Результат интеллектуальной деятельности: Способ радиолокации
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано для локации объектов по внешним радиоизлучениям, в том числе радиомаяков, радио- и телецентров.
Известен способ пассивной радиолокации (патент РФ №2560089, 2015, G01S 13/00), включающий прием радиосигналов объекта не менее чем в трех пространственно-разнесенных пунктах и передачу их с периферийных на центральный пункт приема, где выполняют пространственно-временную обработку радиосигналов и определяют координаты объекта с учетом времени распространения электромагнитных волн и доплеровских сдвигов частот.
Недостатком способа является ограничение возможности применения условием наличия на объекте собственных источников радиоизлучения. Кроме того необходимо не менее трех пунктов приема с разветвленной системой связи для передачи принятых радиосигналов и управления.
Из известных наиболее близким к предлагаемому по технической сущности является способ разнесенной импульсной радиолокации (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. М., «Сов. радио», 1970, с. 10, 321-323), включающий излучение зондирующего радиоимпульса передатчиком, прием в удаленном пункте приема прямого сигнала передатчика с помощью ориентированной на него антенны и отраженного от цели сигнала с помощью сканирующей антенны или системы антенн, измерение углов прихода отраженного от цели сигнала, временного интервала между моментами прихода прямого и отраженного сигналов и расчет по результатам измерений дальности до цели от пункта приема, с учетом известного взаимного положения его и передатчика. При этом углы прихода отраженного от цели сигнала определяют по максимуму принятой от нее мощности, а момент прихода - по сигналу с этого направления.
Углы измеряют в общем случае в горизонтальной (азимут) и вертикальной (угол места) плоскости. Далее эти углы будем именовать пеленгом. Операции приема прямого и отраженного сигнала по физическому смыслу есть пространственная фильтрация, в данном случае высоконаправленными антеннами, ориентированными на цель и передатчик.
Способу-прототипу присущи следующие недостатки. В направлении передатчика и окружающего сектора образуется не рабочая зона, где прямой и отраженный сигналы не разрешаются по углам прихода и принимаются одновременно. В результате возникают недопустимые погрешности измерений пеленга цели и моментов запаздывания сигналов. Размеры зоны определяются шириной диаграммы направленности антенн и уровнем боковых лепестков исходя из необходимости подавления прямого сигнала до заданного относительно отраженного сигнала уровня для обеспечения потребной точности измерений. Учитывая, что плотность мощности отраженного сигнала существенно меньше, чем прямого сигнала трудно реализовать антенны требуемого размера, особенно в метровом диапазоне волн. Недостатком способа также является сложность проведения обзора системой узконаправленных антенн или большие временные затраты в случае применения одной сканирующей антенны.
Технической задачей данного изобретения является расширение рабочей зоны и уменьшение времени локации.
Поставленная техническая задача решается за счет того, что в известном способе радиолокации, включающем излучение зондирующего радиосигнала передатчиком, прием сигналов в удаленном пункте, определение направления на цель, пространственную фильтрацию прямого и отраженного сигналов и определение по ним и направлению на цель дальности до нее, согласно изобретению, прием сигналов осуществляют с помощью антенн, образующих антенную решетку, принятые сигналы преобразуют в угловой спектр с управляемым нулем приема на передатчик, направление на цель определяют по положению максимума этого спектра, после чего по принятым сигналам выполняют пространственную фильтрацию отраженного и прямого сигнала с управляемым нулем приема соответственно в направлении передатчика или цели.
Сущность изобретения заключается в том, что, в отличие от способа-прототипа, где необходимы высоконаправленные сканирующие антенны, предлагаемое решение состоит в объединении антенн в решетку, при снятии требования их высокой направленности, но формирования управляемого нулевого направления приема на передатчик или на цель. Ниже будет дан пример применения всенаправленных в горизонтальной плоскости антенн. Все направленность приема позволяет перейти от сканирования пространства высоконаправленными антеннами способа-прототипа к пространственно-временной обработке принятых сигналов, что упрощает и ускоряет процесс локации. Эту обработку выполняют последовательно в два этапа.
