Результат интеллектуальной деятельности: ПРИВОД ТРАНШЕЙНОГО ЭКСКАВАТОРА
Вид РИД
Изобретение
Известны приводы траншейных экскаваторов, включающие двигатель, гидронасос, переменной производительности, регулирующее устройство с золотником, исполнительный орган и регулятор внешней нагрузки экскаватора.
Существующие устройства регулирования скорости рабочего хода, например, центробежные регуляторы только ограничивают заданную нагрузку на первичный двигатель и не обеспечивают возможности перехода от автоматического управления к ручному, необходимому в случаях заглубления, реверсирования и выглубления экскаватора.
Кроме того, в центробежных регуляторах небольшие неточности в зажатии пружины регулятора приводят к неполному использованию мощности первичного двигателя.
Описываемый привод позволяет осуществить автоматическое плавное нагружение первичного двигателя и периодическое подгружение его до номинальной мощности.
Все это создает условия для оптимального использования мощности первичного двигателя и, следовательно, приводит к повышению производительности экскаватора. Достигается это тем, что регулятор внешней нагрузки привода выполнен с тахометрическим датчиком числа оборотов двигателя и электрогидравлическим сервоприводом, воздействующим на гидронасос переменной производительности. Последний, в свою очередь, связан с исполнительным органом типа неполноповоротного гидромотора, который соединен с золотником, имеющим электромагниты, связанные с блоком управления.
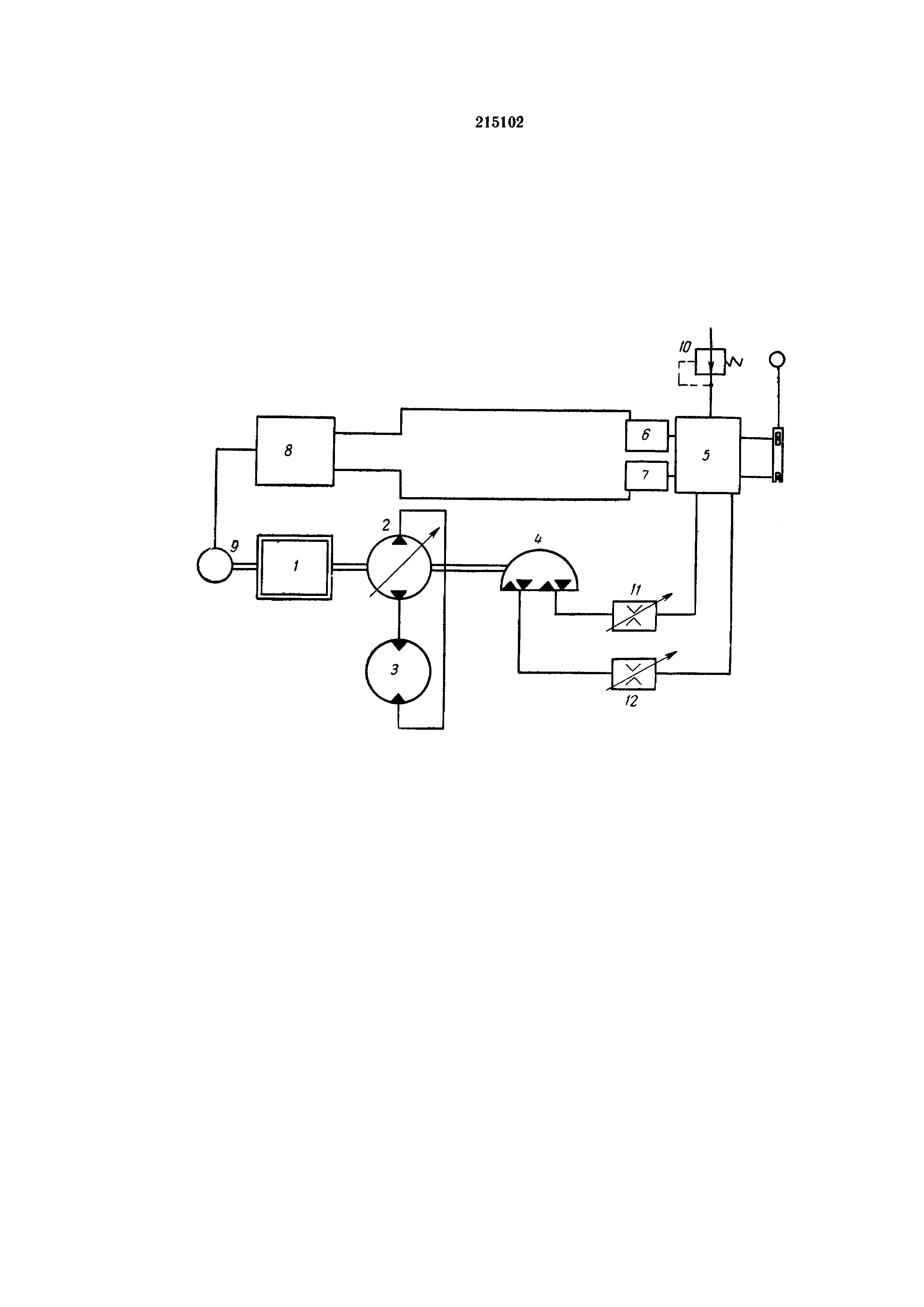
На чертеже показана схема описываемого привода.
