТРОЛЕМ
Вид РИД
Изобретение
Изобретение относится к восстановительной медицине опорно-двигательного аппарата человека, а именно к контролю правильности выполнения движений частей тела при выполнении реабилитационных упражнений для восстановления суставов. [А61В 5/11]
Из уровня техники известно УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДВИЖЕНИЯ ТЕЛА [RU 2517766 С2, Опубликовано: 27.05.2014], реализующее способ определения движения тела живого организма на основании данных ускорения, указывающих изменение ускорения, вызванное движением тела живого организма, при этом способ определения движения тела содержит этапы, на которых: определяют изменение ускорения, которое возникает при закреплении рабочей части на основном блоке устройства или при раскреплении от него, на основании данных ускорения; и определяют движение тела на основании данных ускорения после закрепления или раскрепления посредством процедуры определения движения тела для режима, соответствующего состоянию после закрепления или раскрепления.
Недостатком аналога является то, что заявленное устройство не учитывает индивидуальные особенности пользователя при регистрации движений тела, что не позволяет определить реальную физическую нагрузку и работу опорно-двигательного аппарата.
Известен СПОСОБ ДИАГНОСТИКИ РАВНОВЕСИЯ ПРИ ДВИЖЕНИИ ТЕЛА [RU 2511402 С1, Опубликован: 10.04.2014], характеризующийся тем, что прикрепляют устройство определения равновесия при движении тела на средней линии живого организма, причем устройство определения равновесия при движении тела содержит блок получения сигнала, связанного с движением тела, который получает сигнал, связанный с движением тела, в котором определяется изменение в движении тела живого организма; блок определения равновесия при движении тела, который определяет равновесие при движении тела из сигнала, связанного с движением тела, полученного блоком получения сигнала, связанного с движением тела; и блок вывода результата, который выполняет вывод результата, основываясь на определенном при движении тела равновесии, причем блок определения равновесия при движении тела выполняет этапы, на которых: распознают путем процесса получения информации о ноге один единичный шаг из сигнала, связанного с движением тела, и получают информацию о ноге для каждой ноги живого организма; определяют путем процесса определения равновесия при движении тела равновесие при движении тела, основываясь на информации о ноге; определяют блоком определения, указывает ли сигнал, связанный с движением тела, на ходьбу, при этом определение равновесия при движении тела блоком определения равновесия при движении тела выполняется, когда определено, что ходьба имеет место; и диагностируют равновесие движения тела в соответствии с выводом результата, основываясь на равновесии при движении тела, полученном от блока вывода результата.
Основной технической проблемой аналога является то, что заявленный способ не предусматривает калибровку под пользователя, а также не учитывает его индивидуальные физиологические особенности, такие как возраст, вес, состояние опорно-двигательного аппарата, которые непосредственно сказываются на походке и могут давать грубые ошибки в определении равновесия для заданного движения тела, при этом отсутствует возможность самоконтроля правильности выполнения заданного движения тела.
Наиболее близким по технической сущности является способ реабилитации и восстановления двигательной активности под аудиовизуальным самоконтролем (US 2014296750 А1, 02.10.2014, далее Д1, описание [0003], [0101], [0374], [0381], [0418], [0451], [0471], [0551]-[0555], [0564], [0722], [0724]), характеризующийся тем, что устанавливают на теле модуль регистрации двигательной активности ([0034]-[0037], [0102], [0366]), датчиками ускорения регистрируют изменение положения модуля регистрации двигательной активности при движениях тела и отображают на пользовательском интерфейсе информацию о положении тела в пространстве ([ООН]), пациент в модуле контроля двигательной активности задает пороговый коэффициент ([0547], [0548], [0550]), а также выбирает реабилитационное упражнение ([0087], [0145], [0546]), после чего на пользовательском интерфейсе модуля контроля демонстрируют пример установки модуля регистрации двигательной активности, исходное положение конечности и пример выполнения упражнения ([0393], [0431]), после чего пациент устанавливает модуль регистрации двигательной активности на конечности ([0034]-[0037], [0102], [0366]) и сопрягает его по беспроводной связи с модулем контроля двигательной активности ([0436]), после этого придает конечности исходное положение ([0395]), при этом блок вычисления положения модуля регистрации двигательной активности принимает данное положение за исходное ([0402]), передает об этом сообщение по беспроводной связи в модуль контроля двигательной активности и кратковременно активирует вибромотор ([0380], [0569], [0761]), после чего пациент приступает к циклическому повторению восстановительного упражнения ([0404], [0411], [0471]), при этом блок вычисления положения модуля регистрации двигательной активности непрерывно производит вычисление текущего положения относительно исходного ([0177]) по датчикам ускорения ([0807]), угловой скорости ([0810]) и по беспроводной связи передает данные значения в модуль контроля, который производит вычисление траектории движения регистрирующего устройства ([ООП]), запоминает ее и с учетом порогового коэффициента сравнивает ее с шаблоном ([0383], [0418], [0534]), выводит на пользовательский интерфейс информацию о шаблоне упражнения, траектории движения модуля регистрации двигательной активности и о соответствии траектории его шаблону ([0025]-[0030], [0403]), в случае отклонения текущего положения модуля регистрации двигательной активности от шаблона за пределы индивидуального порога модуль контроля отображает данную информацию на пользовательском интерфейсе, сопровождая ее звуковыми сигналами или речевыми сообщениями о необходимости корректировки восстановительных движений ([0354], [0431], [0472], [0479]-[0481], [0603]-[0611]), и по беспроводному каналу связи передает в модуль регистрации двигательной активности информацию о выходе текущего положения модуля регистрации двигательной активности за пределы порога, о чем происходит оповещение пациента кратковременным включением вибромотора с целью корректировки восстановительных движений ([0472], [0481], [0569], [0570], [0761]), что обеспечивает персональную калибровку и возможность самоконтроля правильности выполнения восстановительных упражнений без присутствия тренера или врача-реабилитолога.