На первом этапе, принятые сигналы преобразуют в угловой спектр с нулем приема в направлении передатчика. Гарантированное формирование нуля приема в направлении передатчика обеспечивает расширение рабочей зоны вследствие сужения нерабочего сектора до прямой линии не зависимо от вида сигнала, в том числе, внешних непрерывных зондирующих излучений. Это свойство отсутствует в способе-прототипе, где максимум диаграммы ориентируют на цель или передатчик при не контролируемом уровне в направлении передатчика и цели.
В завершении первого этапа по положению максимума углового спектра определяют направление на цель, в виде пеленга на нее.
На втором этапе по принятым сигналам выполняют пространственную фильтрацию отраженного и прямого сигнала с нулем приема соответственно в направлении передатчика или цели. Данный этап может выполняться с приемом на дополнительном временном интервале или по ранее принятым сигналам их задержкой на время выполнения первого этапа.
Новые введенные операции предлагаемого способа с управляемым нулем приема могут быть выполнены по методике, приведенной в статье (Уфаев В.А. Потенциальные точности двухсигнального преобразования. Антенны. Вып. №5 (168), 2011, с. 44-47), с основными соотношениями (1), (2), (16), (17). Пример их осуществления приведен ниже.
Таким образом, предложенный прием сигналов с помощью антенн, образующих антенную решетку, пространственно-временная обработка принятых сигналов с управлением нулем направления приема: на передатчик или на цель, в соответствии с предложенными новыми действиями, условиями и порядком их выполнения, позволяет решить поставленную техническую задачу: расширить рабочую зону и уменьшить время локации.
Указанные преимущества и особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые фигуры.
На фиг. 1 представлена структурная схема системы радиолокации для реализации заявленного способа;
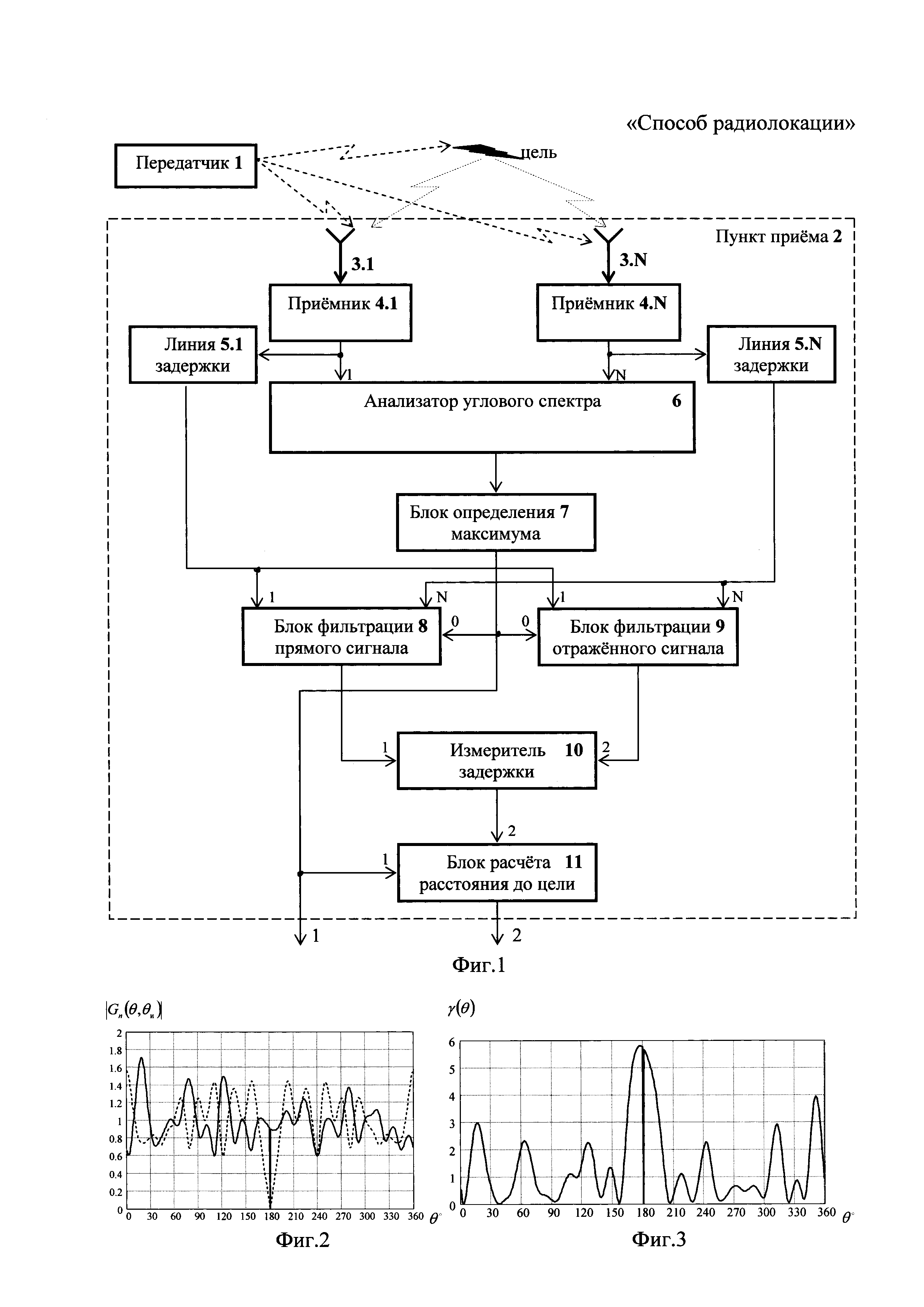
на фиг. 2 - диаграммы направленности парциональных приемных каналов;
на фиг. 3 - угловой спектр принятых сигналов.
