Результат интеллектуальной деятельности: Система сбора и передачи телеметрической информации
Вид РИД
Изобретение
Предлагаемое изобретение относится к области телеметрии.
В качестве ближайшего аналога предлагаемого изобретения можно выделить систему адаптивного приема, анализа и передачи телеметрической информации, известную из патента на изобретение RU 2313816. Особенностью данного технического решения является то, что задают «n» уровней, распределенных равномерно в рабочем диапазоне датчика по амплитуде, с учетом рабочего диапазона датчика по частоте. Измеренные значения сравнивают с заданными значениями уровней. При совпадении значений измеренного сигнала и соответствующего уровня формируют код-метку, свидетельствующую о достижении параметром этого уровня. Затем передают информацию об изменении параметра по заданным уровням. Одновременно задают контрольные уровни, включающие пороговый уровень, в пределах которого информация не анализируется, предупредительный и предельный уровни. При этом каждый замеренный сигнал после сравнения с заданными «n» уровнями анализируют на соответствие типу процесса и регистрируют медленно меняющиеся процессы последовательно поступающими кодами-метками.
Однако, недостатками известной системы являются, во-первых, необходимость задания для каждого датчикового входа телеметрической системы набора контрольных уровней. Во-вторых, необходимость изменения для каждого нового контролируемого объекта набора контрольных уровней, что, в свою очередь, усложняет эксплуатацию телеметрической системы заказчиком. Кроме того, пороговые уровни устанавливаются расчетным путем, исходя из априорных сведений о датчиках и контролируемом объекте, что при возникновении не учтенной в расчетах нештатной или аварийной ситуации, может привести к потере ценной информации.
В свою очередь, предлагаемое изобретение направлено на дальнейшее повышение эффективности приёма и передачи телеметрической информации, а именно на увеличение потока информации от датчиков с возросшей динамикой при аварийной или нештатной ситуации на борту за счет датчиков с пониженной динамикой, без предварительного задания предупредительных и пороговых уровней.
Техническим результатом заявленного изобретения является максимальное возможное, исходя из имеющегося резерва информативности радиоканала, отображение проблемной области контролируемого объекта на приемной стороне, а также отсутствие необходимости проведения расчетов для задания контрольных уровней и, связанного с этим, риска потери ценной информации.
Для достижения технического результата предложена система сбора и передачи телеметрической информации, включающая совокупность бортовых локальных коммутаторов, аппаратно-программные средства обработки информации, линию передачи данных. В отличие от аналога, в составе аппаратно-программных средств обработки информации выделены подсистема сбора сообщений и блок формирования транспортного кадра. Подсистема сбора сообщений включает последовательно задействуемые: по меньшей мере, один блок локальных коммутаторов аналоговых датчиков медленно меняющихся параметров, и, по меньшей мере, один блок, обеспечивающий обработку данных в соответствии с математической моделью, основанной на использовании адаптивного разностного алгоритма, формирующего признак готовности выдачи пакета для каждого датчика и алгоритма прореживания. Блок формирования транспортного кадра, производящий обработку данных в соответствии с математической моделью, основанной на использовании алгоритма перераспределения информации и обеспечивающей формирование резерва информативности в кадре. Данные математические модели описаны в виде блок-схем на фиг. 1 – алгоритм перераспределения информации (АПИ); фиг. 2 – адаптивный разностный алгоритм (АРА), дополненный алгоритмом прореживания (АРАсП).
Система сбора и передачи телеметрической информации работает следующим образом.
В заявленной системе, предназначенной для сбора телеметрической информации медленно меняющихся параметров от цифровых (сигнальных), температурных и аналоговых датчиков, информация от которых занимает наибольшую часть общей информативности системы, предлагается задействовать алгоритм АРАсП, с целью уменьшения избыточности информации. За счет уменьшения информативности от датчиков с пониженной динамикой предлагается увеличить информативность от датчиков с возросшей динамикой при аварийной или нештатной ситуации на борту, задействовав алгоритм АПИ.