Отличие заявленного способа от известного состоит в том, что пороговый коэффициент является индивидуальным и зависит от возраста, веса и тяжести состояния сустава, что обеспечивает учет индивидуальных физиологических особенностей пациента.
Технической проблемой прототипа является то, что в этом методе используется механизм, как вариант с моторизированным приводом, в который закрепляется сустав, а датчики используются для управления не пациентом, а устройством, которое в свою очередь корректирует движения конечности пациента, создавая тем самым необходимую нагрузку, не допускает неправильные движения.
Таким образом, прототип не обеспечивает самоконтроля, то есть когда пациент сам способен корректировать движения, опираясь только на слух и видео. С точки зрения реабилитации это не является недостатком, но с точки зрения доступности и простоты в использовании - это явный недостаток прототипа, поскольку способ по прототипу не позволяет использовать подручные датчики, например смартфон и при этом требует присутствия тренера или врача-реабилитолога.
Следовательно, решение по прототипу не обеспечивает достижение части технического результата, связанного с возможностью самоконтроля правильности выполнения восстановительных упражнений без присутствия тренера или врача реабилитолога.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом заявленного изобретения является возможность обеспечения персональной калибровки и учета индивидуальных физиологических особенностей пациента, а также возможность самоконтроля правильности выполнения восстановительных упражнений без присутствия тренера или врача реабилитолога.
Указанный технический результат изобретения достигается за счет того, что способ реабилитации и восстановления двигательной активности под аудиовизуальным самоконтролем, характеризующийся тем, что устанавливают на теле модуль регистрации двигательной активности, датчиками ускорения регистрируют изменение положения модуля регистрации двигательной активности при движениях тела и отображают на пользовательском интерфейсе информацию о положении тела в пространстве, и после выбора реабилитационного упражнения, на пользовательском интерфейсе модуля контроля демонстрируют пример установки модуля регистрации двигательной активности, исходное положение конечности и пример выполнения упражнения, после чего пациент устанавливает модуль регистрации двигательной активности на конечности и сопрягает его по беспроводной связи с модулем контроля двигательной активности, после этого придает конечности исходное положение, при этом блок вычисления положения модуля регистрации двигательной активности принимает данное положение за исходное, передает об этом сообщение по беспроводной связи в модуль контроля двигательной активности и кратковременно активирует вибромотор, после чего пациент приступает к циклическому повторению восстановительного упражнения, при этом блок вычисления положения модуля регистрации двигательной активности непрерывно производит вычисление текущего положения относительно исходного по датчикам ускорения, угловой скорости и по беспроводной связи передает данные значения в модуль контроля, который производит вычисление траектории движения регистрирующего устройства запоминает ее и с учетом индивидуального порогового коэффициента сравнивает ее с шаблоном, выводит на пользовательский интерфейс информацию о шаблоне упражнения, траектории движения модуля регистрации двигательной активности и о соответствии траектории его шаблону, в случае отклонения текущего положения модуля регистрации двигательной активности от шаблона за пределы индивидуального порога модуль контроля отображает данную информацию на пользовательском интерфейсе, сопровождая ее звуковыми сигналами или речевыми сообщениями о необходимости корректировки восстановительных движений, и по беспроводному каналу связи передает в модуль регистрации двигательной активности информацию о выходе текущего положения модуля регистрации двигательной активности за пределы порога, о чем происходит оповещение пациента кратковременным включением вибромотора с целью корректировки восстановительных движений, отличающийся тем, что пациент в модуле контроля двигательной активности задает индивидуальный пороговый коэффициент исходя из возраста, веса, а также тяжести состояния сустава, а также выбирает реабилитационное упражнение, в качестве модуля регистрации двигательной активности используют смартфон со встроенными штатными датчиками ускорения и поворотов, при этом функции модуля контроля двигательной активности также реализуют на смартфоне, причем информация о соответствии траектории выполнения восстановительного упражнения заданному шаблону через вибромотор выдается не в абсолютных единицах, а в относительных, при этом пациенту выдается дискретная информация в виде "верно" или "не верно" и пользователь подстраивает свои движения для попадания в зону правильного выполнения упражнения самостоятельно без присутствия тренера; на корпусе модуля регистрации двигательной активности установлен магнит с целью крепления модуля, к ответному магниту для крепления модуля на конечности пациента или к ткани одежды, причем при креплении модуля к ответному магниту срабатывает магнетометр и активирует блок вычисления положения.