Система радиолокации (фиг. 1), реализующая предложенный способ, содержит передатчик 1, пункт приема 2, содержащий антенны 3.1-3.N, приемники 4.1-4.N, линии задержки 5.1-5.N, анализатор углового спектра 6, блок определения максимума 7, блок фильтрации прямого сигнала 8, блок фильтрации отраженного сигнала 9, измеритель задержки 10 и блок расчета расстояния до цели 11. Приемники 4.1-4.N входами подключены к одноименным антеннам 3.1-3.N, а выходами к входам одноименных линий задержки 5.1-5.N и одноименным входам анализатора углового спектра 6, выход которого через блок определения максимума 7 подключен к нулевым входам блоков фильтрации 8, 9 и первому входу блока расчета расстояния до цели 11. Выходы линий задержки 5.1-5.N соединены с одноименными входами блока фильтрации прямого сигнала 8 и блока фильтрации отраженного сигнала 9. Выход блока фильтрации прямого сигнала 8 подключен к первому входу, а блока фильтрации отраженного сигнала 9, ко второму входу измерителя задержки 10, выход которого соединен со вторым входом блока 11 расчета расстояния до цели. Выходами пункта приема 2 являются выход блока определения максимума 7 и блока расчета расстояния до цели 11.
Передатчик 1 является автономным техническим элементом системы. На приемном пункте 2 известно его и собственное местоположение, частота, ширина спектра излучения. Наряду с передатчиком, организационно входящим в систему, могут использоваться известные сторонние излучатели: радиомаяки, радио- и телецентры.
Антенны 3.1-3.N идентичные, всенаправленные в горизонтальной плоскости, типа вертикальный вибратор. Образуют антенную решетку, например, кольцевую, параллельную земной поверхности, с эквидистаным расположением на окружности заданного радиуса, или объемную, дополненную антеннами на перпендикуляре из центра кольцевой решетки. (Уфаев А.В., Уфаев В.А. Синтез и исследование алгоритмов двухмерного пеленгования с применением объемной антенной решетки. Антенны. 2013. Вып. №5 (192) с. 53-58).
Приемники 4.1.-4.N цифрового типа обеспечивают квадратурный прием с представлением принимаемых сигналов отсчетами квадратурных составляющих. (Побережский Е.С. Цифровые радиоприемные устройства. - М.: Радио и связь, 1987, с. 63-73).
Линии задержки 5.1, 5.2 предназначены для обеспечения запаздывания сигналов на время пространственного обзора и определения направления на цель в блоке определения максимума 7.