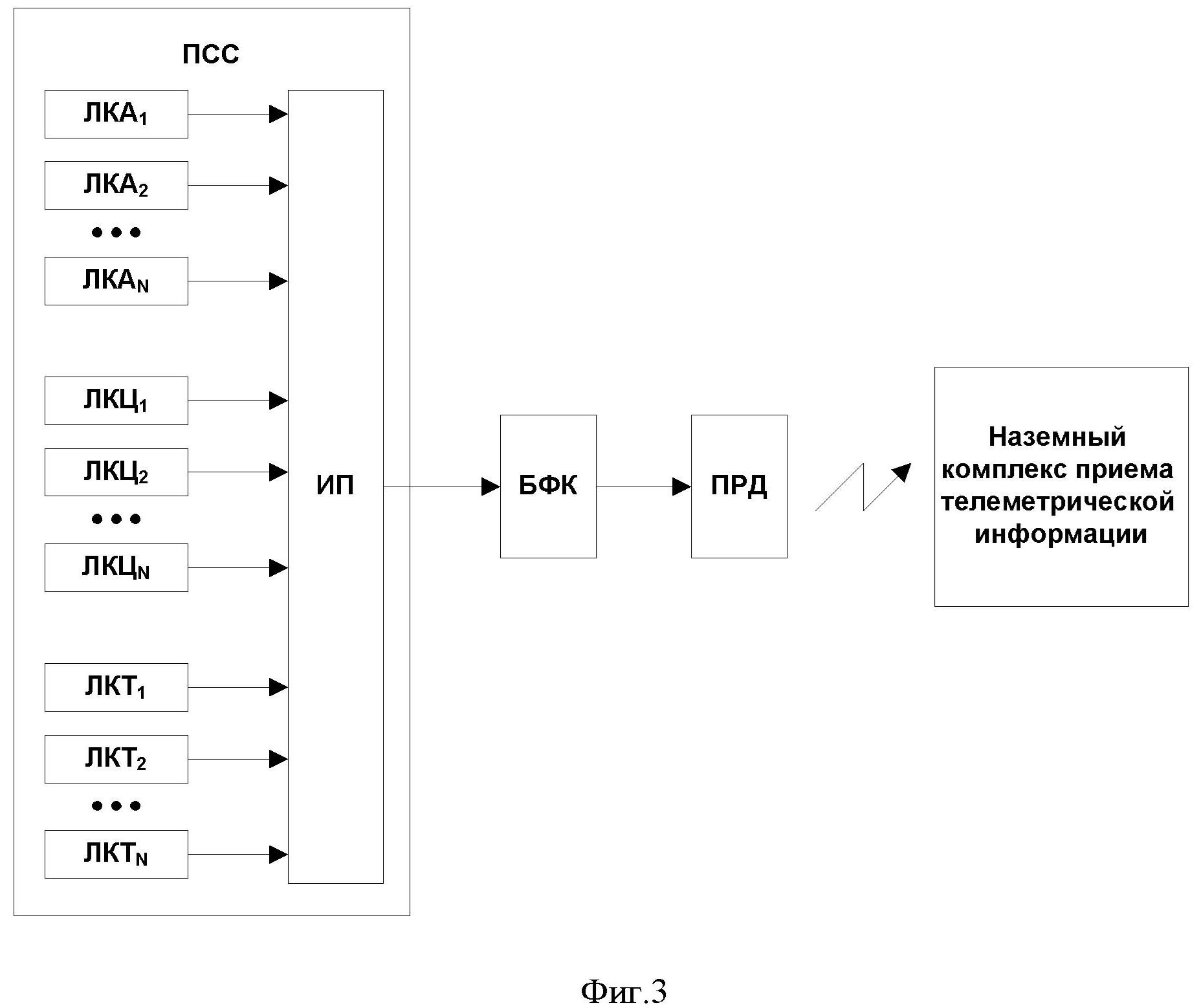
На фиг. 3 представлена блок-схема предлагаемой телеметрической системы.
Как правило, в составе телеметрической системы выделяют подсистему сбора сообщений (ПСС), блок формирования транспортного кадра (БФК), передающее устройство (ПРД) (см. фиг.3). ПСС строится на базе интерфейсной платы (ИП), осуществляющей связь с БФК различного набора типовых локальных коммутаторов (ЛК) датчиков: локальный коммутатор аналоговых датчиков (ЛКА), локальный коммутатор цифровых датчиков (ЛКЦ), локальный коммутатор температурных датчиков (ЛКТ). В случае распределенной структуры телеметрической системы ЛК объединяются в моноблоки сбора сообщений (МСС), каждый из которых имеет интерфейсную плату. Интерфейсная плата осуществляет сбор информации от всех ЛК в МСС, а также формирование и передачу пакетов с информацией в БФК.