В частности, в блоке памяти модуля контроля двигательной активности сохраняют шаблоны выполнения восстановительных упражнений путем регистрации и усреднения траекторий движения модуля регистрации двигательной активности при выполнении восстановительных упражнений людей со здоровым состоянием суставов для разнообразных восстановительных упражнений.
В частности, в блоке памяти модуля контроля двигательной активности сохраняют индивидуальные шаблоны выполнения восстановительных упражнений путем регистрации и усреднения траекторий движения модуля регистрации двигательной активности при выполнении восстановительных упражнений пациентом с поврежденным суставом для данного восстановительного упражнения.
В частности, модуль контроля двигательной активности в блоке памяти запоминает значения датчиков ориентации модуля регистрации двигательной активности, результаты сравнения реальной траектории движения модуля регистрации двигательной активности с шаблоном выполнения восстановительного упражнения, а также о срабатывании порогов.
Краткое описание чертежей.
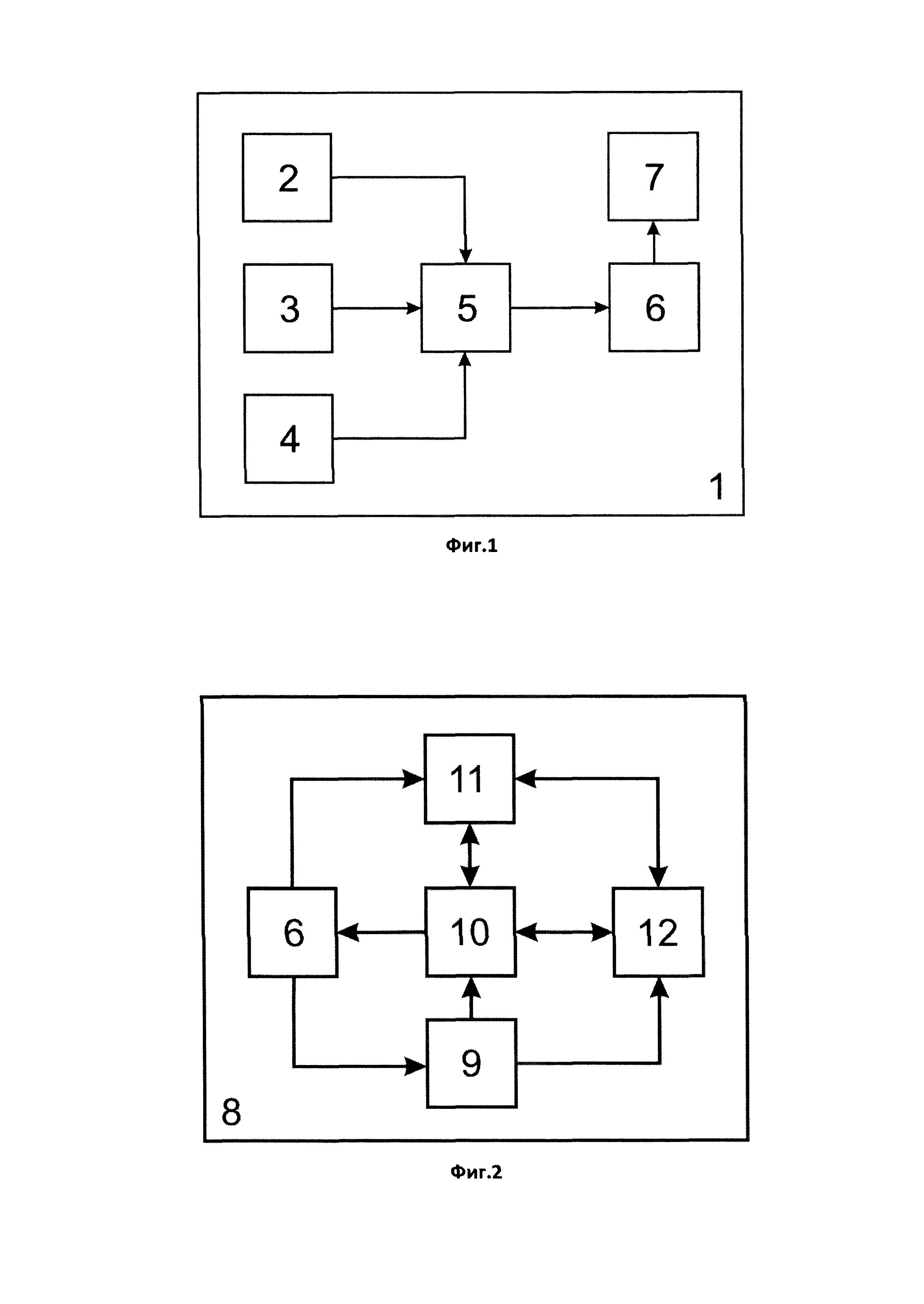
На фиг. 1 представлена блок-схема модуля регистрации двигательной активности.
На фиг. 2 представлена блок-схема модуля контроля двигательной активности.
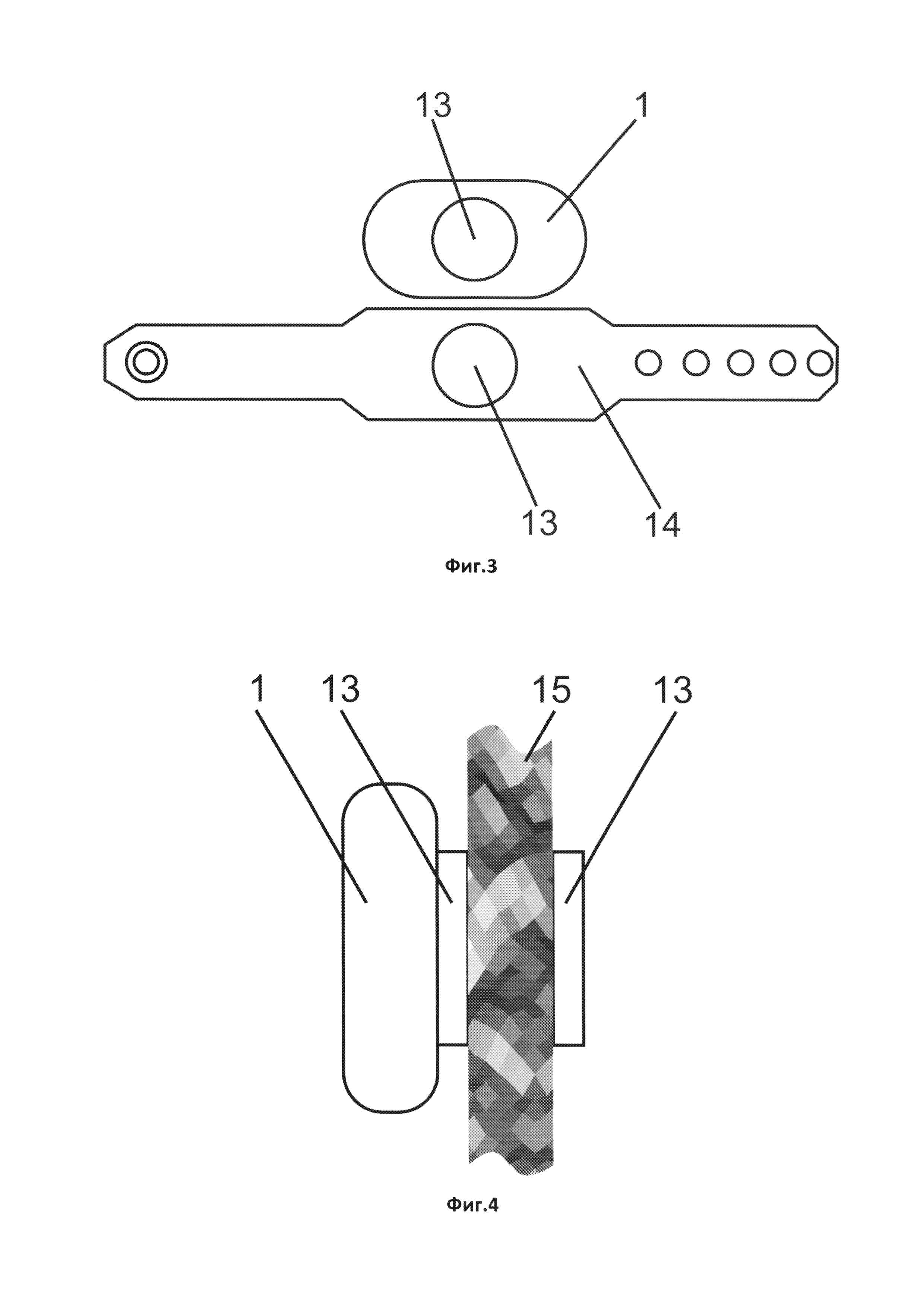
На фиг. 3 представлено схематичное изображение регистрирующего устройства с магнитным креплением на ремешке.