Другие элементы пункта приема 2 могут выполняться в виде цифровых устройств. Особенность состоит в том, что в обеспечение работы анализатора углового спектра 6 и блоков фильтрации 8, 9 предварительно определяют диаграммы направленности парциальных каналов антенной решетки как функции пеленгов двух объектов с управляемым нулем приема от второго из них по формуле

где  - номер антенны и парциального канала при общем количестве N, θ1, θ2 - пеленг первого и второго объекта,
- номер антенны и парциального канала при общем количестве N, θ1, θ2 - пеленг первого и второго объекта,  - комплексная диаграмма направленности n-й антенны,
- комплексная диаграмма направленности n-й антенны,  - функция неопределенности, * - операция комплексного сопряжения.
- функция неопределенности, * - операция комплексного сопряжения.
Формула (1) принципиальна при управлении нулем приема. Обозначим пеленг передатчика θи, пеленг (истинный пеленг) цели θц, а возможный пеленг цели в пределах всего окружающего пространства как θ, где - π≤θ<π. Тогда видно, что в направлении передатчика, когда θ=θи, формируется просечка, ноль диаграммы направленности  Переменой мест аргументов в формуле (1) достигается формирование нуля приема в направлении цели.
Переменой мест аргументов в формуле (1) достигается формирование нуля приема в направлении цели.
Эффект просечки виден на примере диаграмм направленности первых двух парциальных каналов антенной решетки фиг. 2.
Здесь и далее иллюстрации предлагаемого способа даны применительно к локации неподвижной наземной цели с применением кольцевой антенной решетки, когда комплексные диаграммы направленности антенн определяют по формуле

где j - мнимая единица, π - 3,14…, R - радиус антенной решетки, λ - длина волны излучения, β=0 - угол прихода радиоволн в вертикальной плоскости.
Приняты следующие исходные данные: число антенн решетки N=9, относительный радиус R/λ=1,5, пеленг передатчика θи=180°.
Последующая локация цели в соответствии с предлагаемым способом происходит следующим образом.
Передатчик 1 излучает зондирующие радиосигналы. В пункте приема 2 принимают сигналы на частоте передатчика с помощью антенн 3.1-3.N и приемников 4.1-4.N. Принятые сигналы представляют собой смесь радиосигналов, прямого и отраженного от цели, с запаздыванием, пропорциональным расстоянию распространения, определяемому взаимным положением передатчика, пункта приема и цели. Пути распространения показаны на фиг. 1 пунктиром, тонкими пунктирными линиями для отраженного радиосигнала.
Принятые сигналы  где
где  - номер временного отсчета при общем количестве T, запоминают в линиях задержки 5.1-5.N, а в анализаторе 6 преобразуют в угловой спектр с максимумом на цель и нулем приема в направлении передатчика.
- номер временного отсчета при общем количестве T, запоминают в линиях задержки 5.1-5.N, а в анализаторе 6 преобразуют в угловой спектр с максимумом на цель и нулем приема в направлении передатчика.
При этом диаграммы направленности парциальных каналов определяют, как функции  возможного пеленга цели и пеленга передатчика.
возможного пеленга цели и пеленга передатчика.
Преобразование многократных временных отсчетов в угловой спектр осуществляют по следующей формуле

Преобразование включает следующие действия: квадратурное перемножение принятых сигналов  в различных сочетаниях пар антенн
в различных сочетаниях пар антенн 
 накопление в течение времени приема
накопление в течение времени приема  и усреднение по совокупности пар с весами равными квадратурным произведениям
и усреднение по совокупности пар с весами равными квадратурным произведениям  соответствующих пар диаграмм направленности парциальных приемных каналов.
соответствующих пар диаграмм направленности парциальных приемных каналов.