Алгоритм АРА является основой модели снижения избыточности информации от аналоговых датчиков и представляет собой алгоритм, предназначенный для накопления информации от датчиков и формирования из нее пакетов данных. При передаче данных, используется пакет фиксированного размера. Сжатие данных происходит за счет передачи не самих измерений, а разности между соседними отсчётами. При этом, в процессе работы алгоритма определяется наибольшее число бит, которое занимает разность между соседними измерениями в пределах одного пакета (признак Δ). Этот признак Δ является показателем избыточности информации для входов с менее динамичным сигналом. Эффективность снижения избыточности можно увеличить алгоритмом АРАсП, совмещающим АРА с алгоритмом прореживания информации. В результате работы АРАсП увеличивается, пропорционально коэффициенту прореживания, максимальный коэффициент сжатия. Освободившаяся информативность используется для передачи информации от датчиков с большей динамичностью сигнала посредством АПИ.
Так как информация от датчиков поступает непрерывно, то алгоритм АПИ работает в цикле. Число измерений от одного датчика на максимальной частоте за время полного цикла АРАсП, соответствующее последнему шагу, определяет частоту выдачи кадров с пакетами от самых медленных датчиков.
Исходные данные для АПИ: Fк – кадровая частота, Тк – период выдачи кадров; fmax – максимальная частота опроса датчиков; fmin – минимальная частота опроса датчиков, полученная путем прореживания; fсред. – средняя частота опроса датчиков, полученная путем прореживания, tсред. – соответствующий период; Х – размер пакета датчика; Хинф – число байт в информационной части пакета; Y – разрядность АЦП; Nd – число аналоговых датчиков; Iср = Fк * Х * Nd – средняя (общая) информативность для всех датчиков; l – число измерений одного датчика на частоте fmax за время Тк. Область кадра, отведенная для данных от ЛКА, занимает Nd пакетов.
Для всех аналоговых датчиков задается средняя информативность, рассчитанная для пакетной передачи данных и достаточная для контроля параметров во время нормального пуска. При этом период выдачи кадров, период опроса датчиков на усредненной частоте, размер информационной части пакета, и число разрядов аналого-цифрового преобразователя должны быть связаны между собой следующим соотношением:
Тк = tсред·Хинф. То есть, за время, равное периоду выдачи кадров, должно накапливаться количество измерений со средней частотой опроса, равное числу измерений, умещающихся в пакет без сжатия. Максимальная частота опроса датчиков должна быть выбрана из расчета: fmax = fсред.·2m, где m = 1, 2, 3, … – ступень прореживания частоты для fсред. Следовательно, число пакетов без сжатия за время кадра будет равно 2m. Соответственно, для выдачи информации по максимуму от одного датчика в массиве датчиков должен быть резерв для (2m-1) пакетов.
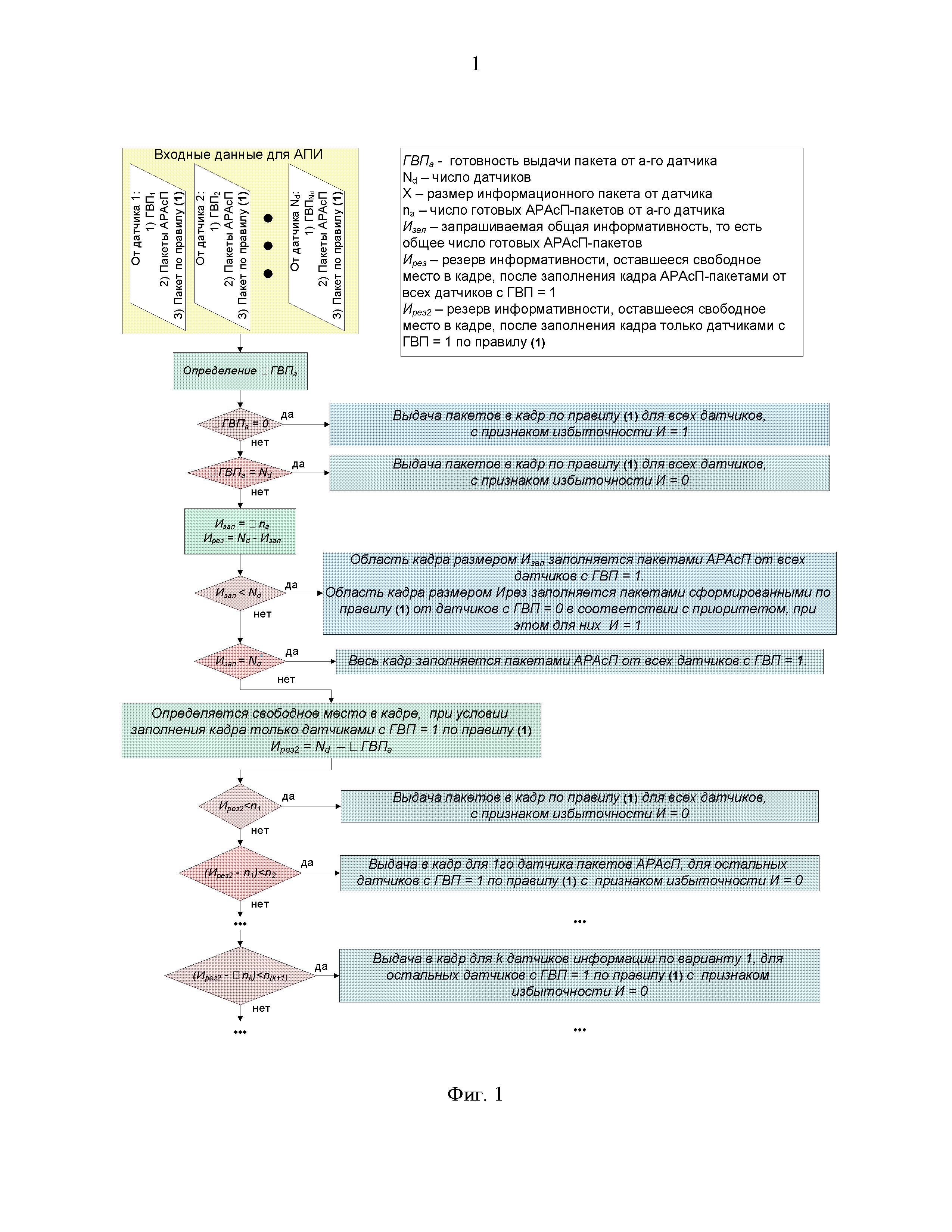
Для принятия решения о том, информацией от каких датчиков наполнять кадр к моменту выдачи, АПИ требуется дополнительная информация о каждом датчике: признак готовности выдачи АРАсП-пакета (ГВП), достаточно одного бита: ГВП = 0 – пакеты не готовы, ГВП = 1 – пакеты готовы к выдаче (признак ГВП необходим для определения резерва информативности кадра (Nрез), то есть числа датчиков, для которых АРАсП-пакеты не готовы); и общее число готовых пакетов (Nзап) определяемых по совокупности датчиков с признаком ГВП = 1.
Принятие решения о размещении АРАсП-пакетов в кадре основывается на результате сравнения Nрез, Nзап и Nd. При этом возможны четыре варианта:
1) Перераспределение не требуется, в кадре присутствуют все аналоговые датчики: при ГВП=0 от всех датчиков, и при ГВП=1 от всех датчиков. Т.е. ∑ГВП=0 и ∑ГВП=Nd – два крайних случая, когда перераспределение не работает. Вместо АРАсП-пакетов в кадр помещаются пакеты от всех датчиков, сформированные по следующему правилу прореживания (далее Правило 1): количество накопленных измерений делится на Хинф нацело, результатом деления которого является число p, и, соответственно, в пакет помещается каждое p–ое накопленное измерение.
2) При Nзап < Nd в кадр помещаются все АРАсП-пакеты от датчиков, приславших запрос (ГВП = 1), а в оставшееся место в соответствии с назначенным приоритетом помещаются пакеты от датчиков, не приславших запрос (ГВП = 0). Приоритет по умолчанию назначается в соответствии с номером датчика. Пакеты датчиков с ГВП = 0 наполняются по Правилу 1.
3) При Nзап = Nd в кадр помещаются все АРАсП-пакеты от датчиков, приславших запрос, заполняя кадр целиком.
4) При Nзап > Nd, и ∑ГВП < Nd определяется резерв информативности Nрез:
Nрез = Nd – Nзап.