На фиг. 4 представлен пример установки модуля регистрации двигательной активности на одежде с помощью магнитного крепления.
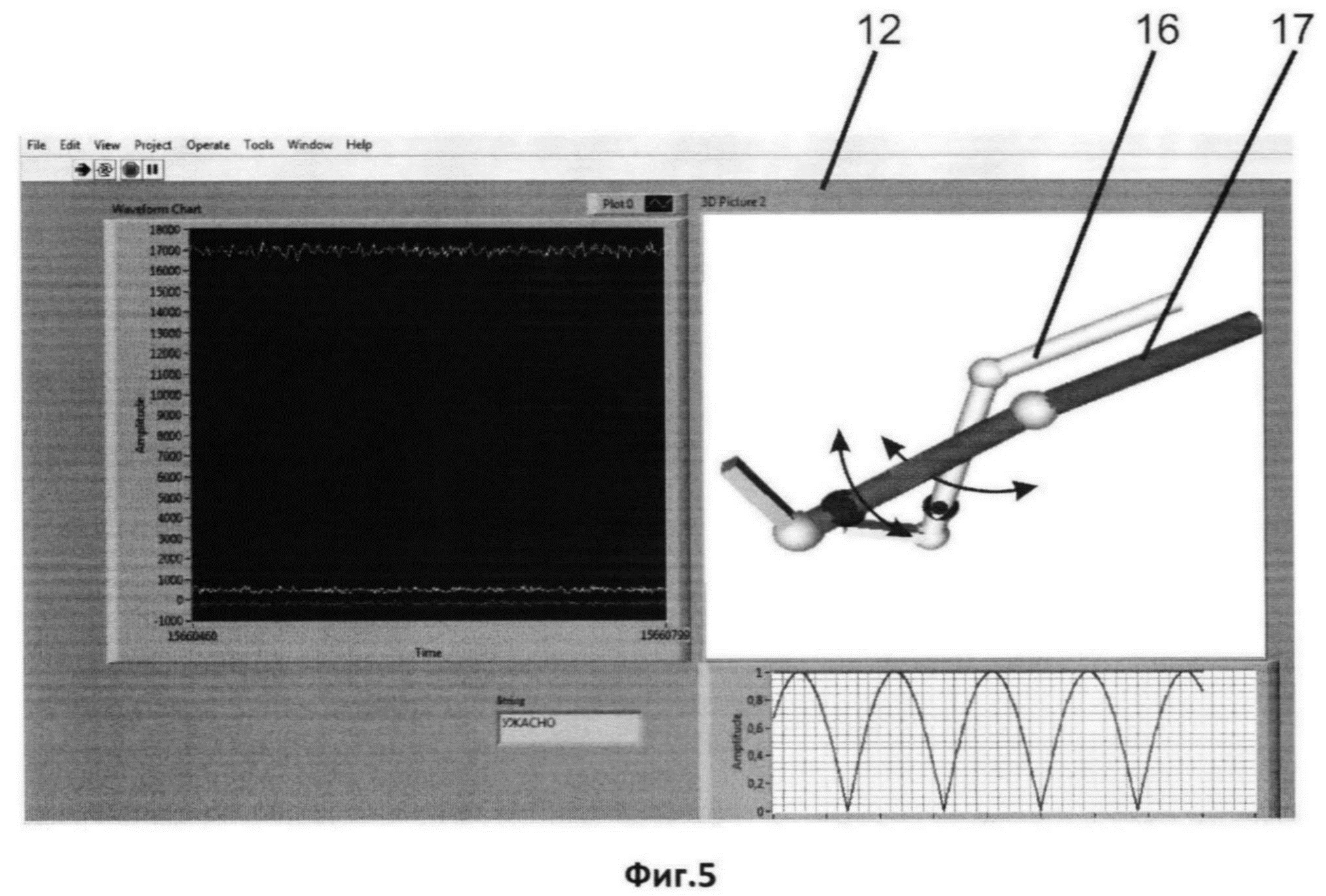