На фиг. 3 показан угловой спектр принятых сигналов, когда цель удалена от передатчика на угловое расстояние равное 2 градуса (азимут цели θц=178°), амплитуда отраженного от нее сигнала равна 10, относительно среднего квадратического значения шума приема, амплитуда прямого сигнала равна 200, количество временных отсчетов T=100. Наблюдается просечка углового спектра в направлении передатчика при одновременном максимуме в направлении цели. Последнее свойство является основой для определения направления на цель по максимуму углового спектра. Данная операция выполняется в блоке определения максимума 7, на выходе которого получают оценку пеленга цели 
Определив направление на цель (пеленг цели), выполняют пространственную фильтрацию сигнала отраженного от цели и прямого сигнала передатчика по принятым и задержанным на время получения пеленга цели сигналам, поступающим с линий задержки 5.1-5.N. Для фильтрации отраженного сигнала с нулем приема в направлении передатчика в блоке 9 сигналы когерентно суммируют с весами пропорционально значениям диаграмм направленности парциальных каналов  в направлении цели и передатчика.
в направлении цели и передатчика.
Процесс фильтрации описывается формулой

Масштабный коэффициент равный  введен для приведения результатов фильтрации к центру антенной решетки.
введен для приведения результатов фильтрации к центру антенной решетки.
Аналогично в блоке 8 выполняют пространственную фильтрацию прямого сигнала передатчика, но с нулем приема в направлении цели

В соответствии с соотношениями (4), (5) фильтрацию выполняют однотипно, переменой мест аргументов в диаграммах направленности парциальных приемных каналов.
Проведение пространственной фильтрации возможно также без применения линий задержки 5.1-5.N, путем приема сигналов на дополнительном временном интервале после определения в блоке 7 пеленга цели.
Заключительные действия выполняют, как и в способе-прототипе: измеряют задержку между отфильтрованными сигналами в измерителе 10, а в блоке 11 по полученному пеленгу и измеренной задержке рассчитывают расстояние до цели.
При локации воздушной подвижной цели измерение задержки выполняют с учетом доплеровского сдвига частот, а операции, описываемые соотношениями (1)-(5), как двухмерные по углам прихода радиоволн в горизонтальной и вертикальной плоскости.
Эффективность изобретения выражается в расширении рабочей зоны и уменьшении времени локации. Количественную оценку выполним следующим образом. Когда антенная решетка применяется для обзора пространства согласно способу-прототипу с формированием максимума диаграммы направленности решетки в направлении возможного положения цели, ширина основного лепестка ее диаграммы направленности равна Δθ=4⋅sin(1,23⋅λ/(2⋅π⋅R)) (Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических пеленгаторов. - М.: Радио и связь. 1977, с. 59), для рассматриваемого примера составляет 30°. С учетом уровня боковых лепестков такой антенной решетки -8 дБ зона расширяется дополнительно в 3-5 раз. По крайней мере, на эту величину увеличивается рабочая зона системы предлагаемым способом. Уменьшение времени локации обусловлено переходом от механического сканирования пространства узконаправленными антеннами способа-прототипа с периодом единицы-десятки секунд к пространственно-временной обработке занимающей единицы миллисекунд и составляет, таким образом, четыре порядка.
Таким образом, предложенное техническое решение обеспечивает расширение рабочей зоны системы, по крайней мере, в секторе 30° от излучателя и уменьшение на четыре порядка времени локации.