Далее резерв информативности кадра заполняется готовыми АРАсП-пакетами от датчиков, приславших запрос ГВП=1 в соответствии с назначенным приоритетом. После исчерпания резерва информативности оставшиеся датчики, заявившие о готовности выдачи пакета, помещаются в кадр по правилу прореживания (по Правилу 1).
Следовательно, обеспечивается формирование адаптивного информационного потока от аналоговых датчиков медленно меняющихся параметров в бортовой радиотелеметрической системе. Телеметрическая система приобретает способность перераспределения информационного ресурса, что существенно поможет в процессе анализа информации на Земле локализовать проблемную точку, контролируемую датчиком с возросшей динамикой изменения контролируемого параметра.
Таким образом, в предлагаемой системе сбора и передачи телеметрической информации дополнительно предлагается проводить обработку информации от ЛКА в ИП по алгоритму АРАсП, то есть формировать для каждого датчика признак ГВП и два варианта пакетов: пакеты, сформированные с помощью алгоритма сжатия данных информации (АРАсП–пакеты) и пакеты, полученные путем прореживания накопленных измерений по Правилу 1.
Далее из сформированных пакетов, БФК формирует транспортный кадр следующим образом. В кадре для каждого типа пакетов (от ЛКА, от ЛКЦ, от ЛКТ) отводится фиксированная область. Информация от всех ЛКА обрабатывается по алгоритму АПИ, в результате чего появляется возможность размещения в кадре дополнительных пакетов от датчиков с возросшей динамикой за счет датчиков с пониженной динамикой.
Для ЛКЦ и ЛКТ обработка информации не производится, каждый цифровой (сигнальный) или температурный датчик находится на своем заранее определенном месте в транспортном кадре.
Сформированный таким образом транспортный кадр ПРД транслирует на землю.
Система сбора и передачи телеметрической информации, состоящая из подсистемы сбора сообщений от бортовых локальных коммутаторов аналоговых датчиков медленно меняющихся параметров, подсистемы формирования транспортного кадра, передающего устройства транспортного кадра на Землю, причем подсистема сбора сообщений от бортовых локальных коммутаторов аналоговых датчиков медленно меняющихся параметров включает последовательно первый блок обработки данных в соответствии с математической моделью, основанной на использовании адаптивного разностного алгоритма - определения разности между соседними измерениями в пределах одного пакета, с формированием пакетов данных, второй блок обработки данных в соответствии с математической моделью, основанной на использовании алгоритма прореживания, с формированием пакетов данных и признака готовности выдачи пакета для каждого датчика, а подсистема формирования транспортного кадра, определяющая по признаку готовности выдачи пакетов резерв информативности в кадре, обеспечивает обработку данных в соответствии с математической моделью, основанной на использовании алгоритма перераспределения информации с размещением в кадре дополнительных пакетов от датчиков с возросшей динамикой за счет датчиков с пониженной динамикой.

Способ оценки и максимизации предельного инструментального разрешения космического аппарата дистанционного зондирования земли на местности
Способ подавления канала передачи непрерывной информации путем воздействия на него организованной импульсной помехой
Способ формирования плат микроструктурных устройств со сквозными металлизированными отверстиями на монокристаллических кремниевых подложках
Способ краткосрочного прогноза землетрясений по данным вертикального зондирования ионосферы с ионозонда
Датчик определения заданного порога тока потребления
Криогенно-вакуумная установка
Интеллектуальная космическая система для управления проектами
Наземный автоматизированный комплекс управления космическими аппаратами на базе нейросетевых технологий и элементов искусственного интеллекта с использованием базы знаний на основе технологии блокчейн и способ управления его реконфигурацией
Способ назначения ip-адресов в сети персональной спутниковой связи на низкоорбитальных спутниках ретрансляторах с зональной регистрацией абонентских терминалов
Герметичный сборочный модуль для монтажа микрорадиоэлектронной аппаратуры, выполненный групповым методом с последующей резкой на модули
Прибор приема-передачи информационных массивов
Способ обработки термовидеоинформации и решающее устройство для определения температуры объекта при осуществлении способа
Способ обработки термовидеоинформации на борту космического аппарата и её отображения на наземной станции
Бортовая информационная система с радиолинией метрового диапазона волн
Устройство для сбора и обработки результатов телеметрических измерений
Многоцелевая модульная платформа для создания космических аппаратов нанокласса