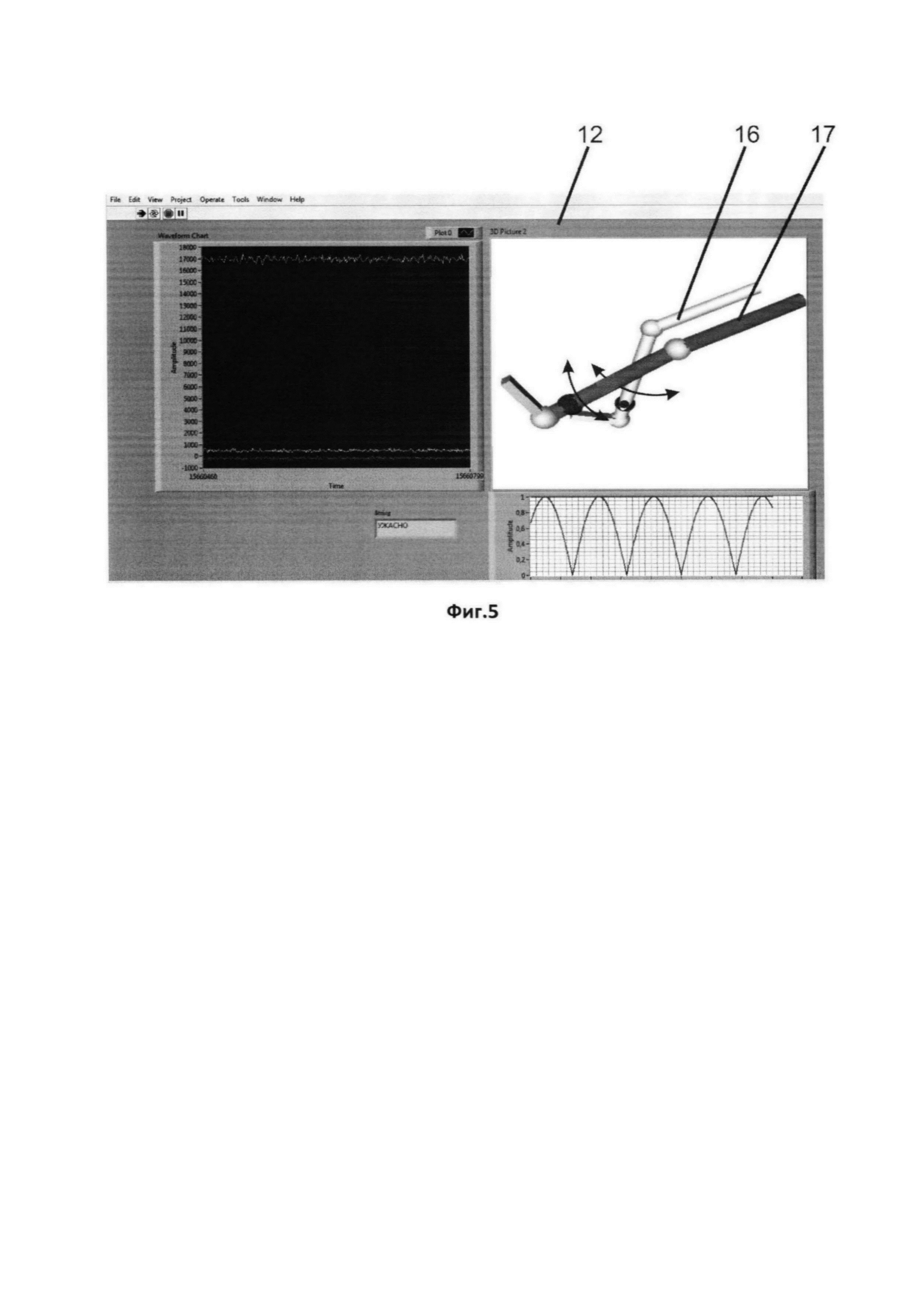
На фиг. 5 представлен пользовательский интерфейс с нанесенными шаблонными и индивидуальными данными о двигательной активности.