Способ радиолокации, включающий излучение зондирующего радиосигнала передатчиком, прием сигналов в удаленном пункте, определение направления на цель, пространственную фильтрацию прямого и отраженного сигналов и определение по ним и направлению на цель дальности до нее, отличающийся тем, что прием сигналов осуществляют с помощью антенн, образующих антенную решетку, принятые сигналы преобразуют в угловой спектр с управляемым нулем приема на передатчик, направление на цель определяют по положению максимума этого спектра, после чего по принятым сигналам выполняют пространственную фильтрацию отраженного и прямого сигналов с управляемым нулем приема соответственно в направлении передатчика или цели.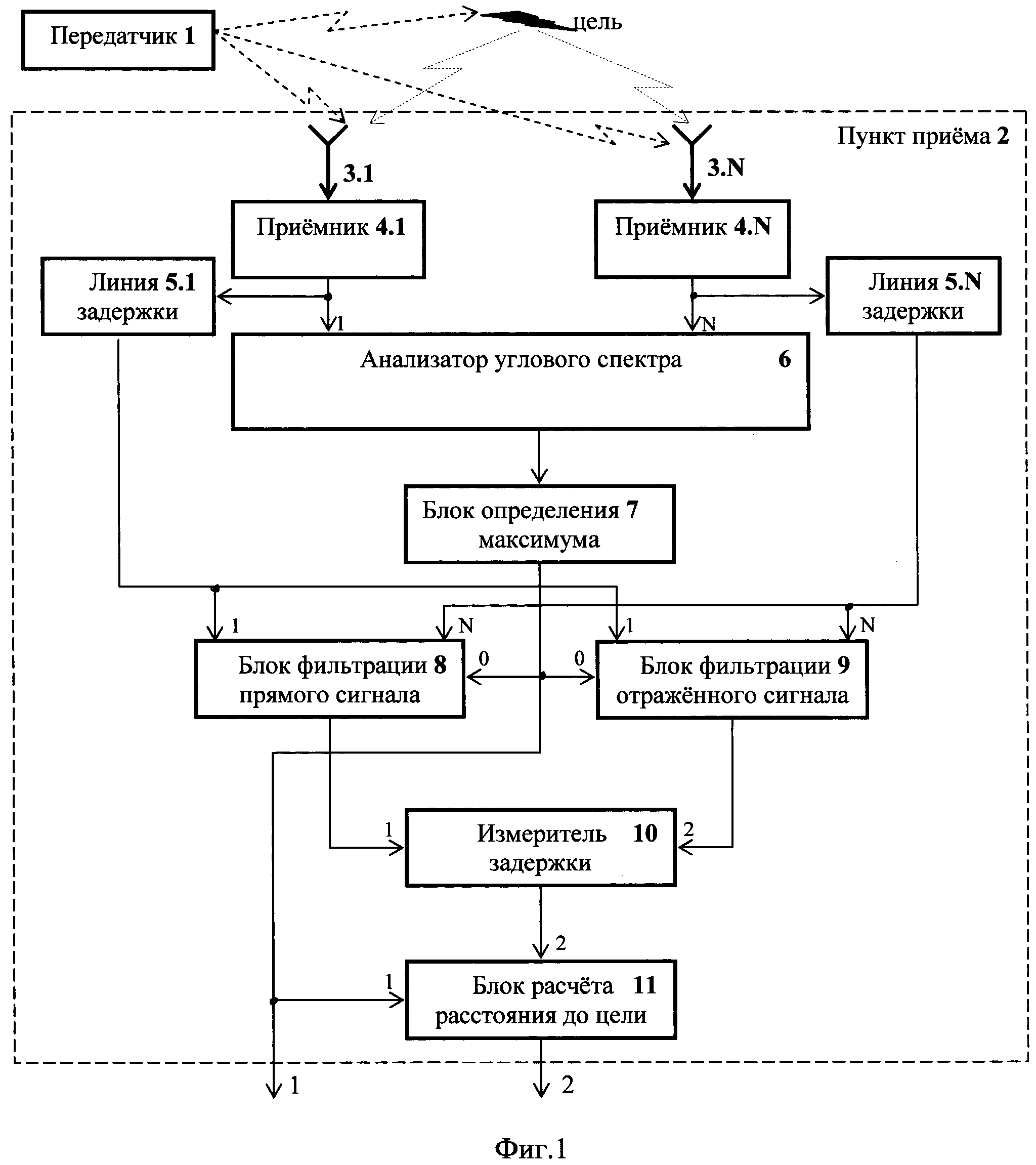
Способ поиска объектов на цифровых изображениях
Система автоматического управления коротковолновой связью
Система передачи информации
Способ поражения цели управляемым боеприпасом в сложной фоноцелевой обстановке
Способ определения электрофизических параметров метаматериалов
Способ наведения управляемого боеприпаса и устройство для его осуществления
Способ управления непрерывным процессом переэтерификации рапсового масла сверхкритическим этиловым спиртом
Способ формирования высокоскоростного канала связи между подводным и надводным объектами
Химический реактор для проведения процессов в гетерогенных средах
Способ маскировки объектов
Способ радиосвязи с пространственным разделением каналов