Он состоит из первичного двигателя 1, который через редуктор отбора мощности приводит во вращение гидронасос 2 переменной производительности, соединенный трубопроводами с гидродвигателем 3 хода. Валик регулирования производительности гидронасоса жестко соединен с исполнительным органом, например, с неполноповоротным гидромотором 4.
Гидромотор 4 соединен двумя трубопроводами с золотником 5, который может управляться как автоматически от электромагнитов 6 и 7, так и вручную.
Электромагниты 6 и 7 подключены к выходам блока 8 управления. На вход блока управления подается напряжение тахогенератора 9, выполненного с тахометрическим датчиком числа оборотов двигателя и электрогидравлическим сервоприводам, воздействующим на гидронасос 2.
Для регулирования давления в гидравлической системе управления применяется регулирующий клапан 10, а для регулирования скорости поворота гидромотора 4 - дроссели и 12.
Включение в работу электромагнита 7 производится с помощью функционального элемента времени блока управления. Наличие в схеме блока управления функционального элемента времени устраняет возможность появления вынужденных колебаний в системе привода.
Работа привода осуществляется следующим образом.
При нагрузках первичного двигателя, меньших его номинальной (заданной) мощности, напряжение тахогенератора больше напряжения установки реле блока управления, и работает цепь электромагнита 7. Электромагнит переставляет поршень золотника в положение, обеспечивающее режим нагружения первичного двигателя за счет увеличения скорости гидродвигателя хода.
Когда нагрузка первичного двигателя больше номинальной, напряжение тахогенератора становится меньше напряжения установки реле и происходит переключение цепей, управляющих работой электромагнитов. Цепь электромагнита 7 обесточивается и включается электромагнит 6, который осуществляет перестановку поршня золотника в положение, обеспечивающее уменьшение производительности гидронасоса и, тем самым, разгрузку первичного двигателя.
При уменьшении нагрузки на первичный двигатель электромагнит 6 отключается и включается цепь электромагнита 7. В дальнейшем процесс повторяется.
С учетом того, что первичный двигатель имеет малую перегрузочную способность, скорость перемещения ротора неполноповоротного гидромотора в обратном направлении, обеспечивающем разгрузку первичного двигателя, установлена более высокой, чем в прямом направлении.
С целью наиболее полного использования мощности первичного двигателя, напряжение установки реле блока управления выбирается на 3-5% меньшим значения напряжения тахогенератора, соответствующего номинальной скорости.
При этом рычаг управления скоростью первичного двигателя устанавливается в фиксированное положение максимального скоростного режима.
Управление машиной и бесступенчатое регулирование скорости хода может осуществляться также вручную рукояткой ручного управления золотника 5.
Привод траншейного экскаватора, включающий двигатель, гидронасос переменной производительности, регулирующее устройство с золотником, исполнительный орган и регулятор внешней нагрузки экскаватора, отличающийся тем, что, с целью повышения коэффициента использования мощности двигателя и автоматического регулирования скорости, регулятор внешней нагрузки привода выполнен с тахометрическим датчиком числа оборотов двигателя и электрогидравлическим сервоприводом, воздействующим на гидронасос переменной производительности, который, в свою очередь, связан с исполнительным органом типа неполноповоротного гидромотора, соединенного с золотником, имеющим электромагниты, связанные с блоком управления.