На фигурах обозначено: 1 - модуль регистрации двигательной активности, 2 - датчик ускорения, 3 - датчик угловой скорости, 4 - магнитометр, 5 - блок вычисления положения, 6 - приемо-передатчик беспроводной связи, 7 - вибромотор, 8 - модуль контроля двигательной активности, 9 - блок вычисления траектории, 10 - блок вычисления соответствия шаблона и траектории движения модуля регистрации двигательной активности, 11 - блок памяти, 12 - пользовательский интерфейс, включая средства аудиооповещения, 13 - магниты, 14 - ремешок, 15 - ткань одежды пациента, 16 - условно-графическое изображение шаблона конечности для выполнения восстановительного упражнения, 17 - условно-графическое изображение конечности пациента при выполнении восстановительного упражнения.
Осуществление изобретения
Способ реабилитации и восстановления двигательной активности под аудиовизуальным самоконтролем реализуется посредством совместной работы модуля регистрации двигательной активности 1 и модуля контроля двигательной активности 8.
Модуль регистрации двигательной активности 1 содержит датчик ускорения 2, датчик угловой скорости 3 и магнитометр 4, которые подключены к блоку вычисления положения 5. К выходу блока вычисления положения 5 подключен приемо-передатчик беспроводной связи 6, к которому также подключен вибромотор 7.
Модуль контроля двигательной активности 8 содержит приемо-передатчик беспроводной связи 6, который соединен с блоком вычисления траектории 9, блоком вычисления соответствия шаблона и траектории движения модуля регистрации двигательной активности 10 и блоком памяти 11, при этом указанные блоки также соединены с пользовательским интерфейсом 12.
В качестве модуля регистрации двигательной активности 1 можно использовать смартфон со встроенными штатными датчиками ускорения и поворотов, при этом функции модуля контроля двигательной активности 8 также можно реализовать на смартфоне.
Сопряжение регистрирующего устройства 1 и модуля контроля двигательной активности 8 выполнено с помощью приемо-передатчиков беспроводной связи 6.
Пользовательский интерфейс 12 может быть выполнен в виде сенсорного экрана со звуковым сопровождением.
На корпусе модуля регистрации двигательной активности 1 может быть установлен магнит 13 с целью крепления модуля 1, например, к ответному магниту 13 на ремешке 14 для крепления модуля 1 на конечности пациента или для крепления модуля 1 на теле пациента к ткани 14 одежды посредством второго магнита 13. В качестве магнитов 13 можно использовать неодимовые магниты.
В общем случае модуль регистрации двигательной активности 1 должен быть закреплен в районе действия сустава. Для этого используется простое прижатие ладонью в нужной точке, магнитная защелка для одежды, ремешки, обручи и повязки с карманами для устройства, прищепки на ремень и т.п.
Для питания блоков модуля 1 внутри его корпуса может быть смонтирован источник питания в виде батареи (на фигурах не показана).
Для качественного выполнения реабилитационных упражнений очень важен контроль самого факта их выполнения (мотивационный эффект), контроль нагрузки на сустав, контроль правильности выполнения упражнения для того, чтобы целевая нагрузка была сосредоточена именно в заданном суставе, при этом важным условием контроля является наличие обратной связи, работающей в реальном времени. Обратная связь нужна, чтобы пациент устройства мог управлять процессом выполнения упражнений, добиваясь лучших результатов по заданным критериям. Для этого заявленный способ реализует выполнение функций фиксации траектории движения модуля регистрации двигательной активности 1, а также сравнение с шаблоном и визуальное отображение на пользовательском интерфейсе 12 модуля контроля двигательной активности 8.
Способ реабилитации и восстановления двигательной активности под аудиовизуальным самоконтролем осуществляется следующим образом.
Первоначально пациент на пользовательском интерфейсе 12 модуля 8 задает индивидуальный пороговый коэффициент исходя из возраста, веса, а также тяжести состояния поврежденного сустава, который может быть представлен целочисленными значениями и выбирает восстановительное упражнение, состоящее из циклических возвратно-поступательных движений корпуса тела или конечности, амплитуды и траектории движения, а также количества повторений, которые определены на основе экспертной оценки врача в зависимости от анамнеза и текущего состояния определенного сустава.
Затем из блока памяти 11 считывают информацию и на пользовательском интерфейсе 12 демонстрируют пример установки модуля регистрации двигательной активности 1, исходное положение конечности и пример выполнения упражнения посредством анимации условно-графического изображения шаблона конечности при выполнении восстановительного упражнения 16. В зависимости от указанного на пользовательском интерфейсе 12 места установки, модуль 1 закрепляют либо на одежде пользователя путем соединения магнита 13, смонтированного на корпусе модуля 1 с аналогичным магнитом 13, расположенным с обратной стороны ткани 14 одежды (см. Фиг. 4), либо на конечности пользователя путем соединения магнита 13, смонтированного на корпусе модуля 1 с ответным магнитом 13, смонтированным на ремешке 14 (см. Фиг. 3), предварительно подогнанного по размеру конечности пациента.
При креплении модуля 1 к ответному магниту 13 срабатывает магнетометр 4 и активирует блок вычисления положения 5.
Затем пациент придает конечности исходное положение, при этом блок вычисления положения 5 модуля 1 принимает данное положение за исходное, передает об этом сообщение через блок 6 по беспроводной связи в модуль 8 и кратковременно активирует вибромотор 7. После чего пациент приступает к циклическому повторению восстановительного упражнения, при этом блок вычисления положения 4 непрерывно производит вычисление текущего положения относительно исходного по датчикам ускорения 2, угловой скорости 3 и по беспроводной связи через блок 6 передает данные значения в блок 6 модуля 8, который производит в блоке 9 вычисление траектории движения регистрирующего устройства запоминает ее в блоке 11 и с учетом индивидуального порогового коэффициента в блоке 10 сравнивает ее с шаблоном, выводит на пользовательский интерфейс 12 анимацию условно-графического изображения шаблона конечности 16 и анимацию условно-графического изображения конечности пользователя 17 и информацию о соответствии траектории его движения шаблону, в случае отклонения текущего положения модуля 1 от шаблона за пределы индивидуального порога модуль 8 контроля отображает об этом информацию на пользовательском интерфейсе 12, сопровождая ее звуковыми сигналами или речевыми сообщениями о необходимости корректировки восстановительных движений, по беспроводному каналу связи через блоки 6 передает в модуль 1 информацию о его выходе за пределы порога, о чем происходит оповещение пациента кратковременным включением вибромотора 7 с целью корректировки восстановительных движений, при этом на пользовательский интерфейс 12 может параллельно поступать команда для изменения характера движения, например, уменьшить амплитуду движений, делать движения более четко и т.п.
В соответствии с заявленным способом информация о соответствии траектории выполнения восстановительного упражнения заданному шаблону через вибромотор 7 выдается не в абсолютных единицах, а в относительных, при этом пациенту выдается дискретная информация в виде "верно" или "не верно" и пользователь подстраивает свои движения для попадания в зону правильного выполнения упражнения самостоятельно без присутствия тренера.
Настоящее изобретение реализует возможность калибровки 2 способами:
- в блоке памяти 11 сохраняют шаблоны выполнения восстановительных упражнений путем регистрации и усреднения траекторий движения модуля регистрации двигательной активности 1 при выполнении восстановительных упражнений людей со здоровым состоянием суставов для разнообразных восстановительных упражнений.
- в блоке памяти 11 сохраняют индивидуальные шаблоны выполнения восстановительных упражнений путем регистрации и усреднения траекторий движения модуля регистрации двигательной активности 1 при выполнении восстановительных упражнений пациентом с поврежденным суставом для данного восстановительного упражнения. Данная процедура эффективна для пациентов со сложными проблемами в суставах, когда от врача требуется начальная подгонка под конкретного пациента. Далее при прогрессе упражнений врач может переключить выполнение упражнений на стандартный шаблон.
Кроме того, настоящее изобретение позволяет задавать индивидуальный пороговый коэффициент, который отображает реальное текущее физиологическое состояние пациента, состояние его опорно-двигательного аппарата и состояние тяжести сустава (не болит, не комфорт, легкая боль, средняя боль, сильная боль).
Блок 10 в зависимости от реализации способа может определять порог отклонения текущей траектории от шаблона, отклонение скорости и амплитуды выполнения упражнения.
По окончании упражнения на экране пользовательского интерфейса 12 выдается оценка выполнения каждого цикла упражнения и всего упражнения.
Заявленный технический результат изобретения достигается за счет того, что настоящий способ обеспечивает согласованную работу модуля регистрации двигательной активности 1, который устанавливают на теле пациента для регистрации перемещения данной части тела при выполнении восстановительного упражнения и модуля контроля двигательной активности 8, на котором в режиме реального времени обеспечивается отображение соответствия анимированного изображения шаблона 16 и анимированного движения части тела пациента 17, а также тем, что перед выполнением восстановительного упражнения обеспечивается задание индивидуального шаблона и индивидуального порогового коэффициента правильности выполнения восстановительного упражнения, которые учитывают текущее физическое состояние пациента, в том числе состояние его опорно-двигательного аппарата и состояние поврежденного сустава.
Способ непрерывного контроля уровня напряженного состояния человека

